-
7/29/2019 LMI Based Stability Analysis
1/9
IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 19, NO. 3, JUNE 2011
505
LMI-Based Stability Analysis forFuzzy-Model-Based Control
Systems
Using Artificial TS Fuzzy ModelH. K. Lam, Senior Member,
IEEE
AbstractThis paper investigates the stability of
fuzzy-model-based (FMB) control systems. An alternative
stability-analysis ap-proach using an artificial fuzzy system based
on the Lyapunovstability theory is proposed. To facilitate the
stability analysis,the continuous membership functions of the
TakagiSugeno (TS)fuzzy model are represented by the staircase ones.
With the niceproperty of the staircase membership functions, it
turns the set ofinfinite number of linear-matrix-inequality (LMI)
based stabilityconditions into a finite one. Furthermore, the
staircase member-ship functions carrying system information can be
brought to the
stability conditions to relax the stability conditions. The
stability ofthe original FMB control systems is guaranteed by the
satisfactionof the LMI-based stability conditions. The proposed
stability anal-ysis is applied to the FMB control systems of which
the TS fuzzymodel and fuzzy controller do not share the same
premise mem-bership functions and, thus, is able to enhance the
design flexibilityof the fuzzy controller. A simulation example is
given to illustratethe merits of the proposed approach.
Index TermsFuzzy control, linear-matrix inequality
(LMI),stability analysis, staircase membership functions,
TakagiSugeno(TS) fuzzy model.
I. INTRODUCTION
FUZZY-MODEL-BASED (FMB) control [1] offers a sys-
tematic approach to deal with nonlinear control problems.
With the TakagiSugeno (TS) fuzzy model [2], [3], it offers a
general framework to represent the nonlinear system as an
aver-
age weighted sum of linear subsystems. The TS fuzzy model
exhibits a nice property to facilitate the stability analysis
and
control synthesis. A fuzzy controller was proposed in [4] and
[5]
to close the feedback loop of the nonlinear plant represented
by
the TS fuzzy model to form an FMB control system.
Stability is an essential issue for the FMB control systems.
It
has drawn the attention of the researchers in the
fuzzy-control
community for the past decades. The Lyapunov stability
theory
is the most-popular analysis tool to investigate the stability
ofthe FMB control systems. Basic stability conditions in the
form
of Lyapunov inequalities were reported in [4] and [5]. If
there
exists a solution to the stability conditions, the FMB
control
Manuscript received November 9, 2009; revised April 27, 2010 and
October25,2010; accepted January 5, 2011. Date of publication
February 17, 2011; dateof current version June 6, 2011. This work
was supported by the Kings CollegeLondon and by the Engineering and
Physical Sciences Research Council underProject EP/E05627X/1.
The author is with the Division of Engineering, Kings College
London,London, WC2R 2LS, U.K. (e-mail:
[email protected]).
Digital Object Identifier 10.1109/TFUZZ.2011.2116027
system is guaranteed to be asymptotically stable. As the
mem-
bership functions are not considered, the stability
conditions
achieved are very conservative. However, it allows the
member-
ship functions to be chosen freely for the fuzzy controller,
and
thus, enhances the controller-design flexibility. In [6][8],
the
same authors and other researchers proposed some approaches
to bring the boundary information of the membership
functions,
such as the lower and upper bounds of the membership func-
tions and/or their multiplications, to the stability analysis
forthis class of FMB control systems. As more information of
the
system nonlinearity is considered, more relaxed stability
con-
ditions can be obtained, compared with the work given in [4]
and [5].
The parallel-distribution-compensation (PDC) technique was
proposed in [9] for the design of fuzzy controller. It is
required
that the fuzzy controller share the same premise membership
functions as those of the TS fuzzy model. As some cross
terms
of membership functions of the FMB control system are in
common, they can be grouped in the stability analysis,
thereby
leading to more relaxed stability conditions. Further
relaxed
stability conditions were reported in [10][17] by utilizing
the
property of the fuzzy summations at different levels. As the
de-sign flexibility of the fuzzy controller under the PDC
vanishes
(i.e., the membership functions of the fuzzy controller are
not
allowed to be chosen freely but determined by the TS fuzzy
model), the implementation cost (i.e., the cost of
implementing
the fuzzy controller physically) will increase if the
membership
functions of the TS fuzzy model are complicated. The stabil-
ity conditions and the design of the fuzzy controller were
for-
mulated as a linearmatrix-inequality (LMI) problem [4][17].
The solution to the LMI-based stability conditions can be
found
numerically using convex-programming techniques [18]. By in-
corporating the boundary information of the membership func-
tions [19], [20], more relaxed stability conditions for the
FMBcontrol systems under the PDC can be obtained.
It should be noted that the stability conditions in [9][17]
contain no information about the membership functions of
the TS fuzzy model and the fuzzy controller. Once a fea-
sible solution is found, the stability of the FMB control
system is guaranteed for any shapes of membership functions.
