Embed Size (px)
Citation preview
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 1/102
MANUAL DE PROGRAMACIÓNDYNA 4M
MANUALDE
PROGRAMACIÓN
CONTROL
- 1 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 2/102
MANUAL DE PROGRAMACIÓNDYNA 4M
DYNA 4M
DYNA 4M ...................................................................................................................... 2
ESPECIFICACIONES DEL CONTROL ................................................................................ 5
PROCESADOR DE 32 BIT ............................................................................................................ 5 CARACTERÍSTICAS..................................................................................................................... 5 MODOS DE OPERACIÓN .............................................................................................................. 5 FUNCIONES DE INTERPOLACIÓN ................................................................................................. 5 FUNCIONES DE COMPENSACIÓN ................................................................................................. 5 CARACTERÍSTICAS DE PROGRAMACIÓN ..................................................................................... 5
ESTRUCTURA DEL SISTEMA ............................................................................................. 6
ESTRUCTURA DEL HARDWARE................................................................................................... 6
ESTRUCTURA DEL SOFTWARE .................................................................................................... 6 FUNCIONES DEL SISTEMA. ......................................................................................................... 7
FUNCIÓN MONITOR .............................................................................................................. 9
PÁGINA DE LA MAQUINA ......................................................................................................... 11 TRAYECTORIA ......................................................................................................................... 12 POSICIÓN ................................................................................................................................. 14 OPERACIÓN ( EN EL TABLERO DE LA PANTALLA) ..................................................................... 14 3D SOLID MODELING. (MODELADO EN SÓLIDO 3D ) .............................................................. 16 DEFINICIÓN DE LA PIEZA DE TRABAJO ...................................................................................... 17 TEACH IN ............................................................................................................................. 19 FUNCION HELP....................................................................................................................... 20
FUNCIÓN MENU .................................................................................................................... 21
FILE MANAGEMENT (ADMINISTRADOR DE ARCHIVOS) ...................................................... 22 EDITAR UN PROGRAMA............................................................................................................ 27
Lista de Comandos ............................................................................................................. 28 Procedimientos de Edición................................................................................................. 28
ESPECIFICACIÓN DE LOS PARÁMETROS DE LA HERRAMIENTA ................................................... 31 TOOL LIBRARY MANAGEMENT ................................................................................................ 31 E NTRADA DE DATOS A LOS PARÁMETROS DE LA HERRAMIENTA. .............................................. 32 DEFINICIÓN DE PARÁMETROS ................................................................................................. 33 PARAMETROS DEL MONTAJE DE LA HERRAMIENTA................................................................... 35
PARAMETER SETUP........................................................................................................... 35 STATUS................................................................................................................................. 36 EXPLICACIÓN DE LOS PARAMETROS SETUP............................................................ 37
SISTEMA DE COORDENADAS ........................................................................................... 38
SISTEMA DE COORDENADAS DE LA MAQUINA ........................................................................... 38 Desplazamiento de Las Coordenadas de trabajo............................................................... 38 COORDENADAS LOCALES............................................................................................. 38
REGLAS PARA LOS CODIGOS DYNA............................................................................. 40
- 2 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 3/102
MANUAL DE PROGRAMACIÓNDYNA 4M
REGLA GENERAL DEL SISTEMA.................................................................................... 40 DEFINICIÓN DE COMANDOS ........................................................................................ 40 G00 (G0F) .......................................................................................................................... 41 G01 Interpolación lineal .................................................................................................... 41
G02 (ARCL)........................................................................................................................ 42 G02.1 (SPLL) INTERPOLACIÓN, CORTE EN ASPIRAL............................................... 43 G04 (DWELL) .................................................................................................................... 43 G08 (ARC)......................................................................................................................... 44 G12 (Termino del ciclo CW) ............................................................................................. 44 G20 (IN) ............................................................................................................................ 45 G21 (MM)........................................................................................................................... 45 G22 (CONTORNO)............................................................................................................ 45 G23 (PKT) .......................................................................................................................... 46 G24 (RECT_PKT) .............................................................................................................. 46 G25 (CIR_PTK).................................................................................................................. 47 G26 (DIE_F) ...................................................................................................................... 48 G27 (DIE_M) .................................................................................................................... 48 G28 (CERO RETURN)...................................................................................................... 48 G34 BOLT CIRCLE (CIR_CYC)....................................................................................... 49 G37 (RECT_CYC).............................................................................................................. 49
COMPENSACIÓN DEL RADIO DE LA HERRAMIENTA ............................................... 49 G40 (OFF_COMP) ............................................................................................................ 50 G41..................................................................................................................................... 50 G42..................................................................................................................................... 50 INTERFERENCIA.............................................................................................................. 51 G43 (compensación de la longitud de la herramienta )..................................................... 51 G50 (OFF_TRAN)............................................................................................................. 51
G51 (Escala)....................................................................................................................... 52 G51.1 (MIRROR)............................................................................................................... 52 G52 (CERO_AT) ................................................................................................................ 53 G53 (COORD. 0)................................................................................................................ 53 G68 (ROTATE)................................................................................................................... 54 G73 (STEP_CYC)............................................................................................................... 54 G74 (TAP_REV)................................................................................................................. 54 G82(DRILL_P)................................................................................................................... 54 G83 (DRILL_Q) PECK DRILLING ................................................................................... 55 G85 (BORE) ...................................................................................................................... 55 G89 (BORE_S) .................................................................................................................. 55 G90 (ABS) y G91 (INC)..................................................................................................... 56
G92 (CURRENT)................................................................................................................ 56 G94 (F_MIN)..................................................................................................................... 57 G95 (F_REV)...................................................................................................................... 57 G98 y G99 (END_Z0 y END_R) ..................................................................................... 57 G98..................................................................................................................................... 57 G99..................................................................................................................................... 57 SMOOTH............................................................................................................................ 57
DEFINICIÓN DE LOS CODIGOS M.................................................................................. 58
- 3 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 4/102
MANUAL DE PROGRAMACIÓNDYNA 4M
M00 (STOP) ...................................................................................................................... 58 M01 (OPT_STOP).............................................................................................................. 58 M02 (END)......................................................................................................................... 58 M03 (SLPD_ON)................................................................................................................ 58
M04 (SLPD_REV)............................................................................................................. 58 MO5 (SPDL_REV) ............................................................................................................. 58 M08 (CLNT_ON) PRENDER EL SOLUBLE .................................................................... 58 M09 (CLNT_OFF) APAGAR EL SOLUBLE...................................................................... 59 M13-SPINDLE (FORDWAD) AND COOLANT ON......................................................... 59 M134- SPINDLE (REVERSE )AND COOLANT ON......................................................... 59 M19 (SLPD_ORNT) ........................................................................................................... 59 M22 (SYNC_OUT) ............................................................................................................. 59 M23 (SYNC_WAIT) ............................................................................................................ 59 M30 (REWIND).................................................................................................................. 60 M39 (AUTO OFF).............................................................................................................. 60 M60 (OFF) ......................................................................................................................... 60 M61 (ON) ........................................................................................................................... 60 M62 (WAIT)........................................................................................................................ 61 M70 (DNC)......................................................................................................................... 61 M71 (IF) ............................................................................................................................. 61 M72 (GOTO)..................................................................................................................... 62 M73 (REPEAT)................................................................................................................... 62 M74 (RPT_END)................................................................................................................ 62 M76 (NEW)......................................................................................................................... 62 M77 (BLOCK)................................................................................................................... 63 M78 (BK_END)................................................................................................................. 63 M79 (ERROR) .................................................................................................................... 63
M80 (SPLD_CAL) .............................................................................................................. 63 M81 (TC)............................................................................................................................ 63 M82 (TS)............................................................................................................................ 64 M84 (S_MODE) ................................................................................................................ 64 M86 (PLC_WR).................................................................................................................. 64 M87 (PUSH)...................................................................................................................... 64 M88(POP............................................................................................................................ 64 M89 (SHOW)..................................................................................................................... 65 M98 (CALL) ....................................................................................................................... 65 M99 (SUB_END)................................................................................................................ 65
DEFINICIÓN DE OTROS CODIGOS.................................................................................. 65 F (FEED)............................................................................................................................ 65
S(SPEED)........................................................................................................................... 66 MENSAJES DE ERROR Y SOLUCIONES.......................................................................... 66
- 4 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 5/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Especificaciones del ControlProcesador de 32 Bit
•
LCD de Color• Teclado de Membrana
Características
• Ejes Controlados 3 – 5• Ejes Controlados Simultáneamente 3 – 5• Identificación de Ejes X,Y,Z,U,V• Incremento Programable mínimo 0.001mm – 0.0001inch• Verificación de trayectoria de Herramienta• Rendering de Modelo Sólido
Modos de operación
• Modo Automático• Modo Manual• Modo DNC (RS-232 Interno y Externo)• Modo HandWheel
Funciones de interpolación
• Interpolación Lineal
• Interpolación Circular• Interpolación Espiral
Funciones de Compensación
• Compensación de Radio de Herramienta• Compensación de Longitud de Herramienta• Compensación de Back-lash• Compensación de paso de Ball Screw• Compensación de Ángulo XY• Compensación Térmica Electrónica
Características de Programación
• Programación de códigos G/M y DYNA o mezcla de ambos• Función Teach-in• Programación Automática• Ayuda para cálculos matemáticos
- 5 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 6/102
MANUAL DE PROGRAMACIÓNDYNA 4M
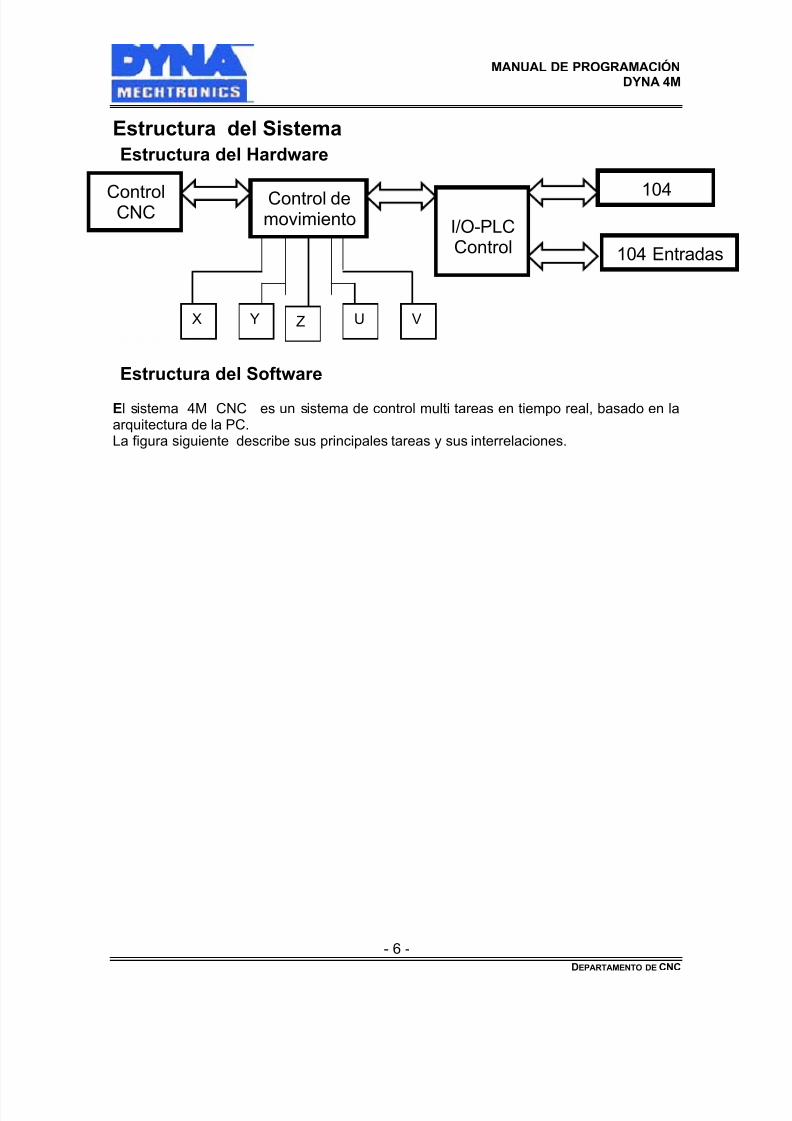
Estructura del SistemaEstructura del Hardware
Control demovimiento
I/O-PLCControl
104
VUZYX
ControlCNC
104 Entradas
Estructura del Software
El sistema 4M CNC es un sistema de control multi tareas en tiempo real, basado en laarquitectura de la PC.La figura siguiente describe sus principales tareas y sus interrelaciones.
- 6 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 7/102
MANUAL DE PROGRAMACIÓNDYNA 4M
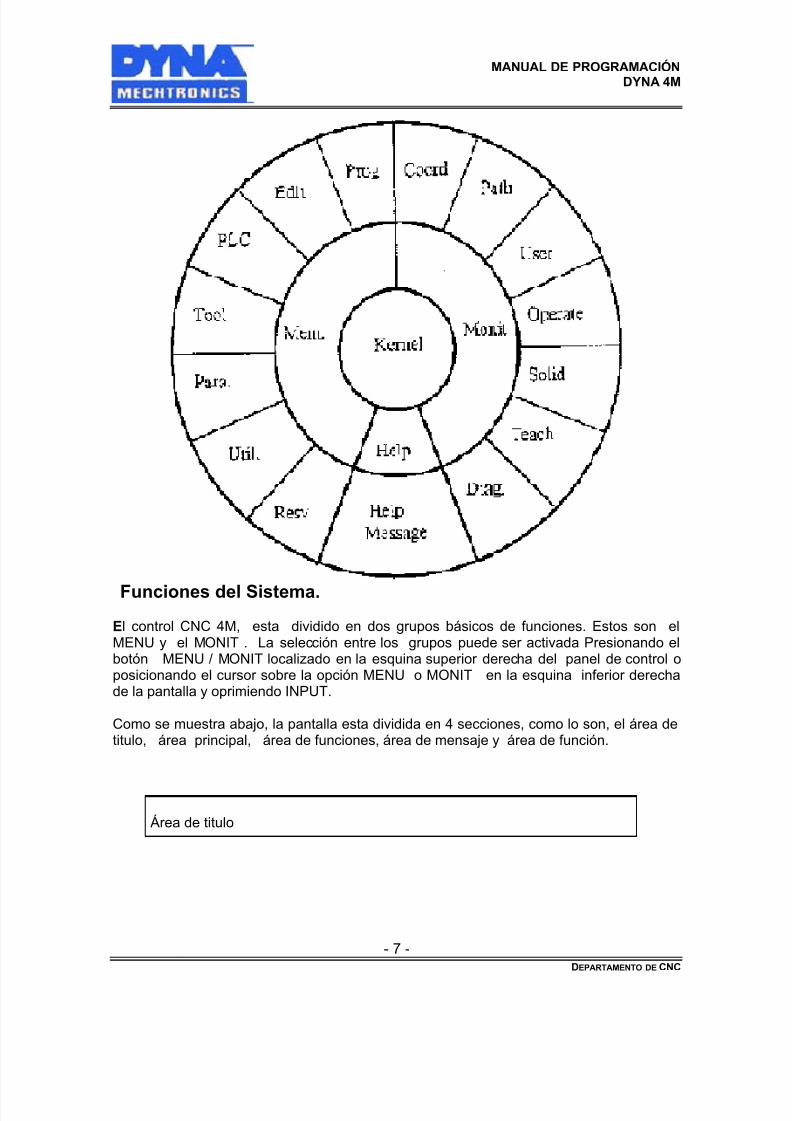
Funciones del Sistema.
El control CNC 4M, esta dividido en dos grupos básicos de funciones. Estos son elMENU y el MONIT . La selección entre los grupos puede ser activada Presionando elbotón MENU / MONIT localizado en la esquina superior derecha del panel de control oposicionando el cursor sobre la opción MENU o MONIT en la esquina inferior derechade la pantalla y oprimiendo INPUT.
Como se muestra abajo, la pantalla esta dividida en 4 secciones, como lo son, el área detitulo, área principal, área de funciones, área de mensaje y área de función.
Área de titulo
- 7 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 8/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Área principal
Área de Mensajes
Ara de Función
FuncionesEspeciales
El área de titulo muestra el nombre de la pagina vigente o nombre actual del programa
activo y el tiempo transcurrido desde que el sistema fue encendido.
El área principal muestra los datos gráficos relacionados con la operación vigente oactual. El área de mensajes proporciona mensajes de error. El área de la función deteclas muestra la posición de las teclas correspondientes.
- 8 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 9/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Función MONITOR
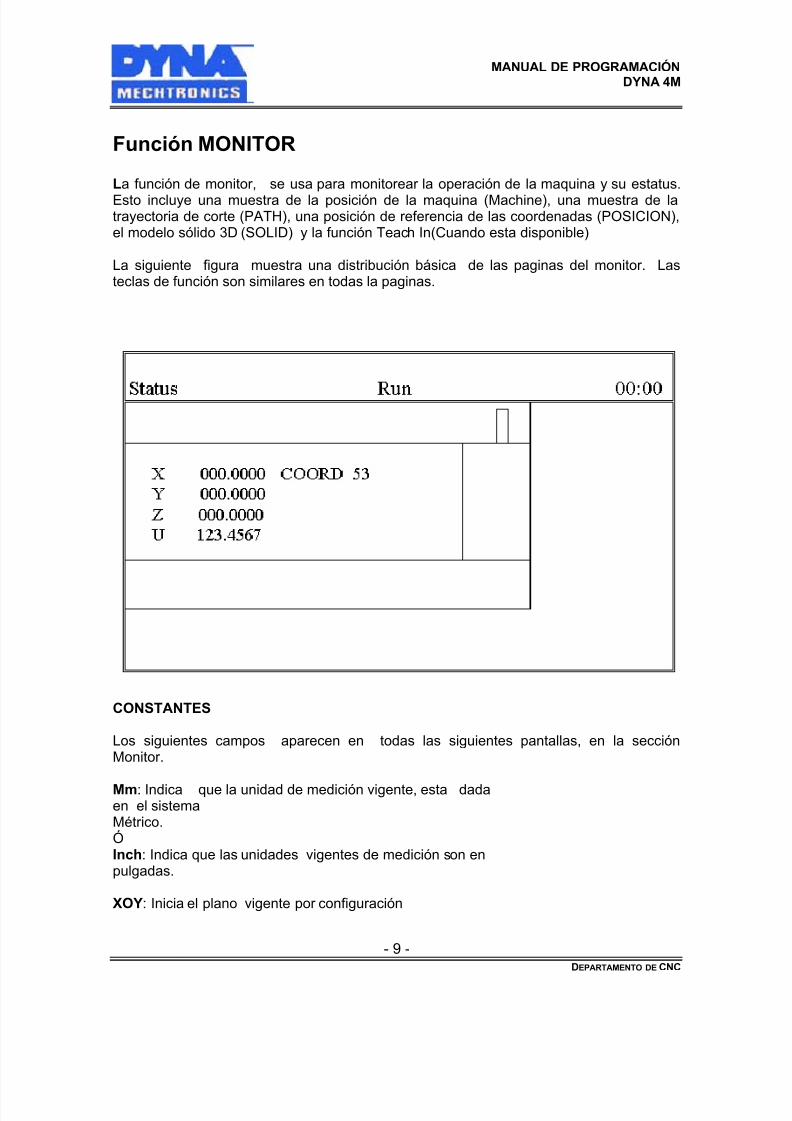
La función de monitor, se usa para monitorear la operación de la maquina y su estatus.
Esto incluye una muestra de la posición de la maquina (Machine), una muestra de latrayectoria de corte (PATH), una posición de referencia de las coordenadas (POSICION),el modelo sólido 3D (SOLID) y la función Teach In(Cuando esta disponible)
La siguiente figura muestra una distribución básica de las paginas del monitor. Lasteclas de función son similares en todas la paginas.
CONSTANTES
Los siguientes campos aparecen en todas las siguientes pantallas, en la secciónMonitor.
Mm: Indica que la unidad de medición vigente, esta dadaen el sistemaMétrico.ÓInch: Indica que las unidades vigentes de medición son enpulgadas.
XOY: Inicia el plano vigente por configuración
- 9 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 10/102
MANUAL DE PROGRAMACIÓNDYNA 4M
preestablecida debe ser XY, YZ, ZX, ó YZ.ABS: Indica el status absoluto o incremental
Sx: Muestra el porcentaje de sobre marcha programada en la
velocidad del HusilloFx : Indica el porcentaje de sobre marcha en laalimentación programada
Rx : Indica el porcentaje de sobre marcha en el incrementorápidoprogramado.
Jx: Indica la longitud de paso cuando el modo JOG. Esseleccionado..
Hx: Indica la longitud de recorrido pro pulso de control0remoto manual.
F: Muestra los datos de velocidad de corte.
T: Indica el numero de herramienta actual.
S: Indica la velocidad angular actual del Husillo.
Los siguientes botones aparecen ala derecha de la pantalla. Se seleccionan moviendo elcursor iluminando la selección y oprimiendo la tecla INPUT.
Search: Localiza una línea particular al programa (Si no se usa al iniciar un programadesde el principio).
Reset: Reiniciara la operación actual y regresara al programa actual a su inicio. Estetiene la misma función que el botón Reset en el panel de control.
Run: Iniciara una operación. Tiene la función que el botón de Cycle Start
Hold: Detendrá la ejecución del programa. Tiene la mismafunción que el botón Feed Hold.
Simu: Selecciona la función de simulación.
MDI: Manual DATA INPUT permite la entrada de comandos NC.Para su ejecución.
Help: Permite el acceso a la sección de ayuda.
Position: Muestra la posición actual de coordenadasrelativas al cero local vigente.
- 10 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 11/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Machine: Muestra la posición actual de coordenadas relativasal cero de la maquina (Home).Tool Para: Muestra el estado vigente de la compensación dela herramienta.
Z: Es la longitud desplazada de la herramienta vigente
D: Es el diámetro de la herramienta actual.
Página de la Maquina
La pagina de coordenadas de la Maquina, es la pagina preestablecida de las funcionesdel monitor. La posición actual de la maquina con relación a la posición cero de lamaquina, mostrada con un gran numero de caracteres.Otra información se muestra a la derecha de la pantalla de coordenadas , como sedescribe a continuación.
COORD.Muestra el numero de coordenadas de trabajo actual(G54-G59) y los valores actuales delas coordenadas desplazadas.
Nota: G54 puede también usado como cero de maquina.
DST-TO-GOMuestra la diferencia entre la posición actual y el destino de la posición actual delcomando
COMAND:
Muestra la posición comandada por el actual programa NC.
- 11 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 12/102
MANUAL DE PROGRAMACIÓNDYNA 4M
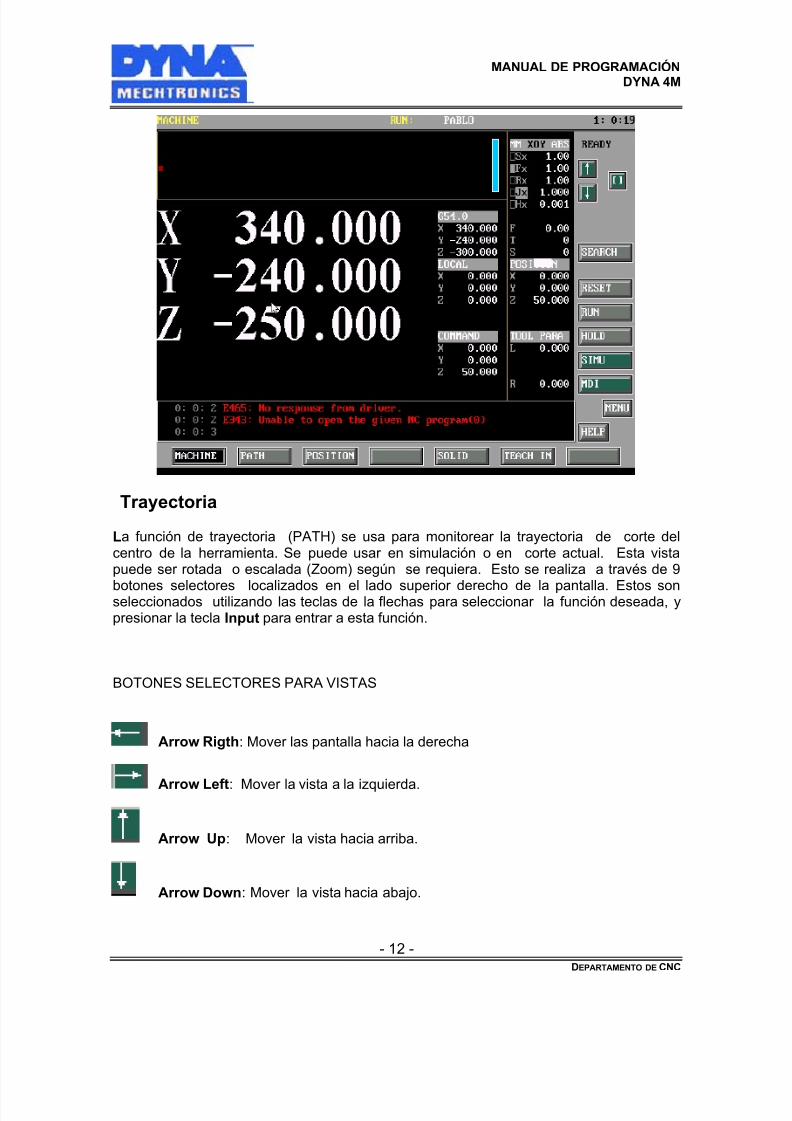
Trayectoria
La función de trayectoria (PATH) se usa para monitorear la trayectoria de corte delcentro de la herramienta. Se puede usar en simulación o en corte actual. Esta vistapuede ser rotada o escalada (Zoom) según se requiera. Esto se realiza a través de 9
botones selectores localizados en el lado superior derecho de la pantalla. Estos sonseleccionados utilizando las teclas de la flechas para seleccionar la función deseada, ypresionar la tecla Input para entrar a esta función.
BOTONES SELECTORES PARA VISTAS
Arrow Rigth: Mover las pantalla hacia la derecha
Arrow Left: Mover la vista a la izquierda.
Arrow Up: Mover la vista hacia arriba.
Arrow Down: Mover la vista hacia abajo.
- 12 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 13/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Large Circle y
Small Dot: Con estas podemos acercar o alejar el plano de trabajo.
V+ δ V- : Nos permiten ver todas las vistas de la pieza, frontal, horizontal,isométrica, etc.
Las diferentes secciones aparecen en el área principal. Si un color de pantalla es usado,podrán ser mostrados en diferentes colores. Si el monocromo de la pantalla es usado,estos pueden ser distinguidos por la forma. La descripción es la siguiente.
Red Dash Rectangular Frame : (Área delimitada por una caja rectangular roja)
Va a toda velocidad el limite del rango del software con el movimiento máximo y mínimodel rango uniforme de los ejes. El limite del ángulo es colocado en el montaje de lamaquina del parámetro del sistema .
Yellow Dash Rectangular Frame: (Área delimitada por una caja rectangular amarilla)En este se da la forma y el tamaño de las piezas de trabajo. Este tamaño colocado en lasegunda pagina de parámetro
Yellow Solid Rectangular Mark: (Marca amarilla del sólido rectangular)Denota el cero actual de la maquina.
Triangular Mark: (Marca triangular)
Denota la posición actual de la herramienta dando las coordenadas posición actual . estoda una indicación si la visión es XY, XZ, YZ ó una visión del Isométrico.La exhibición de la longitud de la regla de la pantalla.
- 13 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 14/102
MANUAL DE PROGRAMACIÓNDYNA 4M
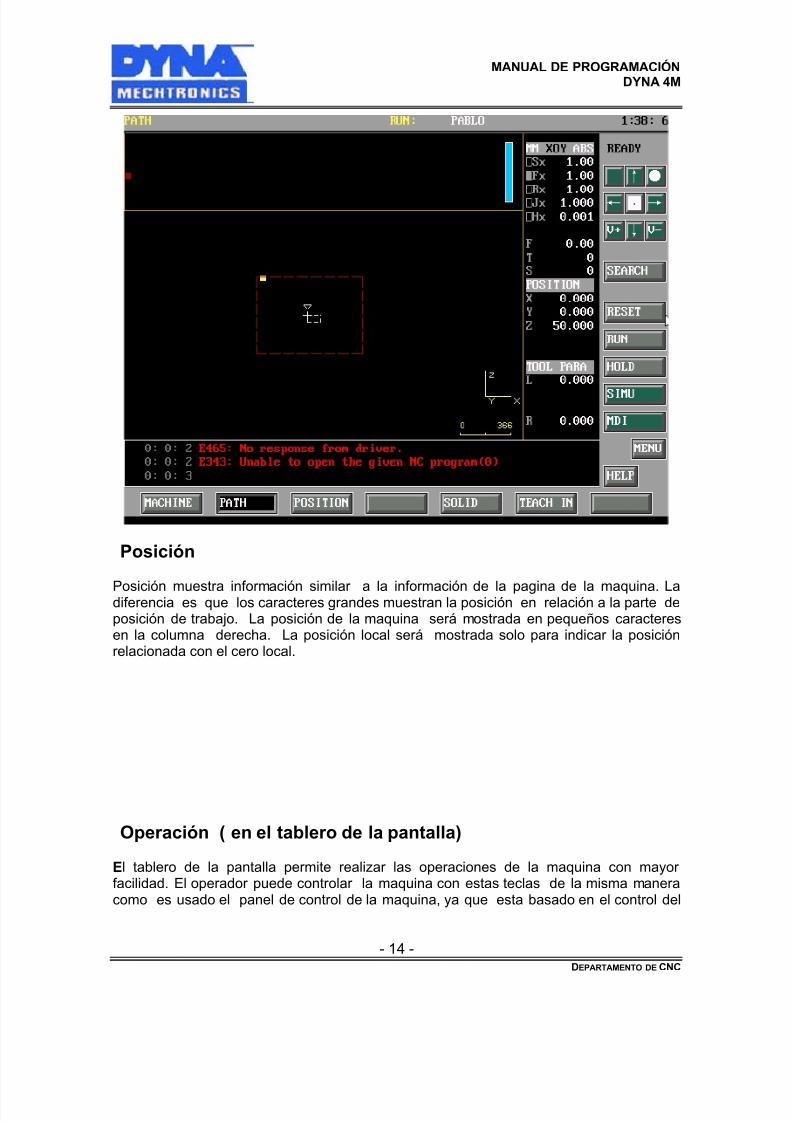
Posición
Posición muestra información similar a la información de la pagina de la maquina. Ladiferencia es que los caracteres grandes muestran la posición en relación a la parte deposición de trabajo. La posición de la maquina será mostrada en pequeños caracteresen la columna derecha. La posición local será mostrada solo para indicar la posiciónrelacionada con el cero local.
