Embed Size (px)
Citation preview
Machinen Vision and Dig. Image Analysis
1 Prof. Heikki Kälviäinen CT50A6100
Lectures 8&9: Image Segmentation
Professor Heikki Kälviäinen
Machine Vision and Pattern Recognition LaboratoryDepartment of Information Technology
Faculty of Technology ManagementLappeenranta University of Technology (LUT)
[email protected]://www.lut.fi/~kalviai
http://www.it.lut.fi/ip/research/mvpr/

Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
2
Content
• Motivation.• Detection of discontinuities.• Edge linking and boundary detection.
– Local processing.– Global processing: Hough Transform.
• Thresholding.• Region-oriented segmentation.
– Region growing. – Region splitting and merging.
• Motion-based segmentation.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
3
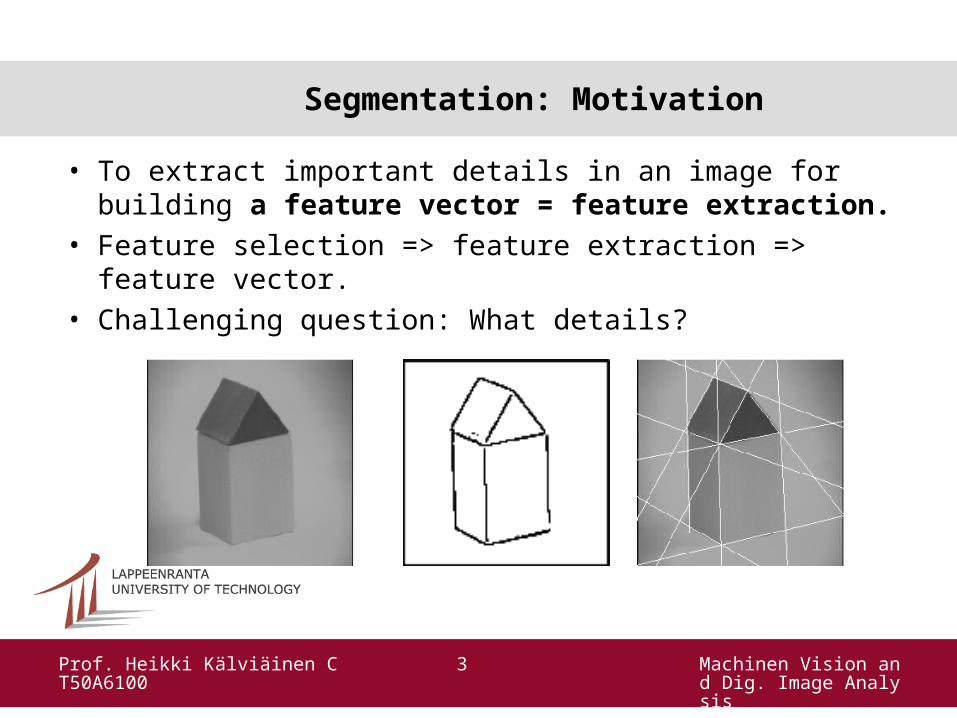
Segmentation: Motivation
• To extract important details in an image for building a feature vector = feature extraction.
• Feature selection => feature extraction => feature vector. • Challenging question: What details?