Practically, a fuzzy controller should be designed for a
specified
nonlinear plant but not for a family. By considering the
nonlin-
ear plant to be controlled, the membership functions are
already
known, and it is a waste if we do not consider this
information
in the stability analysis. In this paper, we propose an
alterna-
tive stability-analysis approach to investigate the stability of
the
1063-6706/$26.00 2011 IEEE
-
7/29/2019 LMI Based Stability Analysis
2/9
506 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 19, NO. 3, JUNE
2011
FMB control systems (of which the TS fuzzy model and fuzzy
controller not sharing the same premise membership
functions)
with the consideration of the information of membership
func-
tions. As the membership functions are continuous in values,
the number of stability conditions will become infinite when
the membership functions are included. To circumvent the
dif-
ficulty, the staircase membership functions [21] are employedto
facilitate the stability analysis. We propose an artificial TS
fuzzy model, with the staircase membership functions replac-
ing the original ones to conduct the stability analysis. It
should
be noted that the artificial TS fuzzy model is a mathemati-
cal tool for stability analysis and not necessarily
implemented
physically. Stabilization of the artificial FMB control
system
(which is formed by the artificial TS fuzzy model and the
fuzzy controller connected in a closed loop) implies that of
the
original FMB control system (which is formed by the original
TS fuzzy model and the fuzzy controller). As the staircase
membership functions have finite number of levels, it leads to
a
finite number of stability conditions, even though the
staircase
membership functions are incorporated. The proposed
stabilityconditions are applied to the FMB control system that both
TS
fuzzy model and fuzzy controller do not share the same
premise
membership functions. It thus allows a greater design
flexibil-
ity for the fuzzy controller, and its implementation cost can
be
lowered by employing some simple membership functions.
This paper is organizedas follows.In Section II, theTS fuzzy
model and the fuzzy controller are briefly presented. In
Section
III, the stability of the FMB control systems is
investigated
through the artificial TS fuzzy model. Stability conditions
in
terms of LMIs are derived to guarantee the system stability
and synthesize the fuzzy controller. In Section IV, a
simulation
example is given to demonstrate the merits of the
proposedstability conditions. In Section V, a conclusion is
drawn.
II. TAKAGISUGENO FUZZY MODEL AND FUZZY CONTROLLER
WITH STAIRCASE MEMBERSHIP FUNCTIONS
The TS fuzzy model and the proposed fuzzy controller with
staircase membership functions are briefly presented in the
fol-
lowing.
A. TakagiSugeno Fuzzy Model
Letting p be the number of fuzzy rules describing the
nonlin-
ear plant. The ith rule is of the following format:
Rule i : IF f1 (x(t)) is Mi1 AND AND f (x(t)) is M
i
THEN x(t) = Aix(t) + Bi u(t) (1)
where Mi is a fuzzy term of rule i corresponding to the
knownfunction f (x(t)), = 1, 2, . . . , , i = 1, 2, . . . , p, isa
positive integer, Ai
nn and Bi n m are the known
constant system and input matrices, respectively, x(t) n isthe
system state vector, and u(t) m is the input vector. Thesystem
dynamics is described by
x(t) =
p
i=1
wi (x(t)) (Aix(t) + Biu(t)) (2)
wherep
i= 1
wi (x(t)) = 1, wi (x(t)) [0, 1] i (3)
wi (x(t)) =
Mi1
(f1 (x(t))) Mi2
(f2 (x(t))) Mi
(f (x(t)))pk =1
Mk1 (f1 (x(t)))Mk2 (f2 (x(t))) Mk
(f (x(t))
(4)
are the normalized grades of membership, and Mi (f (x(t)))are
the grades of membership corresponding to the fuzzy terms
Mi .
B. Fuzzy Controller With Staircase Membership Functions
A fuzzy controller with p fuzzy rules is to be designed for
the nonlinear plant. The jth rule of the fuzzy controller is of
the
following format:
Rulej : IF g1 (x(t)) is Nj1 AND . . . AND g (x(t)) is N
j
THENu(t) = Gjx(t) (5)
where Nj is a fuzzy term of rule j corresponding to the
knownfunction g(x(t)), = 1, 2, . . . , , j = 1, 2, . . . , p, is
apositive integer, and Gj
m n is the feedback gain of rule
j to be designed. The inferred output of the fuzzy controller
is
given by
u(t) =
p
j =1mj (x(t))Gjx(t) (6)
wherep
j = 1
mj (x(t)) = 1, mj (x(t)) [0, 1] j (7)
mj (x(t)) =
Nj1(g1 (x(t))) Nj2
(g2 (x(t))) Nj
(g (x(t)))pk =1
Nk1 (g1(x(t)))Nk2 (g2(x(t))) Nk
(g (x(t)))(8)
are the normalized grades of membership, and Nj(g(x(t)))
are the grades of membership corresponding to the fuzzy
terms
Nj. To facilitate the stability analysis, staircase
membershipfunctions are employed for the fuzzy controller and will
be
discussed later on.
It should be noted that the fuzzy controller with continuous
or
staircase membership functions is in the same form of (6).
When
mj (x(t)) is governed by a staircase function, the fuzzy
controller
becomes a staircase-membership-function fuzzy controller. By
sampling each state variable, we denote the sample state
vec-
tor as x(t). The grades of membership of the fuzzy
controllercorresponding to x(t), which is denoted as mj (x(t)), can
beobtained. The value ofmj (x(t)) is equal to mj (x(t)),
depend-
ing on the domain in which x(t) is lying. For example, let
us
-
7/29/2019 LMI Based Stability Analysis
3/9
LAM: LMI-BASED STABILITY ANALYSIS FOR FUZZY-MODEL-BASED CONTROL
SYSTEMS USING ARTIFICIAL TS FUZZY MODEL 507
consider mj (x1 (t)) depending on x1 (t) only and x1 (t)
beingsampled at 5, 4, . . . , 4, 5. For 4.5 < x1 (t) 5.5, we
havex1 (t) = 5, and mj (x1 (t)) = mj (x1 (t)) = mj (5). By this
way,the membership grades of the staircase membership functions
can be defined.
