Embed Size (px)
Citation preview

Manipulation of Living Biological Cells: Challenges in Automation
Pasi Kallio and Johana Kuncová
Institute of Automation and Control
Tampere University of Technology, Finland
Abstract. This paper discusses challenges related to the automatic microinjection of single adherentcells. The discussion covers all necessary components of a capillary pressure microinjection system:a micromanipulator, a microinjector, a microcapillary, a vision system and an environment controlsystem. The other part of the paper describes the research performed on the automatic capillarypressure microinjection at the Tampere University of Technology. The advanced microinjectionsystem includes two micromanipulators, a microinjector, a vision system and a cell cultivationsystem. The control system comprises of motion control schemes for the micromanipulators toaccurately position a microcapillary and to precisely penetrate a cell membrane. A measurementsystem for the detection of the capillary-membrane contact, capillary clogging and capillarybreakage is under development. Results of the penetration evaluation show as high successes ratesas 96%. Injection success and cell survival studies are presently on-going.
1 Introduction
In the first phase of the Human Genome Project, the genetic sequence of human DNA wasdetermined and all approximately 30 000 genes were identified. Knowing the genesequence and identification of the genes is not, however, the end of the massive work. Inthe next phases, the functions of each gene will be determined and even further, theproteins and their functions will be identified. Microsystems technology played animportant role in the acceleration of the Human Genome Project. Microsystemstechnology and microrobotics will play an important role, when the functions of thehuman genes are determined. Automatic injection of genes and siRNAs into single cellsand automatic analysis of the cell functions will be an essential part of the functionalgenomics in the future. Micromanipulation techniques for single cells will also have animportant role in such applications as in-vitro toxicology, cancer and HIV research,intracellular injections and transgenics.
Micromanipulation can be performed either by touching the objects physically orwithout a physical contact. The sizes of objects range from about one micrometre to a fewmillimetres and they can be either natural such as biological cells, bacteria, spores, minuteblood vessels and even paper fibres, or artificial such as miniaturised gears, othermechanical parts, electrical and optical components and fabric fibres. In non-contactmanipulation, these objects are manipulated using optic, electric, magnetic or acousticenergy, for example [1], [2], [3], [4]. Non-contact manipulation is an important way ofperforming micromanipulation, but this paper will concentrate only on the contact typemanipulation. Therefore, the term micromanipulation will refer to the contactmicromanipulation in the following sections.
In contact micromanipulation, operations are performed using an end-effector whichis moved in a three-dimensional space by a micromanipulator. The end-effector can be amicrocapillary, a micro gripper or a recording electrode. The tip of the end-effector has tobe small enough to facilitate the handling of minute objects and components.

The trends in many micromanipulation applications suggest that micromanipulationsystems of the future must respond to the following challenges: fast speed, increasedflexibility, high level of automation, large information content and low cost. From themicromanipulator development point of view, this means that the performance of themicromanipulators must be improved, the micromanipulators must be miniaturised, andtheir automation level must be increased. Specifically, the following aspects should beemphasised:
1. Performance. High speed together with high accuracy will be increasingly essential inboth biomedical and microassembly applications. This will partly but not only beachieved by raising the automation level. The speed of micromanipulators must beincreased in the future, but not at the expense of the accuracy and price.
2. Miniaturisation. The size of the micromanipulator has not been considered a criticalfeature so far. More essential for the micromanipulator has been to provide as precisemovements as the micromanipulation task requires. Recently, the need for using multiplemicromanipulators simultaneously under an optical microscope in a limited space hasenhanced the importance of designing miniature sized micromanipulators. In biologicalapplications, several different compounds will be injected and studied simultaneously,cells will be isolated from a cell culture, electrophysiological signals of several cells willbe recorded and cells will be electrically stimulated. In microassembly, severalmicrogrippers, glue dispensers and visualization tools will simultaneously be needed.The trend towards parallel operations necessitates the miniaturisation ofmicromanipulators, but not at the cost of remarkably smaller work space and increasedvibrations.
3. Automation. To reduce the human involvement in tedious micro operations and thus,to free the scientists to concentrate on the analysis of results, the automation level ofmicromanipulation should be increased. This requires (i) a computer-controlledmicromanipulator having high positioning accuracy and repeatability, (ii) thedevelopment of more highly automated micromanipulation, (iii) a careful task planningwhich takes into account the requirements imposed by the automation and the scalingeffect, and (iv) additional measurement information on the interactions between the end-effector and the micro particles. In order to obtain this information from the microworldin real-time, sensors and sensor systems, such as tactile and force sensors and machinevision systems, must further be developed. Increasing the level of automation, alsorequires improvements in the robustness of the system against errors and disturbances.
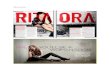
In this paper, the emphasis is on the challenges of automation but issues related to theminiaturisation of micromanipulators are briefly discussed, too. Furthermore, the paperdiscusses only issues in biomicromanipulation and more specifically, the manipulation ofsingle adherent cells. Adherent cells grow at the bottom of a cultivation dish and form acell population, while suspended cells, such as blood cells and egg cells, grow loosely inthe medium, as depicted in Fig. 1.
Adherent cells are much smaller in size (10 - 20 micrometres in diametre) than eggcells, which are the most typically microinjected suspended cells. As the size of the cellsin cell cultures is nearly 10 times smaller than that of the egg cells, microinjection ofadherent cells requires micromanipulators of higher accuracy, both in terms of thepositioning accuracy as well as the preciseness of the penetration. Since adherent cellsgrow at the bottom of the petri dish, the cells are not penetrated from the side, but morefrom the top. Thus, the microcapillary must go through the membrane, but it must nottouch the bottom of the cultivation dish, which could break the capillary. Furthermore,

the penetration movement of the capillary should be such that the injection-causedopening in the membrane is as small as possible and the injection volume should besufficiently small not to harm the cell. Since the cells are small and they tend to grow inpopulation close to one another, they are difficult to detect. This imposes highrequirements upon the vision and other measurement system as well. To summarise, thedevelopment of a microinjection system for the automatic intracellular injection of singleadherent cells is a very challenging task. However, a system that would automaticallydetect, manipulate and analyse a single living cell in a cell culture would provideenormous advantages over the manual systems.
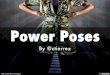
Manipulation of micro-objects is challenging due to high demands set on themicromanipulator but also due to uncertainties in manipulation caused by the scalingeffect1. Biomicromanipulation is even more challenging because of the uncertainty causedby biology. Since each cell type has its own specific properties, slightly different detectionand cultivation but also manipulation parameters are needed for each cell type.Moreover, the state of the cell population varies over the time, and cell batches and evencells are individuals which also increases the uncertainty of successful cultivation,detection and manipulation of cells. Fig. 2 illustrates differences in two adherent cellcultures: a retinal pigment ephithelial (RPE) and a neuronal SH-SY5Y cell culture.
The most typical manipulation operations performed in an adherent cell cultureinclude intracellular microinjection, cell isolation and microdissection, andelectrophysiological measurements of the cell membrane activities. This paperconcentrates on the issues related to the intracellular microinjection and more specifically,to a capillary pressure microinjection method. Thus, this paper discusses the challengesrelated to the automatic capillary pressure microinjection of single adherent cells.
Fig. 1. Microinjection into (a) adherent cells and (b) suspended cells. Since suspended cells grow loosely in the medium, they have to be held by another capillary in order to
be injected.
1. Relationships between physical quantities change in the micro world. For exampleelectrostatic forces and van der Waals forces are more dominant than gravity.