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
4
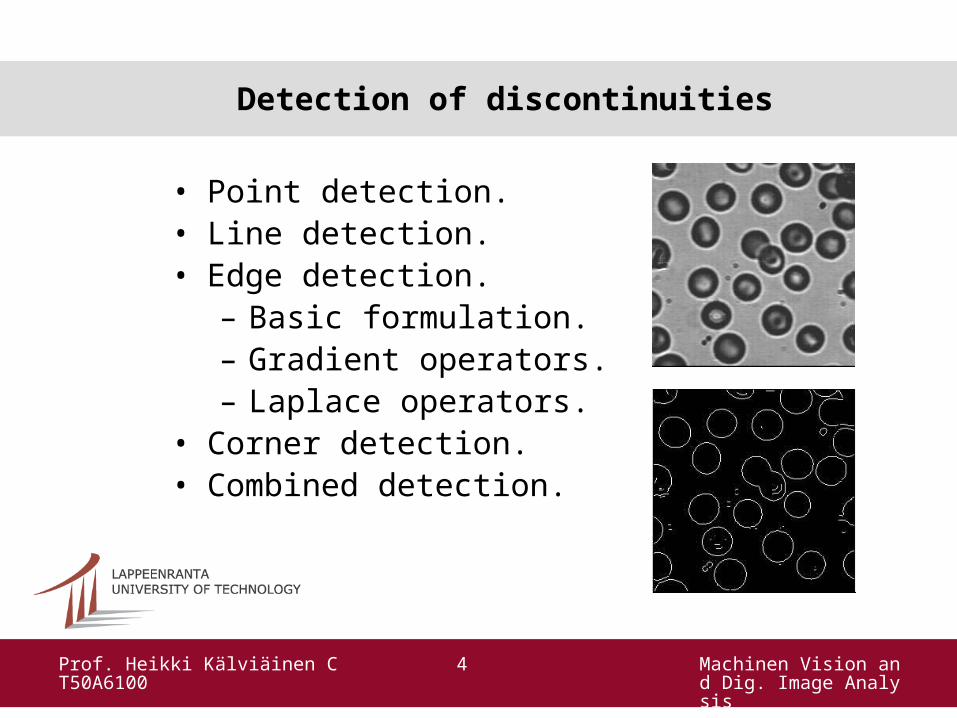
Detection of discontinuities
• Point detection.• Line detection.• Edge detection.
– Basic formulation.– Gradient operators.– Laplace operators.
• Corner detection.• Combined detection.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
5
Point detection
• Detection of isolated points:a) Apply the mask
-1 -1 -1-1 8 -1
-1 -1 -1b) Threshold by using
abs(R) > T where R is ∑w_i z_i (w_i mask, z_i point at location i)

Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
6
Line detection
• Directed filters (lines of one pixel thick):
Horizontal +45 °-1 -1 -1 -1 -1 2
2 2 2 -1 2 -1 -1 -1 -1 2 -1 -1
Vertical -45 ° -1 2 -1 2 -1 -1 -1 2 -1 -1 2 -1 -1 2 -1 -1 -1 2
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
7
Edge detection
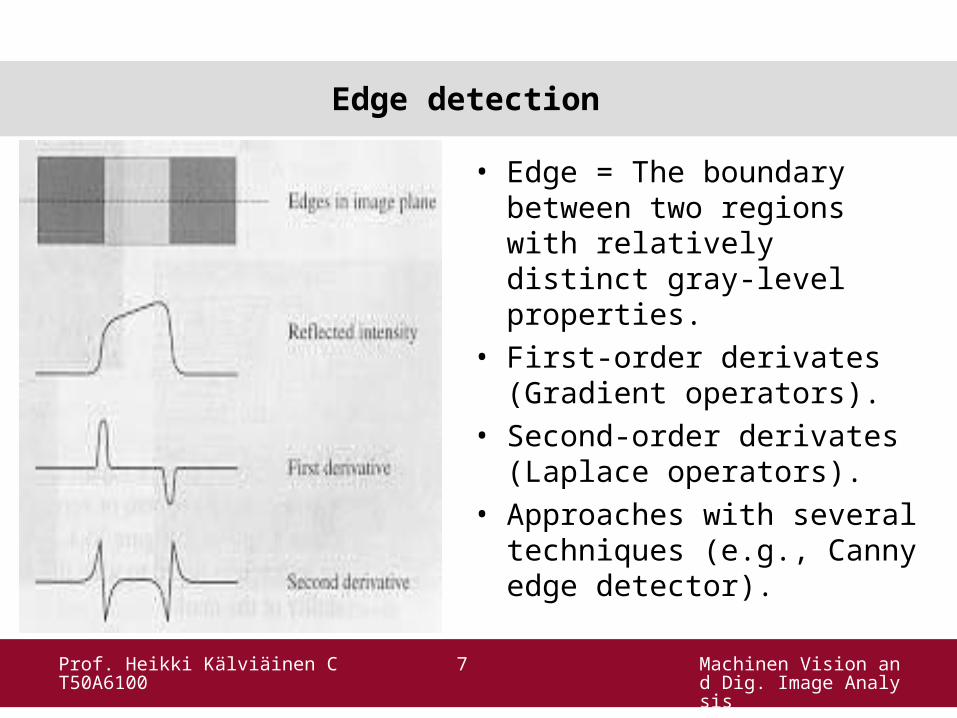
• Edge = The boundary between two regions with relatively distinct gray-level properties.