Operación ( en el tablero de la pantalla)
El tablero de la pantalla permite realizar las operaciones de la maquina con mayorfacilidad. El operador puede controlar la maquina con estas teclas de la misma maneracomo es usado el panel de control de la maquina, ya que esta basado en el control del
- 14 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 15/102
MANUAL DE PROGRAMACIÓNDYNA 4M
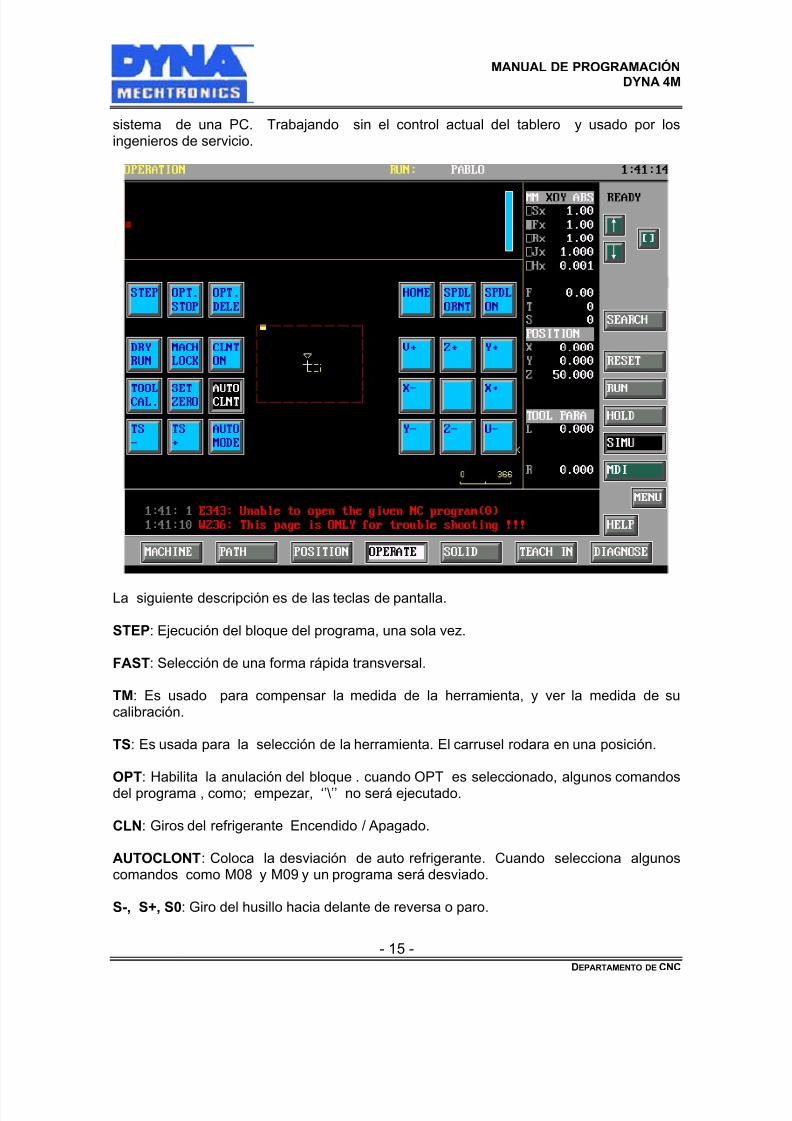
sistema de una PC. Trabajando sin el control actual del tablero y usado por losingenieros de servicio.
La siguiente descripción es de las teclas de pantalla.
STEP: Ejecución del bloque del programa, una sola vez.
FAST: Selección de una forma rápida transversal.
TM: Es usado para compensar la medida de la herramienta, y ver la medida de sucalibración.
TS: Es usada para la selección de la herramienta. El carrusel rodara en una posición.
OPT: Habilita la anulación del bloque . cuando OPT es seleccionado, algunos comandosdel programa , como; empezar, ‘’\’’ no será ejecutado.
CLN: Giros del refrigerante Encendido / Apagado.
AUTOCLONT: Coloca la desviación de auto refrigerante. Cuando selecciona algunoscomandos como M08 y M09 y un programa será desviado.
S-, S+, S0: Giro del husillo hacia delante de reversa o paro.
- 15 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 16/102
MANUAL DE PROGRAMACIÓNDYNA 4M
ORNT: Orientara la alineación del husillo con el cambio de la herramienta en el carrusel.
HOME : Retorno dela maquina a la posición de cero maquina.
X+: Mover el eje X en dirección positiva.X-: Mover el eje X en dirección negativa.Y+: Mover el eje Y en dirección positiva,Z+: Mover el eje Z en dirección positiva.Z-: Mover el eje Z en dirección negativa.0 : Colocara el punto cero de forma local (Ver la
operación de la maquina.)
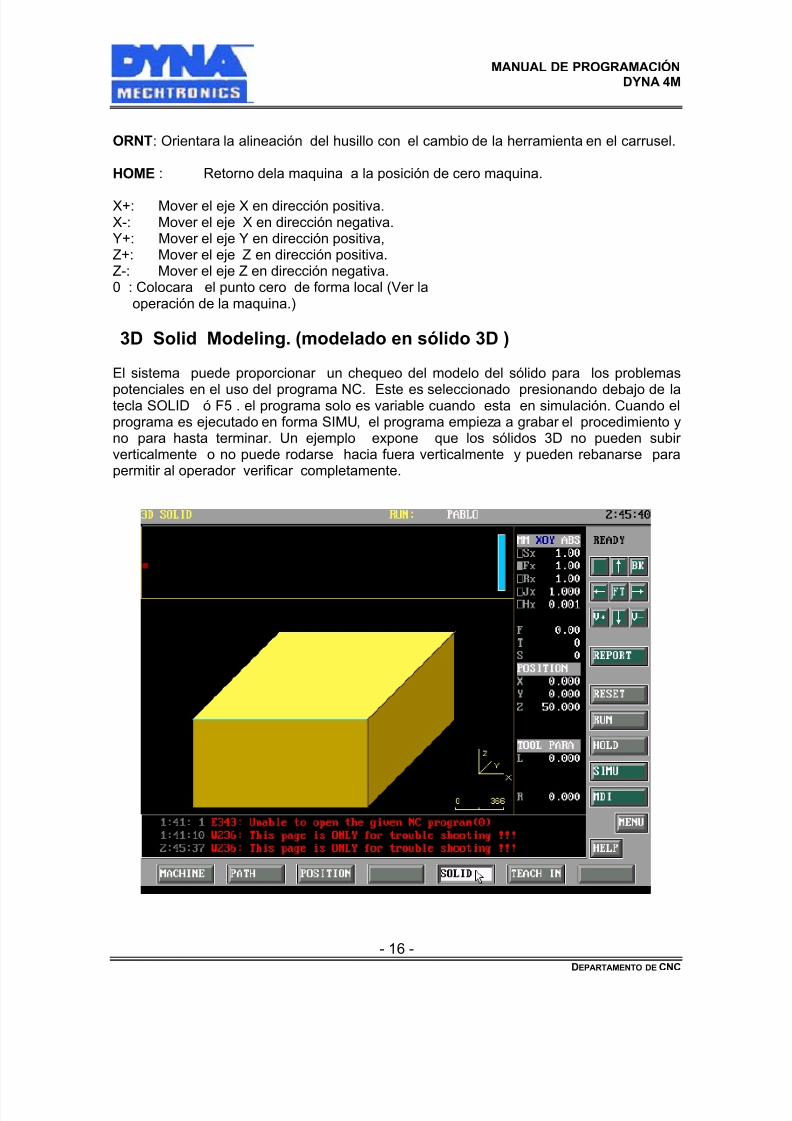
3D Solid Modeling. (modelado en sólido 3D )
El sistema puede proporcionar un chequeo del modelo del sólido para los problemas
potenciales en el uso del programa NC. Este es seleccionado presionando debajo de latecla SOLID ó F5 . el programa solo es variable cuando esta en simulación. Cuando elprograma es ejecutado en forma SIMU, el programa empieza a grabar el procedimiento yno para hasta terminar. Un ejemplo expone que los sólidos 3D no pueden subirverticalmente o no puede rodarse hacia fuera verticalmente y pueden rebanarse parapermitir al operador verificar completamente.
- 16 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 17/102
MANUAL DE PROGRAMACIÓNDYNA 4M
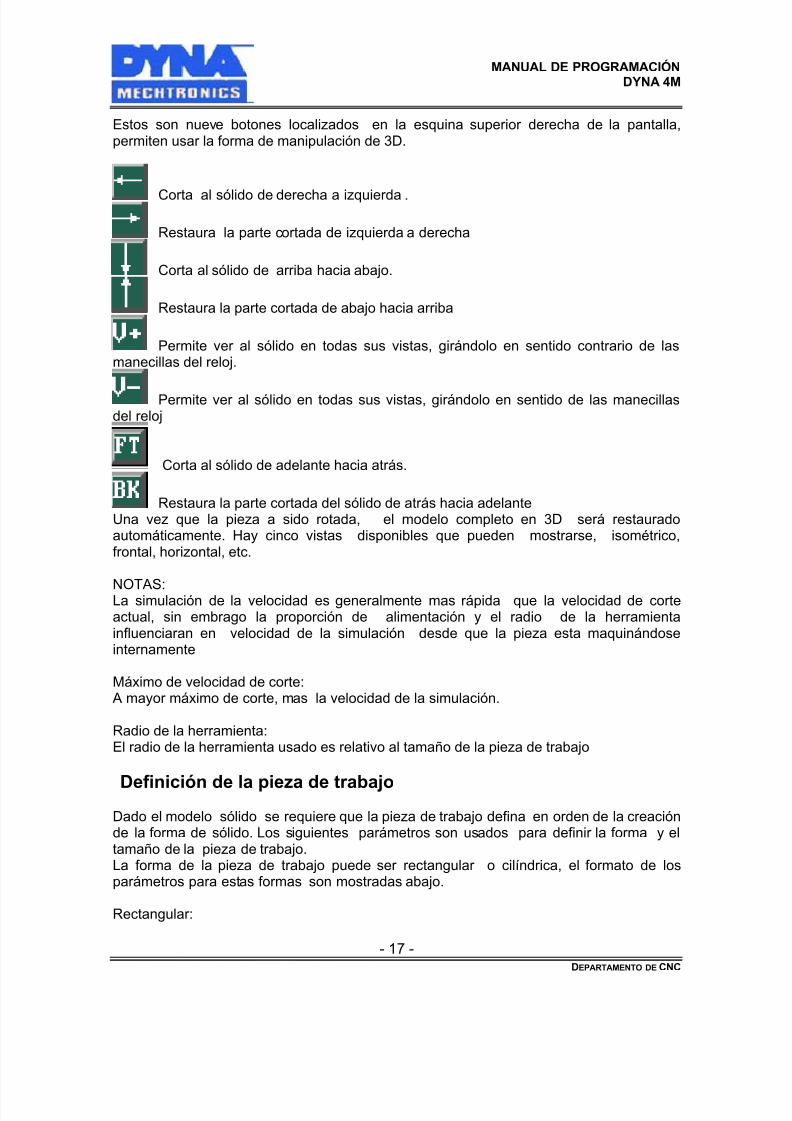
Estos son nueve botones localizados en la esquina superior derecha de la pantalla,permiten usar la forma de manipulación de 3D.
Corta al sólido de derecha a izquierda .
Restaura la parte cortada de izquierda a derecha
Corta al sólido de arriba hacia abajo.
Restaura la parte cortada de abajo hacia arriba
Permite ver al sólido en todas sus vistas, girándolo en sentido contrario de lasmanecillas del reloj.
Permite ver al sólido en todas sus vistas, girándolo en sentido de las manecillasdel reloj
Corta al sólido de adelante hacia atrás.
Restaura la parte cortada del sólido de atrás hacia adelanteUna vez que la pieza a sido rotada, el modelo completo en 3D será restauradoautomáticamente. Hay cinco vistas disponibles que pueden mostrarse, isométrico,frontal, horizontal, etc.
NOTAS:La simulación de la velocidad es generalmente mas rápida que la velocidad de corteactual, sin embrago la proporción de alimentación y el radio de la herramientainfluenciaran en velocidad de la simulación desde que la pieza esta maquinándoseinternamente
Máximo de velocidad de corte: A mayor máximo de corte, mas la velocidad de la simulación.
Radio de la herramienta:El radio de la herramienta usado es relativo al tamaño de la pieza de trabajo
Definición de la pieza de trabajoDado el modelo sólido se requiere que la pieza de trabajo defina en orden de la creaciónde la forma de sólido. Los siguientes parámetros son usados para definir la forma y eltamaño de la pieza de trabajo.La forma de la pieza de trabajo puede ser rectangular o cilíndrica, el formato de losparámetros para estas formas son mostradas abajo.
Rectangular:
- 17 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 18/102
MANUAL DE PROGRAMACIÓNDYNA 4M
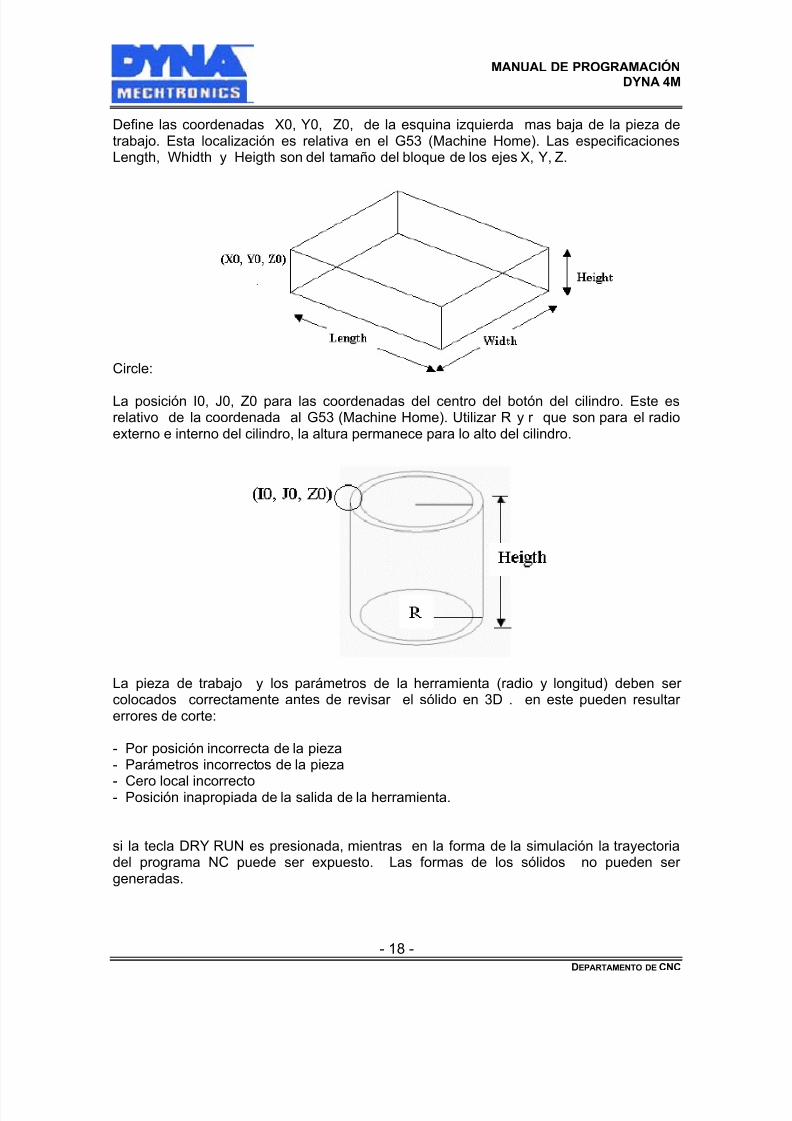
Define las coordenadas X0, Y0, Z0, de la esquina izquierda mas baja de la pieza detrabajo. Esta localización es relativa en el G53 (Machine Home). Las especificacionesLength, Whidth y Heigth son del tamaño del bloque de los ejes X, Y, Z.
Circle:
La posición I0, J0, Z0 para las coordenadas del centro del botón del cilindro. Este esrelativo de la coordenada al G53 (Machine Home). Utilizar R y r que son para el radioexterno e interno del cilindro, la altura permanece para lo alto del cilindro.
La pieza de trabajo y los parámetros de la herramienta (radio y longitud) deben sercolocados correctamente antes de revisar el sólido en 3D . en este pueden resultarerrores de corte:
- Por posición incorrecta de la pieza- Parámetros incorrectos de la pieza
- Cero local incorrecto- Posición inapropiada de la salida de la herramienta.
si la tecla DRY RUN es presionada, mientras en la forma de la simulación la trayectoriadel programa NC puede ser expuesto. Las formas de los sólidos no pueden sergeneradas.
- 18 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 19/102
MANUAL DE PROGRAMACIÓNDYNA 4M
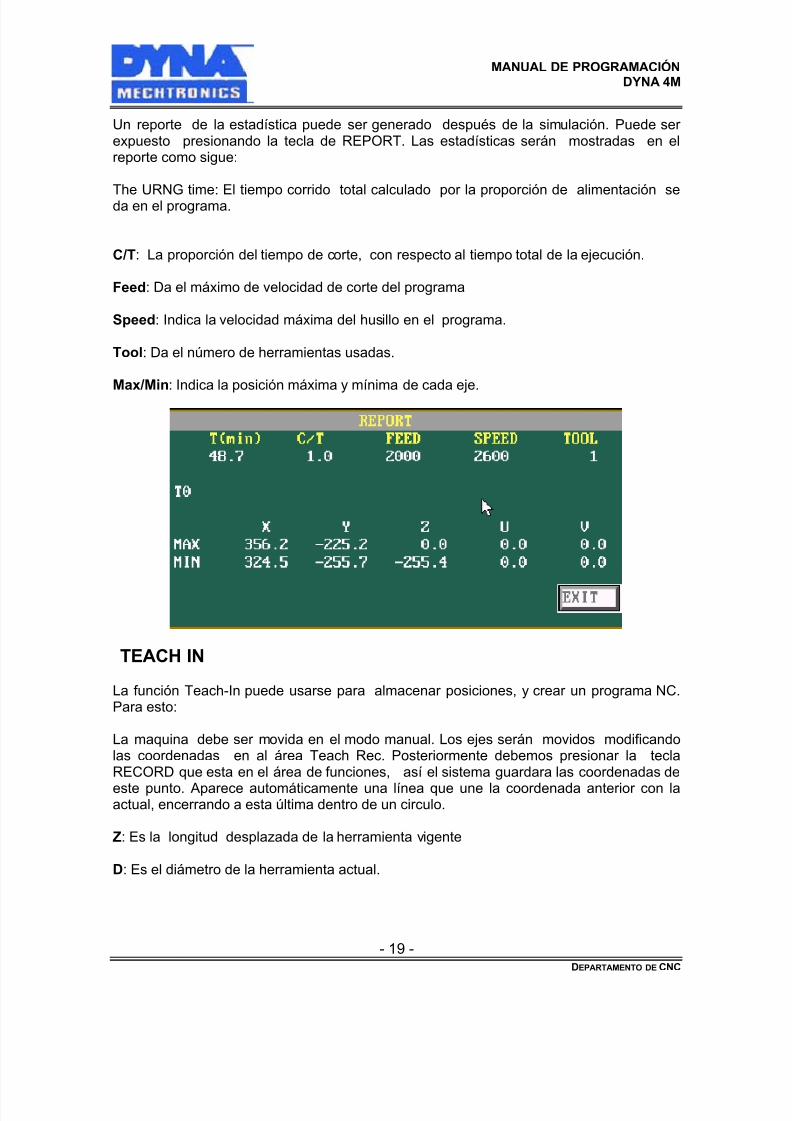
Un reporte de la estadística puede ser generado después de la simulación. Puede serexpuesto presionando la tecla de REPORT. Las estadísticas serán mostradas en elreporte como sigue:
The URNG time: El tiempo corrido total calculado por la proporción de alimentación seda en el programa.
C/T: La proporción del tiempo de corte, con respecto al tiempo total de la ejecución.
Feed: Da el máximo de velocidad de corte del programa
Speed: Indica la velocidad máxima del husillo en el programa.
Tool: Da el número de herramientas usadas.
Max/Min: Indica la posición máxima y mínima de cada eje.
TEACH IN
La función Teach-In puede usarse para almacenar posiciones, y crear un programa NC.Para esto:
La maquina debe ser movida en el modo manual. Los ejes serán movidos modificandolas coordenadas en al área Teach Rec. Posteriormente debemos presionar la teclaRECORD que esta en el área de funciones, así el sistema guardara las coordenadas de
este punto. Aparece automáticamente una línea que une la coordenada anterior con laactual, encerrando a esta última dentro de un circulo.
Z: Es la longitud desplazada de la herramienta vigente
D: Es el diámetro de la herramienta actual.
- 19 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 20/102
MANUAL DE PROGRAMACIÓNDYNA 4M
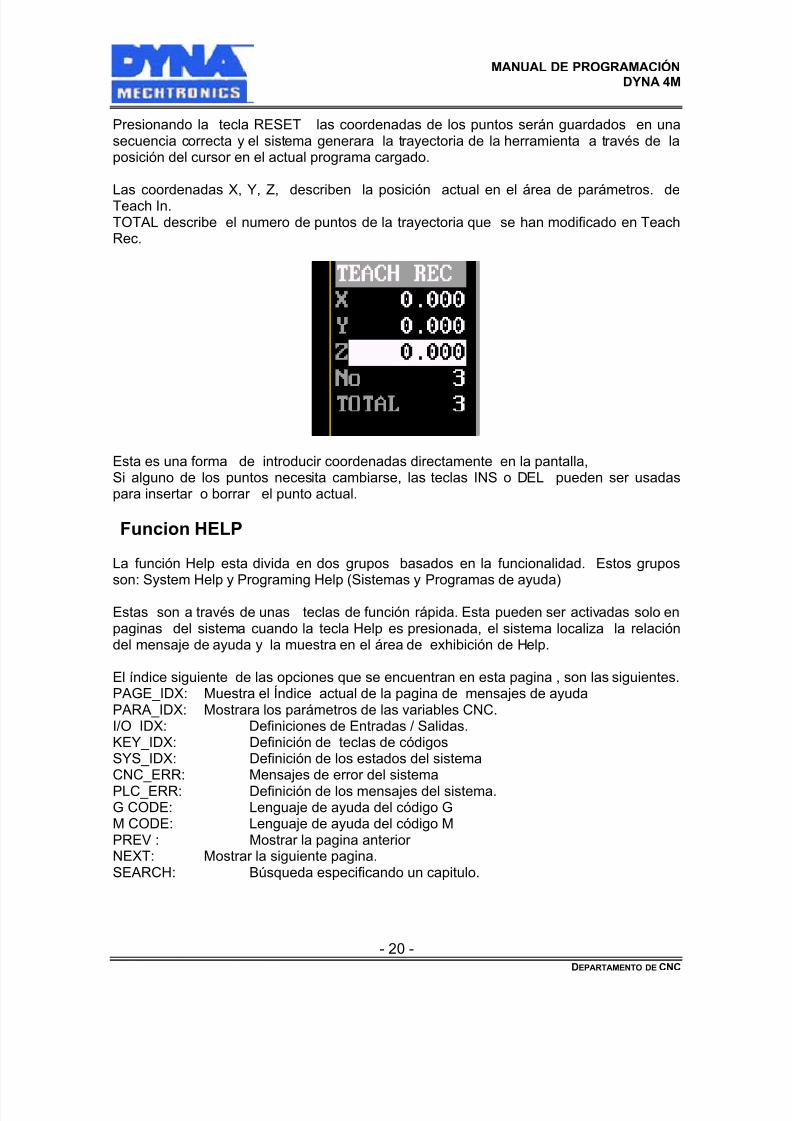
Presionando la tecla RESET las coordenadas de los puntos serán guardados en unasecuencia correcta y el sistema generara la trayectoria de la herramienta a través de laposición del cursor en el actual programa cargado.
Las coordenadas X, Y, Z, describen la posición actual en el área de parámetros. deTeach In.TOTAL describe el numero de puntos de la trayectoria que se han modificado en TeachRec.
Esta es una forma de introducir coordenadas directamente en la pantalla,Si alguno de los puntos necesita cambiarse, las teclas INS o DEL pueden ser usadaspara insertar o borrar el punto actual.
Funcion HELP
La función Help esta divida en dos grupos basados en la funcionalidad. Estos gruposson: System Help y Programing Help (Sistemas y Programas de ayuda)
Estas son a través de unas teclas de función rápida. Esta pueden ser activadas solo enpaginas del sistema cuando la tecla Help es presionada, el sistema localiza la relacióndel mensaje de ayuda y la muestra en el área de exhibición de Help.
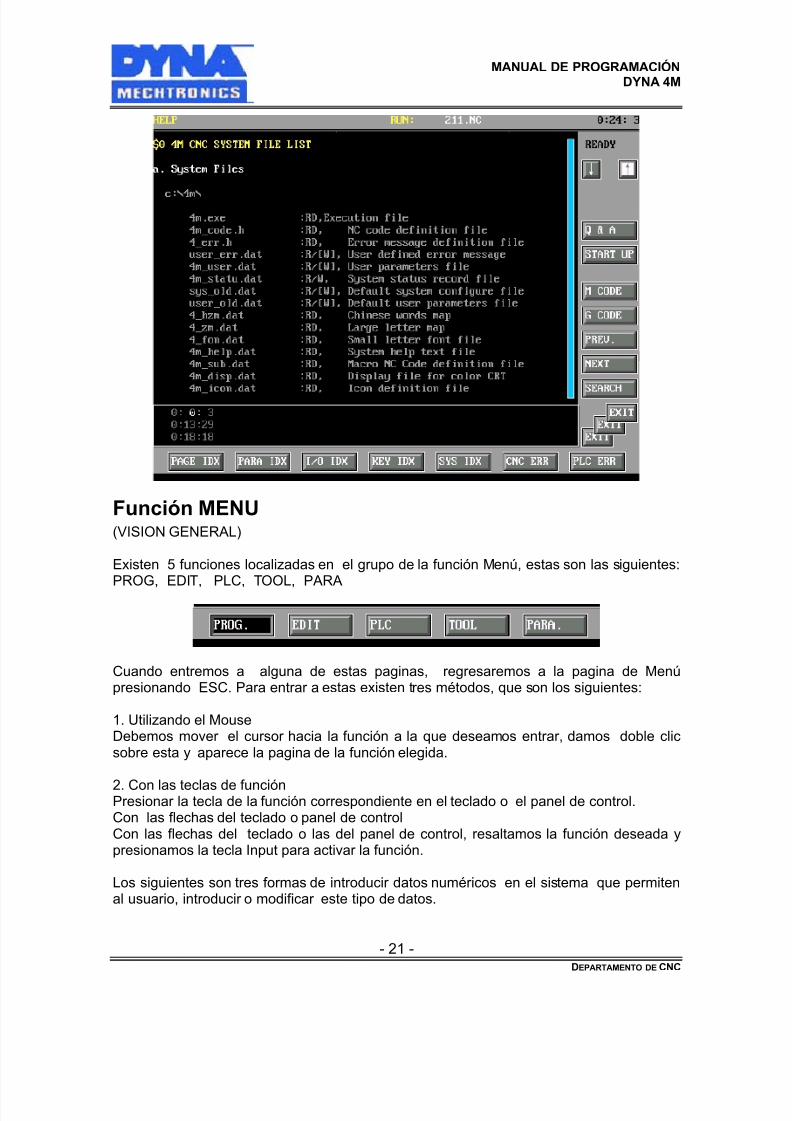
El índice siguiente de las opciones que se encuentran en esta pagina , son las siguientes.PAGE_IDX: Muestra el Índice actual de la pagina de mensajes de ayudaPARA_IDX: Mostrara los parámetros de las variables CNC.I/O IDX: Definiciones de Entradas / Salidas.KEY_IDX: Definición de teclas de códigosSYS_IDX: Definición de los estados del sistemaCNC_ERR: Mensajes de error del sistemaPLC_ERR: Definición de los mensajes del sistema.G CODE: Lenguaje de ayuda del código GM CODE: Lenguaje de ayuda del código MPREV : Mostrar la pagina anteriorNEXT: Mostrar la siguiente pagina.SEARCH: Búsqueda especificando un capitulo.
- 20 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 21/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Función MENU(VISION GENERAL)
Existen 5 funciones localizadas en el grupo de la función Menú, estas son las siguientes:PROG, EDIT, PLC, TOOL, PARA
Cuando entremos a alguna de estas paginas, regresaremos a la pagina de Menúpresionando ESC. Para entrar a estas existen tres métodos, que son los siguientes:
1. Utilizando el MouseDebemos mover el cursor hacia la función a la que deseamos entrar, damos doble clicsobre esta y aparece la pagina de la función elegida.