The rest of the paper is organised as follows. Section 2 gives a brief overview of theapplication areas of biomicromanipulation. Section 3 describes first concisely the basiccomponents of a capillary pressure microinjection system and concentrates then onchallenges in the automation of the method. Section 4 presents two micromanipulatorstructures developed at the Tampere University of Technology and steps taken towardsa fully automatic capillary pressure microinjection system. The paper is concluded inSection 5
2 Applications of Biomicromanipulation
The most important application area of micromanipulation has been the manipulation ofliving cells. Particularly, intracellular injections and bioelectrical recordings have beenextensively used in basic biological research, drug development, in-vitro fertilisation,transgenics and other biomedical areas. Another important application area ofmicromanipulation is microassembly but since it is out of scope of this workshop, thispaper will only discuss the aforementioned applications of cell micromanipulation.
2.1 Intracellular Injections
This section gives a brief overview of intracellular injection in such applications as drugdevelopment, toxicology, basic biology, in-vitro fertilisation and transgenics.
2.1.1 Drug Development and Toxicology
Laboratory animals and cell lines of cancer origin are presently routinely used in drugdevelopment to study the effects of new drug compounds. Their use, however, introducestechnical, ethical and economical drawbacks. Firstly, since different species are not alike,laboratory animals may not necessarily provide precise information about the effects of
Fig. 2. (a) Retinal pigment ephithelial and (b) neuronal cell culture.
(b)(a)

drug compounds on humans. Moreover, human cell lines are typically homogeneouscultures of cancer origin which do not mimic the function of normal tissues and organs.Secondly, the use of laboratory animals in the drug development and toxicological testsposes ethical problems, and the European Union intends to forbid their use for instancein the cosmetic industry as soon as alternative methods become available. Thirdly, usinglaboratory animals is strictly regulated and expensive and therefore, companies would beready to use alternative, technologically feasible but cost effective methods if they wereavailable. The aforementioned reasons support the development of new cell culturescomprised of various types of cells. Heterogeneous cell cultures consisting of both healthyephithelial cells and fibroblasts1 would mimic the function of a tissue better than cells thatare of cancer origin. In addition to heterogeneous cell cultures, it is beneficial to haveprimary cell2 cultures, which represent adequately the cell types from which they arederived. However, for example neuronal cells in primary culture have a limited capabilityto divide.
When there is a need for either more detailed information concerning the behaviourof an individual cell in a culture, the interactions between different cell types, or culturescontaining only a very small number of cells, techniques that facilitate the detection,manipulation and analysis of a single cell should be available. One step towardsautomatic manipulation of single cells is the development of the micromanipulationsystems to be described in Section 4.
2.1.2 Basic Biological Research
The microinjection of single adherent cells will be become even more important in thefuture, after gene and stem cell technologies have been developed further. As is well-known, the human genome has been successfully sequenced. The next step is todetermine the functions of the genes. In the future, the human genes will be available ina form that facilitates their injection into the cells. Then, microinjection techniques couldbe used for inserting genes and small inhibitory RNAs3 into cells and for screening genefunctions.
2.1.3 In-vitro Fertilization and Transgenics
Typical applications of suspended cell injections include in-vitro fertilisation andtransgenics. In in-vitro fertilisation, a spermatozoan is inserted into an oocyte (an eggcell), while in transgenics a foreign gene (a transgene) is transferred into a chromosomeof a fertilised egg cell.
Intra-cytoplasmic sperm injection (ICSI) means the fertilisation of an egg cell in vitro.Egg cells are relatively large in size (about 100 – 150 micrometres), thus lowering therequired accuracy of the micromanipulator. However, because intracellular injectionsinto egg cells are still made manually in most cases, injection of spermatozoa into anoocyte requires skilled, experienced operators to achieve high survival and fertilisationrates. However, the precise and consistent repetition of the process has been very difficultto achieve. Survival and fertilisation rates could be raised through the use of automaticmicroinjection systems that would provide injections of consistent precision.
Transgenic animals are produced by injecting new DNA into a fertilised egg cell before itstarts dividing. The new DNA becomes incorporated into a chromosome within the
1. A fibroblast is a cell found in connective tissues.2. Primary cells are taken directly from organisms and are not sub cultured.3. A small inhibitory RNA (siRNA) is used for the inactivation of a gene.

nucleus, thus being present in every cell of the resulting animal. Numerous transgenicapplications have been developed, including the production of animals that yield aspecific protein in their milk. Transgenic cows, goats and pigs have been developed toproduce human pharmaceuticals.
2.2 Electrophysiological Recording
Electrophysiological techniques are used for recording bioelectrical signals in cells. Bothextracellular and intracellular techniques have been developed for this purpose. In patch-clamp techniques, one low-resistance electrode is used. The electrode is placed onto themembrane of the cell, not inside the cell, in such a way that a giga-ohm resistance sealforms between the electrode and the membrane. In patch-clamp techniques, either thevoltage or current is clamped and respectively, either the current or voltage is measured.Patch-clamp methods allow the recording of the activities of a single membrane channeland they impose high requirements upon the micromanipulator. In addition to the highposition accuracy required to place the electrode on the membrane, the micromanipulatorshould lack all drifting. The electrode is not permitted to drift during the recordingprocess in order to avoid breaking the giga-ohm seal, which is likely to result in the failureof the measurement. Future visions of electrophysiological recordings include themicroinjection of a compound, or several different compounds, into a cell, andsimultaneous measurement of the electrophysiological effects on the injected cell and itsneighbours. This is presented in a conceptual illustration in Fig. 3. Simultaneousmeasurement and injection requires the parallel use of several micromanipulators andcan only be performed if the micromanipulators are diminutive.
3 Automation of Capillary Pressure Microinjection
Microinjection is a technique for the delivery of small volumes of compounds intosuspended or adherent cells and it has become a prominent experimental approach inbiological research. A large variety of molecules like dyes, proteins or nucleic acids can beinjected into cells and their activity can be studied [5].Various microinjection methodsexist. The most important are capillary pressure microinjection, laser beam injection,electroporation, iontophoresis and various endocytosis methods.
Fig. 3. Illustration of integrated intracellular microinjection and bioelectrical recording.