III. STABILITY ANALYSISIn this section, the stability of the FMB
control system, which
is formed by the TS fuzzy model (2) and the proposed fuzzy
controller (6) connected in a closed loop, is investigated.
From
(2) and (6), the FMB control system is obtained as follows:
x(t) =
pi=1
wi(x(t))
Aix(t)+Bi
p
j = 1
mj (x(t))Gjx(t)
=
pi=1
pj =1
wi (x(t))mj (x(t)) (Ai +BiGj )x(t). (9)
Remark 1: It was reported in [5] and [9] that the FMB con-trol
system (9) is guaranteed to be asymptotically stable if
there exists a symmetric positive-definite matrix P such
that
(Ai +BiGj )TP+P (Ai +BiGj ) < 0 for all i and j. As the
stability conditions are independent of the membership func-
tions wi (x(t)) and mj (x(t)), the membership functions mj
(x(t))are allowed to be chosen flexibly and lead to lower
implemen-
tation cost of the fuzzy controller when simple membership
functions are employed. However, the stability conditions
are
very conservative. When mi (x(t)) = wi (x(t)) for all i are
con-sidered (under the PDC design), various relaxed LMI-based
stability conditions can be found in [9][17]. If the
membership
functions of the TS fuzzy model wi (x(t)) are very complicatedin
structure, it will lead to a high implementation cost for the
fuzzy controller.
To facilitate the stability analysis of (9), the following
artifi-
cial FMB control system is proposed:
x(t) =
pi=1
pj =1
( wi (x(t)) + wi (x(t), x(t)))
mj (x(t)) (Ai +BiGj )x(t) Ce(t)
=
pi=1
pj =1
( wi (x(t)) + wi (x(t), x(t)))
mj (x(t)) (Ai +BiGj ) x(t)
+
pi=1
pj = 1
( wi (x(t)) + wi (x(t), x(t)))
mj (x(t)) (Ai +BiGj ) e(t) Ce(t) (10)
where x(t) n is the system state vector,e(t) = x(t) x(t),wi
(x(t)) is a staircase nonlinear function to be designed,wi (x(t),
x(t)) takes the scalar value either i or i at anyinstant, and C =
CT n n is a matrix to be determined.In the following, the matrix C
is determined in a way that
e(t) 0 as time t . As a result, x(t) x(t) as time t
can be achieved, and thus, the stability of the artificial
FMB
control system implies that of the original FMB control
system
(9).
Remark 2: Similar to the approach in Remark 1, we denote
the sample grades of membership of the TS fuzzy model as
wi (x(t)) corresponding to the sample state vector x(t).
Thevalue of wi (x(t)) is equal to wi (x(t)) depending on the
do-
main ofx
(t) lying in. For example, considering wi (x1 (t))depending on
x1 (t) only and x1 (t) being sampled at 5, 4,. . . , 4, 5. For 4.5
< x1 (t) 5.5, we have x1 (t) = 5. Thus,wi (x1 (t)) = wi (x1 (t))
= wi (5) is determined.
Remark 3: The artificial FMB control system (10) and the
staircase membership functions are mathematical tools to
facil-
itate the stability analysis of the original FMB control
system
(9). In order to show their advantages, two cases of FMB
control
systems with the continuous and staircase
membershipfunctions
are discussed in the following.
Case 1: Considering mj (x(t)) as ordinary membership func-
tions (continuous membership functions), the FMB control
system (9) has continuous membership grades, i.e., wi (x(t))
and mj (x(t)). By taking the Lyapunov functions as V(t)
=x(t)TPx(t), where P is a symmetric positive-definite matrix,along
the line of derivation in [5] and [9], the stability condition
governing the system stability of (9) is achieved as
=
pi= 1
pj = 1
wi (x(t))mj (x(t))
(Ai +BiGj )TP
+P (Ai +BiGj )
< 0.
With the consideration of the membership functions in the
stability analysis, it has to make sure that < 0 for all
val-ues of wi (x(t)) and mj (x(t)). Thus, the number of LMIs
be-comes infinite, and it is impractical to find the solution
nu-
merically. A workaround is given in [5] and [9]; from Remark
1, the system stability is guaranteed by (Ai +BiGj )TP +
P (Ai +BiGj ) < 0 for all i and j. When these stability
condi-tions are satisfied, < 0 holds. However, the stability
condi-tions are very conservative.
Case 2: We consider the FMB control systems with the stair-
case membership functions. For the FMB control system (10),
wi (x(t)) + wi (x(t), x(t)) and mj (x(t)) are both staircase
func-tions and take discrete values in a finite set. When e(t) 0
(asshown later on), the FMB control system (10) becomes
x(t) =
pi=1
pj =1
( wi (x(t)) + wi (x(t), x(t)))mj (x(t))
(Ai +BiGj )x(t).
