Embed Size (px)
Citation preview

MATERIALS SCIENCE
Adaptive infrared-reflecting systemsinspired by cephalopodsChengyi Xu,1 George T. Stiubianu,1 Alon A. Gorodetsky1,2*
Materials and systems that statically reflect radiation in the infrared region of theelectromagnetic spectrum underpin the performance of many entrenched technologies,including building insulation, energy-conserving windows, spacecraft components,electronics shielding, container packaging, protective clothing, and camouflageplatforms. The development of their adaptive variants, in which the infrared-reflectingproperties dynamically change in response to external stimuli, has emerged as animportant unmet scientific challenge. By drawing inspiration from cephalopod skin, wedeveloped adaptive infrared-reflecting platforms that feature a simple actuationmechanism, low working temperature, tunable spectral range, weak angular dependence,fast response, stability to repeated cycling, amenability to patterning and multiplexing,autonomous operation, robust mechanical properties, and straightforwardmanufacturability.Our findings may open opportunities for infrared camouflage and other technologies thatregulate infrared radiation.
Materials and systems that statically reflectradiation in the short- to long-wavelengthinfrared region of the electromagneticspectrum have been studied for decadesand critically underpin the performance
ofmany entrenched technologies, including build-ing insulation (1), energy-conserving windows(2), spacecraft components (3), electronics shield-ing (4), container packaging (5), protective cloth-ing (6), and camouflage platforms (7). One highlydesirable but not easily attainable property forinfrared-reflecting materials (and related tech-nologies) is on-demand adaptability: precise andsensitive real-time dynamic responsiveness tochanges in the surrounding environment. Todate, only a limited number of adaptive infraredsystems, such as infrared camouflage platforms,have been reported because they must satisfystringent and demanding technical performancecriteria, making the development of these tech-nologies extremely challenging (a comparativeoverview for adaptive camouflage is providedin table S1). For example, thermochromic ma-terials can display substantial infrared emissiv-ity changes because of thermally induced phasetransitions but feature high operating temper-atures, hysteresis during cycling, and structuralcharacteristics that are difficult to control (8–12).In addition, infrared electrochromic devices haveoptical properties that can be altered with electro-chemical redox reactions but struggle with pre-cise spectral tunability and necessitate the useof inert noble metals in order to achieve func-tionality and stability (13–16). Moreover, certainmetamaterial-based systems can spatiotempo-rally modulate their emissivity through photo-generated carrier doping but use ultraviolet lightfor actuation, need elevated working tempera-
tures for adequate contrast, and display long re-covery times (17). Furthermore, thermal cloakingplatformsmodify the infrared signatures of otherobjects by manipulating the heat flow in the sur-roundings but require large temperature gra-dients and demand complete object immersion,restricting implementation (18, 19). Last, softrobots with integrated microfluidics can altertheir thermal appearance and infrared pattern-ing via the pneumatic injection of heated or cooledliquids but rely on the continuous flow of multipleliquids maintained at different temperatures andhave slow response times dictated by their ther-mal conductivities (20). Consequently, in orderto enable a broad range of practical applications(such as camouflage), the “ideal” adaptive infrared-reflecting system would simultaneously possessa simple actuationmechanism, lowworking tem-perature, tunable spectral range, weak angulardependence, fast response, stability to repeatedcycling, amenability to patterning and multiplex-ing, autonomous operation, robust mechanicalproperties, and straightforward manufacturabil-ity (table S1).