Capillary pressure microinjection is a mechanical method, where a thin microcapillaryis penetrated through a cell membrane and then liquid is delivered from the capillary tothe cell upon a pressure pulse. The components of a capillary pressure microinjection(CPM) system include a micromanipulator for precise positioning of the microcapillaryand for the penetration of the cell membrane, a microinjector and a microcapillary for aprecise delivery of a compound into the cell, a vision system for visualisation and anenvironment control system to maintain cell cultivation conditions, such as temperature,pH, O2 and humidity.
A modification of capillary pressure microinjection is Simple Lipid AssistedMicroinjection (SLAM), in which a lipid fusion builds up between the microcapillary tipand the membrane [6]. The method is more gentle than pressure microinjection but alsoslower and still in the development phase.
Capillary pressure microinjection provides the greatest potential for an exact controlof the volume injected and importantly, also large molecules can be injected into the cells.Furthermore, the same end-effector - a microcapillary - can be used in other operations,such as cell isolation and electrophysiological measurements. Over the last years, thedevelopment of CPM technology has enabled steps towards automation and researchgroups are developing automatic microinjectors [7], [8], [9], [10]. Commercial devicessuch as those provided by Eppendorf, Narishige and Cellbiology Trading are alsoavailable. However, even though some systems are already partly automated, a hugeamount of manual work is still required by the operator. Due to the involvement of theoperator, the number of cells that can be injected in a certain time is limited. This can be aproblem if a large number of cells has to be injected for a biochemical assay or whenmicroinjection is used to produce stable transfected cell lines [11]. Thirdly, the reliability,repeatability and accuracy of the method should still be improved: the capillary getsclogged, the exact volume of the injection is not known, etc.
By increasing the level of instrumentation and automation, (i) the speed of the methodcan be increased such that its usage will be feasible even in high throughput applications,(ii) the involvement of the scientist can be reduced such that he/she can concentrate onthe analysis of the results and gets them much faster, and (iii) the reliability and accuracyof the system can be increased such that more reliable results will be obtained.
This section will describes challenges that are related to the automation of thecapillary pressure microinjection method. The micromanipulator positions themicrocapillary next to a cell in a three dimensional space and generates a movement suchthat the capillary can penetrate the cell membrane without causing a cell death. Since thepositioning task does not depend on the operation (microinjection, cell isolation, patchclamp measurement), issues related to automatic positioning are discussed separately inSection 3.1. Section 3.2 covers the challenges related to the injection itself: penetrationmovement, delivery of the substance and “fault diagnosis” of the microcapillary.Automation of issues of the vision system, environment control system and handling ofmicrocapillary before and after injections are described in Section 3.3.
3.1 Positioning of End-effector
The micromanipulator should perform the given task with a certain accuracy andrepeatability in a certain time and without damaging its environment. In the automaticmanipulation of single adherent cells, the micromanipulator must be able to position theend-effector with an accuracy that facilitates the manipulation of a single cell having a

diameter between 10 and 20 micrometres. Depending on the application, accuracies fromone micrometre to a few micrometres are needed. Magnifications of the opticalmicroscope used in microinjections are such that the maximum displacement should bein the range of several hundreds micrometres to a few millimetres along each axis. Inorder to make automation feasible, the micromanipulator should achieve speeds of a fewmillimetres per second. Forces needed are minute and the micromanipulator shouldbasically be able to carry the end-effector without an effect on the motion controlperformance.
The aforementioned performance requirements must be tackled in two differentpoints of view: hardware and software. In the selection of the actuators and sensors of themanipulator, and in designing its mechanical structure, the performance requirementsmust be taken into account. In addition to the hardware design, the motion controlsoftware and algorithms must be designed in such a way that they ensure the desiredperformance and possibly compensate for the shortcomings of the actuators. Motioncontrol issues of micromanipulators will be discussed as follows. Section 3.1.1 gives anoverview of motion control. Section 3.1.2 discusses joint space control schemes, Section3.1.3 control of piezoelectric actuators, Section 3.1.4 presents task space control schemesand Section 3.1.5 bilateral control strategies. Section 3.1.6 provides a short summary ofmotion control of micromanipulators.
3.1.1 General Issues in Motion Control of Micromanipulators
The role of the motion control system is to drive the actuators of the manipulator in sucha way that the position and contact forces of the end-effector satisfy both transient andsteady-state requirements given by the operator. The tasks can be classified into freemotion tasks where no interaction between the manipulator and the environment occurs,or the interaction is negligible, and interaction tasks where the interaction between themanipulator and the end-effector must be taken into account. In biologicalmicromanipulation, interactive forces are minute and therefore, they are not usuallytaken into account. However, the measurement and control of the force applied in thepenetration of a cell membrane can raise the success rates in intracellular injectionsindicating an increasing importance of interaction control in cell manipulation [10].Discussion on challenges of interaction control in micromanipulation is, however, limitedto bilateral control strategies covered in Section 3.1.5.
3.1.2 Joint Space Control
The problem in motion control is to move the end-effector of the manipulator in free spacealong a desired trajectory. The trajectory is typically given in task space, whereas thecontrol actions are performed in joint space. Therefore, the coordinates of the referencetrajectory must be transformed into the joint variables. The controller can operate eitheron the task space coordinates or on the joint variables. If the controller operates with thejoint variables, the control is called joint space control. In the joint space control methods,the task space coordinates are first transformed into the joint variables using afeedforward compensator. The feedforward compensator is typically an inverse positionkinematic model, but in parallel micromanipulators it can also be an inverse velocitykinematic model, as in [15], for example. The inverse position and velocity kinematicsolutions are generally straightforward for a parallel manipulator and more complicatedfor a serial manipulator.
Decentralised position feedback control in joint space, or independent joint control,contains the inverse kinematic model, and n independent position feedback controllers,

one for each active joint (either prismatic or revolute). More complicated decentralisedcontrol schemes include also velocity, acceleration and torque estimation. The jointpositions are measured and the errors in the joint positions are eliminated using SISO(Single Input, Single Output) controllers. Many of today’s robot systems, which useelectric motors, rely on PD controllers. Since piezoelectric actuators are commonly usedin micromanipulators their control is discussed separately in the following subsection.
Dynamics. In control schemes which are based on independent joint controllers, thedynamic interactions are either considered as disturbances, or they are compensated forin a feedforward path. The use of centralised multivariable control laws includingmanipulator dynamics has been proposed for applications where a high speed is neededbut they are not very commonly applied to the control of micromanipulators.
Calibration. The control schemes that operate in joint space typically provide a highrepeatability, but they suffer from a limited accuracy induced by modelling errors.Fabrication and assembly tolerances, mechanical and thermal deformations, unknowndynamics and external disturbances reduce the accuracy. Errors in the kinematic model(due to assembly and fabrication tolerances and tool exchange, for example) can becompensated for using calibration. Calibration of micromanipulators has been discussedin [12], [13], [14], for example.
3.1.3 Position Feedback Control of Piezoelectric Actuators
In many industrial manipulators, in both serial and parallel, the actuator that provideseither the linear or angular displacement is an electric motor and it is controlled using aPD controller. However, in micromanipulator designs piezoelectric ceramics have widelybeen used, since they have many beneficial properties for micromanipulation. Parallelpiezoelectric micromanipulators have been proposed for example by Arai et. al [15],Breguet et. al [16], Gao et. al [17], Guo et. al [18], Kallio et. al [19], Lee et. al [20], Ohya et.al [21] and Tanikawa et. al [22], while serial piezoelectric micromanipulators have beenproposed by Codourey et. al [23], Fukuda et. al [24], Goldfarb et. al [25] and Morishita et.al [26], for example. Despite their wide use, piezoelectric actuators suffer also from suchdrawbacks as large hysteresis, drift and self-heating which decrease the open-looppositioning accuracy. Therefore, feedback control is essential, if a piezoelectricmicromanipulator is used in an automatic mode. Especially hysteresis is a problem, sinceit can cause not only positioning error but also instability. Many methods have beenproposed for improving the displacement behaviour of piezoelectric actuators.
The compensation of the non-linearities is usually accomplished by means of feedbackvoltage control, where the displacement of the piezoelectric actuator is measured and theerror is eliminated using feedback control. Other control principles include feedforwardvoltage control, where non-linear hysteresis models are typically used [27], [28], [29];feedforward charge control, where the operating current is controlled [30], [31], [32] andfeedback charge control, where the charge is measured and controlled [33], [34], [35].
3.1.4 Task Space Control
In the joint space control schemes, the input signal of the controller is expressed in termsof the joint variables. As was discussed, they typically provide a high repeatability, butthey suffer from a limited accuracy. Errors induced by assembly and fabricationtolerances and tool exchange, for example, can be compensated for using calibration, butsuch error sources as thermal deformation and vibrations, cannot be eliminated. The useof the end-effector pose measurement in the control system facilitates an efficientcompensation of external disturbances and inaccuracies in the manipulator model. In