As the membership functions are staircase and take discrete
values in a finite set, the stability of the FMB control
system
(10) is guaranteed by
pi= 1
pj =1
( wi (x(t)) + wi (x(t), x(t)))mj (x(t))mj (x(t))
(Ai +BiGj )TP+P(Ai +BiGj )
< 0
-
7/29/2019 LMI Based Stability Analysis
4/9
508 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 19, NO. 3, JUNE
2011
for all i, j, and all possible values ofwi (x(t)) + wi (x(t),
x(t))and mj (x(t)). Compared with the two sets of stability
conditions
considered in the two cases, in order to incorporate the
mem-
bership function to the stability conditions, the one in Case
1
has to consider all continuous values of wi (x(t)) and mj
(x(t))(i.e., infinite number of values). It is thus impractical to
find
the solution using convex-programming techniques. However,the
proposed one with staircase membership functions in Case
2 only needs to consider the discrete membership grades in a
finite set. Thus, a finite number of LMIs with the staircase
mem-
bership functions carrying the nonlinearity information of
the
plant can be obtained.
The stability analysis of the FMB control system (9) is in-
vestigated through the artificial FMB control system (10) in
the
following section. For brevity, wi (x(t)), mj (x(t)), wi (x(t)),
andwi (x(t), x(t)) are denoted as wi , mj , wi , and wi ,
respectively.The equality
pi=1 wi =
pj =1 mj =
pi= 1
pj = 1 wi mj = 1
given by the property of the membership functions is utilized
in
the following stability analysis. From (9) and (10), we
consider
the error system as follows:
e(t)= x(t) x(t)
=
pi= 1
pj =1
(wi wi wi ) mj (Ai +BiGj )x(t) +Ce(t).
(11)
Let us consider the following quadratic Lyapunov function
can-
didate:
V(t) = x(t)TP1 x(t) + e(t)TP2e(t) (12)
where 0 < P1 = PT1
nn , and 0 < P2 = PT2
n n . In
the following analysis, it will be shown that V(t) < 0 for
x(t)and e(t) (excluding x(t) = e(t) = 0), which implies the
asymp-totic stability of the systems (10) and (11), i.e., x(t) 0,
ande(t) 0 as time t . Once e(t) 0 is achieved, we havex(t) x(t),
which implies the asymptotic stability of the orig-
inal FMB control system (9), i.e., x(t) 0. The artificial
FMBcontrol system (10) is a mathematical tool to facilitate the
sta-bility analysis of the original FMB control system (9) using
the
property of the staircase membership functions. From (10) to
(12), we have (13), shown at the bottom of the page, where wi ,i
= 1, 2, . . . , p are the staircase functions designed such that|wi
wi | i , where i is a scalar. We choose
wi = i sgn
p
j = 1
mje(t)TP2 (Ai +BiGj )x(t)
(14)
where the sign function is defined as
sgn(z) =
1, z > 01, otherwise.
Remark 4: As the artificial FMB control system (10) is not
necessarily implemented, and to facilitate stability analysis
of
FMB control system (9) only, the complexity of wi and wi
de-fined in (14) will not complicate the physical implementation
of
the proposed fuzzy controller (6). Although the values of
some
matrices are unknown in (14) at the moment, it is
straightfor-
ward to see that wi takes the value of either i or I,
whichoffers enough information for the subsequent stability
analysis.
V(t) = x(t)TP1 x(t) + x(t)TP1 x(t) + e(t)
TP2e(t) + e(t)TP2 e(t)
=
pi=1
pj =1
( wi + wi )mj (Ai +BiGj ) x(t) +
pi= 1
pj = 1
( wi + wi )mj (Ai +BiGj ) e(t) Ce(t)
TP1 x(t)
+ x(t)TP1
pi=1
pj =1
( wi + wi )mj (Ai +BiGj ) x(t) +
pi=1
pj = 1
( wi + wi )mj (Ai +BiGj ) e(t) Ce(t)
+
p
i=1p
j =1(wi wi wi ) mj (Ai +BiGj )x(t) + Ce(t)
T
P2e(t)
+ e(t)TP2
p
i=1
pj =1
(wi wi wi ) mj (Ai +BiGj )x(t) + Ce(t)
=
pi= 1
pj =1
( wi + wi )mj x(t)T
(Ai +BiGj )
TP1
+P1 (Ai +BiGj )
x(t)+e(t)T
p
i=1
pj = 1
( wi + wi )mj (Ai +BiGj )T CT
P1 x(t)
+ x(t)TP1
p
i=1
pj = 1
( wi + wi )mj (Ai +BiGj ) C
e(t) + 2 p
i= 1
pj = 1
(wi wi wi ) mje(t)TP2 (Ai +BiGj )x(t)
+ e(t)T CTP2 +P2C e(t). (13)
-
7/29/2019 LMI Based Stability Analysis
5/9
LAM: LMI-BASED STABILITY ANALYSIS FOR FUZZY-MODEL-BASED CONTROL
SYSTEMS USING ARTIFICIAL TS FUZZY MODEL 509
From (14), the second-last term on the right-hand side of
(13)
becomes
p
i= 1
p
j =1
(wi wi wi ) mje(t)TP2 (Ai +BiGj )x(t)
pi= 1
i sgn
p
k =1
mke(t)TP2 (Ai +BiGk )x(t)
pj = 1
mje(t)TP2 (Ai +BiGj )x(t)
+
pi=1
|wi wi |
pj = 1
mje(t)TP2 (Ai +BiGj )x(t)
pi= 1
i
pj = 1
mje(t)TP2 (Ai +BiGj )x(t)
+
pi=1
|wi wi |
p
j = 1
mje(t)TP2 (Ai +BiGj )x(t)
=