Biomimetic system design
As an active color-changing system, the skin ofcoleoid cephalopods (such as squid, octopuses,and cuttlefish) represents an exciting source ofinspiration (21–23). The patterning and color-ation of cephalopod skin can be altered auton-omously and repeatedly for the purposes ofconcealment or signaling, as illustrated for thesquid in Fig. 1A. Such remarkable feats of cam-ouflage are enabled by the sophisticated archi-tecture of the squid’s soft and flexible skin, inwhich innervateddermal layers contain chromato-phore pigment cells (as part of larger chromato-phore organs) and reflective cells called iridocytes(Fig. 1B) (21, 24, 25). The two cell types operate intandem but perform distinct optical functions(adaptive chromatophores are present in manycephalopods, but adaptive iridocytes have only
been identified in a few squid species to date)(21, 24–27). The adaptive chromatophore pig-ment cells contain pigment granule–packed in-ternal sacculi, which are expanded and contractedthrough the mechanical action of radial musclecells (Fig. 1C). These yellow, red, and brown cellsfeature response times of hundreds of milli-seconds and function as size-variable biologicalspectral filters that absorb and reflect visiblelight of specific wavelengths (21, 26). The adaptiveiridocytes contain alternating arrangements ofmembrane-enclosed nanostructured protein layersand extracellular space, for which the geometriesand refractive index differences are altered via abiochemical signaling cascade (Fig. 1D). Theseiridescent cells feature response times of tensof seconds and function like reconfigurable biol-ogical Bragg stacks that reflect visible light of var-iable wavelengths (21, 27). In part because of theproperties of these cells, the skin of squid (and byextension, other cephalopods) behaves as a dy-namic bioelectronic display, with the functionalitysummarized in table S1.The remarkable capabilities of cephalopod skin
and its components have inspired the engineer-ing of various adaptive artificial optoelectronicdevices (28–32). For example, dielectric elastomeractuators have been leveraged for cephalopod-inspired color-changing systems that functionwithin the visible region of the electromagneticspectrum (30–32). In the most basic incarnation,such devices consist of an elastomer membranesandwiched between two electrodes, where theapplication of a voltage between the electrodesinduces electrostatic pressure, leading to adecreasein the membrane’s thickness and an increase inthe overall electrodes’ areas (33–35). More gen-erally, such actuators, which essentially translateelectrical stimuli into mechanical outputs, havebeen explored for a variety of applications, includ-ing artificial muscles, pneumatic automation,energy generation, tactile displays, and adaptiveoptics (33–35). However, the technological via-bility of dielectric elastomer actuators has beenlimited by challenges associated with a require-ment for both high operating voltages and elec-trodeswith a demanding combination of properties(33–37). For infrared camouflage applications,the latter requirement is particularly dauntingbecause the electrode materials must simultane-ously demonstrate straightforward processabilityinto thin freestanding films, amenability to surfacemodification and patterning, excellent flexibilityand compliance, high conductivity that does notdrop upon deformation, transparency over a broadspectral range, lack of degradation under variablehumidity, and stability to repeated cycling.We designed a platform inspired by squid
skin’s highly evolved bio-optical componentswhile leveraging the technical foundation es-tablished for dielectric elastomer actuators.We conceptualized a device in a parallel platecapacitor–type configuration, which consists ofa proton-conducting bottom electrode, a dielec-tric elastomer membrane, a proton-conductingtop electrode, and an infrared-reflecting coating(Fig. 1, E and F). Before actuation, the devices
RESEARCH
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 1 of 6
1Department of Chemical Engineering and Materials Science,University of California, Irvine, Irvine, CA 92697, USA.2Department of Chemistry, University of California, Irvine,Irvine, CA 92697, USA.*Corresponding author. Email: [email protected]
on April 22, 2020
http://science.sciencem
ag.org/D
ownloaded from

feature relatively small but size-variable activeareas (Fig. 1E, left), analogous to cephalopodchromatophores (Fig. 1C, left) (26), with thesurfaces covered by a dense but geometricallyreconfigurable arrangement of reflective mi-crostructures (Fig. 1F, left), analogous to squidiridocytes (Fig. 1D, left) (27). After actuation, thedevices expand their active areas to modulatethe amount of absorbed incident infrared light(Fig. 1E, right)—again, analogous to cephalopodchromatophores (Fig. 1C, right) (26)—as wellas alter the geometry of their active areas’ mi-crostructured surfaces to modulate the relative
intensity of the reflected incident infrared light(Fig. 1F, right)—again, analogous to squid irido-cytes (Fig. 1D, right) (27).