micromanipulators, an optical microscope equipped with a CCD camera is the mostfrequently used method to detect the position of the end-effector. Visual servoingstrategies for micromanipulators has been discussed for example in [10], [36], [37], [38],[39], [40], [41], [42] and [43]. The use of the optical microscope introduces such challengesas a limited depth of field which must be taken into account when visual servoingalgorithms are developed for biomicromanipulation systems.
3.1.5 Bilateral Control
In teleoperation, the operator commands the motion of the manipulator using a joystick.When forces of the operation environment are reflected back to the operator, the systemis called bilateral, as information flows in two directions. Several experimental studies onconventional teleoperation have shown that with the aid of this force-reflection, theperformance of the operation is improved or the operator can even perform tasks thatotherwise are beyond his capabilities. Same can be expected when micro parts arehandled by teleoperation. The specific feature of micromanipulation is that informationflows must be scaled: the master position must be scaled down and the contact forces ofthe micro environment must be magnified. Bilateral control of micromanipulators and thescaling effect has been discussed for example in [7], [44], [45], [46], [47], [48], [49].
3.1.6 Summary
The free motion control strategies developed for large-size manipulators are relativelywell adaptable to micromanipulators and motion control of micromanipulators can beconsidered as a relatively well studied topic. The specific issues relate to the control ofactuators, typically piezoelectric actuators, and to the use of an optical microscope as amotion sensing device and its consequences to the visual servoing strategies. Thepositioning challenges in automatic micromanipulation are closely related to theavailability of components (sensors and actuators) which possess sufficient resolution,stroke, speed, and small size for automatic micromanipulation purposes.
3.2 Microinjection
In issues related to the automatic manipulation of biological cells, motion control of themicromanipulator is probably the most studied but not the only topic. In capillarymicroinjection, the precise penetration of the cell membrane and the exact delivery of acompound into a cell are crucial but still not satisfactorily automated functions. Section3.2.1 discusses the challenges in the penetration of the cell membrane and Section 3.2.2microinjection challenges. Section 3.2.3 describes the challenges that are related to thefault diagnosis of the microcapillary during the injection.
3.2.1 Penetration Challenges
This section discusses positioning challenges that are specific to microinjection. Inaddition to the three dimensional positioning, the micromanipulator related challengesinclude the detection of the capillary-cell contact and the penetration of the cellmembrane. While the free motion control schemes are relatively well studied, thedetection of the capillary-cell contact and the generation of the penetration movementhave not been studied as extensively. In the current systems, the user typically controlsthe movements of the micromanipulator using a joystick and uses visual or a prioriinformation to conclude when the tip touches the cell membrane. In automatic systems,the detection of the contact must be performed automatically. It can be made either using

a machine vision system or electrically. An electrical method being developed at TampereUniversity of Technology will be presented in Section 4.
Some studies of the optimum cell membrane penetration have been performed [50].The critical issues in the membrane penetration include the resolution, straight-lineaccuracy, positioning accuracy and speed of the movement. The straight-line accuracydescribes the deviation of the movement from an ideal straight-line. The deviation canoccur either in the horizontal or vertical plane and it should be as small as possible tominimise the cell damage. Furthermore, it is preferable to penetrate the membrane by asingle high speed advancing step which must be short enough not to damage the cell. Ashort but high-speed step means rapid acceleration and deceleration which tend to set uptip vibrations. These after-vibrations must be eliminated, since they can damage the cellmembrane if they continue inside the cell. Even though the demands on high accelerationand deceleration and eliminated after-vibrations conflict with each other, both of themmust be met to penetrate the cell membrane successfully. On the other hand, controlledhigh-frequency small amplitude vibration of the capillary has been shown to improve thepenetration success.
Force measurement and force control during the penetration of the cell membrane is apotential method to increase the success rate of the penetration. Papers discussing forcemeasurement in the manipulation of biological cells include [7], [10], [51].
3.2.2 Injection Challenges
The capillary pressure microinjection technique uses a microcapillary with a sharp tip topenetrate the cell membrane mechanically and a controlled pressure pulse for precisevolume transfer. The volume injected can be influenced with such injection parameters as:
• the amplitude of the pressure pulse (the applied injection pressure),
• the length of the pressure pulse (the application time of the injection pressure),
• the offset of the pressure pulse (the level of the balance pressure).
In an ideal case, if the pressure and time adjustments would stay the same, all cellswould receive the same amount of sample. However in reality, the volume changesconsiderably, see [52] and [53] for example. Another critical problem tightly connectedwith the repeatability of the injected volume is an undesired efflux from or influx into themicrocapillary. In influx, the cell medium flows into the capillary and resulting in lesssample delivered than expected after calibration. In efflux, the filling solution leaks outfrom the capillary resulting in more sample delivered than expected after calibration.Furthermore, in efflux the cells can uptake the leaking filling solution and hence, changethe results of the experiment. On the other hand, influx can also cause the clogging of thecapillary by aggregates in the medium and thus, change the size of the capillary openingor even entirely prevent the injection. To avoid capillary clogging, most scientists preferthe efflux of the solution over the influx of the medium.
The relationship between the injection parameters and the injected volume isdetermined using a calibration procedure, as depicted in Fig. 4. The model describing therelationship cannot ever be determined exactly but equipment and biology relateddisturbance parameters affect the calibration accuracy.

The equipment related disturbance parameters include:• the microcapillary tip (surface treatment, tip length, size of the tip opening,
possible tip breakage),
• the microinjector (stability of the pressure source, accuracy of the pressureregulator and the speed of the check valve) and
• the positioning and penetrating device (positioning accuracy and preciseness ofthe axial movement).
The biological disturbance parameters are much more difficult to compensate for andinclude:
• cell (internal pressure, elasticity of the membrane, size),
• medium (viscosity, homogeneity, aggregates) and
• filling solution (viscosity, air bubbles).
The relationship between the injection parameters and the disturbance parameters hasbeen analysed in [54] and is illustrated in Fig. 5.
3.2.3 Microcapillary Related Challenges
As was discussed in the previous section, one of the important factors limiting the successof capillary pressure microinjection is the clogging of the capillary. Typically a fewinjections can successfully be performed before the capillary gets clogged. In today’ssystems, the user must clean the capillary after each injection using an extensive pressurepulse and try to manually detect if a liquid jet comes out from the capillary or change thecapillary frequently. In an automatic system, a method for detecting the capillary cloggingis needed. Furthermore, the other frequent problem is the breakage of the capillary tip.This is prevented in current systems by limiting the movement of the capillary not gettingtoo close to the bottom of the cultivation well. If the tip gets broken it should be changed.Possible techniques to detect the breakage include a machine vision based and anelectrical method. Current commercial systems do not consist of either clogging orbreakage detection and no academic solutions are available according to the authors’
Fig. 4. Calibration of a capillary pressure microinjector.
Desired volume
MODEL
Calibration
INJECTION
Injection parameters
Injection parameters
Volume out
Disturbance variables
Disturbance variables