pi= 1
(i + |wi wi |)
p
j = 1
mje(t)TP2 (Ai +BiGj )x(t)
0. (15)
From (13) and (15), let us denote X = P11 , z(t) = X1 x(t)
and z(t) = X1
e(t) and choose C = X1
, P2 = X1
> 0and Gj = NjX1 , where is a nonzero positive scalar,
and
Nj m n , j = 1, 2, . . . , p; we have (16), shown at the
bottom
of this page, where
( wi , wi , mj )
=
pi= 1
pj = 1
( wi + wi )mj
XATi +AiX
+BiNj +NT
j BTi
pi=1
pj = 1
( wi + wi )mjXATi +N
Tj B
Ti
+ I 2I
and the symbol denotes the transposed-matrix element at
the corresponding position.Remark 5: It can be seen from (16)
that V(t) 0 (i.e.,
equality holds when x(t) = z(t) = e(t) = e(t) = 0) is truewhen (
wi , wi , mj ) < 0, which implies the asymptotic sta-bility of
the artificial FMB control system (10) and the error
system (11), i.e., x(t) 0, and e(t) 0 as time t . As
V(t)
pi=1
pj = 1
( wi + wi )mj x(t)T ( (Ai +BiGj )
TP1 +P1 (Ai +BiGj ) ) x(t)
+ e(t)T p
i=1
p
j =1
( wi + wi )mj (Ai +BiGj )T CTP1 x(t)
+ x(t)TP1
p
i=1
pj = 1
( wi + wi )mj (Ai +BiGj ) C
e(t) + e(t)T CTP2 +P2C e(t)
=
pi=1
pj = 1
( wi + wi )mj x(t)TX1X
(Ai +BiGj )
TP1
+P1 (Ai +BiGj )
XX1 x(t)
+ e(t)TX1X
p
i= 1
pj = 1
( wi + wi )mj (Ai +BiGj )T +X1
X1 x(t)
+ x(t)TX1 p
i=1
pj =1
( wi + wi )mj (Ai +BiGj ) + X11
XX1e(t) e(t)T X1X1 + X1X1 e(t)
=
pi=1
pj = 1
( wi + wi )mjz(t)T
XATi +AiX
+BiNj +NT
j BTi
z(t) + z(t)T
p
i= 1
pj = 1
( wi + wi )mjXATi +N
Tj B
Ti
+ I
z(t)
+ z(t)T
p
i= 1
pj =1
( wi + wi )mj (AiX +BiNj ) + I
z(t) 2z(t)T z(t)
= z(t)z(t)
T
( wi , wi , mj ) z(t)z(t) (16)
-
7/29/2019 LMI Based Stability Analysis
6/9
510 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 19, NO. 3, JUNE
2011
e(t) = x(t) x(t), e(t) 0 leads to x(t) x(t). As a
result,considering both conditions x(t) 0, and x(t) x(t),
thisimplies the asymptotic stability of the FMB control system
of
(9), i.e., x(t) 0 as time t .The stability analysis results are
summarized in the following
theorem.
Theorem 1: The FMB control system (9), which is formed bya
nonlinear plant represented by the TS fuzzy model in the form
of (2) and the fuzzy controller in the form of (6) connected
in
a closed loop, is guaranteed to be asymptotically stable if
there
exist a nonzero positive scalar and matricesX = XT nn
and Nj m n , j = 1, 2, . . . , p, such that the following
LMIs
hold.
X > 0
> 0.
( wi (x(t)), wi (x(t), x(t)), mj (x(t))) < 0 for all finite
num-ber of discrete values ofwi (x(t)), wi (x(t), x(t)),and mj
(x(t)),
where wi (x(t), x(t)) takes the value of either i or iat any
instant, and i is a positive scalar. The functionswi (x(t)) and the
membership functions of the fuzzy controller(6), mj (x(t)), are
designed as staircase functions satisfying|wi (x(t)) wi (x(t))| i .
The feedback gains are defined asGj = NjX
1 for all j.
The proof of Theorem 1 follows immediately from
(12) and (16). From (12), it is required that P1 > 0and P2
> 0, leading to X > 0 with the considera-tion of X = P11 , P2
= X
1 > 0, and > 0. From (16), ( wi (x(t)), wi (x(t), x(t)),
mj (x(t))) < 0 is required to make
sure that V(t) < 0 (excluding x(t) = z(t) = e(t) = e(t) =
0).
Remark 6: It can be seen from the fuzzy controller (6) thatthe
staircase membership functions mj introduce discontinuity
to the control signal. Similar to the switching/sliding-mode
con-
trol [22], the system states are continuous but nonsmooth
due
to the integral action of the nonlinear plant (2). As a result,
con-
sidering the FMB control systems (9) and (10), although
there
exist switching components (i.e., sign function and
staircase
membership functions), it will not cause
discontinuity/jumping
in the system states x(t) and x(t) but will cause
nonsmoothness.Let us denote 1 , 2 , . . . , q, where q is an
integer, and 0 0 and V(t) < 0, it can be concluded that V(t) is
monotonicdecreasing. As a result, the stability of the FMB control
system
with staircase membership functions is guaranteed in the
sense
of Lyapunov.
Remark 7: Unlike some published work, the proposed sta-
bility analysis has a nice property for relaxing the
stability
conditions by considering the staircase membership functions
of both TS fuzzy model and fuzzy controller. It can be seen
that wi (x(t)), wi (x(t), x(t)), and mj (x(t)), which carry
the
nonlinearities of the plant and fuzzy controller, are
considered
and incorporated to the stability conditions in Theorem 1.