2. Con las teclas de funciónPresionar la tecla de la función correspondiente en el teclado o el panel de control.Con las flechas del teclado o panel de controlCon las flechas del teclado o las del panel de control, resaltamos la función deseada ypresionamos la tecla Input para activar la función.
Los siguientes son tres formas de introducir datos numéricos en el sistema que permitenal usuario, introducir o modificar este tipo de datos.
- 21 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 22/102
MANUAL DE PROGRAMACIÓNDYNA 4M
1. Pagina de entrada de datos numéricosEste tipo de datos introducidos en las ventanas son usados para la integración de unaunidad. Usando las teclas de las flechas para mover el cursor (o moviendo el mouse)hasta los datos a modificar, cambiamos este valor y presionamos la tecla Input.
El valor original permanecerá inalterado si no presiona la tecla Input después, estatiene la función de hacer valido este cambio.
2. Pagina de entrada de datos PRE-SETEsta nos permite la selección de un conjunto de datos del tipo Pre-Set. Use las teclas delas flechas o el mouse para localizar los datos a cambiar, modifíquelo y presione latecla Input para cambiar los datos asta que aparezcan los datos deseados.
3. Pagina de entrada de datos ON/OFFEste tipo de datos son usados en el conjunto para activar estado Encendido / apagadoen la función especifica. Solo Encendido y Apagado pueden ser seleccionados.Presionando la tecla Input, cambiara de encendido a apagado o de apagado aencendido, activara y desactivara la función seleccionada según las necesidades delusuario.
FILE MANAGEMENT (administrador de archivos)
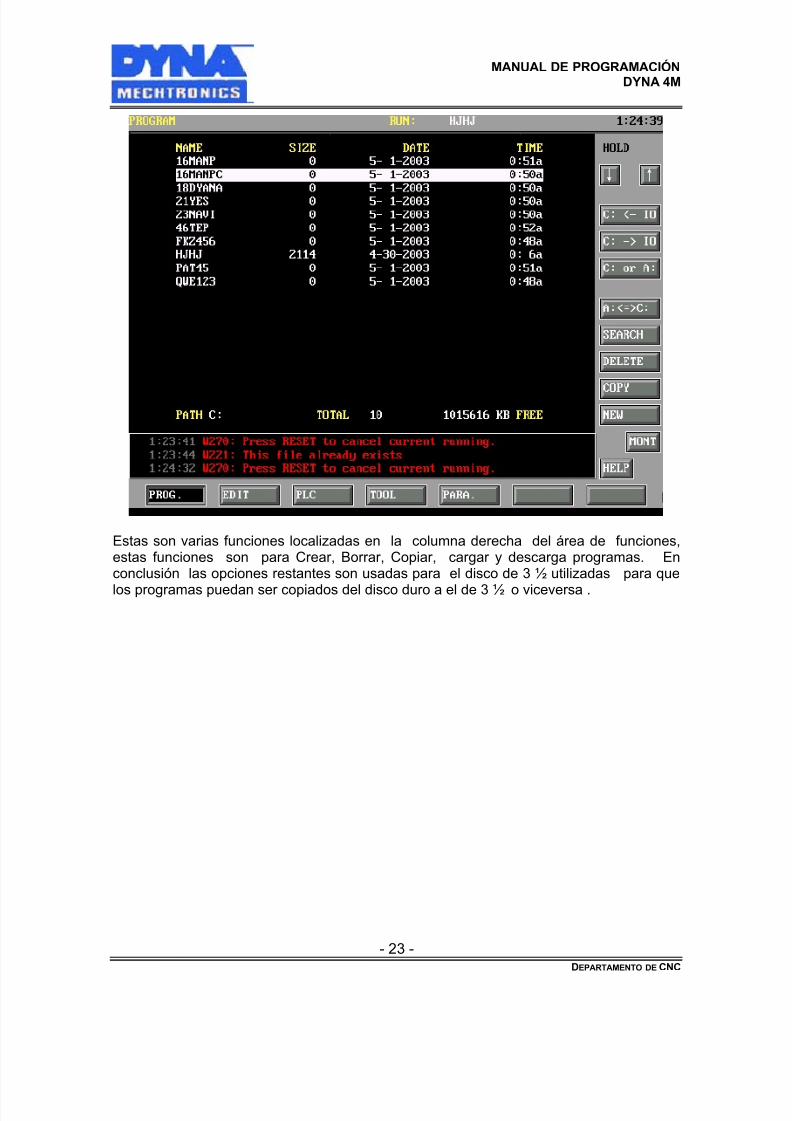
La pagina de dirección de archivos, contiene en la memoria información de losprogramas actuales NC, en los cuales incluye; el nombre, tamaño, datos y la fecha en
el que el archivo fue creado. La información del disco es desplegada. Pueden habervarias paginas con nombres que contengan los nombres de los archivos de los programasexistentes en la memoria. Cuando el numero de programas excede la capacidad de lapagina, deben utilizarse las teclas PG UP o PG DN, para cambiar o agregar maspaginas.
La teclas de las flechas se usan para subir y bajar la barra que subraya los programasen la pantalla. Para lograr cargar un programa y poder correrlo debemos hacer losiguiente:
Seleccionar el programa que deseamos, subrayándola con la barra selectora de lapantalla Presionar la tecla Input o dar doble click con el botón izquierdo del mouse. El
nombre de las filas aparecerá en el campo de RUN que esta el el area de titulo. La filaes cargada para activarla en la memoria (y hacer que el programa inicie)
- 22 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 23/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Estas son varias funciones localizadas en la columna derecha del área de funciones,estas funciones son para Crear, Borrar, Copiar, cargar y descarga programas. Enconclusión las opciones restantes son usadas para el disco de 3 ½ utilizadas para que
los programas puedan ser copiados del disco duro a el de 3 ½ o viceversa .
- 23 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 24/102
MANUAL DE PROGRAMACIÓNDYNA 4M
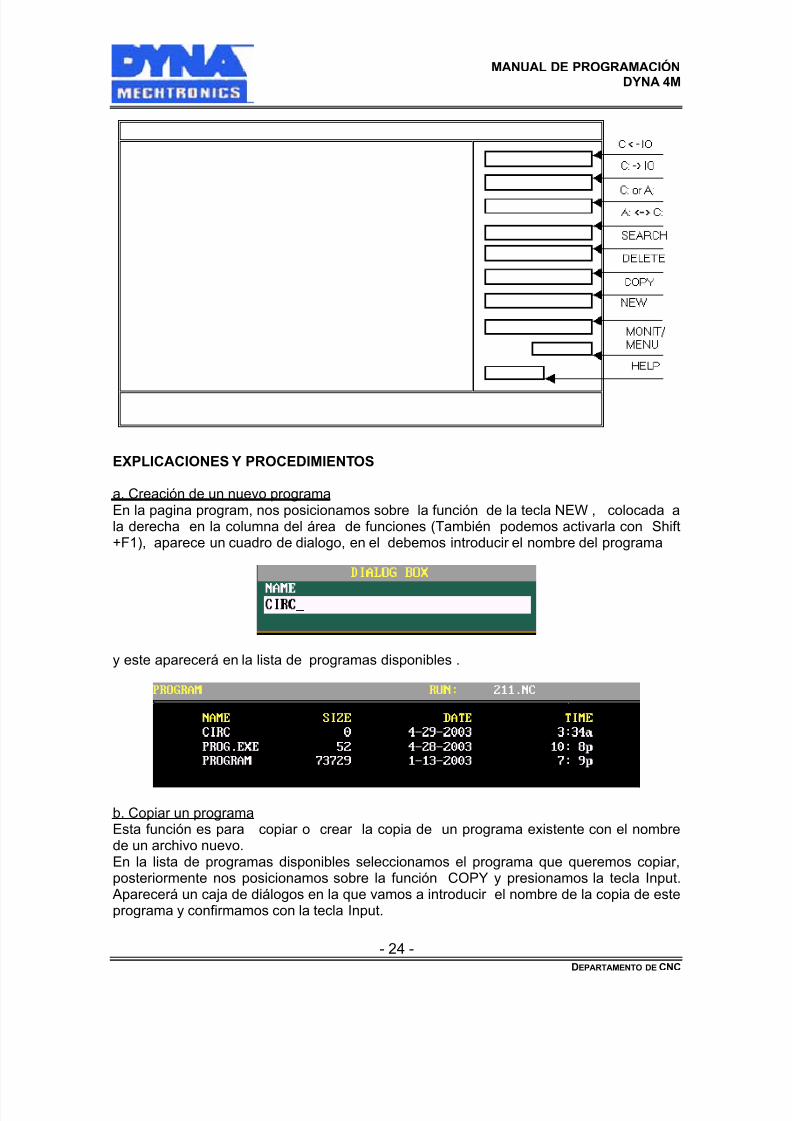
EXPLICACIONES Y PROCEDIMIENTOS
a. Creación de un nuevo programaEn la pagina program, nos posicionamos sobre la función de la tecla NEW , colocada ala derecha en la columna del área de funciones (También podemos activarla con Shift+F1), aparece un cuadro de dialogo, en el debemos introducir el nombre del programa
y este aparecerá en la lista de programas disponibles .
b. Copiar un programaEsta función es para copiar o crear la copia de un programa existente con el nombrede un archivo nuevo.En la lista de programas disponibles seleccionamos el programa que queremos copiar,posteriormente nos posicionamos sobre la función COPY y presionamos la tecla Input.
Aparecerá un caja de diálogos en la que vamos a introducir el nombre de la copia de esteprograma y confirmamos con la tecla Input.
- 24 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 25/102
MANUAL DE PROGRAMACIÓNDYNA 4M
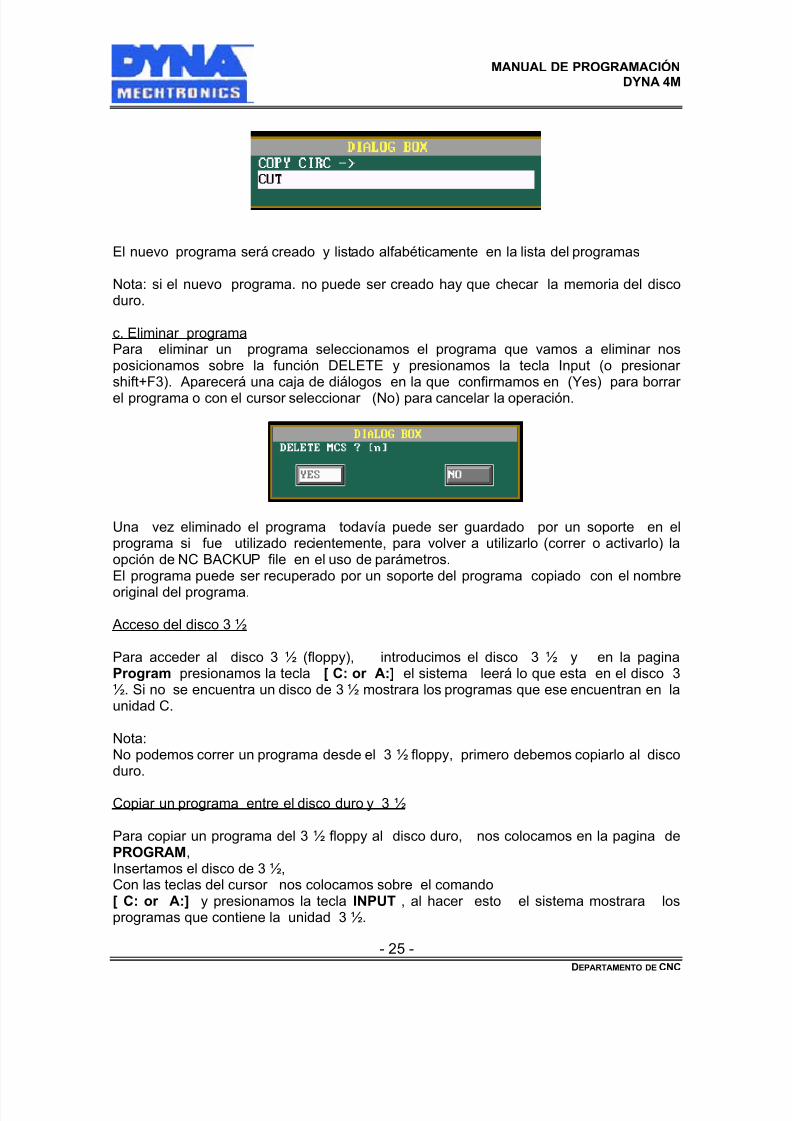
El nuevo programa será creado y listado alfabéticamente en la lista del programas
Nota: si el nuevo programa. no puede ser creado hay que checar la memoria del discoduro.
c. Eliminar programaPara eliminar un programa seleccionamos el programa que vamos a eliminar nosposicionamos sobre la función DELETE y presionamos la tecla Input (o presionarshift+F3). Aparecerá una caja de diálogos en la que confirmamos en (Yes) para borrarel programa o con el cursor seleccionar (No) para cancelar la operación.
Una vez eliminado el programa todavía puede ser guardado por un soporte en elprograma si fue utilizado recientemente, para volver a utilizarlo (correr o activarlo) laopción de NC BACKUP file en el uso de parámetros.El programa puede ser recuperado por un soporte del programa copiado con el nombre
original del programa.
Acceso del disco 3 ½
Para acceder al disco 3 ½ (floppy), introducimos el disco 3 ½ y en la paginaProgram presionamos la tecla [ C: or A:] el sistema leerá lo que esta en el disco 3½. Si no se encuentra un disco de 3 ½ mostrara los programas que ese encuentran en launidad C.
Nota:No podemos correr un programa desde el 3 ½ floppy, primero debemos copiarlo al discoduro.
Copiar un programa entre el disco duro y 3 ½
Para copiar un programa del 3 ½ floppy al disco duro, nos colocamos en la pagina dePROGRAM,Insertamos el disco de 3 ½,Con las teclas del cursor nos colocamos sobre el comando[ C: or A:] y presionamos la tecla INPUT , al hacer esto el sistema mostrara losprogramas que contiene la unidad 3 ½.
- 25 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 26/102
MANUAL DE PROGRAMACIÓNDYNA 4M
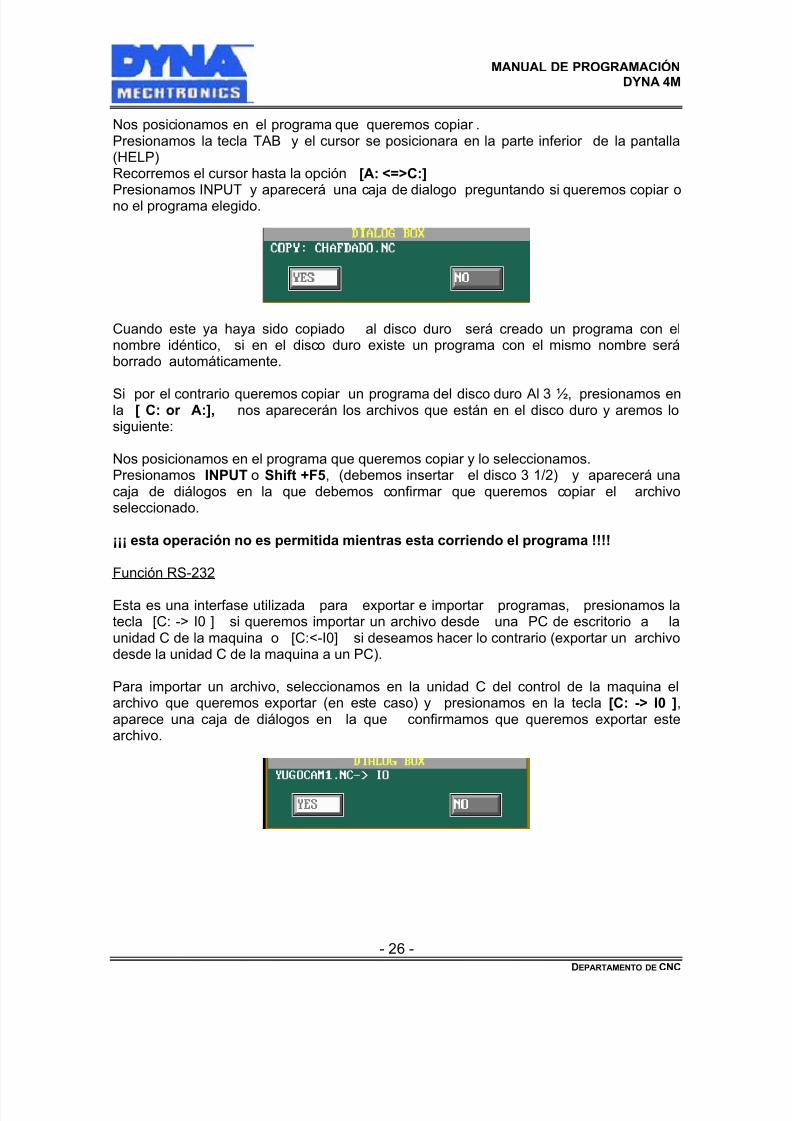
Nos posicionamos en el programa que queremos copiar .Presionamos la tecla TAB y el cursor se posicionara en la parte inferior de la pantalla(HELP)Recorremos el cursor hasta la opción [A: <=>C:]
Presionamos INPUT y aparecerá una caja de dialogo preguntando si queremos copiar ono el programa elegido.
Cuando este ya haya sido copiado al disco duro será creado un programa con elnombre idéntico, si en el disco duro existe un programa con el mismo nombre seráborrado automáticamente.
Si por el contrario queremos copiar un programa del disco duro Al 3 ½, presionamos enla [ C: or A:], nos aparecerán los archivos que están en el disco duro y aremos losiguiente:
Nos posicionamos en el programa que queremos copiar y lo seleccionamos.Presionamos INPUT o Shift +F5, (debemos insertar el disco 3 1/2) y aparecerá unacaja de diálogos en la que debemos confirmar que queremos copiar el archivoseleccionado.
¡¡¡ esta operación no es permitida mientras esta corriendo el programa !!!!
Función RS-232
Esta es una interfase utilizada para exportar e importar programas, presionamos latecla [C: -> I0 ] si queremos importar un archivo desde una PC de escritorio a launidad C de la maquina o [C:<-I0] si deseamos hacer lo contrario (exportar un archivodesde la unidad C de la maquina a un PC).
Para importar un archivo, seleccionamos en la unidad C del control de la maquina elarchivo que queremos exportar (en este caso) y presionamos en la tecla [C: -> I0 ],aparece una caja de diálogos en la que confirmamos que queremos exportar estearchivo.
- 26 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 27/102
MANUAL DE PROGRAMACIÓNDYNA 4M
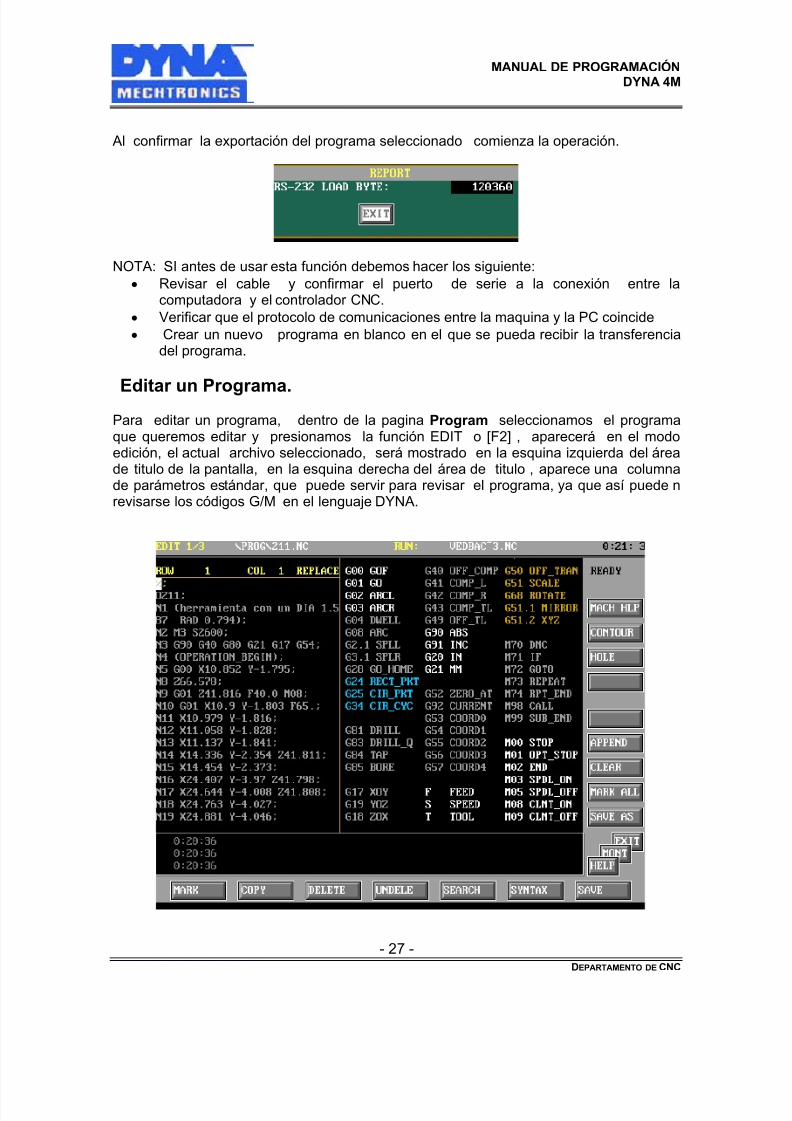
Al confirmar la exportación del programa seleccionado comienza la operación.
NOTA: SI antes de usar esta función debemos hacer los siguiente:• Revisar el cable y confirmar el puerto de serie a la conexión entre la
computadora y el controlador CNC.• Verificar que el protocolo de comunicaciones entre la maquina y la PC coincide• Crear un nuevo programa en blanco en el que se pueda recibir la transferencia
del programa.
Editar un Programa.Para editar un programa, dentro de la pagina Program seleccionamos el programaque queremos editar y presionamos la función EDIT o [F2] , aparecerá en el modoedición, el actual archivo seleccionado, será mostrado en la esquina izquierda del áreade titulo de la pantalla, en la esquina derecha del área de titulo , aparece una columnade parámetros estándar, que puede servir para revisar el programa, ya que así puede nrevisarse los códigos G/M en el lenguaje DYNA.
- 27 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 28/102
MANUAL DE PROGRAMACIÓNDYNA 4M
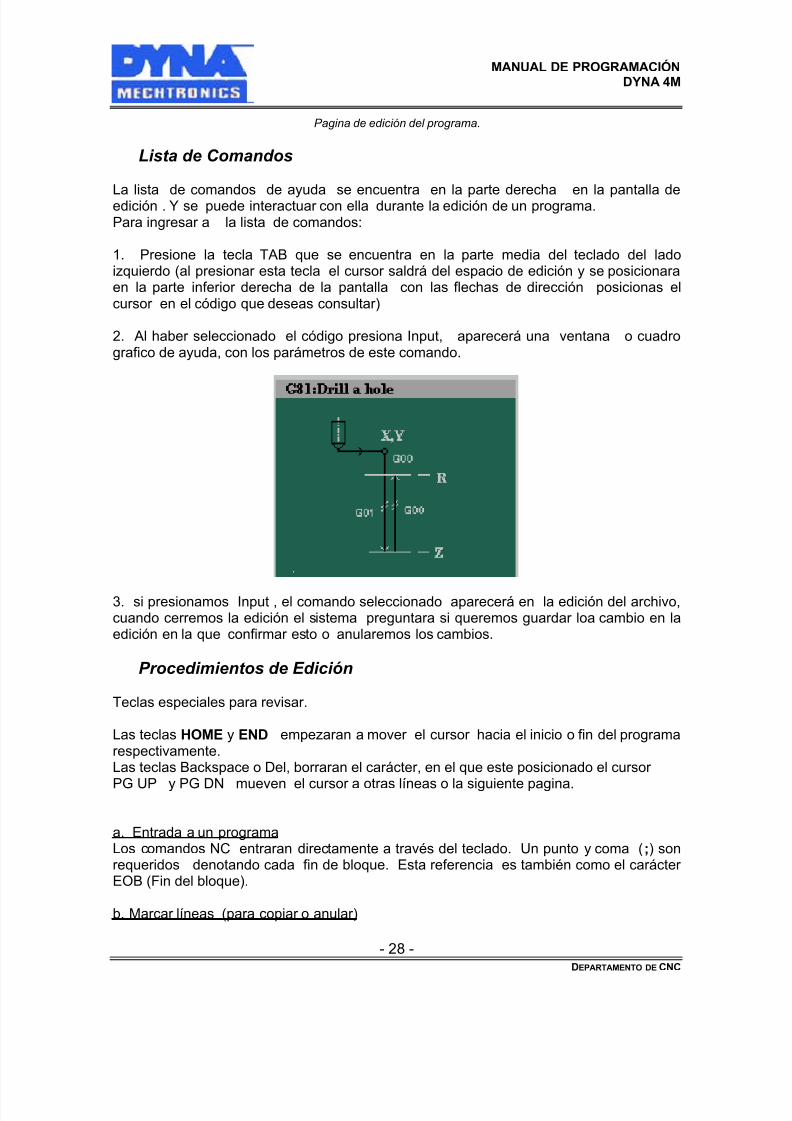
Pagina de edición del programa.
Lista de Comandos
La lista de comandos de ayuda se encuentra en la parte derecha en la pantalla deedición . Y se puede interactuar con ella durante la edición de un programa.Para ingresar a la lista de comandos:
1. Presione la tecla TAB que se encuentra en la parte media del teclado del ladoizquierdo (al presionar esta tecla el cursor saldrá del espacio de edición y se posicionaraen la parte inferior derecha de la pantalla con las flechas de dirección posicionas elcursor en el código que deseas consultar)
2. Al haber seleccionado el código presiona Input, aparecerá una ventana o cuadrografico de ayuda, con los parámetros de este comando.
3. si presionamos Input , el comando seleccionado aparecerá en la edición del archivo,cuando cerremos la edición el sistema preguntara si queremos guardar loa cambio en laedición en la que confirmar esto o anularemos los cambios.
Procedimientos de Edición
Teclas especiales para revisar.
Las teclas HOME y END empezaran a mover el cursor hacia el inicio o fin del programarespectivamente.Las teclas Backspace o Del, borraran el carácter, en el que este posicionado el cursor
PG UP y PG DN mueven el cursor a otras líneas o la siguiente pagina.
a. Entrada a un programaLos comandos NC entraran directamente a través del teclado. Un punto y coma (;) sonrequeridos denotando cada fin de bloque. Esta referencia es también como el carácterEOB (Fin del bloque).
b. Marcar líneas (para copiar o anular)
- 28 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 29/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Localiza el cursor en la línea que esta marcada y presiona la tecla MARCK o F1 en laedición de la ventana . la línea marcada será remarcada, si la línea es remarcada, latecla MARK o F1 cancelaran el estado marcado. Una vez que la línea actual esmarcada el cursor avanzara automáticamente a la próxima línea.
c. Copiar las líneas marcadasUna vez que las líneas son marcadas utilice las función COPY o F2 para copiar unarchivo. Las líneas marcadas serán copiadas en una nueva localización. Las líneaspermanecerán marcadas hasta que usted elimine esta operación. Esto es una restricciónen la función de copiado. Si también intenta copiar líneas o pegarlas a un numero delíneas lejos de su alcance el sistema generara un mensaje de error y el procesó decopiado será rechazado.
d. Anulación delineasLa operación de anulación puede ser seleccionada presionando DELETE o F3 . si laslíneas no están marcadas, la operación de anulación, cancelara la línea actual.
e. Recuperación de líneas borradasPara la recuperación de líneas borradas seleccionamos presionando la teclaUNDELETE o F4.UNDELETE solamente puede recuperar líneas pasadas anuladas por la operación deanulación en la línea actual. Las líneas borradas por la operación de anulación de unbloque no puede ser recuperadas.
f. Buscar la línea o fila.La función de buscar esta disponible, podemos usarla para encontrar la fila o línea queborramos en un programa.. presione la tecla [SEARCH] o F5 y aparecerá una caja dediálogos. Al localizar el numero de la línea que quiere recuperar presione INPUT . alrevisara el curso aparecerá la línea deseada .
Al localizar los caracteres de alguna línea, introduzca los caracteres deseados en lacaja de diálogos y presione INPUT. Los procesos finalizarán después de encontrar elprimer conjunto. Si el conjunto no es encontrado en el programa, en mensaje aparecerádiciendo que este grupo de líneas no fue encontrado.
g. Verificar error de sintaxisPara verificar la sintaxis, presione la tecla [Syntax] o F6 El sistema verificara los erroresde sintaxis empezando de la edición del programa actual, verificara los códigos de loscomandos y los errores de los comandos previniendo los errores en el programa queesta siendo cargado para su ejecución.
La revisión de sintaxis no revisará errores generales de programación causados por valores inadecuados
Una vez que se encontraron los errores de sintaxis , son verificados parando las líneasdel error , este será subrayado y un mensaje detallado del error aparecerá en el área delmensaje.La verificación del mensaje no se ara para la programación general de errorescausados por los valores impropios.