knowledge. Section 4 will present an electrical method which facilitates the detection ofboth capillary clogging and capillary breakage.
3.3 Other Components
In a fully automatic system, other functions in addition to micromanipulation andmicroinjection should be automated, too. They include the handling of the end-effector -such as filling and changing the microcapillary, visualisation of the cells and themicrocapillary, and cell cultivation.
If the microcapillary gets broken or permanently clogged it must be changed. This iscurrently made manually which, together with manual filling of the capillary, remarkablyreduce the efficiency of the method. Therefore, in addition to the capillary breakage andclogging detection, an automatic CPM system should be able to change and fill themicrocapillary automatically.
In automatic micromanipulation, the automation of the optical microscope plays animportant role. Current commercial microscopes already provide such motorisedfeatures as zoom, change of magnification, xy positioning and illumination, all of whichsupport the automatic cell manipulation. More advanced features, which are still to bedeveloped to the level needed in commercial products, include recognition of cells andtheir states. Examples of the research concerning cell detection algorithms include [55],[56], [57], [58], [59].
When developing fully automatic micromanipulation systems for living cells, issuesrelated to cell cultivation are of primary importance: in order to perform any experimentthe cell culture must be vital. The cell cultivation system should guarantee correcttemperature, pH and O2 concentration, provide nutrition for the cells and preventcontamination. Moreover, cells should be exposed to an excitation light as little aspossible in order to prevent for instance photo bleaching of fluorophores, which wouldresult in the formation of cytotoxic radicals [11].
Fig. 5. Relationship between the injection parameters and disturbance variables [54].
Pulse area
Time
Injection pressure
Type
INJE
CT
ION
P
AR
AM
ET
ER
S
Balance pressure
Medium viscosity
Positioning, penetration
Filling solution viscosity
Capillary tip
Micro-injector
Size
Viscosity, homogeneity, internal pressure
CELL
Type of sample
Type of medium

4 Research at Tampere University of Technology
This section presents the research carried out on the automatic manipulation of singleadherent cells in the Institute of Automation and Control (ACI) at the Tampere Universityof Technology (TUT). Section 4.1 presents two micromanipulator structures (one paralleland one serial) developed at TUT. Both micromanipulators have three degrees-of-freedom and they are composed of piezoelectric actuators. Section 4.2 discusses the stepstaken towards automatic microinjection. It first presents two motion control schemes (onein task space and one in joint space) and discusses the performance achieved with theschemes. Then the results of a method which facilitates automatic detection of contactbetween the cell membrane and the microcapillary, capillary breakage and capillaryclogging are presented. Finally, the evaluation of the success rate in the microinjection ofsingle adherent cells using the developed system is discussed. The present study includesthe evaluation of penetration, injection and cell survival success.
4.1 Micromanipulator Structures
4.1.1 Piezohydraulic Micromanipulator
The first micromanipulator developed in the ACI at TUT was a parallel composite-jointpiezohydraulic micromanipulator [19]. It is composed of three piezohydraulic actuatorsconnected in parallel. In the piezohydraulic actuator, the deformation of a piezoelectricdisk is transformed into a linear displacement using hydraulic oil and a bellows. Threebellows, which are able to elongate along their longitudinal axis and bend about the othertwo axes, form the kinematic chains of the micromanipulator. Since the bellows is amonolithic element and possesses both translational and rotational degrees of freedom,that micromanipulator is composed of composite joints.
As a bellows deforms axially and bends in two degrees of freedom, no additionalprismatic, revolute, universal or spherical joints are needed. Thus, the constructedpiezohydraulic micromanipulator is the first parallel structure which does not useseparate joints but is composed of three composite joints. This simplifies the structure andis a beneficial feature in the fabrication and assembly of miniaturised micromanipulators.
The micromanipulator consists of three piezohydraulic actuators, a mobile platform,an end-effector and a pose measurement system. The components of the manipulator areillustrated in Fig. 6 a). By changing the lengths of the actuators, the orientation of themobile platform, and thus the position of the end-effector, can be controlled. Themicromanipulator consists of an internal pose measurement system which detects themotion of the mobile platform by means of Hall sensors. In addition to the Hall sensormeasurement, the micromanipulation system possesses an external vision-basedmeasurement system to measure the position of the tip of the end-effector.
The piezohydraulic actuator consists of a piezoelectric RAINBOW® actuator, aminiaturised hydraulic chamber, hydraulic oil and a bellows, as illustrated in Fig. 6 b).The piezoelectric actuator is the active element and is placed in the chamber. When avoltage is applied to the piezoelectric element, it deforms. By buckling the actuator, theoil is moved from the fluid chamber to the bellows, which as a consequence elongates.

Since the effective area of the bellows is smaller than that of the RAINBOW® element, thedisplacement is amplified.
4.1.2 MANiPEN
The second structure developed in TUT / ACI is a serial micromanipulator which iscomposed of two piezoelectric benders and a linear motor. The micromanipulator havingthree translation degrees-of-freedom is depicted in Fig. 7.
Fig. 6. (a) Structure of the piezohydraulic micromanipulator: 1) microcapillary, 2) mobile platform, 3) bellows, 4) permanent magnet of the pose measurement system, 5) place for the piezoelectric actuator (fluid chamber), and 6) triangular connection piece.
(b) Schematic of the piezohydraulic actuator.
Fig. 7. MANiPEN micromanipulator.
1
2
4 3
5
z
yx
6
Fluid chamber
Piezoelectric actuator
Fluid
Bellows
(b)(a)

The micromanipulator, MANiPEN, has been designed in a shape of pen such thatseveral micromanipulators can be used simultaneously under an optical microscope. Thisfacilitates simultaneous injection and electrophysiological recording (as was shown inFig. 3) or high throughout injection of several substances into cells without changing themicrocapillary between the injections. The use of several MANiPEN micromanipulatorssimultaneously is depicted in Fig. 8.
4.2 Automatic Microinjection
4.2.1 Motion Control
Both task space and joint space motion control schemes have been implemented in thedeveloped micromanipulator systems. The piezohydraulic micromanipulator has beencontrolled with a decentralised position feedback control scheme in task space, where theposition of the capillary is measured using a vision system. The used visual servoingscheme belongs to the position-based strategies. The structure of the controller is depictedin Fig. 9 and an example of the control result in Fig. 10.
The controller essentially consists of three independent single-input / single-output(SISO) joint controllers and a static nonlinear decoupling block (an inverse Jacobianmatrix). In addition, it includes a coordinate transform element which transforms the taskspace variables (the position of the end-effector: x, y, z) to the control variables of the
Fig. 8. Illustration of the simultaneous use of several MANiPEN micromanipulators.

micromanipulator (the pose of the mobile platform: α, β, ), and a machine visionsystem which measures the position of the microcapillary.
The MANiPEN micromanipulator is controlled using a decentralised positionfeedback control scheme in joint space. The control scheme is composed of a complicated
Fig. 9. Structure of the decentralised task space position feedback controller.
Fig. 10. Response of the piezohydraulic micromanipulator to ramp inputs along the (a) x axis, (b) y axis and (c) z axis. The solid line represents the measurement signal and the
dashed line the reference signal.
∆zm
JoystickKeyboardData file
InverseKinematics
InverseJacobianmatrix
PID
PID
P
αr
βr
∆zr
[αβ∆z]
l
f1
f2
f3
Actuatorbalancing
Static nonlinear decoupling block
Piezo 1
Piezo 2
Piezo 3
End
-eff
ecto
r
Filter
Co-ordinate
Transform
xr
yr
zr
Gz
Gy
Gx
∆zm
βm
αm
zm
ym
xm
Coordinates fromvision system
-
+
+
+-
-
Co-ordinate
Transform
Micromanipulator
1l&
2l&
3l&
0 5 10 15 20 25 30 35
0
50
100
150
Time [s]
x di
spla
cem
ent [
µm]
0 5 10 15 20 25 30 35
0
50
100
150
Time [s]
y di
spla
cem
ent [
µm]
0 1 2 3 4 5 6 7 8 9 10
0
50
100
Time [s]
z di
spla
cem
ent [
µm]
(a)
(b)
(c)

inverse kinematics block and three independent SISO controllers as depicted in Fig. 11.The parameters of the inverse kinematics model are derived by calibration for eachmicromanipulator.
The repeatability performance of MANiPEN controlled using the proposed joint spacecontrol scheme is shown in Fig. 12 and the overall performance of the device issummarised in Table 1.
Fig. 11. Decentralised position feedback control in joint space for the MANiPEN micromanipulator.
Fig. 12. Repeatability of MANiPEN when a 350 µm square is driven 10 times.
Table 1: Performance of MANiPEN.
Quantity Value
Accuracy 3 µm with calibration
Repeatability 3 µm
Resolution 200 nm
Workspace 5x3x11 mm3
Speed 5 mm/s
InverseKinematics
xr qrJoints
u Capillary
q x
Manipulator
qm
−Sensor
ControllerInverse
Kinematics
xr qrJoints
u Capillary
q x
Manipulator
qm
−Sensor
ControllerInverse
KinematicsInverse
Kinematics
xrxr qrJointsJoints
u Capillary
q xx
Manipulator
qm
−SensorSensor
ControllerController