The
proposed stability conditions, however, suffer from the
follow-
ing two drawbacks. 1) The membership functions of the fuzzy
controller are required to be staircase. However, it may not
be
a problem as the staircase membership functions can be con-
structed based on their continuous ones. By rounding off the
inputs of the fuzzy controller to discrete level, the
continu-ous membership functions will become the staircase ones.
2)
The number of LMIs will become larger when the number of
discrete grades of membership is increasing, and thus, the
com-
putational demand required to find the solution to the
stability
conditions will be increased. As the nature of the TS fuzzy
model and fuzzy controller, this problem is difficult to
over-
come for the moment in the sense of theoretical development,
but can be alleviated by the advanced computing technology.
It
should be noted that the existing stability conditions
[12][17]
share the same drawback of high computational demand as
well.
Remark 8: The staircase function wi has to be chosen care-
fully to avoid wi + wi < 0. Referring to (16), it may lead
tono solution for the stability conditions in Theorem 1 due to
the
negative value of wi + wi in ( wi , wi , mj ) at a few
points,while the rest are positive.
Remark 9: In this paper, the stability of the FMB control
systems (9) with the TS fuzzy model and the fuzzy controller
not sharing the same membership functions, i.e., wi (x(t)) =mi
(x(t)) for all i, is investigated. The stability conditions in
[5]
and [9] can be applied to this class of FMB control systems,
while those in [9][17] cannot be applied. It has been shown
in [5] and [9] that the FMB control system in the form of
(9)
is guaranteed to be asymptotically stable if X = XT > 0
and
Qij = XAT
i +AiX +BiNj +NT
j BTi < 0 for all i and j. It
is shown below that if there exists a solution for the
stability
conditions in [5] and [9], i.e., X > 0 and Qij < 0 for all
i and j,it is also the solution for the stability conditions in
Theorem 1.
Rewriting ( wi , wi , mj ) as
pi= 1
pj =1
wi mjQij +
pi=1
pj =1
wi mjQij
pi= 1
pj =1
( wi + wi )mjXATi +N
Tj B
Ti
+ I 2I
and considering the solution of the stability conditions in
[5]
and [9] such that Qij < 0 for all i and j, it is obvious
thatpi= 1
pj = 1 wi mjQij < 0 as wi can be regarded as the sample
point of wi . In this case, ( wi , wi , mj ) < 0 can be
achievedby choosing a sufficiently small value of wi and a
sufficientlylarge nonzero positive value of . However, the solution
of thestability conditions in Theorem 1 may not be the solution
for
those in [5] and [9].
Let us consider the stability conditions in [9][17], which
require that the fuzzy controller and the TS fuzzy model
share the same premise membership functions, i.e., mi (x(t))
= wi (x(t)) for all i. If there exists a solution to the
sta-bility conditions in [9][17],
pi=1
pj =1 wi wjQij < 0,
andp
i= 1p
j = 1 wi wjQij < 0 are both true. Hence,
-
7/29/2019 LMI Based Stability Analysis
7/9
LAM: LMI-BASED STABILITY ANALYSIS FOR FUZZY-MODEL-BASED CONTROL
SYSTEMS USING ARTIFICIAL TS FUZZY MODEL 511
( wi , wi , mj ) can be written as (*), shown at the bottom of
thepage. ( wi , wi , mj ) < 0 can be achieved with the solution
ofthe stability conditions in [9][17]. If the value of wi is
chosento be sufficiently small, the magnitude ofmj wj is
sufficientlysmall by properly choosing the membership functions mj
and
the value of > 0 is sufficiently large. Hence, it can be
shown
that the solution of the stability conditions in [9][17] is
alsoa solution of the proposed stability conditions by choosing
the
membership functions with a sufficiently small discrete
level.
However, the solution of the proposed stability conditions
may
not be the solution for those in [9][17]. It will be shown later
on
through a simulation example that the proposed stability
con-
ditions are able to offer more relaxed stability analysis
results.
IV. SIMULATION EXAMPLE
An example is given in this section to illustrate the merits
of the proposed fuzzy-control approach. Let us consider the
following TS fuzzy model with three rules [16]:
Rule i : IF x1 (t) is Mi1
THEN x(t) = Aix(t) + Bi u(t), i = 1, 2, and 3
(17)
where
A1 =
1.59 7.290.01 0
A2 =
0.02 4.640.35 0.21
A3 =
a 4.330 0.05
, B1 =
10
, B2 =
80
B3 =
b + 61
, 2 a 12, and 2 < b < 50.
The membership functions of the TS fuzzy model are shown
in Fig. 1.
A three-rule fuzzy controller with staircase membership
func-
tions is employed to close the feedback loop. The continuous
membership functions are defined as m1 (x1 (t)) = 1 (1/1 +e(x 1
(t)+4) ), m2 (x1 (t)) = 1 m1 (x1 (t)) m3 (x1 (t)), andm3 (x3 (t)) =
1/1 + e
(x1 (t)4) , which are graphically shown
in Fig. 2. To obtain the staircase membership function, x1 (t)
is
sampled at interval of = 1. The staircase membership func-tions
are defined as mi (x1 (t)) = mi (h) for (h 0.5) < x1 (t)
Fig. 1. Membership functions of the fuzzy model. (Left triangle
in solid line)w1 (x1 (t)), (trapezoid in solid line) w2 (x1 (t)),
and (right triangle in solid line)w3 (x1 (t)). Staircase functions.