• First-order derivates (Gradient operators).
• Second-order derivates (Laplace operators).
• Approaches with several techniques (e.g., Canny edge detector).
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
8
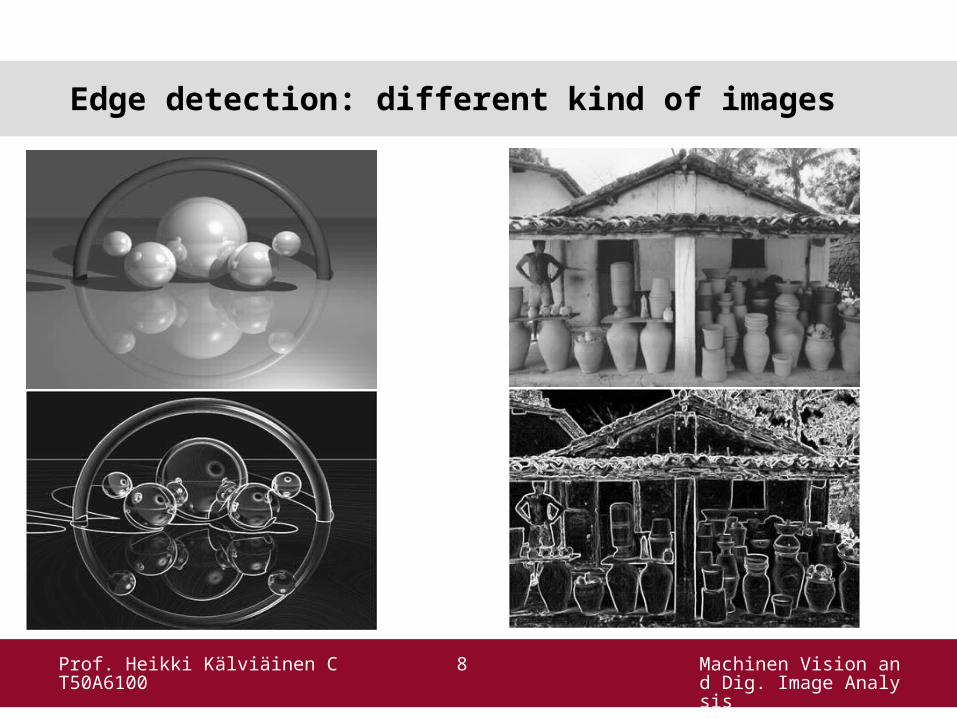
Edge detection: different kind of images
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
9
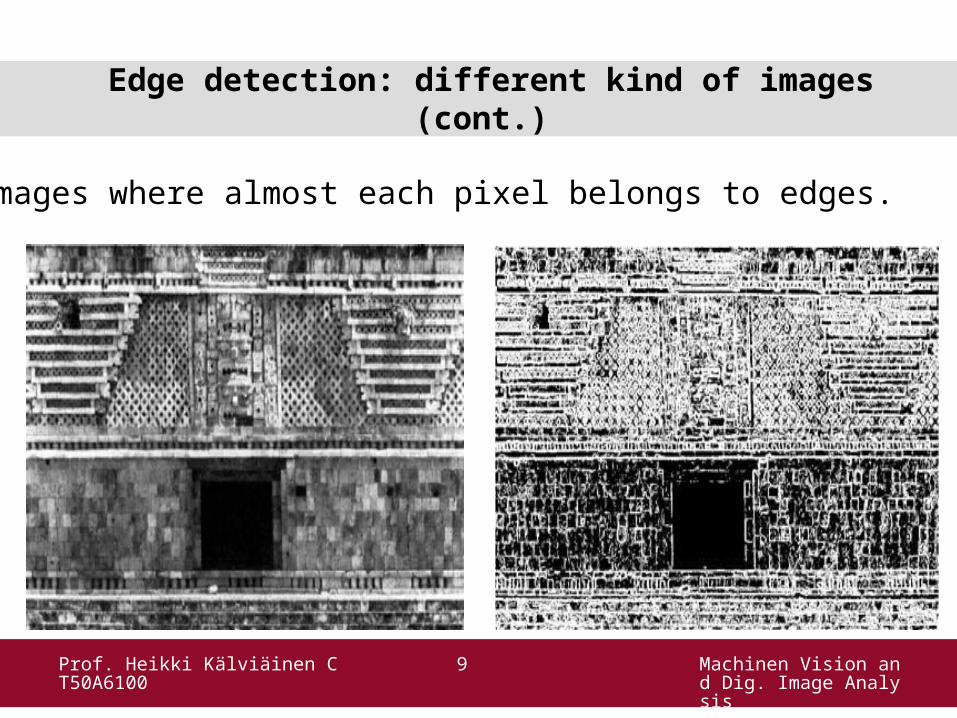
Edge detection: different kind of images (cont.)
Images where almost each pixel belongs to edges.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
10
Edge detection: Gradient operators
• Gradient of f(x,y):
G_x ∂f/∂x
df = =
G_y ∂f/∂y
• Magnitude: mag(df)= ((G_x)^2 + (G_y)^2)^(-1/2)
approximation df = abs(G_x) + abs (G_y)
• Direction: α(x,y) = tan^{-1} (G_y/G_x)
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
11
Gradient operators