4.2.2 Microinjection
In addition to the free motion control, the research group has studied the automation ofthe capillary pressure microinjection method. Currently the operator controls themicromanipulator using a joystick. Vision system provides visual information about themicrocapillary and cells. When the operator detects a contact between the tip of thecapillary and the cell membrane, he/she stops the micromanipulator and pushes a buttonto automatically perform intracellular injection. The micromanipulator first advances themicrocapillary through the cell membrane. A precise, fast and straight penetrationmovement is crucial for successful microinjection. Then, the microinjector generates apressure pulse to eject a desired amount of substance into the cell and finally, themicromanipulator removes the capillary from the cell.
In the next phase of the research, the control system will detect the contact betweenthe capillary and the cell and stop the micromanipulator automatically. An electricdetection method which is based on the use of a patch-clamp amplifier has initially beentested and the results are promising. Fig. 13 presents the change in the measurementsignal (corresponds to a change in impedance) when the microcapillary touches the cellmembrane (Fig. 13b) and when the capillary tip gets broken (Fig. 13c). As can be seen, thesignal reduces (impedance increases) in contact and increases (impedance reduces) witha broken tip. Correspondingly, impedance increases when the capillary gets clogged. Theinitial results indicate detectable changes and the current work concentrates on thequantification of the changes.
Fig. 13. Change in the measurement signal when the microcapillary touches the cell membrane and when the tip gets broken. (a) Measurement signal before the contact
with an undamaged capillary, (b) measurement signal during the contact with an undamaged capillary and (c) measurement signal with a broken capillary.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0
0.05
0.1
Time [s]
Me
asur
eme
nt s
igna
l [V
]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0
0.05
0.1
Time [s]
Mea
sure
men
t sig
nal [
V]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0
0.05
0.1
0.15
Time [s]
Mea
sure
men
t sig
nal [
V]
(a)
(b)
(c)

4.3 Evaluation of Injection Success
The final goal of the research is to develop a high throughput automatic microinjectionsystem. Before the system can be used by cell biologists in such applications as toxicology,functional genomics and cancer and HIV research, the harmlessness of the injectionmethod must be proved. Furthermore, the success rate1 of the injection must be known.Thus, the goals of the current study are to (i) determine the success rate of the developedmicroinjection method and (ii) to prove that the method itself does not harm the cells.
The first step in studying the success rate is to determine the success rate of themembrane penetration. Visual validation of the membrane penetration is challenging,due to a limited resolution of an optical microscope and the high-speed penetrationmovement. Therefore, the penetration rate was determined by injecting an excessiveamount of substance into a cell with a high pressure pulse which resulted in an eruptionof the cell membrane. The eruption was visualised with a vision system. The penetrationtests were performed on two types of adherent cells: RPE (Retinal Pigment Epithelia) cellsand neuronal cells SY5Y. The success rate of the penetrations appears to be as high as 96%.
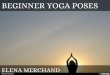
In the next phase, a small amount of fluorescence dextran was injected into cells. Theinjection results were evaluated using a fluorescence microscope. Fig. 14 a) depicts the cellculture before the microinjections and Fig. 14 b) the same culture after the injectionsvisualised with the fluorescence microscope. The results show that the fluorescencedextran was successfully delivered into 40 - 50% of the injected cells. The main reason forthe low success rate is the clogging of the microcapillary. The rate can be increased bytrying to clean the capillary after each injection using a high pressure pulse or by changingthe capillary frequently. If a toxic substance is to be injected cleaning the capillary usinga high pressure pulse is not recommended. On the other hand, a frequent change of thecapillary is very tedious and slow. In order to minimise the number of cleaning andchanging the capillary, the method to detect the capillary clogging by electric means isunder development.
The last step is to study the survival rate of the cells after microinjection. In thesurvival tests, a KCl solution was microinjected with a low pressure and microinjectedcells were observed six hours after microinjection. The microinjected neuronal cellschanged their shapes to a sphere, adhered back to the bottom of the well plate and grewsome dendrites during an six-hour experiment. This proves that the neurons havesurvived the KCl injection. More tests are to be made to obtain statistically reliablesurvival rate value for the injections.
1. The success rate describes the probability that the substance is successfully delivered into thecell.

5 Conclusions
The development of automatic manipulation techniques for single biological cells will beof increasing importance in the future. In such applications as functional genomics, in-vitro toxicology, cancer and HIV research, intra-cytoplasmic sperm injection andtransgenics advanced microrobotics systems that facilitate simultaneous operations in afast and precise manner will be needed.
Current micromanipulation systems are still too tedious for a large-scale use byscientists and industry. Therefore, performance enhancement and miniaturisation of themicromanipulators and automation of the operations are important development issues.The performance enhancement includes the raise of the speed but not at the expense ofthe accuracy. This might require the application of more advanced motion controlschemes in the micromanipulation systems. Miniaturisation is necessary to facilitate theuse of several micromanipulators simultaneously under an optical microscope.Automation brings in several challenges not only in the positioning of the end-effector butalso in microinjection, visualisation, automatic detection and cell cultivation. In capillarypressure microinjection, for example, the accuracy and repeatability of the injectedvolume must be improved. Current open loop systems are not sufficient but microsystem-based closed loop systems should be developed. Related issues include influx of themedium and cell aggregates into the microcapillary causing clogging and efflux of thefilling liquid from the capillary into the medium in between the injections.
The research work in the Institute of Automation and Control at the TampereUniversity of Technology aims at the development of a fully automatic microinjectionsystem. The system consists of two micromanipulators - a serial structure and a parallelstructure - and their control system, a microinjector, a machine vision system developedby the Technical Research Centre of Finland (VTT) and a cell cultivation system. The
Fig. 14. Evaluation of the injection success. (a) The cell culture before and (b) after the injection of a fluorescence dye (circles indicate the fluorescence dye).
(a) (b)