System fabrication, characterization,and testing
We fabricated the cephalopod-inspired adaptiveinfrared-reflecting systems as detailed in thesupplementary materials. We adapted protocolsused for the lithographic fabrication of variousdielectric elastomer actuators (33–35) and choseto manufacture devices with centimeter-scaleactive areas, allowing for benchtop assembly
and simplifying spectroscopic characterization.For the compliant electrodes, we prepared filmsfrom a sulfonated pentablock copolymer that fea-tures exceptional protonic conductivity, withthe size and shape of the films defining the de-vice’s active area (38, 39). For the electroactivelayer, we mounted an acrylate dielectric elasto-mer membrane within a size-adjustable holderand equiaxially stretched the membrane. Sub-sequently, to facilitate experimentswithindifferentinfrared wavelength regimes, we produced twotypes of devices featuring chemically and struc-turally distinct infrared-reflecting coatings. In
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 2 of 6
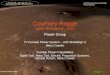
Fig. 1. Biological inspiration and system design. (A) Camera imagesof a squid changing its appearance in front of a rocky background.(B) An image of squid skin. The yellow, red, and brown circular regionsare chromatophores, and the underlying bright iridescent regions areiridocytes. (C) A schematic of a cephalopod chromatophores organ, inwhich a central chromatophore pigment cell is ringed by muscle cells. Theadaptive chromatophore pigment cells contain internal sacculi packedwith pigment granules (inset), and they are expanded and contractedthrough the mechanical action of the muscle cells. The chromatophorepigment cells function as size-variable biological spectral filters thatabsorb and reflect visible light of specific wavelengths. (D) A schematicof a squid iridocyte. The adaptive iridocytes contain alternatingarrangements of membrane-enclosed protein layers and extracellular
space (inset), for which the geometries and refractive index differencesare altered via a biochemical signaling cascade. The iridocytes functionlike reconfigurable biological Bragg stacks that reflect visible light ofvariable wavelengths. (E) A generic schematic of the top view of ourinfrared-reflecting platform (left) before and (right) after actuation.Described is the areal change for the active region upon actuation.(F) A generic schematic of the side view of our infrared-reflectingplatform (left) before and (right) after actuation. Described isthe surface morphology change for the active region uponactuation. [The images in (A) are reproduced from a video byH. Steenfeldt under the YouTube Creative Commons Attribution license,and the image in (B) was obtained by G. Hanlon and reproduced withpermission of R. Hanlon.]
RESEARCH | RESEARCH ARTICLEon A
pril 22, 2020
http://science.sciencemag.org/
Dow
nloaded from

order to fabricate broadband infrared-reflectingdevices, we used electron-beam evaporation todeposit a thin film of aluminum (Al) metal ontoa proton-conducting top electrode, which wasthen laminated onto a mounted acrylate mem-brane already outfitted with an unmodified bot-tom electrode (fig. S1A). In order to fabricate
narrowband infrared-reflecting devices, we usedelectron-beamevaporation to deposit alternatinglayers of titanium dioxide (TiO2) and silicondioxide (SiO2) directly onto the top electrode of amounted acrylate membrane, which was alreadyoutfitted with both the top and bottom electrodes(fig. S1B). For both device types, we mechanically
contracted the holder to release some of thetension introduced during the initial mountingof the membrane and thus introduced micro-structuring (wrinkles) to the surfaces of thedevices’ active areas. Last, when necessary forcharacterization, we transferred electrical lead-modified devices to rigid support frames. The
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 3 of 6
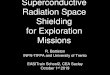
Fig. 2. Mechanical modulation of the broadband and narrowbandreflectance. (A) (Top) Schematics of an aluminum-modified device (left)before and (right) after mechanical actuation in an adjustable holder,illustrating the change in the surface morphology and the reflection ofinfrared light. (Bottom) The infrared reflectance spectra of an aluminum-modified device (left) before and (right) after mechanical actuation.The total reflectances (solid orange traces) are shown along with theirspecular (dotted yellow traces) and diffuse (dotted blue traces) compo-nents. (B) Digital camera images of an aluminum-modified device’sactive area (left) before and (right) after mechanical actuation. The yellowdashed square indicates the active area. (C) Optical microscope imagesof the surface morphology of an aluminum-modified device’s activeregion (left) before and (right) after mechanical actuation. (D) Scanningelectron microscopy images of the surface morphology of an aluminum-modified device’s active region (left) before and (right) after mechanical
actuation. (E) (Top) Schematics of a TiO2/SiO2 Bragg stack–modifieddevice (left) before and (right) after mechanical actuation in anadjustable holder, illustrating the change in the surface morphologyand the reflection of infrared light. (Bottom) The infrared reflectancespectra of a TiO2/SiO2 Bragg stack–modified device, with a peakreflectance intensity at 3 mm, (left) before and (right) after mechanicalactuation. The total reflectances (solid orange traces) are shownalong with their specular (dotted yellow traces) and diffuse (dotted bluetraces) components. (F) The infrared spectra of three unactuateddevices that have been designed to feature peak reflectance wavelengthsof 3 mm (red trace), 4 mm (green trace), and 5 mm (blue trace). (G) Plotsof the total (orange squares), specular (yellow triangles), and diffuse(blue circles) peak reflectances of the TiO2/SiO2 Bragg stack–modifieddevices as functions of the applied length strain. The lines representlinear fits of the data.