• Roberts: 1 0 0 1
0 -1 1 0• Prewitt:
-1 -1 -1 -1 0 1
0 0 0 -1 0 1
1 1 1 -1 0 1• Sobel:
-1 -2 -1 -1 0 1
0 0 0 -2 0 2
1 2 1 -1 0 1

Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
12
Edge detection: 3x3 Prewitt operator
• Horizontal mask (left top). • Vertical mask (left bottom). • Sum of the two masks (right middle).
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
13
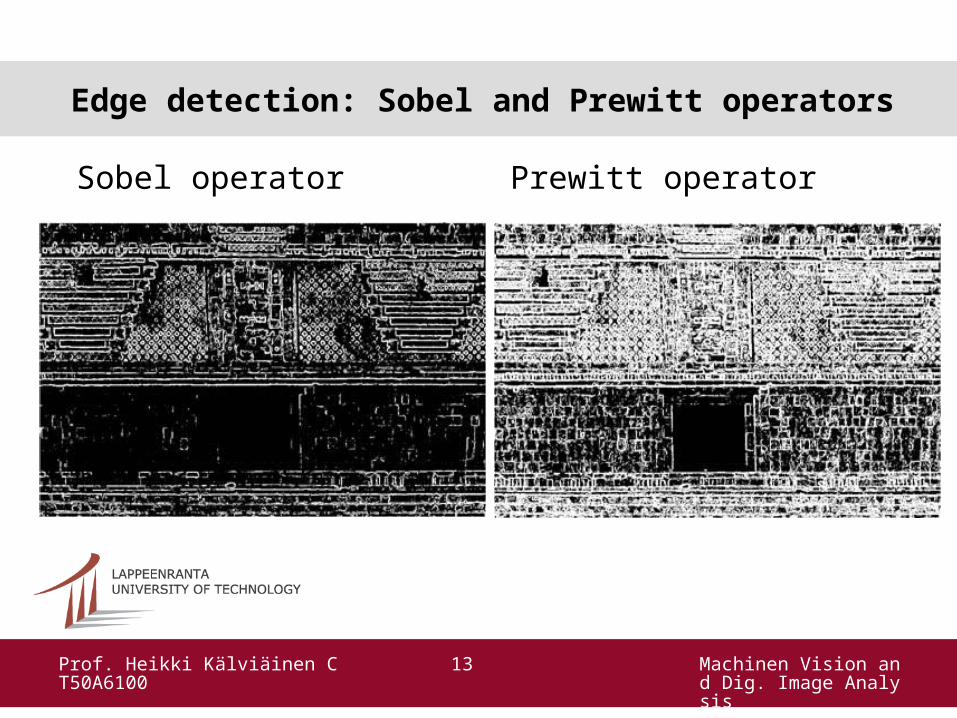
Edge detection: Sobel and Prewitt operators
Sobel operator Prewitt operator
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
14
Laplace operators
• Laplacian of a 2-D function (second derivate operator):
d^2 f = ∂^2f/∂x^2 + ∂f^2/∂y^2
• 3 x 3 mask: d^2 f = 4 z_5 – (z_2 + z_4 + z_6 + z_8)
0 -1 -0 -1 4 -1
0 -1 0
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
15
Laplace operators (cont.)