- 29 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 30/102
MANUAL DE PROGRAMACIÓNDYNA 4M
h. Unir otro programa
Para Juntar / Añadir un programa debemos presionara la tecla APPEND o Shift+F7aparecerá la una caja de diálogos y usted podrá llegar a la dirección del programa .presione INPUT y el sistema fusionara el programa que fue elegido.Si el nombre del programa que llamamos no existe, aparecerá mensaje de error y esteprograma no será añadido.
i. Borra el contenido de la ediciónCLEAR permite limpiar mas de una línea a un mismo tiempo para borrarcompletamente del Buffer un programa, presione la tecla CLEAR o Shift + F3. Todaslas líneas marcadas serán borradas . si estas líneas no son marcadas , el contenidoactual de la edición será borrado totalmente, después de presionar Clear, aparece uncuadro diálogos donde confirmamos en YES si queremos borra el contenido delprograma, o anular esta operación
Después de esto el programa solo podrán ser recuperados al cerrar la ventana Edit,aparece una caja de diálogos donde pregunta si queremos guardar los cambiosrealizados en el programa
j. Salvar la edición de los contenidos.Muchas veces durante el proceso de edición, algún archivo puede ser recuperado con eldisco duro con su nombre original presionando la tecla [SAVE ] o F7. el programatambién puede ser salvado bajo otro nombre si seleccionamos [SAVE _AS] opresionando Shift +F1. una caja de diálogos aparecerá , introduzca el nombre delprograma. Este creara un archivo nuevo pero guardar el archivo original.
- 30 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 31/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Especificación de los parámetros de la herramienta
POSI: El numero de Posi es utilizado para indicar laposición del carrusel de la herramienta en o la posición de la torreta como es usada enun programa NC.
ID: Este es solo un numero de referencia, es una propuestade ayuda utilizada en la organización de herramentales, y puede tener masherramientas de las que la maquina debe tener, por lo tanto si una herramienta esutilizada y entonces son guardados sus datos fuera de la maquina esta informaciónpuede ser retenida hasta que la herramienta sea utilizada nuevamente.
TYPE: Es ara indicar el tipo de herramienta. Esto es
necesario para determinar su uso. Por otra parte sirvetambién de referencia.
Z OFFSET: Contiene el desplazamiento del longitud en eleje Z para le herramienta.D: Contiene el diámetro de la herramienta con lasdimensiones de estas.
LIFE: El monitor es usado como muchas veces laherramienta esta siendo utilizada.
Tool Library Management
Los cuatro botones a lo largo de la pantalla pueden ser usados para modificar loslistados en la pantalla y copiar los datos de la herramienta de posición a posición.
COPY:Copiar todos los parámetros de algunas herramientas subrayadas en la memoria.
PASTE :Escribe todos los parámetros de la memoria de las herramientas resaltadas. Copiary pegar pueden ser usadas para copiar los parámetros de las herramientas de una aotra.Seleccionamos una herramienta moviendo con las flechas la línea para resaltar la
herramienta seleccionada.Presionamos la tecla [COPY]Los parámetros de la herramienta son copiados dentro de la memoria.Movemos el cursor hasta la herramienta donde vamos a insertar estos parámetros,posicionados sobre esta presionamos la función [PASTE].La información de los parámetros de la herramienta están siendo guardados, además enla memoria estarán guardados en una nueva posición.
- 31 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 32/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Nota: Los parámetros de la información de la herramienta no serán guardados, hastapresionar la [COPY] o [PASTE] .
CLEAR:
Quita de la memoria los parámetros de las herramientas seleccionadas.INIT:Quita los datos de las herramientas.
MDI: La función MDI esta disponible. Esta operación es utilizada parea probar elcambio de la herramienta y verificar los números de la herramienta.
Igualando la posición de la herramienta en el sistema con la posición del magazine
Una flecha en la pantalla indica la posición actual de la herramienta en el carrusel.La herramienta seleccionada en el magazine puede estar diferente con respecto a la queindica el sistema debido a una operación ilegal.
El rango ADJUST permitirá dar una posición correcta a la herramienta con respecto alsistema de la siguiente forma:Seleccionamos POSI ADJ, aparecerá un recuadro con la leyenda Are you sure?, sipresionamos Yes nos dará acceso para modificar la posición por cada vez quepresionemos la tecla Input la flecha se recorrerá una posición.
Entrada de datos a los parámetros de la herramienta.
La primer pagina de los parámetros de las herramientas solo pueden ser usados poruna vista de datos. Los cambios, deben ser seleccionados subrayando la herramientadeseada con la barra, y presionando la tecla INPUT.
Una vez que presiono la tecla INPUT se cambiara los datos de la pagina para laherramienta que fue subrayada. Referencia en la siguiente figura.
- 32 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 33/102
MANUAL DE PROGRAMACIÓNDYNA 4M
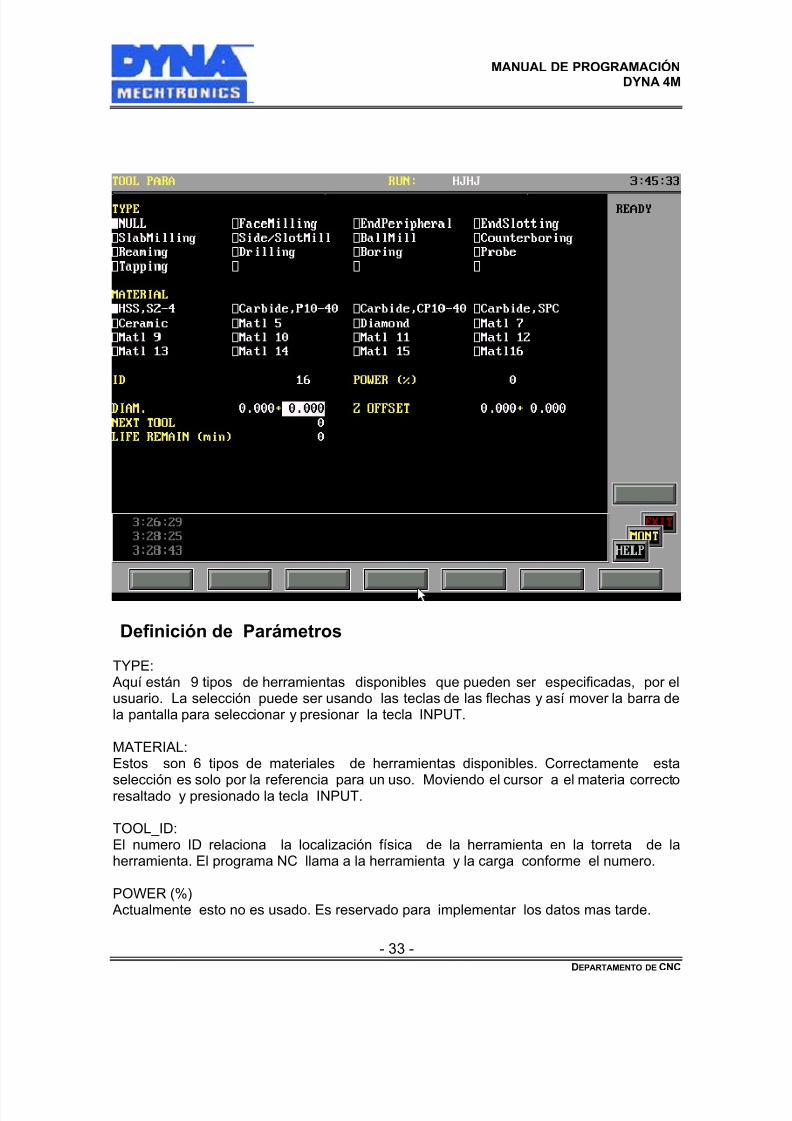
Definición de Parámetros
TYPE: Aquí están 9 tipos de herramientas disponibles que pueden ser especificadas, por elusuario. La selección puede ser usando las teclas de las flechas y así mover la barra dela pantalla para seleccionar y presionar la tecla INPUT.
MATERIAL:Estos son 6 tipos de materiales de herramientas disponibles. Correctamente esta
selección es solo por la referencia para un uso. Moviendo el cursor a el materia correctoresaltado y presionado la tecla INPUT.
TOOL_ID:El numero ID relaciona la localización física de la herramienta en la torreta de laherramienta. El programa NC llama a la herramienta y la carga conforme el numero.
POWER (%) Actualmente esto no es usado. Es reservado para implementar los datos mas tarde.
- 33 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 34/102
MANUAL DE PROGRAMACIÓNDYNA 4M
DIAM:Es usado para el diámetro de la herramienta, es solo necesario para la compensacióndel radio de la herramienta (G41, G42) o cuando modelo de pieza sólida de trabajo es
designada. La forma de estos parámetros consiste en dos partes, en la primeratenemos el valor del radio de la herramienta, la segunda es para el valor agregado,donde después de ser introducido y presionando la tecla Input, el sistema ara el calculoinmediato, del radio de la herramienta.
Z_ OFFSET.Indica la longitud del radio desplazado. Es usado para la compensación en eldesplazamiento de la herramienta (G54). Los formatos en los campos den estosparámetros son los mismos que para DIAM.
LIFE:El tiempo máximo o numero de tiempos de la herramientas usado puede ser metidoaquí puede ser de 0-999 minutos.
LIFE_ REMAIN.Estas indicaciones de la vida restante de la herramienta. Mientras la maquina estacortando, el sistema automáticamente sustraerá el tiempo de corte usado de la vida de laherramienta. Esto también puede ser cambiado por el usuario. Si estos valores sonmenores que cero el sistema dará un mensaje de advertencia si el parámetro de ToolLife Warning es colocado ON (Ver: usar el parámetro montado)
La pantalla puede ser terminada presionando ESC. Una caja de diálogos aparecerá ysugiriendo si los datos se salvan (SAVE). Presione INPUT o SAVE o mueva el cursora ON y presione la tecla [SAVE]. Si se hizo un error, o termine sin ser guardado o usala tecla [OLD] para llamar el valor original del disco duro.
El sistema de la pagina de estado contiene en las coordenadas trabajadas en elsistema, las coordenadas del sistema, la posición actual de la maquina y los limites delsoftware. La posición de cada eje X, Y, Z, U, V, es mostrado abajo. Estos pueden serseleccionados y cambiados.
- 34 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 35/102
MANUAL DE PROGRAMACIÓNDYNA 4M
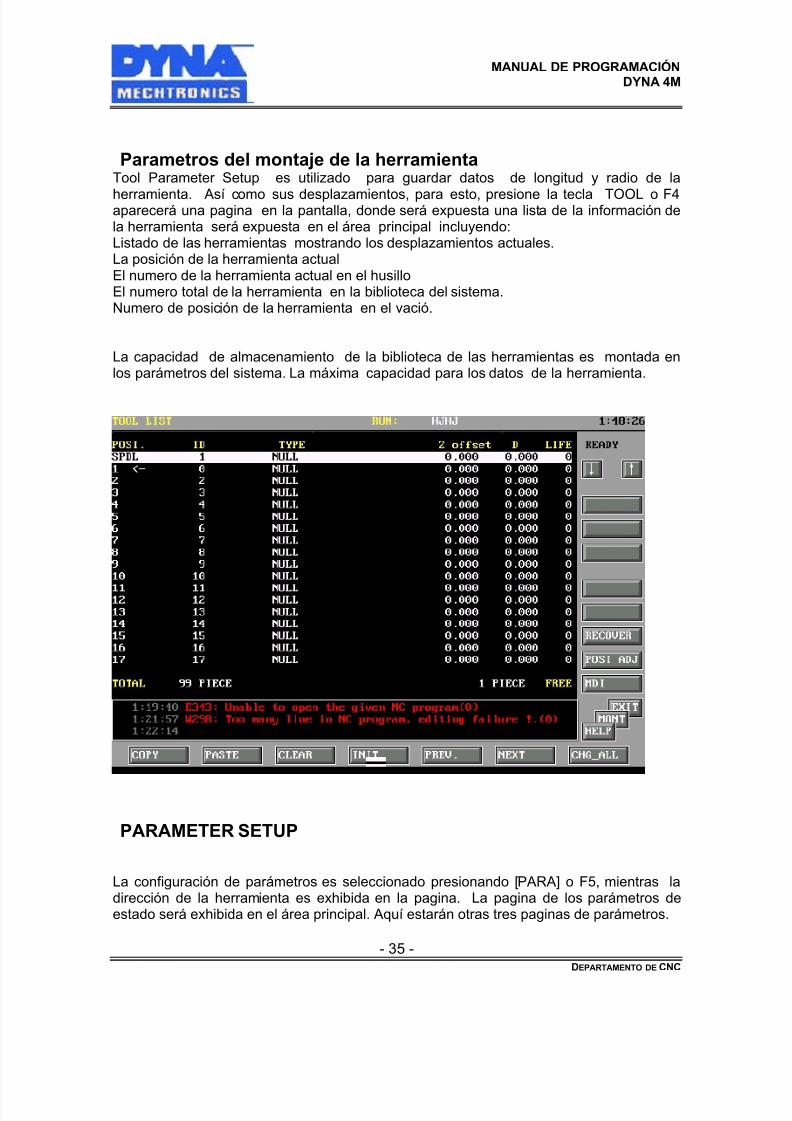
Parametros del montaje de la herramientaTool Parameter Setup es utilizado para guardar datos de longitud y radio de la
herramienta. Así como sus desplazamientos, para esto, presione la tecla TOOL o F4aparecerá una pagina en la pantalla, donde será expuesta una lista de la información dela herramienta será expuesta en el área principal incluyendo:Listado de las herramientas mostrando los desplazamientos actuales.La posición de la herramienta actualEl numero de la herramienta actual en el husilloEl numero total de la herramienta en la biblioteca del sistema.Numero de posición de la herramienta en el vació.
La capacidad de almacenamiento de la biblioteca de las herramientas es montada enlos parámetros del sistema. La máxima capacidad para los datos de la herramienta.
PARAMETER SETUP
La configuración de parámetros es seleccionado presionando [PARA] o F5, mientras ladirección de la herramienta es exhibida en la pagina. La pagina de los parámetros deestado será exhibida en el área principal. Aquí estarán otras tres paginas de parámetros.
- 35 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 36/102
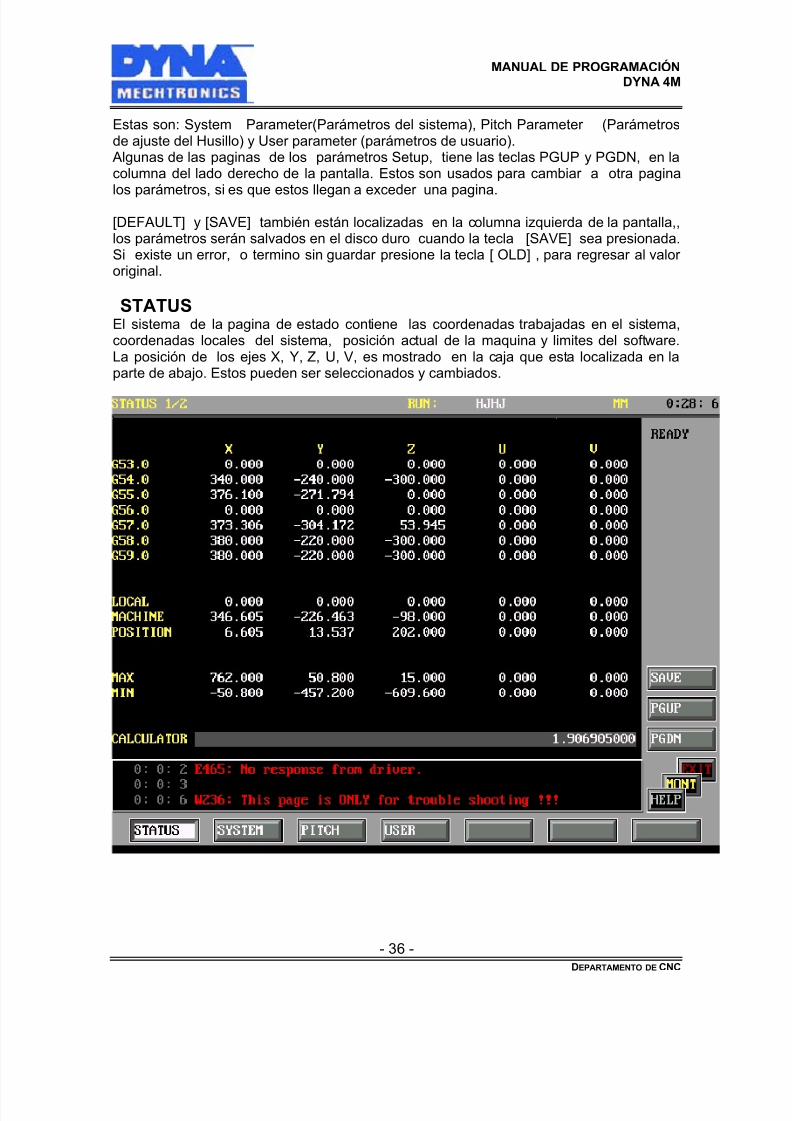
MANUAL DE PROGRAMACIÓNDYNA 4M
Estas son: System Parameter(Parámetros del sistema), Pitch Parameter (Parámetrosde ajuste del Husillo) y User parameter (parámetros de usuario).
Algunas de las paginas de los parámetros Setup, tiene las teclas PGUP y PGDN, en lacolumna del lado derecho de la pantalla. Estos son usados para cambiar a otra pagina
los parámetros, si es que estos llegan a exceder una pagina.[DEFAULT] y [SAVE] también están localizadas en la columna izquierda de la pantalla,,los parámetros serán salvados en el disco duro cuando la tecla [SAVE] sea presionada.Si existe un error, o termino sin guardar presione la tecla [ OLD] , para regresar al valororiginal.
STATUSEl sistema de la pagina de estado contiene las coordenadas trabajadas en el sistema,coordenadas locales del sistema, posición actual de la maquina y limites del software.La posición de los ejes X, Y, Z, U, V, es mostrado en la caja que esta localizada en laparte de abajo. Estos pueden ser seleccionados y cambiados.
- 36 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 37/102
MANUAL DE PROGRAMACIÓNDYNA 4M
EXPLICACIÓN DE LOS PARAMETROS SETUPG53.0*:El sistema de coordenadas de la maquina, las cuales no puede ser cambiado por elusuario. Este es definido, relativo a la maquina. Es el ´´Cero Maquina´´
G54 o G59.9*:El sistema de las coordenadas de trabajo, puede ser definidas por el usuario. Estas sondefinidos relativos al cero pieza. Coordenadas del Sistema
LOCAL:Una coordenada local del sistema puede ser definido para uso temporal. Este es relativo
a las coordenadas actual del sistema de trabajo(G54 – G59). El cero local puede sercambiado a través de la colocación del cero local arriba del panel de control o por el usode los comandos G52-G92 en el programa NC.
MACHINE:Muestra la posición actual relativa de la maquina Machine Home (Psocion de referncia)
POSITION:Muestra la posición relativa actual del eje(Cero actual).
MAX/MIN:Muestra los limites máximos y mínimos del software, los limites actuales que son
colocados individualmente para la maquina. La maquina operar solo con este rango. Estoes usado primero para la protección de la maquina. Si este limite se sobrepasa elsistema enviara un aviso que aparecerá en la parte de abajo, con letras rojas, como señalde un error. Estos son habilitados en los parámetros USER.
CALCULATOR:Es una opción ubicada en la pagina STATUS, nos sirve para resolver operacionesmatemáticas simples podemos seleccionarla, resaltándola con la barra que aparece enla pantalla y presionando la tecla Input.
- 37 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 38/102
MANUAL DE PROGRAMACIÓNDYNA 4M
SISTEMA DE COORDENADAS
El sistema de coordenadas permite la posición de la pieza de trabajo, que lógicamente
es transferida del diseño o de un dibujo localizando la herramienta de la maquina.La siguiente figura describe la dirección de los ejes en el fresado vertical de lamaquina. La dirección de las flechas especifica el movimiento de dirección de la mesade trabajo. El marco mas pequeño de las coordenadas es mostrado a la derecha endirección del movimiento de corte relativos.
De nuevo el sistema de coordenadas, se utiliza para describir la trayectoria y la posiciónrelativa de la herramienta en la pieza de trabajo de la maquina. Estos son tres niveles decoordenadas en el sistema 4M CNC: Coordenadas de la maquina, desplazamiento delas coordenadas de trabajo y las coordenadas locales.
Sistema de coordenadas de la maquina
El sistema de coordenadas locales de la maquina tiene la posición fija que esdeterminada inherentemente con la maquina..algunos posiciones tales como loscambios de posición de la herramienta, la posición de los limites del interruptor, etc. Nopueden ser alterados. El sistema de coordenadas de la maquina es conocidocomo el sistema de la maquina G53 o también referido como el cero absoluto demaquina o el punto de referencia de la maquina.. el máximo rango de movimientopermitido del husillo y la región rectangular en dirección X, Y, Z, respectivamente, elviaje valido de cada eje conforme a G53.
Desplazamiento de Las Coordenadas de trabajo.
Típicamente e el tamaño de la pieza de trabajo y la posición en la mesa de trabajo variaconsiderablemente . por consiguiente describe la posición de la pieza de trabajo relativapara que el punto cero de la maquina sea inconveniente pasar, desde que los valoresno pudieron traducirse para ser dibujados. Este problema es superado por con lascoordenadas de trabajo.
Esto permite usar la colocación de la posición cero m en alguna colocación en el viajede la maquina . entonces las trayectorias, pueden ser descritos en algunos sistemas decoordenadas . el sistema de apoya 6 juegos en el desplazamiento de las coordenadasde trabajo. Estas son llamadas G54 A G59.
COORDENADAS LOCALESLos coordenadas locales son temporales las posiciones de cero que pueden sercolocadas permitiendo la fácil programación. estas pueden ser colocadas y canceladascomo deseen, son colocadas relativamente en el área de trabajo actuales. Soncolocadas cuando un desplazamiento diferente de trabajoSea llamado o por el fin del programa . Estos son : G52 y G92-
- 38 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 39/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Formato de los comandos.Cada programa NC consiste en una serie de comandos NC. cada comando NCconsiste en un código de comando Dyna . examine los siguientes ejemplos.
EJEMPLOS:CODIGOS G/MN100 G100 X 100 Y00
CODIGOS DYNAN1000 G0 X 100N1010 Y100
N1000 es el numero de secuencia . es designado por la letra N y es opcional, solo esnecesario si se llama el subprograma , repetición de programas, definición de bloques,etc.
RE GLAS PARA LOS CODIGOS G y M (ISO)Cuando mas de un código G/M aparece en la misma línea de comandos, la prioridadde la sucesión ejecutada es S, F, T, G.
Mas de un comando puede ser metido en una línea de comandos, por ejemplo en lassiguientes líneas un comando valido es:G54 G40 G21 G91 G17
La longitud máxima de la línea del comando de deberá tener mas de 80 caracteres.Cada línea de comandos deberá ser acabado por un punto y coma(;).
MODAL COMANDSTambién pueden ser usados . un comando modal es un comando que permaneceactivado hasta que es cancelado. Un buen ejemplo del comando Modal es G 90, G00,G01. Cuando G90 (programación absoluta) , es ejecutado el sistema permanece en elmodo absoluto, hasta ser cambiada por el comando G91
Ejemplo:Usando el comando G01 cuando es modal.
G01 Z10 Mueve el eje Z a -10X100; Mueve el eje Z a -10T100; Mueve el eje Z a -10X0; Mueve el eje Z a -10Y0; Mueve el eje Z a -10
Z0: Mueve el eje Z a -10
- 39 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 40/102
MANUAL DE PROGRAMACIÓNDYNA 4M
REGLAS PARA LOS CODIGOS DYNA
No es permitido mas de un código Dyna en cada línea de comando, estos deben sermenor a un espacio entre el código Dyna y sus parámetros . el código Dyna y le códigoG/M pueden aparecer en el mismo programa, pero no en la línea de comandos. Cadacomando tiene un movimiento absoluto como relativo en la coordenada cero (G0) o si elmovimiento es relativo en la posición actual. (GR) Note que el comando de movimientoabsoluto es un ‘‘G0’’ o ‘‘0’’. Y no es un cero.
REGLA GENERAL DEL SISTEMAEl sistema es sensible a la orden de los comandos. Esto efectúa el procesos de loscomandos ‘‘M’’ y algunos comandos ‘‘G’’. Típicamente a si los códigos G y M soncontenidos en el mismo comando el primer comando toma prioridad. Además, lossiguientes No son recomendados
G01G99G17G20X10Y10G81G99G21X10Y10Se prefiere este formato.G99G17G20G01X10Y10G99G21G81X10Y10
Ó bien:G99G17G20GG01X10Y10G99
G21G81X10Y10
DEFINICIÓN DE COMANDOS
COMANDOS ABSOLUTOS E INCREMENTALES (G90 y G91)Un eje puede ser comandado por un movimiento a un punto usando 2 métodosdiferentes. Estos son ABSOLUTOS E INCREMENTALES. Esta se aplica a todos loscomandos en movimiento.
Un comando ABSOLUTO moverá los ejes ala posición relativa del cero actual. Laposición cero debe ser especificada para usar la posición de cero maquina, un
desplazamiento de trabajo, o una posición del cero local.Un comando Incremental (Relativo) moverá los ejes a la posición relativa de la posiciónactual. Por consiguiente la cantidad comandad será igual a la distancia entre la posiciónactual y la posición deseada.
NOTA:Los siguientes comandos son mostrados en los botones del formato de códigos Dynaestán en paréntesis.
- 40 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 41/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G00 (G0F)El movimiento de la herramienta en una línea directamente presenta la posición de la
designación del punto especificado por los parámetros de las coordenadas en el modorápido transversal.Formato:G00X_Y_Z_U_V_ÓG00A_L_Z_
X, Y, Z, U, V,M son la designación de las coordenadas para cada eje A = ángulo y L= Lalongitud, para el destino del punto especificado por los parámetros de las coordenadas enel modo rápido transversal.
Use:
G00X10Y10Z10;G00X10Y10Z10;G00X10Y10;G00Z10;G00A45L10Z-10;
Las coordenadas pueden ser omitidas si estos ejes no tiene ningún movimiento.
G01 Interpolación lineal
Este comando es usado para crear directamente un movimiento lineal, a un punto paraespecificar su alimentación. El movimiento será sincronizado (Salida y paro al mismo
tiempo).Ejemplos:G01 X 30G01 X 30 Y20
CORNER ROUNDING AN FILLETING( Redondeo de esquinas)los parámetros CC o R, pueden ser agregados al final de los comandos G01/G00 paracrear un chaflán o un radio en la esquina . el sistema creara automáticamente unchaflán o un radio en en el radio de una esquina entre el comando G01/G00 y el próximocomando consecutivo G01/G00.Por ejemplo:
G00X0Y0Z0:G01X30:G01Y70C10; (Este creara un chaflán de 10mm)G01X100R5; ( Este creara un radio de 5mm)G01Y10;
C: Es un chaflán de dos líneasR: Es el radio en esquina de dos líneas.Este no puede ser usado por el movimiento de los arcos.
- 41 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 42/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G02 (ARCL)
CW Interpolación del movimiento circularGenerara un movimiento creando un arco en sentido de las manecillas del reloj, usandola especificación de la posición actual y para el punto especificado.Es requerida otra información. El radio ‘‘R’’ puede ser especificada o el centro del arcopuede ser especificado. El centro del arco es descrito por una ‘‘I’’ , ‘‘J’’, ‘‘K’’ o una ‘‘I’’.
La ‘‘J’’, especifica la distancia de la posición del centro delarco en dirección de Y.La ‘‘K’’ especifica la distancia de la posición del centro en el eje Z, sin tener en cuenta lacorriente.El modo I, J y K, son siempre expresadas en valores increméntales.
Formato:G02x_y_i_j_ ó G02X_Y_Z_R_ÓX,Y: Son la posición designada de las coordenadas relativas de cada eje.I,J: Es el centro del arco.
A: Es el ángulo de la posición designada.R : Es el radio. La R indica el circulo mas grande.
Una posición del ángulo puede ser también como la posición designada. Estas sonespecificadas por una ‘‘A’’. Cuando la forma absoluta (G90), el ángulo es relativo al eje+X a ‘‘0 grados’’. Cuando la forma Incremental (G91). A es relativa de la salida delángulo.
G02A_I_J_Uso valido:G02X10Y10I10J10;G02X10Y10Z10I10J10;G02X10Y10Z1I10J10;G02X10Y10R10;G02X10Y10R-10;G02A90I10J0;G02A-90I10J0Z10;
G03 (ARCR)CCW INTERPIOLACION DEL MOVIMIENTO CIRCULAR.
Este es el mismo que G02, excepto que el movimiento es en dirección contraria a lasmanecillas del reloj.
Interpolación Helicoidal.La interpolación helicoidal es apoyada . esto implica la generación de un arco, mientrasse esta moviendo el eje Z. Una posición del eje Z debe ser comandad.
Los siguientes comandos:
- 42 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 43/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G01 X10. Y10. Z10.G02 X10. Y10. Z-5. 1-10.
Genera una revolución con un radio de 10mm en los planos X y Y. Y moverá la posición
de los ejes de –5. si es requerida mas de una revolución, una ‘‘P’’es usada par e indicarel número de revoluciones.Por ejemplo:G01X10Y10Z10G02 X10. Y10. Z-5. 1-10. P5Generara 5 revoluciones. El eje Z deja caer una unidad por revolución.
G02.1 (SPLL) INTERPOLACIÓN, CORTE EN ASPIRAL.
Crea Un corte en espiral en sentido de las manecillas del reloj, dando la alimentación dela presente posición, para el fin del punto especificado por los parámetros. La función espara crear una forma de corte en espiral en un plano indicado.
Formato:G02.1X_Y_Z_I_J_P_X,Y,Z: Es la posición designadaI,J: Es el centro de corte en espiral.P : Es el numero de círculos usados para los cortes múltiples en espiral.Uso:G02.1 X10Y10Z10I0 J0;G02.1 X10Y10I5 J0;G02.1 X10Y10I0 J0P1;
Descripción de G02.1
Mientras en el modo G90, los valores de las coordenadas después de X, Y, Z, U, V, sonrelativas al cero. En el modo G91, serán relativos a la posición actual.El centro del arco, (I y J), es siempre relativo de la salida de posición.P, es usada para el corte en espiral, como tiene un centro en el ángulo mayor que 2p.Cuando P=n, los números de ciclo son mayores que n*2p, pero menor que (n+1)2p.Cuando P00, el parámetro puede ser omitido.