control system includes motion control algorithms for precise positioning of themicrocapillary and penetration of the cell membrane. The current development includesa measurement system for the detection of the contact between the cell membrane and thecapillary tip and for the detection of the capillary breakage and clogging.
Acknowledgements
The work reported in this paper has been funded by the National Technology Agency ofFinland (Tekes) and the Academy of Finland. The work has been performed in theInstitute of Automation and Control at the Tampere University of Technology by aresearch team which consists of Pasi Kallio, Johana Kuncová, Mikko Lukkari, ElinaNieminen, Marek Novotný, Tuukka Ritala, Pekka Ronkanen, Katrin Viigipuu, QuanZhou and professor Heikki Koivo. Important collaborators include professor TimoYlikomi and professor Hanna Tähti of the Cell Research Centre at the University ofTampere, professor Jouko Viitanen and Juha Korpinen of the Technical Research Centreof Finland, Dr. Tuula Jalonen of the Institute of Medical Technology at the University ofTampere, Dr. Marja-Leena Linne at the Digital Media Institute at the University ofTampere, and their research groups
References
1 Berns, M.W. “Laser Scissors and Tweezers”. Scientific American, April 1998, pp. 52 -57.
2 Arai, F., Ogawa, M., Mizuno, T., Fukuda, T., Morishima, K. and Horio, K. “Teleop-erated Laser Manipulator with Dielectrophoretic Assistance for Selective Separationof a Microbe”. IEEE/RSJ International Conference on Intelligent Robots and Systems,Kyonjyu, Korea, October 1999, pp. 1872 - 1877.
3 Pesce, M. and De Felici, M. “Purification of Mouse Primordial Germ Cells by Mini-MACS Magnetic Separation System”. Developmental Biology, Vol. 170, 1995, pp. 722 -725.
4 Kozuka, T., Tuziuti, T., Mitome, H., Fukuda, T. and Arai, F. “Two-dimensionalAcoustic Micromanipulation Using Three Ultrasonic Transducers”. InternationalSymposium on Micromechatronics and Human Science, Nagoya, Japan, Month 1998, pp.201 - 204.
5 Feramisco J., Perona R. and Lacal J. C. “Needle Microinjection: A Brief History”. InMicroinjection edited by Lacal, Perona, Feramisco. Birkhäuser Verlag, Basel, Switzer-land, 1999.
6 Laffaffian, I., and Hallett, M.B. “Lipid-Assisted Microinjection: Introducing Materialinto the Cytosol and Membranes of Small Cells", Biophysics Journal, Vol. 75, No. 5,November 1998, pp. 2558 - 2563.
7 Fukuda, T. and Arai, F. “Prototyping Design and Automation of Micro/nanoManipulation System”. IEEE International Conference on Robotics & Automation, SanFrancisco, USA, April 2000, pp. 192 - 197.
8 Tan, K.K. and Ng, S.C. “Computer-Controlled Piezo Micromanipulation System forBiomedical Applications”. Engineering Science and Education Journal, December 2001,pp. 249 - 256.
9 Tan, KK., Ng, DC. and Xie, Y. “Optimal Intra-Cytoplasmic Sperm Injection with aPiezo Micromanipulator.” 4th World Congress on Intelligent Control and Automation,Shanghai, China, June 2002, pp. 1120 - 1123.

10 Yu, S. and Nelson, B.J. “Microrobotic Cell Injection”. IEEE International Conference onRobotics and Automation, Seoul, Korea, May 2001, pp. 620 - 625.
11 Saffrich R. and Pepperkok R., “EMBO Practical Course – Microinjection and Detec-tion of Probes in Cells”, http://www.embl-heidelberg.de/~saffrich/Microinjec-tion/manual.html, 21.5.2001.
12 Arai, T., Suzuki, A., Kato, Y., Mae, Y., Inoue, K. and Tanikawa, T. “Automated Cal-ibration for Micro Hand using Visual Information”. IEEE/RSJ International Confer-ence on Intelligent Robots and Systems, Lausanne, Switzerland, September 2002, pp.293 - 298.
13 Kawaji, A. Arai, F., Fukuda, T. “Calibration for Contact Type of Micro-manipula-tion”. Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots andSystems. Kyongju, Korea, Octover 1999, pp. 715 - 720.
14 Li, G. and Xi, N. “Calibration of a Micromanipulation System”. IEEE/RSJ Interna-tional Conference on Intelligent Robots and Systems, Lausanne, Switzerland, September2002, pp. 1742 -1747.
15 Arai, T., Herve, J. and Tanikawa, T. “Development of 3 DOF Micro Finger”. Interna-tional Conference on Intelligent Robots and Systems, Osaka, Japan, November 1996, pp.981 - 987.
16 Bergander, A. Breguet, J.-M., Perez, R. and Clavel, R. “PZT Based Manipulators forCell Biology”. 2001 International Symposium on Micromechatronics and Human Science.Nagoya, Japan, September 2001, pp. 193 - 196.
17 Gao, P. and Swei, S.-M. “A Six-Degree-of-Freedom Micro-Manipulator Based onPiezoelectric Translator”, Nanotechnology, Vol. 10, 1999, pp. 447 - 452.
18 Guo, S., Zhang, H. and Hata, S. “Complex Control of a Human Scale Tele-operatingSystem for Cell Biology”. 4th World Congress on Intelligent Control and Automation.Shanghai, China, June 2002, pp. 71 - 76.
19 Kallio, P., Lind, M., Zhou, Q. and Koivo, H.N. “A 3 DOF Piezohydraulic ParallelMicromanipulator”. International Conference on Robotics and Automation, Leuven, Bel-gium, May 1998, pp. 1823 - 1828.
20 Lee, K-M. and Shah D.K., “Kinematic Analysis of a Three-degrees-of-freedom In-Parallel Actuated Manipulator”, IEEE International Conference on Robotics and Auto-mation, Raleigh, USA, March - April 1987, pp. 351 - 357.
21 Ohya, Y., Arai, T., Mae, Y., Inoue, K. and Tanikawa, T. “Development of 3-DOF Fin-ger Module for Micro Manipulation”. IEEE/RSJ International Conference on IntelligentRobots and Systems, Kyonjyu, Korea, October 1999, pp. 894 - 899.
22 Tanikawa, T. and Arai, T. “Development of a Micro-Manipulation System Having aTwo-Fingered Micro-Hand”. IEEE Transactions on Robotics and Automation, Vol. 15,No. 1, February 1999, pp. 152 - 162.
23 Codourey, A., Siegwart, R., Zesch, W. and Büchi, R. “A Robot System for AutomatedHandling in Micro-World”. Intelligent Robots and Systems, Pittsburgh, USA. August1995, pp. 185 - 190.
24 Fukuda, T., Fujiyoshi, M., Arai, F. and Matsuura, H. “Design and Dexterous Controlof Micromanipulator with 6 D.O.F.” IEEE International Conference on Robotics andAutomation, Sacramento, USA, April 1991, pp. 1628 - 633.
25 Goldfarb, M. and Speich, J.E. “Design of a Minimum Surface-Effect Three Degree-of-Freedom Micro-manipulator”. IEEE International Conference on Robotics and Auto-mation, Albuquerque, New Mexico, USA, April 1997, pp. 1466 - 1471.
26 Morishita, H. and Hatamura, Y. “Development of Ultra Micro Manipulator SystemUnder Stereo SEM Observation”. IEEE International Conference on Intelligent Robotsand Systems, Yokohama, Japan, July 1993. pp. 1717 - 1721.
27 Ge, P. and Jouaneh M. “Tracking Control of a Piezoceramic Actuator”. IEEE Trans-actions on Control Systems Technology, Vol. 4, No. 3, May 1996.

