Embed Size (px)
Citation preview
-
BỘ GIÁO DỤC VÀ ĐÀO TẠO BỘ CÔNG THƯƠNG
VIỆN NGHIÊN CỨU ĐIỆN TỬ - TIN HỌC - TỰ ĐỘNG HOÁ
THUẬT TOÁN ƯỚC LƯỢNG CÁC THAM SỐ
CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN
LUẬN ÁN TIẾN SỸ KỸ THUẬT
HÀ NỘI - 2012
-
BỘ GIÁO DỤC VÀ ĐÀO TẠO BỘ CÔNG THƯƠNG
VIỆN NGHIÊN CỨU ĐIỆN TỬ - TIN HỌC - TỰ ĐỘNG HOÁ
THUẬT TOÁN ƯỚC LƯỢNG CÁC THAM SỐ
CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN
Chuyên ngành : Kỹ thuật Viễn thông
Mã số : 62 52 70 05
LUẬN ÁN TIẾN SỸ KỸ THUẬT
HÀ NỘI - 2012
i
LỜI CAM ĐOAN
Tôi xin cam đoan luận án: "Thuật toán ước lượng các tham số của tín
hiệu trong hệ thống thông tin vô tuyến" là công trình nghiên cứu của riêng
tôi.
Các số liệu, kết quả trình bày trong luận án là trung thực, một phần đã
được công bố trên các tạp chí khoa học chuyên ngành, kỷ yếu hội nghị
khoa học trong nước và quốc tế.
Phần còn lại chưa được công bố trong bất kỳ công trình nghiên cứu
nào.
Hà Nội, ngày 05 tháng 12 năm 2012NGHIÊN CỨU SINH
Phạm Duy Phong
ii
LỜI CẢM ƠN
Tôi xin bày tỏ lòng biết ơn sâu sắc tới PGS.TS. Vũ Văn Yêm người
đã tận tình hướng dẫn tôi trong suốt quá trình thực hiện và hoàn thành
luận án. Đặc biệt, sự chỉ bảo tận tình và tạo điều kiện thuận lợi trong các
hoạt động nghiên cứu khoa học của PGS.TS. Vũ Văn Yêm có ý nghĩa vô
cùng to lớn để tôi có thể hoàn thành Luận án này.
Xin trân trọng cảm ơn GS.TSKH. Nguyễn Xuân Quỳnh đã định
hướng và có những chỉ dẫn quan trọng khi xây dựng đề cương nghiên cứu,
cũng như trong quá trình thực hiện Luận án.
Xin trân trọng cảm ơn sự giúp đỡ tận tình của Viện Nghiên cứu Điện
tử- Tin học- Tự động hóa trong quá trình học tập và nghiên cứu tại Viện.
Xin chân thành cảm ơn Trường Đại học Điện lực đã hỗ trợ, giúp đỡ
để tôi có điều kiện và thời gian học tập, nghiên cứu.
Cuối cùng tôi xin cảm ơn gia đình, bạn bè, đồng nghiệp và người
thân đã giúp đỡ, chia sẻ, khích lệ, động viên để tôi có thể hoàn thành luận
án này.
Hà Nội, ngày 05 tháng 12 năm 2012NGHIÊN CỨU SINH
Phạm Duy Phong
iii
MỤC LỤC
LỜI CAM ĐOAN ....................................................................................... i
MỤC LỤC ................................................................................................ iii
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT ...................................... vi
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ .................................................... xi
DANH MỤC CÁC BẢNG BIỂU............................................................ xiii
MỞ ĐẦU ....................................................................................................1
CHƯƠNG 1: TỔNG QUAN VỀ ƯỚC LƯỢNG CÁC THAM SỐ CỦA
TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN .....................9
1.1. Tổng quan về ước lượng các tham số của tín hiệu trong hệ thống thông
tin vô tuyến .................................................................................................9
1.2. Kỹ thuật ước lượng DOA ...................................................................11
1.2.1. Điều kiện và những thông số ảnh hưởng đến việc ước lượng
DOA................................................................................................... 11
1.2.2. Công thức tổng quát của bài toán DOA..................................... 12
1.2.3. Phương trình ma trận cho dàn ăng ten ....................................... 15
1.2.4. Ma trận hiệp phương sai của tín hiệu thu từ dàn ăng ten: .......... 15
1.2.5. Thuật toán ước lượng DOA....................................................... 17
1.2.6. Ước lượng DOA của các tín hiệu tương quan............................ 17
1.3. Kỹ thuật ước lượng tần số CFO và FDOA..........................................21
1.3.1. Kỹ thuật ước lượng CFO........................................................... 21
1.3.2. Kỹ thuật ước lượng FDOA........................................................ 22
1.4. Kỹ thuật cảm nhận phổ dựa trên các tham số ước lượng.....................24
1.4.1. Kỹ thuật phân tập ở phía thu ..................................................... 24
1.4.2. Kỹ thuật cảm nhận phổ kết hợp................................................. 26
1.5. Đặt vấn đề nghiên cứu:.......................................................................27
Kết luận chương 1 .....................................................................................28
iv
CHƯƠNG 2: THUẬT TOÁN ƯỚC LƯỢNG MỘT THAM SỐ CỦA TÍN
HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN...........................29
2.1. Đề xuất thuật toán ước lượng FDOA với độ phân giải cao cho hệ thống
thông tin vô tuyến tiên tiến........................................................................29
2.1.1. Tổng quan chung về thuật toán ................................................. 29
2.1.2. Mô hình toán học ...................................................................... 30
2.1.3. Kết quả mô phỏng..................................................................... 32
2.1.4. Phân tích độ phân giải của thuật toán ........................................ 34
2.1.5. Nhận xét.................................................................................... 37
2.2. Đề xuất giải pháp ước lượng dịch tần sóng mang CFO trong hệ thống
thông tin vô tuyến MIMO .........................................................................38
2.2.1. Giới thiệu.................................................................................. 38
2.2.2. Mô hình hệ thống...................................................................... 40
2.2.3. Đề xuất phương pháp ước lượng dịch tần số ............................. 41
2.2.4. Kết quả mô phỏng..................................................................... 43
2.3. Đề xuất kiến trúc hệ thống thu cho bài toán ước lượng DOA .............46
2.3.1. Giới thiệu.................................................................................. 46
2.3.2. Hệ thống tìm hướng đơn kênh và xử lý tín hiệu ........................ 48
2.3.3. Kết quả mô phỏng..................................................................... 51
2.3.4. Nhận xét.................................................................................... 52
Kết luận chương 2 .....................................................................................53
CHƯƠNG 3: THUẬT TOÁN ƯỚC LƯỢNG ĐỒNG THỜI NHIỀU
THAM SỐ CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ
TUYẾN.....................................................................................................54
3.1. Thuật toán ước lượng đồng thời hướng sóng tới trong mặt phẳng
phương vị, tần số Doppler và trễ truyền sóng ............................................54
3.1.1. Giới thiệu.................................................................................. 54
3.1.2. Xử lý tín hiệu không gian - thời gian và tần số.......................... 55
v
3.1.3. Kết quả mô phỏng..................................................................... 59
3.2. Thuật toán ước lượng đồng thời hướng sóng tới theo góc phương vị và
góc ngẩng..................................................................................................63
3.2.1. Giới thiệu.................................................................................. 63
3.2.2. Quy trình ước lượng hướng sóng tới của tín hiệu trong mặt phẳng
phương vị và mặt phẳng đứng............................................................. 64
3.2.3. Kết quả mô phỏng..................................................................... 66
Kết luận chương 3 .....................................................................................69
CHƯƠNG 4: GIẢI PHÁP CẢM NHẬN PHỔ TRONG HỆ THỐNG
THÔNG TIN VÔ TUYẾN ĐA ĂNG TEN ...............................................72
4.1. Đề xuất kỹ thuật cảm nhận phổ dựa trên các tham số ước lượng ........73
4.1.1. Giới thiệu.................................................................................. 73
4.1.2. Mô hình hệ thống và bộ tách sóng năng lượng .......................... 74
4.1.3. Máy thu vô tuyến nhận thức...................................................... 76
4.1.4. Ước lượng tín hiệu, nhiễu và các tham số không tập trung........ 79
4.1.5. Kết quả mô phỏng..................................................................... 81
4.2. Đề xuất giải pháp cảm nhận phổ dùng kỹ thuật xử lý song song và luật
OR ............................................................................................................84
4.2.1. Giới thiệu.................................................................................. 84
4.2.2. Các máy thu vô tuyến nhận thức đa ăng ten và đơn ăng ten ...... 85
4.2.3. Hệ thống sử dụng kỹ thuật xử lý song song và luật OR............. 89
4.2.4. Hệ thống đề xuất sử dụng hai ăng ten........................................ 90
4.2.5. Kết quả mô phỏng..................................................................... 93
Kết luận chương 4 .....................................................................................96
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN .................................................97
DANH MỤC CÁC CÔNG TRÌNH ĐÃ CÔNG BỐ .................................99
TÀI LIỆU THAM KHẢO .......................................................................100
vi
DANH MỤC CÁC KÝ HIỆU, CHỮ VIẾT TẮT
STT Viết tắt Tiếng Anh Tiếng Việt
1 ADC Analog to Digital Converter
Bộ biến đổi tương tự - số
2 ABF Adaptive Beam-Forming Định dạng búp sóng thích nghi
3 AOA Angle of Arrival Góc sóng tới
4 AR Autoreg Ressive Tự hồi quy
5 ARMA Autoregressive Moving Average
Tự hồi quy trung bình động
6 AWGN Additive White Gaussian Noise
Nhiễu Gauss trắng cộng
7 BER Bit Error Rate Tỷ lệ lỗi bít
8 BLER Block Error Rate Tỷ lệ lỗi khối
9 CDF Cumulative Distribution Function
Hàm phân bố tích luỹ
10 CFO Carrier Frequency Offset Dịch tần số sóng mang
11 CFR Channel Frequency Response
Đáp ứng tần số của kênh
12 CIR Channel Impulse Response Đáp ứng xung của kênh
13 CNR Carrier to Noise Ratio Tỷ số công suất sóng mang trên tạp âm
14 CR Cognitive Radio Vô tuyến nhận thức
15 CSI Channel State Information Thông tin trạng thái kênh
16 CSM Coherent Signal Subspace Method
Phương pháp không gian con tín hiệu tương quan
17 DF Direction Finding Tìm hướng
18 DFT Discrete Fourier Transform Biến đổi Fourier rời rạc
19 DIV Diversity Phân tập
vii
STT Viết tắt Tiếng Anh Tiếng Việt
20 DOA Direction Of Arrival Hướng sóng tới
21 DOD Direction Of Departure Hướng sóng đi
22 DS Discrete Source Nguồn rời rạc
23 DSP Digital Signal Processing Xử lý tín hiệu số
24 EGC Equal Gain Combining Kết hợp tăng ích đều
25 ES Extended Source Nguồn mở rộng
26 ESPRIT Estimation of Signal Parameters via Rotational Invariance Techniques
Ước lượng tham số tín hiệu dựa vào kỹ thuật bất biến quay
27 FBSS Forward-Backward Spatial Smoothing
Làm mượt miền không gian thuận nghịch
28 FDD Frequency Division Duplex
Song công phân chia theo tần số
29 FDOA Frequency Difference Of Arrival
Dịch tần sóng tới
30 FFT Fast Fourier Transform Biến đổi Fourier nhanh
31 HLST Horizontal Layered Space Time
Không gian Thời gian phân tầng ngang
32 HLSTC Horizontal Layered Space Time Code
Mã không gian thời gian phân tầng ngang
33 I.I.D Independently Identically Distributed
Phân bố độc lập giống nhau
34 ICI Inter Carrier Interference Nhiễu liên sóng mang
35 IDFT Inverse Discrete Fourier Transform
Biến đổi Fourier ngược rời rạc
36 IFFT Inverse Fast Fourier Transform
Biến đổi Fourier ngược nhanh
37 ISI Inter Symbol Interference Nhiễu liên ký hiệu

viii
STT Viết tắt Tiếng Anh Tiếng Việt
38 ISM Industrial, Scientific and Medical
Y tế, khoa học và công nghiệp
39 LMMSE Linear Minimum Mean Square Error
Lỗi bình phương tối thiểu tuyến tính
40 LMS Least Mean Square Trung bình bình phương nhỏ nhất
41 LOS Line Of Sight Tầm nhìn thằng
42 LS Least Squares Bình phương cực tiểu
43 LST Layered Space Time Không gian thời gian theo tầng
44 LSTC Layered Space Time Code Mã không gian thời gian theo tầng
45 MAI Multiple AntennaInterference
Nhiễu đa ăng ten
46 MAP Maximum Probability Tối đa hậu nghiệm
47 MIMO Multiple Input Multiple Output
Nhiều đầu vào nhiều đầu ra
48 MISO Multiple Input Single Output
Nhiều đầu vào một đầu ra
49 ML Maximum Likelihood Khả năng lớn nhất
50 MLSE Maximum Likelihood Sequence Estimation
Phương pháp ước lượng chuỗi khả năng lớn nhất
51 MMSE Minimum Mean Square Error
Lỗi bình phương trung bình tối thiểu
52 MPC Multi- Path Components Các thành phần đa đường
53 MRC Maximum Ratio Combing Kết hợp tỷ số tối đa
54 MSE Mean Square Error Lỗi bình phương trung bình
55 MSS Modified Spatial Smoothing
Phương pháp làm mượt miền không gian cải tiến
ix
STT Viết tắt Tiếng Anh Tiếng Việt
56 MUSIC MUltiple SIgnal Classification
Phân loại tín hiệu đa đường
57 MVDR Minimum Variance Distortionless Response
Đáp ứng không méo phương sai cực tiểu
58 OFDM Orthogonal Frequency Division Multiplexing
Ghép kênh phân chia theo tần số trực giao
59 PDF Probability Density Function
Hàm mật độ xác suất
60 PPM Parts Per Million Phần triệu
61 PSD Power Spectrum Density Mật độ phổ công suất
62 QoS Quality of Service Chất lượng dịch vụ
63 RF Radio Frequency Tần số vô tuyến
64 RMS Root Mean Square Căn quân phương
65 RMSE Root Mean Square Error Lỗi căn quân phương
66 RT Ray Tracing Thuật toán tìm tia
67 SC Selection Combining Kỹ thuật kết hợp lựa chọn
68 SDR Software Defined Radio Vô tuyến xác định bằng phần mềm
69 SIR Signal to Interference Ratio
Tỷ số tín hiệu trên nhiễu
70 SISO Single Input Single Output Một đầu vào một đầu ra
71 SM Spatial Multiplexing Ghép kênh không gian
72 SNR Signal to Noise Ratio Tỷ số tín hiệu trên tạp âm
73 SDMA Space Division Multi Access
Đa truy nhập phân chia theo không gian
74 SS Spatial Smoothing Kỹ thuật làm mịn miền không gian
75 STBC Space Time Block Code Mã hóa khối không gian thời
x
STT Viết tắt Tiếng Anh Tiếng Việt
gian
76 STC Space Time Coding Mã hóa không gian thời gian
77 STS Space Time Spreading Trải phổ không gian thời gian
78 STTC Space Time Trellis Code Mã hóa xoắn không gian thời gian thời gian
79 SVD Singular Value Decomposition
Phân tích giá trị riêng
80 TDD Time Division Duplex Song công phân chia theo thờigian
81 TDMA Time Division Multiple Access
Đa truy nhập phân chia theo thời gian
82 TLS Total Least Squares Tổng bình phương cực tiểu
83 TOA Time Of Arrival Thời gian tới
84 TOPS Test of orthogonality of projected subspaces
Kiểm tra tính trực giao của không gian con hình chiếu
85 UE User Equipment Thiết bị đầu cuối
86 ULA Uniform Linear Array Dàn ăng ten đồng dạng tuyến tính
87 VLST Vertical Layered Space Time
Không gian thời gian phân tầng ngang
88 VLSTC Vertical Layered Space Time Code
Lập mã không gian thời gian phân tầng ngang
89 ZF Zero Forcing Ép về giá trị không
90 WLAN Wire Local Area Network Mạng cục bộ không dây
xi
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ
Hình 1.1: Mô hình sóng truyền lan nhận được bởi các phần tử ăng ten tuyến
tính đồng nhất bố trí trên một đường thẳng ...............................................13
Hình 1.2: Sơ đồ khối hệ thống thu ước lượng hướng sóng tới .................. 13
Hình 1.3. Giản đồ sắp xếp các giá trị riêng tín hiệu.................................. 17
Hình 2.1: Mô hình hệ thống MIMO ......................................................... 30
Hình 2.2: Kết quả mô phỏng sử dụng thuật toán 1 ................................... 33
Hình 2.3: Kết quả mô phỏng sử dụng thuật toán 2 ................................... 33
Hình 2.4: Kết quả mô phỏng sử dụng FFT ............................................... 34
Hình 2.5: Ảnh hưởng của SNR lên độ phân giải tần số ............................ 35
Hình 2.6: Độ phân giải của FFT............................................................... 37
Hình 2.7: Độ phân giải của thuật toán 1 đề xuất....................................... 37
Hình 2.8: Mô hình hệ thống MIMO để ước lượng CFO ........................... 40
Hình 2.9: RMS của f0 đã ước lượng theo số lượng ăng ten phát khác nhau
................................................................................................................. 44
Hình 2.10: Các kết quả mô phỏng cho thuật toán MUSIC........................ 45
Hình 2.11: Độ phân giải tần số của thuật toán MUSIC............................. 46
Hình 2.12: Hệ thống tìm hướng đơn kênh ................................................ 48
Hình 2.13: Xử lý tín hiệu số ..................................................................... 49
Hình 2.14: Kết quả ước lượng với 2 tín hiệu không tương quan............... 51
Hình 3.1. Mô hình sóng phẳng trong dàn ăng ten đồng dạng tuyến tín bố
trí theo một đường thẳng.......................................................................... 55
Hình 3.2 Sơ đồ tính ma trận hiệp phương sai của SS-XXR̂ cho N = 6, M = 7,
subL = 2 và subM = 4 .............................................................................. 59
Hình 3.4. Hiển thị 3D kết quả ước lượng với 6 tín hiệu tương quan khi
chưa áp dụng kỹ thuật làm mịn không gian cải tiến.................................. 61
Hình 3.5: Hiển thị 3D kết quả ước lượng với 6 tín hiệu tương quan khi áp
dụng kỹ thuật làm mịn không gian cải tiến............................................... 62
xii
Hình 3.6: Ước lượng tần số Doppler bằng MUSIC và 3D-SS cải tiến ...... 63
Hình 3.7: Dàn ăng ten phẳng cho việc ước lượng hướng sóng tới DOA... 64
Hình 3.8. Sơ đồ các phẩn tử của Rxx được tính toán và lựa chọn các mảng
con My= 6, Mz = 7, subMy = 2 và subMz = 4. ............................................ 66
Hình 3.9. Kết quả mô phỏng 3D cho một tín hiệu ở )35,45(),( o ........ 68
Hình 3.10. Kết quả mô phỏng 3D cho ba tín hiệu không tương quan tới các
góc (-40°, 20°), (0°, 40°), (40°, 60°)......................................................... 68
Hình 3.11. Kết quả ước lượng góc phương vị và góc ngẩng của các nguồn
tín hiệu tương quan khi không dùng kỹ thuật làm mịn không gian cải tiến69
Hình 3.12. Kết quả mô phỏng 3D cho ba tín hiệu không tương quan tới các
góc (-30°, 20°), (0°, 40°), (40°, 70°) khi áp dụng kỹ thuật làm mịn không
gian cải tiến.............................................................................................. 69
Hình 4.1: Bộ tách sóng năng lượng trong cảm nhận phổ .......................... 74
Hình 4.2: Sơ đồ hệ thống sử dụng trọng số lượng tử ................................ 78
Hình 4.3: Trọng số lượng tử được chọn ngẫu nhiên ................................. 81
Hình 4.4: PDF của giá trị kiểm tra trong 3 mô hình.................................. 82
Hình 4.5:Hoạt động của ba hệ thống khi cố định PFA ............................... 82
Hình 4.6: Hoạt động của 3 hệ thống khi cố định PMD và thay đổi SNR..... 83
Hình 4.7: Hoạt động của 3 hệ thống khi cố định SNR và thay đổi PFA ..... 83
Hình 4.8: Kỹ thuật xử lý song song trong cảm nhận phổ.......................... 89
Hình 4.9: Hệ thống đề xuất ...................................................................... 91
Hình 4.10: Tín hiệu thu được trong hệ thống kết hợp............................... 92
Hình 4.11: PFA = 0.01 và 2T = 10 mẫu ..................................................... 94
xiii
DANH MỤC CÁC BẢNG BIỂU
Bảng 2.1: Các thông số ảnh hưởng tới độ phân giải .................................. 36
Bảng 4.1: PFA = 0,001 và 2T = 30 mẫu...................................................... 94
Bảng 4.2: PFA = 0,005 và SNR = -5 dB ..................................................... 95
Bảng 4.3: PD = 0,95 và SNR = -3 dB ........................................................ 95
1
MỞ ĐẦU
Trong thời đại phát triển bùng nổ của các hệ thống thông tin vô
tuyến, nhu cầu về chất lượng, dung lượng, các dịch vụ đa phương tiện và
tính đa dạng trong các hệ thống thông tin không dây như thông tin di động,
internet đang tăng lên một cách nhanh chóng trên phạm vi toàn thế giới.
Tuy nhiên, phổ tần số vô tuyến là hữu hạn, muốn tăng dung lượng bắt buộc
phải tăng hiệu quả sử dụng phổ tần số. Vì vậy, việc nghiên cứu, ứng dụng
các công nghệ và kỹ thuật tiên tiến để đáp ứng nhu cầu này luôn là một đòi
hỏi cấp thiết. Một trong những kỹ thuật có thể giúp cải thiện đáng kể chỉ
tiêu, dung lượng, tốc độ dữ liệu đỉnh và phạm vi liên lạc của hệ thống được
tập trung nghiên cứu trên thế giới trong thời gian gần đây chính là kỹ thuật
đa đầu vào đa đầu ra MIMO (Multiple Input Multiple Output) hay kỹ thuật
sử dụng nhiều ăng ten phát và nhiều ăng ten thu. Hệ thống MIMO có thể
xem như một hệ thống ghép nhiều kênh con một đầu vào một đầu ra SISO
(Single Input Single Output) hay hệ thống đơn ăng ten. Dung lượng kênh
của hệ thống MIMO là tổng hợp dung lượng của các kênh con thành phần.
Dung lượng kênh MIMO bị ảnh hưởng bởi sự thay đổi phân bố tăng ích
đặc trưng của các kênh con SISO. Giải pháp sử dụng nhiều phần tử ăng ten
tại cả máy thu và máy phát cho phép khôi phục dữ liệu phát tốt hơn, cải
thiện quá trình tách dữ liệu của người sử dụng. Hai mô hình MIMO cơ bản
đó là mã hóa không gian thời gian STC (Space Time Coding) và ghép kênh
phân chia không gian SM (Spatial Multiplexing). Mã hóa không gian thời
gian được dùng để làm tối đa phân tập không gian trong các kênh MIMO.
MIMO sử dụng nhiều ăng ten phát và nhiều ăng ten thu để mở thêm các
kênh truyền trong miền không gian. Do các kênh song song được mở ra
cùng thời gian, cùng tần số, nên đạt được tốc độ dữ liệu cao mà không cần
băng thông lớn. Nói một cách khác là nhờ sử dụng nhiều phần tử ăng ten ở
cả phía phát và phía thu, mà kỹ thuật này cho phép sử dụng hiệu quả phổ
2
tần số cho hệ thống thông tin vô tuyến, cải thiện tốc độ dữ liệu, dung lượng
kênh truyền cũng như độ tin cậy so với các hệ thống truyền thông đơn ăng
ten bằng cách xử lý theo cả hai miền không gian và thời gian.
Trong thời gian gần đây, các nghiên cứu trên thế giới ngày càng
quan tâm nhiều đến các hệ thống thông tin vô tuyến MIMO [7]-[17]. Trong
đó có nhiều hướng nghiên cứu giải quyết các vấn đề khác nhau như bài
toán dung lượng kênh MIMO, bài toán ước lượng kênh truyền, bài toán mã
hóa không gian thời gian, xử lý tín hiệu không gian thời gian,...
Trong hệ thống thông tin vô tuyến đa ăng ten này, ngoài các tham số
của tín hiệu trong miền thời gian, miền tần số như trong các hệ thống thông
tin vô tuyến truyền thống thì các tham số về không gian như hướng sóng
tới, hướng sóng đi,… là các tham số đóng vai trò rất quan trọng cần được
ước lượng. Bên cạnh đó, việc ước lượng đồng thời hai tham số của tín hiệu
tới sẽ mang lại nhiều lợi thế như hạn chế được số phần tử ăng ten sử dụng
trong dàn, sẽ tiết kiệm chi phí, giảm giá thành hệ thống. Do đó, nghiên cứu
các thuật toán ước lượng các tham số của tín hiệu trong miền không gian,
thời gian và tần số trong hệ thống thông tin vô tuyến đa ăng ten cũng như
ước lượng đồng thời hai hay nhiều tham số đang là bài toán luôn được đặt
ra và đóng vai trò quan trọng trong hệ thống. Nghiên cứu tập trung nhiều
vào xử lý tín hiệu không gian thời gian, tần số trong hệ thống dùng nhiều
ăng ten ở cả phía phát và phía thu, để nâng cao chất lượng, dung lượng của
hệ thống và giảm nhiễu trên cơ sở đa truy nhập phân chia theo không gian
SDMA (Space Division Multiplexing Access) [18]- [21].
Nghiên cứu các kỹ thuật xử lý tín hiệu tiên tiến, nghiên cứu tìm ra
các thuật toán với độ phân giải cao để ước lượng chính xác các tham số của
tín hiệu không tương quan và tín hiệu tương quan trong cả miền không
gian, thời gian và tần số đang là chủ đề nghiên cứu được các nhà khoa học
trong và ngoài nước quan tâm. Ở trong nước, tại một số trường đại học,
viện nghiên cứu đang thực hiện các nghiên cứu khoa học về xử lý tín hiệu,
3
việc ước lượng kênh truyền cũng như các tham số của tín hiệu trong hệ
thống thông tin vô tuyến, di động tiên tiến. Một số nghiên cứu gần đây tập
trung vào bài toán cấp phát kênh động cho hệ thống thông tin di động sử
dụng công nghệ MIMO- OFDMA [1], tuy nhiên tác giả chưa đề cập đến
bài toán ước lượng các tham số của tín hiệu trong hệ thống mà hầu như chỉ
tập trung vào vấn đề đa truy nhập, cấp phát kênh trong hệ thống. Còn trong
nghiên cứu [4] tác giả lại chỉ tập trung vào vấn đề mã hóa, san bằng kênh
trong hệ thống thông tin vô tuyến MIMO. Các nghiên cứu gần đây liên
quan trực tiếp đến bài toán ước lượng tham số không gian hướng sóng tới
phải kể đến là [2, 3, 5, 6]. Tuy nhiên, việc ước lượng các tham số của tín
hiệu trong hệ thống chủ yếu mới dừng lại ở một tham số hướng sóng tới
trong mặt phẳng phương vị của các tín hiệu không tương quan mà chưa xử
lý đối với tín hiệu tương quan và chưa đề cập đến mô hình máy thu cụ thể.
Trong các hệ thống thông tin di động tiên tiến ở đó tín hiệu cần ước lượng
bao gồm cả miền không gian, miền thời gian và miền tần số, việc ước
lượng một tham số của tín hiệu bị hạn chế bởi độ phân giải của hệ thống.
Do đó, nghiên cứu đề xuất phương pháp ước lượng đồng thời nhiều tham
số của tín hiệu không tương quan và tương quan cũng như phát triển các
kiến trúc máy thu mới hướng đến mô hình máy thu thông minh tự cấu hình
trong hệ thống thông tin vô tuyến thế hệ tiếp theo là rất cần thiết.
Ngoài ra, do sự phát triển nhanh chóng của công nghệ vô tuyến, vấn
đề khan hiếm phổ đang giành được sự chú ý. Hiện tại nhiều hệ thống thông
tin vô tuyến sử dụng việc cấp phát phổ cố định như hệ thống WiMAX,
WLAN, ISM hay trong hệ thống thông tin di động tế bào. Việc cấp phát
phổ cố định nảy sinh hai vấn đề: Một là sự khan hiếm tài nguyên phổ tần
số, thứ hai là người sử dụng phổ thường có tính chất thay đổi theo không
gian và thời gian, vì vậy cấp phát phổ cố định chưa đạt được hiệu suất sử
dụng phổ mong muốn. Vô tuyến nhận thức là một công nghệ vô tuyến có
khả năng cảm nhận về môi trường và tự động điều chỉnh các thông số cho
4
phù hợp với môi trường. Đó chính là giải pháp cho vấn đề khan hiếm phổ
hiện nay. Trong mạng vô tuyến nhận thức, hệ thống tận dụng nguồn tài
nguyên phổ bằng mô hình sử dụng phổ động thay vì kỹ thuật cấp phát phổ
cố định như trước đây. Để thực hiện được kỹ thuật này, vô tuyến nhận thức
phải xác định được tín hiệu người dùng sơ cấp có tồn tại hay không bằng
cách cảm nhận môi trường phổ. Kỹ thuật cảm nhận phổ có thể được chia
thành 4 hướng chính [22]- [24]: Xác định "lỗ trống phổ" dựa trên sự kết
hợp; xác định lỗ trống phổ dựa trên nhiễu; xác định ở phía phát và xác định
ở phía thu. Trong số các kỹ thuật xác định "lỗ trống phổ" ở phía phát,
người ta thường sử dụng mô hình có bộ tách sóng năng lượng (energy
detector) do chúng cấu trúc khá đơn giản và phù hợp với những đòi hỏi
chung về thời gian cảm nhận phổ không quá dài song cũng đạt được độ
chính xác nhất định. Bộ xác định dựa trên năng lượng của tín hiệu để đưa
ra quyết định về sự tồn tại của tín hiệu người dùng sơ cấp mà không đòi hỏi
thông tin trước đó về pha của tín hiệu hay phương thức điều chế.
Để có thể cải thiện hiệu quả hoạt động của hệ thống xác định lỗ trống
phổ dựa trên năng lượng, thường sử dụng hệ thống nhiều ăng ten (multiple
antennas) với các kỹ thuật tổng hợp tín hiệu khác nhau, như kỹ thuật kết
hợp tỷ số tối đa (MRC- Maximum Ratio Combining), kỹ thuật kết hợp tăng
ích đều (EGC- Equal Gain Combining),..., đem lại hiệu quả hoạt động khác
nhau cho toàn hệ thống. Hạn chế đối với hệ thống xác định dựa trên năng
lượng là nó vẫn đòi hỏi thông tin trạng thái kênh truyền (Channel State
Information) như phương sai của nhiễu,… Một vài nghiên cứu gần đây
[24] cũng đưa ra được những phương án giải quyết, tuy nhiên kết quả còn
chưa được như mong muốn.
Luận án này được tiến hành nhằm đề xuất các giải pháp, thuật toán
để ước lượng các tham số của tín hiệu trong hệ thống thông tin, định vị vô
tuyến một cách tách biệt và đồng thời hai hay nhiều tham số của tín hiệu
không tương quan và tương quan với độ phân giải và tính chính xác cao.
5
Luận án nghiên cứu về kỹ thuật cảm nhận phổ sử dụng nhiều ăng ten và bộ
tách sóng năng lượng trong hệ thống vô tuyến nhận thức, đi vào kỹ thuật
xử lý, tính toán mới để tổng hợp nên tín hiệu từ nhiều ăng ten. Hoạt động
của các hệ thống đề xuất được xây dựng trên cơ sở toán học và kết quả mô
phỏng so sánh giữa những mô hình đề xuất với mô hình truyền thống thực
hiện bằng MATLAB.
Mục tiêu nghiên cứu của luận án
Nghiên cứu tìm ra các giải pháp, thuật toán, mô hình mới ước lượng
các tham số của tín hiệu không tương quan và tương quan trong miền thời
gian, miền tần số, cảm nhận phổ và miền không gian trong hệ thống thông
tin vô tuyến, định vị vô tuyến tiên tiến. Luận án tập trung nghiên cứu bài
toán ước lượng một tham số riêng lẻ và ước lượng đồng thời nhiều tham số
dùng giải thuật có độ phân giải cao. Ngoài ra, luận án cũng nghiên cứu đề
xuất các kỹ thuật cảm nhận phổ trong hệ thống thông tin vô tuyến tiên tiến
sử dụng nhiều ăng ten.
Đối tượng nghiên cứu:
Đối tượng nghiên cứu chính của luận án là:
- Hệ thống thông tin, định vị vô tuyến sử dụng một và nhiều ăng ten.
- Ăng ten mảng và ứng dụng trong hệ thống thông tin, định vị vô
tuyến.
- Xử lý tín hiệu miền không gian, thời gian và tần số trong hệ thống
thông tin, định vị vô tuyến tiên tiến.
- Các kỹ thuật ước lượng một tham số, nhiều tham số của tín hiệu
không tương quan và tương quan.
- Hệ thống thông tin vô tuyến nhận thức và kỹ thuật cảm nhận phổ.
Phương pháp nghiên cứu:
Phương pháp nghiên cứu của luận án bao gồm việc nghiên cứu lý
thuyết, xây dựng mô hình, đề xuất, cải tiến các thuật toán kết hợp với mô
phỏng trên máy tính.
6
Cấu trúc của Luận án:
Luận án gồm 4 chương với nội dung tóm tắt như sau:
Chương 1: Tổng quan về ước lượng các tham số của tín hiệu trong
hệ thống thông tin vô tuyến. Chương này trình bày tổng quan về các tham
số của tín hiệu trong hệ thống thông tin vô tuyến gồm: các tham số về thời
gian (thời gian trễ, TOA- Time Of Arrival), tham số không gian (hướng
sóng tới DOA- Direction Of Arrival), tham số trong miền tần số (tần số
FDOA - Frequency Difference Of Arrival, tần số Doppler, dịch tần Doppler
CFO -Carrier Frequency Offset) và vấn đề ước lượng các tham số của tín
hiệu trong hệ thống thông tin vô tuyến. Tiếp theo, chương 1 trình bày kỹ
thuật ước lượng tham số hướng sóng tới DOA, những điều kiện và thông số
ảnh hưởng đến việc ước lượng DOA, thuật toán điển hình để ước lượng
DOA của tín hiệu không tương quan là MUSIC (Multiple Signal
Classification), kỹ thuật ước lượng DOA trong trường hợp các tín hiệu
tương quan. Phần tiếp theo của chương này sẽ đề cập đến kỹ thuật ước
lượng độ dịch tần số sóng mang CFO và FDOA, kỹ thuật cảm nhận phổ
dựa trên các tham số ước lượng và cuối cùng là phần đặt vấn đề nghiên cứu
của luận án.
Chương 2: Thuật toán ước lượng một tham số của tín hiệu trong hệ
thống thông tin vô tuyến. Trong chương này đề xuất một số ý tưởng mới
nhằm ước lượng một tham số của tín hiệu trong hệ thống thông tin vô tuyến
tiên tiến. Thứ nhất là đề xuất cải tiến một thuật toán, mô hình mới dựa trên
thuật toán phân loại tín hiệu đa đường MUSIC để ước lượng FDOA. Thứ
hai là đưa ra hai đề xuất cho việc ước lượng CFO trong các hệ thống thông
tin vô tuyến nhiều ăng ten MIMO: Giải pháp đầu tiên là cải tiến từ giải
pháp cho hệ thống SISO với điều kiện CFO của các nguồn tại một thời
điểm phải bằng nhau, có thể cho phép CFO của các nguồn thay đổi theo
thời gian và cho độ chính xác tương đối cao. Giải pháp tiếp theo là phát
triển thuật toán từ thuật toán MUSIC truyền thống, dựa trên FDOA. Thứ ba
7
là đề xuất kiến trúc máy thu hoàn toàn số cho bài toán tìm hướng sóng tới
DOA cho hệ thống thông tin, định vị vô tuyến nhiều anten.
Chương 3: Thuật toán ước lượng đồng thời nhiều tham số của tín
hiệu trong hệ thống thông tin vô tuyến: Đề xuất, cải tiến các phương pháp,
mô hình, thuật toán ước lượng đồng thời hai tham số của tín hiệu cho hệ
thống thông tin, định vị vô tuyến tiên tiến, trong đó tập trung vào tham số
không gian là hướng sóng tới trong cả mặt phẳng phương vị và góc ngẩng
tà hay góc tà, tham số thời gian tới của tín hiệu hay trễ truyền sóng, dịch
tần Doppler của tín hiệu. Các thuật toán độ phân giải cao dựa trên không
gian con, mô hình dữ liệu đề xuất không chỉ áp dụng cho các nguồn tín
hiệu không tương quan mà còn cho phép áp dụng được đối với các nguồn
tín hiệu tương quan. Đối với tín hiệu tương quan, luận án đã đề xuất, cải
tiến kỹ thuật làm mịn không gian dựa trên ma trận hiệp phương sai của dữ
liệu thu được để phá vỡ tính tương quan của tín hiệu trước khi áp dụng giải
thuật có độ phân giải cao.
Chương 4: Phương pháp cảm nhận phổ trong hệ thống thông tin vô
tuyến: Đề xuất một phương pháp cảm nhận phổ cho các hệ thống vô tuyến
nhận thức, sử dụng các mẫu tín hiệu thu được để ước lượng giá trị trung
bình và phương sai của nhiễu và tín hiệu cộng với nhiễu, sau đó thực hiện
việc cảm nhận phổ bằng các bộ tách sóng năng lượng mà không yêu cầu
thông tin về trạng thái kênh CSI (Channel State Information) tại máy thu
như các phương pháp thông thường khác. Đồng thời chương này cũng đề
xuất một hệ thống mới kết hợp kỹ thuật xử lý song song và luật OR áp
dụng cho đa ăng ten để thực hiện cảm nhận phổ.
Phần kết luận và hướng nghiên cứu tiếp theo của luận án: Trình bày
tóm tắt các kết quả đạt được của luận án và nêu ra hướng phát triển tiếp
theo của đề tài, cũng như những nghiên cứu dự kiến sẽ thực hiện trong
tương lai.
8
Những đóng góp của luận án:
1) Đề xuất thuật toán ước lượng tham số CFO và FDOA của tín hiệu
trong hệ thống thông tin vô tuyến.
2) Đề xuất, cải tiến thuật toán ước lượng đồng thời các tham số của tín
hiệu là DOA, tần số Doppler, trễ truyền sóng và DOA theo góc
phương vị, góc ngẩng trong hệ thống thông tin vô tuyến.
3) Đề xuất giải pháp cảm nhận phổ trong hệ thống thông tin vô tuyến
không sử dụng CSI mà dựa trên các tham số ước lượng, đồng thời đề
xuất giải pháp cảm nhận phổ sử dụng kỹ thuật xử lý song song và luật
OR.
4) Đề xuất kiến trúc máy thu mới sử dụng cho bài toán ước lượng DOA.
9
CHƯƠNG 1:
TỔNG QUAN VỀ ƯỚC LƯỢNG CÁC THAM SỐ
CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN
1.1. Tổng quan về ước lượng các tham số của tín hiệu trong hệ thống
thông tin vô tuyến
Các hệ thống vô tuyến đã trở nên phổ biến trong cuộc sống hàng
ngày, giúp cho con người có thể liên lạc với nhau bất kể vị trí của họ ở đâu.
Dựa trên sự thành công của các hệ thống tế bào, các hệ thống vô tuyến thế
hệ tiếp theo đòi hỏi phải có thông tin tốc độ cao, với chất lượng dịch vụ
(QoS) tốt hơn, hiệu quả sử dụng phổ tần số cao hơn. Trong các hệ thống
thông tin vô tuyến một ăng ten phát một ăng ten thu SISO truyền thống, có
hai cách tiếp cận phổ biến để đạt được tốc độ dữ liệu cao. Cách thứ nhất là
giảm chu kỳ ký hiệu dẫn tới tăng băng thông. Cách thứ hai là tận dụng các
phương thức điều chế nhiều mức với công suất phát lớn hơn. Tuy nhiên, do
giới hạn về phổ tần số, tăng băng thông là phương án không thực tế. Mặt
khác, tăng công suất phát làm cho giá thành bộ khuếch đại lớn và giảm thời
gian hoạt động của pin trong thiết bị đầu cuối.
Hiện nay, các hệ thống thông tin vô tuyến nhiều ăng ten phát nhiều
ăng ten thu (MIMO), với nhiều ăng ten ở cả phía phát và phía thu, đang thu
hút được sự quan tâm nghiên cứu do công nghệ này có khả năng đáp ứng
được cả hai yếu tố là dung lượng và hiệu suất sử dụng phổ. Điều này có
được là do trong hệ thống MIMO, các luồng dữ liệu độc lập cùng chia sẻ
các băng tần số và các khe thời gian, làm cho hiệu quả sử dụng phổ tăng
lên đáng kể. Theo lý thuyết thông tin, dung lượng của các hệ thống MIMO
có thể tăng tuyến tính với số lượng ăng ten phát cũng như số lượng ăng ten
thu (lớn hơn hoặc bằng số lượng ăng ten phát) [32]. So với hệ thống SISO
truyền thống, tốc độ dữ liệu của một hệ thống MIMO tăng tuyến tính với số
lượng ăng ten phát mà không cần mở rộng băng tần hay tăng công suất
10
phát. Vì thế, các hệ thống MIMO được kỳ vọng đóng vai trò chính trong
các hệ thống thông tin di động thế hệ thứ 4 cũng như các hệ thống thông tin
tiến tiến trong tương lai.
Trong hệ thống thông tin vô tuyến nhiều ăng ten, bài toán ước lượng
các tham số của tín hiệu thu vẫn đang là chủ đề được các cơ quan, các nhà
nghiên cứu trong và ngoài nước quan tâm [2, 5, 6, 25, 26, 27]. Trong hệ
thống này, ngoài các tham số của tín hiệu trong miền thời gian, miền tần số
như trong các hệ thống thông tin vô tuyến truyền thống thì các tham số về
không gian như hướng sóng tới, hướng sóng đi, …, cũng cần phải xác định
chính xác. Việc ước lượng các tham số về thời gian trễ và tần số cho phép
khôi phục kênh truyền, thực hiện việc đồng bộ cũng như bù lệch tần số tại
các thiết bị đầu cuối trong hệ thống. Việc ước lượng các tham số về không
gian như hướng sóng tới cho phép hệ thống thực hiện việc khôi phục kênh
truyền có chứa tham số không gian thực hiện chức năng đa truy nhập phân
chia theo không gian SDMA. Ngoài ra, khi biết tham số không gian hướng
sóng tới này, hệ thống tự động hiệu chỉnh đồ thị bức xạ của dàn ăng ten
theo hướng cần thiết để tăng tỷ số tín hiệu trên tạp âm hay tăng chất lượng
hệ thống thu. Bên cạnh đó, việc ước lượng được tham số không gian còn
giúp cho hệ thống định vị được các nguồn tín hiệu, giúp nhà thiết kế hệ
thống mô phỏng kênh không gian, thời gian. Hệ thống có thể ước lượng
các tham số không gian, thời gian, tần số một các độc lập. Hệ thống cũng
có thể ước lượng đồng thời hai hay nhiều tham số của tín hiệu. Việc ước
lượng đồng thời hai tham số của tín hiệu tới sẽ mang lại nhiều lợi thế như
hạn chế số phần tử ăng ten sử dụng trong dàn, do đó có thể tiết kiệm chi
phí và giảm giá thành hệ thống [27].
Phần tiếp theo của Luận án sẽ trình bày tóm tắt các kỹ thuật, thuật
toán ước lượng tham số không gian của tín hiệu là hướng sóng tới cũng
như các tham số về tần số, tần số Doppler làm tiền đề cho các đề xuất, cải
tiến sẽ được trình bày chi tiết ở các chương tiếp theo của luận án.
11
1.2. Kỹ thuật ước lượng hướng sóng tới (DOA )
1.2.1. Điều kiện và những thông số ảnh hưởng đến việc ước lượng DOA
Thuật toán ước lượng DOA hay AOA có độ phân giải cao được đề
xuất lần đầu bởi [28, 29]. Từ đó đến nay đã có thêm nhiều thuật toán mới
được đề xuất với nhiều ưu điểm mới. Trong bài toán ước lượng DOA
truyền thống, điều kiện để thực hiện là:
- Tín hiệu băng hẹp.
- Tín hiệu không tương quan.
- Tạp âm Gauss trắng tác động theo phương thức cộng.
Tuy nhiên, thực tế tín hiệu ăng ten nhận được là tín hiệu từ nhiều
nguồn khác nhau trong không gian cũng như các tín hiệu đa đường nên các
tín hiệu có khả năng tương quan với nhau. Mặt khác, trong thực tế nhiều tín
hiệu có băng thông rộng và mật độ phổ công suất của nhiễu không hoàn
toàn bằng phẳng trên toàn bộ dải tần, vì vậy nhiễu không chỉ là nhiễu trắng
mà đôi khi là nhiễu màu. Chính vì những lý do này làm cho những thuật
toán ước lượng DOA truyền thống còn có nhiều hạn chế và xảy ra sai số
khi sử dụng để ước lượng các tham số của tín hiệu. Để giải quyết vấn đề
này, người ta thường áp dụng những kỹ thuật khác để xử lý tín hiệu sao cho
thỏa mãn những điều kiện của thuật toán [30, 31]. Trong bài toán ước
lượng DOA của các nguồn tín hiệu, người ta có thể sử dụng các dàn ăng ten
thu với các phần tử sắp xếp đồng đều trên một vòng tròn hoặc trên một
đường thẳng. Trong bài toán ước lượng DOA này có nhiều tham số quan
trọng ảnh hưởng đến độ chính xác của thuật toán cần phải chú ý:
Thứ nhất là số phần tử trong ăng ten mảng phải lớn hơn số nguồn.
Trong thực tế, số phần tử ăng ten không thể quá lớn để hạn chế kích thước
cũng như giá thành hệ thống, trong khi số nguồn tín hiệu đôi khi khá nhiều.
Do đó, việc chọn lựa số phần tử trong dàn ăng ten có vai trò quyết định đến
độ chính xác của việc ước lượng.
12
Thứ hai là khoảng cách giữa các phần tử trong ăng ten mảng thông
thường là 0,5 lần bước sóng. Khi thiết kế hệ ăng ten cần chú ý đến điều
kiện này bởi khi tỷ số /d thay đổi dù nhỏ, kết quả cũng có sự thay đổi
khá lớn.
Thứ ba là số lượng mẫu: Tăng số lượng mẫu cũng làm tăng độ phân
giải. Tuy nhiên, thông số này ảnh hưởng không nhiều, thông thường đối
với hệ thống ăng ten 15 phần tử, số mẫu là vài trăm đủ để hệ thống cho kết
quả tốt.
Thứ tư là tỷ số tín hiệu trên tạp âm: Tỷ số tín hiệu trên tạp âm lớn thì
hình dạng của điểm dò được sẽ sắc nét hơn.
Thứ năm là ước lượng DOA 1 chiều (1-D) hay 2 chiều (2-D). Đối
với ăng ten đồng dạng tuyến tính xếp theo đường thẳng ULA ta dùng ước
lượng DOA 1 chiều, tức là chỉ ước lượng góc DOA trong mặt phẳng
phương vị. Còn đối với hệ thống 2 chiều thì hướng sóng tới có thể ước
lượng cả góc phương vị và góc ngẩng.
1.2.2. Công thức tổng quát của bài toán DOA
Chúng ta xét một mảng ăng ten tuyến tính đồng dạng (ULA) gồm M
phần tử có bức xạ đẳng hướng (dàn ăng ten gồm M phần tử) xếp cách đều
nhau với khoảng cách d (thường là 2/ hoặc nhỏ hơn 2/ ) nhận các tín
hiệu là các nguồn không tương quan với nhau. Tín hiệu nhận được chứa
nhiễu Gauss trắng cộng với phương sai là 2 . Giả sử tín hiệu là băng hẹp
với tần số trung tâm là 0 . Giả thiết thỏa mãn điều kiện trường khu xa, các
tín hiệu s(t) tới dàn ăng ten thu là các sóng phẳng tạo bởi trục chứa các
phần tử ăng ten một góc tới trong mặt phẳng phương vị là θ độ. Giả thiết ta
lấy phần tử ăng ten thứ nhất làm chuẩn tham chiếu.
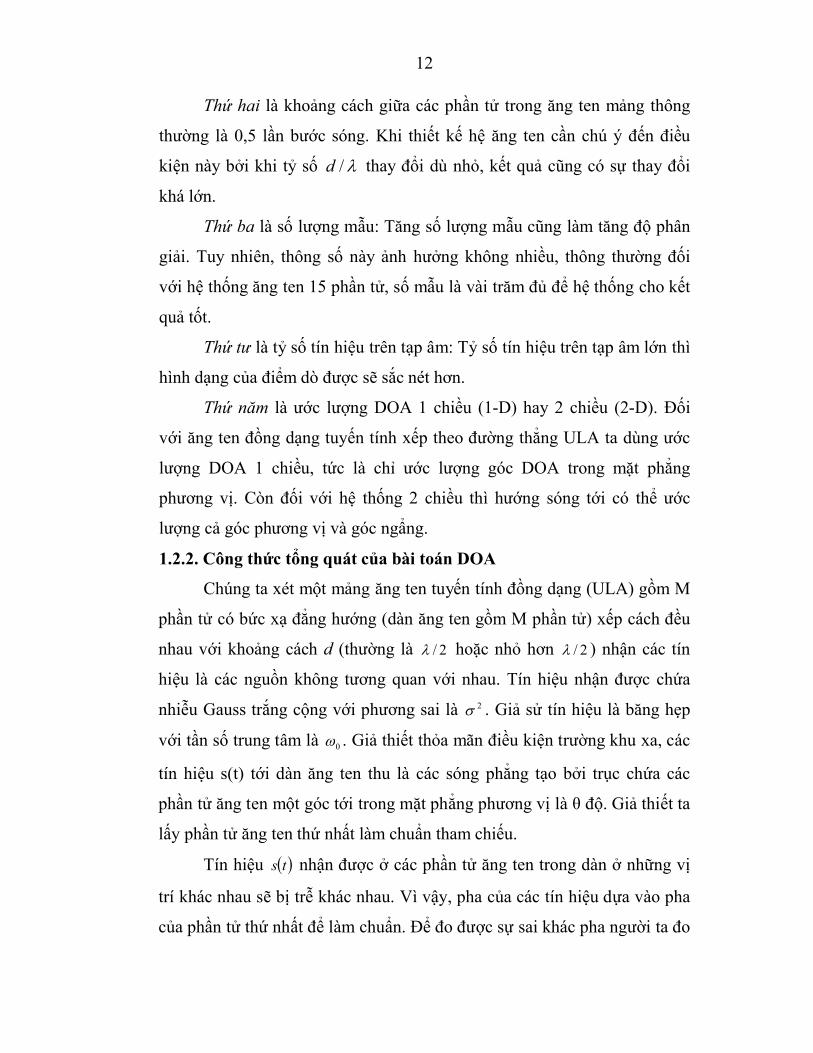
Tín hiệu ts nhận được ở các phần tử ăng ten trong dàn ở những vị
trí khác nhau sẽ bị trễ khác nhau. Vì vậy, pha của các tín hiệu dựa vào pha
của phần tử thứ nhất để làm chuẩn. Để đo được sự sai khác pha người ta đo
13
sự khác biệt về thời gian mà ts nhận được ở phần tử thứ nhất và phần tử
thứ k.
Hình 1.1: Mô hình sóng truyền lan nhận được bởi các phần tử ăng ten
tuyến tính đồng nhất bố trí trên một đường thẳng
Hình 1.2 là sơ đồ khối hệ thống thu thực hiện việc ước lượng hướng
sóng tới DOA:
Hình 1.2: Sơ đồ khối hệ thống thu ước lượng hướng sóng tới
Dùng cấu trúc hình 1.1 và dùng những phép tính lượng giác cơ bản
ta tính được trễ truyền lan giữa các phần tử ăng ten là:
c
kdtk
sin (1.1)
Bộ xử lý tínhiệu ở băng cơ sở
Hướng sóng tới
Máy thu 1
Máy thu M
x0(t) x1(t) x2(t) xM-1(t)
s(t)
Các phần tử mảng
xk(t) = s(t-tk)
dd

