Embed Size (px)
Citation preview

University projects
MSc. MSc. Marek Marek ŠuplataŠuplata
marek.suplata at gmail.com at stuba.sk
SLOVENSKÁ TECHNICKÁ UNIVERZITA V BRATISLAVEFakulta elektrotechniky a informatiky
SLOVAK UNIVERSITY OF TECHNOLOGY IN BRATISLAVAFaculty of Electrical Engineering and Information Technology

Marek Šuplata
2
Moving objects tracker
Position: Programmer
Name of project: Optical flow detector
Project description: Moving objects tracker
Description: Application aimed at counting moving object especially moving cars. Information about car flow density can be used for traffic prediction.
Project designed and developed by me during 10 months.
Source code size: about 1100 lines = 26kB of C++ code
Tasks: all phases of application development cycle
Technologies: C++, Trolltech Qt4.3, MATLAB
Platforms: Microsoft Windows, Linux

Marek Šuplata
3
Simulator of coordinating productions
Project description: Simulator of coordinating productions
Description: Simulator of coordinating productions via TCP/IP socket server communication. Server part can handle more clients due to the pthread design.
Project designed and developed by me during 3 months.
Source code size: about 48 kB of ANSI C code
Tasks: all phases of application development cycle
Technologies: C language under Linux POSIX environment,
nCurses

Marek Šuplata
4
Position: Programmer
Name of project: Biometrix
Project description: Human Face Biometric System
Description: Human face recognition prototype application based on the state-of-the-art knowledge and algorithms in the field of feature extraction, computer vision and artificial intelligence. GUI, machine & image processing algorithms constitutes separate synchronized threads. Face recognition done on video stream in near real time.
keywords: two dimensional principial component analysis, linear discriminant analysis, probabilistic neural network, feature extraction & fusion, L1 sparse representation
Project designed and developed by me during 1.5+ year.
Source code size: about 2800 lines = 80 kB C++ code
Tasks: all phases of application development cycle
Technologies: C++, Trolltech Qt 4, Intel OpenCV, GNU Gsl
Platforms: Microsoft Windows, Linux
Face biometric recognition system

Marek Šuplata
5
Medical CT volume data visualization
Position: Researcher & Developer
Project description: Volumetric Data Visualization
Description: The main goal is to develop application able automatically preprocess 3D volume data and extract necessary information for clear visualization. Research will be aimed on soft computing methods able to learn underlying structure in data and use of massive parallel GPU performance for image pre/post processing phases and data classification. Project is in alpha state.
Technologies: Visual C++, Nokia Qt 4.6, OpenGL, GLSL, Matlab prototyping
Platforms: Microsoft Windows

Marek Šuplata
6
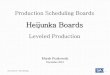
Power network blackouts monitor
Position: Programmer
Project description: Power network blackouts monitor
Description: Application designed to monitor voltage & frequency range of 230V power network and to store every blackout to HTML file. Data acquisition is done via programmable digital measurement instruments with GPIB interface.
1. Running with more synchronized threads.
2. Uses special GUI widgets (charts, LED lights).
Project designed ,developed & tested by me during 2 months.
Source code size: about 2800 lines = 51 kB of C++ code
Tasks: all phases of application development cycle
Technologies: C++, MFC, Microsoft Visual C++ 6.0, GPIB, ICSP
GPIBController
DMMVoltage
GPIB
DMMFrequency
GPIB
HTML LOGfile
WRITE
READ

Marek Šuplata
7
Other university mini projects
• Visual system: counting and recognition of simple objects - about 67 kB of C++ code – Borland C++ Builder IDE
• x86 assembler (Turbo Assembler) about 12 kB of code – work with numbers, files, strings sorting
• Control logic for school model of mini robot - 6DOF, interpolation, trajectory recording, control HW unit with IN/OUT instructions – about 1300 lines of C code
Personal mini projects:
• Python – small utilities cca 6kB – e.g. Web pages information parser• Basic programming skills with DSPs – Texas Instrument C5xx, C6xx, &
Analog Devices + Simulink digital filter design (FIR, IIR)• AD converter programming - calculation of signal parameters• Global optimization applications – genetic algorithms, differential evolution• Machine learning – genetic algorithm, adaBoost, FF neural network (C/C++)

Marek Šuplata
8
Work shift report maker

Marek Šuplata
9
Work shift report maker - Microsoft Excel XML output

Marek Šuplata
10
Study curriculum

Marek Šuplata
11

Marek Šuplata
12

Marek Šuplata
13
• Thank you for attention

Marek Šuplata
14
Motion control projects in Matlab/Simulink

Marek Šuplata
15
DCS600 PID positional servosystem
Position: Developer
Name of project: Positional servosystem
Project description: Synthesis of control algorithms (torque generator + position discrete PID) of DCS600 positional MASTER-SLAVE servosystem.
Tasks: all phases of development cycle + experiments with
real device
Technologies: MATLAB, Simulink, RT toolbox