28 Croft, D., Shedd, G. and Devasia, S. 2000. “Creep, Hysteresis, and Vibration Com-pensation for Piezoactuators: Atomic Force Microscopy Application.” American Con-trol Conference, Chicago, Illinois, June 2000.
29 Choi, G. S., Kim, H.-S. and Choi, G. H. 1997. “A Study on Position Control of Piezo-electric Actuators”. IEEE International Symposium on Industrial Electronics, Guima-raes, Portugal, July 1997.
30 Newcomb, C. V. and Flinn, I. “Improving the Linearity of Piezoelectric CeramicActuators”. Electronics Letters, Vol. 18, No. 11, May 1982.
31 Ronkanen, P., Kallio, P. and Koivo, H. “Current Control of Piezoelectric Actuatorswith Power Loss Compensation”. IEEE/RSJ International Conference on IntelligentRobots and Systems. Lausanne, Switzerland, October 2002.
32 Ronkanen, P., Kallio, P. Zhou, Q. and Koivo, H. “Current Control of PiezoelectricActuators with Environmental Compensation”. Accepted in Micro.tec 2003 the 2nd
VDE World Microtechnologies Congress, Munich, Germany, October 2003.33 Comstock, R. H. 1981. “Charge Control of Piezoelectric Actuators to Reduce Hyster-
esis Effects”. U.S. Patent 4,263,527.34 Perez, R., Agnus, J., Breguet, J.-M., Chaillet, N., Bleuler, H. and Clavel, R. 2001.
“Characterisation and Control of a 1DOF Monolithic Piezoactuator (MPA)”. SPIEVolume 4568: Microrobotics and Microassembly III, Boston, USA, October 2001.
35 Furutani, K., Urushibata, M. and Mohri, N. 1998. “Improvement of Control Methodfor Piezoelectric Actuator by Combining Induced Charge Feedback with InverseTransfer Function Compensation”. IEEE International Conference on Robotics andAutomation, Leuven, Belgium, May 1998, pp. 1504 -1509.
36 Feddema, J.T. and Simon, R.W. “CAD-Driven Microassembly and Visual Servoing”.IEEE International Conference on Robotics and Automation, Leuven, Belgium, May 1998,pp. 1212 - 1219.
37 Korpinen, J., Kallio, P., and Viitanen, J. “Real Time Machine Vision System in Micro-manipulator Control”. International Conference on Machine Automation, Osaka, Japan,September 2000, pp. 657 - 662.
38 Pappas, I and Codourey, A. “3D Visual Control of Microrobots”. Workshop on MicroMechatronics and Micro Robotics, IEEE International Conference on Robotics and Automa-tion, Leuven, Belgium, May 1998.
39 Sulzmann, A. “3D Sensor based Microassembly and Quality Control Overview andExamples”. Workshop on Precision Manipulation at Micro and Nano Scales, IEEE Inter-national Conference on Robotics and Automation, Leuven, Belgium, May 1998.
40 Vikramaditya, B. & Nelson, B. “Visually Guided Microassembly Using OpticalMicroscopes and Active Vision Techniques”. IEEE International Conference on Robot-ics and Automation, Albuquerque, New Mexico, USA, April 1997, pp. 3172 - 3177.
41 Li, X., Zong, G. and Bi, S. “Development of Global Vision System for BiologicalAutomatic Micro-Manipulation System” 2001 IEEE International Conference on Robot-ics & Automation, Seoul, Korea, May 2001, pp. 127 - 132.
42 Mezouar, Y. and Allen, P.K. “Visual Servoed Micropositioning for Protein Manipu-lation Tasks.” IEEE/RSJ International Conference on Intelligent Robots and Systems,Lausanne, Switzerland, October 2002, pp. 1766 - 1771.
43 Yamamoto, H. and Sakiyama, J. “Stereoscopic Visual Servo System for Microinjec-tion.” IEEE Instrumentation and Measurement Technology Conference, Anchorage, USA,May 2002, pp- 1109 - 1112.
44 Ando, N., Korondi, P. and Hashimoto, H. “Development of Micromanipulator andHaptic Interface for Networkes Micromanipulation”. IEEE/ASME Transactions onMechatronics, Vol. 6, No. 4, December 2001, pp. 417 - 427.
45 Colgate, J.E. “Robust Impedance Shaping Telemanipulation”. IEEE Transactions onRobotics and Automation, Vol. 9, No. 4, August 1993, pp. 374 - 384.

46 Kaneko, K., Tokashiki, H., Tanie, K. ands Komoriya, K. “Impedance Shaping basedon Force Feedback Bilateral Control in Macro-Micro Teleoperation System”. IEEEInternational Conference on Robotics and Automation, Albuquerque, New Mexico, USA,April 1997, pp. 710 - 717.
47 Park, K., Chung, W.K. and Youm, Y. “Obtaining Passivity of Micro-TeleoperationHandling a Small Inertia Object”. 2002 IEEE International Conference on Robotics &Automation, Washington DC, the USA, May 2002, pp- 3266 - 3271.
48 Takeo, K. and Kosuge, K. “Implementation of the Micro-macro Teleoperation Sys-tem without Using Slave-side Force Sensors”. IEEE International Conference on Robot-ics and Automation, Albuquerque, New Mexico, USA, April 1997, pp. 1600 - 1605.
49 Yokokohji, Y., Hosotani, N. and Yoshikawa, T. “Analysis of maneverability and sta-bility of micro-teleoperation systems”. IEEE International Conference on Robotics andAutomation, San Diego, USA, May 1994, pp. 237 - 243.
50 Brown, K. T. and Flaming, D. G. “Advanced Micropipette Techniques for Cell Phys-iology”, IBRO Handbook Series: Method in the Neuroscience, Volume 9, 1995.
51 Lin, G., Palmer, R.E, Pister, K.S.J. and Roos, K.P. “Miniature Heart Cell Force Trans-ducer System Implemented in MEMS Technology.” IEEE Transactions on BiomedicalEngineering, Vol. 48, No. 9, September 2001, pp. 996 - 1006.
52 Ansorge W. “Improved System for Capillary Microinjection into Living Cells”.Experimental Cell Research, Vol. 140, 1982, pp. 31 – 37.
53 Minaschek G., Bereiter-Hahn J. and Bertholdt G. “Quantitation of the Volume of Liq-uid Injected into Cells by Means of Pressure”. Experimental Cell Research, Vol. 183,1989, pp. 434 - 442.
54 Kuncová, J. “Calibration of a Capillary Pressure Microinjection and its Implementa-tion within a Micromanipulator”. MSc Thesis, Department of Automation, TampereUniversity of Technology, 2002.
55 Arámbula Cosío, F.A., Vega, L., Herrera Becerra, A., Prieto Meléndez, R. andCorkidi G. “A Neural Network Based Workstation for Automated Cell ProliferationAnalysis”. 23rd Annual EMBS International Conference, Istanbul, Turkey, October2001, pp. 2567 - 2570.
56 Jiang, T. and Yang, F. “An Evolutionary Tabu Search for Cell Image Segmentation.”IEEE Transactions on Systems, Man and Cybernetics - Part B: Cybernetics. Vol. 32, No. 5,October 2002, pp. 675 - 678.
57 Sanchez-Marin, F.J. “Computerized Recognition of Biological Objects Using theHotelling Transform.” 22nd Annual EMBS Internation Conference, Chicago, USA, July2000, pp. 3067 - 3070.
58 Schüpp, S., Elmoataz, A., Fadili, J., Herlin, P. and Bloyet, D. “Image Segmentationvia Multiple Active Contour Models and Fuzzy Clustering with Biomedical Appli-cations.” 15th International Conference on Pattern Recognition, September 2000, pp. 622-625.
59 Zimmer, C., Labruyére, E., Meas-Yedid, V., Guillén N. and Olivo-Marin J.C.“Improving Active Contours for Segmentation and Tracking of Motile Cells in Vid-eomicroscopy”. 16th International Conference on Pattern Recognition, August 2002 , pp.286 -289.