14
Giả sử ts là tín hiệu thông dải băng hẹp tại tần số sóng mang cf và
có đường bao phức ts1 , thì ts có thể được viết thành:
tfj cetsts 21 .Re (1.2)
Khi đó tín hiệu nhận được ở phần tử thứ k là:
kc ttfjkk ettstx 2
1 .Re (1.3)
Tín hiệu nhận được ở phần tử thu thứ nhất là:
kc tfjk ettstx 2
11 . (1.4)
Điều kiện để tín hiệu là băng hẹp:
Khi tín hiệu thu được lấy mẫu với chu kỳ lấy mẫu T thì tín hiệu có
thể được viết lại thành:
kc tfjkk etnTsnTx 2
1 . (1.5)
Để tín hiệu là băng hẹp trong điều kiện dàn ăng ten thì chu kỳ T phải
lớn hơn rất nhiều trễ truyền lan giữa hai phần tử trong mảng:
ktT (1.6)
Trong trường hợp ngược lại thì gọi là tín hiệu băng rộng trong điều
kiện dàn anten.
Do đó:
kc tfjk enTsnTx 2
1 . (1.7)
Ta lại có:
sin.21
21
kdjtfj enTsenTs kc (1.8)
Do đó:
sin21 . kdj
k enTsnTx (1.9)
Thời gian rời rạc sẽ được dùng với chỉ số thời gian n. Mẫu thứ n của
tín hiệu thu ở phần tử ăng ten thứ k là nxk :
k
kdjk ansensnx sin2
1 . (1.10)
Giả sử có R tín hiệu hiện tại thì mẫu thứ n của tín hiệu thứ i gọi là
si[n] với i = 0; 1; 2…; R-1.

15
Tín hiệu lấy mẫu ở phần tử thứ k là:
1
0
R
iikik ansnx (1.11)
1.2.3. Phương trình ma trận cho dàn ăng ten
Với dàn ăng ten gồm M phần tử (k = 0,1,2,…, M-1) thì phương trình
(1.11) được viết lại như sau:
nn
nn
nn
ns
ns
ns
aaa
aaa
aaa
nx
nx
nx
RRRMMM
R
R
M1
1
0
1
1
0
111101
111101
101000
1
1
0
(1.12)
Trong đó:
x[n] là vector M1, [n]kv là nhiễu được thêm vào ở mỗi phần tử.
A là ma trận kích thước MR chứa thông tin về góc pha của các tín
hiệu tới.
Cột của A xác định bởi a( i ) gọi là véctơ dõi theo hay véc tơ chỉ
phương (steering vector) của tín hiệu si(t).
Ta thấy a( i ) phụ thuộc góc tới của tín hiệu nên có thể tìm được góc
tới nếu biết a( i ) hoặc nếu biết hệ sinh của không gian con sinh bởi các véc
tơ đó khi góc của R tín hiệu là khác nhau.
1.2.4. Ma trận hiệp phương sai của tín hiệu thu từ dàn ăng ten
Ma trận hiệp phương sai của véc tơ tín hiệu thu tính được là:
(1.13)
Với: HnnSS ssER (1.14)
Và H là phép biến đổi liên hợp phức và chuyển vị (hay toán tử
Hermitien).
Các véc tơ riêng và trị riêng được tính được từ xxR . Vì xxR là ma trận
Hermitien và xác định dương, do đó các giá trị riêng của ma trận sẽ là các
MMH
SSHnn
HHnn
Hnnnn
Hnnxx IAARnnEAssAEnAsvAsExxER 2

16
giá trị thực và dương. R sóng tới được biểu thị bằng R giá trị riêng không
âm và được sắp xếp theo thứ tự có biên độ giảm dần như sau:
0 > 1 > 2 > …> r ….> 1R > 0 (1.15)
Vì tạp âm có năng lượng bằng 2 dẫn đến các giá trị riêng ở đầu ra
của các phần tử thu (gồm cả nhiễu) sẽ là:
0 0 + 2 , …., 1R 1R + 2
Với R 1R …… 1M = 2 (1.16)
Thì: 0 > 1 > … > 1R > R = …. = 1M
0 + 2 > 1 + 2 > … > 1R + 2 > R = …. = 1M (1.17)
M giá trị riêng tương ứng với M véc tơ riêng 0v , 1Rv , 1Mv
Sau khi tính thu được ma trận hiệp phương sai như sau:
1
. .R
H Hxx r r r
r
R Q D Q
(1.18)
Trong đó:
Q là ma trận có chứa các véc tơ riêng:
1110 ,...,,...,, MR vvvvQ (1.19)
Q chứa các véc tơ QS và QN.
QS: Là véc tơ hợp thành của R giá trị riêng lớn nhất, bao gồm các véc
tơ riêng liên kết với không gian con tín hiệu và cùng phương với các véc tơ
chỉ phương.
QN: Là véc tơ hợp thành của các véc tơ riêng tương ứng với giá trị
riêng M- R nhỏ nhất, bao gồm các véc tơ riêng của không gian con nhiễu và
trực giao với các véc tơ chỉ phương.
Kết quả của ma trận hiệp phương sai và các giá trị riêng ta đã chỉ ra
tín hiệu và nhiễu thu gồm hai không gian con:
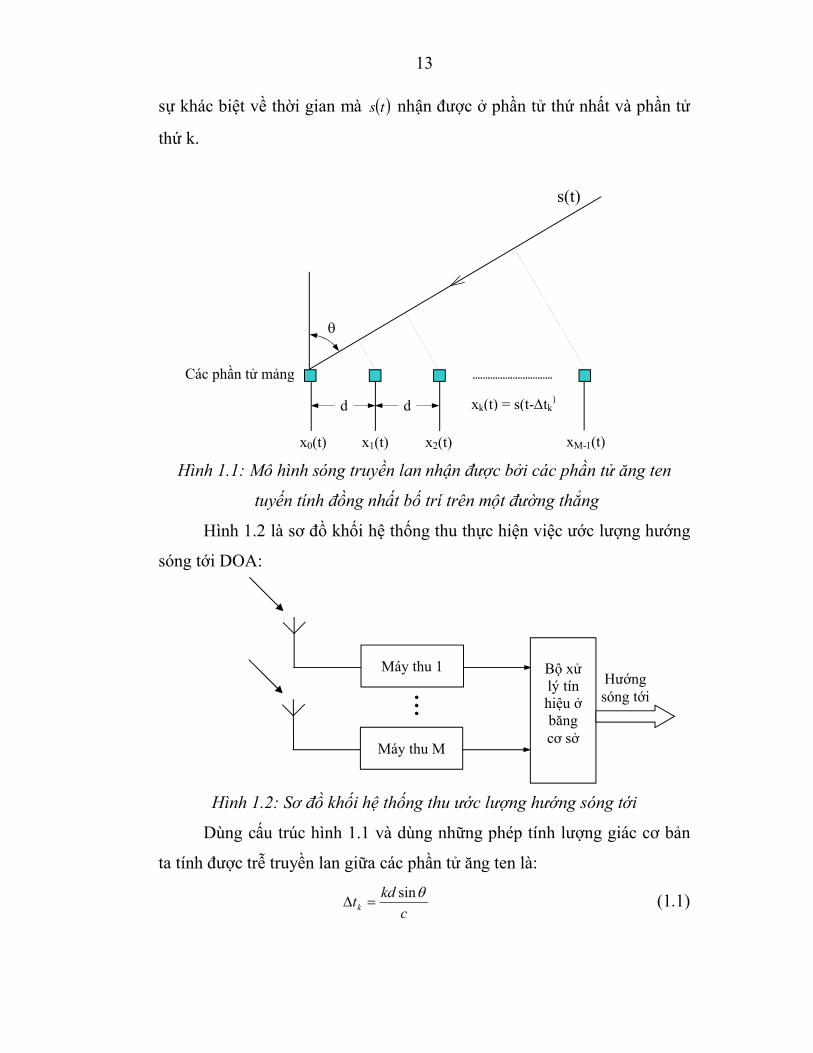
17
- Thứ nhất: là không gian con tín hiệu được sắp xếp theo thứ tự biên
độ giảm dần, có kích thước R tương ứng với R tín hiệu và R trị riêng.
- Thứ hai: là không gian con nhiễu có giá trị riêng bằng 2 với kích
thước M- R.
Rõ ràng, điều kiện M > R sẽ tồn tại không gian con nhiễu, đó là điều
kiện để xây dựng thuật toán không gian con tín hiệu.
Hình 1.3. Giản đồ sắp xếp các giá trị riêng tín hiệu
1.2.5. Thuật toán MUSIC ước lượng DOA
MUSIC là thuật toán sử dụng các phép toán ma trận để tìm ra DOA
bằng cách phân loại các nguồn tín hiệu đi tới từng phần tử ăng ten theo góc
độ không gian. Thuật toán này cho phép xác định số lượng nguồn phát,
cường độ của tín hiệu và công suất nhiễu. Dựa trên QS và QN người ta xây
dựng hàm độ lệch hay hàm phân loại [28].
aQQaF HNS
H (1.20)
Và hàm phổ giả MUSIC: PMUSIC = 1/F( ).
Việc ước lượng hướng sóng tới trở thành việc tìm giá trị lớn nhất của hàm
PMUSIC.
1.2.6. Ước lượng DOA của các tín hiệu tương quan
Khi áp dụng các thuật toán ước lượng DOA kể trên thường phải đi
kèm với giả thiết là các nguồn tín hiệu không tương quan với nhau. Tuy
......
Biên độ
2
1
Không gian con tín hiệu kích thước R Không gian con nhiễu có kích thước M-R
R 1R M
18
nhiên, trong thực tế thì các nguồn có thể tương quan với nhau, khi đó cần
phải phá vỡ tính tương quan giữa các tín hiệu trước khi áp dụng các thuật
toán ước lượng DOA. Thuật toán cơ bản để phá vỡ tính tương quan giữa
các tín hiệu là làm mịn không gian SS (Spatial Smoothing) hoặc làm mịn
không gian thuận ngược FB-SS (Forward Backward Spatial Smoothing).
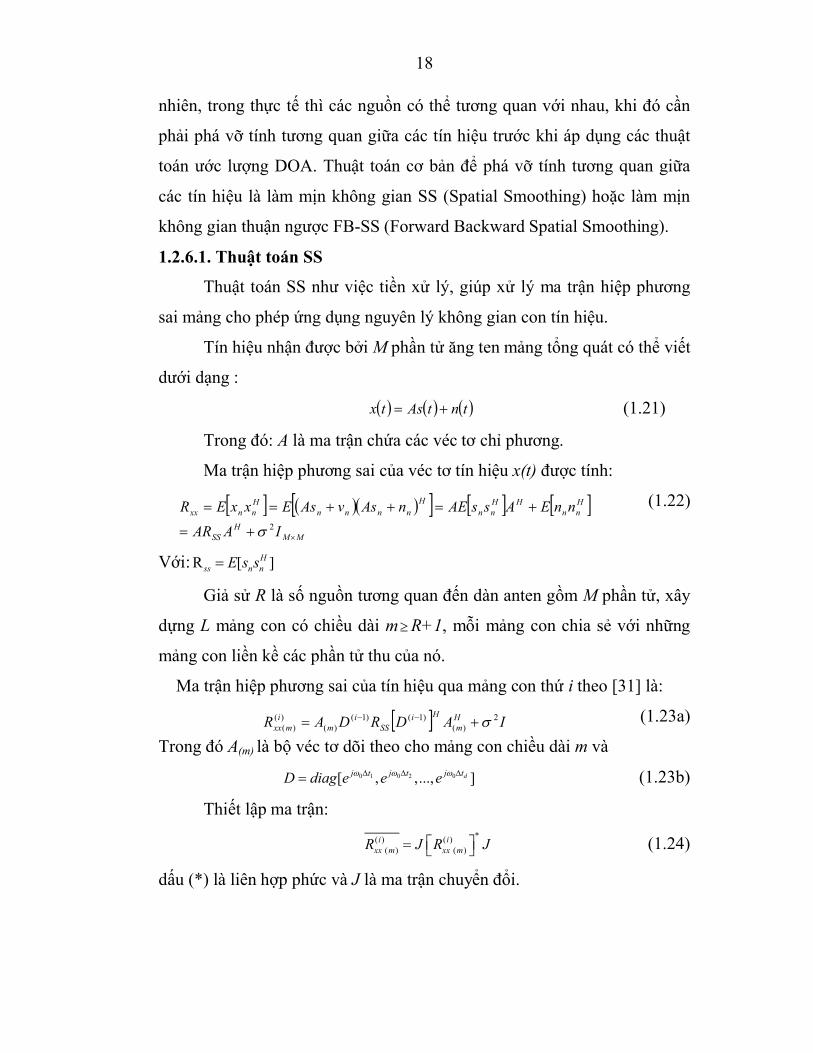
1.2.6.1. Thuật toán SS
Thuật toán SS như việc tiền xử lý, giúp xử lý ma trận hiệp phương
sai mảng cho phép ứng dụng nguyên lý không gian con tín hiệu.
Tín hiệu nhận được bởi M phần tử ăng ten mảng tổng quát có thể viết
dưới dạng :
tntAstx (1.21)
Trong đó: A là ma trận chứa các véc tơ chỉ phương.
Ma trận hiệp phương sai của véc tơ tín hiệu x(t) được tính:
(1.22)
Với: R [ ]Hss n nE s s
Giả sử R là số nguồn tương quan đến dàn anten gồm M phần tử, xây
dựng L mảng con có chiều dài m R+1, mỗi mảng con chia sẻ với những
mảng con liền kề các phần tử thu của nó.
Ma trận hiệp phương sai của tín hiệu qua mảng con thứ i theo [31] là:
(1.23a)
Trong đó A(m) là bộ véc tơ dõi theo cho mảng con chiều dài m và
0 1 0 2 0[ , ,..., ]dj t j t j tD diag e e e (1.23b)
Thiết lập ma trận:*( ) ( )
( ) ( )i i
xx m xx mR J R J (1.24)
dấu (*) là liên hợp phức và J là ma trận chuyển đổi.
MM
HSS
Hnn
HHnn
Hnnnn
Hnnxx
IAAR
nnEAssAEnAsvAsExxER
2
IADRDAR Hm
HiSS
im
imxx
2)(
)1()1()(
)()(

19
0 0 0 1
0 0 1 0
0 1 0 0
1 0 0 0
J
(1.25)
Công thức (1.24) có thể viết thành:* *( ) * ( 1) * ( 1) * 2
( ) ( ) ( ) Hi i i H
xx m m ss mR JA D R J D A J I (1.26)
Nhận thấy:
** ( 1)
( ) ( )m
m mJA A D
Do vậy, công thức (1.25) có thể viết thành:*( ) * ( 2) ( 2) * 2
( ) ( ) ( )
Hi i m i m Hxx m m ss mR A D R D A I (1.27)
Theo [30] chúng ta có thể xác định trung bình không gian và ma trận
hiệp phương sai đã được làm mịn:
L
i
imxx
imxx RR
LR
12
1~ (1.28)
Ma trận D thoả mãn điều kiện: 1 DD , do vậy ma trận R~ có thể viết
thành:
R~ = Am
( 1) ( 1) (2 ) * (2 ) 2( )
1
1
2
n H Hi i i m i m HSS SS m
i
D R D D R D A IL
( 1.29)
Nếu định nghĩa ma trận hiệp phương sai đã được làm mịn:
S~ = ( 1) ( 1) (2 ) * (2 )
1
1
2
L H Hi i i m i mSS SS
i
D R D D R DL
(1.30)
Khi đó ma trận R~ có thể viết:
IASAR Hmm
2~~ (1.31)
Hoàn toàn chứng minh được S~ là khả nghịch và có thể dùng những
thuật toán không gian con tín hiệu như MUSIC để ước lượng DOA.

20
1.2.6.2. Thuật toán FB- SS
Xét mảng gồm M cảm biến, R tín hiệu băng hẹp tương quan. Tín
hiệu nhận được ở phần tử thu thứ i là:
1
( ) ( ) exp( ( 1) os ) ( )R
i k k ik
x t s t j i c n t
(1.32)
Có thể viết
1 2( ) ( ), ( ), , ( ) ( ) ( )T
Mx t x t x t x t As t n t (1.33)
Với 1 2( ), ( ), , ( )RA a a a (1.34)
Trong đó ( )ka là véc tơ định hướng ứng với góc tới k .
(1.35)Ma trận hiệp phương sai đầu ra của mảng là:
IAARIASASR HSS
Hxx
22~ (1.36)
Đối với tín hiệu tương quan RSS là không khả nghịch và không thể áp
dụng các nguyên lý không gian con tín hiệu để ước lượng DOA. Kỹ thuật
FB-SS chia dàn ăng ten đồng dạng tuyến tính M cảm biến thành các mảng
con che phủ đều lên nhau có kích thước N.
Gọi L là số mảng con hướng thuận. L=M-N+1. Gọi ( )flx t là đầu ra
của mảng con thứ ( ),...,1 L .
1 1( ) ( ), ( ), , ( )Tf
l l l l Mx t x t x t x t ( 1) ( ) ( )llAD s t n t (1.37)
Với D = 1 ,..., Kj jdiag e e . Ta có:
(1.38)
Ma trận hiệp phương sai của mảng con thứ là:
( 1) ( 1) 2H Hf f f HSSR E x t x t AD R D A I
(1.39)
Với Rf là ma trận hiệp phương sai thuận, Rb là ma trận hiệp phương
sai ngược.
Ma trận hiệp phương sai thuận là:
( ) 1, exp( ), ,exp( ( 1) )T
k k ka j j M
0Hi kD a
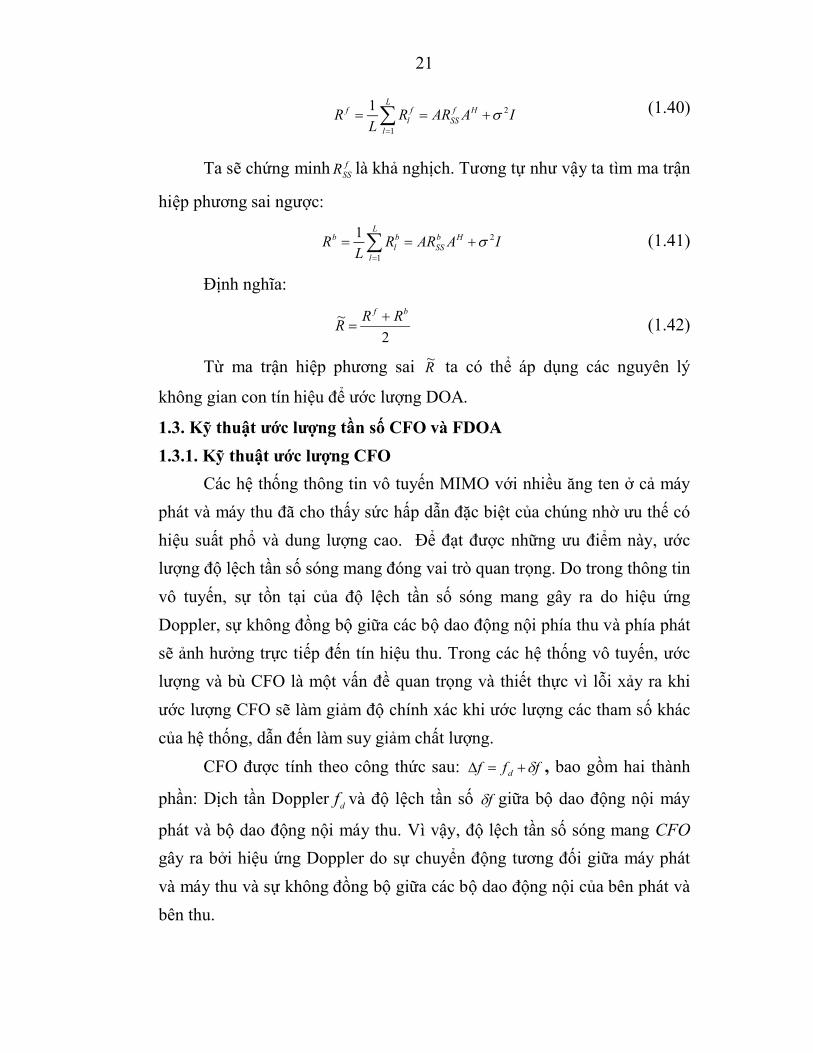
21
(1.40)
Ta sẽ chứng minh fSSR là khả nghịch. Tương tự như vậy ta tìm ma trận
hiệp phương sai ngược:
2
1
1 Lb b b H
l SSl
R R AR A IL
(1.41)
Định nghĩa:
2
~ bf RRR
(1.42)
Từ ma trận hiệp phương sai R~ ta có thể áp dụng các nguyên lý
không gian con tín hiệu để ước lượng DOA.
1.3. Kỹ thuật ước lượng tần số CFO và FDOA
1.3.1. Kỹ thuật ước lượng CFO
Các hệ thống thông tin vô tuyến MIMO với nhiều ăng ten ở cả máy
phát và máy thu đã cho thấy sức hấp dẫn đặc biệt của chúng nhờ ưu thế có
hiệu suất phổ và dung lượng cao. Để đạt được những ưu điểm này, ước
lượng độ lệch tần số sóng mang đóng vai trò quan trọng. Do trong thông tin
vô tuyến, sự tồn tại của độ lệch tần số sóng mang gây ra do hiệu ứng
Doppler, sự không đồng bộ giữa các bộ dao động nội phía thu và phía phát
sẽ ảnh hưởng trực tiếp đến tín hiệu thu. Trong các hệ thống vô tuyến, ước
lượng và bù CFO là một vấn đề quan trọng và thiết thực vì lỗi xảy ra khi
ước lượng CFO sẽ làm giảm độ chính xác khi ước lượng các tham số khác
của hệ thống, dẫn đến làm suy giảm chất lượng.
CFO được tính theo công thức sau: fff d , bao gồm hai thành
phần: Dịch tần Doppler df và độ lệch tần số f giữa bộ dao động nội máy
phát và bộ dao động nội máy thu. Vì vậy, độ lệch tần số sóng mang CFO
gây ra bởi hiệu ứng Doppler do sự chuyển động tương đối giữa máy phát
và máy thu và sự không đồng bộ giữa các bộ dao động nội của bên phát và
bên thu.
2
1
1 Lf f f H
l SSl
R R AR A IL
22
CFO làm tăng tỷ số lỗi bit BER, do sự tác động của CFO, điểm
chòm sao tín hiệu tương ứng với ký hiệu phát bị quay một góc )(t trong
mặt phẳng tín hiệu, dẫn đến điểm chòm sao tín hiệu tương ứng với ký hiệu
thu sau giải điều chế bị quay ra khỏi miền quyết định, làm xuất hiện sai số
phát hiện ký hiệu, tức là xảy ra lỗi bit, làm tăng xác suất lỗi bit Pe, tăng
BER và làm suy giảm chất lượng hoạt động của hệ thống, đặc biệt trong hệ
thống thống tin vô tuyến MIMO. Do đó, việc ước lượng và bù CFO là vấn
đề cần thiết.
Do cấu trúc đa ăng ten trong hệ thống MIMO, tồn tại nhiều CFO
giữa các ăng ten thu và phát. Vì thế, các thuật toán ước lượng CFO sử dụng
trong các hệ thống SISO không thể áp dụng trực tiếp vào hệ thống MIMO.
Có nhiều nghiên cứu về đồng bộ sóng mang trong hệ thống MIMO. Một
cách tiếp cận phổ biến là dựa trên việc lựa chọn chuỗi ước lượng một cách
có hiệu quả. Một phương pháp sử dụng đặc tính trực giao của các chuỗi
huấn luyện được đề xuất ở [12], [13]. Bên cạnh đó, các phương pháp dựa
trên các không gian con cũng thu hút được nhiều sự quan tâm [33].
Chương 2 của luận án sẽ đề xuất hai giải pháp ước lượng CFO trong
hệ thống thông tin vô tuyến MIMO. Giải pháp thứ nhất dựa vào sự dịch pha
giữa các tín hiệu huấn luyện để thu được CFO. Giải pháp thứ hai sử dụng
thuật toán MUSIC để ước lượng CFO.
1.3.2. Kỹ thuật ước lượng FDOA
Vô tuyến nhận thức là một công nghệ mới sử dụng phổ tần số hiệu
quả. Cảm nhận phổ là một trong những vấn đề thách thức nhất trong các hệ
thống vô tuyến nhận thức. Có một số phương pháp cảm nhận phổ dùng để
xác định phần phổ tần chưa được sử dụng để tận dụng cho việc truyền tín
hiệu. Phần này sẽ thảo luận về một phương pháp dựa trên thuật toán
MUSIC dùng để ước lượng phổ trong hệ thống vô tuyến nhận thức. Không
giống như thuật toán MUSIC truyền thống dùng để ước lượng hướng sóng
tới của tín hiệu, thuật toán này dựa trên FDOA ước lượng tần số hoặc sóng
mang của người dùng trong mạng vô tuyến nhận thức. Thuật toán được
23
phát triển mang lại khả năng ước lượng tần số có độ phân giải cao hơn so
với MUSIC truyền thống cũng như các phương pháp tiếp cận dựa trên FFT.
Vô tuyến nhận thức được đề xuất bởi Mitola III là một khái niệm
mới trong công nghệ truyền thông vô tuyến với lợi thế về hiệu suất sử dụng
phổ tần số [34]. Cảm nhận phổ trong hệ thống vô tuyến nhận thức phải xác
định được sự tồn tại của tín hiệu người dùng sơ cấp, loại tín hiệu và phần
phổ tần chưa sử dụng để tận dụng. Dựa vào những điều đã biết về phổ, hệ
thống vô tuyến nhận thức sẽ đưa ra quyết định về việc phát và thu tín hiệu
mà không gây ra can nhiễu đến người dùng sơ cấp.
Một số phương pháp cảm nhận phổ được đề xuất đối với các hệ
thống vô tuyến nhận thức, như OFDM, sử dụng băng lọc [37], dựa trên
phương pháp phân nhiều băng (MTM) [38] và ước lượng phổ theo chu kỳ
[39]. Tuy nhiên, tất cả các phương pháp này đều sử dụng FFT của tín hiệu
thu được- một phương pháp cổ điển chưa phải là giải pháp tốt nhất để thu
được phổ sắc nét. Về độ phân giải, sử dụng các kỹ thuật có độ phân giải
cao thay cho các kỹ thuật dựa trên FFT sẽ cho phổ chính xác và liền mạch
hơn [37]. Tuy nhiên, việc minh họa đơn giản cho phổ giả của một nút vô
tuyến nhận thức cũng có giới hạn. Ngoài ra, vấn đề độ phân giải, một tiêu
chuẩn quan trọng để đánh giá một phương pháp ước lượng phổ, vẫn chưa
được làm rõ. Thuật toán MUSIC, một thuật toán có độ phân giải cao được
giới thiệu lần đầu tiên bởi Ralph O. Schmidt dùng cho ước lượng hướng
sóng tới [28]. Trong các phần sau, nghiên cứu sinh nghiên cứu phát triển,
thay đổi thuật toán MUSIC này với mục đích ước lượng phổ trong các hệ
thống vô tuyến nhận thức.
Thuật toán MUSIC là một kỹ thuật ước lượng hướng sóng tới dựa
trên phân tích các giá trị riêng, còn được gọi là phương pháp dựa trên
không gian con. Trong các thuật toán có độ phân giải cao, MUSIC nổi lên
như một giải pháp đầy hứa hẹn, do kỹ thuật này có thể ước lượng nhiều
thông số cùng một lúc, như góc phương vị, góc ngẩng, phân cực, cũng như
trễ truyền sóng. Là một kỹ thuật dựa vào không gian con, MUSIC có các
ưu điểm như phân bổ tần số độc lập, hội tụ nhanh, không cần thông tin
24
DOA ban đầu. Đặc biệt, MUSIC có thể tối thiểu RMS hơn các thuật toán
không gian con đa chiều khác [29].
Các hệ thống vô tuyến nhận thức tập trung vào vấn đề ước lượng
được công suất tín hiệu tại các tần số khác nhau mà chủ yếu là sử dụng
MUSIC dựa trên FDOA. MUSIC dựa trên FDOA không chỉ loại bỏ được
ảnh hưởng của ăng ten và nhiễu mà còn giúp các hệ thống vô tuyến nhận
thức sử dụng phổ tần số hiệu quả hơn. Đặc biệt, có thể áp dụng thuật toán
MUSIC cải tiến lên một ăng ten thu để nó có thể hoạt động như một dàn
ăng ten thông thường, làm tăng đáng kể hiệu suất của hệ thống ăng ten và
đáp ứng được các yêu cầu của hệ thống vô tuyến nhận thức. Hơn nữa, như
chúng ta đã biết, MUSIC thường được dùng để ước lượng các tín hiệu băng
hẹp, trong khi FDOA được áp dụng cho việc định vị các nguồn tín hiệu
băng rộng. Do đó, sự kết hợp FDOA và MUSIC có thể được mở rộng phạm
vi ứng dụng của MUSIC. Trong các phần tiếp theo sẽ nghiên cứu cải tiến
thuật toán MUSIC truyền thống và Root- MUSIC để ứng dụng tốt hơn. Có
thể gọi thuật toán MUSIC cải tiến này là thuật toán có độ phân giải cao.
Thuật toán này vẫn hoạt động theo nguyên lý của MUSIC, nhưng có một số
thay đổi trong mô hình hệ thống cũng như ma trận tính toán.
1.4. Kỹ thuật cảm nhận phổ dựa trên các tham số ước lượng
1.4.1. Kỹ thuật phân tập ở phía thu
Trong truyền thông vô tuyến, có hai vấn đề cơ bản thường được quan
tâm giải quyết đó là hiện tượng pha đinh và hiện tượng giao thoa. Các thiết
kế của hệ thống thông tin vô tuyến thường chú trọng giải quyết hai vấn đề
cơ bản này.
Một trong những kỹ thuật hiệu quả để làm giảm ảnh hưởng của pha
đinh là sử dụng các kỹ thuật phân tập. Ý tưởng của nó là trên các đường
truyền tín hiệu được giả thiết là độc lập với nhau, xác suất để tất cả đều
phải chịu pha đinh sâu là rất thấp. Chính vì vậy, ta sẽ gửi dữ liệu giống
nhau từ phía phát nhưng qua những đường đi hoàn toàn độc lập nhau. Tín
hiệu thu được ở các đường truyền độc lập đó sẽ được kết hợp với nhau theo
những cách khác nhau, mục đích là nhằm giảm pha đinh ở tín hiệu tổng
25
hợp ở mức cao nhất có thể. Với các cách kết hợp tín hiệu khác nhau, ta thu
được các kỹ thuật phân tập khác nhau.
Với kỹ thuật kết hợp lựa chọn (SC- Selection Combining) trong các
nhánh đường truyền, chỉ nhánh tín hiệu có SNR cao nhất được chọn lựa để
xử lý tiếp.
Trong kỹ thuật kết hợp tỷ số tối đa (MRC- Maximum Ratio
Combining) tín hiệu tại tất cả các ăng ten đều được kết hợp lại và đồng pha
tín hiệu theo mỗi nhánh.
Kỹ thuật kết hợp tăng ích đều (EGC- Equal Gain Combining) thực
hiện đồng pha tín hiệu trên mỗi nhánh và kết hợp tín hiệu với cùng một
trọng số.
Phần tiếp theo của Luận án sẽ đề xuất một phương pháp kết hợp tín
hiệu mới, không đòi hỏi thông tin trạng thái kênh (CSI- Channel State
Information), đồng thời thu được hiệu quả trong xử lý tín hiệu.
Khi một tín hiệu nhận được trải qua hiện tượng pha đinh trong quá
trình truyền, cả đường bao và pha của nó sẽ dao động biến đổi theo thời
gian. Đối với cách điều chế tương quan, hiện tượng pha đinh ảnh hưởng lên
pha có thể làm suy giảm nghiêm trọng hoạt động của hệ thống trừ khi thực
hiện bù sự suy giảm ở đầu thu. Thông thường, khi phân tích hệ thống,
thường giả thiết rằng những ảnh hưởng của pha do pha đinh đều được điều
chỉnh lại một cách chính xác tại đầu thu, ta gọi là giải điều chế tương quan
lý tưởng. Đối với mô hình giải điều chế không tương quan, tại đầu thu
không đòi hỏi thông tin về pha, do đó sự biến đổi về pha do hiện tượng pha
đinh không ảnh hưởng đến hoạt động của toàn hệ thống. Vì vậy, phân tích
hoạt động của hệ thống cho cả điều chế không tương quan và tương quan lý
tưởng trên kênh truyền có pha đinh chỉ đòi hỏi thông tin về đường bao
thống kê. Chương 4 của luận án sẽ đề xuất một kỹ thuật cảm nhận phổ
không yêu cầu thông tin CSI cũng như các thông tin chính xác về tín hiệu
và nhiễu.
26
1.4.2. Kỹ thuật cảm nhận phổ kết hợp
1.4.2.1. Giới thiệu
Trong các hệ thống thông tin vô tuyến, việc cấp phát phổ tần số theo
phương pháp truyền thống trở nên không phù hợp do sự phát triển nhanh
chóng của công nghệ. Công nghệ vô tuyến nhận thức CR [34- 35] là một
công nghệ vô tuyến tiên tiến, với tính năng nổi bật là cảm nhận phổ nhằm
tăng hiệu suất sử dụng phổ tần số vô tuyến. Dựa trên kỹ thuật cảm nhận
phổ, người dùng thứ cấp sẽ cố gắng tìm ra những khoảng phổ còn trống để
sử dụng. Vấn đề chính của cảm nhận phổ là xác định chính xác sự có mặt
của người dùng sơ cấp.
Trong những nghiên cứu gần đây, các tín hiệu thu được tại hệ thống
đa ăng ten được kết hợp với nhau và được xử lý bởi một hệ thống máy thu
đơn. Luật OR đã được đề xuất trong cảm nhận phổ kết hợp và kỹ thuật xử
lý song song được dùng để xác định sự có mặt của tín hiệu sơ cấp. Ngoài
ra, phần này cũng đề xuất một mô hình cảm nhận phổ mới chỉ sử dụng hai
ăng ten dựa trên kỹ thuật xử lý song song và luật OR.
Trong phần này, chất lượng của hai kỹ thuật được so sánh về mặt kết
hợp phân tập MRC và SC. Yêu cầu về thông tin CSI là hạn chế của các kỹ
thuật như MRC hay kỹ thuật EGC. Chất lượng của hệ thống đề xuất trong
[46] không cao như hệ thống sử dụng kỹ thuật EGC. Nghiên cứu trong [47]
đã đánh giá chất lượng của hệ thống sử dụng các tham số ước lượng để tính
toán giá trị ngưỡng.
Trong phương pháp truyền thống tận dụng đa ăng ten, những tín hiệu
nhận được tại mỗi ăng ten được kết hợp với nhau bởi các kỹ thuật khác
nhau. Trong [48], ý tưởng về kỹ thuật cảm nhận song song dùng với đa ăng
ten được đề xuất.
1.4.2.2. Kỹ thuật cảm nhận phổ kết hợp
Trong cảm nhận phổ kết hợp, nhiều phần tử vô tuyến nhận thức có
thể được phối hợp để thực hiện việc cảm nhận phổ và sau đó trao đổi thông
tin với nhau. Dựa trên ý tưởng này phần tiếp theo của luận án sẽ đề xuất ý
tưởng sử dụng kỹ thuật cảm nhận song song trong đó mỗi ăng ten được coi
27
như một phần tử vô tuyến nhận thức. Luật OR được sử dụng để xác định sự
có mặt của tín hiệu sơ cấp. Luật OR đã được sử dụng trong cảm nhận phổ
kết hợp, sau đó lại được áp dụng vào đa ăng ten trong vô tuyến nhận thức
để nâng cao hiệu suất của hệ thống. Với ý tưởng xử lý song song và luật
OR, luận án đề xuất một mô hình cảm nhận phổ mới, chỉ sử dụng hai ăng
ten và một bộ tạo biến ngẫu nhiên.
Trong mục 4.2. của chương 4 sẽ trình bày phương pháp kết hợp kỹ
thuật xử lý song song và luật OR áp dụng cho đa ăng ten để thực hiện cảm
nhận phổ. Đề xuất một hệ thống mới sử dụng kỹ thuật xử lý song song và
một bộ tạo biến ngẫu nhiên.
1.5. Đặt vấn đề nghiên cứu:
Trong hệ thống thông tin vô tuyến nhiều ăng ten, ước lượng các
tham số của tín hiệu thu trong miền thời gian, miền tần số như trong các hệ
thống thông tin vô tuyến rất cần được quan tâm nghiên cứu.
Vấn đề đặt ra là nghiên cứu đề xuất, cải tiến các giải pháp để ước
ước lượng các tham số của tín hiệu với độ phân giải và tính chính xác cao
nhằm nâng cao chất lượng và dung lượng của hệ thống, đồng thời đề xuất
kiến trúc máy thu để nâng cao khả năng ước lượng chính xác tham số DOA
của tín hiệu. Với mục tiêu như vậy, luận án tập trung nghiên cứu vào các
nội dung chính như sau:
- Nghiên cứu đề xuất thuật toán ước lượng tham số CFO và FDOA của
tín hiệu băng hẹp trong ngữ cảnh dàn anten trong hệ thống thông tin vô
tuyến.
- Nghiên cứu đề xuất, cải tiến thuật toán ước lượng đồng thời các tham
số của tín hiệu là DOA, tần số Doppler, trễ truyền sóng và DOA theo
góc phương vị, góc ngẩng trong hệ thống thông tin vô tuyến.
- Nghiên cứu đề xuất giải pháp cảm nhận phổ trong hệ thống thông tin
vô tuyến không sử dụng thông tin CSI mà dựa trên các tham số ước
lượng, đồng thời đề xuất giải pháp cảm nhận phổ sử dụng kỹ thuật xử
lý song song và luật OR.
- Đề xuất kiến trúc máy thu sử dụng hiệu quả cho bài toán ước lượng
DOA.
28
Kết luận chương 1
Chương 1 đã trình bày tổng quan về ước lượng các tham số của tín
hiệu trong hệ thống thông tin vô tuyến như các tham số về thời gian (thời
gian trễ, TOA), tham số không gian (DOA), tham số tần số (tần số Doppler,
FDOA, CFO). Chương 1 cũng trình bày kỹ thuật ước lượng DOA, những
điều kiện và thông số ảnh hưởng đến việc ước lượng DOA, thuật toán điển
hình để ước lượng DOA là MUSIC, kỹ thuật ước lượng DOA trong trường
hợp các tín hiệu tương quan. Kỹ thuật ước lượng tần số CFO và FDOA, kỹ
thuật cảm nhận phổ dựa trên các tham số ước lượng và sau đó là phần đặt
vấn đề nghiên cứu cho các chương tiếp theo của luận án.
29
CHƯƠNG 2:
THUẬT TOÁN ƯỚC LƯỢNG MỘT THAM SỐ
CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN
2.1. Đề xuất thuật toán ước lượng FDOA với độ phân giải cao cho hệ
thống thông tin vô tuyến tiên tiến
2.1.1. Tổng quan chung về thuật toán
MUSIC - Phân loại tín hiệu đa đường là một kỹ thuật ước lượng
hướng sóng tới DOA dựa vào không gian con. Thuật toán này còn được gọi
là phương pháp không gian con. Trong các thuật toán ước lượng có độ
phân giải cao, thuật toán MUSIC có nhiều ưu thế nổi bật, có thể ước lượng
nhiều tham số của tín hiệu như góc ngẩng, phân cực, dải hoạt động và góc
phương vị của sóng tới. Là một kỹ thuật dựa trên phương pháp không gian
con, MUSIC có nhiều ưu điểm như phân bố độc lập các tần số và không
yêu cầu thông tin DOA ban đầu. MUSIC biểu diễn đơn giản, có lỗi căn
quân phương (Root Mean Square Error- RMSE) ước lượng DOA nhỏ hơn
các thuật toán không gian con nhiều tham số khác. Đặc biệt, MUSIC sử
dụng tự tương quan để phân biệt không gian tín hiệu và không gian nhiễu.
Mặc dù MUSIC có nhiều ưu điểm, nhưng nó cũng có một nhược
điểm đó là hoạt động phụ thuộc vào góc tới của các ăng ten thu. Như vậy,
khi góc ăng ten thay đổi so với vị trí ban đầu, kết quả ước lượng sẽ bị giảm
đi rõ rệt, mà thực tế là góc của ăng ten là một biến thay đổi theo thời gian.
Vấn đề đặt ra là phải loại bỏ ảnh hưởng của góc ăng ten lên hoạt động của
thuật toán, hay nói cách khác là biến nó không chỉ là phương pháp DOA
nữa. Khi nghiên cứu về thông tin vô tuyến, vấn đề tần số được quan tâm
chủ yếu và mục đích chính của việc dò phổ là dò tần số mà những người
dùng sơ cấp đang sử dụng. Chính vì những lý do nêu trên mà ý tưởng về sử
dụng thuật toán MUSIC để ước lượng FDOA ra đời. Do đó MUSIC FDOA
không chỉ loại bỏ được ảnh hưởng của vị trí ăng ten cũng như nhiễu, mà
còn tăng hiệu suất sử dụng phổ dựa trên việc phát hiện ra phổ còn trống.
30
Nếu áp dụng MUSIC cho một ăng ten thu và xử lý tín hiệu trong
miền tần số, ăng ten này với nhiều điểm tần số sẽ đóng vai trò như một dàn
ăng ten trong không gian và nếu áp dụng cho một dàn ăng ten thì ta đã thực
hiện cấp số nhân số lượng ăng ten thực tế. Như vậy, hiệu suất sử dụng phổ
tăng cao, thoả mãn được yêu cầu đặt ra cho các hệ thống vô tuyến tiên tiến.
Một điều đáng chú ý nữa là trong khi MUSIC chỉ ước lượng được các tham
số của tín hiệu băng hẹp, thì FDOA có thể ước lượng được các tham số của
tín hiệu băng rộng. Với khả năng này, có thể ước lượng các tham số của tín
hiệu cho nhiều loại nguồn, do đó phạm vi ứng dụng sẽ rộng hơn. Phần này
sẽ phát triển thuật toán dựa trên giải thuật MUSIC truyền thống và MUSIC
gốc (Root- MUSIC) để chọn ra thuật toán thích hợp cho bài toán ước lượng
tần số. Thuật toán được đề xuất có độ phân giải cao, hoạt động theo các
nguyên lý cơ bản của MUSIC nhưng có một số thay đổi trong mô hình hệ
thống, cũng như mô hình toán học. Trong khi thuật toán MUSIC thường chỉ
áp dụng được cho các hệ thống MIMO, thì thuật toán này có thể áp dụng
cho cả hệ thống SISO và MISO.
2.1.2. Mô hình toán học
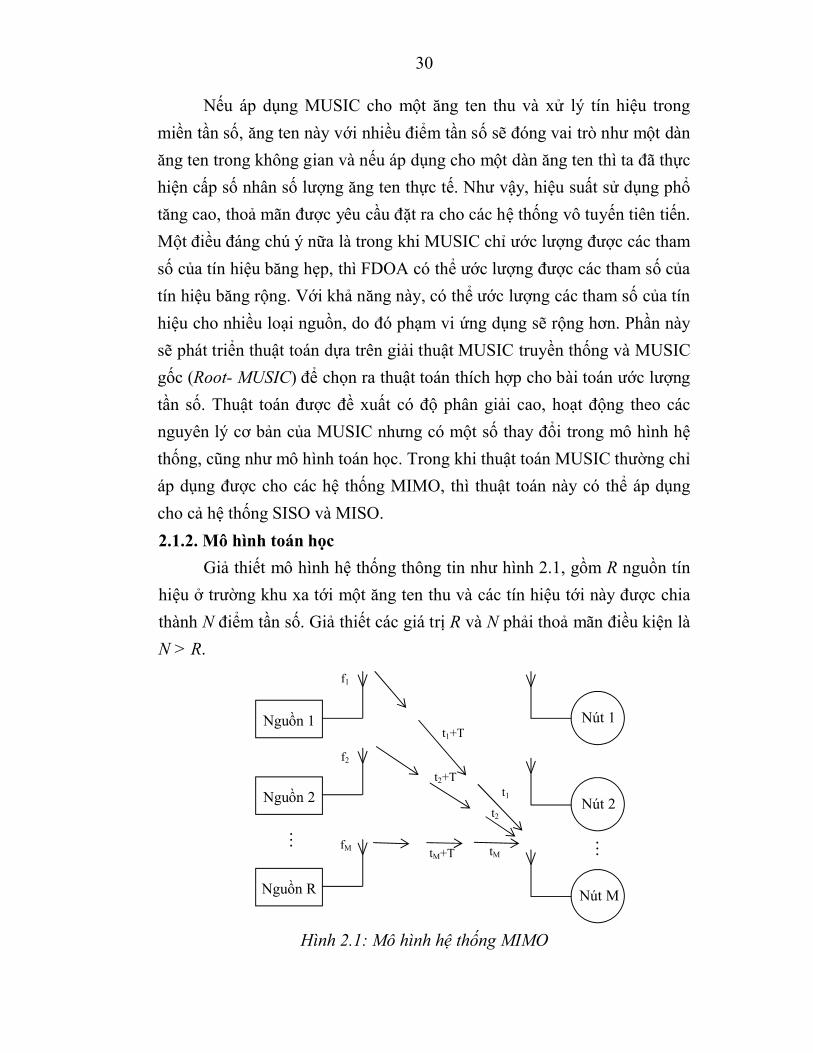
Giả thiết mô hình hệ thống thông tin như hình 2.1, gồm R nguồn tín
hiệu ở trường khu xa tới một ăng ten thu và các tín hiệu tới này được chia
thành N điểm tần số. Giả thiết các giá trị R và N phải thoả mãn điều kiện là
N > R.
Hình 2.1: Mô hình hệ thống MIMO
Nguồn 1 Nút 1
Nguồn 2
Nguồn R
f1
f2
fM
t1+T
t2+T
tM+T
t1
t2
tM
Nút 2
Nút M