Z es usada para expresar las coordenadas Z del punto final, si es diferemte de laposición de salida.
G03.1 (SPLR) CCW INTERPOLACIÓN DEL CORTE EN SPIRAL.Este es igual a G02.1, excepto que el movimiento es en contra del sentido de las
manecillas del reloj( dirección antihorario)G04 (DWELL)
Este comando es usado para posponer o parar un programa. El tiempo de un retrasopuede ser especificado por los siguientes parámetros.Formato:G04N_G04X_
- 43 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 44/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G04P_N, X, especifica el tiempo de retraso del programa, en segundos. P también especifica eltiempo de retraso del programa , solo que este en milisegundos.Uso:
G04 N1.5;Descripción:El uso de X y N, es idéntico. Puede ser cualquier numero variable. La resolución es0.01 segundos.
G08 (ARC)Genera el movimiento para crear un arco a lo largo de una trayectoria definida por elpunto de inicio , punto medio y punto final dé proporción del alimento
Formato:G08X_Y_Z_I_J_X,Y,Z, Son los puntos finales.
I y J Representa los puntos medios en el circulo.Uso:G08 X10 Y10 I10 J10;G08 X10 Y10 I0 J10;G08 X10 Y10 Z10I10 J10;
Descripción:En el modo G90, el valor de las coordenadas después de X, Y, Z, U, V, y I, J, es relativoal cero local. En el modo de G91, estos son relativos a la salida del punto.Cuando son tres puntos están exactamente en las líneas directamente, los comandostiene la misma función como G01.
Z es usada para expresar el fin del punto del punto en eje Z, si es diferente de la salidadel punto . cuando este no esta en movimiento en el eje z, este parámetro puede seromitido; por otra parte, describe un arco helicoidal. El parámetro Z del punto medio no esnecesario.
G12 (Termino del ciclo CW)
Este comando es designado a la terminación del corte del circulo o el corte de acavadode los círculos.Formato:
G12I_I, es el radio del circulo.
Al usar esta función se tiene que usar la localización de la herramienta en el centro delcirculo, para llamar a G12. Este no será movido en el eje Z . la trayectoria de laherramienta será como sigue:
La compensación del radio, sera aplicadaSiguiendo: Usar G40 antes deG12 ó G13G13 (Termino del ciclo CCW)El mismo que G12 Excepto CCWselección del plano de trabajo
- 44 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 45/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Este comando es designado a la terminación del corte del circulo o el corte de
G17 (XY)
G18 (XZ)G19 (YZ)
Selecciona el plano de trabajó, XY, XZ, YZ, como la programación principal del plano.Formato:
G17; Plano -XYG18; Plano -XZG19; Plano -YZ
Estos comando influenciaran el movimiento en dirección de los ejes.
Descripción de la selección del plano de trabajo.
Entonces G18 o G19 son seleccionados como el plano principal, la relación entre los ejesX, Y, Z, en el programa y sus movimientos en sus ejes actuales son determinados porel MODO XYZ en la pagina de parámetros esta relación es mostrada en la siguientefigura.
CONSEJO DE PROGRAMACIÓN Aunque el absoluto normalmente se usa en la mayoría es uno, el Incremental tiene 3ventajas: solo G17, G18, o G19, necesitan ser cambiados permitiendo correr unprograma en otro plano.
G20 (IN)Define el sistema en la unidad de medida en INCH. Formato:
G20Descripción:Todos los parámetros de longitud del programa NC , tal como X, Y, Z, U, V, R, L, I, J,serán influenciadas por G20, los parámetros se expondrán en la pantalla, también sebasaran en la unidad actual. La unidadEl parámetro de avances también es determinado con referencia de G20
G21 (MM)Define el sistema CNC en las unidades de medida en MM.
G22 (CONTORNO)Ciclo de fresado del contorno
El ciclo de fresado para contorno, permite que sea definido un contorno, con unaprofundidad especificada. El control compensara automáticamente la trayectoria de laherramienta de acuerdo con el tamaño de la herramienta.
Formato:G22N_R_Z_:
N: Especifica el numero de línea (O la etiqueta) donde comienza el contorno .R: Aclara la posición del planoZ: Es la posición del botón en el contorno.
- 45 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 46/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Esta función es definida para usar macro. G41 normalmente es la dirección decompensación del radio de la herramienta. Por lo tanto si la definición de la dirección delcontorno es en sentido de las manecillas del reloj y el valor N es positivo, el Sistema ara
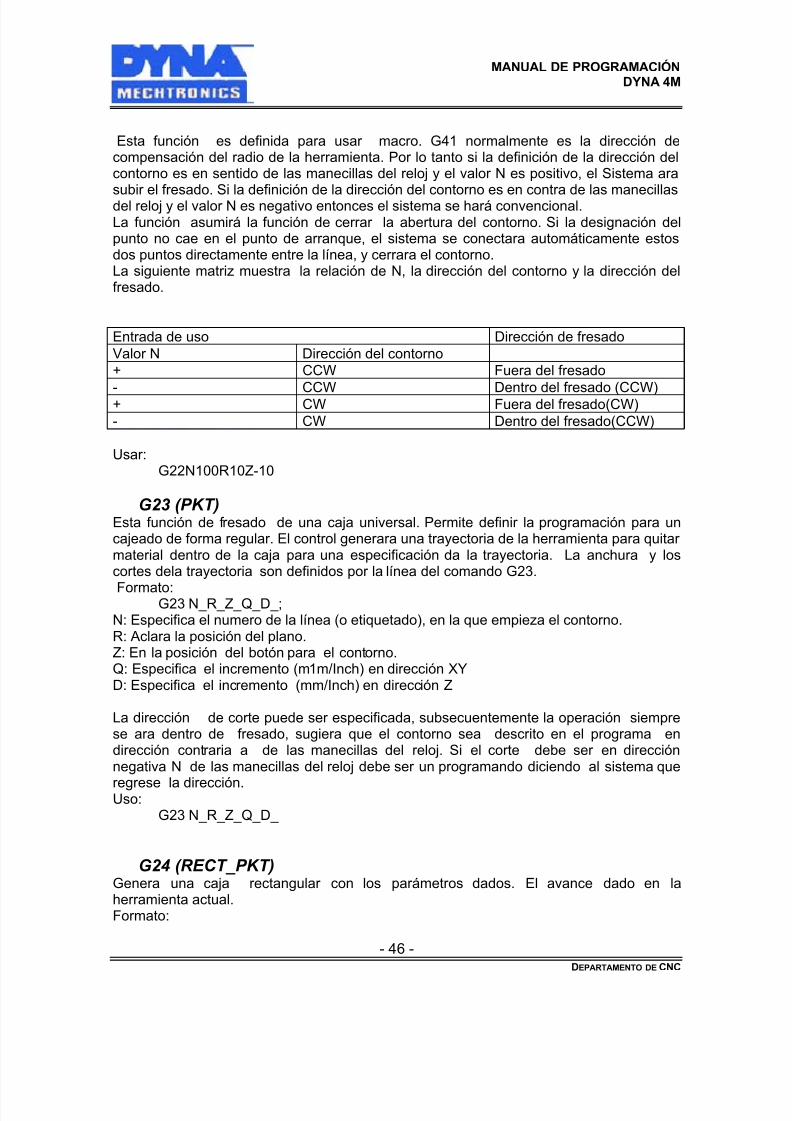
subir el fresado. Si la definición de la dirección del contorno es en contra de las manecillasdel reloj y el valor N es negativo entonces el sistema se hará convencional.La función asumirá la función de cerrar la abertura del contorno. Si la designación delpunto no cae en el punto de arranque, el sistema se conectara automáticamente estosdos puntos directamente entre la línea, y cerrara el contorno.La siguiente matriz muestra la relación de N, la dirección del contorno y la dirección delfresado.
Entrada de uso Dirección de fresadoValor N Dirección del contorno+ CCW Fuera del fresado
- CCW Dentro del fresado (CCW)+ CW Fuera del fresado(CW)- CW Dentro del fresado(CCW)
Usar:G22N100R10Z-10
G23 (PKT)Esta función de fresado de una caja universal. Permite definir la programación para uncajeado de forma regular. El control generara una trayectoria de la herramienta para quitarmaterial dentro de la caja para una especificación da la trayectoria. La anchura y loscortes dela trayectoria son definidos por la línea del comando G23.
Formato:G23 N_R_Z_Q_D_;N: Especifica el numero de la línea (o etiquetado), en la que empieza el contorno.R: Aclara la posición del plano.Z: En la posición del botón para el contorno.Q: Especifica el incremento (m1m/Inch) en dirección XYD: Especifica el incremento (mm/Inch) en dirección Z
La dirección de corte puede ser especificada, subsecuentemente la operación siemprese ara dentro de fresado, sugiera que el contorno sea descrito en el programa endirección contraria a de las manecillas del reloj. Si el corte debe ser en direcciónnegativa N de las manecillas del reloj debe ser un programando diciendo al sistema que
regrese la dirección.Uso:G23 N_R_Z_Q_D_
G24 (RECT_PKT)Genera una caja rectangular con los parámetros dados. El avance dado en laherramienta actual.Formato:
- 46 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 47/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G24 X_Y_L_W_Z_R_Q_D_
XY: Especifica la esquina izquierda debajo de la caja.L : Es la longitud del rectángulo en el eje X.
W : Es lo ancho del rectángulo en el eje YZ : Es la profundidad de la caja en eje Z .R : Es la posición de referencia en el plano.Q : Cantidad deD : Cantidad de corte en Z en cada pasada.
Uso:G24 X10Y10Z-20L100W200R1Q1 óG24 X10Y10Z-20L100W200R1Descripción:La compensación de radio de la herramienta (G41, G42) será cancelada cuando estecorriendo el cajeado rectangular. el sistema usara el radio de la herramienta actual paradeterminar la trayectoria del corte actual.Cuando el radio de la herramienta no esta cancelando los comandos del ciclo o cuandoel radio de la herramienta grande, una alarma se genera el programa será interrumpido.Cuando es omitida la Q, el paso de la alimentaciones definida automáticamente como elradio actual de la herramienta.El avance de penetración es especificado por el uso de un parámetros (Avance de Z enPCK) El avance horizontal es igual para la alimentación.La programación ABS/INC solo influenciara el punto de salida en la caja.
G25 (CIR_PTK)Generara una caja circular dando la alimentación como es descrita por los parámetros.
Formato:G25X_Y_I_J_Z_R_Q_ óG25X_Y_I_J_Z_R_Q_
XY: Son un punto en el circuloI J : Son el centro del circuloZ : Es la posición del botón de la caja.R : Es la posición del plano de referencia.Q : Es el plano del avance
Uso:G25 X10 Y10 Z-20 I50 J50 R1 Q1; ó
G25 X10 Y10 Z-20 I50 J50 R1 Q1;DescripciónLa compensación de radio de la herramienta (G41, G42) será cancelada cuando estecorriendo la caja rectangular. el sistema usara automáticamente el radio de la herramientaactual determinando el corte actual. (Avance de Z en PCK) El avance horizontal es igualpara la alimentación.Si el radio de la herramienta no es definido en los parámetros o radio grande de laherramienta, una alarma será generada y el programa será interrumpido.
- 47 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 48/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Cuando es omitida Q el paso del avance de la herramienta es definida automáticamentecomo el radio de la herramienta actual.El avance de penetración es determinado usando los parámetros (Z Feed In dic) escalculado como un porcentaje del avance de XY . el avance horizontal es igual al avance
actual.G26 (DIE_F)Ciclo de fresado para troquel hembra (Female die Cutting Cycle). Esta es usada paraterminar una caja cuando las paredes de las cajas son perpendicular al botón de la caja.Es designado para crear una arista que no esta a 90°.
Formato:G26 N_R_Z_Q_D_A_
N: Especificación del numero de línea (o etiqueta) donde comienza el contorno.R: Aclara la alturaZ: La posición mas baja del cóncavo.Q: El incremento en dirección Z
D: Especifica el desplazamiento del espesor en el ladso de la pared entre laprogramación de la curva cóncavo real. A es el afilamiento del ángulo del boton cóncavo frontal.
Esta función Es designada al ser usada como un ciclo de maquinado secundario. Cortasolo el contorno del borde de afilamiento . No ara el cajeado. Se sugiere que G23 seausado para encajar y esta función para arreglar y reducir.La compensación de la herramienta será usada y basada en los parámetros actuales dela herramienta G41 , G42 no son requeridos en el programa.
G27 (DIE_M)
Male die cutting cycle(Ciclo de fresado par troquel macho)Formato:G27 N_R_Z_Q_D_A;
Esta función es designada para reflejar la imagen con G26.Ver la definición de los parámetros G26Si la forma del contorno es asimétrica, se usa la función Mirror To Match the Male ParaEmparejar la parte del troquel macho para acoplarla con el troquel hembraEjemplo:
G26 N100R10Z-10Q4D3A5;
La compensación del radio de la herramienta será activado automáticamente basada en
los parámetros de la herramienta actual.
G28 (CERO RETURN)los ingresos las hachas a la referencia (la máquina) cero punto a la proporción delalimento rápidaRegresa los ejes al punto de referencia (De la maquina ) al punto cero a la velocidad decorte.Formato: G28 X Y Z
- 48 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 49/102
MANUAL DE PROGRAMACIÓNDYNA 4M
El siguiente valor de X, Y, Z, no es necesaria. Si los ejes no son especificados , todos losejes regresaran a la posición del cero maquina, sin embargo, los ejes individualespueden ser especificadosUso: G28 XY; Posicionamiento rápido al cero maquina.
G28G34 BOLT CIRCLE (CIR_CYC)Maquinara barrenos repitiendo un circulo dado por la velocidad de corte yla herramienta(en el programa). Antes de llamar el ciclo dado en el control, esta operación de barrenadodeberá ser programada, para controlar la secuencia de operación del ciclo de barrenadode acuerdo a los parámetros del comando G3434.
Formato:G34 I-J-N-
Donde:IJ, son el centro del circulo
A, es el numero de agujeros.N, es el numero d agujeros.
G37 (RECT_CYC)La repetición del ciclo en la matriz por el avance dado y el programa de la herramienta.
Antes de que comienza el ciclo a llamar la operación del barrenado deberá serprogramada. Entonces el control repetirá la operación del barrenado en los agujerossubsecuentes de acuerdo con los parámetros en el comando G37.
Formato:G37 I-J-N-K-
Donde :I J, Son el centro de la distancia del intervalo en dirección XY.N, k, Es la repetición del numero de dirección X, Y.
Compensación de la Herramienta: -G40, G41 G42 G43 Yg49Estos son dos tipos de compensación de la herramienta y la compensación del radio dela herramienta.
COMPENSACIÓN DEL RADIO DE LA HERRAMIENTALa compensación de l radio de la herramienta es uno método para cambiar la trayectoriade la herramienta que esta actualmente en su trayectoria o la programación del latrayectoria derecha o izquierda. Estas facilidades de la tarea del programador desde que
el radio de la herramienta no es necesario calcular y agregar la posición de cadacomando. Normalmente la compensación de corte es programada cambiando por el radioexacto de la herramienta así que la trayectoria coincide con la trayectoria programada. Lafunción TOOL en el mode MENU es usada para meter todos los parámetros tales comoel radio y el diámetro de la herramienta, el desplazamiento de la herramienta (o el uso delvalor) y la longitud de la herramienta.
- 49 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 50/102
MANUAL DE PROGRAMACIÓNDYNA 4M
La cantidad de compensación actual es la suma del radio de la herramienta y sudesplazamiento. La compensación del radio de la herramienta es mas o menos variableen los ejes X-Y.
la compensación del radio de la herramienta es definida y restaurada por el uso de loscomandos G40, G41 y G42 . G40 Es usado para cancelar la compensación del radio dela herramienta.
G40 (OFF_COMP)Cancelar la compensación del radio de la herramientaFormato: G40;
G41Seleccionara el radio de la herramienta del lado izquierda, que es la herramienta, seracompensada a la izquierda de la programación de la compensación del la trayectoria parala dimensión especificada por el valor del radio. El sistema recuperara automáticamente
el radio de la herramienta en la pagina de parámetros. En la indicación el usuario puedeespecificar con un valor adicional de desplazamiento por el uso del parámetro Q en elcomando. La cantidad de compensación total será la suma del valor desplazado y el valorQ.
G41G41 D_G41 Q_
El comando G41 usada por el mismo numero de compensación como el numero de laherramienta. Una D puede especificar un numero d compensación diferente. Una Qespecifica una compensación adicional de adicional del valor o cantidad del radio
G42Seleccionara la compensación del radio de la herramienta derecha que es la herramientaserá compensada a la derecha de la trayectoria programada para la compensación dellado del radio de la herramienta. El sistema recuperara automáticamente el radio de laherramienta correspondiente en el valor desplazado de la pagina de parámetros de laherramienta . en la indicación el uso puede especificar el desplazamiento adicional alvalor usando el parámetro ´´Q´´ en el comando. La cantidad de compensación serasumada al desplazamiento del radio y el valor ‘’Q’’. Los parámetros son los mismos comoG41.
G42G42 D_G42 Q_
Un comando G42 usara el mismo numero de compensación como el numero de laherramienta, una ‘’D’’ puede especificar el numero de compensación diferente. Una ‘’Q’’especifica una compensación adicional del valor o cantidad del valor del radio.Cuando la compensación del radio de la herramienta es activada, el sistema comenzara amirar hacia delante 3 comandos en movimiento o 5 comandos previniendo la
- 50 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 51/102
MANUAL DE PROGRAMACIÓNDYNA 4M
interferencia de la trayectoria de la herramienta, al ver las funciones de adelante sesingulizaran dos modos de paso y el continuo.
INTERFERENCIA
La interferencia de la herramienta puede ser detectada y evitarla, si ocurre dentro de tresmovimientos de los comandos, una alarma será generada el proceso parara. Como semuestra en las siguientes figuras, la interferencia puede ser detectada y evitada.Sin embrago, la siguiente figura muestra la interferencia que no puede ser evitada debidoa l numero de comandos y ocurrirá un sobre corte.
TERMINAR LA COMPENSACIÓNDebe tenerse cuidado también cuando se apaga un giro de compensación. Una salidadebe ser hecha de un perfil.
G43 (compensación de la longitud de la herramienta ) Activa la compensación de la longitud de la herramienta. Esto permite al usuario usar
las herramientas con diferentes longitudes. El sistema recuperara automáticamente eldesplazamiento de valor de la longitud de la herramienta actual y agrega unos valoresadicionales al desplazamiento (Especificado por Q en la línea del comando) para laforma del valor compensado total .
G43G43 H_G43 Q_
La longitud de la herramienta desplazara valores que son unidas a los números de laherramienta. Por otra parte si la herramienta #2 es llamada y aparecerá G43 sin una ‘’H’’el control compensara el desplazamiento del valor de la longitud para la herramienta #2.
si otro valor sigue el control H se usara el desplazamiento del valor para la herramientadefinida en los parámetros como especificación de H.Q permite el desplazamiento de la compensación de la longitud adicional. Lacompensación final de longitud es igual al desplazamiento actual de la herramienta masel valor Q dado en este comando.
Si Q=0, la longitud de la herramienta es igual a cero. La compensación de la longitud esla misma de la longitud de la herramienta. El parámetro Q puede ser omitido en estasituación.
Cancelación de la compensación de la longitud de la herramientaFormato
G49;
G50 (OFF_TRAN)
Cancelar la escala, la rotación y la función de reflejo.
Formato:G50
Vea también G51(Escala), G52(Rotación), G53(Reflejo).
- 51 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 52/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G51 (Escala)Es usado para agrandar o reducir el lado de la forma especificada para un programa . laescala esta dada por los parámetros del sistema.
Formato: G51 I_J_X_Y_Z_;G51 I_J_P_;
X, Y Z, especifican los factores de escala de cada eje.Uso:G51 I0J0X2Y2Z2;
G51 I0J10P2;
DESCRIPCION:El factor de escala puede ser especificado para cada eje para crear una elipse, etc.La escala esta basada en el plano de trabajo.El factor deescala de cada eje puede ser de 0.1 a 100
La funcion de la escala no afectara la compensación del radio de la herramienta. Enalgunas instancias el radio de la escala del arco puede ser la herramienta pequeña parala compensación del radio de la herramienta.
G51.1 (MIRROR)
Los reflejos de las formas especificadas en un programa en un acuerdo de un reflejo deuna linea cuando cuando es definido pordos puntos.
Formato:G51.1X_Y_I_J_
(X,Y) son un punto y (I, J) Son otros puntos en reflejo de la linea.
USE: G51.1 X0Y0I10J10;
Descripción:el reflejo del plano es vertical en el plano principal.G51.1 regresara la trayectoria de la herramienta. La dirección de compensación de laherramienta esta basada en la dirección de la trayectoria después de M53.
G51.2 (X, Y, Z)
La definición del plano principal para la para la programación en los planos otros que
XY, YZ, XY.Descripción:La normal programación del plano principal definida por G17, G18, G19 sean cambiadaspor los comandos G17, G18, G19 son usadas para restaurar el plano de programaciónpor el comando M54.
Formato G51.2 Z_X_Z: Define el ángulo alrededor del eje Z en el cero local.X: Define el ángulo alrededor del eje X en el cero local.
- 52 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 53/102
MANUAL DE PROGRAMACIÓNDYNA 4M
usa un eje X como la rotación de los ejes rotando la Z y los ejes a 45° hacia delante deuna nueva forma en el sistema de coordenadas XYZ.Usar el eje Y, como la rotación de los ejes, rotando al eje X a 30° en sentido contrario de
las manecillas del reloj, para la forma al final de un nuevo sistema de coordenadas.Después del nuevo sistema de coordenadas es formado, todos los comandos que siguenusaran el nuevo sistema de coordenadas hasta que sean llamados los comandos G17,G18 ó G19.
G52 (CERO_AT)Estabilizar el cero local dando un punto
Formato:G52: X_Y_Z_U_V_ óG52A_L_Z_
X, Y, Z, U, V, ó A, L, Z, definen la nueva posición local. Todos los valores sonreferenciados por las coordenadas actuales trabajadas. El modo ABS/INC tendrá el
mismo efecto.USO: G52X10Y10Z10;G52L10A45Z10;
Descripción:el comando solo estabiliza el cero local y no cambia el trabajo actual del sistema decoordenadas.define el sistema de coordenadas de trabajo, aclarando el cer local.
G53 (COORD. 0)
Seleccione el sistema de coordenadas basico del sistema como el sistema de
coordenadas actualmente.Formato: G53
DescripciónEl punto cero de G53 conocido como el cero maquina. Es definido relativamente para elpunto de referncia de la mquina. No puede ser cambiado por el usuario.
G53.1_G53.9G54.0(COORD1)-G54.9G55.0(COORD2)-G55.9G56.0(COORD3)-G56.9G57.0(COORD4)-G57.9
G58.0(COORD5)-G58.9G59.0(COORD6)-G59.9
Selecciona el sistema de coordenadas de trabajo como un sistema de coordenadasprogramadas actualmente .
Formato: G54
Descripción:
- 53 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 54/102
MANUAL DE PROGRAMACIÓNDYNA 4M
el usuario puede seleccionar G53.1 - G59.9 en un comando NC. El punto cero de G53.1- G59.9 puede ser cambiado por el programa NC (G10). Ellos también penden sercambiados de la pagina STATUS.Seleccionando uno diferente G53.1-G53.9 aclarara el sistema de coordenadas local.
G68 (ROTATE)Rodara un programa alrededor de un punto.Formato.
G68 L_J_A_;I,J: Es el punto central de la rotación.R : Es el ángulo de rotación.
G73 (STEP_CYC)El paso del ciclo de barrenado o dando una posición para el avance y la herramienta. Eleje Z alimentara hacia abajo la trayectoria designada por el parámetro. Una vezalcanzado de retractara la cantidad especificada por el parámetro del usuario (Valor M
para G83). El proceso será repetido hasta el final de la trayectoria que es rechazado.Una ‘’P’’ también puede ser especificada para la causa, que para el programa en cadapaso.
Formato:G73 X_Y_Z_R_Q_P_Donde:X, Y; Son la posición del barrenado.Z; Es la posición del botón Hole.R; Es el plano de referencia.P: Es el tiempo d paro de programa para cada paso.Q: Es el incremento de la trayectoria en cada paso.
G74 (TAP_REV)Regresa el machuelado (Mano izquierda) dando una posición. Ver (TAP) para losdetalles.
Formato:G74 X_Y_Z_R_F_ óG74 X_Y_Z_R_E_
Donde:XY: Son la posición de barrenado.Z: Es la posición del botón HoleR: Es el plano de referencia
I,j: Es la cantidad cambiada en dirección de X,Y.La posición esta basada en el modo instruccional absoluto.
G82(DRILL_P)
Avance dando una posición de barrenado con un para, la posición del botón. Este es elmismo como G81, con el paro agregado.
Formato:
- 54 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 55/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G82 X_Y_Z_R_P_
XY, Son la posición de barrenado.Z : Es la posición del botón Hole
R: Es el plano de referencia.P: Es el tiempo de paro del programa con el botón Hole.La posición esta basada en el modo instruccional absoluto/incremental.
G83 (DRILL_Q) PECK DRILLINGEste ciclo se prueba para hacer un agujero en la trayectoria. Alimentara hacia abajo unatrayectoria especifico una ‘’Q’’. Una vez que el nivel es rechazado, el eje Z retractara unalimentación rápida en la senda y entonces la posición de una alimentación rápida yresume la alimentación regular. La distancia entre el punto de corte antes de que elpunto de que la posición dl próximo punto de salida sea especificada por el uso dparámetros M . valor para G83.
Formato:G83 X_Y_Z_Q_R_DondeXY: Son la posición del barrenadoZ: Es el botón HoleR: Es el plano de referenciaF: La longitud de los hilos de la trayectoria, solo es usado en el sistema métrico.E: Numero de hilos por pulgada, solo es usada en el sistema Ingles.
Uso:¼ -20 Taladro, para ser taladrado 1.000’’ profundamente empezando de 0.100anteriormente partiendo de X=0 Y=0.
G84X0Y0Z-1R20F1.0La posición esta basada en la instrucción de forma Incremental / absoluta.
G85 (BORE)El agujero rimado dando una posición de avance y la herramienta. La primer posición deleje Z a la posición del plano ‘’R’’ y entonces se alimenta hacia debajo de las peticionespor ‘’Z’’ . el Husillo regresara por el mismo plano ‘’R’’ con su mismo avance.Formato:
G85 X_Y_Z_R_Donde:X, Y: Son la posición del barrenado.Z: Es la profundidad del agugero.
R: Es la coordenada Z de la salida del plano.P: Es el tiempo de paro del programa (Mili segundos) conel boton Hole, el cero es predeterminado.
La posición esta basada en la instrucción Absoluto / Incremental.
G89 (BORE_S)
- 55 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 56/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Dando una posición de los agujeros rimados y retractados cxon el avance y laherramienta. Este es el mismo que G85 con el paro del programa grabado.
Formato:
G89 X_Y_Z_R_P_Donde:X, Y: Es la posición del agujero.Z : Es la profundidad del agujero.R: Es la coordenada Z de la salida del planoP: Es el tiempo de paro del programa con el botón Hole, el cero es predeterminado.
La posición esta basada en esta basada en la instrucción absoluto Incremental.
G90 (ABS) y G91 (INC)
ABS: Define las coordenadas de forma absoluta.REL: Define las coordenadas de forma relativa (Incrementa).Formato:
G90;G91;
Uso:G00 X0Y0;
G90;G01 X100Y100;G91;G01 X100Y30;
En el ejemplo, G01 mueve a la herramienta a P1 (100,100) y el segundo G01 mueve ala herramienta a P2 (200, 300).Descripción:en la forma ABS, el movimiento de la posición de comando relativo es cero. En la formaREL (Incrementa), la posición del movimiento del coamndo es relativa al punto de salidaa del movimiento comandado.
G92 (CURRENT)
Define el punto de referncia delprograma (Cero local) de unprograma NC.
Formato: G92 X_Y_Z_U_V_G92 A_L_Z_
Donde :X, Y, Z, U, V: Son una nueva posición de coordenadas.
A , L, Z: Es una nueva posición de coordenadas expresadas en el formato decoordenadas del cilindro.
Uso:
- 56 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 57/102
MANUAL DE PROGRAMACIÓNDYNA 4M
G92 X10 Y10 Z10 U0 V0;Las coordenadas de la posición seran (10, 10, 10)Descripción :G92 Siempre define la localización relativa d la herramienta a la nueva local. La forma
existente ABS/INC no afectara este comando.el comando combinara al cero local, pero no cambiara el sistema de coordenadas detrabajo.
G94 (F_MIN)
Este comando coloca el tipo de avance como mm/min.
G95 (F_REV)Este comando coloca el tipo de avance como mm/rev.
G98 y G99 (END_Z0 y END_R)Estos comandos son usados para los ciclos de barrenado, machuelado y rimado. Ellosespecifican la posición para el eje Z , una vez el agujero es maquinado, los ejes X,Y,son movidos a una localización subsecuente para otro agujero. Las opciones para el ejeZ debe ser posicionado en el punto inicial antes de llamar al ciclo a la posiciónespecificada por el parámetro R.
G98Posicionara al eje Z en la posición inicial entre los agujeros ,por ejemplo si el eje Z esposicionado por un valor absoluto de 25mm y el ciclo tiene como un valor de absoluto de25mm en el eje Z , será movido a 2mm entre los agujeros.
G99Posicionara el eje Z en la posición especificada por el pár5ametro ‘’R’’ entre losagujeros por ejemplo si el eje Z es posicionado en el valor positivo de 25mm y el ciclotiene un valor de 25MM en el eje Z sera movido a 2mm entre los agujeros.