RESEARCH | RESEARCH ARTICLEon A
pril 22, 2020
http://science.sciencemag.org/
Dow
nloaded from

overall scalable procedure furnished infrared-reflecting systems with the general architec-ture depicted in Fig. 1, E and F.We investigated the effect of mechanical ac-
tuation (equiaxial strain) on the properties ofdevices with a broadband infrared reflectance(Fig. 2A). Before mechanical actuation, our de-vices possessed relatively small active areas(Fig. 2B) and relatively large thicknesses, withtheir surfaces coveredby adense three-dimensionalnetwork of micrometer-sized wrinkles, as revealedwith optical microscopy (Fig. 2C) and scanningelectron microscopy (Fig. 2D). The correspond-ing infrared spectra showed that the unactuateddevices featured a high average total reflectanceof 71 ± 3% (Fig. 2A, bottom left), a low averagetotal transmittance of <1% (fig. S2), and a mod-erate average total absorptance of 28 ± 2% (fig.S2). For the wrinkled surfaces, the total reflec-tance featured a weak average specular compo-nent of 23 ± 1% and a dominant average diffusecomponent of 48 ± 2%, in a ratio of ~0.5 (Fig. 2A,bottom left). By contrast, uponmechanical actua-tion, our devices possessed larger active areas(Fig. 2B) and smaller thicknesses, with the wrin-kles flattened into a quasi two-dimensional net-work of irregular domains, as revealedwith opticalmicroscopy (Fig. 2C) and scanning electron mi-croscopy (Fig. 2D). The corresponding infraredspectra showed that the actuated devices fea-tured an increased average total reflectance of96 ± 1% (Fig. 2A, bottom right), a low averagetotal transmittance of <1% (fig. S2), and a lowaverage total absorptance of 3 ± 1% (fig. S2). Forthe flattened surfaces, the total reflectance fea-tured amuch larger average specular component
of 88 ± 3% and a smaller average diffuse compo-nent of 8 ± 2%, in a ratio of ~11 (Fig. 2A, bottomright). For our devices, mechanical actuationdynamically modulated both the specular-to–diffuse reflectance ratios (owing to the change inthe morphology) and the total absorptance(owing to the change in the thickness) by ap-proximately an order of magnitude. Moreover,the specular component of the reflectance ex-hibited a weak angular dependence in the de-vices’ unactuated and actuated states (fig. S3).The changes in the devices’ infrared-reflectingproperties were consistent and fully reversibleupon repeated actuation, with no physical de-lamination and only minor performance degra-dation observed after 75 and 750 cycles (fig. S4).Thus, actuation of our devices induced a changein the microstructure of their active areas and en-abled concomitant reversible, angle-independent,and stable modulation of the broadband reflec-tance (and absorptance) within the short- to long-wavelength infrared region.We investigated the effect of mechanical ac-
tuation (equiaxial strain) on the properties ofdevices with a narrowband infrared reflectance(Fig. 2E). To obtain reflectances that featuredpeak wavelengths (lpeak) in the mid-wavelengthinfrared region of the electromagnetic spectrum,we used infrared-reflecting coatings composedof Bragg stacks, alternating TiO2 and SiO2 layerswith thicknesses of lpeak/(4*nTiO2) and lpeak/(4*nSiO2) (where nTiO2 and nSiO2 are the refractiveindices). This straightforward approach furnisheddevices with peak reflectance intensities at wave-lengths of 3, 4, and 5 mm (Fig. 2F). For suchnarrowband-reflecting devices, the optical prop-
erties were responsive to the applied strain, an-alogous to their broadband-reflecting counterparts.As a specific example, beforemechanical actuation,the infrared spectra obtained for representativemicrostructured (wrinkled) and relatively thickerdevices featured peak total reflectance intensitiesof 34 ± 3% at a wavelength of 3 mm, with a weakspecular component of 8 ± 1% and a dominantdiffuse component of 26 ± 2% in a ratio of ~0.3(Fig. 2E, bottom left). However, after mechan-ical actuation, the infrared spectra of the nowflattened and relatively thinner devices featuredincreased peak total reflectance intensities of55 ± 7% at a wavelength of 3 mm, with a muchlarger specular component of 29 ± 5% and anearly unchanged diffuse component of 26 ±2% in a ratio of ~1.1 (Fig. 2E, bottom right). Ingeneral, the devices’ total reflectances at thisspecific wavelength increased as a function ofthe strain (whereas the corresponding total absorp-tances presumably decreased) (Fig. 2G). The re-flectances’ specular components likewise increasedwith the strain, but the diffuse components re-mained relatively unaffected (Fig. 2G). Moreover,the changes in the devices’ infrared-reflectingproperties were fully reversible, with only minorperformance degradation observed after 100 ac-tuation cycles (fig. S5). Therefore, actuation ofour devices directly induced dynamic modula-tion of their reflectancewithin a specific narrowwavelength range of the infrared region.We studied electrical actuation of our devices