31
Tín hiệu ra thu từ ăng ten tại tần số thứ thi được tính như sau:
1( ) ( ) exp( ) ( )
R
i k k ikx t s t n t
(2.1)
Với )(tsk là tín hiệu tới từ nguồn thứ thk và )(tni là nhiễu trắng tại máy thu tại
tần số thứ thi .
Chuyển công thức (2.1) về dạng ma trận, ta có:
)()(.)( tNtSAtX (2.2)
Với 1 2( ) ( ), ( ),....., ( ),....., ( )T
k NX t x t x t x t x t
1 2( ) ( ), ( ),....., ( ),....., ( )T
k RS t s t s t s t s t
1 2( ) ( ), ( ),....., ( ),....., ( )T
k NN t n t n t n t n t
1 2( ), ( ),....., ( ),....., ( )k RA a f a f a f a f
Có hai hướng để xây dựng thuật toán có độ phân giải cao hay còn gọi là
siêu phân giải.
Thuật toán 1:
Phát triển thuật toán 1 từ root-MUSIC:
/)2sin(2 kkk tfj
Ở đây, A là ma trận chứa véc tơ chỉ tần thay cho ma trận chứa véc tơ chỉ
hướng như bình thường. Mỗi véc tơ chỉ tần số có dạng như sau:
1 2 1( ) 1, , ,..., ,...,k Na f z z z z
)/)2sin(2( iftjez với Δ là thành phần chỉ tương ứng với khoảng cách giữa
hai phần tử trong dàn, λ là bước sóng của tín hiệu.
Thuật toán 2:
Thuật toán 2 được phát triển từ thuật toán MUSIC thông thường.
kkk tfj 2
12( ) [1, j fta f e 22, ,j fte …. 32, j fte … 12, Nj fte ]
Trong cả hai thuật toán trên thì Titti )1(0 với i = 1÷ N
Ở 0t , ăng ten bắt đầu nhận các tín hiệu và nó mất thời gian T để quét.

32
Các hàm tự tương quan là:
2
1
1( ) ( ) ( ) ( ) . . .sampleTH H H
XX SS otsample
R E X t X t X t X t AR A IT
(2.3)
( ) ( )HSSR E S t S t
Với S là véc tơ của các tín hiệu phát hay của nguồn và 2o là công suất
nhiễu của từng kênh.
Từ (2.3) ta có:
HNN
HSSS
N
i
HiiiXX EEEEeeR 2
1
(2.4)
với 1,....,S RE e e là không gian con tín hiệu, và 1....N R NE e e là không
gian con nhiễu.
Các điều kiện cần cho các véc tơ riêng là:
1) 21 2 1 2... ...R R R N o
2) 1. 1.. ( )... ( )R N Re e a f a f
Có thể tạo ra phổ giả từ thuật toán MUSIC. Để được như vậy, xây dựng
công thức ước lượng công suất của các tần số khác nhau rồi đánh giá:
)(..)(
1)(
faEEfafP
HN
HMUSIC
N
(2.5)
Nếu lấy các giá trị khác nhau của f, thì có thể tạo nên hình ảnh phổ
giả với các đỉnh ở các giá trị 0. Đây là cách thích hợp để vẽ phổ giả, thay
cho việc sử dụng các phương pháp khác.
2.1.3. Kết quả mô phỏng
Để biểu diễn hoạt động của thuật toán 1 và thuật toán 2, ta tạo một
hệ thống gồm 5 nguồn tín hiệu và 1 ăng ten thu. Các tần số của các sóng
mang là 1,2GHz; 1,4GHz; 2,3GHz; 2,6GHz và 3,7GHz. SNR của các sóng
mang là các giá trị ngẫu nhiên từ 1dB tới 20dB. Theo giả thuyết, những tín
hiệu này là không xác định và độc lập tuyến tính với nhau. Nói cách khác,
các tín hiệu này không tương quan. Chọn dải tần số ước lượng là từ 1GHz
tới 5GHz và dải tần số này được chia thành 15 điểm tần số cách đều nhau.
33
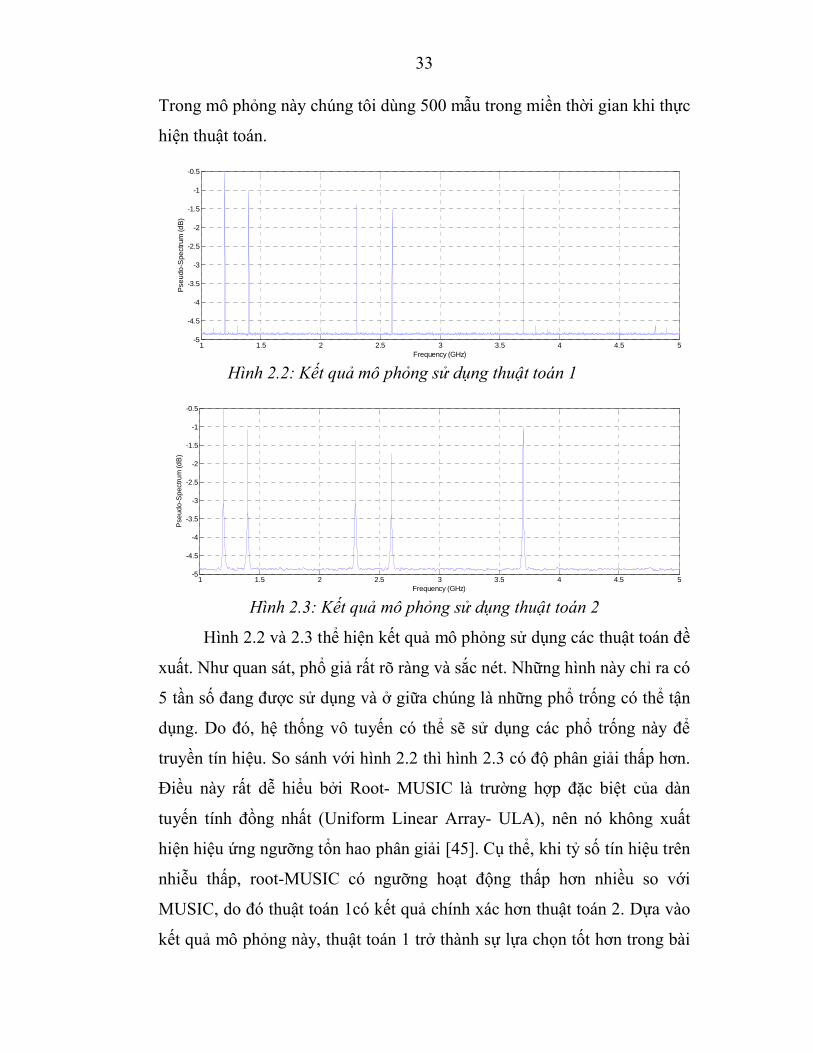
Trong mô phỏng này chúng tôi dùng 500 mẫu trong miền thời gian khi thực
hiện thuật toán.
Hình 2.2: Kết quả mô phỏng sử dụng thuật toán 1
Hình 2.3: Kết quả mô phỏng sử dụng thuật toán 2
Hình 2.2 và 2.3 thể hiện kết quả mô phỏng sử dụng các thuật toán đề
xuất. Như quan sát, phổ giả rất rõ ràng và sắc nét. Những hình này chỉ ra có
5 tần số đang được sử dụng và ở giữa chúng là những phổ trống có thể tận
dụng. Do đó, hệ thống vô tuyến có thể sẽ sử dụng các phổ trống này để
truyền tín hiệu. So sánh với hình 2.2 thì hình 2.3 có độ phân giải thấp hơn.
Điều này rất dễ hiểu bởi Root- MUSIC là trường hợp đặc biệt của dàn
tuyến tính đồng nhất (Uniform Linear Array- ULA), nên nó không xuất
hiện hiệu ứng ngưỡng tổn hao phân giải [45]. Cụ thể, khi tỷ số tín hiệu trên
nhiễu thấp, root-MUSIC có ngưỡng hoạt động thấp hơn nhiều so với
MUSIC, do đó thuật toán 1có kết quả chính xác hơn thuật toán 2. Dựa vào
kết quả mô phỏng này, thuật toán 1 trở thành sự lựa chọn tốt hơn trong bài
1 1.5 2 2.5 3 3.5 4 4.5 5-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
Frequency (GHz)
Pse
udo
-Spe
ctru
m (d
B)
1 1.5 2 2.5 3 3.5 4 4.5 5-5
-4.5
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
Frequency (GHz)
Pse
udo
-Spe
ctru
m (d
B)
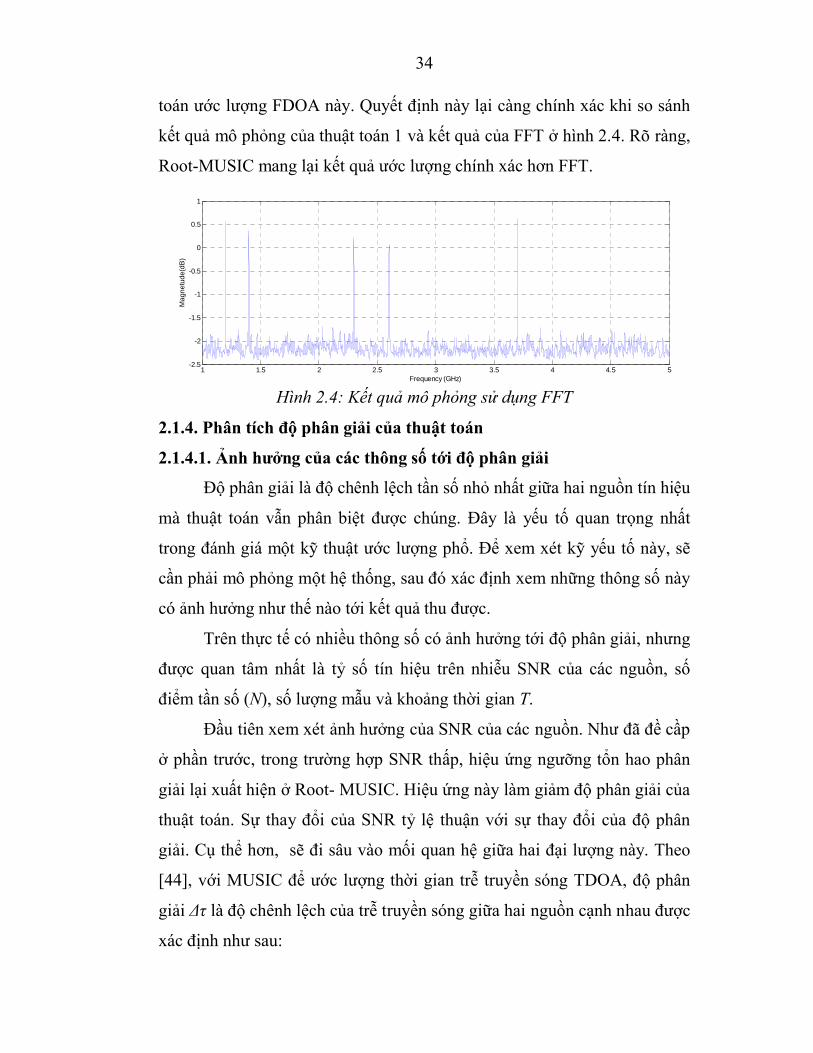
34
toán ước lượng FDOA này. Quyết định này lại càng chính xác khi so sánh
kết quả mô phỏng của thuật toán 1 và kết quả của FFT ở hình 2.4. Rõ ràng,
Root-MUSIC mang lại kết quả ước lượng chính xác hơn FFT.
Hình 2.4: Kết quả mô phỏng sử dụng FFT
2.1.4. Phân tích độ phân giải của thuật toán
2.1.4.1. Ảnh hưởng của các thông số tới độ phân giải
Độ phân giải là độ chênh lệch tần số nhỏ nhất giữa hai nguồn tín hiệu
mà thuật toán vẫn phân biệt được chúng. Đây là yếu tố quan trọng nhất
trong đánh giá một kỹ thuật ước lượng phổ. Để xem xét kỹ yếu tố này, sẽ
cần phải mô phỏng một hệ thống, sau đó xác định xem những thông số này
có ảnh hưởng như thế nào tới kết quả thu được.
Trên thực tế có nhiều thông số có ảnh hưởng tới độ phân giải, nhưng
được quan tâm nhất là tỷ số tín hiệu trên nhiễu SNR của các nguồn, số
điểm tần số (N), số lượng mẫu và khoảng thời gian T.
Đầu tiên xem xét ảnh hưởng của SNR của các nguồn. Như đã đề cầp
ở phần trước, trong trường hợp SNR thấp, hiệu ứng ngưỡng tổn hao phân
giải lại xuất hiện ở Root- MUSIC. Hiệu ứng này làm giảm độ phân giải của
thuật toán. Sự thay đổi của SNR tỷ lệ thuận với sự thay đổi của độ phân
giải. Cụ thể hơn, sẽ đi sâu vào mối quan hệ giữa hai đại lượng này. Theo
[44], với MUSIC để ước lượng thời gian trễ truyền sóng TDOA, độ phân
giải Δτ là độ chênh lệch của trễ truyền sóng giữa hai nguồn cạnh nhau được
xác định như sau:
1 1.5 2 2.5 3 3.5 4 4.5 5-2.5
-2
-1.5
-1
-0.5
0
0.5
1
Frequency (GHz)
Ma
gn
etu
de
(dB
)
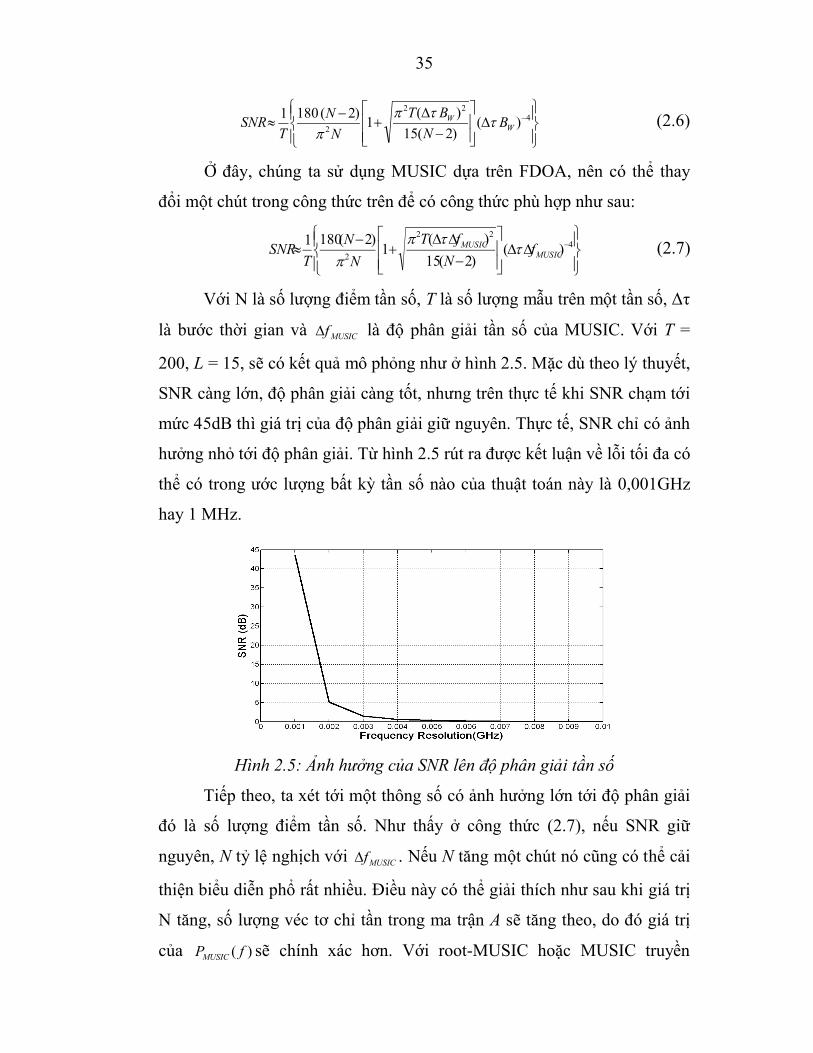
35
422
2)(
)2(15
)(1
)2(1801W
W BN
BT
N
N
TSNR
(2.6)
Ở đây, chúng ta sử dụng MUSIC dựa trên FDOA, nên có thể thay
đổi một chút trong công thức trên để có công thức phù hợp như sau:
422
2)(
)2(15
)(1
)2(1801MUSIC
MUSIC fN
fT
N
N
TSNR
(2.7)
Với N là số lượng điểm tần số, T là số lượng mẫu trên một tần số, Δτ
là bước thời gian và MUSICf là độ phân giải tần số của MUSIC. Với T =
200, L = 15, sẽ có kết quả mô phỏng như ở hình 2.5. Mặc dù theo lý thuyết,
SNR càng lớn, độ phân giải càng tốt, nhưng trên thực tế khi SNR chạm tới
mức 45dB thì giá trị của độ phân giải giữ nguyên. Thực tế, SNR chỉ có ảnh
hưởng nhỏ tới độ phân giải. Từ hình 2.5 rút ra được kết luận về lỗi tối đa có
thể có trong ước lượng bất kỳ tần số nào của thuật toán này là 0,001GHz
hay 1 MHz.
Hình 2.5: Ảnh hưởng của SNR lên độ phân giải tần số
Tiếp theo, ta xét tới một thông số có ảnh hưởng lớn tới độ phân giải
đó là số lượng điểm tần số. Như thấy ở công thức (2.7), nếu SNR giữ
nguyên, N tỷ lệ nghịch với MUSICf . Nếu N tăng một chút nó cũng có thể cải
thiện biểu diễn phổ rất nhiều. Điều này có thể giải thích như sau khi giá trị
N tăng, số lượng véc tơ chỉ tần trong ma trận A sẽ tăng theo, do đó giá trị
của )( fPMUSIC sẽ chính xác hơn. Với root-MUSIC hoặc MUSIC truyền
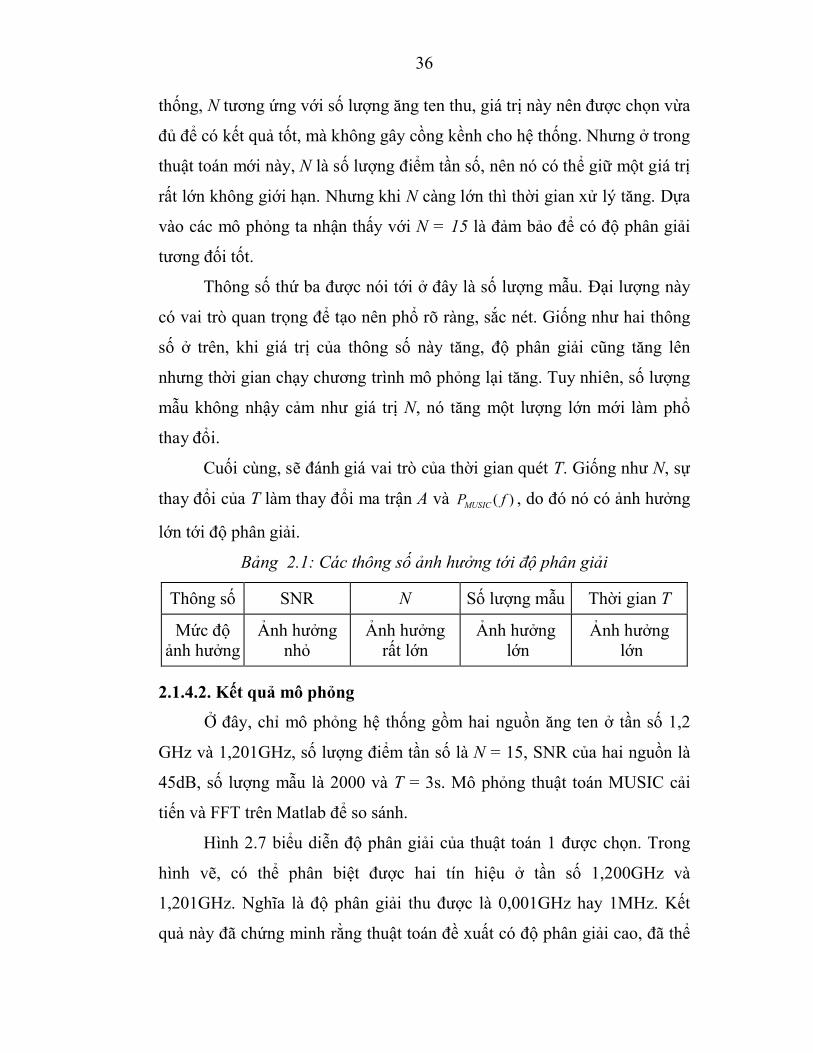
36
thống, N tương ứng với số lượng ăng ten thu, giá trị này nên được chọn vừa
đủ để có kết quả tốt, mà không gây cồng kềnh cho hệ thống. Nhưng ở trong
thuật toán mới này, N là số lượng điểm tần số, nên nó có thể giữ một giá trị
rất lớn không giới hạn. Nhưng khi N càng lớn thì thời gian xử lý tăng. Dựa
vào các mô phỏng ta nhận thấy với N = 15 là đảm bảo để có độ phân giải
tương đối tốt.
Thông số thứ ba được nói tới ở đây là số lượng mẫu. Đại lượng này
có vai trò quan trọng để tạo nên phổ rõ ràng, sắc nét. Giống như hai thông
số ở trên, khi giá trị của thông số này tăng, độ phân giải cũng tăng lên
nhưng thời gian chạy chương trình mô phỏng lại tăng. Tuy nhiên, số lượng
mẫu không nhậy cảm như giá trị N, nó tăng một lượng lớn mới làm phổ
thay đổi.
Cuối cùng, sẽ đánh giá vai trò của thời gian quét T. Giống như N, sự
thay đổi của T làm thay đổi ma trận A và )( fPMUSIC , do đó nó có ảnh hưởng
lớn tới độ phân giải.
Bảng 2.1: Các thông số ảnh hưởng tới độ phân giải
Thông số SNR N Số lượng mẫu Thời gian T
Mức độ ảnh hưởng
Ảnh hưởng nhỏ
Ảnh hưởngrất lớn
Ảnh hưởnglớn
Ảnh hưởnglớn
2.1.4.2. Kết quả mô phỏng
Ở đây, chỉ mô phỏng hệ thống gồm hai nguồn ăng ten ở tần số 1,2
GHz và 1,201GHz, số lượng điểm tần số là N = 15, SNR của hai nguồn là
45dB, số lượng mẫu là 2000 và T = 3s. Mô phỏng thuật toán MUSIC cải
tiến và FFT trên Matlab để so sánh.
Hình 2.7 biểu diễn độ phân giải của thuật toán 1 được chọn. Trong
hình vẽ, có thể phân biệt được hai tín hiệu ở tần số 1,200GHz và
1,201GHz. Nghĩa là độ phân giải thu được là 0,001GHz hay 1MHz. Kết
quả này đã chứng minh rằng thuật toán đề xuất có độ phân giải cao, đã thể
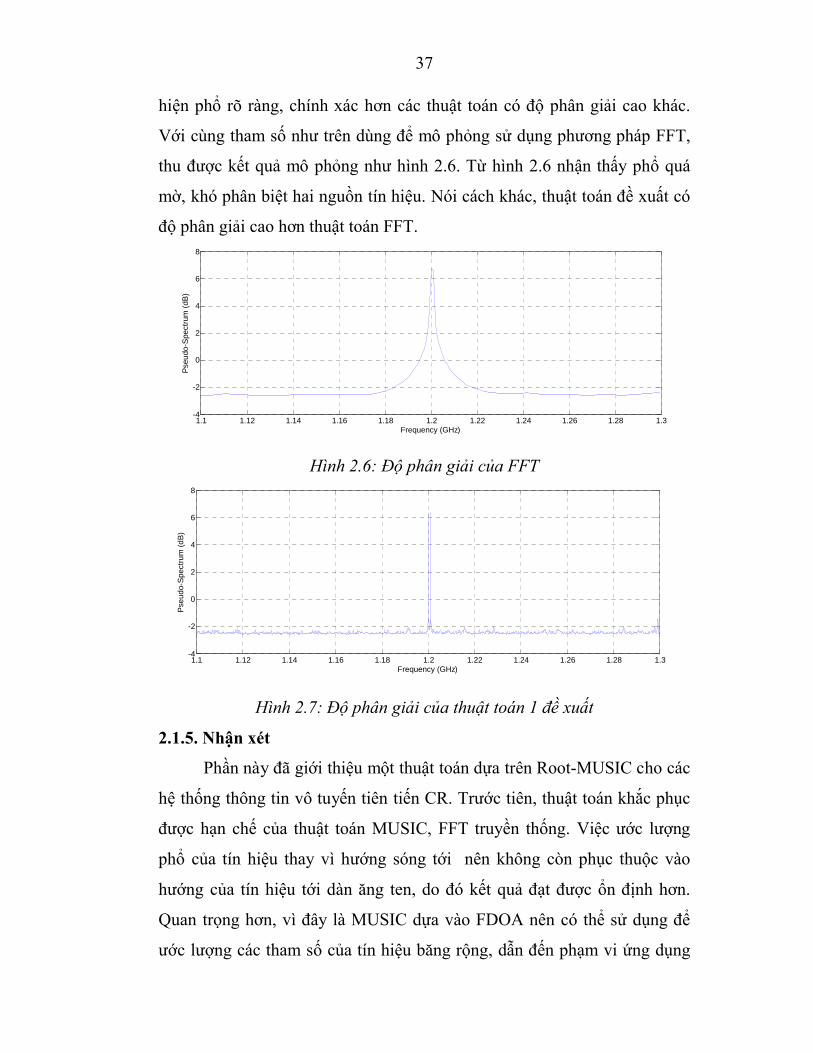
37
1.1 1.12 1.14 1.16 1.18 1.2 1.22 1.24 1.26 1.28 1.3-4
-2
0
2
4
6
8
Frequency (GHz)
Pse
udo-
Spe
ctru
m (
dB
)
1.1 1.12 1.14 1.16 1.18 1.2 1.22 1.24 1.26 1.28 1.3-4
-2
0
2
4
6
8
Frequency (GHz)
Pse
udo
-Spe
ctru
m (
dB)
hiện phổ rõ ràng, chính xác hơn các thuật toán có độ phân giải cao khác.
Với cùng tham số như trên dùng để mô phỏng sử dụng phương pháp FFT,
thu được kết quả mô phỏng như hình 2.6. Từ hình 2.6 nhận thấy phổ quá
mờ, khó phân biệt hai nguồn tín hiệu. Nói cách khác, thuật toán đề xuất có
độ phân giải cao hơn thuật toán FFT.
Hình 2.6: Độ phân giải của FFT
Hình 2.7: Độ phân giải của thuật toán 1 đề xuất
2.1.5. Nhận xét
Phần này đã giới thiệu một thuật toán dựa trên Root-MUSIC cho các
hệ thống thông tin vô tuyến tiên tiến CR. Trước tiên, thuật toán khắc phục
được hạn chế của thuật toán MUSIC, FFT truyền thống. Việc ước lượng
phổ của tín hiệu thay vì hướng sóng tới nên không còn phục thuộc vào
hướng của tín hiệu tới dàn ăng ten, do đó kết quả đạt được ổn định hơn.
Quan trọng hơn, vì đây là MUSIC dựa vào FDOA nên có thể sử dụng để
ước lượng các tham số của tín hiệu băng rộng, dẫn đến phạm vi ứng dụng
38
tăng lên. Với sự linh hoạt trong lựa chọn số lượng điểm tần số, có thể ước
lượng được số nguồn lớn mà vẫn thoả mãn điều kiện ban đầu của MUSIC
(N>M). Đặc biệt, thuật toán này giúp một ăng ten hoạt động như một dải
ăng ten, không chỉ giảm số lượng ăng ten cần thiết, tránh cồng kềnh cho hệ
thống, mà còn nâng cao hiệu suất sử dụng phổ. Với độ phân giải khoảng
1MHz, thuật toán này mang tới phổ giả rõ ràng, sắc nét hơn thuật toán FFT.
Đáng chú ý nhất, phương pháp này mang lại giá trị công suất thực tế bên
cạnh biểu diễn phổ giả như mọi thuật toán khác. Với những ưu điểm nổi bật
này, thuật toán đề xuất có khả năng ước lượng tham số tần số một cách
hiệu quả trong các hệ thống thông tin vô tuyến tiên tiến.
2.2. Đề xuất giải pháp ước lượng dịch tần sóng mang CFO trong hệ
thống thông tin vô tuyến MIMO
2.2.1. Giới thiệu
Hiện nay, hệ thống MIMO với đa ăng ten ở cả phía phát và phía thu
đã thu hút được sự quan tâm rất lớn vì thu được dung lượng và hiệu suất
phổ cao. Do các luồng dữ liệu độc lập chia sẻ cùng dải tần và khe thời gian,
đã làm tăng hiệu suất phổ [11]. Để đạt được những ưu thế này, việc ước
lượng độ dịch tần sóng mang có vai trò quan trọng.
Sự không đồng bộ giữa bộ tạo dao động phía phát và phía thu, hiệu
ứng Doppler là hai nguyên nhân chính gây ra dịch tần sóng mang, làm ảnh
hưởng trực tiếp đến tín hiệu thu trong các hệ thống thông tin vô tuyến. Sự
sai lệch trong ước lượng dịch tần sóng mang sẽ làm giảm độ chính xác khi
ước lượng các tham số khác của hệ thống. Ngoài ra, sai số trong ước lượng
tham số hệ thống sẽ tác động tiêu cực đến xử lý tín hiệu không gian, đặc
biệt làm giảm hiệu suất phổ trong hệ thống thông tin MIMO. Do đó, để đạt
được hiệu suất của hệ thống MIMO như mong muốn, cần sử dụng phương
pháp ước lượng độ dịch tần phù hợp.
39
Có hai giải pháp để giải quyết vấn đề này. Giả sử độ dịch tần của các
kênh truyền dẫn giữa các cặp ăng ten thu, phát là giống nhau trong một hệ
thống MIMO. Điều này có nghĩa là việc ước lượng độ dịch tần đối với hệ
thống MIMO sẽ giống như đối với các hệ thống SISO. Do đó, các thuật
toán sử dụng phổ biến cho các hệ thống SISO sẽ được áp dụng trong các hệ
thống MIMO. Một trong các thuật toán là sử dụng phép biến đổi Fourier
rời rạc (DFT), bởi như [52] đánh giá, kỹ thuật dựa trên biến đổi Fourier rời
rạc tương tự như truyền dẫn số chế độ gói. Tuy nhiên, do số lượng mẫu rời
rạc bị giới hạn, nên thuật toán này có độ phân giải chưa cao và chưa đảm
bảo tính chính xác để áp dụng trong thực tế. Trong [13], một phương pháp
đơn giản hơn được đề xuất dựa trên phép đo độ dịch pha giữa các chuỗi ký
tự hoa tiêu (pilot) liên tiếp. Tuy đây là một cách tiếp cận hay, nhưng có một
số nhược điểm và bị giới hạn về phạm vi ứng dụng, điều này cần được khắc
phục. Trong phần này, điều chỉnh cách tiếp cận này như một đề xuất đầu
tiên gọi là thuật toán ma trận.
Trở lại với hệ thống MIMO, do kiến trúc đa ăng ten của chúng, có
nhiều độ dịch tần khác nhau tồn tại giữa các ăng ten phát và thu. Vì vậy,
các thuật toán sử dụng trong hệ thống SISO không thể áp dụng trực tiếp
vào hệ thống MIMO. Nhiều nghiên cứu về đồng bộ sóng mang trong hệ
thống MIMO đã được nghiên cứu. Một cách tiếp cận thông thường là dựa
trên việc lựa chọn chuỗi huấn luyện. Phương pháp sử dụng tính trực giao
của chuỗi hoa tiêu hoặc dựa trên không gian con để giải quyết vấn đề này
[12], [54]. Mặc dù những kỹ thuật này khá phức tạp để triển khai trong thực
tế, nhưng có thể khắc phục được hạn chế của DFT về độ phân giải. Trong
đề xuất đã cải tiến MUSIC để ước lượng CFO trong các hệ thống thông tin
vô tuyến MIMO. Trong đó, với cùng ý tướng MUSIC dựa trên FDOA, việc
ước lượng CFO sẽ dùng MUSIC - CFO thay vì dựa trên DOA như trong
[12]. Việc cải tiến này làm giảm sự phụ thuộc của hiệu suất hệ thống
MIMO vào DOA của ăng ten và đưa ra giải pháp tốt hơn.
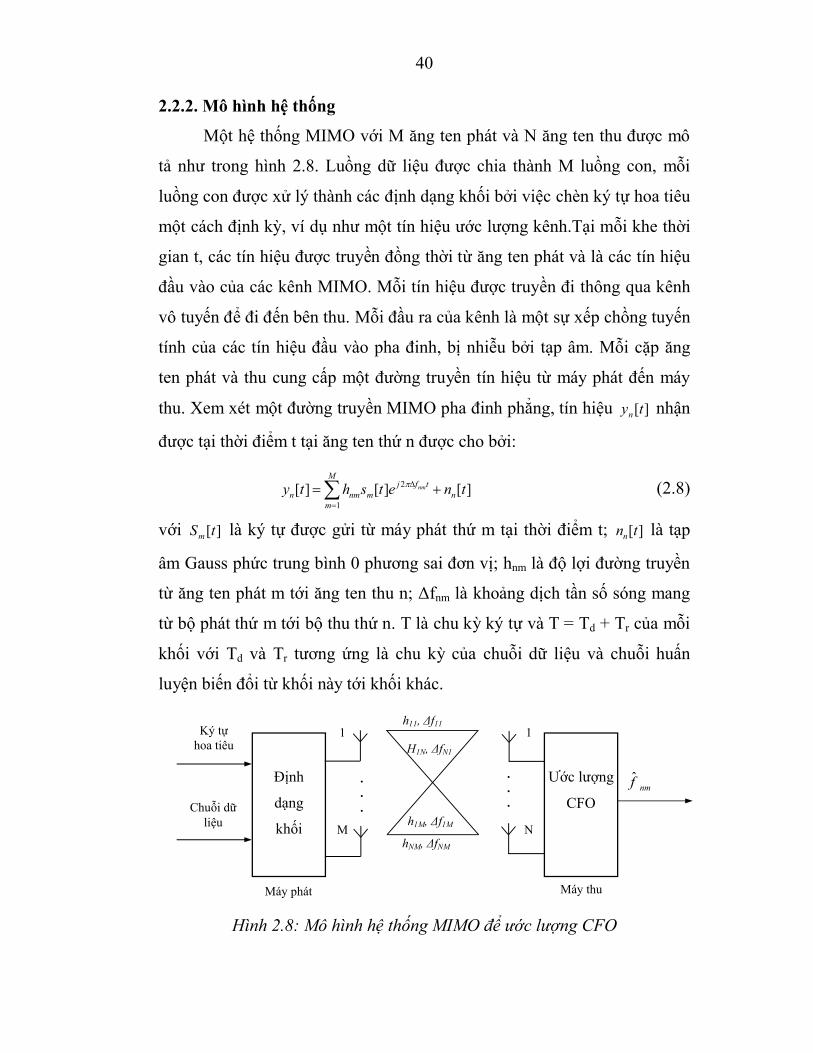
40
2.2.2. Mô hình hệ thống
Một hệ thống MIMO với M ăng ten phát và N ăng ten thu được mô
tả như trong hình 2.8. Luồng dữ liệu được chia thành M luồng con, mỗi
luồng con được xử lý thành các định dạng khối bởi việc chèn ký tự hoa tiêu
một cách định kỳ, ví dụ như một tín hiệu ước lượng kênh.Tại mỗi khe thời
gian t, các tín hiệu được truyền đồng thời từ ăng ten phát và là các tín hiệu
đầu vào của các kênh MIMO. Mỗi tín hiệu được truyền đi thông qua kênh
vô tuyến để đi đến bên thu. Mỗi đầu ra của kênh là một sự xếp chồng tuyến
tính của các tín hiệu đầu vào pha đinh, bị nhiễu bởi tạp âm. Mỗi cặp ăng
ten phát và thu cung cấp một đường truyền tín hiệu từ máy phát đến máy
thu. Xem xét một đường truyền MIMO pha đinh phẳng, tín hiệu ][tyn nhận
được tại thời điểm t tại ăng ten thứ n được cho bởi:
2
1
[ ] [ ] [ ]nm
Mj f t
n nm m nm
y t h s t e n t
(2.8)
với ][tSm là ký tự được gửi từ máy phát thứ m tại thời điểm t; [ ]nn t là tạp
âm Gauss phức trung bình 0 phương sai đơn vị; hnm là độ lợi đường truyền
từ ăng ten phát m tới ăng ten thu n; Δfnm là khoảng dịch tần số sóng mang
từ bộ phát thứ m tới bộ thu thứ n. T là chu kỳ ký tự và T = Td + Tr của mỗi
khối với Td và Tr tương ứng là chu kỳ của chuỗi dữ liệu và chuỗi huấn
luyện biến đổi từ khối này tới khối khác.
Hình 2.8: Mô hình hệ thống MIMO để ước lượng CFO
Ký tự hoa tiêu
Chuỗi dữ liệu
Máy phát Máy thu
ˆnmf
h11, Δf11
hNM, ΔfNM
1
M
1
N
H1N, ΔfN1
h1M, Δf1M
Định
dạng
khối
Ước lượng
CFO
.
.
.
.
.
.
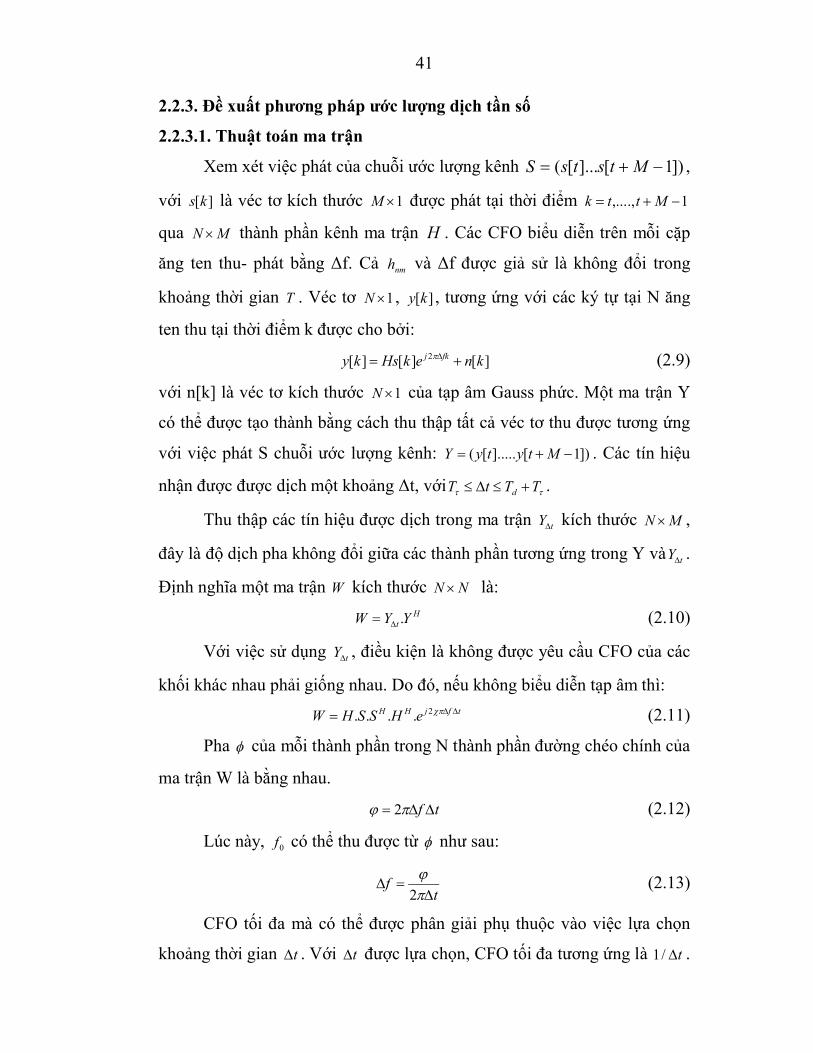
41
2.2.3. Đề xuất phương pháp ước lượng dịch tần số
2.2.3.1. Thuật toán ma trận
Xem xét việc phát của chuỗi ước lượng kênh ])1[]...[( MtstsS ,
với ][ks là véc tơ kích thước 1M được phát tại thời điểm 1,...., Mttk
qua MN thành phần kênh ma trận H . Các CFO biểu diễn trên mỗi cặp
ăng ten thu- phát bằng Δf. Cả nmh và Δf được giả sử là không đổi trong
khoảng thời gian T . Véc tơ 1N , ][ky , tương ứng với các ký tự tại N ăng
ten thu tại thời điểm k được cho bởi: 2[ ] [ ] [ ]j fky k Hs k e n k (2.9)
với n[k] là véc tơ kích thước 1N của tạp âm Gauss phức. Một ma trận Y
có thể được tạo thành bằng cách thu thập tất cả véc tơ thu được tương ứng
với việc phát S chuỗi ước lượng kênh: ( [ ]..... [ 1])Y y t y t M . Các tín hiệu
nhận được được dịch một khoảng Δt, với TTtT d .
Thu thập các tín hiệu được dịch trong ma trận tY kích thước MN ,
đây là độ dịch pha không đổi giữa các thành phần tương ứng trong Y và tY .
Định nghĩa một ma trận W kích thước NN là:
. HtW Y Y (2.10)
Với việc sử dụng tY , điều kiện là không được yêu cầu CFO của các
khối khác nhau phải giống nhau. Do đó, nếu không biểu diễn tạp âm thì:
2. . . .H H j f tW H S S H e (2.11)
Pha của mỗi thành phần trong N thành phần đường chéo chính của
ma trận W là bằng nhau.
2 f t (2.12)
Lúc này, 0f có thể thu được từ như sau:
2
ft
(2.13)
CFO tối đa mà có thể được phân giải phụ thuộc vào việc lựa chọn
khoảng thời gian t . Với t được lựa chọn, CFO tối đa tương ứng là t/1 .