(Left dotted line) w1 (x1 (t)), (middle dashedline) w2 (x1 (t)),
and (right dashed-dotted line) w3 (x1 (t)).
Fig. 2. Membership functions of the fuzzy controller. (Left
solid line)m1 (x1 (t)), (middle solid line) m2 (x1 (t)), and (right
solid line) m3 (x1 (t)).Staircase membership functions. (Left
dotted line) m1 (x1 (t)), (middle dashedline) m2 (x1 (t)), and
(right dashed-dotted line) m3 (x1 (t)).
(h + 0.5), where i = 1, 2, and 3, and h = ,. . ., 10, 9,. . . ,
10, . . . , .
Based on this setting, the staircase functions wi (x1 (t))
(asshown in Fig. 1) and wi are chosen according to Remark 8. It
canbe checked that i = 0.0417 for all i satisfying the
conditions
pi=1
pj = 1
wi (mj + wj wj )Qij +
pi= 1
pj =1
wi mjQij
pi= 1
pj =1
( wi + wi )mjXATi +N
Tj B
Ti
+ I 2I
=
pi= 1
pj = 1
wi wjQij +
pi= 1
pj =1
wi (mj wj )Qij +
pi= 1
pj = 1
wi mjQij
p
i=1p
j =1( wi + wi )mj
XATi +N
Tj B
Ti
+ I 2I
. ()
-
7/29/2019 LMI Based Stability Analysis
8/9
512 IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 19, NO. 3, JUNE
2011
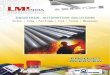
Fig. 3. Stabilization region of the stability conditions in
Theorem 1 with =1 (which is denoted by o) for the system parameters
2 a 12 and 2 b 50.
Fig. 4. Stabilization regions of the stability conditions in
Theorem 1 with = 0.5 (denoted by ) and = 0.25 (denoted by o),
respectively, for thesystem parameters 2 a 12 and 2 b 50.
of |wi (x1 (t)) wi (x1 (t))| i . The stability conditions
inTheorem 1 are employed to determine the stability of the FMB
control system with the help of MATLAB LMI toolbox, and
the stabilization region, as indicated by open circles (o),
is
shown in Fig. 3. Referring to Fig. 3, each circle indicates
that
there exists a feasible solution to the stability conditions
in
Theorem 1.
For comparison purposes, we employ the stability condi-
tions in [5] and [9], which can be applied to the case that
both
TS fuzzy model and fuzzy controller have different member-
ship functions, to determine the stabilization region.
However,
no. stabilization region can be found. Furthermore, the
stability
conditions in [6][8] for unmatched premise membership func-
tions, which consider the boundary information of the mem-
bership functions of the TS fuzzy model and fuzzy
controller,
are employed to determine the stabilization region; however,
no
stabilization region can be found. It should be noted that
since
the membership functions of both TS fuzzy model and fuzzy
controller considered in this simulation example are
different,
the stability conditions in [9][17] cannot be applied.
To show how the value of influences the stabilization re-gion
given by the proposed stability conditions, we choose as 0.5 and
0.25, such that we have i for all i as 0.0208 and0.0104,
respectively. Fig. 4 shows the stabilization regions for
both cases, which are indicated by for = 0.5 and o for= 0.25. It
can be seen that a larger stabilization region can beobtained for a
smaller value of .
V. CONCLUSION
The stability of the FMB control systems has been investi-
gated based on an artificial fuzzy system. A set of finite
number
of LMI-based stability conditions has been derived based on
the
Lyapunov stability theoryto replace theoriginal onewith
infinite
number of stability conditions. The proposed approach is
able
to bring the membership functions of both TS fuzzy model and
fuzzy controller to the stability conditions. The proposed
stabil-
ity conditions are applied to the FMB control systems with
TS
fuzzy model and fuzzy controller not sharing the same
premisemembership functions, thereby widening the applicability of
the
FMB control approach. A simulation example has been given
to illustrate the merits of the proposed approach.
REFERENCES
[1] G. Feng, A survey on analysis and design of model-based
fuzzy controlsystems, IEEETrans. Fuzzy Syst., vol. 14,no. 5,
pp.676697, Oct. 2006.
[2] T. Takagi and M. Sugeno, Fuzzy identification of systems and
its ap-plications to modeling and control, IEEE Trans. Sys., Man.,
Cybern.,vol. SMC-15, no. 1, pp. 116132, Jan. 1985.
[3] M. Sugeno and G. T. Kang, Structure identification of fuzzy
model,Fuzzy Sets Syst., vol. 28, pp. 1533, 1988.
[4] K. Tanaka and M. Sugeno, Stability analysis and design of
fuzzy control
systems, Fuzzy Sets Syst., vol. 45, pp. 135156, 1992.[5] C. L.
Chen, P. C. Chen, and C. K. Chen, Analysis and design of fuzzy
control system, Fuzzy Sets Syst., vol. 57, no. 2, 26, pp.
125140, Jul.1993.
[6] H. K. Lam and F. H. F. Leung, Stability analysis and
synthesis of fuzzycontrol systems subject to uncertain grades of
membership, IEEE Trans.Syst., Man, Cybern, B, Cybern., vol. 35, no.
6, pp. 13221325, Dec. 2005.
[7] H. K. Lam and M. Narimani, Stability analysis and
performance deignfor fuzzy-model-basedcontrolsystemunder
imperfectpremisematching,
IEEE Trans. Fuzzy Syst., vol. 17, no. 4, pp. 949961, Aug.