in a standard dielectric elastomer actuator con-figuration (Fig. 3A). In agreement with the mecha-nical actuation experiments, the devices possesseda relatively small active area with a wrinkled sur-face before electrical actuation, but a larger ac-tive area with a flattened surface after electricalactuation (Fig. 3A and movie S1). We found thatthe areal strain demonstrated an exponential de-pendence on the applied voltage, with a voltageof ~3.5 kV, resulting in amaximumstrain of ~230%(Fig. 3B). In addition, the areal strain exhibited adistinct dependence on the frequency of the ap-plied voltage; for example, a variable-frequencysquare waveform (minima of 0 kV and maximaof 3.2 kV) induced a drop in the maximum arealstrain from 181 ± 11% to 85 ± 5% between thefrequencies of 0.05 and 2 Hz, followed by an in-crease in the maximum areal strain to 110 ± 5%at a frequency of 16 Hz (Fig. 3C). Moreover, forthe aforementioned square waveform at a fre-quency of 0.5 Hz, the devices’ response time (de-fined as the rise time from 10 to 90% of the strainchange) was 720 ± 50 ms because of the rapidareal expansion and shrinkage rates of 55.8 ±1.6 and 56.8 ± 0.8% per second, respectively (Fig.3D), and the energy associated with device ac-tuation during one typical cycle was estimated tobe >8 J/m2 (supplementary materials). Thesesystems’ figures of merit were comparable withor even exceeded those reported for analogousacrylate dielectric elastomer–based devices withconventional ionic hydrogel, carbon grease, or con-ductive nanowire composite electrodes (36, 37).We showed electrical modulation of our sys-
tems’ infrared-reflecting properties inmultiple
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 4 of 6
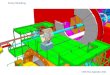
Fig. 3. Electrical characteristics of single devices. (A) (Top) Schematics of an aluminum-modified device (left) before and (right) after electrical actuation in a rigid frame, illustrating theareal change for the active region. (Bottom) Digital camera images of an aluminum-modified device’sactive region (left) before and (right) after electrical actuation. (B) A plot of the areal strain as afunction of the applied voltage for aluminum-modified devices. (C) A plot of the maximum arealstrain as a function of the frequency for square waveforms with identical minima of 0 kV and maximaof 3.2 kV. (D) A plot of the areal strain as a function of time for three consecutive cycles of asquare waveform with a frequency of 0.5 Hz, as well as minima of 0 kV and maxima of 3.2 kV.
RESEARCH | RESEARCH ARTICLEon A
pril 22, 2020
http://science.sciencemag.org/
Dow
nloaded from

configurations (Fig. 4). To this end, we preparednot only single devices but also three-by-threearrays in which such devices served as inde-pendently addressable “pixels” and then visu-alized both platforms with a thermal infraredcamera under an incident heat flux (supplemen-tary materials). We focused our experiments onaluminum-coated devices because of most com-mercial infrared cameras’ spectral range of 7.5 to14 mm. As an example, a representative single de-vice featured an apparent temperature differenceof ~3.6°C between its aluminum-coated activearea and the surroundingmembrane before elec-trical actuation (Fig. 4A), presumably becauseof the dominance of the reflectance’s diffusecomponent in the unactuated state. By contrast,the same device featured an increased appar-ent temperature difference of ~6.8°C between itsaluminum-coated active area and the surround-ingmembrane after electrical actuation (Fig. 4A),presumably because of the dominance of thereflectance’s specular component in the actu-ated state. The observed changes in the apparenttemperature were rapid, stable, and fully revers-ible over numerous distinct on/off cycles for suchdevices (movie S2). As another example, the de-vices in a representative array featured analogousmodulation of the apparent temperature differ-ences between their active areas and the surround-ing membranes upon device-specific, independentelectrical actuation (fig. S6). Multiple devices inthe arrays also readily exhibited tandem changesin their active areas’ local apparent temperatures(Fig. 4B). Indeed, electrical actuation of differentcombinations of sevenmultiplexeddevices enableddistinct representative arrays to “spell out” the let-ters “U,” “C,” and “I” (Fig. 4B). In principle, thegeneral fabrication approach is amenable to thefabrication of advanced displays with higher pixeldensities and/or submillimeter pixel sizes (35, 40).We demonstrated that our systems could oper-
ate without input from an external operator