42
Bởi t tối thiểu mà có thể được lựa chọn là T , CFO tối đa mà có thể được
phân giải trong mô hình hệ thống là:
max
1f
T (2.14)
2.2.3.2. Thuật toán MUSIC
Giả sử rằng một hệ thống chứa M nguồn tín hiệu với M khoảng dịch
tần số sóng mang khác nhau đi tới N ăng ten thu, các tín hiệu riêng biệt từ
ăng ten phát thứ m tới N ăng ten thu có cùng CFO là Δ mf , những tín hiệu
này rời rạc và độc lập tuyến tính với nhau.
Tín hiệu đầu ra ][tyn từ ăng ten thứ n tại thời điểm t được tính như sau:
2
1
[ ] [ ] [ ]m
Mf t
n mn m nm
y t h s t ej n t
(2.15)
Nếu M ăng ten phát gửi một khối P ký tự hoa tiêu, véc tơ tín hiệu nhận
được tại đầu ra của ăng ten thu thứ n là:T
nnn Ptytyy )])1([]...[(
Lấy yyR là ma trận PP cho ny ,
IAGAyyER n
HH
nnyy .}{ 2 (2.16)
với
)...( 1 MaaA
2 ( 1) )( [ ]... [ ( 1) ])mj P f Tm m ma s t s t P e
),...,( 1 MggdiagG
2
nmm hg
Giả sử rằng MP , do đó ma trận yyR là hạng đầy đủ (hạng lớn nhất có thể).
Ta có p .....21 và puuu ,......,, 21 tương ứng là các giá trị riêng và
véc tơ riêng của yyR .
P
i
H
iiiyy uuR1
(2.17)

43
Ở đây, ),.....,(),...,( 11 MM aaspanuuspan là không gian con tín hiệu,
),......,( 1 PM uuspan là không gian con tạp âm.
Vì không gian con tín hiệu và không gian con tạp âm là trực giao, bất
kỳ véc tơ nào từ không gian con tín hiệu cũng trực giao với không gian con
tạp âm.
Lấy 2 ( 1)( ) ( [ ]... [ ( 1)] )j P f Ta f s t s t P e
Khi nmf f , thì đối với bất kỳ véc tơ x nào trong không gian con
tạp âm, ta có:
( ) 0Ha f x (2.18)
Lấy 2
1
( ) | ( ) |P
Hk
k M
Q f a f u
Khi đó, về mặt lý thuyết, khi nmf f thì ( ) 0Q f , và 1/ ( )Q f là vô
hạn. Do đó, một đồ thị của hàm có đỉnh tại nmf f .
2
1
1( )
| ( ) |P
Hk
k M
P fa f u
(2.19)
Nếu quét các giá trị Δf khác nhau, ta có thể xác định đỉnh phổ giả
của hàm P(Δf). Đây là một cách tốt để thấy phổ nhìn như thế nào, thay vì
sử dụng phương pháp tiếp cận không tham số như đồ thị chu kỳ. Xem xét
các phổ giả, có thể ước lượng các CFO bằng mắt, tuy nhiên cũng có thể thu
được việc ước lượng Δ nmf bằng việc chọn các giá trị Δ nmf khi hàm ( )P f
được tối đa.
arg max ( )mnf
f P f (2.20)
2.2.4. Kết quả mô phỏng
Để đánh giá hiệu quả của thuật toán ma trận đề xuất ở trên, tiến hành
mô phỏng với một hệ thống gồm 5 nguồn tín hiệu và 40 ăng ten. CFO của
các nguồn được gán là 1,2 KHz; 1,3 KHz, 2,5 KHz; 3,3 KHz và 4,2 KHz.
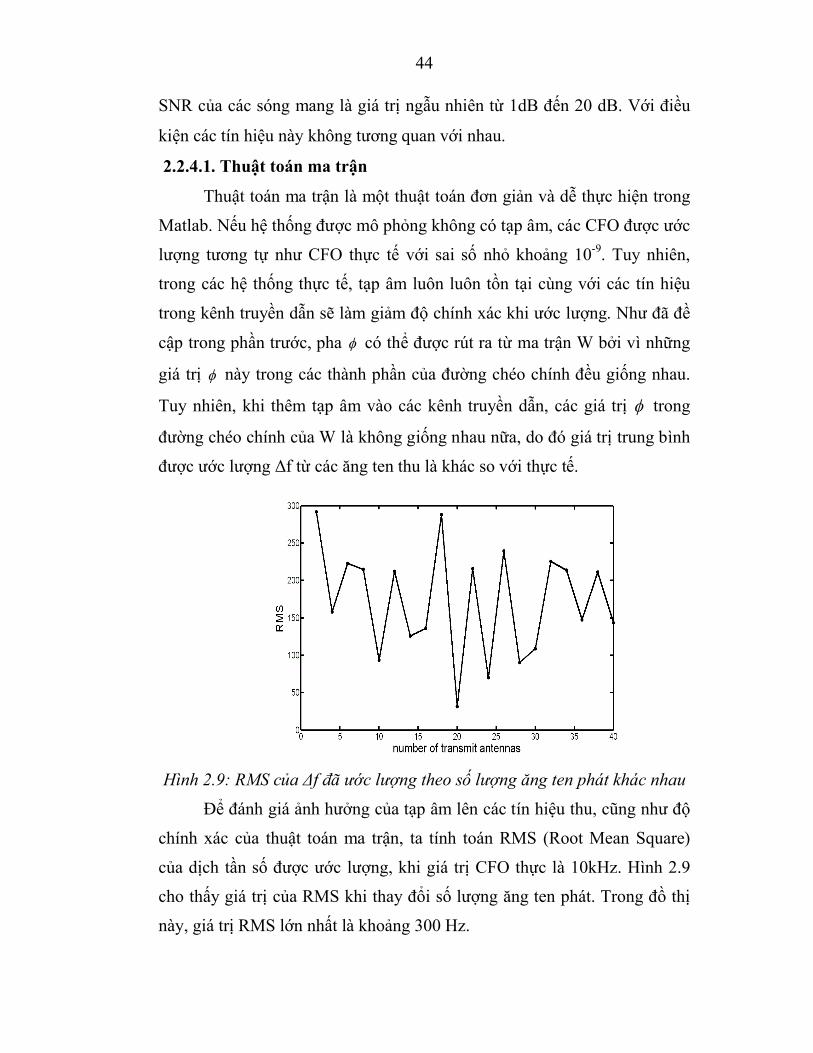
44
SNR của các sóng mang là giá trị ngẫu nhiên từ 1dB đến 20 dB. Với điều
kiện các tín hiệu này không tương quan với nhau.
2.2.4.1. Thuật toán ma trận
Thuật toán ma trận là một thuật toán đơn giản và dễ thực hiện trong
Matlab. Nếu hệ thống được mô phỏng không có tạp âm, các CFO được ước
lượng tương tự như CFO thực tế với sai số nhỏ khoảng 10-9. Tuy nhiên,
trong các hệ thống thực tế, tạp âm luôn luôn tồn tại cùng với các tín hiệu
trong kênh truyền dẫn sẽ làm giảm độ chính xác khi ước lượng. Như đã đề
cập trong phần trước, pha có thể được rút ra từ ma trận W bởi vì những
giá trị này trong các thành phần của đường chéo chính đều giống nhau.
Tuy nhiên, khi thêm tạp âm vào các kênh truyền dẫn, các giá trị trong
đường chéo chính của W là không giống nhau nữa, do đó giá trị trung bình
được ước lượng Δf từ các ăng ten thu là khác so với thực tế.
Hình 2.9: RMS của Δf đã ước lượng theo số lượng ăng ten phát khác nhau
Để đánh giá ảnh hưởng của tạp âm lên các tín hiệu thu, cũng như độ
chính xác của thuật toán ma trận, ta tính toán RMS (Root Mean Square)
của dịch tần số được ước lượng, khi giá trị CFO thực là 10kHz. Hình 2.9
cho thấy giá trị của RMS khi thay đổi số lượng ăng ten phát. Trong đồ thị
này, giá trị RMS lớn nhất là khoảng 300 Hz.
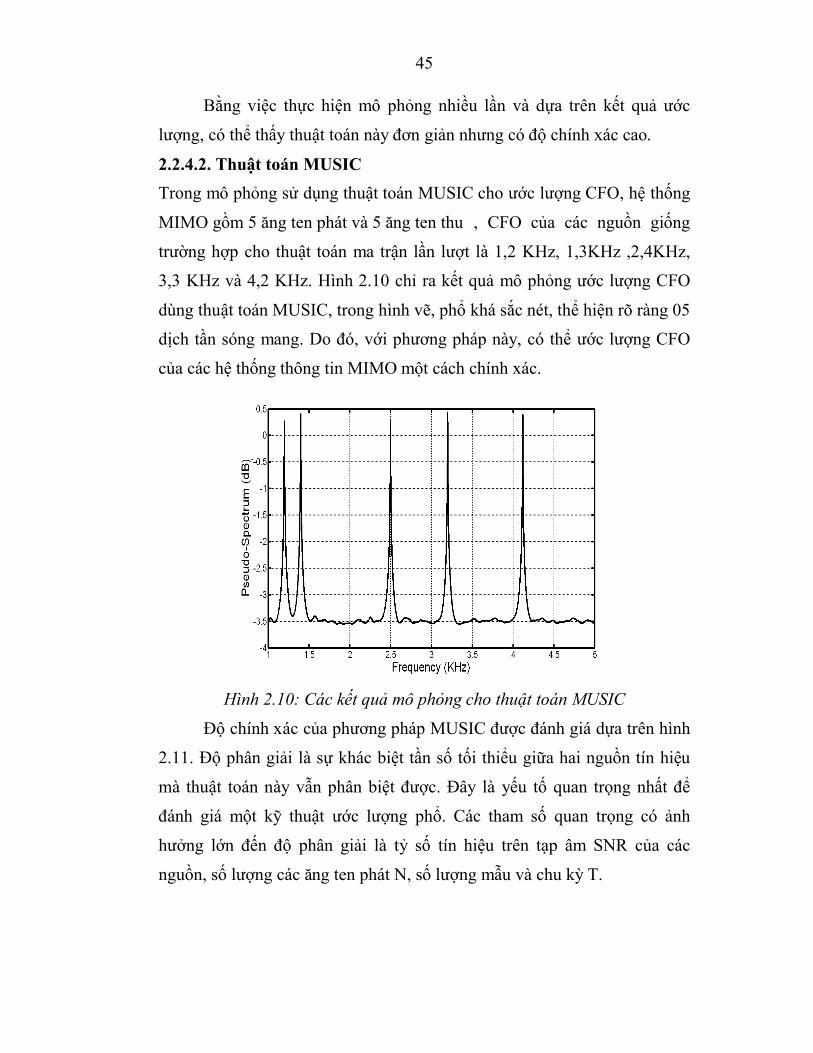
45
Bằng việc thực hiện mô phỏng nhiều lần và dựa trên kết quả ước
lượng, có thể thấy thuật toán này đơn giản nhưng có độ chính xác cao.
2.2.4.2. Thuật toán MUSIC
Trong mô phỏng sử dụng thuật toán MUSIC cho ước lượng CFO, hệ thống
MIMO gồm 5 ăng ten phát và 5 ăng ten thu , CFO của các nguồn giống
trường hợp cho thuật toán ma trận lần lượt là 1,2 KHz, 1,3KHz ,2,4KHz,
3,3 KHz và 4,2 KHz. Hình 2.10 chỉ ra kết quả mô phỏng ước lượng CFO
dùng thuật toán MUSIC, trong hình vẽ, phổ khá sắc nét, thể hiện rõ ràng 05
dịch tần sóng mang. Do đó, với phương pháp này, có thể ước lượng CFO
của các hệ thống thông tin MIMO một cách chính xác.
Hình 2.10: Các kết quả mô phỏng cho thuật toán MUSIC
Độ chính xác của phương pháp MUSIC được đánh giá dựa trên hình
2.11. Độ phân giải là sự khác biệt tần số tối thiểu giữa hai nguồn tín hiệu
mà thuật toán này vẫn phân biệt được. Đây là yếu tố quan trọng nhất để
đánh giá một kỹ thuật ước lượng phổ. Các tham số quan trọng có ảnh
hưởng lớn đến độ phân giải là tỷ số tín hiệu trên tạp âm SNR của các
nguồn, số lượng các ăng ten phát N, số lượng mẫu và chu kỳ T.
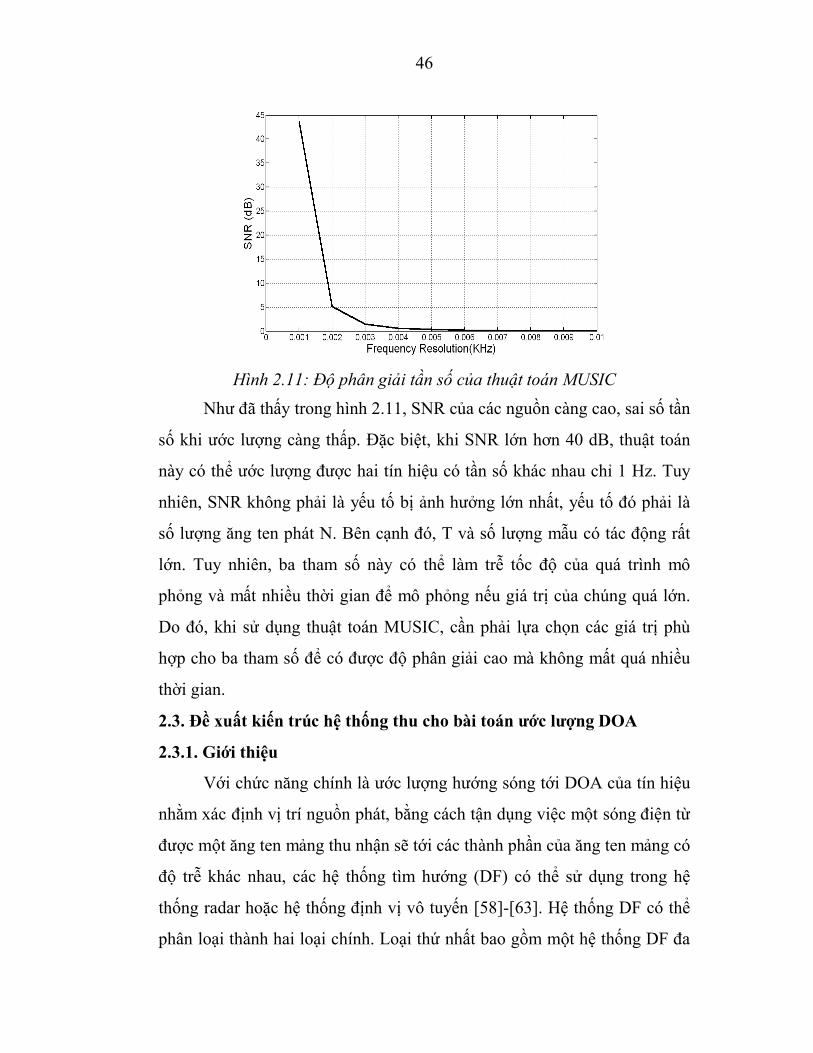
46
Hình 2.11: Độ phân giải tần số của thuật toán MUSIC
Như đã thấy trong hình 2.11, SNR của các nguồn càng cao, sai số tần
số khi ước lượng càng thấp. Đặc biệt, khi SNR lớn hơn 40 dB, thuật toán
này có thể ước lượng được hai tín hiệu có tần số khác nhau chỉ 1 Hz. Tuy
nhiên, SNR không phải là yếu tố bị ảnh hưởng lớn nhất, yếu tố đó phải là
số lượng ăng ten phát N. Bên cạnh đó, T và số lượng mẫu có tác động rất
lớn. Tuy nhiên, ba tham số này có thể làm trễ tốc độ của quá trình mô
phỏng và mất nhiều thời gian để mô phỏng nếu giá trị của chúng quá lớn.
Do đó, khi sử dụng thuật toán MUSIC, cần phải lựa chọn các giá trị phù
hợp cho ba tham số để có được độ phân giải cao mà không mất quá nhiều
thời gian.
2.3. Đề xuất kiến trúc hệ thống thu cho bài toán ước lượng DOA
2.3.1. Giới thiệu
Với chức năng chính là ước lượng hướng sóng tới DOA của tín hiệu
nhằm xác định vị trí nguồn phát, bằng cách tận dụng việc một sóng điện từ
được một ăng ten mảng thu nhận sẽ tới các thành phần của ăng ten mảng có
độ trễ khác nhau, các hệ thống tìm hướng (DF) có thể sử dụng trong hệ
thống radar hoặc hệ thống định vị vô tuyến [58]-[63]. Hệ thống DF có thể
phân loại thành hai loại chính. Loại thứ nhất bao gồm một hệ thống DF đa
47
kênh sử dụng một kênh thu trên mỗi ăng ten [58][59]. Các tín hiệu tới tất cả
các ăng ten được quan sát đồng thời bởi nhiều máy thu. Có thể dùng các
máy thu RF số và tương tự hoặc hoàn toàn số cho mỗi thành phần của
mảng ăng ten như một kênh thu tín hiệu riêng và để ước lượng DOA của
nguồn phát phải dùng các thuật toán có độ phức tạp cao.
Kiến trúc thứ hai là các hệ thống DF đơn kênh sử dụng một máy thu
với nhiều phần tử ăng ten trong một mảng cùng với một số dạng chuyển
mạch giữa các phần tử [62], [63]. Trong hệ thống loại này, các tín hiệu đến
được quan sát theo thứ tự lần lượt qua các phần tử ăng ten trong dàn.
Các hệ thống DF đơn kênh có một số ưu điểm so với hệ thống đa
kênh về kích thước, trọng lượng, giá thành thực hiện và yêu cầu về tính di
động. Ưu điểm chính của hệ thống chuyển mạch là giảm giá thành phần
cứng. Trên thực tế, trong các hệ thống này, chỉ có một máy thu vô tuyến
hoạt động và cần ít kênh tín hiệu hơn, do đó giá thành giảm đáng kể. Một
ưu điểm khác là hệ thống chuyển mạch đơn kênh có thể đơn giản hơn trong
việc “chuẩn hóa” hệ thống. Điểm hạn chế chính của hệ thống chuyển mạch
so với hệ thống kênh đầy đủ là sự chính xác về thời gian, do số lượng dữ
liệu quan sát được nhỏ hơn trong cùng khoảng thời gian lấy mẫu. Hệ thống
DF đơn kênh cung cấp các đặc tính tương tự với một ăng ten mảng. Trong
các hệ thống này, một máy thu đơn có thể là máy thu số hoặc tương tự.
Trong phần này sẽ phát triển một hệ thống tìm hướng đơn kênh mới
bao gồm một mảng tuyến tính đồng đều đi kèm với chuyển mạch RF và
một kiến trúc máy thu hoàn toàn số. Hệ thống này sẽ giúp tìm ra DOA của
tín hiệu RF cần quan tâm. Phương pháp pha được sử dụng trong ước lượng
DOA.
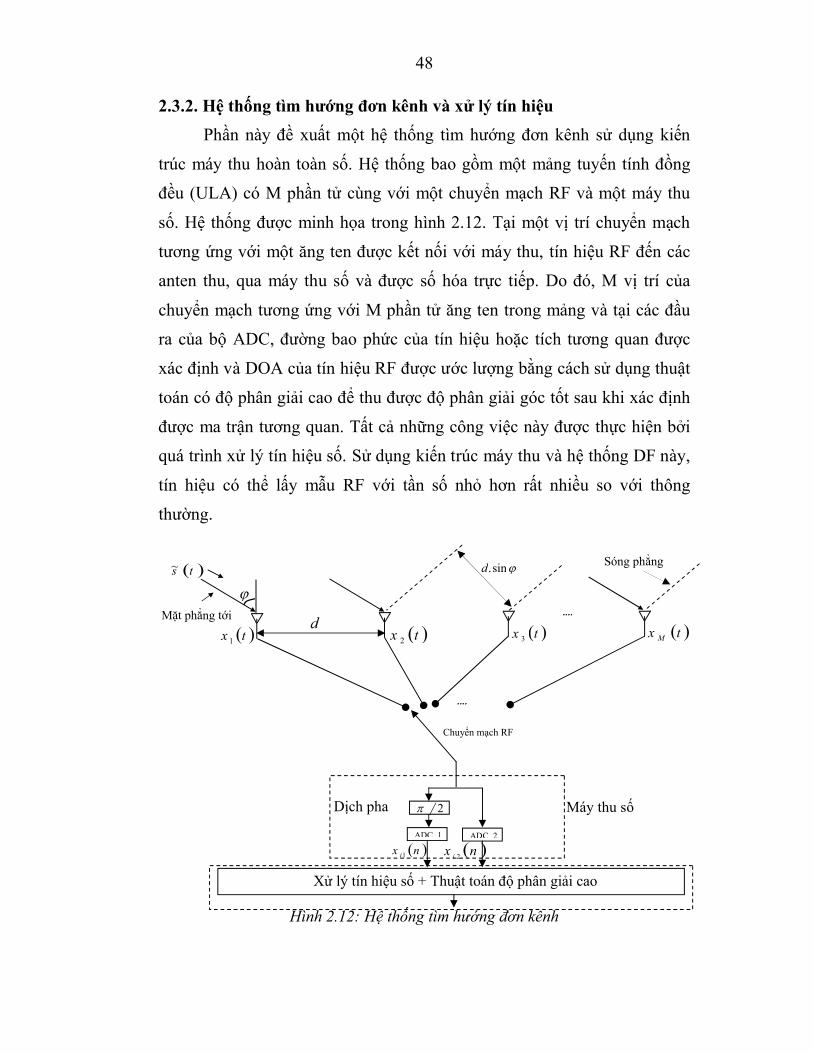
48
2.3.2. Hệ thống tìm hướng đơn kênh và xử lý tín hiệu
Phần này đề xuất một hệ thống tìm hướng đơn kênh sử dụng kiến
trúc máy thu hoàn toàn số. Hệ thống bao gồm một mảng tuyến tính đồng
đều (ULA) có M phần tử cùng với một chuyển mạch RF và một máy thu
số. Hệ thống được minh họa trong hình 2.12. Tại một vị trí chuyển mạch
tương ứng với một ăng ten được kết nối với máy thu, tín hiệu RF đến các
anten thu, qua máy thu số và được số hóa trực tiếp. Do đó, M vị trí của
chuyển mạch tương ứng với M phần tử ăng ten trong mảng và tại các đầu
ra của bộ ADC, đường bao phức của tín hiệu hoặc tích tương quan được
xác định và DOA của tín hiệu RF được ước lượng bằng cách sử dụng thuật
toán có độ phân giải cao để thu được độ phân giải góc tốt sau khi xác định
được ma trận tương quan. Tất cả những công việc này được thực hiện bởi
quá trình xử lý tín hiệu số. Sử dụng kiến trúc máy thu và hệ thống DF này,
tín hiệu có thể lấy mẫu RF với tần số nhỏ hơn rất nhiều so với thông
thường.
Hình 2.12: Hệ thống tìm hướng đơn kênh
Sóng phẳngsin.d
d
ts~
Mặt phẳng tới
Xử lý tín hiệu số + Thuật toán độ phân giải cao
Dịch pha
tx 1 tx 2 tx 3 tx M
nx i1 nx i 2
ADC_1
2
ADC_2
Chuyển mạch RF
Máy thu số
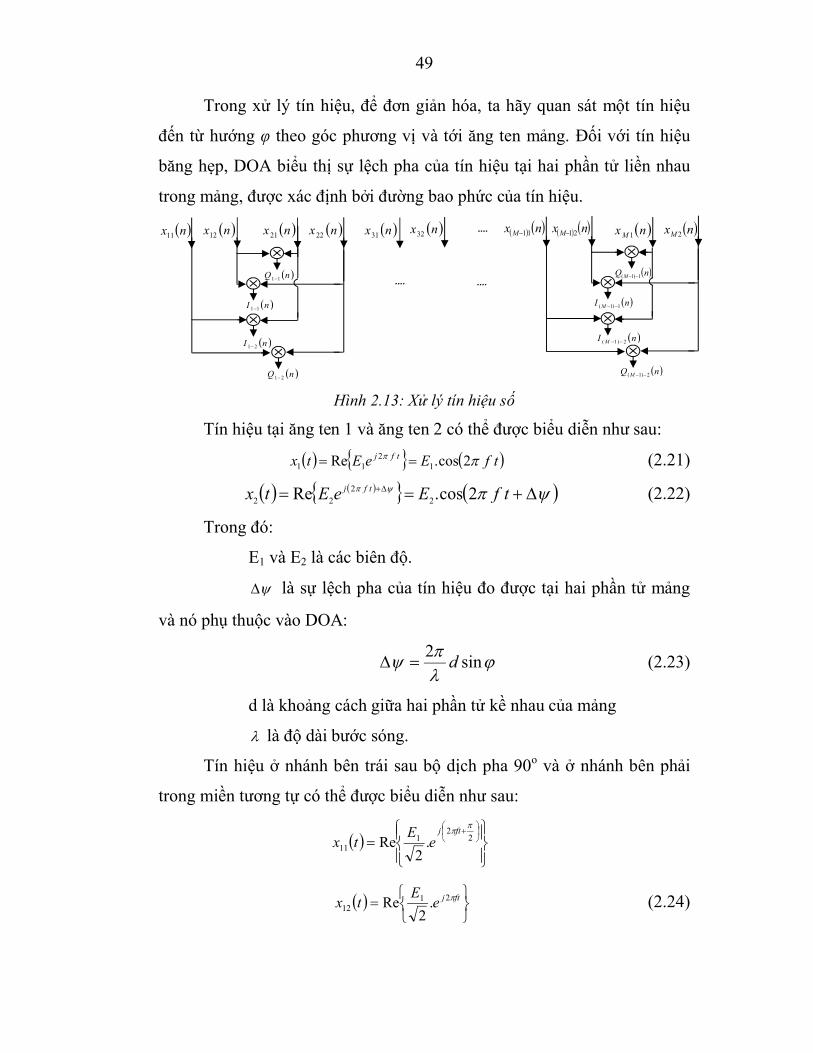
49
Trong xử lý tín hiệu, để đơn giản hóa, ta hãy quan sát một tín hiệu
đến từ hướng φ theo góc phương vị và tới ăng ten mảng. Đối với tín hiệu
băng hẹp, DOA biểu thị sự lệch pha của tín hiệu tại hai phần tử liền nhau
trong mảng, được xác định bởi đường bao phức của tín hiệu.
Hình 2.13: Xử lý tín hiệu số
Tín hiệu tại ăng ten 1 và ăng ten 2 có thể được biểu diễn như sau:
tfEeEtx tfj 2cos.Re 12
11 (2.21)
tfEeEtx tfj 2cos.Re 22
22 (2.22)
Trong đó:
E1 và E2 là các biên độ.
là sự lệch pha của tín hiệu đo được tại hai phần tử mảng
và nó phụ thuộc vào DOA:
sin
2d (2.23)
d là khoảng cách giữa hai phần tử kề nhau của mảng
là độ dài bước sóng.
Tín hiệu ở nhánh bên trái sau bộ dịch pha 90o và ở nhánh bên phải
trong miền tương tự có thể được biểu diễn như sau:
22
111 .
2Re
ftj
eE
tx
ftjeE
tx 2112 .
2Re (2.24)
nx11 nx12 nx21 nx22 nxM 1 nx31 nx32 nx M 11 nx M 21 nxM 2
nQ 11
nQ 21
nI 11
nI 21
nQ M 1)1(
nQ M 2)1(
nI M 1)1(
nI M 2)1(