Marek Šuplata
16
PID synthesis
s
p p p d 22
p p i p i d iURO 2 3
p p p d2 3p p i
A(s)
p d i i
i
K K K Ts s
K K Ts K TT s J T J JG
K K B K TK K Ts s B K T T J Tss s s
J T J J
p p p d
i
K K B K Ts s s
JTs s k
Js
J2 3 2 2
0 0 02
p p p d
i
kK K B K
k s k s sT
s s sJ T J J
3 2 2 2 30 0 0 0 0
2 3 2 2
d
BT
k
J
J
k0
20
2
1 2 pK J k20 1 2
iTk
k 0
1 2

Marek Šuplata
17
DCS600 PID positional servosystem
Comparison RealTime experiments vs. Simulink model
Position error = desired – actual positionPosition error = desired – actual position

Marek Šuplata
18
Asynchronous motor + Direct Vector Control loops design
*
*
*
m m mw w w
m m m
w w w
mm
w
m m w m m
w w
w
w
I 1 1 I 1 1 1 1K K P K
s T s 1 Js B s T s 1 Js B T s 1 Js B
I K 1 P K I K 11s T s 1 Js B T s 1 Js B s T s 1 Js B
I KI K 1s T s 1 Js B
I K 1 P K s T s 1 Js B I K s P K1s T s 1 Js B
s T s 1 Js B
s T sT s 1 Js B1 Js B
m m
3 2w m m w w m m
I K I K
s T s 1 Js B I K s P K JT s s T B J s B P K I K
0
m
20w
2 2JT BkP
K
30 w
m
JIk T
K

Marek Šuplata
19
Asynchronous motor + control loops design
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
mag
netic
ky to
k
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
2
4
6
X: 1.457Y: 1.725
prud
Is1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
X: 1.471Y: 0.1066
cas [s]
prud
Is2
X: 0.755Y: 0.002767

Marek Šuplata
20
Asynchronous motor + control loops design : Load experiments
0 0.5 1 1.50
20
40
60
80
100
120
cas [s]
uhlo
va r
ýchl
ost
[ra
d.s
-1]
Vysetrovanie vplyvu skokovej zataze v zavislosti od pasma priepustnosti
*
0=25
0=30
0=20

Marek Šuplata
21
Other projects …
Genetic algorithms: Optimization ( control loop parameters setup) Identification ( servosystem parameters)
Recent project:Artificial neural network based velocity estimation = sensorless structure. Real-Time testing with dSPACE & asynchronous motor.

Marek Šuplata
22

Marek Šuplata
23
ANN parameter settings
• Sampling time: 1 ms
• Sensor layer: 4 input neurons
• 1 hidden layer: 12 tansig neurons
• Output layer: 1 linear neuron
• Training method: Levenberg-Marquardt
• 60 training epochs
• Identified normalization constants:
is2 : 0.1938
us2* : 103.6436
Normalization for range <-1;+1>
Normalization constant for *

Marek Šuplata
24
1.5 2 2.5 325
30
35
40
Filtracia klzavym priemerom N=15
1.5 2 2.5 325
30
35
40
Povodny nefiltrovany signal
dSPACE experiments - *=35 rad/s
0 0.5 1 1.5 2 2.5 30
10
20
30
40
50
cas [s]
[
rad.
s-1]
Estimácia rýchlosti na báze UNS
0 0.5 1 1.5 2 2.5 30
10
20
30
40
50
cas [s]
[
rad.
s-1]
Filtrácia klzavým priemerom N=15
mean = 34.553var = 5.407
mean = 34.552var = 1.026

Marek Šuplata
25
dSPACE experiments - *=+-10 rad/s
1.5 2 2.5 3 3.5 4 4.5 5
4
6
8
10
12
14
16
Filtracia klzavym priemerom N=15
cas [s]
[
rad.
s-1]
1.5 2 2.5 3 3.5 4 4.5 5
4
6
8
10
12
14
16
Povodny nefiltrovany signal
cas [s]
[
rad.
s-1]
0 2 4 6 8 10-15
-10
-5
0
5
10
15
[
rad.
s-1]
Estimácia rýchlosti na báze UNS
0 2 4 6 8 10-15
-10
-5
0
5
10
15
[
rad.
s-1]
Filtrácia klzavým priemerom N = 15
mean = 9.7529var = 2.9643
mean = 9.7393var = 0.4903

Marek Šuplata
26

Marek Šuplata
27
Year’s project – Discrete event system modeling in Stateflow
Project description: DEDS model of production line
Description: my year’s project has been focused on gaining some basic skills in the field of modeling of discrete event driven systems with Stateflow.