(Fig. 5A). We connected electrically controlleddevices (with aluminum-coated active areas) to aremotely positioned, independently heated tem-perature sensor, which transduced thermal infor-mation from a distal environment while avoidingundesired cross-talk. At a sensor temperature of~26°C, a representative autonomous system pos-sessed a wrinkled active area and an apparenttemperature difference between the active areaand surroundingunmodifiedmembraneof~3.4°C,as revealed with digital and infrared camera im-aging, respectively (Fig. 5A). Upon a change in thetemperature of the sensor to ~34°C, the system’sactive area flattened and expanded by 18 ± 5%(relative to the initial value), and its apparenttemperature difference increased to ~3.7°C withrespect to the unmodified membrane (Fig. 5A).After a further rise in the sensor’s temperature to~42°C, the active area flattened and expandedfurther by 35 ± 6% (relative to the initial value),and its apparent temperature difference increasedto ~4.0°C with respect to the unmodified mem-brane (Fig. 5A). With an additional rise in thesensor’s temperature to ~48°C, the active areaflattened and expanded evenmore by 74 ± 3% (rel-ative to the initial value), and its apparent temper-ature difference increased to ~4.4°C with respectto the unmodified membrane (Fig. 5A). Over atemperature window of >20°C for the sensor,our autonomous system exhibited reproducibleand stable changes in the size of its active area(and apparent temperature), albeit in nonlinearfashion (fig. S7).Last, we evaluated the ability of our infrared
camouflage systems to conceal themselves underinfrared visualization (Fig. 5B). We prepared de-vices with aluminum-coated active areas in theshape of a swimming squid’s silhouette and thenimaged them with a thermal infrared cameraunder an incident heat flux above a surfacewith a locally elevated temperature (Fig. 5B andsupplementary materials). Before electrical ac-
tuation, a representative squid silhouette–shapeddevice featured a relatively small microstructured(wrinkled) active area (Fig. 5B) and a negligibleapparent temperature difference with the imme-diate surroundings that effectively made it invi-sible above a warm surface with a temperature of~35°C, as revealed with infrared camera imaging(Fig. 5B). By contrast, after electrical actuation,the squid silhouette–shaped device featured alarger flattened active area (Fig. 5B) and an ap-parent temperature difference of ~2°C with theimmediate surroundings that made it stand outas a specific shape, as revealed with infraredcamera imaging (Fig. 5B). In general, the observedchanges in appearance under infrared visualiza-tion were again rapid, stable, and fully reversibleover numerous distinct on/off cycles (movie S3).
Conclusion
By drawing inspiration from cephalopods, wehave developed and validated a new class ofadaptive infrared-reflecting materials and deviceswith an unprecedented combination of proper-ties. First, our artificial platforms translate manyof the key natural capabilities of cephalopodsfrom the visible to the infrared regions of theelectromagnetic spectrum (although in principlethey could be adapted for functionality withinthe visible). Second, our presented systems fea-ture capabilities and figures of merit that exceedormatch the state of the art for adaptive infraredcamouflage technologies (table S1). Third, thesystems have been intrinsically designed for readymanufacturability and straightforward integra-tion, potentially facilitating applications in dielec-tric elastomer–based artificial muscles, pneumaticautomation, energy generation, and adaptiveoptics (as well as in other areas). Last, the systemsmay enable new autonomous portable or wearablethermoregulatory technologies, although such ap-plications will likely require optimization of me-chanical actuation strategies or the reduction of
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 5 of 6
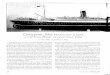
Fig. 4. Electrical modulation of the infrared appearance for singleand multiplexed devices. (A) (Top) Schematics of an aluminum-modifieddevice under a constant thermal flux (left) before and (right) afterelectrical actuation in a rigid frame, illustrating the change in the surfacemorphology and the reflection of infrared light. (Bottom) Infrared cameraimages of a representative aluminum-modified device’s active region (left)before and (right) after electrical actuation. The change in apparenttemperature and thermal appearance is represented by a change in color.
(B) (Top) Schematics of three-by-three arrays of multiplexed devices(left) before electrical actuation and (right) after selective electricalactuation of different device (pixel) combinations as the letters “U,” “C,”and “I.” (Bottom) Infrared camera images of representative three-by-threearrays of multiplexed devices (left) before electrical actuation and (right)after selective electrical actuation of different device (pixel) combinationsas the letters “U,” “C,” and “I.” The changes in apparent temperature andthermal appearance are represented by changes in color.
RESEARCH | RESEARCH ARTICLEon A
pril 22, 2020
http://science.sciencemag.org/
Dow
nloaded from

the associated operating voltages. Ultimately, thedescribed materials and devices may afford newpossibilities for the many modern technologiesthat rely on controlling the transfer of thermalradiation and thus may help transform manyaspects of daily life.