50
22
221 .
2Re
ftj
eE
tx
ftje
Etx 22
22 .2
Re
Trong các máy thu tương tự thông thường, được trích lấy từ
đường bao phức sau khi giải điều chế I/Q. Trong kiến trúc này, có thể lấy
được thông số này từ quá trình xử lý tín hiệu số trong miền số dựa trên sự
kết hợp như trong hình 2.13 ở trên. Trong thực tế, phần thực I( n) và phần
ảo Q(n) của tích tương quan giữa tx1 và tx2 có thể thu được trong miền
số như sau:
cos.
2
..Re 21
221211
EEnxnxnI (2.25)
hoặc:
cos.
2
..Re 21
211121
EEnxnxnI (2.26)
Và sin.2
..Re 21*
221111
EEnxnxnQ (2.27)
hoặc:
sin.
2
..Re 21
112221
EEnxnxnQ (2.28)
Đường bao phức do đó có thể nhận được là:
njQnInh 11111 (2.29)
hoặc: njQnInh 21211 )(
Quá trình tương tự cũng được thực hiện tại các phần tử khác của
mảng để thu được các đường bao phức và véc tơ đầu ra của mảng được sắp
xếp như sau:
TM nhnhnhnhnx 1321 ,...,,, (2.30)
Ma trận hiệp phương sai dữ liệu tương ứng với công thức (2.30)
được cho như sau:
Hxx nxnxER . (2.31)
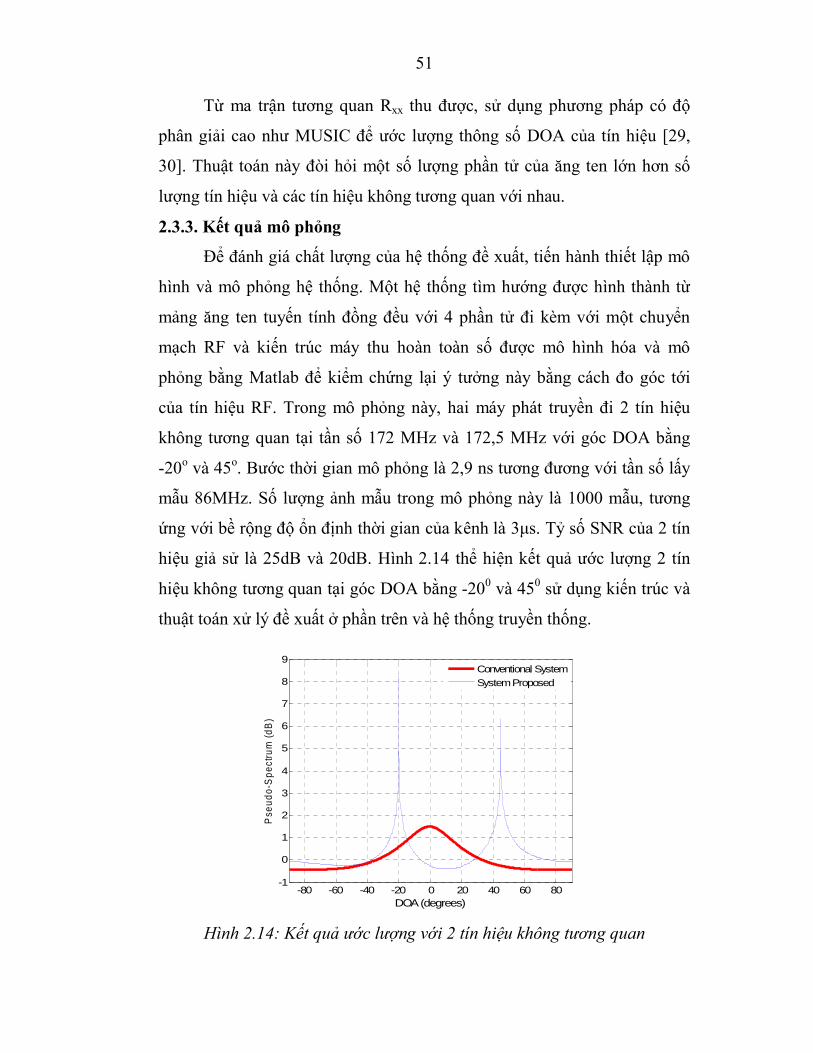
51
Từ ma trận tương quan Rxx thu được, sử dụng phương pháp có độ
phân giải cao như MUSIC để ước lượng thông số DOA của tín hiệu [29,
30]. Thuật toán này đòi hỏi một số lượng phần tử của ăng ten lớn hơn số
lượng tín hiệu và các tín hiệu không tương quan với nhau.
2.3.3. Kết quả mô phỏng
Để đánh giá chất lượng của hệ thống đề xuất, tiến hành thiết lập mô
hình và mô phỏng hệ thống. Một hệ thống tìm hướng được hình thành từ
mảng ăng ten tuyến tính đồng đều với 4 phần tử đi kèm với một chuyển
mạch RF và kiến trúc máy thu hoàn toàn số được mô hình hóa và mô
phỏng bằng Matlab để kiểm chứng lại ý tưởng này bằng cách đo góc tới
của tín hiệu RF. Trong mô phỏng này, hai máy phát truyền đi 2 tín hiệu
không tương quan tại tần số 172 MHz và 172,5 MHz với góc DOA bằng
-20o và 45o. Bước thời gian mô phỏng là 2,9 ns tương đương với tần số lấy
mẫu 86MHz. Số lượng ảnh mẫu trong mô phỏng này là 1000 mẫu, tương
ứng với bề rộng độ ổn định thời gian của kênh là 3μs. Tỷ số SNR của 2 tín
hiệu giả sử là 25dB và 20dB. Hình 2.14 thể hiện kết quả ước lượng 2 tín
hiệu không tương quan tại góc DOA bằng -200 và 450 sử dụng kiến trúc và
thuật toán xử lý đề xuất ở phần trên và hệ thống truyền thống.
-80 -60 -40 -20 0 20 40 60 80-1
0
1
2
3
4
5
6
7
8
9
DOA (degrees)
Pse
ud
o-S
pec
tru
m (d
B)
Conventional System
System Proposed
Hình 2.14: Kết quả ước lượng với 2 tín hiệu không tương quan
52
Ta có thể thấy trong hình này hai tín hiệu được ước lượng một cách
chính xác với DOA là -20o và 45o với hệ thống đề xuất, trong khi không thể
ước lượng được bằng hệ thống thông thường mà trong đó tín hiệu được số
hóa trực tiếp với cùng tần số lấy mẫu và không qua bộ chia công suất, bộ
dịch pha 90o.
Hệ thống tìm hướng được đề xuất có nhiều ưu điểm như giá thành
thấp hơn so với các hệ thống đa ăng ten, đa máy thu truyền thống, có thể
thiết lập lại bằng phần mềm, tốc độ lấy mẫu thấp vì chỉ sử dụng một máy
thu, tốc độ lấy mẫu của bộ ADC thấp. Tuy nhiên, cần chú ý rằng thời gian
chuyển mạch phải nhỏ hơn bề rộng độ ổn định thời gian của kênh .
2.3.4. Nhận xét
Phần này đã đề xuất một hệ thống tìm hướng đơn kênh. Hệ thống
được đề xuất bao gồm một mảng ăng ten tuyến tính đồng dạng cùng với
một chuyển mạch RF và kiến trúc máy thu hoàn toàn số. Hệ thống tìm
hướng với mục đích ước lượng DOA có thể được sử dụng trong nhiều ứng
dụng như trong các hệ thống radar, hệ thống định vị vô tuyến, … Ngoài ra,
một mô hình dữ liệu cho xử lý tín hiệu được trình bày và chất lượng DF với
độ phân giải cao được thể hiện qua mô phỏng. DOA được ước lượng sử
dụng thuật toán MUSIC.
Có thể thấy rằng hệ thống này cung cấp một giải pháp khả thi, giá
thành triển khai thấp mà độ phân giải góc lại cao trong khi chỉ cần sử dụng
một máy thu hoàn toàn số. Kiến trúc được đề xuất ở trên đối với DF là một
kiến trúc đầy hứa hẹn, có nhiều ưu điểm so với DF truyền thống, như tốc
độ lấy mẫu thấp, khả năng thiết lập lại,…
53
Kết luận chương 2
Chương 2 đã đề xuất một số ý tưởng mới nhằm ước lượng một tham
số của tín hiệu trong hệ thống thông tin vô tuyến. Thứ nhất là đề xuất một
thuật toán mới dựa trên thuật toán MUSIC để ước lượng tần số tới FDOA.
Thứ hai là đưa ra hai đề xuất cho việc ước lượng dịch tần số sóng mang-
CFO trong các hệ thống MIMO: Đề xuất đầu tiên là cải tiến từ giải pháp
cho hệ thống SISO, nó đơn giản và chính xác, nhưng lại yêu cầu CFO của
tất cả các nguồn phải bằng nhau tại cùng một thời điểm. Để giải quyết hạn
chế của đề xuất đầu tiên, đề xuất thứ hai được xây dựng có thể áp dụng với
những nguồn có CFO khác nhau. Thuật toán này được phát triển từ thuật
toán MUSIC truyền thống, nhưng dựa trên FDOA thay vì DOA nên có thể
áp dụng để ước lượng các tín hiệu băng rộng. Đặc biệt, có thể ước lượng
những nguồn tín hiệu có độ dịch tần số khác nhau và thay đổi theo thời
gian.
Thứ ba là đề xuất một hệ thống tìm hướng đơn kênh sử dụng cho hệ
thống thông tin vô tuyến, hệ thống ra đa hoặc định vị vô tuyến tiên tiến.
Phương án đề xuất dựa trên ăng ten chuyển hướng kết hợp với kiến trúc
máy thu hoàn toàn số, giúp số hóa các tín hiệu RF với tần số lấy mẫu thấp.
Kiến trúc mới được mô hình hóa và mô phỏng để kiểm chứng thông qua
ước lượng DOA của tín hiệu dùng thuật toán MUSIC.
54
CHƯƠNG 3:
THUẬT TOÁN ƯỚC LƯỢNG ĐỒNG THỜI NHIỀU THAM SỐ
CỦA TÍN HIỆU TRONG HỆ THỐNG THÔNG TIN VÔ TUYẾN
3.1. Thuật toán ước lượng đồng thời hướng sóng tới trong mặt phẳng
phương vị, tần số Doppler và trễ truyền sóng
3.1.1. Giới thiệu
Ước lượng trễ truyền sóng và góc tới của tín hiệu cao tần cho hệ
thống thông tin vô tuyến tiên tiến, hệ thống định vị vô tuyến, hệ thống radar
đã và đang được các nhà khoa học trong và ngoài nước quan tâm nghiên
cứu [28], [65-67]. Việc khai thác kỹ thuật đa truy nhập phân chia theo
không gian SDMA luôn song hành với việc phát triển các kỹ thuật ước
lượng hướng sóng tới. Phần lớn các hệ thống đo đạc, ước lượng hướng
sóng tới đều dựa vào xử lý tín hiệu ở băng tần cơ sở của tín hiệu giải điều
chế [68] hoặc từ việc xác định trực tiếp pha của các tín hiệu tới [69]. Trong
các hệ thống này, sau khi có được thông tin về pha của tín hiệu từ đường
bao phức của tín hiệu thu được sau khi giải điều chế, một thuật toán có độ
phân giải cao sẽ được sử dụng cho việc ước lượng hướng sóng tới DOA và
trễ truyền sóng như thuật toán MUSIC, ESPRIT [66]. Trong trường hợp tín
hiệu tương quan, người ta thường sử dụng phương pháp phá vỡ tính tương
quan của tín hiệu trước khi sử dụng các giải thuật ước lượng hướng sóng
tới. Tuy nhiên, trong bài toán này luôn đòi hỏi số phần tử ăng ten trong dàn
lớn hơn số nguồn tín hiệu cần ước lượng và để có kết quả ước lượng chính
xác đòi hỏi một số lượng mẫu khá lớn. Phần này nghiên cứu và đề xuất một
phương pháp ước lượng đồng thời hướng sóng tới trong mặt phẳng phương
vị, tần số Doppler, thời gian trễ truyền sóng của tín hiệu cao tần không
tương quan và tương quan. Tham số về hướng sóng tới DOA được ước
lượng dựa vào phép đo sự lệch pha của các tín hiệu thu được của dàn ăng
ten đồng dạng tuyến tính bố trí trên một đường thẳng và sử dụng thuật toán
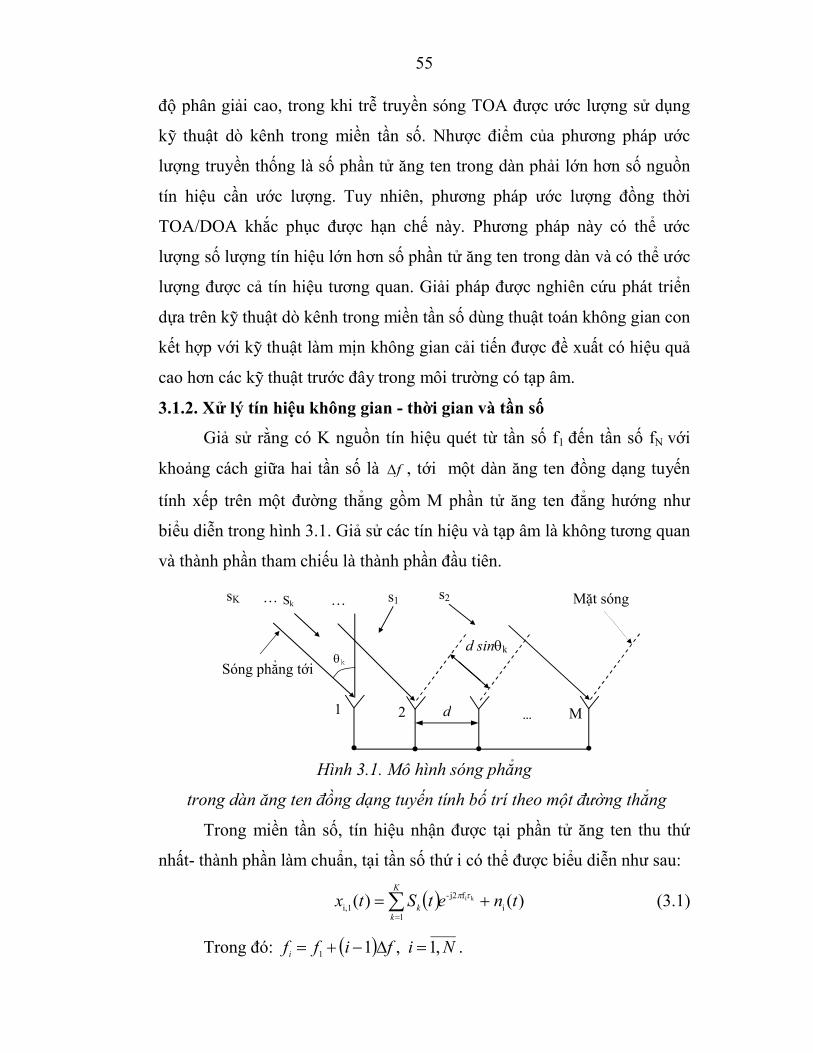
55
độ phân giải cao, trong khi trễ truyền sóng TOA được ước lượng sử dụng
kỹ thuật dò kênh trong miền tần số. Nhược điểm của phương pháp ước
lượng truyền thống là số phần tử ăng ten trong dàn phải lớn hơn số nguồn
tín hiệu cần ước lượng. Tuy nhiên, phương pháp ước lượng đồng thời
TOA/DOA khắc phục được hạn chế này. Phương pháp này có thể ước
lượng số lượng tín hiệu lớn hơn số phần tử ăng ten trong dàn và có thể ước
lượng được cả tín hiệu tương quan. Giải pháp được nghiên cứu phát triển
dựa trên kỹ thuật dò kênh trong miền tần số dùng thuật toán không gian con
kết hợp với kỹ thuật làm mịn không gian cải tiến được đề xuất có hiệu quả
cao hơn các kỹ thuật trước đây trong môi trường có tạp âm.
3.1.2. Xử lý tín hiệu không gian - thời gian và tần số
Giả sử rằng có K nguồn tín hiệu quét từ tần số f1 đến tần số fN với
khoảng cách giữa hai tần số là f , tới một dàn ăng ten đồng dạng tuyến
tính xếp trên một đường thẳng gồm M phần tử ăng ten đẳng hướng như
biểu diễn trong hình 3.1. Giả sử các tín hiệu và tạp âm là không tương quan
và thành phần tham chiếu là thành phần đầu tiên.
Hình 3.1. Mô hình sóng phẳng
trong dàn ăng ten đồng dạng tuyến tính bố trí theo một đường thẳng
Trong miền tần số, tín hiệu nhận được tại phần tử ăng ten thu thứ
nhất- thành phần làm chuẩn, tại tần số thứ i có thể được biểu diễn như sau:
)()( i
fj2-
1i,1
ki tnetStxK
kk
(3.1)
Trong đó: Nififfi ,1,11 .
d sink
d …
Sóng phẳng tới
Mặt sóng
1 2 M
k
Sks1 s2……sK

56
sk(t) là tín hiệu phát của nguồn thứ k ở tần số fi.
kτ là trễ truyền sóng (TOA- Time Of Arrival) của tín hiệu thứ k tới
phần tử ăng ten thu thứ nhất.
ni(t) là tạp âm trắng cộng tại máy thu ở tần số fi.
Vì trễ truyền sóng giữa hai phần từ ăng ten thu liên tiếp là bằng nhau,
do đó trễ truyền sóng từ phần tử ăng ten thu thứ nhất tới phần tử ăng ten thu
thứ m là:
Với m = 1, 2,…, M:
(3.2)
Trong đó:
v là vận tốc truyền sóng;
d là khoảng cách giữa hai phần tử ăng ten thu liên tiếp;
k là góc tới (trong mặt phẳng phương vị) của tín hiệu thứ k.
Do đó, tín hiệu thu được tại máy thu thứ m tại tần số fi có thể được biểu
diễn như sau:
(3.3)
Bằng việc đo các tín hiệu thu tại tất cả các tần số trong băng và cho
M phần tử thu, dữ liệu nhận được tại đầu ra của tất cả các phần tử thu có
thể biểu diễn dưới dạng ma trận như sau:
.x t A s t n t (3.4)
Với:
x(t) là véc tơ đầu ra 1xQ (Q=MxN) được đo bởi hệ thống:
1 2, ,...,T
Mx t x t x t x t , T kí hiệu phép chuyển vị.
v
d.sin1-m k
kDm
)()( i
fj2-fj2-
1mi,
kmDiki tneetStxK
kk

57
1, 2, , ,, ,..., ,...,m m m i m N mx t x t x t x t x t chứa N giá trị đầu ra ,i mx t
như trong biểu thức (3.3) tương ứng với N tần số nhận được tại đầu ra máy
thu thứ m trong hệ thống thu.
s(t) là một véc tơ của K tín hiệu tới:
1 2, ,..., ,...,T
k Ks t s t s t s t s t
n(t) là tạp âm, được biểu diễn bởi một véc tơ dạng cột Qx1.
A là một ma trận kích thước QxK chứa các “véc tơ lái- véc tơ chỉ
phương và véc tơ chỉ trễ” của tín hiệu đến thứ k của mảng ,k ka kích
thước 1xK:
1 1 2 2, , , ,..., , ,..., ,k k K KA a a a a
Trong đó: 1, , ,..., , ,..., ,T
k k k k m k k M k ka a a a
,m k ka là véc tơ “lái” của tín hiệu đến thứ k tại phần tử ăng ten thứ m.
Mỗi véc tơ “lái“ ,m k ka phụ thuộc vào N tần số như sau:
1, , ,, , ,..., , ,..., ,m k k m k k i m k k N m k ka a a a
Ở đây ,
, , i mj ki m k ka e và ,
sin2 1 2 1 k
i m ki
k i f d m
là độ lệch pha của tín hiệu đến thứ k giữa thành phần thứ m tại tần số thứ i
và thành phần tham chiếu tại tần số đầu tiên. kmi , chứa thông tin về độ
lệch pha giữa hai tần số liên tiếp trong băng và độ lệch pha giữa hai phần tử
ăng ten trong dàn.
Ma trận hiệp phương sai dữ liệu tương ứng trong biểu thức (3.4)
được cho bởi:
( ). ( ) . .H Hxx SS nnR E x t x t A R A Q
(3.5)
Với Qnn là ma trận hiệp phương sai tạp âm, Rss=E[s(t)sH(t)] là ma
trận hiệp phương sai của tín hiệu và H là toán tử Hermitian là một chuyển
vị và liên hợp phức.