Estos son dos comandos especiales DYNA con códigos no correspondientes a G .
SMOOTHEste comando es usado para cambiar un programa NC.
ZFEED: Este comando permite incrementar el avance en el eje Z , usando el ciclo de lacaja en un programa NC . El usuario puede especificar y modificar el avance en el ejeZ , usando un ciclo de cajas, solo en el uso de parámetros antes de la versión 2.2después de la versión 2.2 puede ser cambiado por los comandos NC. Este es uncomando modal. Una vez que la alimentación es combinada, todos los avancessiguientes en lacaja del ciclo seran alterados hasta otro comando que es usandoZFEED.
- 57 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 58/102
MANUAL DE PROGRAMACIÓNDYNA 4M
DEFINICIÓN DE LOS CODIGOS M
M00 (STOP)Un M00 causara que pare el programa. El movimiento de los ejes se causara y seráapagado el refrigerante y el giro del Husillo.
En CNC será una alimentación sostendrá el estado que puede ser resumido presionadola tecla CYCLE START. El refrigerante y el Husillo deben ser programados para venir.
M01 (OPT_STOP)Un M01 tiene exactamente la misma función como un M00 excepto que solo seráafectado si el interruptor OPTIONAL STOP esta en la posición de ON. El movimiento delos ejes, el Husillo y el refrigerante será parado . el CNC permanecerá en laalimentación del estado del agujero que es presionada la tecla CYCLE START.
M02 (END)El M02 es el fin de un programa (STATEMENT), para el husillo y el refrigerante.Entonces el programa NC será restablecido para empezar.
M03 (SLPD_ON)Un M03 girara el motor del husillo hacia adelante en direccion de las mencillas del reloj.La velocidad debera especificar usando un comando. Se reestablecera hasta que seaejecutado un comando M00, M01, M02, M05 ó M30.
M04 (SLPD_REV)Un M04 girara el motor deL Husillo hacia atrás en dirección contraria a las manecillasdel reloj. La velocidad deberá ser especificada usando el comando ‘’S’’. Permanecera
hasta que sea ejecutado uno de los comandos M00. M01, M05, M02 ó M30.MO5 (SPDL_REV)
Un comando M05 apagara el motor del Husillo y lo parara.Formato :M05;
M08 (CLNT_ON) PRENDER EL SOLUBLEUn M08 girara la bomba del refrigerante
- 58 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 59/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Formato:M08
M09 (CLNT_OFF) APAGAR EL SOLUBLE
Un M09 parara la bomba del refrigerante.
M13-SPINDLE (FORDWAD) AND COOLANT ONUn M13 encenderá el giro del Husillo con dirección hacia adelante y también seenciende el giro de la bomba del refrigerante.
M134- SPINDLE (REVERSE )AND COOLANT ONUn M14 encenderá el giro del Husillo con dirección hacia atrás y también se enciende elgiro de la bomba del refrigerante.
M19 (SLPD_ORNT)Un M19 rueda el Husillo hacia la posición de orientación. Este es usado para permitir laalineación de la herramienta en el cambio del carrusel.
Descripción:La posición de orientación puede ser ajustada del paso del parametyro del sistema.este comando es definido por el uso del macro. Puede ser definido si es necesario.
M22 (SYNC_OUT)M23 (SYNC_WAIT)
Un M22 y un M23 son usados para unir un dispositivo auxiliar. Típicamente la maquinaviene con una terminal para las conexiones. La terminal strip contiene los contactos queson conectados Inter. La función puede ser modificada por el usuario proporcionando lafunción necesaria. Puede ser el signo de latching que son detenidos una vez que elsigno de acabado se recibe.
La función es determinada por el código que es programado en el archivo‘’4M_SUB:DAT. Estos son dos contactos disponibles. Ellos son N130 y N131.2 lossignos de inicio (Termino ) están disponibles también. Ellos son X60 Yx61.
El código puede ser escrito para crear un pulso, un código M con el termino del signo, oun código M que es terminado con otro codigo M.
Formato:M22
Examine lo siguiente:El siguiente tipo de código M creara un pulso A 2 SEGUNDOS.//M22ON N131DWELL 02OFF 131
- 59 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 60/102
MANUAL DE PROGRAMACIÓNDYNA 4M
M99Esta muestra creara un código M del tipo que espera por un signo de acabado (X60)//M22ON 131
WAIT X-60OFF 131M99
M30 (REWIND)Es usado en el fin del programa. Tiene la misma función que M02.Formato:M30;
M39 (AUTO OFF)Se impulsan automáticamente fuera del comando.
M60 (OFF)Reestablece el estado de CNCFormato:M60 N_N: Es el numero de estado (128-255)Uso:M60 N136
Descripción:Este estado de CNC es usado para la comunicación entre CNC y plc. Una escalera dePLC Xxx muestra el estado de Nxx en CNC.
El estado de CNC 160-255 tiene especificada la definición en el sistema CNC. Tomeprecaución cuando cambie el estado flag.el estado CNC de 128-159 es regresado para usar su definición.
M61 (ON)
Define el estado de CNCFormato:M61 N_N: Es el numero de estado (128-255)Uso:M61 N136
Descripción:Este estado de CNC es usado para la comunicación entre CNC y plc. Una escalera dePLC Xxx muestra el estado de Nxx en CNC.El estado de CNC 160-255 tiene especificada la definición en el sistema CNC. Tomeprecaución cuando cambie el estado flag.
El estado CNC de 128-159 es regresado para usar su definición.
- 60 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 61/102
MANUAL DE PROGRAMACIÓNDYNA 4M
M62 (WAIT)Espera un signo del PLC, solo un contacto puede aparecer en uncomando.Formato:
M62 X_;M62 Y_;M62 M_;M62 E_;M62 C_;M62 T_;
X, Y, M, E,C, T, son un contacto del PLC ver la definición de referencia del PLC.M70 (DNC)
Leer un archivo NC de un puerto del cerial de un archivo NC y corre un programa en elmodo DNC.Formato:
M70 _;Uso:M70;M70 FIRST.NC;
Descripción:Llamando un programa DNC no esta permitido (M70 no puede ser anidado).Si M70 es el siguiente por el nombre del archivo, el sistema CNC recuperara laespecificación el archivo del disco duro es recomendado que este sea usado paracorrer a lo largo (Over 1 M Bytes) del programa NC usando M70.Los comandos GOTO, CALL, REPEAT no son permitidos en el programa DNC.
M71 (IF)Crea un programa condicional saltándose una línea especificada. Las condiciones sonrequeridas, si estas condiciones son encontradas en el salto aparecerá la líneaespecificada, si no se encuentra, el programa se posicionara en la próxima línea.Formato:M71 N_>_;M71 N_<_;M71 X_;M71 Y_;M71 M_;M71 E_;M71 C_;
M71 T_;
Donde;X, Y, M, E, C, T, son variables del PLC.Uso:
M71 N#23> 0.5;GOTO N111;
#23=#26,
- 61 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 62/102
MANUAL DE PROGRAMACIÓNDYNA 4M
descripción:Las expresiones deben venir después de la N. Si la expresión es cierta, ejecuta elpróximo comando después del comando IF. Si la expresión es falsa, saltara al siguientecomando IF y ejecutara el siguiente comando. En el ejemplo anterior, si la expresión es
verdadera el programa saltara a la línea numero 111. si es falsa ejecutara el comandoasignado : #23=#26.la expresión condicional puede contener un constante y/o una expresión aritmética , ‘’IFX-20’’, esto significa que un signo de entrada esta debajo de X20, entonces X-20 esverdadero. ‘’IFX20’’ significa que el signo de entrada hacia arriba de X120, entoces X120es verdadero.
M72 (GOTO)Un salto incondicional es especificado en el nuemro de la linea.Formato:
M: 72_NN: Es el nuemero de linea en un programa NC.
Descripción:Los comandos GOTO no son permitidos en un programa DNC.El numero de la linea para uso normal en el programa NC debe estar dentro de 0-9999.el numero de la linea en el rango -10000 -- -29999 quie son especialmente usados por elusuario macro.la duplicación es el mismo numero de la linea que no permite estar en un programa NC.
M73 (REPEAT)M74 (RPT_END)
M73: Es usado para ejecutar el programa NC entre M73 y M74 para N veces.M74: Es usado para el estado de la vuelta Flag
Formato:M73 N_;M74;
N: Es el numero de repeticiones.Uso:M73 N4;Descripción:Un programa con el comando REPEAT debera contener u RPT_END.
No mas de 3 repeticiones de este son repetidas.El comando REPEAT no permite un programa DNC.
M76 (NEW)Empieza la ejecución de un nuevo programa una vez que el programa este corriendohasta el final actualmente. El proximo nombre del programa es dado depuse de M76.Formato: M76 Nombre del archivoUso:M76 FIRST.NC
- 62 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 63/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Descripción:La definición aquí es diferente de mas antigua del sistema CNC porque la función derebobinado de la cinta no es necesariamente mas larga en el sistema 4M_CNC.Si el nombre del archivo sigue el M76, esta función será la misma que M00.
M77 (BLOCK)M78 (BK_END)
M77 describe el comienzo de un bloque y transfiere la selección de los parámetros alenlatado del ciclo de comandos M78 describe el fin de un bloque.Formato:M77 A_B_C_..N_;
A, B, C: son parámetros que serán transferidos al ciclo de comandos guardado, M78;Uso:M77 X#23Y#24....
....M78;
Descripción:Es usada para guardar los ciclos de los comandos que son descritos por los comandosmúltiples.M77 deberá ser usado de con M78Usa un macroprograma.
M79 (ERROR)Llama el mensaje de error en la función de proceso. Mostrara una especificación de unmensaje de error en la pantalla. Es usado generalmente en un macroprograma y tiene el
mismo efecto como el error ocurrido dentro del sistema.Formato:M79 N_N: Es el numero de mensaje de error mostrado en la pantalla.Estos son cientos de mensajes de error numerados. Este comando de error numeradosde mensajes de error.
M80 (SPLD_CAL)Calcula la velocidad del husilloFormato: M80Descripción:Este comando notifica al sistema la determinación actual de la velocidad del Husillo. La
velocidad del husillo actual sera guardada en el uso del parámetro #105.
M81 (TC)
El intercambio de los datos de la herramienta entre el Husillo y el numero de herramientaespecificado por N_ en el comando M81.Formato: M81 N_Descripción
- 63 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 64/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Este es un comando de no-movimiento. Los intercambios de la herramienta 0(herramienta ) # en el Husillocon la especificación de la herramienta #.Este comando es usado para asegurar que los datos de la herramienta en Matches CNCcon el cambio de la herramienta actual. Este comando es normalmente usado en el
cambio de la herramienta macro.
M82 (TS)La herramienta seccionada, y calculación de los pasos de movimientos.Formato:M82 N_MN: Es el número de herramienta seleccionada.Descripción:
Este comando de no-movimiento compara la hendidura del numero d herramientaactual (la fase de la hendidura para el husillo) con la herramienta 3 que es dada con elcomando M82. después de la comparación de la distancia (# # de la herramienta se
aparte de hendidura ) y la dirección opcional será determinada y guardada. Tambiénactualizara la herramienta 3 que es usada en el sistema CNC.Si la herramienta que existe comienza a seleccionar la distancia de las hendiduras TCserá asignada para #110. si no existe, un mensaje de error cera mostrado en la pantallay los parámetros serán cambiados.
M84 (S_MODE)El husillo en el modo de mando sincrono o no sincrono. formato: M84 n_
Descripción:Cuando N=0 define al husillo para su modo no sincrono. Cuando N= 1, define el Husilloen su modo Sincrono.
M86 (PLC_WR)Escribe los datos para el contador de PLC.Formato:M86 N_D_N: Es el numero de contador.D: Son los datos escritos.
M87 (PUSH)M88(POP
M87 se usa para agilizar el estado del sistema actual para apilar .
M88 se usa para hacer estallar el estado dels sistema actual para apilar.Formato: M87;
....
....M88;
Descripción:El anidado no es permitido.
- 64 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 65/102
MANUAL DE PROGRAMACIÓNDYNA 4M
los siguientes estados seran presionados y estallados: la compenscion del estado de laherramienta, plano principal, trabajo actual dl sistema de coordenadas, cero local,velocidad del husillo, el estado del refrigerante.
M89 (SHOW)Mostrara un mensaje especificado en el cordón de la pantalla.
M98 (CALL)M99 (SUB_END)
M98 llama a un subprograma que es localizado en el mismo programa NC. Laejecución comienza dando el numero de una linea y regresando a M99 (SUB_:END).M99 es usado con el fin de un subprograma.Formato: M98 N_L_N: Define el numero d salida de la subrutina.L: Especifica como muchas veces si el progrma sera duplicado.
Formato:M99Uso:M98 N10000;........M02;........N1000 G00 X0 Y0;........M99Descripcio:El comando CALL no puede ser usado en el programa DNC.
No son permitidos mas de 3 niveles de nesting en el subprograma.
DEFINICIÓN DE OTROS CODIGOS
F (FEED)Define el avance de corteFormato F_Uso:
F1000;G00 X00F1000;
Descripción:El avance actual es relativo a los estados de avance de sobre manejo.En el caso del arco pequeño y la salida de la línea corta, el avance actual puede ser maslento que el avance comandado.Si el avance programado es mayor que el limite del avance, el avance actual serácolocado al avance máximo.la unidad de avance es de mm/min. Cuando el sistema de unidades esta en mm y eninch/min, cuando el sistema esta en Inch.
- 65 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 66/102
MANUAL DE PROGRAMACIÓNDYNA 4M
S(SPEED)Define la velocidad del husilloFormato: S_
Uso: S 1000;G00X100Y100S1000;Descripción:La velocidad del husillo actual es la programación del tiempo de velocidad del husillo conel factor de sobremanejo.si la velocidad del husillo esmayor que el limite de velociodad, la velocidad máxima seraduplicada.
Mensajes de Error y soluciones
100 UNDERFINED ERROR(Error no definido)Causa: Es un error recibido por el sistema, del que no se sabe el origen.. este podría sercausado por una comunicación deficiente o por ruido.Solución: Es recomendado reiniciar el sistema.Si esto pasa frecuentemente , cheque la comunicación de los cables y tierra.
101 NO MEMORY SPACENo hay espacio en la memoria
Causa: El sistema detecta que tiene solo 560 KB de memoriaSolución: modificar el archivo AUTOEXEC.BAT ó CONFIG.SYS. un método mas fácilseria
102 INTERRUPTOR ERRORError del interruptorCausa: Error del sistema, podría ser causado por un software dañado o que este mal latarjeta madre.Solución: intente apagando y encendiendo el sistema. Contacte a su distribuidos o losservicio de Dyna
103 TOO MANY
Demasiados
104 DISK SPACE OVERFLOWSaturación del disco
Causa: El sistema checa todos los programas disponibles almacenados en un espaciomayor de 10 Mega Bytes. Esto ocurre cuando el sistema fue iniciado.Solución: Borre los programas innecesarios.
105 PARAMETER CHANGE PROTECTED BY USER PASSWORD
- 66 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 67/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Cambio del parámetro protegido por la contraseña del usuarioCausa: Una contraseña que fue colocada por el usuario.Solución: Introducir correctamente el password.
106 NABLE TO OPEN ANY FILENo puede abrir ningún archivo.Causa: El sistema no puede encontrar la localización de los programas NC.Solución: Verifique que \PROG o la dirección especificada por #106 en el archivo‘’4M_STR.DAT’’ exista.
107 TOO MANY ITEMS IN DYN FILESaturación de artículos en los archivos Dyn.
Causa: la cantidad de especificaciones de los códigos DYNA, están fuera del espacioreservado.Solución: Reemplace del ‘’4M_CODE.H’’ a un diskette de respaldo.
108 IMAGEN BUFFER OVERFLOWSaturación del buffer de imagen
Causa: El sistema esta en estado desordenado.Solución: Apagar y encender nuevamente el sistema.
109 IMAGE RESTORE FAILUREFalla en la restauración de imagen.
Causa: El sistema esta en estado desordenado..Solución: Apague y encienda nuevamente el sistema.
110 NO SUCH ITEMSin un articulo semejante
Causa: Al buscar, no podrá ser localizado, el articulo especificado.Solución: Verifique que la palabra o articulo haya sido introducida correctamente.
111 DISK SPACE NOT ENOUGH FOR EDITOREspacio insuficiente en el disco para el editor
Causa: La memoria disponible de almacenamiento, es de 10 Megabytes.Solución: Elimine del disco los archivos innecesarios, para tener mas espacio en lamemoria.
112 PLEASE GO HOME BEFORE RUN AND MDIPor favor regrese a home antes de correr MDI.
Causa: En la operación automática es necesario regresar antes a cero para reSolución: Realice la operación de regresar a cero.
113 CAN’T FIND 8 x 16 BIT MAPNo puede encontrase el mapa de bit 8x16.Causa: Existen problemas en la computadora, o puede ser que la computadora utilizadano sea compatible.Solución: vea si en otra computadora si es posible encontrar el mapa de bits. Si el laalarma de la maquina es activada, contacte al departamento d servicio
- 67 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 68/102
MANUAL DE PROGRAMACIÓNDYNA 4M
114 Z AXIS MUST BE RETRACTED BELOW LIMIT SWITCH.El eje Z, debe retraerse por debajo del limit switch
Causa: Regreso a posición cero, es requerida cuando se hace contacto con ellimit switch.Solución: Retracte al eje Z, para poder regresar a cero.
115 G/M CODE DEFINITION FORMAT ERRORFormato de error en la definición de códigos G/MCausa: Un código invalido a sido detectado durante una la operación de revisión desintaxis.Solución: Examine el programa y verifíquelo.
116 TEACH BUFFER OVERFLOWCausa: El numero de puntos Teach-in a excedido el limite máximo ().Solución: Divide el numero de puntos en mas operaciones.
117 SYSTEM MUST BE RE-BOOTEDEl sistema debe reiniciarseCausa: El sistema reporta estado de desordenSolución: Apague la maquina y vuélvala a encender. Si el problema persiste contacte eldepartamento de servicio.
118 NO MOUSE DRIVER FOUNDNo se encuentra el controlador del Mouse
Causa: El sistema no puede encontrar el controlador del mouse.Solución: Para cargar correctamente el mouse, cargué en la dirección correcta loscontroladores.
119. THE VALUE OF LABEL SENSOR OVERFLOWCausa: Una etiqueta invalida a sido requerida durante el proceso de diseño de unaventanaSolución: Introduzca una etiqueta valida.
120 UNABLE TO LOCATE OLD WORK PIECENo puede localizar la pieza anterior
Causa: El sistema no puede localizar las coordenadas de la pieza de trabajo, guardadaspreviamente.Solución: Vuelva a introducir los valores. Si esto vuelve suceder, contacte aldepartamento de servicio.
121 TOOL RADIUS TOO LARGE, CUTTING SIMULATION CLOSEDEl radio de la herramienta es muy grande, cierre la simulación de corte.
Causa: El radio actual de la herramienta, es de dimensiones mayores al la pieza detrabajo definida.Solución: incrementar el tamaño de la pieza de trabajo sólida o reducir el radio de laherramienta.
- 68 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 69/102
MANUAL DE PROGRAMACIÓNDYNA 4M
122 WORK-PIECE TOO SMALL, CUTTING SIMULATION CLOSEDLa pieza de trabajo es muy pequeña, cierre la simulación de corte.
Causa: La pieza de trabajo definida en los parámetros del usuario, tiene un ‘’0’’ en uno delos parámetros.
Solución: introduzca el valor correcto de o la longitud de la pieza de trabajo.123 TOO MANY ITEMS TO COPY AT ONE TIME
Se copiaron demasiados articulo en un tiempo.Causa: Un excesivo número de artículos fueron seleccionados para ser copiados.Solución: Reducir el numero de artículos seleccionados.
124 OPERATION CANCELED BY USEROperación cancelada por el usuario
Causa: Mensaje solo para la información de usuarioSolución: No se debe llevare a cavo ninguno.
125 NO PLC DOWNLOAD FILE CREATEDCausa: La generación del archivo fallo.Solución: Pruebe verificando el procedimiento o recopile el programa del PLC.
127 TOOL CALIBRATIO FAILURE, CHECK THE SIGNAL FROM THE PROBEFallo la calibración, verifique la señal de prueba.
causa: La señal de prueba no fue recibida Dentro de la distancia manejada en losparámetros del usuario.Solución . Verifique que la prueba este funcionando. Si esta funcionando incremente lalongitud de la prueba recorte la distancia de prueba
128 INPUT CORRECT AXIS LABELIntroduzca el nivel correcto del eje
Causa: Fue designado un nombre invalido a un eje (X, Y, Z, ó 4ht, no)Solución: Checar el programa NC.
129 NO SUCH LINENo existe tal línea
Causa: la línea especificada en la operación actual no existe.Solución: verifique que la línea o el número de línea que esta llamando sea correcto.
130 ZERO RETURN PROIBITED BY SYSTEM SETUPNo se puede realizar la operación Zero Return en el sistema SETUP
Causa . Regreso al cero, es requerido por un eje al que no le fue especificado realizar elregreso a cero.Solución: cambie los parámetros del sistema, para permitir el regreso a cero.
131 TIME OUT, OPERTATION CANCELED BY THE CNCTiempo fuera, operación cancelada por CNC.
Causa: RS-232 no responde, no fue recibida durante el tiempo limite del sistema deparámetros.Solución: 1 Asegurarse de que la configuración del cable sea correcta.
- 69 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 70/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Asegurarse de que el cable este conectado correctamente.Incrementar el parámetro COMM WAITING TIME
132 COORDINATE VALUE TOO LARGE
Valor de coordinación muy largoCausa: Reporta el valor de una coordenada que ha excedido el numero deespecificaciones.Solución: cheque la especificaciones y vuelva a introducirlas.
133 UNKNOW DNC COMMAND RECEIVEDNo se conoce el comando recibido.
Causa: El sistema recibió un comando invalido durante la operación DNC.Solución: Verifique el cable y el protocolo.
134 NO RESPOND RECEIVED, DNC CANCEL.No responde la señal DNC recibida.
Causa: RS-232 no responde, no fue recibida durante el tiempo limite del sistema deparámetros.Solución . Incremente el parámetro OPER WAITING TIME
135 MACHINE IS MOVING-STOP IT AND TRY AGAINLa maquina se esta moviendo, deténgala e inténtelo de Nuevo.Causa: Se intento realizar una operación cuando la maquina estaba en el modo auto.Solución: Presione la tecla RESET para cancelar la operación.
136 SYSTEM IN PROGRAM LOCK MODE, SAVE IS NOT ALLOWED.Causa : El parámetro PROGRAM LOCK en los parámetros de usuario esta colocado enONSolución : Cambie el parámetro PROGRAM LOCK a OFF.
138 NO AXIS SELECTED, OPERATION CANCEL.Eje no seleccionado, operación cancelada
Causa: Se intento realizar una operación en el modo Hand-whel pero no estabaseleccionado ningún eje.Solución : Seleccione un eje, presionando la tecla del eje correspondiente.
139 TOOL LIFE EXHAUSTEDTermino el tiempo de Vida útil de la herramienta
Causa: El valor colocado en los parámetros de vida útil de la herramienta an sidoexcedidos.Solución : Deshabilite Tool life Cheking o borre lo valor de vida útil de la herramienta.
141 IT IS EMPTY TOOLNo hay herramienta
Causa: Fue especificada una herramienta de identificación (ID) ‘’ 0 ‘’.Solución: Cambie el numero de identificación de herramienta o verifique el estado deidentificación de todas las herramientas.
142 X128-X255 CAN NOT BE RESERVED
- 70 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 71/102
MANUAL DE PROGRAMACIÓNDYNA 4M
No puede ser reservado X128-X255
144 TOOL PHAT INTERFACEInternase en la trayectoria de la herramienta.
Causa : Se intento regresar una entrada que es controlada por el sistema.Solución: No se puede regresar X128-X125
145 ILLEGAL OERATION:Operación ilegal.
Causa : Se intento realizar una operación ilegal. Esto es normalmente por probar ocambiar un password que protege un parámetro.Solución: Complete este requisito para completar la operación.
146 CHANFER LENGTH TOO LARGEEl tamaño del chaflán es muy grande
Causa: A sido programado un chaflán que excedió la longitud de la entidad que fuetomada en cuenta.Solución: examine y corrija la geometría.
147 COMPUTER SPEED IS TOO SLOWLa velocidad de la computadora es muy baja
Causa: Tiempo normal permitido por el sistema por carga excedida.Solución: Utilice una computadora mas rápida. Utilizando una computadora mas rápidaverifique que todos los marcos sean correctos.
148 DELETE IS NOT ALLOWED ON CURRENT LOADED PROGRAMNo se permite borra el programa actualmente cargadoCausa : se intento borrar un programa que esta actualmente corriendo dentro del sistema.Solución: cargue en el sistema un programa diferente (i.e descargue el programa actual) yborre el programa seleccionado.
149 SPINDLE SPEED CALIBRATION FAILUREFallo la calibración de velocidad del Husillo
Causa : La zona de rango automático detecta durante la operación zero return unValor invalido (DM 1007)Solución : intente nuevamente esta operación. Si falla verifique el encoder del husillo yuna las conexiones o verifique el rango de los parámetros registrados de Alta / Baja, poruso de parámetros.
150 NOTHING MARKED FOR COPYNada pudo seleccionarse para copiar.
Causa : Se intento copiar datos que no fueron seleccionados.Solución : Use MARK para seleccionar los datos y poder copiarlos.
151 NC LINE LENGTH EXCESIVELongitud de línea NC excesiva
Causa : Un comando NC detecto que se a excedido el numero de caracteres de queespecifica el sistema.Solución : Examine el programa y divida los caracteres en dos comandos.
- 71 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 72/102
MANUAL DE PROGRAMACIÓNDYNA 4M
152 MAXIMUM NUMBER OF PROGRAMS EXCEEDEDSe excedió el numero máximo de programas.causa : El numero máximo de programas NC de acuerdo a las especificaciones del
control a sido excedido.Solución : Reducir el numero de programas NC.
153 ILLEGAL PROGRAM NAMENombre de programa ilegal
Causa : Se ha designado a un programa un nombre invalido para las especificacionesdesignadas por DOS .Solución : Examine el nombre del programa y verifíquelo.
154 DATA IS GREAT THAN MAXIMUM LIMITLos datos exceden el limite máximo.
Causa : Los registrados han excedido el valor máximo de capacidad permitida en elsistema.Solución : verifique en el manual la definición correcta para determinar el valor correcto.
155 DATA IS LESS THAN MINIMUM LIMITCausa : Los datos registrados son mas pequeños que el valor minimo permitido en losvalores del sistema.Solución : Verifique en el manual la definición correcta para determinar el valor correcto.
156 ILLEGAL PASSWORDCausa : La contraseña registrada es incorrectaSolución : introduzca la contraseña correcta.
157 DWELL TIME EXCESIVECausa : La cantidad de tiempo especificada por el comando G04 excedido lasespecificaciones del sistemaSolución : Reducir el tiempo de espera especificado. Si es necesario agregue uncomando adicional de espera
158 MACHINE LOCK ACTIVED- simulation prohibitedCausa : Fue seleccionada una simulación mientras la maquina estaba activada .Solución : Estas soluciones están en el sistema. Cancele l la simulación o desactive lamaquina.
159 UNDEFINED CURSOR TYPETipo de cursor indefinido.
Causa : Un parámetro invalido fue designado durante un procedimiento en la ventana.Solución: Verifique las especificaciones.
160 COMUNICATION RECEIVING OVER RUN, CHECK HANDSHAKING SIGNAL AND PROTOCOL.Sobrecargo de comunicación recibida, verifique la señal de protocolo hadshaking.Causa : Pueden ser la velocidad de transmisión, datos de Bits, paro de Bits o el tipo deHANDSHAKING. No coincide el control o la PC.
- 72 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 73/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Verifique la configuración Si no es correcto incremente el parámetro SCANINGTIME .
161 COMUNICATION CEVIVING BUFFER OVERFLOW:
Comunicación recibida del buffer, Saturada.Causa : los datos que se están reexhibiendo, han excedido la cantidad máxima que elbuffer permite por el tipo de Hadshaking.Solución : Verifique el tipo de Hadshaking (RTS/CTS, XON, XOFF) y los cable decomunicación.
163 ABOVE SYSTEM PARAMETERS ARE NOT DEFAUL!Estos valores no son los parámetros predeterminados del sistema.
Causa . Se izo una modificación en el sistema de parámetros el cual no corresponde alos valores predeterminados.Solución : verifique que el cambio sea el adecuado para el sistema.
164 UNABLE TO LOAD FROM THE FLOPPY DRIVE.No se puede cargar desde la unidad de 3 ½ Floppy.
Causa : L unidad de 3 ½ floppy no responde.Solución : El nombre del archivo puede tener un máximo de 8 caracteres seguidos poruna extensión con un máximo de 3 caracteres.+
165 ILLEGAL FILE NAMENombre Ilegal del archivo.
Causa : Un nombre ilegal para un archivo DOS fue especificado.Solución : Asegúrese de que el diskette este insertado. Si aun así no responde verifiquelas conexiones.
166 WAIT AND SKIP COMMAND BYPASSED IN SIMULATIONEspere o deshaga el comando de simulación.
Causa . Un comando DWEEL apareció un programa NC durante la simulación.Solución : Esta es solo información. E la paro no fue ejecutado por un tiempo guardado.
167 NO MORE PAGE IN THIS WINDOW.No mas paginas en esta ventana.
Causa . El final de la pagina en los parámetros seleccionados ha sido alcanzada.Solución : Presione la tecla PAGE UP para ir a la pagina previa .
168 PROBING FAILURE, TRY AGAIN,!Fallo en la prueba de señal, Pruebe una vez mas.
Causa . La señal de prueba no fue recibida dentro de dentro de la distancia de manejopor los parámetros del usuario.Solución . Verifique si esta funcionando la prueba. Si esta funcionando incremente elparámetro de prueba.