REFERENCES AND NOTES
1. I. Hernández-Pérez et al., Energy Build. 80, 81–105 (2014).2. U.S. Department of Energy, “Energy-efficient windows”;
https://energy.gov/energysaver/energy-efficient-windows.3. NASA, A shining example of space benefits (2007); www.nasa.
gov/vision/earth/technologies/silver_insulation.html.4. S. Geetha, K. K. Satheesh Kumar, C. R. K. Rao, M. Vijayan,
D. C. Trivedi, J. Appl. Polym. Sci. 112, 2073–2086 (2009).5. S. P. Singh, G. Burgess, J. Singh, Packag. Technol. Sci. 21,
25–35 (2008).6. J. F. Sacadura, J. Quant. Spectrosc. Radiat. Transf. 93, 5–24
(2005).7. L. V. Wake, R. F. Brady, Formulating Infrared Coatings for
Defence Applications (U.S. Defense Technical InformationCenter, 1993).
8. H. Ji et al., RSC Advances 7, 5189–5194 (2017).9. D. Liu, H. Cheng, X. Xing, C. Zhang, W. Zheng, Infrared Phys.
Technol. 77, 339–343 (2016).10. L. Xiao et al., Nano Lett. 15, 8365–8370 (2015).11. Z. Mao et al., Thin Solid Films 558, 208–214 (2014).12. M. A. Kats et al., Phys. Rev. X 3, 041004 (2013).13. Y. Tian et al., Sol. Energy Mater. Sol. Cells 170, 120–126
(2017).14. B. Kim et al., Nano Converg. 2, 19 (2015).15. P. Chandrasekhar et al., Adv. Funct. Mater. 12, 95–103
(2002).16. P. Chandrasekhar et al., Synth. Met. 135–136, 23–24 (2003).17. Z. J. Coppens, J. G. Valentine, Adv. Mater. 29, 1701275
(2017).18. R. Schittny, M. Kadic, S. Guenneau, M. Wegener, Phys. Rev.
Lett. 110, 195901 (2013).
19. T. Han, X. Bai, J. T. L. Thong, B. Li, C.-W. Qiu, Adv. Mater. 26,1731–1734 (2014).
20. S. A. Morin et al., Science 337, 828–832 (2012).21. L. M. Mäthger, E. J. Denton, N. J. Marshall, R. T. Hanlon,
J. R. Soc. Interface 6 (suppl. 2), S149–S163 (2009).22. R. Hanlon, Curr. Biol. 17, R400–R404 (2007).23. L. Phan et al., Chem. Mater. 28, 6804–6816 (2016).24. L. M. Mäthger, R. T. Hanlon, Cell Tissue Res. 329, 179–186
(2007).25. T. J. Wardill, P. T. Gonzalez-Bellido, R. J. Crook, R. T. Hanlon,
Proc. Biol. Sci. 279, 4243–4252 (2012).26. L. F. Deravi et al., J. R. Soc. Interface 11, 20130942
(2014).27. D. G. DeMartini, D. V. Krogstad, D. E. Morse, Proc. Natl. Acad.
Sci. U.S.A. 110, 2552–2556 (2013).28. C. Yu et al., Proc. Natl. Acad. Sci. U.S.A. 111, 12998–13003
(2014).29. C. Larson et al., Science 351, 1071–1074 (2016).30. Q. Wang, G. R. Gossweiler, S. L. Craig, X. Zhao, Nat. Commun.
5, 4899 (2014).31. J. Rossiter, B. Yap, A. Conn, Bioinspir. Biomim. 7, 036009
(2012).32. J. Rossiter, A. Conn, A. Cerruto, A. Winters, C. Roke, Proc. SPIE
9056, 905620 (2014).33. F. Carpi, D. De Rossi, R. Kornbluh, R. Pelrine, P. Sommer-Larsen,
Dielectric Elastomers as Electromechanical Transducers(Elsevier, 2008).