58
Ước lượng R̂ của ma trận hiệp phương sai có dạng:
R̂ xx=1
1( ) ( )
sampleLH
ksample
X k X kL
(3.6)
Để ước lượng kết hợp các thông số hướng sóng tới DOA và thời gian
trễ, sử dụng thuật toán độ phân giải cao và phương pháp không gian con.
Phương pháp này có độ phân giải cao trong trường hợp không gian con tạp
âm và không gian con tín hiệu trực giao. Những không gian con được tìm
bằng cách tính toán các véc tơ riêng của ma trận hiệp phương sai xxR̂ . Các
véc tơ riêng liên quan đến K giá trị riêng mạnh nhất của xxR̂ tạo nên không
gian con tín hiệu ES và Q-K véc tơ riêng liên quan đến Q-N giá trị riêng
yếu nhất, với công suất tạp âm 2, tạo ra không gian con nhiễu EN. Ở [3]
cho thấy rằng véc tơ lái (, ) cũng có thể đại diện cho không gian con tín
hiệu. Thuật toán dựa trên việc phân loại tín hiệu đa đường chỉ ra đỉnh phổ
trong vùng lân cận của các giá trị thực bằng cách liên hệ không gian con
tạp âm với không gian con tín hiệu.
),(),(
1
aEEaP
H
NN
H (3.7)
Đối với các tín hiệu tương quan, cần phải sử dụng kỹ thuật tiền xử lý
như làm mịn không gian ba chiều (3D-SS) để phá vỡ sự tương quan của các
tín hiệu trước khi sử dụng giải thuật ước lượng [85]. Phương pháp làm mịn
không gian truyền thống như trung bình tịnh tiến và lùi được áp dụng trực
tiếp lên các véc tơ dữ liệu. Do đó, lỗi khi ước lượng có thể xuất hiện trong
môi trường có tạp âm. Kỹ thuật làm mịn không gian cải tiến phát triển cho
một ma trận dữ liệu của T mẫu với phương pháp phá vỡ sự tương quan của
các tín hiệu tới được áp dụng vào xxR̂ thay vì vào véc tơ dữ liệu x(t):
S
1uusubSS-XX R̂
1R̂
S (3.8)
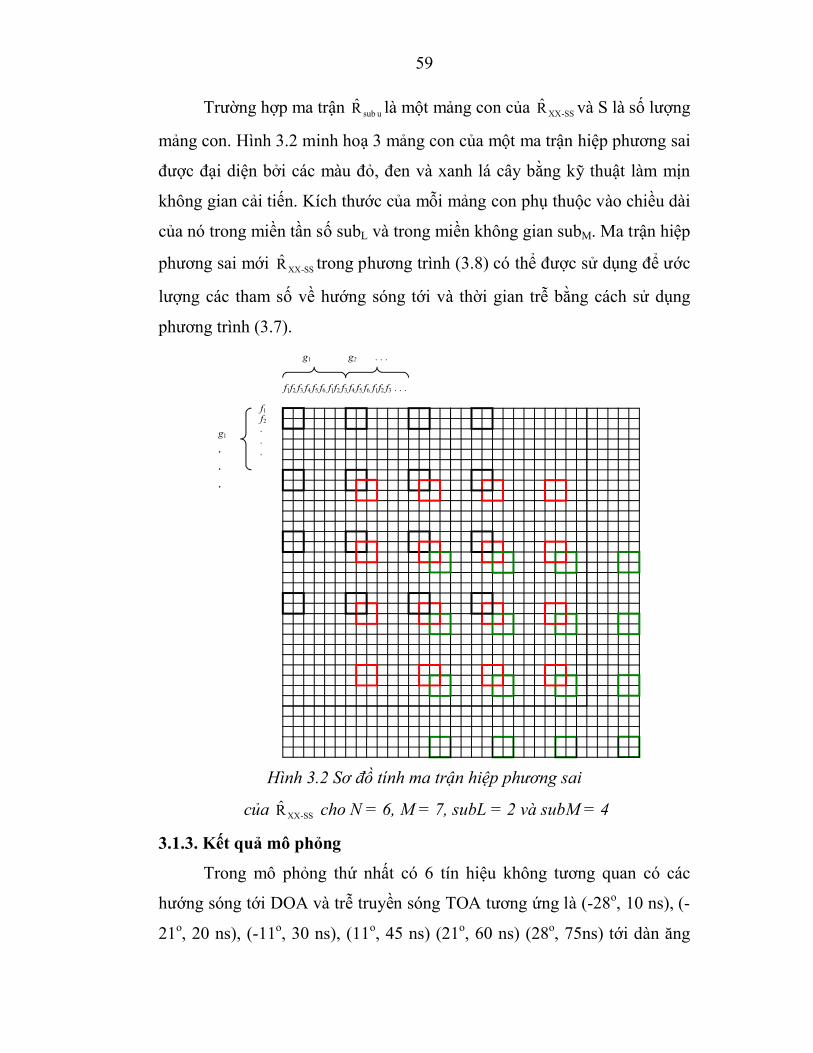
59
Trường hợp ma trận usubR̂ là một mảng con của SS-XXR̂ và S là số lượng
mảng con. Hình 3.2 minh hoạ 3 mảng con của một ma trận hiệp phương sai
được đại diện bởi các màu đỏ, đen và xanh lá cây bằng kỹ thuật làm mịn
không gian cải tiến. Kích thước của mỗi mảng con phụ thuộc vào chiều dài
của nó trong miền tần số subL và trong miền không gian subM. Ma trận hiệp
phương sai mới SS-XXR̂ trong phương trình (3.8) có thể được sử dụng để ước
lượng các tham số về hướng sóng tới và thời gian trễ bằng cách sử dụng
phương trình (3.7).
Hình 3.2 Sơ đồ tính ma trận hiệp phương sai
của SS-XXR̂ cho N = 6, M = 7, subL = 2 và subM = 4
3.1.3. Kết quả mô phỏng
Trong mô phỏng thứ nhất có 6 tín hiệu không tương quan có các
hướng sóng tới DOA và trễ truyền sóng TOA tương ứng là (-28o, 10 ns), (-
21o, 20 ns), (-11o, 30 ns), (11o, 45 ns) (21o, 60 ns) (28o, 75ns) tới dàn ăng
f1f2 f3 f4 f5 f6 f1f2 f3 f4 f5 f6 f1f2 f3 . . .
g1 g2 . . .
f1
f2
.
.
.
g1
.
.
.
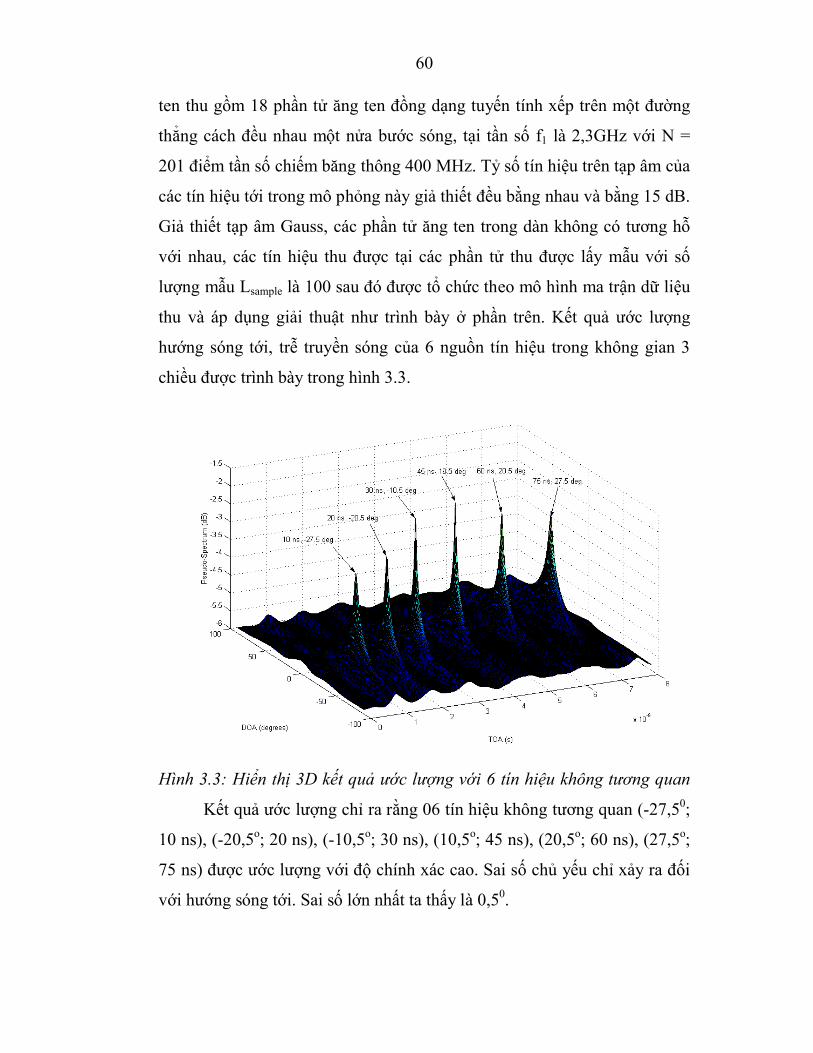
60
ten thu gồm 18 phần tử ăng ten đồng dạng tuyến tính xếp trên một đường
thẳng cách đều nhau một nửa bước sóng, tại tần số f1 là 2,3GHz với N =
201 điểm tần số chiếm băng thông 400 MHz. Tỷ số tín hiệu trên tạp âm của
các tín hiệu tới trong mô phỏng này giả thiết đều bằng nhau và bằng 15 dB.
Giả thiết tạp âm Gauss, các phần tử ăng ten trong dàn không có tương hỗ
với nhau, các tín hiệu thu được tại các phần tử thu được lấy mẫu với số
lượng mẫu Lsample là 100 sau đó được tổ chức theo mô hình ma trận dữ liệu
thu và áp dụng giải thuật như trình bày ở phần trên. Kết quả ước lượng
hướng sóng tới, trễ truyền sóng của 6 nguồn tín hiệu trong không gian 3
chiều được trình bày trong hình 3.3.
Hình 3.3: Hiển thị 3D kết quả ước lượng với 6 tín hiệu không tương quan
Kết quả ước lượng chỉ ra rằng 06 tín hiệu không tương quan (-27,50;
10 ns), (-20,5o; 20 ns), (-10,5o; 30 ns), (10,5o; 45 ns), (20,5o; 60 ns), (27,5o;
75 ns) được ước lượng với độ chính xác cao. Sai số chủ yếu chỉ xảy ra đối
với hướng sóng tới. Sai số lớn nhất ta thấy là 0,50.
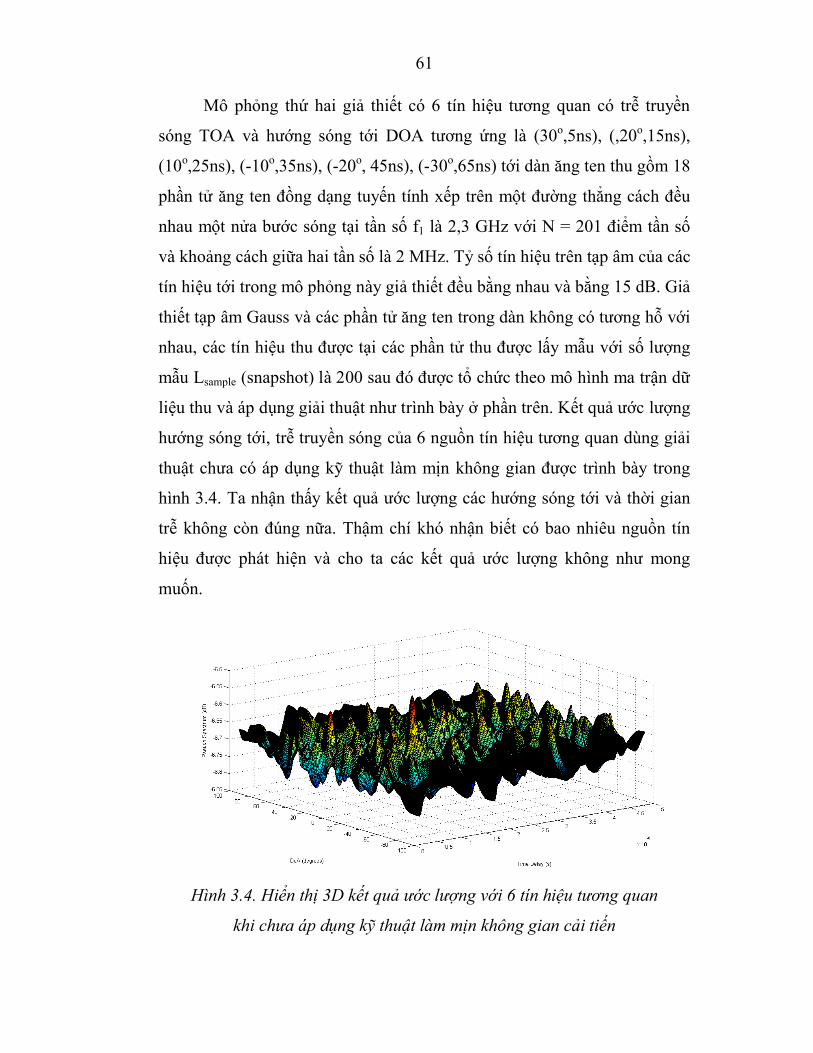
61
Mô phỏng thứ hai giả thiết có 6 tín hiệu tương quan có trễ truyền
sóng TOA và hướng sóng tới DOA tương ứng là (30o,5ns), (,20o,15ns),
(10o,25ns), (-10o,35ns), (-20o, 45ns), (-30o,65ns) tới dàn ăng ten thu gồm 18
phần tử ăng ten đồng dạng tuyến tính xếp trên một đường thẳng cách đều
nhau một nửa bước sóng tại tần số f1 là 2,3 GHz với N = 201 điểm tần số
và khoảng cách giữa hai tần số là 2 MHz. Tỷ số tín hiệu trên tạp âm của các
tín hiệu tới trong mô phỏng này giả thiết đều bằng nhau và bằng 15 dB. Giả
thiết tạp âm Gauss và các phần tử ăng ten trong dàn không có tương hỗ với
nhau, các tín hiệu thu được tại các phần tử thu được lấy mẫu với số lượng
mẫu Lsample (snapshot) là 200 sau đó được tổ chức theo mô hình ma trận dữ
liệu thu và áp dụng giải thuật như trình bày ở phần trên. Kết quả ước lượng
hướng sóng tới, trễ truyền sóng của 6 nguồn tín hiệu tương quan dùng giải
thuật chưa có áp dụng kỹ thuật làm mịn không gian được trình bày trong
hình 3.4. Ta nhận thấy kết quả ước lượng các hướng sóng tới và thời gian
trễ không còn đúng nữa. Thậm chí khó nhận biết có bao nhiêu nguồn tín
hiệu được phát hiện và cho ta các kết quả ước lượng không như mong
muốn.
Hình 3.4. Hiển thị 3D kết quả ước lượng với 6 tín hiệu tương quan
khi chưa áp dụng kỹ thuật làm mịn không gian cải tiến
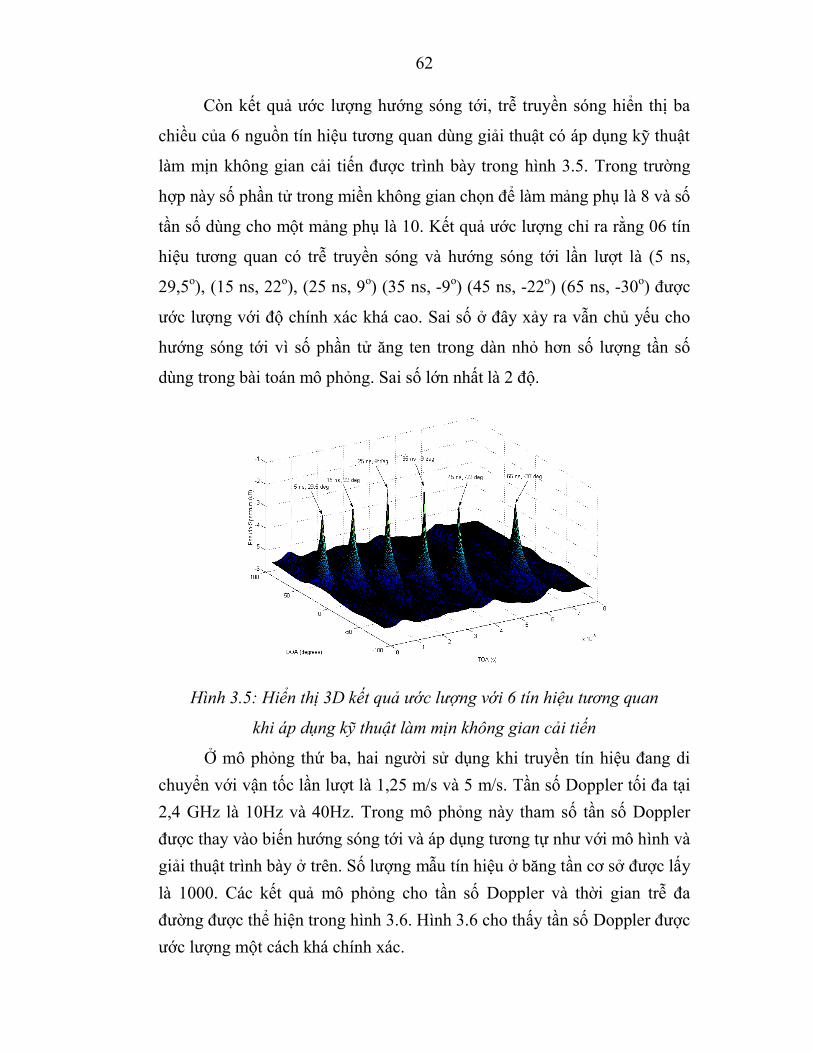
62
Còn kết quả ước lượng hướng sóng tới, trễ truyền sóng hiển thị ba
chiều của 6 nguồn tín hiệu tương quan dùng giải thuật có áp dụng kỹ thuật
làm mịn không gian cải tiến được trình bày trong hình 3.5. Trong trường
hợp này số phần tử trong miền không gian chọn để làm mảng phụ là 8 và số
tần số dùng cho một mảng phụ là 10. Kết quả ước lượng chỉ ra rằng 06 tín
hiệu tương quan có trễ truyền sóng và hướng sóng tới lần lượt là (5 ns,
29,5o), (15 ns, 22o), (25 ns, 9o) (35 ns, -9o) (45 ns, -22o) (65 ns, -30o) được
ước lượng với độ chính xác khá cao. Sai số ở đây xảy ra vẫn chủ yếu cho
hướng sóng tới vì số phần tử ăng ten trong dàn nhỏ hơn số lượng tần số
dùng trong bài toán mô phỏng. Sai số lớn nhất là 2 độ.
Hình 3.5: Hiển thị 3D kết quả ước lượng với 6 tín hiệu tương quan
khi áp dụng kỹ thuật làm mịn không gian cải tiến
Ở mô phỏng thứ ba, hai người sử dụng khi truyền tín hiệu đang di
chuyển với vận tốc lần lượt là 1,25 m/s và 5 m/s. Tần số Doppler tối đa tại
2,4 GHz là 10Hz và 40Hz. Trong mô phỏng này tham số tần số Doppler
được thay vào biến hướng sóng tới và áp dụng tương tự như với mô hình và
giải thuật trình bày ở trên. Số lượng mẫu tín hiệu ở băng tần cơ sở được lấy
là 1000. Các kết quả mô phỏng cho tần số Doppler và thời gian trễ đa
đường được thể hiện trong hình 3.6. Hình 3.6 cho thấy tần số Doppler được
ước lượng một cách khá chính xác.
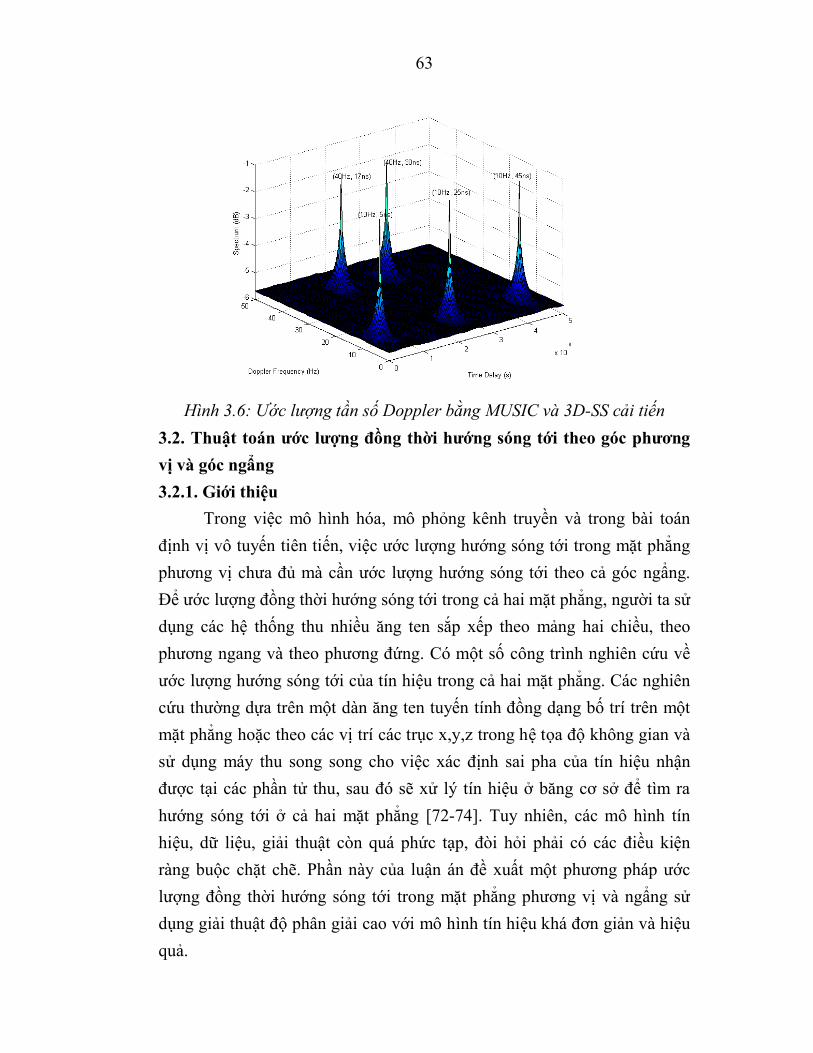
63
Hình 3.6: Ước lượng tần số Doppler bằng MUSIC và 3D-SS cải tiến
3.2. Thuật toán ước lượng đồng thời hướng sóng tới theo góc phương
vị và góc ngẩng
3.2.1. Giới thiệu
Trong việc mô hình hóa, mô phỏng kênh truyền và trong bài toán
định vị vô tuyến tiên tiến, việc ước lượng hướng sóng tới trong mặt phẳng
phương vị chưa đủ mà cần ước lượng hướng sóng tới theo cả góc ngẩng.
Để ước lượng đồng thời hướng sóng tới trong cả hai mặt phẳng, người ta sử
dụng các hệ thống thu nhiều ăng ten sắp xếp theo mảng hai chiều, theo
phương ngang và theo phương đứng. Có một số công trình nghiên cứu về
ước lượng hướng sóng tới của tín hiệu trong cả hai mặt phẳng. Các nghiên
cứu thường dựa trên một dàn ăng ten tuyến tính đồng dạng bố trí trên một
mặt phẳng hoặc theo các vị trí các trục x,y,z trong hệ tọa độ không gian và
sử dụng máy thu song song cho việc xác định sai pha của tín hiệu nhận
được tại các phần tử thu, sau đó sẽ xử lý tín hiệu ở băng cơ sở để tìm ra
hướng sóng tới ở cả hai mặt phẳng [72-74]. Tuy nhiên, các mô hình tín
hiệu, dữ liệu, giải thuật còn quá phức tạp, đòi hỏi phải có các điều kiện
ràng buộc chặt chẽ. Phần này của luận án đề xuất một phương pháp ước
lượng đồng thời hướng sóng tới trong mặt phẳng phương vị và ngẩng sử
dụng giải thuật độ phân giải cao với mô hình tín hiệu khá đơn giản và hiệu
quả.
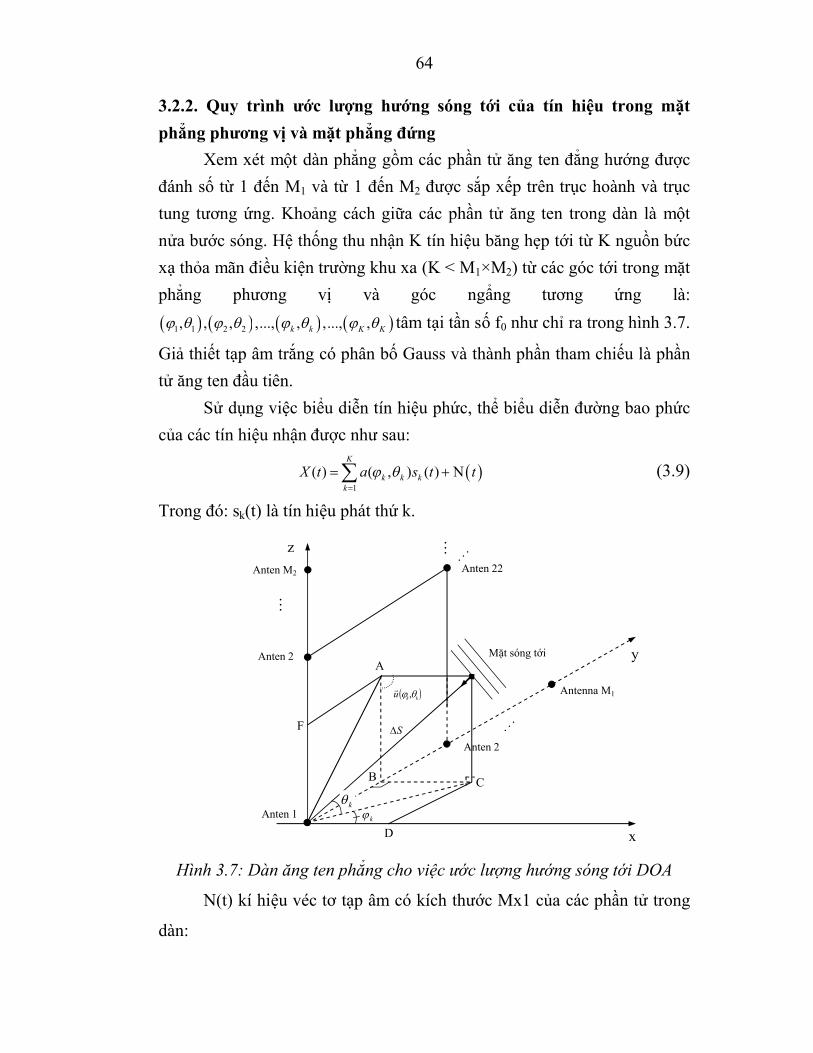
64
3.2.2. Quy trình ước lượng hướng sóng tới của tín hiệu trong mặt
phẳng phương vị và mặt phẳng đứng
Xem xét một dàn phẳng gồm các phần tử ăng ten đẳng hướng được
đánh số từ 1 đến M1 và từ 1 đến M2 được sắp xếp trên trục hoành và trục
tung tương ứng. Khoảng cách giữa các phần tử ăng ten trong dàn là một
nửa bước sóng. Hệ thống thu nhận K tín hiệu băng hẹp tới từ K nguồn bức
xạ thỏa mãn điều kiện trường khu xa (K < M1×M2) từ các góc tới trong mặt
phẳng phương vị và góc ngẩng tương ứng là:
1 1 2 2, , , ,..., , ,..., ,k k K K tâm tại tần số f0 như chỉ ra trong hình 3.7.
Giả thiết tạp âm trắng có phân bố Gauss và thành phần tham chiếu là phần
tử ăng ten đầu tiên.
Sử dụng việc biểu diễn tín hiệu phức, thể biểu diễn đường bao phức
của các tín hiệu nhận được như sau:
1
( ) ( , ) ( )K
k k kk
X t a s t t
(3.9)
Trong đó: sk(t) là tín hiệu phát thứ k.
Hình 3.7: Dàn ăng ten phẳng cho việc ước lượng hướng sóng tới DOA
N(t) kí hiệu véc tơ tạp âm có kích thước Mx1 của các phần tử trong
dàn:
x
y
z
Anten 1
Anten 2
Anten 2
Anten 22
C
D
A
F
B
S
kk
Mặt sóng tới
Anten M2
Antenna M1 kku ,
65
1 2( ) ( ), ( ),..., ( ),..., ( )T
m MN t n t n t n t n t
T kí hiệu phép chuyển vị
( , )k ka là véc tơ chỉ phương của tín hiệu thứ k. Véc tơ chỉ phương
này chứa thông tin về sự lệch pha của tín hiệu đo được tại hai phần tử ăng
ten liên tiếp trong dàn. Sự lệch pha này đến từ khoảng cách S chiếu
xuống mặt phẳng xOy như chỉ ra trong hình. Căn cứ vào biểu diễn hình
học, có thể dễ dàng thấy được véc tơ chỉ phương được biểu diễn như sau:
1 22 2
os .sin sin 1 os .sin 1 sin( , ) 1 ...
k k k k k k
Tj d c j d M c M
k ka e e
Với d là khoảng cách giữa hai phần tử ăng ten liên tiếp trong dàn và
là bước sóng làm việc. Viết lại biểu thức (3.9) theo dạng ma trận và
trong miền thời gian rời rạc, ta được:
, .X n A S n N n (3.10)
Với 1 1 2 2, , , , ,..., , ,..., ,k k K KA a a a a là ma trận với
kích thước M K của các véc tơ chỉ phương theo trong hai mặt phẳng.
1 2, ,..., ,...,T
k KS n s n s n s n s n là véc tơ cột của các tín hiệu có
kích thước 1K .
Ma trận hiệp phương sai đối với véc tơ dữ liệu X(n) có thể được viết
như sau:
2URH Hxx ss oR E X n X n U I (3.11)
Với Rxx là ma trận hiệp phương sai của véc tơ tín hiệu X(n), 2o là
công suất tạp âm tại mỗi thành phần ăng ten và I là ma trận đơn vị có kích
thước KxK.
Từ ma trận tương quan Rxx thu được, sử dụng phương pháp có độ
phân giải cao để ước lượng thông số DOA của tín hiệu. Thuật toán này đòi
hỏi một số lượng phần tử của ăng ten lớn hơn số lượng tín hiệu và các tín
hiệu không tương quan với nhau. Phương pháp có độ phân giải cao này giả
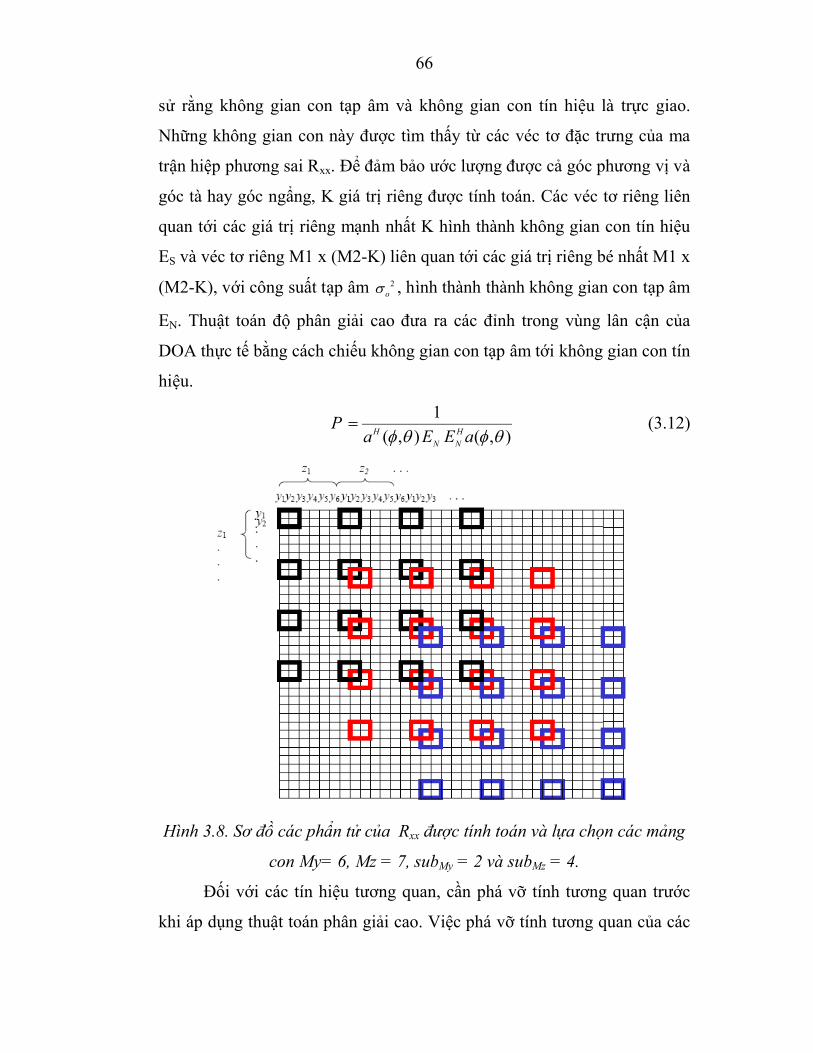
66
sử rằng không gian con tạp âm và không gian con tín hiệu là trực giao.
Những không gian con này được tìm thấy từ các véc tơ đặc trưng của ma
trận hiệp phương sai Rxx. Để đảm bảo ước lượng được cả góc phương vị và
góc tà hay góc ngẩng, K giá trị riêng được tính toán. Các véc tơ riêng liên
quan tới các giá trị riêng mạnh nhất K hình thành không gian con tín hiệu
ES và véc tơ riêng M1 x (M2-K) liên quan tới các giá trị riêng bé nhất M1 x
(M2-K), với công suất tạp âm 2o , hình thành thành không gian con tạp âm
EN. Thuật toán độ phân giải cao đưa ra các đỉnh trong vùng lân cận của
DOA thực tế bằng cách chiếu không gian con tạp âm tới không gian con tín
hiệu.
),(),(
1
aEEaP
H
NN
H (3.12)
Hình 3.8. Sơ đồ các phẩn tử của Rxx được tính toán và lựa chọn các mảng
con My= 6, Mz = 7, subMy = 2 và subMz = 4.
Đối với các tín hiệu tương quan, cần phá vỡ tính tương quan trước
khi áp dụng thuật toán phân giải cao. Việc phá vỡ tính tương quan của các
67
tín hiệu dùng kỹ thuật làm mịn không gian cải tiến được thực hiện trên ma
trận hiệp phương sai Rxx [75].
Hình 3.8 minh họa lựa chọn mảng con từ biểu đồ của Rxx, mỗi ô
vuông nhỏ đại diện cho một phần tử của Rxx. Các mảng con là các ma trận
vuông tạo thành từ các phần tử được kết hợp theo chiều dài trong miền Y
(subMy) và miền Z (subMz).
Ma trận hiệp phương sai tổng được tính từ các ma trận hiệp phương
sai của các mảng phụ.
S
1iisubXX_SS R
1R
S (3.13)
3.2.3. Kết quả mô phỏng
Để kiểm tra tính chính xác của ước lượng và tính năng của thuật
toán, đã tiến hành mô phỏng sử dụng Matlab. Mô phỏng được tiến hành
cho 1 nguồn tín hiệu và nhiều nguồn tín hiệu. Trước hết mô phỏng cho một
nguồn tín hiệu có hướng sóng tới theo góc phương vị và góc ngẩng là
(45°,35°), dùng dàn ăng ten phẳng có bốn phần tử, hai phần tử sắp xếp cách
đều nhau một nửa bước sóng tại tần số 2,4 GHz trong mặt phẳng phương vị
và hai phần tử trong mặt phẳng đứng. Trong mô phỏng này các tín hiệu ở
băng tần cơ sở sau các máy thu được lấy mẫu rời rạc với số mẫu là 100, tỷ
số tín hiệu trên tạp âm là 25 dB. Các dữ liệu sau mỗi máy thu được lưu trữ
và tổ chức thành các véc tơ dữ liệu X(n), sau đó tiến hành xử lý để ước
lượng hướng sóng tới như mô hình trình bày ở trên. Kết quả ước lượng
hướng sóng tới được trình bày trong không gian ba chiều như trong hình
3.9. Ta thấy rằng một tín hiệu với góc tới (45°, 35°) được tìm thấy. Nhận
thấy rằng với một nguồn tín hiệu tới, việc ước lượng góc tới có độ chính
xác rất cao.
Kịch bản mô phỏng tiếp theo cho 3 nguồn tín hiệu không tương quan
có các góc phương vị và các góc ngẩng tương ứng là (-38°, 20°), (0°, 38°),
(38°, 58°) tới hệ thống dàn ăng ten thu gồm 25 phần tử, 5 phần tử sắp xếp
cách đều nhau một nửa bước sóng tại tần số trung tâm 2,4 GHz trong mặt
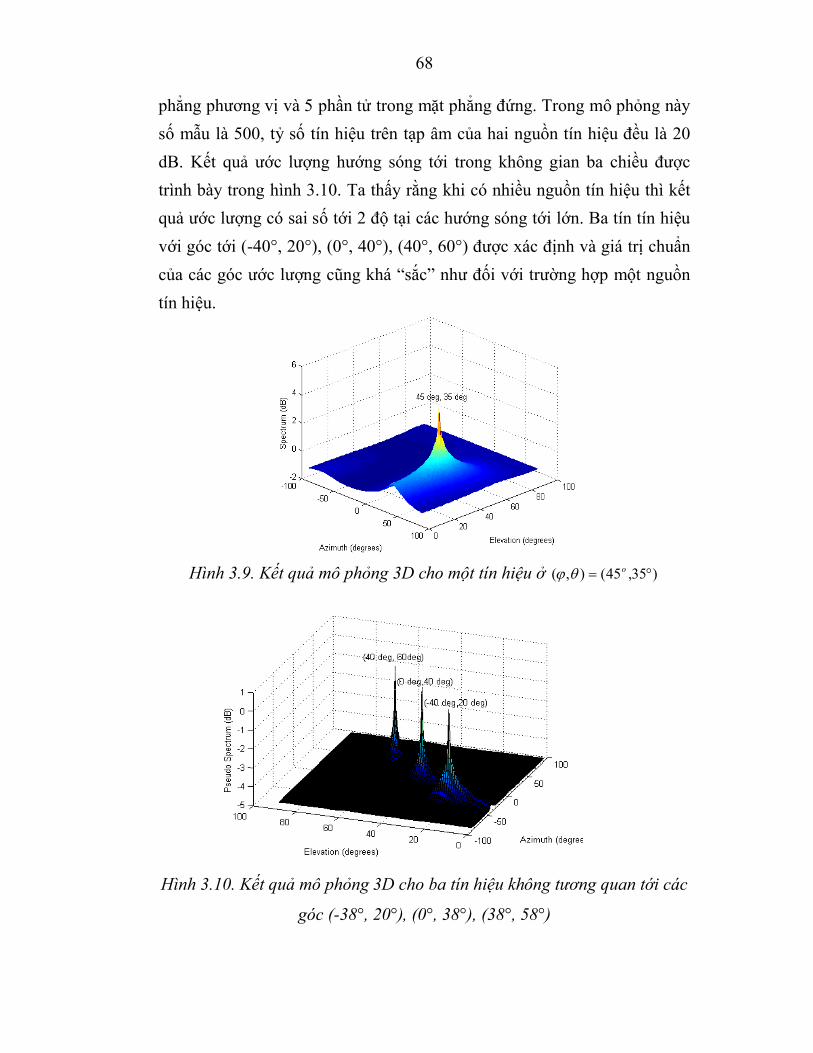
68
phẳng phương vị và 5 phần tử trong mặt phẳng đứng. Trong mô phỏng này
số mẫu là 500, tỷ số tín hiệu trên tạp âm của hai nguồn tín hiệu đều là 20
dB. Kết quả ước lượng hướng sóng tới trong không gian ba chiều được
trình bày trong hình 3.10. Ta thấy rằng khi có nhiều nguồn tín hiệu thì kết
quả ước lượng có sai số tới 2 độ tại các hướng sóng tới lớn. Ba tín tín hiệu
với góc tới (-40°, 20°), (0°, 40°), (40°, 60°) được xác định và giá trị chuẩn
của các góc ước lượng cũng khá “sắc” như đối với trường hợp một nguồn
tín hiệu.
Hình 3.9. Kết quả mô phỏng 3D cho một tín hiệu ở )35,45(),( o
Hình 3.10. Kết quả mô phỏng 3D cho ba tín hiệu không tương quan tới các
góc (-38°, 20°), (0°, 38°), (38°, 58°)
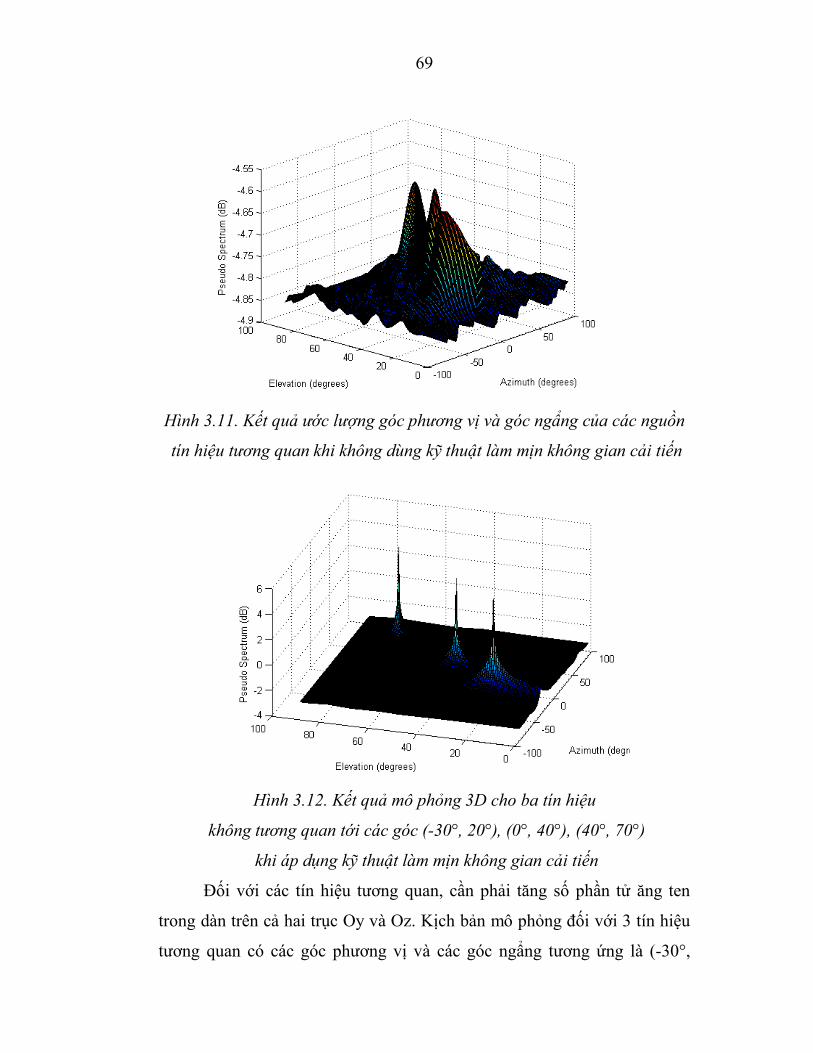
69
Hình 3.11. Kết quả ước lượng góc phương vị và góc ngẩng của các nguồn
tín hiệu tương quan khi không dùng kỹ thuật làm mịn không gian cải tiến
Hình 3.12. Kết quả mô phỏng 3D cho ba tín hiệu
không tương quan tới các góc (-30°, 20°), (0°, 40°), (40°, 70°)
khi áp dụng kỹ thuật làm mịn không gian cải tiến
Đối với các tín hiệu tương quan, cần phải tăng số phần tử ăng ten
trong dàn trên cả hai trục Oy và Oz. Kịch bản mô phỏng đối với 3 tín hiệu
tương quan có các góc phương vị và các góc ngẩng tương ứng là (-30°,
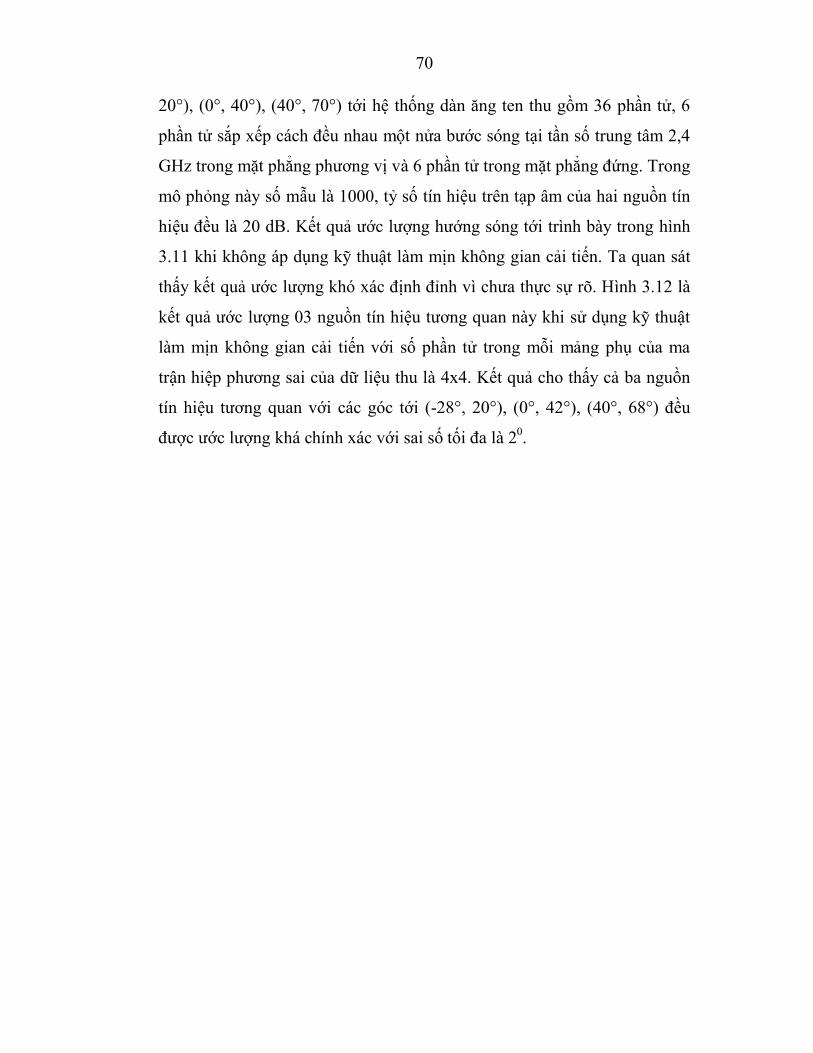
70
20°), (0°, 40°), (40°, 70°) tới hệ thống dàn ăng ten thu gồm 36 phần tử, 6
phần tử sắp xếp cách đều nhau một nửa bước sóng tại tần số trung tâm 2,4
GHz trong mặt phẳng phương vị và 6 phần tử trong mặt phẳng đứng. Trong
mô phỏng này số mẫu là 1000, tỷ số tín hiệu trên tạp âm của hai nguồn tín
hiệu đều là 20 dB. Kết quả ước lượng hướng sóng tới trình bày trong hình
3.11 khi không áp dụng kỹ thuật làm mịn không gian cải tiến. Ta quan sát
thấy kết quả ước lượng khó xác định đỉnh vì chưa thực sự rõ. Hình 3.12 là
kết quả ước lượng 03 nguồn tín hiệu tương quan này khi sử dụng kỹ thuật
làm mịn không gian cải tiến với số phần tử trong mỗi mảng phụ của ma
trận hiệp phương sai của dữ liệu thu là 4x4. Kết quả cho thấy cả ba nguồn
tín hiệu tương quan với các góc tới (-28°, 20°), (0°, 42°), (40°, 68°) đều
được ước lượng khá chính xác với sai số tối đa là 20.
71
Kết luận chương 3
Trong các hệ thống thông tin và định vị vô tuyến, số lượng các phần
tử ăng ten tại các thiết bị đầu cuối, tại các trạm thu phát thường không thể
quá lớn để đảm bảo tính khả thi về giá thành cũng như kích thước của các
thiết bị đầu cuối. Ngoài ra, hệ thống đòi hỏi nhiều tham số của tín hiệu như
hướng sóng tới, trễ truyền sóng, tần số Doppler… Hay nói cách khác hệ
thống cần biết các tham số của tín hiệu trong cả ba miền không gian, thời
gian và tần số. Trong chương này đã đề xuất, cải tiến các phương pháp,
thuật toán ước lượng đồng thời hai tham số của tín hiệu cho hệ thống thông
tin và định vị vô tuyến tiên tiến. Nội dung tập trung vào tham số không
gian là hướng sóng tới trong cả mặt phẳng phương vị và góc tà, thời gian
tới của tín hiệu hay trễ truyền sóng của tín hiệu, dịch tần số Doppler của tín
hiệu. Các thuật toán độ phân giải cao dựa trên không gian con, mô hình dữ
liệu đề xuất không chỉ áp dụng cho các nguồn tín hiệu không tương quan
mà còn cho phép áp dụng được đối với các tín hiệu tương quan.
Đối với tín hiệu tương quan, chương này đã đề xuất sử dụng và cải
tiễn kỹ thuật làm mịn không gian cải tiến dựa trên ma trận hiệp phương sai
của dữ liệu thu được để phá vỡ tính tương quan của tín hiệu trước khi áp
dụng giải thuật có độ phân giải cao. Đối với thuật toán ước lượng đồng thời
hướng sóng tới và trễ truyền sóng, có thể ước lượng được số nguồn tín hiệu
lớn hơn số phần tử ăng ten trong dàn do sử dụng thêm miền tần số. Các giải
thuật, kỹ thuật, mô hình đề xuất được thực hiện mô phỏng bằng Matlab để
kiểm chứng và đã thu được các kết quả khả quan. Các tham số về không
gian, thời gian và tần số Doppler của tín hiệu được ước lượng khá chính
xác.
72
CHƯƠNG 4:
GIẢI PHÁP CẢM NHẬN PHỔ TRONG
HỆ THỐNG THÔNG TIN VÔ TUYẾN ĐA ĂNG TEN
Trong hệ thống thông tin, định vị vô tuyến sử dụng nhiều ăng ten,
bên cạnh việc ước lượng các tham số thời gian, không gian, việc ước lượng
và cảm nhận các tham số về tần số một cách linh hoạt, cảm nhận về môi
trường và tự động điều chỉnh các thông số cho phù hợp với môi trường
nhằm nâng cao hiệu suất sử dụng tài nguyên, phổ tần là giải pháp cho vấn
đề khan hiếm phổ hiện nay thay vì giải pháp cấp phát phổ cố định hiện tại
chưa đạt được hiệu suất sử dụng phổ mong muốn. Vô tuyến nhận thức CR
(Cognitive Radio) là một công nghệ vô tuyến có khả năng cảm nhận về môi
trường và tự động điều chỉnh các thông số cho phù hợp với môi trường. Hệ
thống tận dụng nguồn tài nguyên phổ bằng mô hình sử dụng phổ động thay
vì kỹ thuật cấp phát phổ cố định như trước đây. Để thực hiện được kỹ thuật
này, vô tuyến nhận thức phải xác định được tín hiệu người dùng sơ cấp có
tồn tại hay không bằng cách cảm nhận môi trường phổ. Chương 4 đề xuất
một kỹ thuật cảm nhận phổ không yêu cầu thông tin trạng thái kênh truyền
(CSI) cũng như các thông tin chính xác về tín hiệu và nhiễu. Tín hiệu người
dùng sơ cấp và nhiễu được giả thiết là biến ngẫu nhiên Gaus phức, có phân
bố độc lập và đồng nhất. Chất lượng của kỹ thuật đề xuất được so sánh với
một phương pháp khác cũng không yêu cầu thông tin CSI là kỹ thuật sử
dụng trọng số lượng tử và một phương thức truyền thống sử dụng kỹ thuật
kết hợp tăng ích đều (EGC).
Chương này cũng đề xuất một kỹ thuật kết hợp giữa kỹ thuật xử lý
song song và luật OR để thực hiện cảm nhận phổ. Đồng thời đề xuất mô
hình cảm nhận phổ sử dụng kỹ thuật xử lý song song và một bộ tạo biến
ngẫu nhiên. Đánh giá chất lượng của hệ thống đề xuất bằng cách thay đổi
tỷ số SNR trong lần mô phỏng đầu tiên, thay đổi số mẫu trong hai lần mô
73
phỏng tiếp theo. Tăng tỷ số SNR cũng như tăng số lượng mẫu làm cho hệ
thống hoạt động tốt hơn.
4.1. Đề xuất kỹ thuật cảm nhận phổ dựa trên các tham số ước lượng
4.1.1. Giới thiệu
Mạng vô tuyến nhận thức [23, 76, 77] là mạng dử dụng công nghệ có
khả năng giải quyết vấn đề khan hiếm phổ tần số. Một trong những chức
năng cơ bản của vô tuyến nhận thức là khả năng cảm nhận phổ để tận dụng
tài nguyên phổ tần số. Người dùng thứ cấp không có giấy phép sử dụng
phổ tần có thể sử dụng dải phổ đã được cấp cho người dùng sơ cấp trong
trường hợp người dùng đó không sử dụng. Với điều kiện người dùng thứ
cấp không được gây nhiễu đến người dùng sơ cấp. Để giải quyết vấn đề
này, một số phương pháp đã được để xuất. Trong [78], hiệu suất của quá
trình cảm nhận phổ được xem xét với đơn ăng ten và đa ăng ten. Hai
phương pháp, MRC và EGC được sử dụng để xử lý tín hiệu tại các ăng ten
thu dùng đa ăng ten.
Vấn đề chính của cảm nhận phổ là xác định sự xuất hiện của người
dùng sơ cấp một cách chính xác dựa vào tỷ số SNR thấp trên kênh truyền
có pha đinh đa đường. Sử dụng nhiều bộ thu [24, 78, 79] một kỹ thuật hiệu
quả để xử lý vấn đề kênh truyền có pha đinh đa đường. Vấn đề cần quan
tâm ở đây là bộ thu phân cực yêu cầu thông tin CSI để kết hợp và chọn tín
hiệu thu. Điều này không thực tế vì không phải lúc nào cũng biết trước
được thông tin trạng thái kênh truyền. Gần đây, nghiên cứu trong [24] đã
đề xuất một phương pháp cảm nhận phổ sử dụng trọng số lượng tử và
không phụ thuộc vào thông tin về CSI. Tuy nhiên, hệ thống sử dụng trọng
số lượng tử yêu cầu tính toán phức tạp và không mang lại kết quả mong
muốn như các hệ thống trước đây sử dụng mô hình kết hợp phân cực.
Chương này chúng tôi sẽ phát triển một kỹ thuật đơn giản để xử lý tín hiệu
thu với đa ăng ten mà không sử dụng thông tin CSI. Trong mô phỏng, chất
lượng của hệ thống đề xuất được so sánh với hệ thống sử dụng trọng số
lượng tử và hệ thống sử dụng mô hình EGC. Trong hầu hết các nghiên cứu
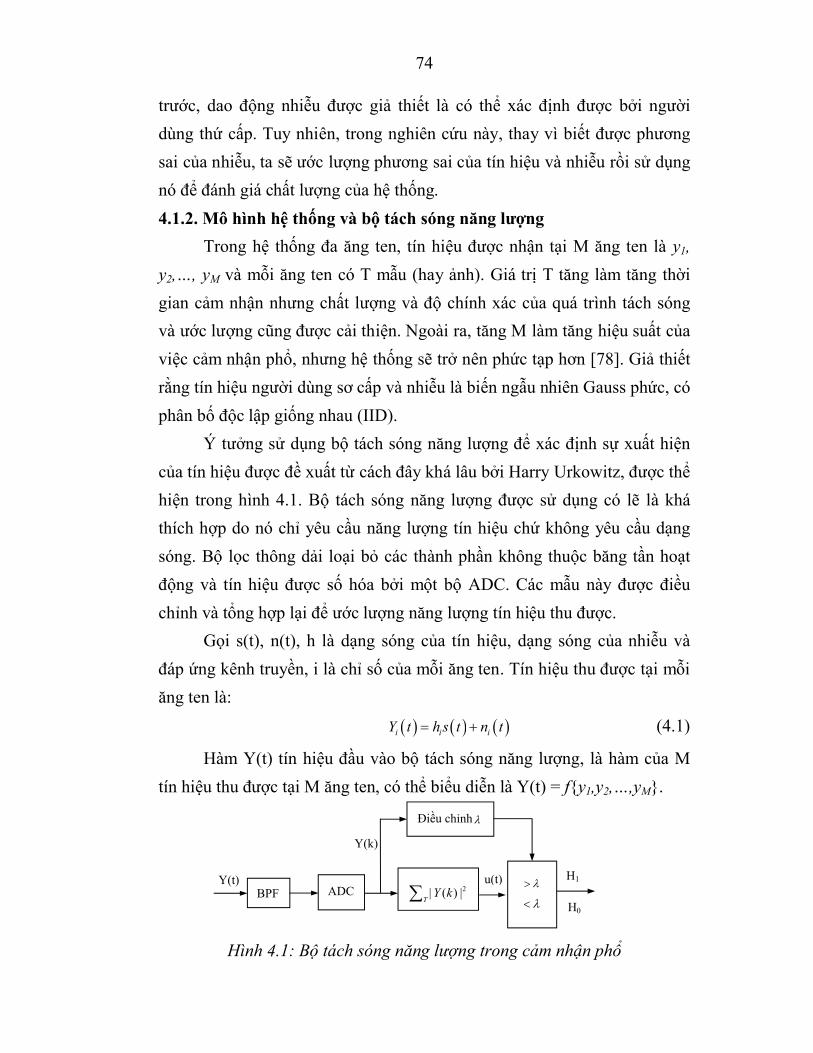
74
trước, dao động nhiễu được giả thiết là có thể xác định được bởi người
dùng thứ cấp. Tuy nhiên, trong nghiên cứu này, thay vì biết được phương
sai của nhiễu, ta sẽ ước lượng phương sai của tín hiệu và nhiễu rồi sử dụng
nó để đánh giá chất lượng của hệ thống.
4.1.2. Mô hình hệ thống và bộ tách sóng năng lượng
Trong hệ thống đa ăng ten, tín hiệu được nhận tại M ăng ten là y1,
y2,…, yM và mỗi ăng ten có T mẫu (hay ảnh). Giá trị T tăng làm tăng thời
gian cảm nhận nhưng chất lượng và độ chính xác của quá trình tách sóng
và ước lượng cũng được cải thiện. Ngoài ra, tăng M làm tăng hiệu suất của
việc cảm nhận phổ, nhưng hệ thống sẽ trở nên phức tạp hơn [78]. Giả thiết
rằng tín hiệu người dùng sơ cấp và nhiễu là biến ngẫu nhiên Gauss phức, có
phân bố độc lập giống nhau (IID).
Ý tưởng sử dụng bộ tách sóng năng lượng để xác định sự xuất hiện
của tín hiệu được đề xuất từ cách đây khá lâu bởi Harry Urkowitz, được thể
hiện trong hình 4.1. Bộ tách sóng năng lượng được sử dụng có lẽ là khá
thích hợp do nó chỉ yêu cầu năng lượng tín hiệu chứ không yêu cầu dạng
sóng. Bộ lọc thông dải loại bỏ các thành phần không thuộc băng tần hoạt
động và tín hiệu được số hóa bởi một bộ ADC. Các mẫu này được điều
chỉnh và tổng hợp lại để ước lượng năng lượng tín hiệu thu được.
Gọi s(t), n(t), h là dạng sóng của tín hiệu, dạng sóng của nhiễu và
đáp ứng kênh truyền, i là chỉ số của mỗi ăng ten. Tín hiệu thu được tại mỗi
ăng ten là:
i i iY t h s t n t (4.1)
Hàm Y(t) tín hiệu đầu vào bộ tách sóng năng lượng, là hàm của M
tín hiệu thu được tại M ăng ten, có thể biểu diễn là Y(t) = f{y1,y2,…,yM}.
Hình 4.1: Bộ tách sóng năng lượng trong cảm nhận phổ
BPF ADC T
kY 2|)(|Y(t) u(t) H1
Y(k)
H0
Điều chỉnh

75
Đối với các mô hình khác nhau như kết hợp tỷ lệ tối đa, kết hợp lựa
chọn, kết hợp độ lợi cân bằng và kết hợp sử dụng trọng số lượng tử trong
[24] nhận được các giá trị khác nhau của Y(t) là đầu vào của bộ tách sóng
năng lượng.
Tín hiệu thu được có thể được biểu diễn như sau:
tNtS
tNtY Tín hiệu ở mức có (H1) hoặc không (H0) (4.2)
Các giá trị kiểm tra được tính như sau:
2kYtu T (4.3)
Sau đó u(t) được so sánh với giá trị ngưỡng để quyết định sự tồn tại
của tín hiệu hay không. Có hai cách để xác định sự tồn tại và hoạt động của
hệ thống dựa trên các tham số sau:
12
1 PrPr HobHtuobP ND (4.4)
DMD PP 1 (4.5)
02
0 PrPr HobHtuobP NFA (4.6)
PD, PMD và PFA tương ứng là xác suất xác định đúng, xác suất xác định
nhầm và xác suất báo hiệu nhầm. PFA cho biết xác suất tín hiệu không tồn
tại nhưng hệ thống lại báo là có tín hiệu người dùng sơ cấp. PMD biểu thị
xác suất xuất hiện tín hiệu người dùng sơ cấp nhưng hệ thống lại báo là
không có. Tùy thuộc vào các thông số và yêu cầu của mạng vô tuyến nhận
thức mà có thể lựa chọn các tham số này một cách hợp lý. Chẳng hạn, có
thể cố định PMD, tính toán giá trị ngưỡng và cuối cùng tính toán PFA hoặc
ngược lại. Khi một trong hai tham số (PFA hoặc PMD) cố định, cần xác định
hàm mật độ xác suất (PDF) của giá trị kiểm tra u(t) và sau đó tính toán giá
trị ngưỡng và các tham số còn lại.
Để xác định xác suất xác định nhầm và xác suất báo hiệu nhầm, cũng
cần tìm ra hàm mật độ xác suất PDF của giá trị kiểm tra u(t). Trong cả hai
giả thiết H0 và H1, PDF của giá trị kiểm tra có phân bố Chi-square tập trung