• Sensitive to noise. • Finding the location of edges using its zero-crossing property. • Convolve an image with the Laplacian of 2-D Gaussian function of
the form
h(x,y) = exp(-(x^2+y^2)/2σ^2)
where σ is the standard deviation. • Let r^2 = x^2 + y^2:
d^2 h = (r^2-σ^2)/σ^4 exp(-(r^2)/2σ^2)
zero-crossings at r = ±σ
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
16
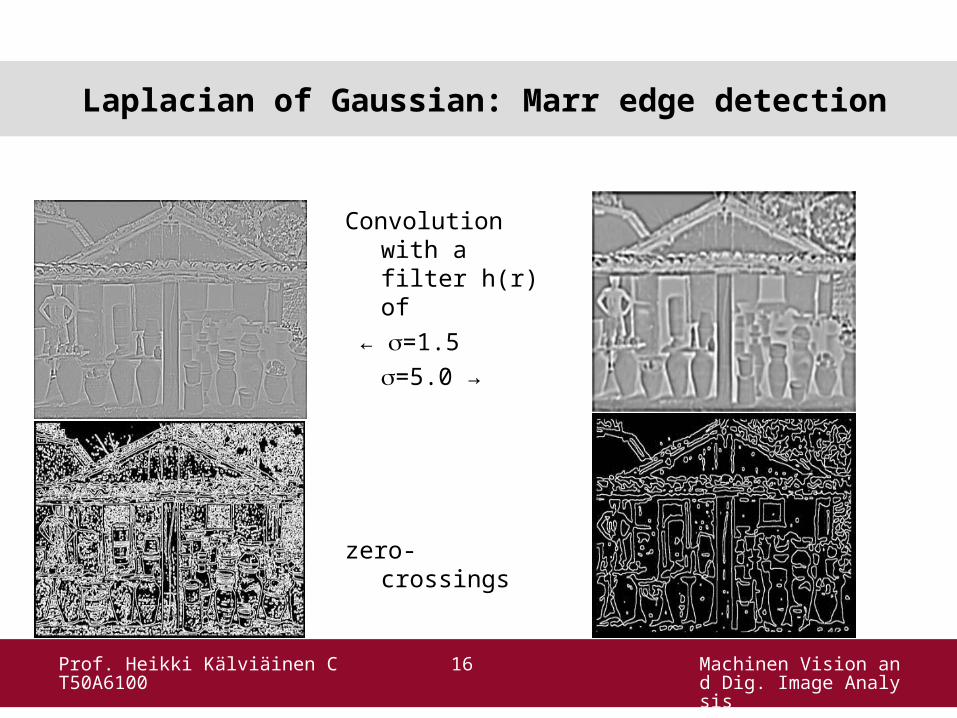
Laplacian of Gaussian: Marr edge detection