34. J. Biggs et al., Angew. Chem. Int. Ed. 52, 9409–9421(2013).
35. F. Carpi, Electromechanically Active Polymers (Springer,2016).
36. S. Rosset, H. R. Shea, Appl. Phys., A Mater. Sci. Process. 110,281–307 (2013).
37. D. McCoul, W. Hu, M. Gao, V. Mehta, Q. Pei, Adv. Electron.Mater. 2, 1500407 (2016).
38. J. H. Choi, C. L. Willis, K. I. Winey, J. Membr. Sci. 394–395,169–174 (2012).
39. Y. Fan, M. Zhang, R. B. Moore, C. J. Cornelius, J. Membr. Sci.464, 179–187 (2014).
40. S. Akbari, H. R. Shea, J. Micromech. Microeng. 22, 045020(2012).
ACKNOWLEDGMENTS
The authors thank I. Gorodetskaya and L. Bagge for invaluablediscussions and A. Yee’s laboratory for the use of an opticalmicroscope. The authors thank G. Hanlon and R. Hanlon forthe use of the image in Fig. 1B. The authors thank KratonPolymers for their support and assistance, by providing samplesof NEXARpolymers for use in the project, and for theirappreciation of the benefits from university research. Funding:The authors are grateful to the Advanced Research ProjectsAgency–Energy (cooperative agreement DE-AR0000534), theDefense Advanced Research Projects Agency (cooperativeagreement HR0011621411), and the Air Force Office ofScientific Research (grant FA2386-14-1-3026) for their financialsupport. Author contributions: C.X. and A.A.G. conceived,designed, and interpreted the experiments. C.X. carried outthe experiments. G.T.S. aided with the interpretation of thespectroscopic measurements. C.X. and A.A.G. wrote themanuscript. Competing interests: C.X., G.T.S., and A.A.G.are listed as inventors on a provisional U.S. patent application(no. 62/643403) from the University of California, Irvine,which describes the design and working principle of thereported adaptive infrared-reflecting platforms. Data andmaterials availability: All data needed to evaluate theconclusions in the paper are present in the paper and/or thesupplementary materials.
SUPPLEMENTARY MATERIALS
www.sciencemag.org/content/359/6383/1495/suppl/DC1Materials and MethodsFigs. S1 to S7Table S1References (41–49)Movies S1 to S3
17 November 2017; accepted 16 February 201810.1126/science.aar5191
Xu et al., Science 359, 1495–1500 (2018) 30 March 2018 6 of 6
Fig. 5. Autonomous operation and reversible concealment of devicesin the infrared. (A) (Top) Schematics of a sensor-connected, aluminum-modified device. The remote sensor is positioned in a different localthermal environment, with increasing temperatures of ~26, ~34, ~42,and ~48°C (from left to right). (Middle) Digital camera images of arepresentative device’s active region at the different sensor temperatures.(Bottom) Infrared camera images of the same device’s active regionat the different sensor temperatures. Shown are the expansion and changein thermal appearance for the autonomous device’s active region, withincreasing local temperature for the sensor. (B) (Top) Schematics of a
squid silhouette–shaped, aluminum-modified device maintained undera constant thermal flux and positioned above a warm surface (left)before and (right) after electrical actuation. (Middle) Digital cameraimages of a representative squid silhouette–shaped, aluminum-modified device’s active region (left) before and (right) after electricalactuation. (Bottom) Infrared camera images of the same squidsilhouette–shaped, aluminum-modified device’s active region (left)before and (right) after electrical actuation. The device alters its thermalappearance and becomes distinguishable from the background onlyafter actuation.
RESEARCH | RESEARCH ARTICLEon A
pril 22, 2020
http://science.sciencemag.org/
Dow
nloaded from

Adaptive infrared-reflecting systems inspired by cephalopodsChengyi Xu, George T. Stiubianu and Alon A. Gorodetsky
DOI: 10.1126/science.aar5191 (6383), 1495-1500.359Science
, this issue p. 1495Scienceinfrared profile.electrical activation. This changed the infrared reflectivity and, thus, the effective temperature of the object observed in itsrefractive index. The authors designed structures that were wavy to begin with so that they could be flattened out by
started with a basic Bragg reflector made up of multiple layers of alternating materials with varyinget al.sensing. Xu developed that showed dynamic tuning of the effective temperature, it might be possible to hide objects from infrared
Thermal vision cameras detect differences in temperature by sensing infrared wavelengths. If a coating could beNow you see it, now you don't
ARTICLE TOOLS http://science.sciencemag.org/content/359/6383/1495
MATERIALSSUPPLEMENTARY http://science.sciencemag.org/content/suppl/2018/03/28/359.6383.1495.DC1
REFERENCES
http://science.sciencemag.org/content/359/6383/1495#BIBLThis article cites 40 articles, 5 of which you can access for free
PERMISSIONS http://www.sciencemag.org/help/reprints-and-permissions
Terms of ServiceUse of this article is subject to the
is a registered trademark of AAAS.ScienceScience, 1200 New York Avenue NW, Washington, DC 20005. The title (print ISSN 0036-8075; online ISSN 1095-9203) is published by the American Association for the Advancement ofScience
Science. No claim to original U.S. Government WorksCopyright © 2018 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of
on April 22, 2020
http://science.sciencem
ag.org/D
ownloaded from