76
và không tập trung [80]. Theo định lý giới hạn trung tâm, trong trường hợp
T đủ lớn, có thể coi u(t) tuân theo phân bố chuẩn như sau:
22222
22
2,
2,~
snsn
nn
TTNormal
TTNormaltu
(4.7)
Ngoài ra, trong [24, 78, 81], giá trị ngưỡng được lấy từ công thức
trong trường hợp xác suất báo hiệu nhầm và phương sai của nhiễu 2n đã
biết trước:
2
11
2
T
PQ FAnFA (4.8)
Hoặc:
2
11
2
T
PQ DtD (4.9)
trong trường hợp đã biết xác suất PD và giá trị phương sai của tín hiệu cộng
với nhiễu 222snt .
Trên thực tế, rất khó xác định chính xác phương sai của tín hiệu và
tín hiệu cộng với nhiễu. Do đó, trong luận án dựa vào các mẫu tín hiệu tại
đầu thu, sẽ ước lượng giá trị kỳ vọng và phương sai của tín hiệu và nhiễu,
tính toán giá trị ngưỡng và bậc tự do của các tham số tập trung và không
tập trung trong phân bố Chi- square.
4.1.3. Máy thu vô tuyến nhận thức
Xem xét ba cách kết hợp tín hiệu tại bộ thu đa ăng ten. Phương pháp
đầu tiên là mô hình EGC. Tín hiệu thu được tại mỗi ăng ten tuân theo công
thức (4.1) trong đó hi là đáp ứng kênh truyền trong kênh tuân theo phân bố
Rayleigh:
hij
i ih h e (4.10)
Tín hiệu tại đầu vào bộ tách sóng năng lượng có dạng:

77
1 1
1 1hi
M Mi
i iji i
y tY h s t n t
M Me
(4.11)
ihj
ii
e
tntn ~ (4.12)
Trong mô hình EGC, không cần phải biết sự biến thiên theo thời gian
của SNR như đối với mô hình kết hợp tỷ lệ tối đa MRC, điều đó rất khó
xác định. Tuy nhiên, vẫn cần tham số ihje
của đáp ứng kênh truyền để kết
hợp tín hiệu thu được Y. Có thể nói rằng ihje
là trọng số tối ưu để kết hợp
các tín hiệu tại mỗi nhánh. Tuy nhiên, trong thực tế tìm được tham số này
khá khó khăn. Trong [24], một phương pháp sử dụng trọng số lượng tử
được đề xuất, xét phương pháp này trong trường hợp sử dụng 4 ăng ten và
2 trọng số lượng tử cho mỗi ăng ten như trong hình 4.2. Chọn ăng ten đầu
tiên là ăng ten tham chiếu và không nhân với trọng số lượng tử. Từ ăng ten
thứ hai đến ăng ten thứ tư, mỗi ăng ten có hai trọng số lượng tử. Kết quả có
thể tích hợp 8 nhánh tín hiệu như công thức dưới đây:
43322114
1ywywywyY (4.13)
wi (i = 1,2,3) có hai giá trị có thể xảy ra (wi1,wi2). Trong trường hợp tổng
quát, giả sử |wi| = 1, khi đó ta có 8 giá trị sau:
43132121111 4
1ywywywyY
43232121112 4
1ywywywyY
43132221113 4
1ywywywyY
43232221114 4
1ywywywyY
43132121215 4
1ywywywyY
43232121216 4
1ywywywyY
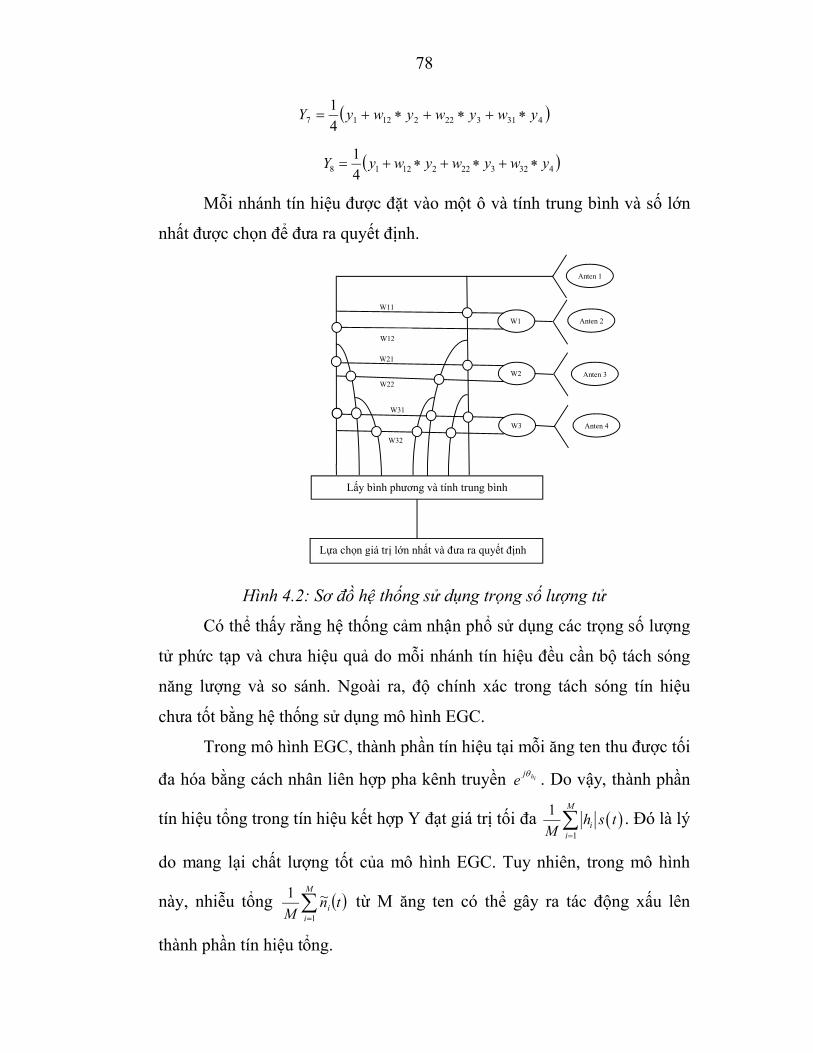
78
43132221217 4
1ywywywyY
43232221218 4
1ywywywyY
Mỗi nhánh tín hiệu được đặt vào một ô và tính trung bình và số lớn
nhất được chọn để đưa ra quyết định.
Hình 4.2: Sơ đồ hệ thống sử dụng trọng số lượng tử
Có thể thấy rằng hệ thống cảm nhận phổ sử dụng các trọng số lượng
tử phức tạp và chưa hiệu quả do mỗi nhánh tín hiệu đều cần bộ tách sóng
năng lượng và so sánh. Ngoài ra, độ chính xác trong tách sóng tín hiệu
chưa tốt bằng hệ thống sử dụng mô hình EGC.
Trong mô hình EGC, thành phần tín hiệu tại mỗi ăng ten thu được tối
đa hóa bằng cách nhân liên hợp pha kênh truyền ihje
. Do vậy, thành phần
tín hiệu tổng trong tín hiệu kết hợp Y đạt giá trị tối đa 1
1 M
ii
h s tM . Đó là lý
do mang lại chất lượng tốt của mô hình EGC. Tuy nhiên, trong mô hình
này, nhiễu tổng
M
ii tn
M 1
~1 từ M ăng ten có thể gây ra tác động xấu lên
thành phần tín hiệu tổng.
Anten 1
W1
W2
W3
W11
W12
W21
W22
W31
W32
Anten 2
Anten 3
Anten 4
Lựa chọn giá trị lớn nhất và đưa ra quyết định
Lấy bình phương và tính trung bình

79
Trong hệ thống đề xuất, thành phần tín hiệu cộng với nhiễu tại mỗi
máy thu được tối đa hóa trước khi kết hợp với nhau bằng cách nhân liên
hợp với pha của tín hiệu thu iyje
.
yij
i iy t y t e (4.14)
1 1
1 1yi
M Mi
i iji i
y tY h s t n t
M Me
(4.15)
1 1
1 1hi
M Mi
i ii i
y th s t n t
M Me
(4.16)
Là kết quả của kỹ thuật kết hợp, nhiễu tại ăng ten thứ i chỉ ảnh
hưởng đến tín hiệu tại ăng ten này. Sự kết hợp này dẫn đến giá trị tối đa của
cả tín hiệu cộng nhiễu. Vì thế giá trị kỳ vọng của tín hiệu cộng nhiễu tăng
lên.
4.1.4. Ước lượng tín hiệu, nhiễu và các tham số không tập trung
Trong phần này trình bày cách ước lượng tín hiệu và nhiễu cũng như
các tham số không tập trung của phân bố Chi-square.
Số lượng mẫu dùng trong bộ tách sóng năng lượng cũng được sử
dụng để ước lượng kỳ vọng và phương sai của thành phần tín hiệu và
nhiễu. Số mẫu được dùng càng nhiều ở đầu thu, ước lượng đạt độ chính xác
càng cao. Giả sử T mẫu thu được sau khối ADC là Y[1], Y[2],…, Y[T]. Có
T biến ngẫu nhiên độc lập và cùng một dạng phân phối Y1, Y2,…, YT và Y[i]
là giá trị của biến ngẫu nhiên Yi. Giả sử các biến Yi là độc lập và cùng một
dạng phân phối xác suất, với kỳ vọng và phương sai của biến ngẫu nhiên là
(μ, σ2). Trong thực tế, không thể tính toán được giá trị này một cách chính
xác, nên cần phải tìm cách ước lượng chúng, gọi kết quả của phép ước
lượng là 2ˆ,ˆ .
Sử dụng phép ước lượng không lệch:
T
YYY T
...ˆ 21 (4.17)

80
T
iiY
T 1
22 ˆ1
ˆ (4.18)
22222 ˆˆ2ˆˆvarˆ YEYY (4.19)
Nếu T đủ lớn, ta có thể coi ˆ và 22ˆ
Trong bước tiếp theo, cần phải tìm ra hàm mật độ xác suất PDF của
giá trị kiểm tra u(t).
Đặt:
T
i
tukYtv
122
2
ˆˆ (4.20)
Biến ngẫu nhiên v(t) có phân bố Chi-square với bậc tự do là T và hệ
số không tập trung là:
2
2
ˆ
ˆ
T (4.21)
Ký hiệu hàm mật độ xác suất PDF và hàm phân bố tích lũy (CDF)
của phân bố Chi-square với biến v là: ,;TvfV và ,;TvFV . T và ξ tương
ứng là bậc tự do và hệ số không tập trung. PDF và CDF của giá trị kiểm tra
được tính toán theo các công thức sau:
,;ˆˆ
1,;
22T
vfTuf VU (4.22)
,;ˆ
,;2
Tv
FTuF VU (4.23)
Tương tự, đối với hệ thống sử dụng mô hình EGC và thống sử dụng
các trọng số lượng tử, giá trị kiểm tra có phân bố Chi- square với bậc tự do
là T, yếu tố khác nhau duy nhất giữa các mô hình là kỳ vọng, phương sai và
tham số không tập trung của bộ mẫu các tín hiệu tổng hợp đó. Khi biết
phân bố của giá trị kiểm tra và cố định một tham số (PFA hoặc PMD), sẽ tính
được giá trị ngưỡng và các tham số còn lại.
Trong thực tế, trước hết hệ thống được đặt trong môi trường nhiễu và
không có tín hiệu của người dùng sơ cấp để thu được các mẫu ban đầu
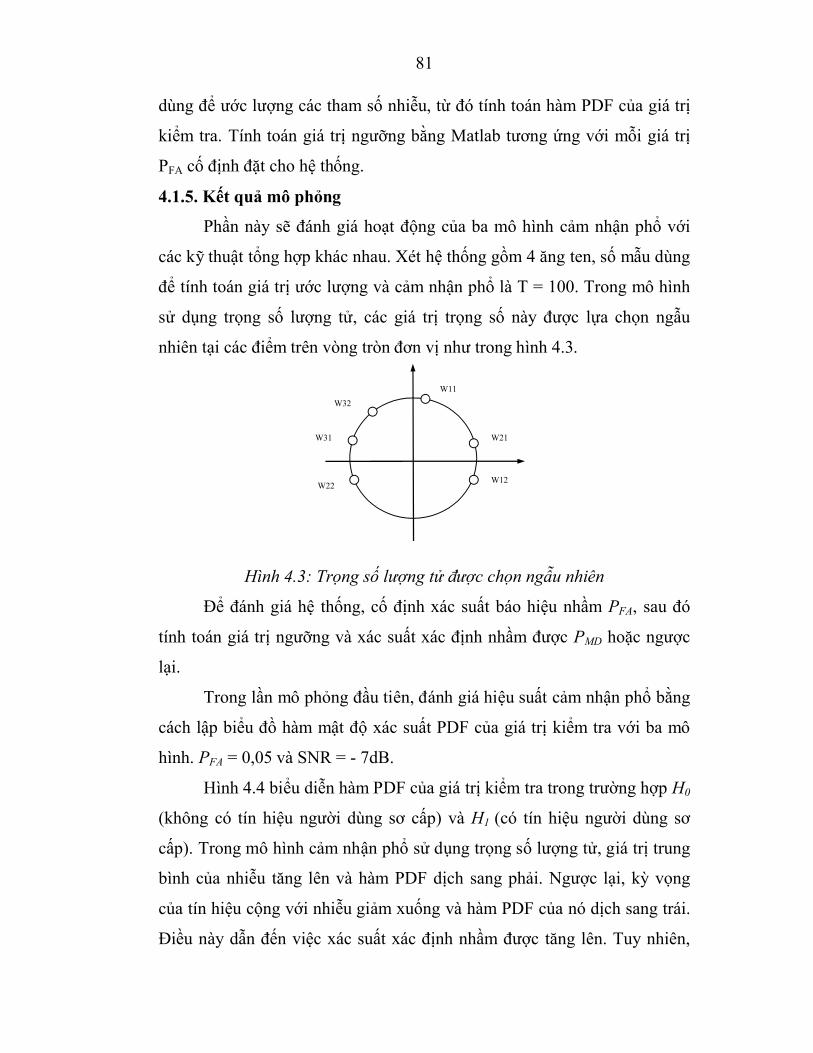
81
dùng để ước lượng các tham số nhiễu, từ đó tính toán hàm PDF của giá trị
kiểm tra. Tính toán giá trị ngưỡng bằng Matlab tương ứng với mỗi giá trị
PFA cố định đặt cho hệ thống.
4.1.5. Kết quả mô phỏng
Phần này sẽ đánh giá hoạt động của ba mô hình cảm nhận phổ với
các kỹ thuật tổng hợp khác nhau. Xét hệ thống gồm 4 ăng ten, số mẫu dùng
để tính toán giá trị ước lượng và cảm nhận phổ là T = 100. Trong mô hình
sử dụng trọng số lượng tử, các giá trị trọng số này được lựa chọn ngẫu
nhiên tại các điểm trên vòng tròn đơn vị như trong hình 4.3.
Hình 4.3: Trọng số lượng tử được chọn ngẫu nhiên
Để đánh giá hệ thống, cố định xác suất báo hiệu nhầm PFA, sau đó
tính toán giá trị ngưỡng và xác suất xác định nhầm được PMD hoặc ngược
lại.
Trong lần mô phỏng đầu tiên, đánh giá hiệu suất cảm nhận phổ bằng
cách lập biểu đồ hàm mật độ xác suất PDF của giá trị kiểm tra với ba mô
hình. PFA = 0,05 và SNR = - 7dB.
Hình 4.4 biểu diễn hàm PDF của giá trị kiểm tra trong trường hợp H0
(không có tín hiệu người dùng sơ cấp) và H1 (có tín hiệu người dùng sơ
cấp). Trong mô hình cảm nhận phổ sử dụng trọng số lượng tử, giá trị trung
bình của nhiễu tăng lên và hàm PDF dịch sang phải. Ngược lại, kỳ vọng
của tín hiệu cộng với nhiễu giảm xuống và hàm PDF của nó dịch sang trái.
Điều này dẫn đến việc xác suất xác định nhầm được tăng lên. Tuy nhiên,
W11
W12
W21
W22
W31
W32
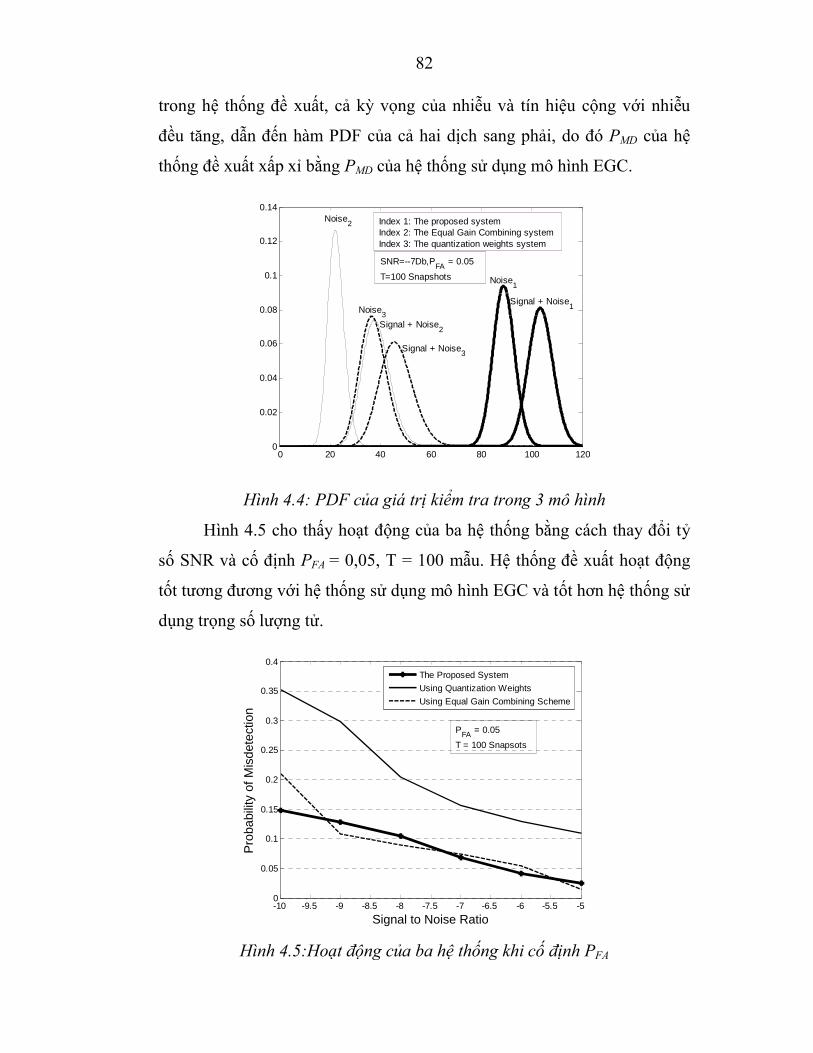
82
trong hệ thống đề xuất, cả kỳ vọng của nhiễu và tín hiệu cộng với nhiễu
đều tăng, dẫn đến hàm PDF của cả hai dịch sang phải, do đó PMD của hệ
thống đề xuất xấp xỉ bằng PMD của hệ thống sử dụng mô hình EGC.
0 20 40 60 80 100 1200
0.02
0.04
0.06
0.08
0.1
0.12
0.14Noise
2
Noise3
Signal + Noise3
Signal + Noise2
Noise1
Signal + Noise1
Index 1: The proposed systemIndex 2: The Equal Gain Combining systemIndex 3: The quantization weights system
SNR=--7Db,PFA
= 0.05
T=100 Snapshots
Hình 4.4: PDF của giá trị kiểm tra trong 3 mô hình
Hình 4.5 cho thấy hoạt động của ba hệ thống bằng cách thay đổi tỷ
số SNR và cố định PFA = 0,05, T = 100 mẫu. Hệ thống đề xuất hoạt động
tốt tương đương với hệ thống sử dụng mô hình EGC và tốt hơn hệ thống sử
dụng trọng số lượng tử.
-10 -9.5 -9 -8.5 -8 -7.5 -7 -6.5 -6 -5.5 -50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Signal to Noise Ratio
Pro
babi
lity
of M
isd
ete
ctio
n
The Proposed System
Using Quantization Weights
Using Equal Gain Combining Scheme
PFA
= 0.05
T = 100 Snapsots
Hình 4.5:Hoạt động của ba hệ thống khi cố định PFA
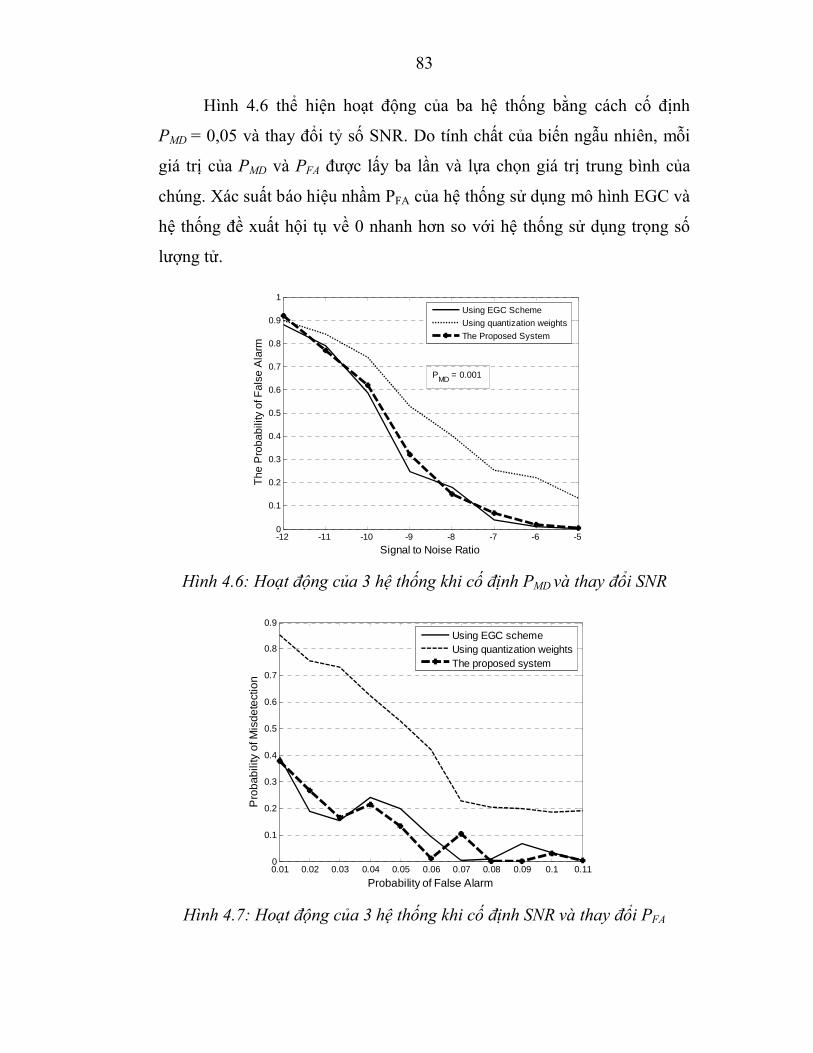
83
Hình 4.6 thể hiện hoạt động của ba hệ thống bằng cách cố định
PMD = 0,05 và thay đổi tỷ số SNR. Do tính chất của biến ngẫu nhiên, mỗi
giá trị của PMD và PFA được lấy ba lần và lựa chọn giá trị trung bình của
chúng. Xác suất báo hiệu nhầm PFA của hệ thống sử dụng mô hình EGC và
hệ thống đề xuất hội tụ về 0 nhanh hơn so với hệ thống sử dụng trọng số
lượng tử.
-12 -11 -10 -9 -8 -7 -6 -50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Signal to Noise Ratio
The
Pro
bab
ility
of F
alse
Ala
rm
Using EGC Scheme
Using quantization weights
The Proposed System
PMD = 0.001
Hình 4.6: Hoạt động của 3 hệ thống khi cố định PMD và thay đổi SNR
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.110
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Probability of False Alarm
Pro
bab
ility
of M
isde
tect
ion
Using EGC schemeUsing quantization weightsThe proposed system
Hình 4.7: Hoạt động của 3 hệ thống khi cố định SNR và thay đổi PFA
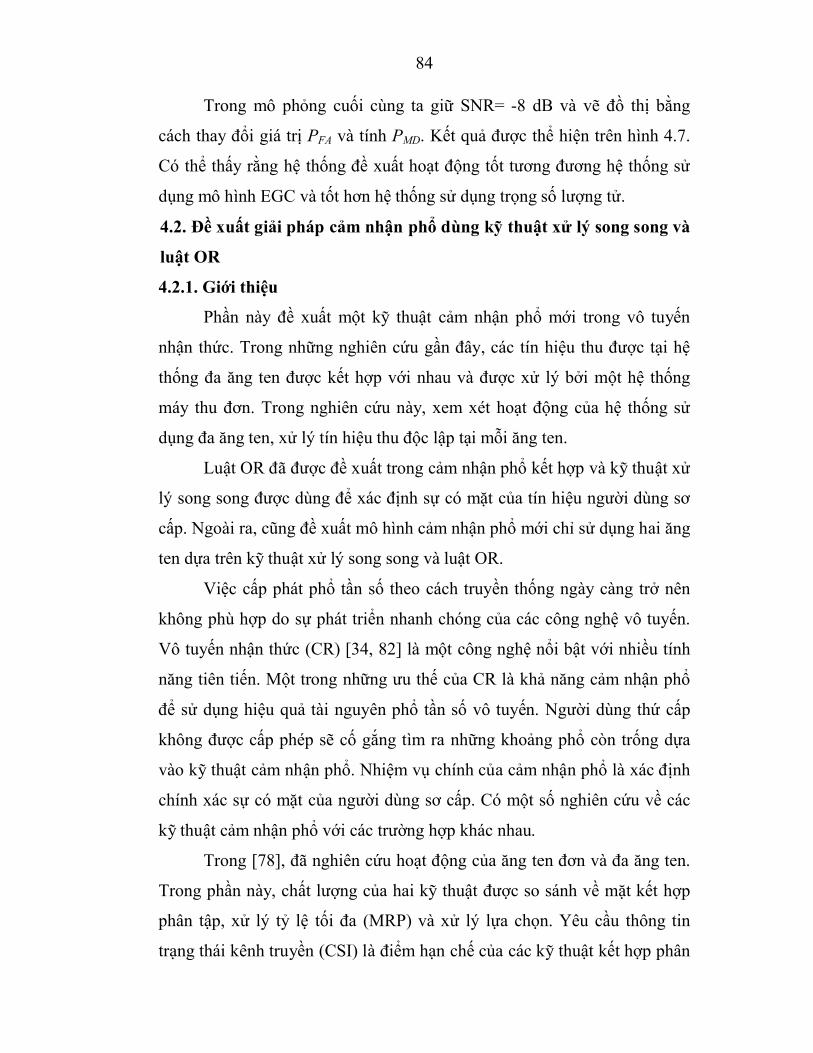
84
Trong mô phỏng cuối cùng ta giữ SNR= -8 dB và vẽ đồ thị bằng
cách thay đổi giá trị PFA và tính PMD. Kết quả được thể hiện trên hình 4.7.
Có thể thấy rằng hệ thống đề xuất hoạt động tốt tương đương hệ thống sử
dụng mô hình EGC và tốt hơn hệ thống sử dụng trọng số lượng tử.
4.2. Đề xuất giải pháp cảm nhận phổ dùng kỹ thuật xử lý song song và
luật OR
4.2.1. Giới thiệu
Phần này đề xuất một kỹ thuật cảm nhận phổ mới trong vô tuyến
nhận thức. Trong những nghiên cứu gần đây, các tín hiệu thu được tại hệ
thống đa ăng ten được kết hợp với nhau và được xử lý bởi một hệ thống
máy thu đơn. Trong nghiên cứu này, xem xét hoạt động của hệ thống sử
dụng đa ăng ten, xử lý tín hiệu thu độc lập tại mỗi ăng ten.
Luật OR đã được đề xuất trong cảm nhận phổ kết hợp và kỹ thuật xử
lý song song được dùng để xác định sự có mặt của tín hiệu người dùng sơ
cấp. Ngoài ra, cũng đề xuất mô hình cảm nhận phổ mới chỉ sử dụng hai ăng
ten dựa trên kỹ thuật xử lý song song và luật OR.
Việc cấp phát phổ tần số theo cách truyền thống ngày càng trở nên
không phù hợp do sự phát triển nhanh chóng của các công nghệ vô tuyến.
Vô tuyến nhận thức (CR) [34, 82] là một công nghệ nổi bật với nhiều tính
năng tiên tiến. Một trong những ưu thế của CR là khả năng cảm nhận phổ
để sử dụng hiệu quả tài nguyên phổ tần số vô tuyến. Người dùng thứ cấp
không được cấp phép sẽ cố gắng tìm ra những khoảng phổ còn trống dựa
vào kỹ thuật cảm nhận phổ. Nhiệm vụ chính của cảm nhận phổ là xác định
chính xác sự có mặt của người dùng sơ cấp. Có một số nghiên cứu về các
kỹ thuật cảm nhận phổ với các trường hợp khác nhau.
Trong [78], đã nghiên cứu hoạt động của ăng ten đơn và đa ăng ten.
Trong phần này, chất lượng của hai kỹ thuật được so sánh về mặt kết hợp
phân tập, xử lý tỷ lệ tối đa (MRP) và xử lý lựa chọn. Yêu cầu thông tin
trạng thái kênh truyền (CSI) là điểm hạn chế của các kỹ thuật kết hợp phân
85
tập như MRP hay kỹ thuật kết hợp độ lợi cân bằng (EGC). Trong [24], hệ
thống không sử dụng CSI đã được xem xét. Chất lượng của hệ thống trong
[24] không cao như hệ thống sử dụng kỹ thuật EGC. Nghiên cứu trong [81]
đã đánh giá chất lượng của hệ thống sử dụng các tham số ước lượng để tính
toán giá trị ngưỡng. Một mô hình dùng để phân tích hiệu suất thống kê của
bộ tách sóng năng lượng được đề xuất. Trong phương pháp truyền thống sử
dụng đa ăng ten, tín hiệu nhận được tại mỗi ăng ten được kết hợp với nhau
bằng các kỹ thuật khác nhau. Trong [79], ý tưởng về kỹ thuật cảm nhận
song song dùng với đa ăng ten được đề xuất. Bằng cách thay đổi số lượng
ăng ten và kích thước FFT, phần này đã nghiên cứu hiệu quả của thời gian
cảm nhận.
Trong cảm nhận phổ kết hợp, có thể phối hợp nhiều phần tử vô tuyến
nhận thức để thực hiện cảm nhận phổ và sau đó trao đổi thông tin với nhau.
Dựa trên ý tưởng này, trong nghiên cứu ở đây sẽ đề xuất ý tưởng sử dụng
kỹ thuật cảm nhận phổ song song, trong đó mỗi ăng ten được coi như một
phần tử vô tuyến nhận thức. Sử dụng luật OR để xác định sự có mặt của tín
hiệu sơ cấp. Đã sử dụng luật OR trong cảm nhận phổ kết hợp và sau đó lại
áp dụng vào đa ăng ten trong vô tuyến nhận thức để nâng cao hiệu suất của
hệ thống. Với ý tưởng xử lý song song và luật OR, đề xuất một mô hình
cảm nhận phổ mới, chỉ sử dụng hai ăng ten và một bộ tạo biến ngẫu nhiên.
Luận án tiến hành mô phỏng để đánh giá chất lượng của mô hình đề xuất
với kỹ thuật SC và thể hiện khả năng cảm nhận phổ của hệ thống đề xuất
chỉ sử dụng hai ăng ten. Ngoài ra, hệ thống đề xuất sử dụng hai ăng ten
không yêu cầu thông tin CSI trong khi thực hiện việc cảm nhận phổ.
4.2.2. Các máy thu vô tuyến nhận thức đa ăng ten và đơn ăng ten
4.2.2.1. Ăng ten đơn
Xem xét vấn đề tách sóng tín hiệu trên kênh truyền có pha đinh và
nhiễu trắng. Gọi s(t), n(t) và h lần lượt là tín hiệu người dùng, nhiễu trắng
với giá trị kỳ vọng bằng 0 và biên độ của kênh truyền, 2T là số mẫu. Ý

86
tưởng sử dụng bộ tách sóng năng lượng để xác định sự có mặt của tín hiệu
người dùng sơ cấp được đề xuất từ trước đây khá lâu [80].
Đối với ăng ten đơn, tín hiệu thu được có thể được biểu diễn ở dạng
nhị phân:
tntsh
tnty (4.24)
H0: tín hiệu người dùng chính không tồn tại
H1: tín hiệu người dùng chính tồn tại
Tín hiệu thu được y(t) được đưa về băng cơ sở và lấy ra 2T mẫu. Giá
trị kiểm tra u được mô tả như sau:
T
kky
WNu
2
1
2
0)(
2
1 (4.25)
N0, W lần lượt là mật độ phổ nhiễu và băng thông tín hiệu. N(t) có
phân bố chuẩn với kỳ vọng bằng 0 và phương sai σ2. Giá trị kiểm tra u(t)
được so sánh với giá trị ngưỡng để xác định sự tồn tại của tín hiệu hay
không. Với giả thiết H0, u bao gồm tổng của 2T giá trị bình phương gồm
các biến ngẫu nhiên độc lập tuân theo phân bố chuẩn với kỳ vọng bằng 0.
Do vậy, u có phân bố Chi-square trung tâm với bậc tự do bằng 2T. Tương
tự như vậy, với H1, u có phân bố Chi-square không trung tâm với 2T bậc tự
do và tham số không trung tâm 2ρ trong đó ρ là tỷ số tín hiệu trên tạp âm.
Giá trị kiểm tra được so sánh với giá trị ngưỡng để quyết định xem tín hiệu
người dùng sơ cấp có tồn tại hay không.
Trong kỹ thuật cảm nhận phổ, có hai tham số cần quan tâm: Xác suất
báo hiệu nhầm, ký hiệu là PFA và xác suất xác định nhầm (PMD) hoặc xác
suất tách sóng được (PD = 1 - PMD).
0Pr HuobPFA 1Pr HuobPD (4.26)
Trong các biểu thức trên, λ là giá trị ngưỡng. Ta sẽ cố định một trong
hai giá trị (PFA hoặc PMD) để xác định giá trị ngưỡng và tính toán tham số
còn lại. Trong luận án cố định xác suất báo hiệu nhầm PFA; giá trị ngưỡng

87
được tính toán dựa trên phân bố Chi-square. Sử dụng [83], dạng gần đúng
của xác suất tách sóng được tín hiệu đối với ăng ten đơn:
threTthresad QHuobP ,2Pr 1_ (4.27)
QT(a,b) là hàm Q Marcum, theo công thức sau:
1
1
2/1
22
,,T
kk
kba
T a
bI
a
bebaQbaQ (4.28)
dxaxIexbaQb
xa )(., 02/)(
1
22
(4.29)
Trong đó hàm Ik(x) là hàm Bessel bậc k.
Giả sử kênh truyền là kênh pha đinh Rayleigh, kênh truyền có phân
bố Rayleigh. Tỷ số SNR của kênh truyền có hàm mật độ xác suất PDF là:
0,1
ef (4.30)
là giá trị SNR trung bình của kênh truyền. Do đó, giá trị trung bình của
xác suất tách sóng được là:
0
,2 dfQP threTdsa(4.31)
Theo [78], ta có:
thred TJPsa
,1,, (4.32)
Dạng tổng quát của hàm J được mô tả như sau:
dxexxm
Qm
mTJ xmthreTthre
212
0
,2
!1
2,,,
(4.33)
Đặt:
0
2/12 22
, dxexbaxQTQ xpmT (4.34)

88
1
1
222
2
2
1
22
22
221
2222
222
!12
2;1;11
212
T
n
ap
ab
m
m
n
bn
eap
a
p
m
ap
abnmF
map
n
embTQ
22
22
1
1
22
2
2
2
22
222
022
2
21
2 ap
pbL
ap
p
a
p
ap
abL
ap
pm
m
k
km
k
(4.35)
Trong đó, 1F1 (.; .; .) là hàm hình học cao cấp, dạng tổng quát của hàm này
với p, q là hai số tự nhiên:
!...
...;,...,,;,...,,
0 21
21
2121 n
z
bbb
aaazbbbaaapFq
n
n nqnn
npnnqp
(4.36)
(a)n = a(a+1)(a+2)…(a+n-1), với (a)0 = 1 (4.37)
4.2.2.2. Đa ăng ten
Giả sử ta có M ăng ten tại bên thu, ký hiệu s(t), n(t), h giống như
trên, i là chỉ số của mỗi ăng ten. Nhiễu và biên độ kênh truyền tại mỗi ăng
ten giả thiết là độc lập với nhau. Tín hiệu thu được tại nhánh thứ i là:
tntshty iii với i = 1,2,…, M (4.38)
Bằng các kỹ thuật kết hợp phân tập khác nhau như MRP, EGC hay
SC, thu được tín hiệu tại đầu vào bộ tách sóng năng lượng khác nhau, có
thể biểu diễn dưới dạng hàm như sau: tytytyfty M,...,, 21 .
Xét kỹ thuật kết hợp lựa chọn SC, các nhánh nhận tín hiệu và lựa
chọn nhánh có SNR cao nhất đưa vào bộ tách sóng năng lượng để xử lý.
Kỹ thuật này không yêu cầu kết hợp pha của nhiều nhánh, giá trị trung bình
của SNR được tính toán theo công thức sau [84]:
M
i i1
1 (4.39)
Giá trị trung bình của SNR có hàm mật độ xác suất được tính theo
công thức sau:
1
0
1/2
1
1
1/
1
1
11
M
i
iMi
M
sp eii
CMeeM
f
(4.40)
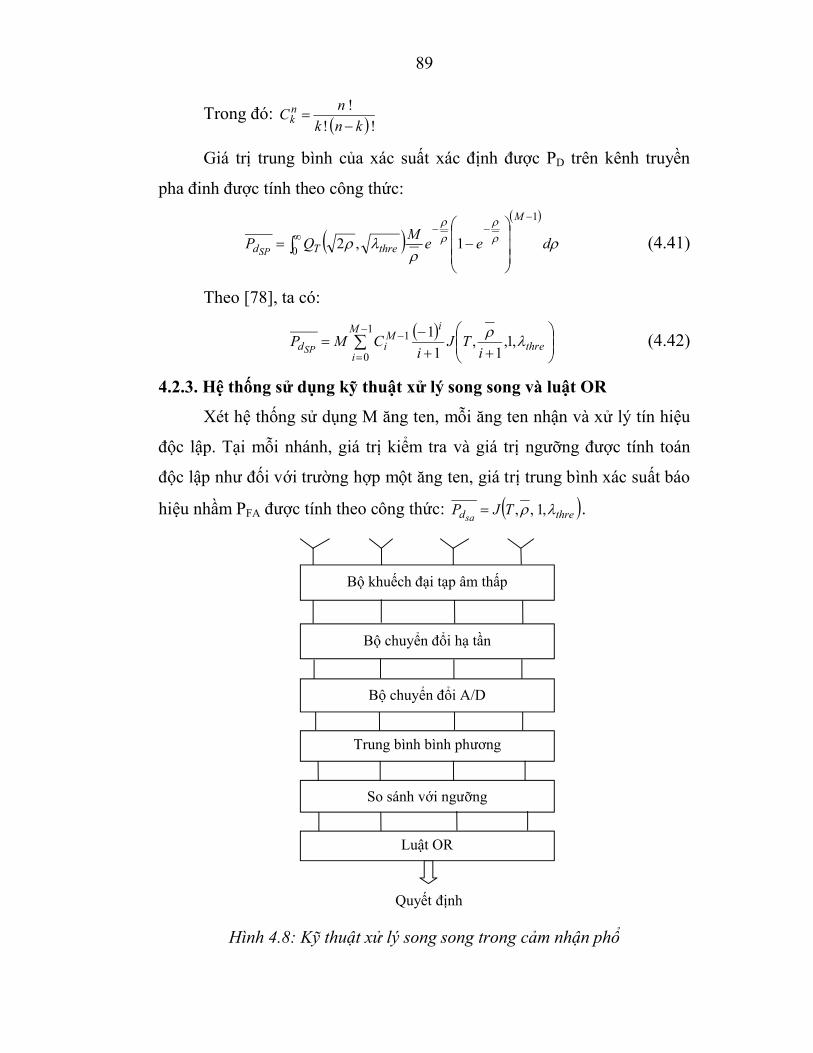
89
Trong đó: !!
!
knk
nC n
k
Giá trị trung bình của xác suất xác định được PD trên kênh truyền
pha đinh được tính theo công thức:
deeM
QP
M
threTdSP
1
01,2
(4.41)
Theo [78], ta có:
1
0
1 ,1,1
,1
1M
ithre
iMid i
TJi
CMPSP
(4.42)
4.2.3. Hệ thống sử dụng kỹ thuật xử lý song song và luật OR
Xét hệ thống sử dụng M ăng ten, mỗi ăng ten nhận và xử lý tín hiệu
độc lập. Tại mỗi nhánh, giá trị kiểm tra và giá trị ngưỡng được tính toán
độc lập như đối với trường hợp một ăng ten, giá trị trung bình xác suất báo
hiệu nhầm PFA được tính theo công thức: thred TJPsa
,1,, .
Hình 4.8: Kỹ thuật xử lý song song trong cảm nhận phổ
Bộ khuếch đại tạp âm thấp
Bộ chuyển đổi hạ tần
Trung bình bình phương
So sánh với ngưỡng
Luật OR
Quyết định
Bộ chuyển đổi A/D