Convolution with a filter h(r) of
← =1.5
=5.0 →
zero-crossings
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
17
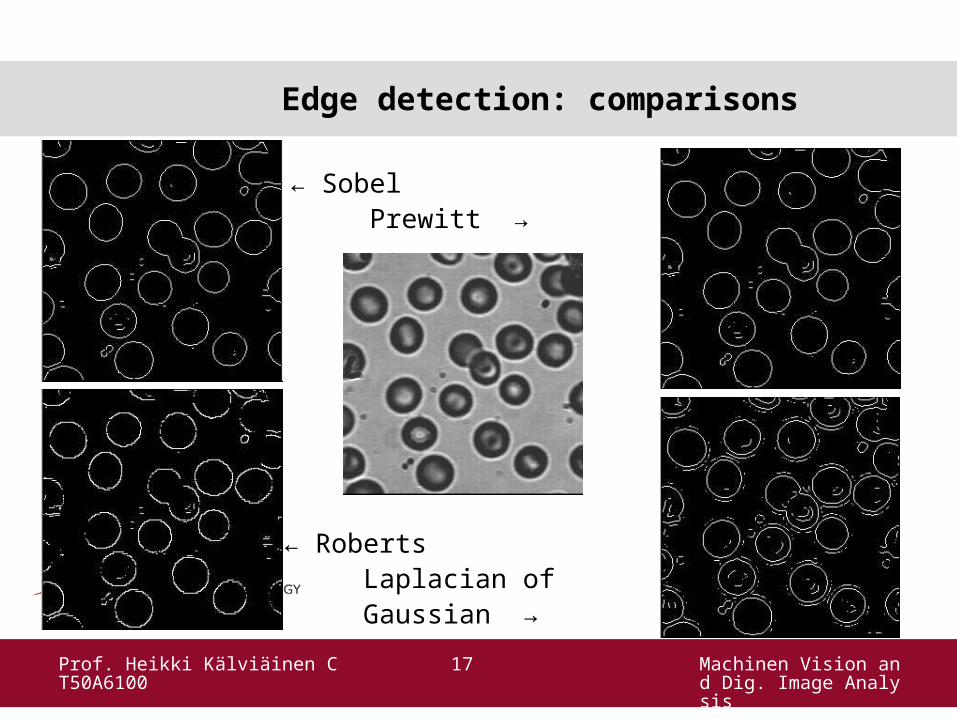
Edge detection: comparisons
← Sobel Prewitt →
← Roberts Laplacian of Gaussian →
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
18
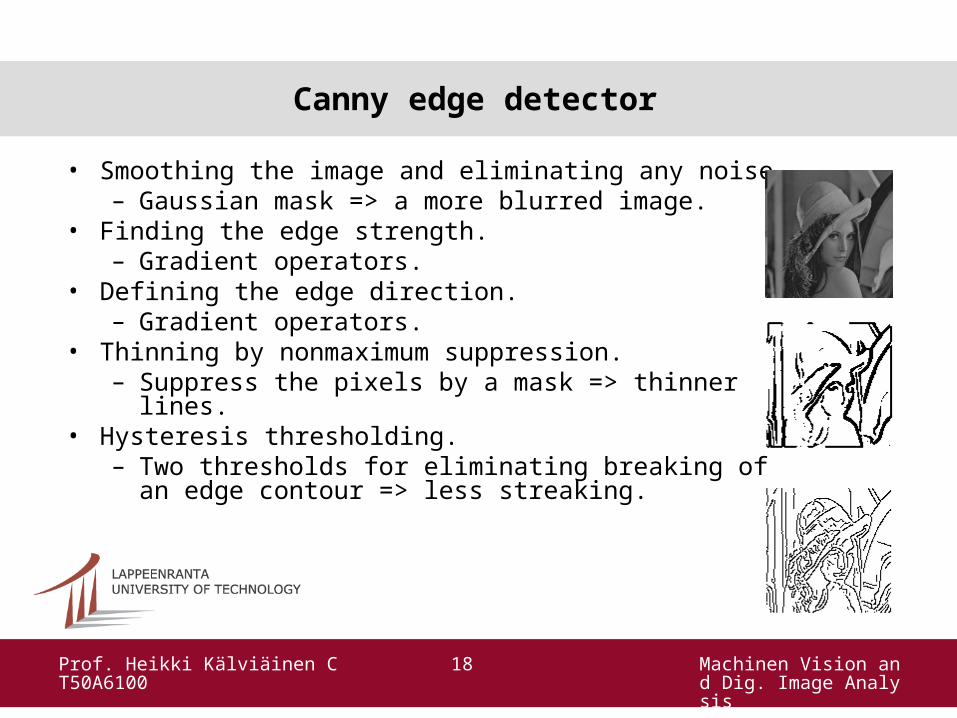
Canny edge detector
• Smoothing the image and eliminating any noise. – Gaussian mask => a more blurred image.