2009.[8] A. Sala and C. Arino, Extensions toStability analysis of
fuzzy control
systems subject to uncertain grades of membership, IEEE Trans.
Syst.,Man Cybern, B, Cybern., vol. 38, no. 2, pp. 558563, Apr.
2008.
[9] H. O. Wang, K. Tanaka, and M. F. Griffin, An approach to
fuzzy controlof nonlinear systems: stability and the design issues,
IEEE Trans. FuzzySyst., vol. 4, no. 1, pp. 1423, Feb. 1996.
[10] K. Tanaka,T. Ikeda,and H. O. Wang, Fuzzyregulatorand
fuzzyobserver:Relaxed stability conditions and LMI-based designs,
IEEE Trans. FuzzySyst., vol. 6, no. 2, pp. 250265, May 1998.
[11] W. J. Wang, S. F. Yan, and C. H. Chiu, Flexible stability
criteria fora linguistic fuzzy dynamic system, Fuzzy Sets Syst.,
vol. 105, no. 1,pp. 6380, Jul. 1999.
[12] E. Kim and H. Lee, New approaches to relaxed quadratic
stability con-ditions of fuzzy control systems, IEEE Trans. Fuzzy
Syst., vol. 8, no. 5,pp. 523534, Oct. 2000.
[13] X. Liu and Q. Zhang, New approaches to H controller designs
basedon fuzzy observers for TS fuzzy systems via LMI, Automatica,
vol. 39,no. 9, pp. 15711582, Sep. 2003.
[14] X. Liu and Q. Zhang, Approaches to quadratic stability
conditions andH control designs for TS fuzzy systems, IEEE Trans.
Fuzzy Syst.,vol. 11, no. 6, pp. 830839, Dec. 2003.
[15] M. C. M. Teixeira, E. Assuncao, and R. G. Avellar, On
relaxed LMI-based designs for fuzzy regulators and fuzzy observers,
IEEE Trans.
Fuzzy Syst., vol. 11, no. 5, pp. 613623, Oct. 2003.
-
7/29/2019 LMI Based Stability Analysis
9/9
LAM: LMI-BASED STABILITY ANALYSIS FOR FUZZY-MODEL-BASED CONTROL
SYSTEMS USING ARTIFICIAL TS FUZZY MODEL 513
[16] C. H. Fang, Y. S. Liu, S. W. Kau, L. Hong, and C. H. Lee, A
new LMI-based approach to relaxed quadratic stabilization of TS
fuzzy controlsystems, IEEE Trans. Fuzzy Syst., vol. 14, no. 3, pp.
386397, Jun.2006.
[17] A.SalaandC. Arino, Asymptotically necessary and sufficient
conditionsfor stability and performance in fuzzy control:
Applications of Polyastheorem, Fuzzy Sets Syst., vol. 151, no. 24,
pp. 26712686, Dec. 2007.
[18] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan,
Linear MatrixInequalities in Systems and Control Theory (SIAM
Studies in AppliedMathematics). Philadelphia, PA: SIAM, 1994.
[19] A. Sala and C. Arino, Relaxed stability and performance
conditions forTakagi- Sugeno fuzzy systems with knowledge on
membership-functionoverlap, IEEE Trans. Syst., Man, Cybern, B,
Cybern., vol. 37, no. 3,pp. 727732, Jun. 2007.
[20] M. Bernal, T. M. Guerra, and A. Kruszewski, A
membership-function-dependent approach for stability analysis and
controller synthesis ofTakagiSugeno models, Fuzzy Sets Syst., vol.
160, no. 19, pp. 27762795, Oct. 2009.
[21] H. K. Lamand M.Narimani, Quadratic stabilityanalysisof
fuzzy-model-based control systems using staircase membership
functions, IEEETrans. Fuzzy Syst., vol. 18, no. 1, pp. 125137, Feb.
2010.
[22] J. J.E. Slotine and W. Li, Applied Nonlinear Control.
Englewood Cliffs,NJ: Prentice-Hall, 1991.
H. K. Lam (M98SM10) received the B.Eng.(Hons.) and Ph.D. degrees
from the Department ofElectronic and Information Engineering, The
HongKong Polytechnic University, Hong Kong, in 1995and 2000,
respectively.
In 2000 and 2005, he was with the Department ofElectronic and
Information Engineering, The HongKong Polytechnic University, as a
Postdoctoral Fel-low and a Research Fellow, respectively. In 2005,
hebecame a Lecturer with the Kings College London,London, U.K. He
is the coeditor for two edited vol-
umes: Control of Chaotic Nonlinear Circuits (World Scientific,
2009) and theComputational Intelligence and its Applications (World
Scientific, 2011). He isthe coauthor of the bookStability Analysis
of Fuzzy-Model-Based Control Sys-tems (Springer, 2011). His current
research interests include intelligent controlsystems and
computational intelligence.
Dr. Lam is currently an Associate Editor of the IEEE
TRANSACTIONS ONFUZZY SYSTEMS and the International Journal of Fuzzy
Systems.

















![~V4 ffi~~~~~@ti~T~ ~~~~~(g~ ©©lMi]lMi]~[M[Q) …](https://img.pdfslide.us/doc/110x75/61cc5ca722583c59e2144e35/v4-ffitit-g-lmilmimq-.jpg)