90
Tín hiệu thu tại mỗi ăng ten được chuyển sang tín hiệu IF và lấy
mẫu. Các mẫu này (2T mẫu với mỗi nhánh) được đặt vào thiết bị sắp xếp
và được tính trung bình để tính toán giá trị kiểm tra. Có M giá trị kiểm tra
tương ứng với M ăng ten (M nhánh). Các giá trị kiểm tra được so sánh với
các giá trị ngưỡng này và xác định sự xuất hiện của tín hiệu người dùng sơ
cấp bằng luật OR. Nếu một trong các nhánh có kết luận là tín hiệu người
dùng tồn tại, hệ thống sẽ kết luận là có tín hiệu. Ngược lại, tất cả các nhánh
đều kết luận là không có tín hiệu, hệ thống sẽ kết luận là không có tín hiệu.
Đây là nội dung của luật OR sử dụng trong kỹ thuật cảm nhận phổ kết hợp.
Xem xét một hệ thống có M ăng ten và xác suất báo hiệu nhầm cố
định là PFA_system. Gọi xác suất báo hiệu nhầm, xác suất xác định nhầm, giá
trị kiểm tra tại nhánh i lần lượt là PFA_i, PMD_i, và Ui. Xác suất báo hiệu
nhầm và xác suất xác định nhầm của hệ thống được tính toán theo các công
thức:
Mi iFAsystemFA PP 1 __ 11 (4.43)
Mi iMDsystemMD PP 1 __ (4.44)
Để không mất tính tổng quát, ta giả sử các nhánh này có cùng xác
suất báo hiệu nhầm và tỷ lệ không tách sóng được tín hiệu.
PFA_i =PFA_branch và PMD_i = PMD_branch, công thức (4.43) và (4.44) trở thành:
MbranchFAsystemFA PP __ 11 (4.45)
MbranchMDsystemMD PP __ (4.46)
4.2.4. Hệ thống đề xuất sử dụng hai ăng ten
Dựa trên ý tưởng về kỹ thuật xử lý song song và luật OR, chúng tôi
đề xuất một hệ thống cảm nhận phổ chỉ yêu cầu hai ăng ten và một bộ tạo
biến ngẫu nhiên như hình 4.9 dưới đây:
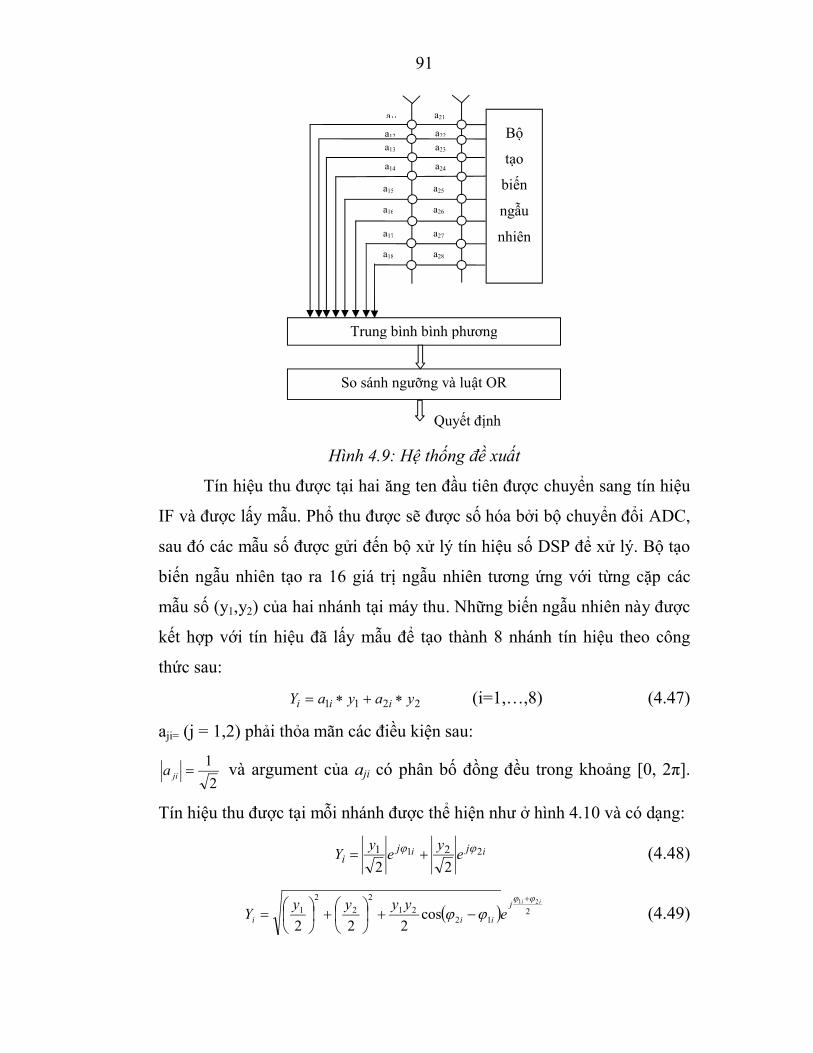
91
Hình 4.9: Hệ thống đề xuất
Tín hiệu thu được tại hai ăng ten đầu tiên được chuyển sang tín hiệu
IF và được lấy mẫu. Phổ thu được sẽ được số hóa bởi bộ chuyển đổi ADC,
sau đó các mẫu số được gửi đến bộ xử lý tín hiệu số DSP để xử lý. Bộ tạo
biến ngẫu nhiên tạo ra 16 giá trị ngẫu nhiên tương ứng với từng cặp các
mẫu số (y1,y2) của hai nhánh tại máy thu. Những biến ngẫu nhiên này được
kết hợp với tín hiệu đã lấy mẫu để tạo thành 8 nhánh tín hiệu theo công
thức sau:
2211 yayaY iii (i=1,…,8) (4.47)
aji= (j = 1,2) phải thỏa mãn các điều kiện sau:
2
1jia và argument của aji có phân bố đồng đều trong khoảng [0, 2π].
Tín hiệu thu được tại mỗi nhánh được thể hiện như ở hình 4.10 và có dạng:
ii jji e
ye
yY 21
2221 (4.48)
212
21
2
2
2
121
cos222
iij
iii eyyyy
Y
(4.49)
Trung bình bình phương
So sánh ngưỡng và luật OR
Quyết định
a11
a12
a13
a14
a15
a16
a17
a18
a22
a23
a24
a25
a26
a27
a28
a21
Bộ
tạo
biến
ngẫu
nhiên
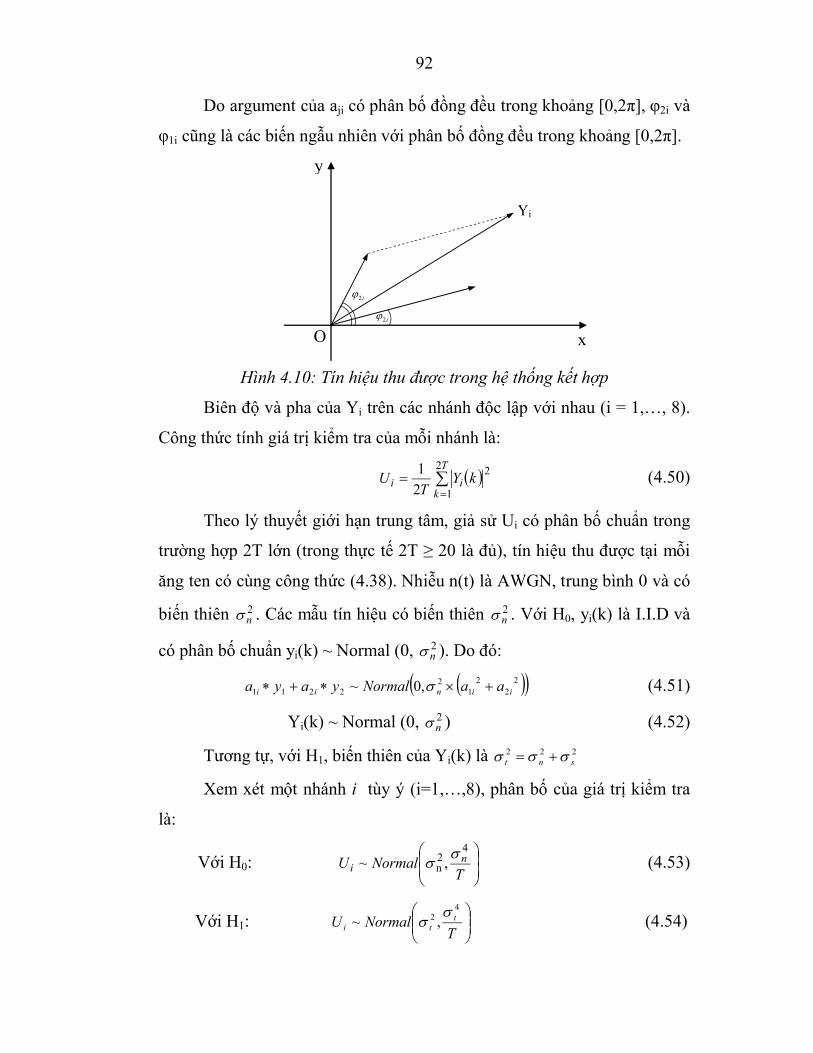
92
Do argument của aji có phân bố đồng đều trong khoảng [0,2π], φ2i và
φ1i cũng là các biến ngẫu nhiên với phân bố đồng đều trong khoảng [0,2π].
Hình 4.10: Tín hiệu thu được trong hệ thống kết hợp
Biên độ và pha của Yi trên các nhánh độc lập với nhau (i = 1,…, 8).
Công thức tính giá trị kiểm tra của mỗi nhánh là:
T
kii kY
TU
2
1
2
2
1 (4.50)
Theo lý thuyết giới hạn trung tâm, giả sử Ui có phân bố chuẩn trong
trường hợp 2T lớn (trong thực tế 2T ≥ 20 là đủ), tín hiệu thu được tại mỗi
ăng ten có cùng công thức (4.38). Nhiễu n(t) là AWGN, trung bình 0 và có
biến thiên 2n . Các mẫu tín hiệu có biến thiên 2
n . Với H0, yi(k) là I.I.D và
có phân bố chuẩn yi(k) ~ Normal (0, 2n ). Do đó:
22
21
22211 ,0~ iinii aaNormalyaya (4.51)
Yi(k) ~ Normal (0, 2n ) (4.52)
Tương tự, với H1, biến thiên của Yi(k) là 222snt
Xem xét một nhánh i tùy ý (i=1,…,8), phân bố của giá trị kiểm tra
là:
Với H0:
TNormalU n
i
42n ,~ (4.53)
Với H1:
T
NormalU tti
42 ,~
(4.54)
Yi
y
x
i2
i2
O
93
Cố định một trong hai tham số PFA hoặc PMD, giá trị ngưỡng được lấy
từ các công thức:
T
PQ FAnFA
12 1 (4.55)
T
PQ DsnD
122 1 (4.56)
Biên độ của Yi là một biến độc lập đối với mỗi nhánh (i = 1,…,8); do
vậy, phân bố của giá trị kiểm tra Ui đối với mỗi nhánh cũng độc lập. Xác
suất báo hiệu nhầm và tỷ lệ không tách sóng được của hệ thống được tính
toán theo công thức (4.35) và (4.36). Cho trước xác suất báo hiệu nhầm của
hệ thống systemFAP _ , ta có thể tính toán được xác suất báo hiệu nhầm của
mỗi nhánh branchFAP _ , sau đó tính toán giá trị ngưỡng và xác suất tách
sóng được tín hiệu cho mỗi nhánh:
TQP
sn
snFAbranchD
/22
22
_
(4.57)
Vai trò của bộ tạo biến ngẫu nhiên là kết hợp tín hiệu thu được từ hai
ăng ten với nhau để có 8 nhánh tín hiệu độc lập. Lợi thế của hệ thống được
đề xuất là không cần quá nhiều ăng ten. Hai ăng ten là số lượng ăng ten ít
nhất để có được tính độc lập trên mỗi nhánh. Nhờ vậy, sự phức tạp của hệ
thống có thể giảm xuống. Trong hệ thống, thay vì tăng số ăng ten ta tăng số
nhánh, lúc này mỗi nhánh tương đương với một ăng ten. Hạn chế của hệ
thống này là tính toán phức tạp hơn so với hệ thống hai ăng ten truyền
thống.
4.2.5. Kết quả mô phỏng
Mô phỏng hoạt động của hệ thống sử dụng kỹ thuật xử lý song song
và luật OR được đánh giá khi so sánh với hệ thống sử dụng mô hình kết
hợp lựa chọn. Kết quả mô phỏng được biểu diễn trên hình 4.11.
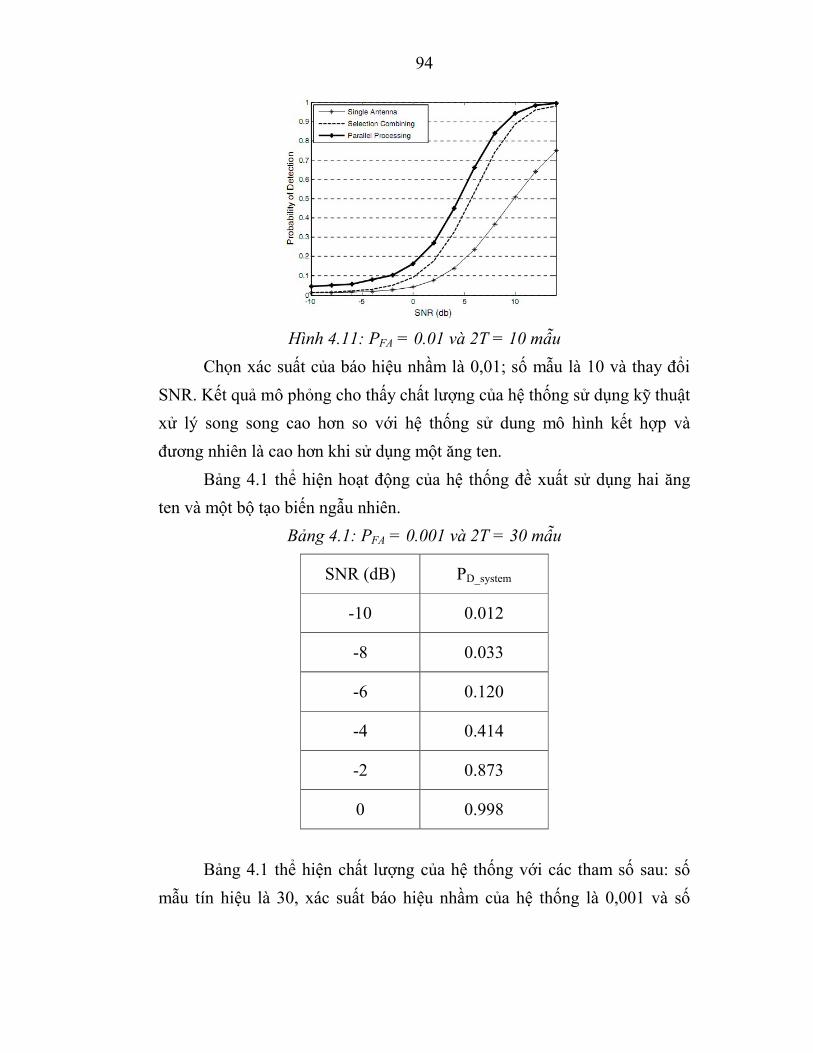
94
Hình 4.11: PFA = 0.01 và 2T = 10 mẫu
Chọn xác suất của báo hiệu nhầm là 0,01; số mẫu là 10 và thay đổi
SNR. Kết quả mô phỏng cho thấy chất lượng của hệ thống sử dụng kỹ thuật
xử lý song song cao hơn so với hệ thống sử dung mô hình kết hợp và
đương nhiên là cao hơn khi sử dụng một ăng ten.
Bảng 4.1 thể hiện hoạt động của hệ thống đề xuất sử dụng hai ăng
ten và một bộ tạo biến ngẫu nhiên.
Bảng 4.1: PFA = 0.001 và 2T = 30 mẫu
SNR (dB) PD_system
-10 0.012
-8 0.033
-6 0.120
-4 0.414
-2 0.873
0 0.998
Bảng 4.1 thể hiện chất lượng của hệ thống với các tham số sau: số
mẫu tín hiệu là 30, xác suất báo hiệu nhầm của hệ thống là 0,001 và số
95
nhánh là 8. Có thể thấy rằng hệ thống hoạt động tốt trong trường hợp SNR
cao hơn 2 dB.
Trong lần mô phỏng tiếp theo, cố định SNR = -5 dB, xác suất báo
hiệu nhầm là PFA = 0,005 và thay đổi số mẫu tín hiệu. Kết quả được trình
bày trong bảng 4.2.
Bảng 4.2: PFA = 0,005 và SNR = -5 dB
Số mẫu PD_system
30 0,412
50 0,591
70 0,731
90 0,833
120 0,926
150 0,970
Hệ thống hoạt động tốt trong trường hợp số mẫu tín hiệu lớn hơn 90.
Tăng số mẫu dẫn đến việc tăng xác suất tách sóng tín hiệu. Tuy nhiên, thời
gian cảm nhận phổ cũng tăng lên.
Trong lần mô phỏng cuối, cố định SNR = -3 dB, xác suất tách sóng
PD_system = 0,95, thay đổi số mẫu lấy, kết quả mô phỏng được trình bày
trong bảng 4.3.
Bảng 4.3: PD = 0,95 và SNR = -3 dB
Có thể thấy rằng tăng số mẫu dẫn đến việc giảm xác suất báo hiệu nhầm.
Số mẫu PFA_system
20 0,828
40 0,420
60 0,165
80 0,058
100 0,019
120 0,006
96
Kết luận chương 4
Chương 4 đề xuất một phương pháp cảm nhận phổ cho các hệ thống
vô tuyến nhận thức, sử dụng các mẫu tín hiệu thu được để ước lượng kỳ
vọng, phương sai của nhiễu và tín hiệu cộng với nhiễu, tiếp theo thực hiện
cảm nhận phổ bằng bộ tách sóng năng lượng. Phương pháp đề xuất không
yêu cầu thông tin trạng thái kênh CSI tại máy thu như các phương pháp
trước đây. Hoạt động của phương pháp đề xuất được đánh giá, so sánh với
các phương pháp khác bằng mô phỏng. Từ kết quả mô phỏng nhận thấy
rằng, phương pháp đề xuất có chất lượng tốt như hệ thống sử dụng mô hình
EGC và tốt hơn hệ thống sử dụng trọng số lượng tử.
Đồng thời chương này cũng đưa ra giải pháp cảm nhận phổ kết hợp
kỹ thuật xử lý song song và luật OR. Đánh hoạt động của hệ thống đề xuất
bằng cách thay đổi SNR trong lần mô phỏng đầu tiên, thay đổi số mẫu
trong hai lần mô phỏng tiếp theo. Hệ thống hoạt động tốt hơn khi tăng tỷ số
SNR, số lượng mẫu.
97
KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN
Luận án đã đề xuất các giải pháp nhằm ước lượng các tham số của
tín hiệu không tương quan và tương quan trong hệ thống thông tin, định vị
vô tuyến với độ phân giải và tính chính xác cao, phát triển kiến trúc máy
thu mới hướng đến mô hình máy thu thông minh tự cấu hình. Đồng thời đề
xuất kỹ thuật cảm nhận phổ sử dụng đa ăng ten và bộ tách sóng năng lượng
trong hệ thống vô tuyến nhận thức và đã đạt được những kết quả chính sau
đây:
1) Đề xuất thuật toán ước lượng tham số CFO và FDOA của tín hiệu
trong hệ thống thông tin vô tuyến. Kết quả này được đăng tải ở công
trình số (4) và số (7) trong danh mục các công trình công bố của tác
giả.
2) Đề xuất, cải tiến thuật toán ước lượng đồng thời các tham số của tín
hiệu là DOA, tần số Doppler, trễ truyền sóng và DOA theo góc phương
vị, góc ngẩng trong hệ thống thông tin vô tuyến. Kết quả này được
đăng tải ở công trình số (8) trong danh mục các công trình công bố của
tác giả.
3) Đề xuất giải pháp cảm nhận phổ trong hệ thống thông tin vô tuyến
không sử dụng CSI mà dựa trên các tham số ước lượng, đồng thời đề
xuất giải pháp cảm nhận phổ sử dụng kỹ thuật xử lý song song và luật
OR. Kết quả này được đăng tải ở công trình số (1), số (2) và số (3)
trong danh mục các công trình công bố của tác giả.
4) Đề xuất kiến trúc máy thu mới sử dụng cho bài toán ước lượng DOA.
Kết quả này được đăng tải ở công trình số (5) trong danh mục các công
trình công bố của tác giả.
98
Hướng nghiên cứu tiếp theo của Luận án:
Để tiếp tục nghiên cứu, phát triển những kết quả đã đạt được, mở
rộng phạm vi nghiên cứu và ứng dụng thực tế trong lĩnh vực thông tin vô
tuyến, từ công việc nghiên cứu của mình, chúng tôi thấy xuất hiện hướng
nghiên cứu tiếp theo của Luận án như sau:
1) Nghiên cứu bài toán ước lượng các tham số tín hiệu trong trường hợp
tín hiệu băng rộng.
2) Nghiên cứu phương pháp xử lý trong trường hợp nhiễu không phải là
nhiễu trắng mà là nhiễu màu.
3) Nghiên cứu hoàn thiện bài toán ước lượng số nguồn tín hiệu.
Ngoài ra, nếu điều kiện cho phép, trong thời gian tới có thể chế tạo thử
nghiệm các thiết bị để đo thử, áp dụng giải pháp ước lượng các tham số của
tín hiệu đã đề xuất.

99
DANH MỤC CÁC CÔNG TRÌNH ĐÃ CÔNG BỐ
1. Pham Duy Phong, Dang Trung Chinh anh Vu Van Yem, ”A Novel Spectrum Sensing Without Channel State Information Using Estimated Parameters,“ Research, Development and Application on Information & Communication Technology journal, Volume E-1, Number 3 (7), p. 56-63, December 2010.
2. Pham Duy Phong, Dang Trung Chinh and Vu Van Yem, "OR Rule and Parallel Processing Technique in Multiple antennas for Spectrum Sensing" The third International Conference on Communications and Electronics, ICCE 2010, Nha Trang, Vietnam, August 13-15, p. 273 -277, 2010.
3. Pham Duy Phong, Dang Trung Chinh, Vu Van Yem and Nguyen Van Khang,” More Practical Spectrum Sensing Technique in Cognitive Radio Networks,” The 2010 International Conference on Advanced Technologies for Communications, ATC 2010, Ho Chi Minh City, Vietnam, October 20-22, 2010.
4. Tran Ngoc Dung, Mai Thanh Nga, Vu Van Yem, Pham Duy Phong and Nguyen Xuan Quynh, “Candidates for Estimating Carrier Frequency Offset in MIMO Systems”, International Conference on Advanced Technologies for Communications, September 2009.
5. Yem Van Vu, Thanh Huu Nguyen, Phong Duy Pham, Viet Minh Pham, “A Robust Single Channel Direction Finding System”, in Proceedings of International Symposium on Multimedia and Communication Technology 2009 (ISMAC 2009), January 22- 23, 2009, Bangkok, Thailand.
6. Mai Thanh Nga, Vu Van Yem, Pham Duy Phong and Nguyen Huu Thanh, “A planar quasi-Yagi For Next Generation Wireless Communication Systems,” Research, Development on Electronics, Telecommunications and Information technology Journal, Issue 3,December 2008.
7. Pham Duy Phong, Vu Van Yem "High rosolution agorithm for frequency difference of arrival estimation", Proceeding of South East Asian Technical University Consortium (SEATUC), Bangkok, Thailand, March 2012.
8. Pham Duy Phong and Vu Van Yem ”Joint signal parameters estimation for advanced wireless positioning systems” Proceeding of South East Asian Technical University Consortium (SEATUC), Bangkok, Thailand, March 2012.
100
TÀI LIỆU THAM KHẢO
Tiếng việt:
[1] Nguyễn Quốc Khương, "Kỹ thuật cấp phát kênh động cho mạng
thông tin di động sử dụng công nghệ MIMO-OFDMA", Luận án tiến
sĩ kỹ thuật, Trường Đại học Bách khoa Hà Nội, 2011.
[2] Lê Thanh Hải, "Nghiên cứu xây dựng thuật toán lọc không gian các
đặc trưng phi tuyến trong hệ thống radar thụ động", Luận án tiến sĩ
kỹ thuật, Viện Điện tử Viễn thông, Viện Khoa học và Công nghệ
Quân sự, Bộ Quốc phòng 2011.
[3] Lâm Hồng Thạch, Vũ Văn Yêm, Nguyễn Quốc Bình và Phan Anh,
"Giới hạn số nguồn sóng tới có thể ước lượng khi sử dụng phương
pháp đa tần" Hội thảo khoa học quốc gia lần thứ 4 về Nghiên cứu,
phát triển và ứng dụng Công nghệ thông tin và truyền thông
ICT.rda’08.
[4] Mai Quốc Khánh, "Nghiên cứu phương pháp nâng cao chất lượng thu
tín hiệu số sử dụng kỹ thuật san bằng Turbo" Luận án tiến sĩ kỹ thuật,
Học viện Kỹ thuật Quân sự, Bộ Quốc phòng, 2011.
[5] Vũ Văn Yêm, Lâm Hồng Thạch, Phan Anh, "Ứng dụng thuật toán
MUSIC trong việc xác định vị trí tàu thuyền đánh cá loại vừa và nhỏ
hoạt động ở vùng ven biển". Tạp chí Điện tử ngày nay, 2007.
[6] Lâm Hồng Thạch, Vũ Văn Yêm, Phan Anh, “Giới hạn phân biệt
hướng sóng tới khi sử dụng thuật toán MUSIC", Hội nghị thông tin
và định vị vì sự phát triển của kinh tế biển Việt nam, 2007.
Tiếng Anh:
[7] S.M. Alamouti, “A simple transmit diversity technique for wireless
communications”, IEEE J. Select. Areas Commun, vol.16, No. 8, pp.
1451-1458, October 1998.
101
[8] Hamid Jafarkhani, Space-Time Coding: Theory and Practice,
Cambridge University Press, 2005.
[9] Claude Oestges and Bruno Clerckx, Mimo wireless communications:
From real - world propagation to space - time code design,
Academic Press, 2007.
[10] P. Almers, E. Bonek, A. Burr, N. Czink, M. Debbah, V. Degli-
Esposti, H. Hofstetter, P. Kyösti, D. Laurenson, G. Matz, A. F.
Molisch, C. Oestges, and H. Özcelik,“Survey of channel and radio
propagation models for wireless MIMO systems”, EURASIP Journal
on Wireless Communications and Networking, Vol. 2007, Issue. 1,
pp. 56-56, Jan. 2007.
[11] G.J. Foschini and M.J. Gans, “On limits of wireless communications
in a fading environment when using multiple antennas,“ Wireless
Personal Commun, vol.6, pp. 311-335, Mar. 1998.
[12] Y. Yao, “Carrier Synchronization Techniques in MIMO Systems",
Ph.D. thesis, The University of Hong Kong, 2005.
[13] M.A. McKeown, D.G.M. Cruickshank, I.A.B Lindsay, J.S.
Thompson, S.A. Farson and Y. Hu, “Carrier frequency offset
estimation in BLAST MIMO systems" IEEE Electronics Letters,
vol.39, issue 24, 27, pp. 1752-1753, Nov. 2003.
[14] G.L. Stuber, J.R. Barry, S.W. McLaughlin, Ye Li, M.A. Ingram, T.G
Pratt, “Broadband MIMO-OFDM wireless communications,
Proceedings of the IEEE, Volume 92, Issue 2, pp. 271 - 294, Feb.
2004.
[15] I.E. Telatar, “Capacity of multi- antenna Gaussian channels”, AT&T
Bell Labs. Internal Tech. Memo, Jun. 1995.
[16] J. Paulraj and T. Kailath, “Increasing capacity in wireless broadcast
systems using distributed transmission/directional reception”, United
States Patent 5345599, 1994.
102
[17] Zhao Li; Qin Liu; Linjing Zhao, “Space Division Multiplexing
Aided Opportunistic Spectrum Access for Cognitive Radio
Networks,” Advanced Information Networking and Applications
(WAINA), 2011 IEEE Workshops of International Conference on,
pp. 232-237, March 2011.
[18] Roy, R.H., ”Spatial division multiple access technology and its
application to wireless communication systems, “IEEE Vehicular
Technology Conference, 1997 pp. 730 - 734 Vol 2.
[19] Zhengang Pan Kai-Kit Wong Tung-Sang Ng, ”Generalized
multiuser orthogonal space-division multiplexing,” IEEE
Transactionson Wireless Communications, Vol.3, Issue 6, pp. 1969 -
1973, Nov. 2004.
[20] Wu, Y. Cui, T. Tellambura, "Optimal low-complexity detection for
space division multiple access wireless systems,” IEEE
Communications Letters, Vol.10, Issue 3, pp.156 - 158, Mar 2006.
[21] Akyildiz F. I., Lee W.Y., Vuran M. C and Mohanty S. “Next
generation/ dynamic spectrum access / cognitive radio wireless
networks: A survey” May 2006.
[22] Haykin S. “Cognitive Radio: Brain-Empowered Wireless
Communications” Journal, IEEE, vol. 23, issue 2, Feb. 2005.
[23] Cabric, D., Mishra, S.M. and Brodersen, R.W “Implementation
Issues in Spectrum Sensing for Cognitive Radios” IEEE, vol. 1, Nov.
2004.
[24] Al-Abbasi, A.R.; Fujii, T. “A novel spectrum sensing method using
multi-antennas without channel state information”, Wireless
Communication Systems, 2009. ISWCS 2009. 6th International
Symposium on Volume, Issue, 7-10 Sept. 2009 Page(s): 373 - 377.
103
[25] J.Fout, A. Spanias, M. K. Banavar “Narrowband Direction of Arrival
Estimation for antenna Arrays”(2008) Morgan & Claypool
Publishers.
[26] Sathish Chandran “Advances in direction-of-arrival estimation”
(2006) ARTECH HOUSE, INC. 685 Canton Street Norwood, MA
02062.
[27] Bobin Yao, Wenjie Wang, Qinye Yin “Joint AOD and CFO
estimation in wireless sensor networks localization system,” Proc in
IEEE Wireless Communications and Networking Conference
(WCNC), 2011 IEEE pp. 2054 - 2058.
[28] R. O. Schmidt, “Multiple emitter location and signal parameter
estimation,” IEEE Transactions on antennas and Propagation, vol.
AP-34, pp. 276–280, Mar 1986.
[29] R. Roy and T. Kailath, “ESPRIT- Estimation of signal parameters via
rotational invariance techniques,” IEEE Transactions on Acoustics,
Speech, Signal Processing, vol. 37, pp. 984–995, July 1989
[30] T. J. Shan, M. Wax, and T. Kailath, “On spatial smoothing for
direction-of-arrival estimation of coherent signals,” IEEE Trans.
Acoust.,Speech Signal Processing, vol. ASSP-33, pp. 806-81 1, Aug.
1985.
[31] Ronald T. Wiliams, S. Prasad, A. K. Mahalanabis, and Leon H.
Sibul “ An Improved Spatial Smoothing Technique for Bearing
Estimation in a Multipath Environment” IEEE Transactions on
Acoustics, Speech, Signal Processing, 1988.
[32] Claude Oestges and Bruno Clerckx,, “MIMO wireless
communications: from real world propagation to space- time code
design,” Academic Press 2007.
104
[33] P. Kolodzy et al., “Next generation communications: Kickoff
meeting” in Proc. DARPA, Oct. 17, 2001.
[34] J. Mitola et al., “Cognitive radio: Making software radios more
personal,” IEEE Pers. Communications, vol. 6, no. 4, pp. 13- 18,
August 1999.
[35] J. Mitola, “Cognitive radio: An integrated agent architecture for
software defined radio,” Doctor of Technology, Royal Inst. Technol.
(KTH), Stockholm, Sweden, 2000.
[36] F.K. Jondral, “Software-defined radio-basic and evolution to
cognitive radio” EURASIP Journal on Wireless Communication and
Networking 2005.
[37] T. Weiss and F. Jondral, “Spectrum pooling: an innovative strategy
for the enhancement of spectrum efficiency,” IEEE Communications
Magazine, vol. 42, no. 3, pp. 8-14, May 2004.
[38] Huseyin Arslan, Cogntive Radio, Software Defined Radio, and
Adaptive Wireless Systems, Springer 2007.
[39] Behrouz Farhang-Boroujeny and Roland Kempter “Multicarrier
Communication Techniques for Spectrum Sensing and
Communication in Cognitive Radios” IEEE Communications
Magazine, vol 46, issue 4, pp. 80-85, 2008.
[40] Kimtho P0 and Jun-ichi Takada “Signal Detection based on Cyclic
Spectrum Estimation for Cognitive Radio in IEEE 802.22 WRAN
System” IEICE Tech. Rep., vol. 106, no. 558, SR2006-91, pp. 15-19,
March 2007.
[41] Amit Kataria “Thesis of Cognitive radio- spectrum sensing issues”
University of Missouri-Columbia, December 2007.
[42] Tevfik Yucek and Huseyin Arslan ”Spectrum characterization for
opportunistic cognitive radio systems” Military Communications
Conference, 2006. MILCOM 2006. IEEE.
105
[43] A.Swindlehurst, T.Kailath “A performance analysis of subspace-
based methods in the presence of model errors – part I: the MUSIC
algorithm “ Joint services program at Standford University, 1990.
[44] Judson Braga, Sofia Martinez, Van Yem Vu and Bernard Huyart
“MUSIC and Unitary-ESPRIT performance for propagation channel
sounding” Research, Development and Applications on Electronics,
Telecommunications and Information Technology, Vietnamese
National Journal, No. 3- 2008.
[45] Miguel A. Rojas, Miguel A. Lagunas, Hernandez, Ana I. Pérez
“Candidate spectral estimation for cognitive radio” 11th Conference
on 11th WSEAS International Conference on Communications -
Volume 11.
[46] M. Oner and F. Jondral, “On the extraction of the channel allocation
information in spectrum pooling systems,” IEEE Journal on Selected
Areas in Communications. 25(3), pp. 558–565, April 2007.
[47] W. A. Gardner, “Exploitation of spectral redundancy in
cyclostationary signals,” IEEE Signal Processing Magazine, vol. 8,
no. 2, pp. 14- 36, 1991.
[48] W. A. Gardner, “Spectral correlation of modulated signals-Part I:
Analog modulation,” IEEE Transactions on Communications, vol.
35, no. 6, pp. 584- 595, 1987.
[49] James O’Daniell Neel “Thesis: Analysis and Design of Cognitive
Radio Networks and Distributed Radio Resource Management
Algorithms” Electrical Engineering Department, Virginia Tech
University, Sep 6, 2006.
[50] Huseyin Arslan, Cogntive Radio, Software Defined Radio, and
Adaptive Wireless Systems, Springer 2007.
106
[51] Tevfik Yucek and Huseyin Arslan ”Spectrum characterization for
opportunistic cognitive radio systems” Military Communications
Conference, 2006. MILCOM 2006. IEEE.
[52] Dae-Ki Hong, Young-Jo Lee, Daesik Hong, “Robust Frequency
Offset Estimation for Pilot Ký tự Assisted Packet CDMA with
MIMO antenna Systems“, IEEE Communications Letters, Vol 6,
No.6, June 2002.
[53] M.Eric and M.Obradovic, “Subspace-based joint time-delay and
frequency-shift estimation in asynchoronous DS-CDMA systems“,
Electron. Lett, Vol.33, pp 1193-1195, July 1997.
[54] Young Seok Lim, and Jear Hong Lee, “An Efficient Carrier
Frequency Offset Estimation Scheme for an OFDM System“
Vehicular Technology Conference, 2000. IEEE VTS-Fal VTC 2000.
52nd Volume 5, Issue , 2000 Page(s): 2453 - 2458 vol.5.
[55] C. Paulus, H.-M. Bluthgen, M. Low, E. Sicheneder, “A 4 GS/s 6b
Flash ADC in 0.13 µm CMOS”, Symposium on VLSI Circuits,
Honolulu USA, 2004.
[56] V. Cizek, “Discrete Hilbert Transform,” IEEE Trans on Audio
Electro- Acoustics, vol. AU-18, no.4, Dec 1970, pp. 340- 343.
[57] Lam Hong Thach, Vu Van Yem and Phan Anh, ”Adaptive antenna
Array Applied to Position Location of Fishing Boats in the Vietnam
Seaside,” Proceeding of the 10th Vietnam Conference on Radio &
Electronics (REV’06), Hanoi- Vietnam, November 05-06, 2006.
[58] S. Salous, P. Fhilippidis, I. Hawkins, ”A Multi Channel Sounder
Architecture for Spatial and MIMO Characterisation of the Mobile
Radio Channel,” MIMO: Communications Systems from Concept to
Implementations,” IEEE Seminar on 12 Dec. 2001 Page(s): 18/1-
18/6.
107
[59] Wilson. P. F, Papazian. P. B, Cotton. M. G, Lo. Y, Bundy. S. C,
”Simultaneous wide-band four-antenna wireless channel-sounding
measurements at 1920 MHz in a suburban environment,” Vehicular
Technology, IEEE Transactions on Volume 50, Issue 1, Jan. 2001
Page(s): 67-78.
[60] Kuroda. K, Sakaguchi. K, Takada. J. C, Araki. K, ”FDM based
MIMO spatio-temporal channel sounder” Wireless Personal
Multimedia Communications, 2002. The 5th International
Symposium on Vol. 2, 27-30 Oct. 2002 Page(s):559 - 562 vol.2.
[61] RUSK channel sounder: http://www.channelsounder.de
[62] S.L.Preston, et al, « Base-station tracking in mobile communications
using a switched parasitic antenna array, IEEE Trans. On antenna and
propagation 46(6): 841-844, June 1998.
[63] R.Schlub et al, “dual-Band six-element switched parasitic array for
smart antenna cellular communications systems” Electronics Letter,
36:1342-1343, 2000.
[64] J. Rissanen, “Universal coding, information, prediction, and
estimation” IEEE Trans on Information Theory, vol. 30, Issue 4 Jul
1984, pp.629-636.
[65] J.D.Parsons, Feng D.A. Demery and A.M.D Turkmani, “Sounding
technique for wideband mobile radio channels: a review” IEE
PROCEEDINGS-1, vol.138, No.5, October 1991.
[66] H. Krim, and M. Viberg, "Two Decades of Array Signal Processing
Research," IEEE Signal Processing Magazine, pp. 67-94, July 1996.
[67] Josef Fuhl, Jean-Pierre Rossi and Ernst Bonek, “High-Resolution 3-D
Direction- of- Arrival Determination for Urban Mobile radio” IEEE
Trans on antennas and Propagation, vol.45, No.4, April 1997.
[68] K. Kalliola, H. Laitinen, P. Vainikainen, M. Toeltsch, J. Laurila,E.
Bonek, “3-D Double- Directional Radio Channel Characterisation for
108
Urban Macrocellular Applications,” IEEE Transactions on antennas
and Propagation, 2003.
[69] H. Yamada, M. Ohmiya, Y. Ogawa, “Superresolution Techniques for
Time-Domain Measurements with a Network Analyzer” IEEE
Transactions on antennas And Propagation, vol. 39, No. 2, February
1991.
[70] T. Quiniou, “Conception et réalisation de sondeurs spatio-temporels
du canal à 1800 MHz- Mesures de propagation à intérieur et à
l’extérieur des bâtiments,“ Ph.D. thesis, University of Rennes 1-
France 2001.
[71] Robert D. Tingley and Kaveh Pahlavan, “Space-Time Measurement
of Indoor Radio Propagation” IEEE Trans on Instrumentation and
Measurement, vol. 50, No. 1, February 2001.
[72] Kainam Thomas Wong, and Michael D. Zoltowski, “Root-MUSIC-
Based Azimuth-ElevationAngle-of-Arrival Estimation with
Uniformly Spaced but Arbitrarily Oriented Velocity Hydrophones”
IEEE Trans. on Signal processing, VOL. 47, NO. 12, pp.3250-3260,
December 1999.
[73] Petr Tichavský, Kainam ThomasWong and Michael D. Zoltowski,
“Near-Field/Far-Field Azimuth and Elevation Angle Estimation
Using a Single vector Hydrophone” IEEE Trans. on Signal
processing, VOL. 49, NO. 11, pp.2498-2510, November 2001.
[74] J. Liang, D. Liu, X. Zeng, W. Wang, J. Zhang and H. Chen, “ Joint
azimuth- elivation estimation of mixed near- field and far- field
sources using two- stage separated steering vector- base algorithm”
Progress In Electromagnetics Research, Vol. 113, 1746, 2011.
[75] Pl Pillai, S.U. Kwon, B.H.,” Forward/backward spatial smoothing
techniques for coherent signal identification” IEEE Transactions on
109
Acoustics, Speech and Signal Processing,Vol.37, Issue 1, pp.8-15,
1999.
[76] D. Cabric and R. W. Brodersen, “Physical layer design issues unique
to cognitive radio systems” IEEE International Symposium on
Personal, Indoor and Mobile Radio Communications, pp 759-763,
Sept 2005.
[77] Z. Quan, S. Cui, H. V. Poor, and A. H. Sayed, “Collaborative
wideband sensing for cognitive radios” IEEE Signal Processing
Magazine, no. 6, Nov. 2008, pp. 60- 73.
[78] Ashish Pandharipande, Jean-Paul M. G. Linnartz, "Performance
analysis of primary user detection in a multiple antenna cognitive
radio" ICC 2007- IEEE International Conference on
Communications, vol. 30, no. 1, June 2007 pp. 6481- 6485.
[79] Neihart N. M., Roy S. and Allstot D. J., ”A Parallel, Multi-
Resolution Sensing Technique for Multiple antenna Cognitive
Radios” IEEE International Symposium on Circuits and Systems
2007, ISCAS 2007.
[80] H. Urkowitz, “Energy detection of unknown deterministic signals”
Proceedings of the IEEE, pp 523-531, Apr 1967.
[81] Zhuan Ye; Memik, G.; Grosspietsch, J. “Energy Detection Using
Estimated Noise Variance for Spectrum Sensing in Cognitive Radio
Networks” Wireless Communications and Networking Conference,
2008. WCNC 2008. IEEE Volume, April 2008, Page(s): 711- 716.
[82] Z. Quan, S. Cui, H. V. Poor, and A. H. Sayed, “Collaborative
wideband sensing for cognitive radios” IEEE Signal Processing
Magazine, no. 6, pp. 60.73, Nov. 2008
[83] J. Marcum, “A statistical theory of target detection by pulsed radar”
IEEE Transactions on Information Theory, pp 59-267, Apr 1960.
110
[84] Andrea Goldsmith, Wireless Communications, Cambridge University
Press, New York, NY, 2005.
[85] Pham Duy Phong and Vu Van Yem ”Joint signal parameters
estimation for advanced wireless positioning systems” Proceeding of
South East Asian Technical University Consortium (SEATUC),
Bangkok, Thailand, March 2012.





