• Finding the edge strength.– Gradient operators.
• Defining the edge direction.– Gradient operators.
• Thinning by nonmaximum suppression. – Suppress the pixels by a mask => thinner lines.
• Hysteresis thresholding.– Two thresholds for eliminating breaking of an edge
contour => less streaking.

Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
19
Harris corner detector
• Corners are usually very suitable interest points. • As the intersection of two edges or as the region of two different
strong edge orientations. • Based on the local auto-correlation function of a signal C(x,y)
which measures the local changes of the signal with patches shifted by a small amount in different directions.
• Corner response H(x) defined as a function of C(x,y). • Interest points can be found as local maxima in the corner
response.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
20
Edge linking and boundary detection
• From intensity discontinuities to more general segmentation. – For example, from edge pixels to line segments.
• Local processing.– Analysis of a small neighborhood:
Strength and direction of
the gradient of edge pixels.• Global processing:
– Analysis of the whole image:
Global relationships between pixels. – Hough Transform.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
21
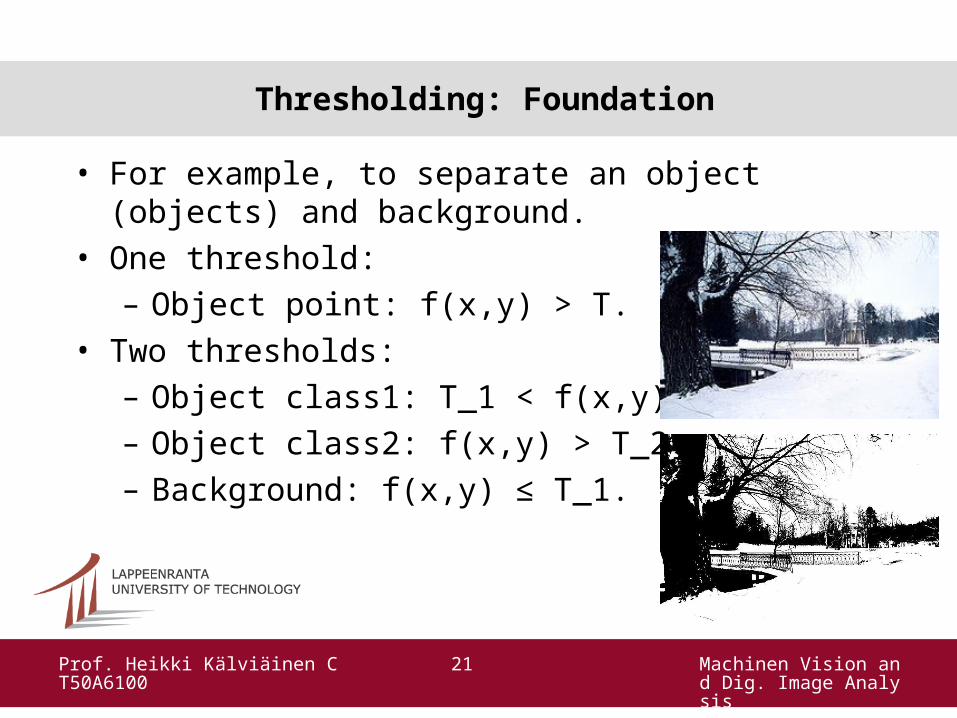
Thresholding: Foundation
• For example, to separate an object (objects) and background.