169 SPINDLE PULLEY CHANGE DETECTED.Se detecto un cambio de polea del husillo.
Causa . El sistema detecto en el husillo no coincide con el husillo programado.
- 73 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 74/102
MANUAL DE PROGRAMACIÓNDYNA 4M
170 UNDEFINED NC CODE DETECTED.Se detecto un código NC indefinido.
Causa .Se verifico que no existe un código NC durante la revisión de sintaxis.
Solución: Verifique que la programación sea correcta.171 THE PARAMETER WHITH ‘-’ MUST BE INPUT
Los parámetros entre ‘-’ deben de estar dentroCausa : Es necesario un parámetro para realizar una operación.Solución . Introduzca el parámetro faltante. Tome en cuenta el manual de programaciónmanual de ser necesario.
173 IF GRAMAR ERROerror de gramática en IFF (Si condicional.)
causa . El formato para el comando IF fue definido incorrectamente.Solución . corrija el formato. Tome en cuenta el manual de programación manual de sernecesario.
175 PLEASE COPY BEFORE PASTINGDebe copiar antes de pegar.
Causa. Se intento pegar una información aunque los datos no están contenidos dentrodel buffer.Solución. Seleccione el texto que se va a copiar para poder realizar esta operación.
176 CNC IN SIMULATION MODE !En el modo de simulación CNC !
Este mensaje es solo una información proporcionada como aviso al usuario.
177 CNC SYSTEM RESTART !Restaurar el sistema CNC
Este mensaje es proporcionado por el sistema para avisar al usuario que el sistema serárestaurado.
178 NO NC PROGRAM SELECTED.No hay programa NC seleccionado
Causa . fue requerida una operación automática aunque no se ha seleccionado unprograma NC.
180 EMERGENCY RELEASEDEmergencia !
Esta es solo una información proporcionada para avisar al que un paro ha sidorealizado.
182 EXCESSIVE DATA MARKED FOR MEMORYSe excedió el numero de datos seleccionado por la memoria.
Causa . Es una cantidad de datos que excede el tamaño del buffer, estos fueroseleccionado para borrarse o copiarse.Solución. Divida la cantidad de líneas seleccionadas en dos operaciones .
- 74 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 75/102
MANUAL DE PROGRAMACIÓNDYNA 4M
183 UNDEFINED G/M CODECódigos G/M indefinidos.
Causa . Un código invalido apareció en un programa NC.Solución . Examine el programa y corríjalo.
184 >LINE NUMBER >ALPHA STRING>$DIGITAL STRINGEste mensaje es solo una información proporcionada para avisar que los datos podríanser encontrados.
185 DATA INPUT IS NOT ALLOWED CHANGE IN THE PAGENo se pueden cambiar datos en la pagina
Este es un mensaje de información proporcionado para avisar que la pagina es de sololectura,
186 POINT NUMBER MUST BE .El numero de puntos debe ser :
Causa . Se intento generar un circulo en el modo Teach con solo dos puntos.Solución . Para generar un circulo son necesarios tres puntos coloque el tercer punto.
188 COMUNICATION PROTOCOL ERRORError de comunicación en el protocolo.
Causa . Los datos recibidos no coinciden con la velocidad de transmisión los datos deBits o Bits de parada.Solución . Verifique el de la maquina y la computadora externa.
189 INVALID SERIAL PORT SELECTIONSelección Invalida del Puerto seria.
Causa ]. No existe el Puerto serial requerido.Solución . seleccione el puerto serial correcto.
190 CABLE IN NOT DETECTEDEl cable no fue detectado
Causa . El cable RS-232 no se detecto en el puerto especificado(com 1 o com 2)Solución . verifique las conexiones de la computadora, fuera y dentro del control.
191 WORK-PIECE IS HIGHER THAN HALF LENGTHla pieza de trabajo es del doble de longitud.
Causa : (Solo información) la pieza definida es mas grande que la permitida dentro de lalongitud,Solución . Verifique el tamaño de la pieza de trabajo.
193 PLC IN REVERSE STATUSPLC en Estado Inverso.
Causa . (Información solo para el usuario) un dispositivo a estado en estado inverso alnormal.Solución : Hágalo una vez mas.
194 FEED RATE OVERRIDE PROIBITED DURING CURRENT OPERATION
- 75 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 76/102
MANUAL DE PROGRAMACIÓNDYNA 4M
prohibido sustituir la velocidad de corte durante la actual operación.Causa : fue intentada una operación de velocidad de corte en sobre marcha, cuando laoperación estaba prohibida a por el sistema.Solución : Cambie la velocidad de corte de la operación previa.
195 TIME OVERFLOW, RESET TO 0tiempo saturado, reestablecer en ‘0’
Este es un mensaje es proporcionado por el sistema, el cual advierte que que el sistemaha sido encendido por una cantidad de tiempo que excedio el tiempo del sistema.
196 AUTO MODE IS NOT SELECTEDEl modo auto no fue seleccionado
Causa : Se intento ejecutar un programa cuando no estaba seleccionado el modo AUTO, en el Control Panel.Solución : Seleccione el modo AUTO.
197 UNABLE TO LOCATE DEFAULT PLC FILENo puede localizarse un archivo predeterminado de PLC.
Causa : Se busco un archivo para regresa al PLC a su archivo original, pero el archivono existe.Solución : Cargue este archivo el archivo de PLC de un respaldo y guárdelo nuevamente
198 CNC IN AUTO OVERRIDE MODE !.sustituir en CNC el modo AUTO.
Causa : Este es un mensaje de información de la velocidad de corte que es controladapor medio de un monitor externo o interno, el cual controla la velocidad de corte deacuerdo al husillo instalado.
199 UNABLE TO LOCATE DEFAULT SYSTEM PARAMETER FILE. SET TODEFAULT VALUEno se puede localizar en el sistema el archivo de parámetros predeterminados.Causa : Los parámetros del usuario han sido borrados o están dañados.Solución : Cargar los parámetros predeterminados, hacer los cambio apropiados yguardar los archivos.
200 UNABLE TO LOCATE DEFAULT USER PARAMETER FILE, SET TO DEFAULTVALUENo puede localizarse el archivo de parámetros predeterminados, coloque los valorespredeterminados.Causa: El archivo de los parámetros de usuario a sido borrado o esta dañado.Solución : Cargue los parámetros predeterminados, haga los cambios apropiados yguarde el archivo.
201 CNC IN ANDEL WHEEL DRIVE MODE, TURN ANDLE WHEEL TO RUNPROGRAMCNC en el modo de manejo Andel Wheel, correr un programa de torno en Hand WheelCausa : El movimiento de un eje fue comandado, pero el sistema estaba en el modoHand Wheel.Solución : seleccione el modo Feed.
- 76 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 77/102
MANUAL DE PROGRAMACIÓNDYNA 4M
202 UNABLE TO OPEN USER ERROR DEFINITION FILENo puede abrirse un archivo de definición de errores
Causa : el archivo de error del usuario a sido borrado.
Solución : Vuelva a cargar el archivo ‘’USER_ERR.DAT’’ de un diskette de respaldo.203 USER ERROR DEFINITION MUST BE BETWEEN 600-699
Debe usarse una definición de error dentro de 600-699Causa : Fue llamado un mensaje de error invalido.Solución : Vuelva a cargar el archivo ‘’USER_ERR.DAT’’ de un diskette de respaldo.204 DRIVER INTERRUPT IS TRIGGERED BY OTHERS
el Insterruptor es disparado por otra señal.Esta mensaje de alarma es proporcionada por el oredenador. Esto no es para el usuario.Si esto aparece contacte al deparatamento de servicio.
205 ACTUAL TOOL SETUP MUST BE IN NON SIMU MODE!!!!!Causa: se ha heco una modificacion en la herramienta cuando el sistema estaba en elmod de simulación. Una mensaje advierte que los cambios no seran guardados.Solución: cancele el modo de simulación.
206 RESTART IS CANCELEDLa restauración fue canceladaCAUSA : La operación reiniciar fue cancelada (Información del mensaje)Solución : Nafa fue realizado.
211 LADDER LABEL REPEAT IS NOT ALLOWEDNo es permitido en el diagrama de escalera
Causa : El número de secuencia que aparece en el PLC no es valido.Solución : Corrija el número de secuencia.
212 THE LADER LABEL LOCATION ERROREl diagrama d escalera detecto un error
Causa : Aparece en el PLC un número invalido.Solución: examine las especificaciones y corríjalas.
213 NO CONTAC NODENo hay contacto con el nodo
Causa: el formato del PLC es incorrectoSolución : Examine las especificaciones y corríjalas.
214 UNKNOW PLC OPERATIONoperación PLC desconocidaCausa: La información del PLC no es correcta.Solución: Examine las especificaciones y corríjalas.
215 UNKNOW PLC OPERANDCausa: La información del PLC no es correcta.Solución: Examine las especificaciones y corríjalas
- 77 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 78/102
MANUAL DE PROGRAMACIÓNDYNA 4M
216 DISPOSITIVO DEL PLC DESCONOCIDOCausa : un dispositivo desconocido dentro de los parámetros del sistema fueespecificado.Solución : Examine las especificaciones y corríjalas.
217 LADDER LINE NUMBER OVER FLOWEl número de líneas a saturado el diagrama.
Causa :el número de líneas en el PLC ha excedido el numero máximo de líneaspermitidas en el sistema.Solución : examine el PLC y elimine las líneas innecesarias.
218 PORTOR VARIABLE NUMBER OVER FLOWSaturación de numero de Puerto variable.
Causa : U n dispositivo que no se encuentra en los parámetros del sistema, fueespecificado.Solución: Examine las especificaciones y corríjalas
219 UNABLE TO OPEN USCH LAD FILENo puede localizarse el archivo de diagrama de escalera.
Causa : El archivo requerido no puede ser localizado por el sistema o no existe.Solución: Verifique la existencia de este archivo y su nombre.
220 UNABLE TO LOCATE FILE WHITH THE GIVEN NAME }No se puede localizar un archivo con el nombre dado.
Causa: No se puede encontrar el archivo de PLC especificado, puede ser que no estecargado o no este especificado en el sistema.Solución : Verifique el nombre del archivo.221 THIS FILE ALREADY EXIST
Este archivo ya existeCausa :Se quiso crear un archivo con el mismo nombre de un archivo que ya fue borrado.Solución: Introduzca un nombre diferente.
222 COPY SHOULD BE OUTSIDE THE DEFINED BLOCKLa copia debe ser fuera del bloque definido.
Causa: Se intento pegar una información copiada en donde están localizadas las líneasseleccionadas.Solución : determine la localización exacta para pegar el archivo.
224 THERE IS MORE THAN ONE LADDER LABELEsto es mas que un diagrama de escalera.
Causa: Fue establecido un error de formato durante la recopilación para el PLC. Unalínea aparecerá dos veces.Solución : examine el formato y corríjalo.
225 OUTPUT NODE ARGUMENT ERROR IN THIS LINELa salida del Nodo reporta un error en esta línea.
Causa : Un error de formato fue establecido durante la compilación del PLC.Solución: Examine el formato y corríjalo.
- 78 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 79/102
MANUAL DE PROGRAMACIÓNDYNA 4M
226 THERE IS UNNESESARY LINERExiste una línea innecesaria.
Causa : Se estableció un error de formato durante la compilación del PLC.Solución: Examine el formato y corríjalo
227 THERE IS LACK OF A LINEhace falta una línea.
Causa: Se estableció un error de formato durante la compilación del PLC.Solución: Examine el formato y corríjalo.
228 JMP INSTRUCTION LABEL ERRORError en la instrucción de escalera JMP
Causa : Se estableció un error de formato durante la compilación del PLC. Salto a unalínea no existente.Solución: Examine el formato y corríjalo.
229 LADDER LABEL REPEATRepetir diagrama de escalera
Causa: Se estableció un error en el formato durante la compilación del PLC.Solución : Examine el formato y corríjalo.
230 ERROR FIRST ARGUMENT IN OUTPUT NODEPrimer error en la salida del nodo
Causa : Se estableció un error en el formato durante la compilación del PLC.Solución: Examine el formato y corríjalo.
231 UNEXPECTED BREAK IN LADDERRompimiento inesperado en la escalera,
Causa : Se estableció un error en el formato durante la compilación del PLC.Solución: Examine el formato y corríjalo.
232 OMPROPER PLC DEVICEdispositivo del PLC Inapropiado.
Causa : Se estableció un error en el formato durante la compilación del PLC. Undispositivo no existente.Solución: Examine el formato y corríjalo.
233 PLC: VARIABLES NUMBER OVERFLOWPLC: Saturación del numero de variables.Causa : Se estableció un error en el formato durante la compilación del PLC.Solución: Examine el formato y corríjalo.
235 THE VALUE MUST BE BETWEEN 0-255El valor debe estar entre 0-255
Causa : Se estableció un error en el formato durante la compilación del PLC.Solución: Examine el formato y corríjalo.
236 THIS PAGE IS ONLY FOR TROUBLE SHOOTING!!!!!
- 79 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 80/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Esta pagina es solo para los problemasEste mensaje es solo para proporcionar información.
270 PRESS RESET TO CANCEL CURRENT RUNNING
Presione Reset para cancelar la operación actual.Causa : Se intento realizar una operación , mientras el sistema estaba ejecutando unprograma.Solución : Presione la tecla Reset para cancelar la operación automática.
271 NO START POINT FOR THE FIRST ARCNo puede iniciarse el punto para el primer arco.
Causa: se intento generar un arco pero al inícialo no se especifico el punto de inicio.Solución: seleccione la línea que contenga los primeros para el primer arco seleccionado.
272 THERE IS NO INTERSECTION POINTNo existe intersección en el punto.
Causa: las líneas seleccionadas son paralelas entre si.Solución: Examine la geometría y proceda a generar una intersección.
273 THEM ITEMS ARE SAMELos artículos son los mismos
Causa: Fue seleccionado el mismo articulo dos veces o el articulo seleccionado tienelos mismos parámetros.Solución: examine la geometría y verifique el procedimiento que intento realizar.
274 PARAMETERS ARE NOT ENOUGHLos parámetros no son suficientes
Causa: No son suficientes los parámetros que fueron registrados para generar elresultado que se desea obtener.Solución: Examine el procedimiento y la geometría.
275 THERE IS NOT TANGENT RESULTLos resultados no son tangentes
Causa :Se intento hacer una operación de tangencia pasada la cual tiene una geometríaimposible.Solución: Examine la geometría.
276 PARAMETER ARE NOT ENOUGH FOR FILLET CALCULATIONparámetros insuficientes para realizar el redondeo de una esquina (Filete)
causa: se intento crear un filete pero la información proporcionada no es suficiente pararealizarlo.Solución : examine la geometría e introduzca toda la información necesaria.
277 THERE IS NO FILLET ARC
Causa : No se pudo genera el filete de un arco a causa de una geometría invalida.Solución: examine la geometría y verifique el procedimiento para realizarlocorrectamente.
- 80 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 81/102
MANUAL DE PROGRAMACIÓNDYNA 4M
280 THE ITEM SHOUL BE ONE LINEEl articulo deberían ser una línea.
Causa: Un arco FILLET_L podría realizarse con la función del Contorno.Solución: Seleccione una línea en lugar de un arco.
281: THE ITEM SHOULD BE ONE ARCLos articulo deberían ser un arco
Causa: Un arco FILLET_L podría realizarse con la función del Contorno.Solución: Seleccione una línea en lugar de un arco.
282 CAN NOT ADD NEW ITEMNo puede anexarse un articulo Nuevo.Causa: Se intento anexar el articulo de una geometría pero el máximo numero deartículos ha sido especificado.Solución: Divida la geometría en dos secciones.
283 ILLEGAL INPUT DATAInvalida Introducción de datos.
284 DNC FUNCTION BLOCK NC DOWNLOANDFunción DNC para descargar archivos del block NC.
causa: Se intento utilizar DNC y NC al mismo tiempo.Solución: Use solo un tiempo
285 LASTNC DOWLOAD NOT COMPLETED
Ultimo Mensaje no completadoCausa: Se intento empezar a descargar, pero la descarga previa a esta en proceso.Solución : Presiona la tecla RESET para cancelar la descarga actual.
287 DOWN LOAD PROGRAM IS TOO LARGELa descarga del programa es muy grande
Causa: Esto es por un programa que tiene un tamaño que sobrepasa lasespecificaciones de descarga por RS-232. Excede 1 Megabyte.Solución : Cargue el programa con un disco 3 ½ floppy o divida el programa en dospartes.
289 SORRY! NO SUCH STRINGNo puede localizarse la cadena de caracteres
297 ILLEGAL CHARÁCTERCarácter invalido.
Causa: Fueron establecido caracteres erróneos en el programa NC.Solución : Corrija estos caracteres.
298 TOO MANY LINE IN NC PROGRAM, EDITING FAILURE.!Fallo de edición, Existen Demasiadas líneas en el programa NC.
Causa : El tamaño del programa NC es mas grande del tamaño permitido.
- 81 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 82/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Ya sea que se reduzca la el tamaño del programa NC o incrementar lamemoria para el programa NC (Max. Puede ser 1MB) . Para un programa NC mayor a 10MB, la revisión de líneas debe ser fuera (En una PC comercial)
299 UNABLE TO FIND KEY CODE IN CURRENT PAGENo puede localizarse tecla para el codito en la pagina actual.Causa : Este código solo aparecerá en la pagina designadaSolución :Asegúrese de que el código de la tecla es correcta, defina esto antes de serusado.301 NULL POINTER OPERATION
Funcionamiento de indicador, Nulo.Causa: Puede pasar por varias razones.Solución : Apague el torno, reinicie nuevamente o contacte al departamento de servicio.302 NO ENOUG TEM DISK SPACE
El espacio en el disco no es suficienteCausa : La capacidad que existe en el RAMDRIVE es insuficiente.Solución: Modifique la configuración del archivo SYS para incrementar el tamaño delRAMDRIVE.
303 NO TEMP DISK, CHECK CONFIG .SYS AND AUTOEXEC.BAT. FILENo se puede extender el disco, verifique CONFIG .SYS y el archivo AUTOEXEC.BAT .FILECausa: No se puede extender la memoria del RAMDRIVESolución : Modifique la configuración del archivo Config.sys para cargar RAMDRV
304 WAITING TIME EXCESSIVE, CANCELED BY CNCUtilizando tiempo excesivo, cancelado por CNC.
305 COORDINATE LIMIT TOO LARGEEl limite de la coordenada es demasiado grande
306 NO RECORD BUFFER SPACE
307 FATAL ERROR: STATUS FILE ERRORError fatal: estado, error en el archivo de estado
308 FATAL ERROR: PARAMETER FILE ERRORFatal error: error en el archivo de parámetros.
309 DISK SPACE FULLEspacio de disco lleno.
310 UNABLE TO BUILD RUNING PROGRAMNo se puede construir la estructura del programa.
311 UNABLE TO OPEN ERROR DEFINE FILEno se puede abrir un archivo que tiene un error de finido.
312 UNABLE TO FIND HELP INDEX FILE, BUILD AGAIN
- 82 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 83/102
MANUAL DE PROGRAMACIÓNDYNA 4M
no se puede localizar la ayuda del archivo de la figura,
313 UNABLE TO OPEN TMP HELP LIB FILEno puede abrirse el archivo de ayuda TMP
314 NON ASCII CHAR APPEARS IN NC PROGRAM
315 UNABLE TO OPEN DYN CODE FILENo se puede abrir el archivo de código DYNA
316 UNABLE TO OPEN TOOL PARAMETERS FILE, SET TO DEFAULT VALUE.No puede abrirse el archivo de los parámetros de la herramienta, para colocar valorespredeterminados.Causa : El archivo ‘’4M_TOOL.DAT’’ esta dañado, o desapareció.Solución: reinicie todos los movimientos de la herramienta.
317 UNABLE TO OPEN RUNNING FILENo se puede abrir un archivo para correrlo.
Causa: El sistema no puede localizar el programa actualmente cargado.Solución: Verifique que la trayectoria y el nombre del archivo sea correcto y que el archivono haya sido borrado.
318 TOOL RADIUS TOO LARGE FOR POCKET CYCLEEl radio de la herramienta es demasiado grande para el ciclo de cajeado.
Causa: E radio de la herramienta definida para el ciclo de cajeado, no es la adecuadapara la geometría especificada.Solución: examine el programa y verifique que los datos de la herramienta seancorrectos.
319 NO MEMORY SPACE IN CONVENTIONAL RAMNo hay espacio para memoria convencional en RAM.
Causa: El sistema verificara que menos de 560 KB de la memoria estén disponibles.Solución: verifique los archivos Autoexec.bat o Config.sys para mayor memoriaconvencional, independiente.
320 NON-MOTION INS STACK OVERFLOW IN TOOL RADIUS COMPENSATIONSOBROUTIN
321 FATAL ERROR: MOTION INS BUFER OVERFLOWError fatal: el buffer de instrucciones de movimiento de la maquina esta saturado
322 MOTION INS BUFFER ALWAYS OVERFLOWEl buffer de instrucciones de movimiento siempre esta saturado.
323 FATAL ERROR: STRING LOAD FAILURE COMMON POINTER OVERFLOWerror fatal : No se pudo cargar la cadena de caracteres, debido a la sobrecarga deapuntadores.
324 FATAL ERROR: STRING LOAD FAILURE COMMON BUFFER OVERFLOW
- 83 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 84/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Error fatal: No se pudo cargar la cadena de caracteres, debido a sobrecarga delbuffer común.
326 NO DYSPLAY STRING FILE
No se puede mostrar el archivo de cadena de caracteres.327 COMMON DATA BUFFER OVERFLOW
el buffer común de datos esta sobresaturada
328 COMMON DATA BUFFER OVERFLOWEl buffer de datos esta saturado.
329 NO HELP LIB FILENo se encuentra el archivo de ayuda
Causa : El archivo ‘’4M-HELP.DAT’’ fue eliminado o esta dañado.Solución: Vuelva a cargar el archivo.
330 NO HELP INDEX FILENo se encuentra el índice de ayuda
Causa: El archivo ‘’4M-HELP.DEX’’ fue eliminado o esta dañado.Solución: Vuelva a cargar el archivo.
331 NO PARAMETER FILENo hay parámetros de archivo
332 ICON LIBRARY LOSTIcono desaparecido de la librería.
333 UNABLE TOO FIND SUCH ICONTampoco se puede localizar el icono equivalente.
334 FEED HOLD, MAKE SURE THE CHIP GUARD IS CLOSEDParo Manual, asegúrese de que el chip de guarda este cerrado
Causa: El sistema detecto en el chip de guarda que la puerta esta abierta.Solución: Cierre la puerta o determine si hay un error de hardware.
335 UNABLE TO OPEN PITCH DATA FILENo puede abrirse archivo para insertar datos.Causa : El archivo ‘’4M_USER2.DAT’’ ha sido borrado o esta dañado.Solución: Vuelva a colocar
336 ERROR FOUND IN TOOL RECORD FILEerror al establecer en el archivo de registro de la herramienta
Causa : El archivo ‘’4M_TOOL.DAT’’ ha sido d modificado o esta dañado.337 NO SUCH DRIVER COMAND
No existe tal comando del driver.338 OUT OF VARIABLE RANGE: (#0#100,#500#599)
Fuera del rango de la variable.Causa: Se intento utilizar una variable que el sistema no soporta.
- 84 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 85/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Corrija el programa, utilice una variable que el sistema soporte (#60#100 o#500#599)
339 NO ECHO RECEIVED AFTER SYNC, SIGNAL SENT
No se recibió la señal Eco después de la señal Sync.340 TMP COMMON POINTER OVERFLOW
Saturación de apuntadores TMP .
341 TMP COMMON BUFFER OVERFLOWSaturación del buffer TMP.
342 ERROR DEFINITION FILE LOSTDesapareció el archivo de definición de errores
Causa: El archivo 4M_HELP.DAT’’ no puede ser localizado por el sistema.Solución : Vuelva a cargar el archivo.
343 UNABLE TO OPEN THE GIVEN NC PROGRAMNo se puede abrir el programa NC solicitado.
Causa : El archivo del programa especificado no existe.Solución: Vuelva a cargar el archivo o elija otro programa.
344 UNABLE TO OPEN ANY FILENo se puede abrir ningún archivo.
Causa: La localización especificada en el archivo ‘’4M-STR.DAT’’ del historial deprogramas no existe.Solución: Modifique el archivo ‘’4M-STR.DAT’’ con la localización correcta o vuelva acrear un directorio.
345 NC INDEX FILE BAD
346 NC PROGRAM FILE BADEl archivo de programa NC esta mal.
347 CNC SYSTEM IMPORT FAILUREError al importar archivos en el sistema CNC
348 CNC SYSTEM EXPORT FAILUREError al exportar archivos en el sistema CNC
349 ERROR FATAL: UNABLE TO OPEN CNC STATUS FILE , SET TO DEFAULTVALUE.Error fatal no puede abrirse el estado de archivo CNC, coloque el valor predeterminado.
350 FATAL ERROR: UNABLE TO OPEN CNC FILE, SET TO DEFAULT VALUE.Error fatal: no se puede abrir el archivo CNC , coloque el valor predeterminado.Causa: Uno de los parámetros del archivo a sido borrado o esta dañado.Solución: Coloque los valores predeterminados por el sistema. Modifique los parámetrossegún las preferencias personales.
- 85 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 86/102
MANUAL DE PROGRAMACIÓNDYNA 4M
351 ANG_ CALCULATIOMN FAILUREFallo EL calculo ANG_
352 UNABLE TO FIND SYSTEM MACROFILENo se puede localizar el sistema de Macro archivoCausa: El archivo ‘’4M-SUB.DAT’’ fue borrado o esta dañado.Solución : Vuelva a cargar el archivo ‘’4M-SUB.DAT’’.
353 UNABLE TO OPEN ZM FILE.No se puede abrir el archivo ZM.
Causa: en el lenguaje Chino el archivo ‘’4-ZM.DAT’’ a sido borrado o esta dañado.Solución : vuelva a cargar el archivo.
354 NO SUCH ZM DATANo se puede localizar ZM
Causa: En el lenguaje chino el archivo ‘’4-ZM.DAT’’ a sido borrado.Solución : Vuelva a cargar el archivo.
355 UNABLE TO OPEN HZM FILENo puede abrirse el archivo HZM
Causa: En el lenguaje chino el archivo ‘’4-HZM.DAT’’ a sido borrado.Solución : Vuelva a cargar el archivo
356 NO SUCH HZM DATANo puede abrirse el archivo HZM
Causa: En el lenguaje chino el archivo ‘’4-HZM.DAT’’ a sido borrado.Solución : Vuelva a cargar el archivo
357 NON-MOTION INS BUFFER ALWAYS FULLEl buffer de instrucciones de movimiento siempre esta lleno.
358 LABEL TOO LARGE IN HELP FILETambién la longitud de la etiqueta en el archivo de ayuda.359 NO DISPLAY PAGE DATA FILECausa: El archivo ‘’4M_DISP.DAT’’ ya a sido borrado o esta dañado.Solución: vuelva a cargar el archivo.
360 DRV: FEED!=0 BEFORE NOP INSDRV: Alimentación! =0 antes de la instrucción NOP.
361 DRV : FEED RATE OVERFLOWDRV : Velocidad de corte, saturada.
362 DRV : ACCELERATION OVERFLOWDVR : aceleración saturada.
363 DVR : TOUCH MACHINE LIMIT SWITCH - UPPERDVR: La maquina toco son el limit Switch-superior.
- 86 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 87/102
MANUAL DE PROGRAMACIÓNDYNA 4M
364 DVR : TOUCH MACHINE LIMIT SWITCH – LOWERDVR: La maquina toco son el limit Switch- INFERIOR
365 DVR : POSITION TOLERANCE-OVERFLOW.DVR : Tolerancia de posición –saturada.Causa: Un error de posición a sido detectado.Solución: determine si el error ha sido causado por un defecto del encoder o si el eje hasido atorado.
366 DVR: NO RESPONSE FROM PLCEl PLC no responde
367 DVR: UNKNOW INS RECEIVEDDVR: No conoce la instrucción recibida.
368 DVR: NO V HOME SWITCH FOR SYNC. OPERATION.DVR:
369 DVR: SELF RESET FOR COMUNICATION BREAKDVR:
370 DVR: AMPLIFIER ALARMDVR: Amplificador de alarma
371 DVR: HOME SWITCH ALWAYS TOUCHED, CHEK THE SWITCH AND CABLE.DVR:
372 DVR:HOME CHANGEDOrigen cambiado
373 !!! POWER TURN OFF¡¡¡¡!!!Encendido y apagado del torno¡¡¡
374 EMERGENCY STOPParo DE Emergencia.
375 DVR: SPINDLE ORIENTATION FAILUREDVR:: Fallo en la orientación del husillo
376 DVR: SPINDLE ORIENT POSITION ERRORDVR: Posición errónea de acuerdo a la orientación de husillo.
378 DVR: IN DISABLE SATATE ! (1-X,2-Y,4-Z,8-U,16-V)DVR: Estado, desconectado
379 UNDEFINED DRIVER ERRORError del driver indefinido.
- 87 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 88/102
MANUAL DE PROGRAMACIÓNDYNA 4M
380 PLC: NO RESET BEFORE LOADPLC: No reiniciar antes de cargar.
381 PLC: INS BUFFER OVERFLOW
PLC: Instrucciones del buffer saturadas.382 PLC: ILLEGAL INS CODE
PLC: Código de instrucción ilegal.