• One threshold: – Object point: f(x,y) > T.
• Two thresholds: – Object class1: T_1 < f(x,y) < T_2.– Object class2: f(x,y) > T_2. – Background: f(x,y) ≤ T_1.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
22
Thresholding: Foundation (cont.)
• Operation.
T = T[x, y, p(x,y), f(x,y)]
where
f(x,y) is the gray-level point of (x,y)
p(x,y) denotes some local property of this point (e.g., the average gray-level of a neighborhood centered on (x,y))
• A thresholded image is g(x,y) is defined as
g(x,y) = 1 if f(x,y) > T
0 if f(x,y) ≤ T.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
23
Thresholding: Role of illumination
• An image f(x,y) is a product of a reflectance component r(x,y) and an illumination component i(x,y).
• Original image => suitable histogram to thresholding
Original image + illumination changes =>
unsuitable histogram to thresholding• Ready for illumination changes?
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
24
Thresholding: Global and optimal
• How:– Simple global thresholding: just select T manually.– Optimal thresholding: optimally by probability densities (Gaussian)
p(z) = exp(-(z-μ)^2 / (2σ^2)) / (√(2πσ)) where μ is the mean value and σ is the standard deviation
• Mixture probability density of two classes: p(z) = P_1 p_1(z) + P_2 p_2(z)where P_1 and P_2 are the a priori probabilities P_1 + P_2 = 1.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
25
Thresholding: Global and optimal (cont.)
• The threshold value for which error is minimal
P_1 p_1(T) = P_2 p_2(T)
• If σ = σ_1 = σ_2 by solving the equation, T is obtained as
T = (μ_1 + μ_2)/2 + (σ^2/(μ_1 - μ_2)) ln(P_2/P_1)
• If P_1=P_2 the optimal threshold is the average of the means.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
26
Thresholding: Global and optimal (cont.)
• Generally P_1 p_1(T) = P_2 p_2(T) can be formulated as
AT^2 + BT + C = 0
where
A = σ_1^2 - σ_2^2
B = 2 (μ_1 σ_1^2 - μ_2 σ_2^2)
C = σ_1^2 μ_2^2 - σ_2^2 μ_1^2 + 2 σ_1^2 σ_2^2 ln(σ_2 P_1/ σ_1 P_2)
• Thus T is solved as
T = -B ± √(B^2 - 4 AC)/(2A)

Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
27
Thresholding: Categories of methods
Mehmet Sezgin, Bulent Sankur, Survey over image thresholding
techniques and quantitative performance evaluation, Journal of
Electronic Imaging, Vol. 13, No. 1, 2004, pp. 146-165: • Histogram shape-based methods. • Clustering-based methods. • Entropy-based methods. • Object attribute-based methods. • Spatial methods.• Local methods.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
28
Region-oriented segmentation
• Region growing. – Bottom-up. – Pixel by pixel.– Pixel aggregation.
• Region splitting and merging.– Top-down.– Subdivisions of the image.– Split and merge.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
29
Region growing
• Pixel aggregation: start with a set of seed points and from these grow regions by appending to each seed point those neighboring pixels that have similar properties (such as gray level, texture, color).
• Which seed points? • Similar properties? Should the criterion be
constant or change as a function of current pixels.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
30
Region splitting and merging
• Subdivide an image initially into a set of arbitrary, disjointed regions and then merge and/or split the regions in an attempt to satisfy given conditions.
• Method using a logical predicate P(R) over the points in set R (similar values or not):1. Split into four disjointed quadrants any region R_i
where P(R_i) = FALSE.2. Merge any adjacent regions R_j and R_k for which
P(R_j U R_K) = TRUE.3. Stop when no further merging or splitting is possible.
Machinen Vision and Dig. Image Analysis
Prof. Heikki Kälviäinen CT50A6100
31
Summary
Image acquisition => digital image
↓
Preprocessing => better image
↓
Segmentation => features for classification/clustering.