384 PLC: VARIABLE NUMBER OVERFLOWPLC: Numero de variables saturado.
385 PLC: ILLEGAL OPERATORPLC: Operador ilegal
386 ILLEGAL VARIABLE NAMENombre de variable ilegal
387 PLC: ILLEGAL SUB NAMEPLC: Sub nombre ilegal.
388 PLC: DOWNLOAD PROGRAM OVERFLOWPLC: saturación en la descarga del programa.
389 PLC: NO PROGRAM END MARKPLC: No fue determinado el final del programa.
390 PLC: JMP OVERFLOWPLC: Saturación JMP
391 PLC: KEYPAD SCAN OR COMUINICATION ERRORPLC: Analizador del teclado o error de comunicación
392 NO LOAD PROGRAMNo cargo el programa.
397 NO RESPONSE FROM PLCEl PLC no responde
398 PLC : IN RESET STATEPLC: Estado de reinicio.
399 UNDEFINIDED PLC INS CODEInstrucción de coditos indefinidos del PLC.
400 PROGRAM’S SEGMEN > HANDLELíneas del programa >Manejo.
401 PROGRAM SIZE TOO LARGE, USE DNC MODE PLEASE.El tamaño del programa es demasiado grande, por favor utilice el modo DND
- 88 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 89/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Causa : Se intento ejecutar un programa, que tenia un tamaño que excedia lasespecificaciones del sistema.Solución: Ejecute el programa en el modo interno DNC.
402 THE USER G CODE IS NOT DEFINED, GEl uso de códigos G no esta definido, G.Causa : Un código G existe en un programa NC, este no es soportado por el sistema.Solución : Examine el programa y corríjalo.
403 USER M CODE IS NOT DEFINED, MEl uso de códigos M no esta definido, M.
Causa : Existe un código M en un programa NC, el cual no esta definido dentro delsistema o el uso de la definición del archivo.Solución: Examine el programa o define el código M, como el uso del código M.
404 DATA IS GREAT THAN MAXIMUM LIMITLos datos son mas grandes que el limite máximo.
405 EXPRESSION ERRORError de expresión.
406 SUBROUTINE OR LABEL IS NOT DEFINEDSubrutina de escalera no definida.
Causa : Un numero de línea invalida a sido llamado con un documento GOTO o unasub-rutina.Solución: Verifique el programa NC.
407 DATA IS LESS THAN MIN LIMITEl numero de datos, es menor al limite mínimo.
408 PARAMETERS DO NOT MATCH, SEE DEFINITION.Los parámetros no fueron divididos., ver la definición.
409 FEED RATE TOO SMALLVelocidad de corte, bajo.
Causa: un movimiento comandado ha sido utilizado con una velocidad de corte de ‘‘0’’Solución : verifique el programa o coloque los valores predeterminados en el parámetrode corte manual.
410 DNC COMUNICATION BREAKComunicación DNC interrumpida
411 TOO MANY CODE ITEM IN ONE LINENingún código de articulo en una línea.
412 INPUT LINE LONGER 80 CHARACTERESIntroducir línea grande de 80 caracteres.
Causa : El numero de caracteres en un comando NC rebasan el limite máximo permitidoen el sistema.(80).
- 89 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 90/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Divida el comando en dos comandos separados.
413 TOO MANY SUBROUTINE NEST.Muchas subrutinas anidadas
414 TO MANY SUBRUTINE ENDMuchas EDN en subrutinas
415 TO MANY REPEAT NESTMuchas repeticiones anidadas.
416 TO MANY REPEAT ENDMuchas repeticiones de END.
417 UNKNOW NC CODENo se conoce el código NC.
418 UNABLE TO CREATE SWAP FILE, check hard disk status.Se intento crear un archivo para cambiarlo, verifique el Estado del disco duro.419 DRIVER COMUNICATION BREAK ONE SECOND
La comunicación con el driver se interrumpió por un Segundo.
420 COORDINATE NUMBER OUT OF EFFECTIVE RANGECoordinación de números fuera del rango efectivo.
421 CNC_DVR COMUNICATION ERROR, CHECK CABLE AND DRAMError en la comunicación CNC_DVR, verifique el cable y el DRAM.
422 UNABLE TO FIND SUCH TOOL.No puede encontrarse la herramienta equivalente.
Causa: El numero de herramienta llamado excede el numero máximo de herramientasdefinidas por los parámetros.Solución Verifique el programa NC.
423 UNABLE TO FIND EMPTY TOOL POSITION.No se puede encontrara la posición de la herramienta.
424 UNKNOW INNER CODENo se conoce el código interior.
425 CYCLE BUFFER OVERFLOWCiclo del buffer saturado.
426 PARAMETER (#_) OUT RANGEParámetro fuera del rango.
427 SCALE FACTOR OUT OF (0.1-10)Factor de escala, fuera de (0.1-10)
Causa : Una factor de escala programado, el cual esta fuera de la especificaciones deescala del sistema.
- 90 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 91/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Examine el programa, utilizando una escala entre el valor mínimo que es 10%de la dimensión programada y 10 tiempos de dimensión programada.
428 GOTO, CALL AND REPEAT is not allowed in DNC mode
GOTO, CALL AND REPEAT No son permitido dentro de DNC.Causa: desde que el modo DNC no tiene registro de datos en la memoria allí no sepermite ningún programa anidado, ni ningún tipo de repeticiones.Solución: Reestructure el programa NC.
429 DNC PROGRAM CAN´T CALL DNC AGAINUn programa DNC no puede llamar a otro programa DNC
Causa : Se llamo a un programa DNC, para ejecutarlo en el modo DNC.Solución: Reestructure el programa NC.
430 SPINDLE SPEED CALIBRATION FAILURE, CHECK DRIVER INTERRUPTSIGNAL.Fallo la calibración de la velocidad del husillo, verifique la señal de interrupción delDriver.
431 SPINDLE SPEED TOO SLOWVelocidad del husillo muy lenta
432 NC DOWLOAD BLOCK DNC FUNCTIONDescarga del bloque NC función DNC
433 SELECT HIGHER PULLEY OR LOWER DOWN SPINDLE OVERRIDE.Seleccione la polea superior o sustitúyalo por el husillo de abajo.
Causa: La velocidad del Husillo que fue programada sobrepasa la velocidad máxima d edel rango actual.Solución: programe con una velocidad mas baja o cambie el rango del velocidad delhusillo.
434 CURRENT TOOL LIFE AXHAUSTSLa herramienta actual a terminado su tiempo de vida útil.
Causa: El tiempo de vida útil que fue colocado dentro de los parámetros TOOL LIFEWARNING, termino y esta siendo excedido.Solución : Cambie la herramienta, Incremente la cantidad de tiempo o deshabilite losparámetros Tool Life Warning.
435 SYSTEM WARNING ¡Sistema de advertencia.
436 ILLEGAL DISK!Disco Ilegal
437 SPEED I GREATER THAN LIMITLa velocidad es mayor que el limite.
Causa: la velocidad del Husillo es mayor al limite del sistema, o la sobre marcha delhusillo que fue especificado a excedido las especificaciones.Solución: Examine el programa o verifique la posición de sobremarcha del husillo.
- 91 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 92/102
MANUAL DE PROGRAMACIÓNDYNA 4M
438 ILLEGAL CHANGE IN SYSTEM IS DETECTED!!!!!El sistema detecto un cambio ilegal
439 SUBROUTINE WITHOT ENDsubrutina sin terminarcausa: Se llamo a una subrutina, misma que no contiene un comando M99.Solución: Examine EL programa.
440 ZERO RETURN FAILURE, NO RESPONSE FROM HOME TOUCHFallo el regreso a cero, No responde Home Touch
Causa: El sistema no ha recibido ninguna señal para regresar a la posición Home dellimite del switchSolución: Verifique el cable, las conexiones y el Limit Switch
441 THE FUNCTION IS NOT AVAILABLELa función no esta disponible
442 BOTTON OF HOLE HIGHER THAN R PARAMETERLa parte superior del barreno es mas alto que el parámetro R
443 SPINDLE GEAR BOX STAYS IN WRONG POSITION
444 ENCODER READING ERRORError en la lectura del encoder
Causa : el numero actual de pulsos del encoder no es lo necesario para regresar el allimit Switch a posición Home.Solución : Verifique la conexión de los cables, los parámetros (AXIS DLT), y el cable,reemplace el encodeer si es necesario.
453 UNDEFINED POCKET CYCLE CODECódigo indefinido del ciclo de cajeado.
455 ERROR! NOT CIRCLEError ! Circulo NOCausa: Es el resultado de aver priogramado u entidades que realizau un circulo.Solución: Examine el programa.
456 CNC: FEED RATE OVERFLOWCNC: Velocidad de corte saturada
457 CNC: ACELERATION OVERFLOW, CHECK PRECISION IN USER PARAMETERPAGECNC: aceleración saturada, verifique la preescisión en pagina de parámetros del usuario
458 OVER-TRAVEL SOFT LIMIT REACHED IN THE POSITIVE DIRECTION.Un eje rebaso los limites en dirección positiva.
- 92 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 93/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Causa: Los ejes X, Y, Z, O 4th han rebasado el limite registrado en el sistema deparámetros.Solución : Mueva a los ejes dentro del rango de movimiento permitido.NOTA: El valor estará dentro de un paréntesis seguido de una alarma. Esta designado el
eje en cuestión. Un (1) es el eje X, (2) es el eje Y, (4) es el eje Z .459 OVER-TRAVEL SOFT LIMIT REACHED IN THE NEGATIVE DIRECTION
Un eje rebaso los limites en dirección negativa.Causa: Los ejes X, Y, Z, O 4th han rebasado el limite registrado en el sistema deparámetros.Solución : Mueva a los ejes dentro del rango de movimiento permitido.NOTA: El valor estará dentro de un paréntesis seguido de una alarma. Esta designado eleje en cuestión. Un (1) es el eje X, (2) es el eje Y, (4) es el eje Z .
460 TOUCH USER DEFINED Y TRAVEL LIMITToco el limite definido por el usuarioCausa : Los ejes X, Y, Z ó 4th rebasaron los limites registrados en los parámetrosdel usuario.Solución : Mueva los ejes dentro del rango colocado por el usuario.NOTA: El valor estará dentro de un paréntesis seguido de una alarma. Esta designado eleje en cuestión. Un (1) es el eje X, (2) es el eje Y, (4) es el eje Z .
461 CNC: CNC_DRV DRAM DATA BUS ERRORCNC: Error de datos del Bus CNC_DRV DRAM
462 CNC: CNC_DRV DRAM ADDRESS BUSS ERRORCNC: Error en la dirección del Bus CNC_DRV DRAM
463 CNC : SPINDLE ORIENTATION FAILURE.CNC: Fallo en la orientación del Husillo
464 CNC: SPINDLE ORIENTATION POSITION ERRORCNC: Error en la orientación de posición del Husillo
466 CNC: NO RESPONCE FROM DRIVECNC: No responde el Drive
470 !!! TMT: TASK STACK OVERFLOW:!!! TMT: Saturación de tareas.
471 !!! TMT: TASK NUMBER OVERFLOW:!!! TMT: Saturación del numero de tareas.
472 !!! TMT: WHOLE TASK STAC OVERFLOW:!!! TMT: Completa saturación de tareas
473 !!! TMT: TASK IS NOT REGISTER!!! TMT: Tareas no registradas.
- 93 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 94/102
MANUAL DE PROGRAMACIÓNDYNA 4M
474 !!! TMT: PROGRAM EXIT ACCIDENTALLY FROM TASK!!! TMT: El programa accidentalmente salió de la tarea programada.
475 !!! TMT: TASK INDEX ERROR
!!! TMT: Error en el índice de tareas.491 CPU INTERRUPT ERROR: 0 DIVIDE OR OVERFLOW
Error al interrumpir el CPU : dividido o saturación:
492 FLOPPY DISK ACCESS FAILUREFallo el acceso a la unidad de 31/2
Causa: El sistema no puede tener acceso ala unidad de 31/2Solución: asegúrese de que el diskette este cargado. Si esta cargado, verifique lasconexiones de los cables.
493 UNKNOW UNITSe desconocen las unidades.
494 DRIVER NOT READYNo esta el controlador.
495 UNKNOW COMMANDNo se conoce el comando
496 UNKNOW DATA WRITE ERRORError, se desconocen los datos escritos.
Causa: Falla en la escritura del archivo del disco de 31/2Solución: Verifique el Diskette no este protegido contra escritura.
497 BAD DRIVER STRUCTURE.Mala estructura del Driver.
498 UNABLE TOO SEEK FILE DATANo puede buscarse el archivo de datos.
499 UNKNOW DISK MEDIA TYPENo se conoce el disco de tipo media
Causa: No se puede localizar el drive del disco de 31/2 .Solución: Repare o reemplace el diskette.
500 SECTOR NOT FOUNDSector No establecido
Causa: El diskette utilizado esta dañado o el drive dl Floppy esta desajustado.Solución : Intente con diskette diferente.
501 PRINTER OUT OF PAPERLa impresora no tiene papel.
Causa: El control a recibido la señal de la impresora, que no tien papel.Solución : Vuelva a abastecer de papel a la impresora correctamente.
- 94 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 95/102
MANUAL DE PROGRAMACIÓNDYNA 4M
502 WRITE FAULTEscritura predeterminada.
Causa: La unidad de 3 ½ Floppy o el disco duro no permiten la escritura de datos.
Verifique que el disco de 31/2 Floppy no este protegido contra escritura y si el discoduro corre SCANDISK.
503 READ FAULTLectura predeterminada.
Causa: El disco de 31/2 floppy o el disco duro no puede comunicarse.Solución : Verifique los datos del disco de 31/2 floppy en otra PC. Si el disco duropuede leer el al disco de 31/2 floppy y correr el SCANDISK.
504 GENERAL FAILUREFallas generales.Causa: el disco de 31/2 floppy o el disco duro no puede comunicarse.Solución: Pruebe el disco en otra PC. Si el disco duro puede inicializar de un disco de31/2 floppy y correr SCANDISK.
505 MAKE SURE THE TOOL IS CORRECT. Asegúrese de que la herramienta es la correcta.
599 LAST SYSTEM ERROR DEFINITION ITEMError en la ultima definición del articulo del sistema.
600 USER ERROR DEFINITION ITEMError del usuario al definir un articulo.
600 USER DEFINE ERROR 0Error DEL usuario al definir un 0
601 PLEASE GO HOME BEFORE CYCLE START AND MDIPor favor regrese a Home antes de Iniciar el ciclo (CYCLE START) y MDI
Causa : Una operación automática antes de la operación Zero Return.Solución : Lleve a cavo la operación de Zero Return (Regreso a cero.)
602 FEED RATE OVERRIDE IS NOT ALLOWED RIGHT NOWNo se permitió sustituir la velocidad de corte porque no es correcto ahora.
Causa : Se quiso cambiar la sobre marcha de velocidad de corte durante una operación.Cuando esto es detectado por el sistema es bloqueado por el software o un macroSolución: Modifique el programa NC incluyendo la velocidad de corte designada.
603 MOVE Z AXIS DOWN BEFORE GO HOMEMover al eje X antes de ir a home.
Causa : Se intento realizar la operación de Zero Return aunque el eje Z estaba haciendocontacto con el Limit Switch.Solución: Verifique la operación del limit Switch. Si el eje (x27)esta muy por debajo delSwitch
604 SPINDLE UNDER VOLTAGE
- 95 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 96/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Bajo Voltaje en el HusilloCausa: El control ha recibido una señal del Drive del husillo que indica que el voltaje esmuy bajo.Solución: verifique la condición del Voltaje. Si el voltaje es el correcto, verifique las
conexiones.605 SPINDLE DOES NO RESPONSE.
EL Husillo no responde.
606 SPINDLE STILL LOCK (NO UNLOCK SIGNAL X47)El husillo aun esta sujetando a la pieza( No hay señal de liberación X47)
Causa: el Control no ha recibido la señal del Limit Switch de liberación de la herramientaSolución. Verifique la operación del Limit Switch y asegúrelo.
607 NO CAROUSEL BACK SIGNAL (X44), CHECK AIR PRESSURE ANDCAROUSEL SENSORNo existe la señal de retroceso (X44), Verifique la presión del aire y el sensor delcarrusel.Causa: El control no ha recibido una señal para que el carrusel de la herramienta regresea la posición Home.Solución : verifique la operación del Limit Sitch del carrusel y asegúrelo.
608 NO CAROUSEL ENTER SIGNAL (X44), CHECK AIR PRESSURE ANDCAROUSEL SENSOR
No se recibió la señal de entrada (X44), verifique la presión del aire y el sensordel carrusel.Causa : el control no ha recibido la señal para que el carrusel de la herramientaque esta localizada en el husillo.Solución: verifique la operación del Limit Swich del carrusel y asegúrelo.
609 SPINDLE ORIENTATION ERROR (X43). CHECK SPDL ORIENTATIONSENSOR.
Error en la orientación del Husillo (x43). Verifique el sensor de operación SPDL.Causa : El control no ha recibido una señal de orientación del sensor magnético.Solución: Verifique la operación del sensor y asegúrelo.
610 CHECK ALARM NO. ON SPINDLE DRIVE UNIT. RESTART SYSTEM IF THEREIS NO ALARM.
Verifique la alarma No. X en la unidad del Spindle Drive, si no hay alarma reinicieel sistema.Causa : No existe retroalimentación recibida por el motor del husillo por el motorDel encoder.Solución: Verifique el cableado y las conexiones.
611 SPDL AL 46: MOTOR OVERHEATSPDL AL 46: Sobrecalentamiento del motor.Causa: Una señal de sobrecalentamiento del motor ha sido recibida por el drivedel control del husillo.
- 96 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 97/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución : Verifique las condiciones existentes. Si no, verifique el cableado y lasconexiones.
612 SPDL AL 23: EXCESSIVE SPEED DEFLECTION
SPDL AL 23: Deflexión excesiva del husillo.Causa : una señal de deflexión excesiva del de velocidad ha sido recibida por el drivedel control del sistema.Solución: verifique la operación del encoder del Husillo, verifique el cableado y lasconexiones. Si el error existe en el manejo manual del Husillo.
613 SPDL AL 31 : OVER-SPEED.SPDL AL 31 :alta-Velocidad
Causa. Una señal del motor, de alta velocidad fue recibida por el control del drive delhusillo.Solución: Verifique las condiciones, si no es eso verifique el cableado y las conexiones, siexiste un error vea el manual.
614 SPDL AL 32 : OVER - CURRENTSPDL AL 32 : OSBRE - CORRIENTE
Causa: El motor a recibido una señal de sobrecalentamiento recivida por el drive delhusillo.Solución: verifique las condiciones existentes. También, verifique el cableado y lasconexiones.
615 SPDL AL 50 : OVERLOADSPDL AL 32 :Sobrecarga
Causa : Existe una señal de sobrecalentamiento del motor recibida por el del husillo.Solución: verifique la condiciones existentes. También, verifique el cableado y lasconexiones.
616 SPDL AL E7 : EMERGENCY STOPSPDL AL E7: Paro de emergencia.
Causa: El control a recibido una señal del drive del Husillo de condiciones de E-Stop.Solución: verifique la condiciones existentes. También, verifique el cableado y lasconexiones.
617 SPDL AL 10-5F
618 SPDL AL 61 : POWER MODULE ERRORSPDL AL 61 : Error en el modulo de poder
Causa : El Modulo de Poder a recibido una señal de del c enviada por el drive delHusillo.Solución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive..
619 SPDL AL 67: OPEN PHASE DETECTIONSPDL AL 67: Detección de fase abierta
- 97 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 98/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Causa : Se ha detectado que una fase esta abierta recibida por el drive del husillo.Solución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive.
620 SPDL AL 69: GROUND FAULT ERRORSPDL AL 69: Se detecto una falla de tierra
Causa: Se detecto una señal de falla de tierra la cual fue recibida por el Spindle DriveSolución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive.
621 SPDL AL 6C : MAIN CIRCUIT ERRORSPDL AL 6C: error en el circuito principal.
Causa : Una señal de error en el circuito principal, fue recibida por el control del SpindleSolución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive.
622 SPDL AL71: INSTANTANEUS POWER FAILURE/ EXTERNAL EMG. STOPSPDL AL71 : Fallo en el poder instantáneo/ externo EMG. Paro.
Causa : Una señal externa de paro de emergencia fue recibida por el Spindle DriveSolución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive.
623 SPDL AL 75 : OVER – VOLTAGESPDL AL 75 . Sobre voltaje.
Causa : una señal de sobre-velocidad dl motor fue recibida por el control del SpindleDriveSolución : Verifique que las condiciones existen en el Spindle Drive. Verifique elcableado y las conexiones. Si existe un error tome como referencia el manual delSpindle Drive.
624 SPDL AL 82 : NO COMUNICATION SIGNALSPDL AL 82 :No hay señal de comunicación.
Causa : El sistema NC no ha recibido ninguna señal del Spindle Drive.Solución : verifique el poder en el Spindle Drive, cableado y conexiones.
625 RESTART CNC SYSTEM IF THERE IS NO SPDL ALARMRestaure el sistema CNC si no existe una alarma en SPDL
Causa: El sistema NC ha recibido una alarma indefinida por el Spindle Drive.Solución. Verifique la alarma y el Spindle Drive
626 POWER OVER VOLTAGESobrevoltaje en el poderCausa . ha sido detectado condiciones de sobrevoltaje en la tarjeta madre (Big MotherBoard)Solución: Verifique la entrada de voltaje en la esquina inferior izquierda de la tarjeta.
- 98 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 99/102
MANUAL DE PROGRAMACIÓNDYNA 4M
627 POWER UNDER - VOLTAGEBajo voltaje en el poder.
Causa . ha sido detectado condiciones de bajo voltaje en la tarjeta madre (Big Mother
Board)Solución: Verifique la entrada de voltaje en la esquina inferior izquierda de la tarjeta.
628 SPINDLE SHUNT FUSE BLOWNse ha fundido un fusible del husillo
Causa : El control detecto que el fusible en el regulador del husillo esta quemadoSolución verifique la condiciones, si el fusible no esta quemado, revise los cables y lasconexiones.
629 AXIS SHUNT FUSE BLOWNCausa :el control ha detectado que el fusible en el regulador de los ejes esta quemado.Solución verifique la condiciones, si el fusible no esta quemado, revise los cables y lasconexiones
630 AXIS CIRCUIT BREAK STRIPInterrupción del Circuito del eje
Causa : El interruptor del circuito del distribuido de poder esta en oposición OFF.Solución : Reinicie el circuito abierto. Si esto sucede nuevamente
631 SPINDLE CIRCUIT BREAK STRIPInterrupción del circuito del Husillo
Causa : El circuito esta abierto por el drive del Husillo esta en la posición OFF.Solución : receté el breaker del circuito. Si esto sucede nuevamente, localice la causa delproblema.
632 !!!!POWER WILL BE OFF!!!!poder estará en off
633SELECT AUTO MODE BEFORE CYCLE STARTSeleccione el modo AUTO antes de iniciar el ciclo.
Causa : la tecla Cycle Start fue presionado cuando el sistema no estaba en el modo AUTO.Solución : seleccione le modo AUTO.
634 CLOSE DOOR BEFORE CYCLE STARTCierre la puerta antes de iniciar el ciclo.
Causa . La tecla CYCLE START fue presionada pero el control que la puerta deprotección esta abierta .Solución : Cierre la guarda. Si esta cerrada, verifique el switch, cableado y lasconexiones.
635 RAPID IS NOT ALLOWED WHEN DOOR IS OPENUN Movimiento rápido no es permitido cuando la puerta esta abierta.
Causa . se intento realizar un movimiento rápido pero el sensor detecto que la puerta deprotección esta abierta.
- 99 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 100/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Cierre la puerta de seguridad. Si esta cerrada verifique el Switch, cableado ylas conexiones.
636 CAROUSEL MUST AWAI FROM SPDL BEFORE RUNSPDL & TOOL (OR
CHECK SW X44)El carrusel del Husillo debe estar fuera de SPDL antes de correr el SPDL & TOOL( O verifique SW X44)Causa : El control recibió señal de que el carrusel esta localizada en el Husillo.Solución : presione RESET para retractar el carrusel.Si esta retractado, verifique el Switch, el cableado y las conexiones.
637 SPINDLE STILL UNLOCK (CHECK LOCK- SW X46)El husillo todavía no esta asegurado.
Causa . se intento realizar una operación pero el control detecto que el Draw Bar estaabierto.Solución : Verifique el limite justo, el cableado y las conexiones.
638 LUBE OIL PRESSURE IS TOO LOW DURING PUMP RUNNIGVerifique el sistema lubricación.
639 MACHINE IS LOCKED , PRESS MACH LOCK TO CANCEL.La maquina esta abierta, presione Match Loock para cancelar.
Causa : Se intento realizar un procedimiento automático cuando MACHINE LOCK estabadesactivado.Solución :Active MACHINE LOCK .
640 AIR PRESSURE OR LUBE OIL LEVEL IS TOO LOWLa presión del aire o el nivel de aceite esta bajo.
Causa : El control detecto que la presión del aire o el nivel de aceite también esta bajo.Solución : Verifique la presión del aire y el nivel de aceite , si esta bien verifique loscables y las conexiones.
641 DON´T ALLOW RUN CAROUSEL BY MANUAL DURING TOOL CHANGE.No se permite mover el carrusel en el modo manual mientras se esta cambiando laherramienta.Causa : se intento rotar el carrusel durante un cambio automático de herramienta.Solución : No lo vuelva a intentar.
642 DON´T ALLOW RUN SPINDLE IF TOOL DOESN’T LOCK (OR CHECK SW X46)No se puede mover el spindle si la herramienta no esta sujeta. (Verifique SW
X46)Causa : se intento realizar una operación pero el control detecto que el Draw Bar estaabierto.Solución: Verifique el limit Switch, el cableado y las conexiones.
643 GEAR CHANGE IS NOT COMPLETED IN 2 SECONDSEl cambio de engrane no es completado en 2 segundos.
Causa : El control no ha recibido la señal de confirmación del cambio de engranedurante el tiempo permitido.
- 100 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 101/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Solución: Verifique el limit Switch, el cableado y las conexiones.
644 SPINDLE GEAR IS EITHER HIGH NOR LOWCambio del engrane ya sea el de arriba o el de abajo.
Causa . el control no ha recibido una señal de confirmación de cambio de engrane.Solución : verifique los limits Switches, cables y conexiones.
645 DOOR IS NOT LOCKED (CHECK SW OR WIRES I/O X36)La puerta no esta cerrada (Verifique SW o los cables I/O X36)
Causa : el control no ha recibido una señal para que cierre la puerta de seguridad.Solución : si esta cerrada verifique el Switch, cableado y las conexiones.
646 Z AXIS HOME DOESN´T TOUCH Z HOME DOG (CHECK SW X28)El Home del eje Z no toca el limite de home del eje Z.
Causa : El control no ha recibido la señal de limite del eje Z durante el cambio de laherramienta.Solución : Ajuste los parámetros para que coincidan con el eje Z en el sistema deparámetros.
647 CAROUSEL TURN ERROR (CHECK SW OR WIRES I/O X41)error En el carrusel del torno (Verifique SW o los cables de I/O X41)
Causa : El control no ha recibido señal del carrusel (sensor magnético)Solución : verifique la distancia del sensor para el cam, el cable y las conexiones.
648 SPINDLE IS NOT RUNNINGHusillo no esta corriendo.
Causa : El control no ha recibido una señal del encoder del husillo .Solución : verifique el encoder, el cableado y las conexiones.
649 DON´T ALLOW UNLOCK SPDL. DURING AUTO TOOL CHANGE IS CAROUSEL AWAY FROM SPINDLE SIDE.No esta permitido abrir SPDL durante el cambio de herramienta, el carrusel esta fueradel lado del Husillo.Causa : El control no ha recibido la señal para que el carrusel se coloque en estaposición durante el cambio de la herramienta.Solución : verifique el encoder, el cableado y las conexiones.
650 SPINDLE SPEED IS GREAT THEN LIMIT (3000RPM) DURING TAPPING CYCLELa velocidad del Husillo es mucho mas grande que el limite (3000rpm) durante
ciclo Machuelado.Causa . Se intento realizar un machuelado rígido pero la velocidad del husilloexcede las especificaciones del sistema.Solución : Reducir la velocidad en el machuelado programado O cambie elhusillo.
651 CAROUSEL MOTOR DOES RUNEl carrusel del motor no corre.
Causa: Se espero demasiado tiempo para obtener la señal del contador.Solución : Verifique el carrusel del motor cables / conexiones
- 101 -DEPARTAMENTO DE CNC
8/18/2019 Manual de Programacion 4M
http://slidepdf.com/reader/full/manual-de-programacion-4m 102/102
MANUAL DE PROGRAMACIÓNDYNA 4M
Verifique los fusibles o el relevador de la tarjeta del carrusel.Verifique el atascamiento mecánico.Verifique proximidad del Switch en el carrusel.
652 U AXIS IS STILL NOT CAMPLEDEl eje U aun no esta cerrado.Causa . No se ha recibido la señal para cerrar en un tiempo determinado.Solución : Verifique la presión del aire, señal de abrir.
653 U AXIS STILL NOT UNCACLAMPED (U AXIS IS STILL LOCKED)El eje U no ha recibido la señal para abrir (El eje U aun esta cerrado)
Causa : No se ha recibido una señal para abrir en un periodo de tiempo.Solución : Verifique la presión del aire, señal para abrir.
654 AIR PRESSURE IS LOW! CHECK AIR OR WIRES.Presión de aire baja! verifique el aire o los cables.
Causa : Verifique que la presión del aire no este botada.Solución : Verifique la presión del aire y la señal del sensor.
655 LUBRICATION OIL LEVEL IS TOO LOW! CHECK OIL WIRESnivel del aceite de lubricación bajo! Verifique el aceite y los cables.
Causa :Esta activada la señal del sensor del nivel del aceite.Solución: Verifique el nivel de aceite, o el sensor y los cables.