-
Limit theorems for chain-binomialpopulation models
Phil Pollett
Department of MathematicsThe University of Queensland
http://www.maths.uq.edu.au/˜pkp
AUSTRALIAN RESEARCH COUNCILCentre of Excellence for
Mathematicsand Statistics of Complex Systems
-
Collaborators
Fionnuala BuckleyDepartment of MathematicsUniversity of
Queensland
∗Buckley, F.M. and Pollett, P.K. (2010) Limit theorems for
discrete-timemetapopulation models. Probability Surveys 7,
53-83.
-
Collaborators
Ross McVinishDepartment of MathematicsUniversity of
Queensland
∗McVinish, R. and Pollett, P.K. (2010) Limits of large
metapopulationswith patch dependent extinction probabilities.
Advances in Applied Prob-ability 42, 1172-1186.
-
Metapopulations
-
Metapopulations
Colonization
-
Metapopulations
-
Metapopulations
Local Extinction
-
Metapopulations
-
Metapopulations
-
Metapopulations
-
Metapopulations
-
Metapopulations
Total Extinction
-
Metapopulations
-
Metapopulations
-
Metapopulations
Colonization
from the mainland
-
Metapopulations
-
SPOM
A Stochastic Patch Occupancy Model (SPOM)
-
SPOM
A Stochastic Patch Occupancy Model (SPOM)
Suppose that there are n patches.
-
SPOM
A Stochastic Patch Occupancy Model (SPOM)
Suppose that there are n patches.
Let X(n)t = (X(n)1,t , . . . , X
(n)n,t ), where X
(n)i,t is a binary variable
indicating whether or not patch i is occupied.
-
SPOM
A Stochastic Patch Occupancy Model (SPOM)
Suppose that there are n patches.
Let X(n)t = (X(n)1,t , . . . , X
(n)n,t ), where X
(n)i,t is a binary variable
indicating whether or not patch i is occupied.
For each n, (X(n)t , t = 0, 1, . . . ) is assumed to be a
Markovchain.
-
SPOM
A Stochastic Patch Occupancy Model (SPOM)
Suppose that there are n patches.
Let X(n)t = (X(n)1,t , . . . , X
(n)n,t ), where X
(n)i,t is a binary variable
indicating whether or not patch i is occupied.
For each n, (X(n)t , t = 0, 1, . . . ) is assumed to be a
Markovchain.
Colonization and extinction happen in distinct,
successivephases.
-
SPOM - Phase structure
For many species the propensity for colonization and
localextinction is markedly different in different phases of
theirlife cycle.
-
SPOM - Phase structure
For many species the propensity for colonization and
localextinction is markedly different in different phases of
theirlife cycle. Examples:
The Vernal pool fairy shrimp (Branchinecta lynchi) and
the California linderiella (Linderiella occidentalis), both
listed under the Endangered Species Act (USA)
The Jasper Ridge population of Bay checkerspot
butterfly (Euphydryas editha bayensis), now extinct
-
SPOM - Phase structure
Colonization and extinction happen in distinct,
successivephases.
t− 1 t t+ 1 t+ 2
t− 1 t t+ 1 t+ 2
-
SPOM - Phase structure
Colonization and extinction happen in distinct,
successivephases.
t− 1 t t+ 1 t+ 2
We will we assume that the population is observed
aftersuccessive extinction phases (CE Model).
-
SPOM - Phase structure
Colonization and extinction happen in distinct,
successivephases.
Colonization: unoccupied patches become occupiedindependently
with probability c(n−1
∑n
i=1X(n)i,t ), where
c : [0, 1] → [0, 1] is continuous, increasing and concave.
-
Examples of c(x)
c(x) = cx, where c ∈ (0, 1] is the maximum
colonizationpotential.
-
Examples of c(x)
c(x) = cx, where c ∈ (0, 1] is the maximum
colonizationpotential.
c(x) = c, where c ∈ (0, 1] is a fixed
colonizationpotential—mainland colonization dominant.
-
Examples of c(x)
c(x) = cx, where c ∈ (0, 1] is the maximum
colonizationpotential.
c(x) = c, where c ∈ (0, 1] is a fixed
colonizationpotential—mainland colonization dominant.
c(x) = c0 + cx, where c0 + c ∈ (0, 1] (mainland and
islandcolonization).
-
Examples of c(x)
c(x) = cx, where c ∈ (0, 1] is the maximum
colonizationpotential.
c(x) = c, where c ∈ (0, 1] is a fixed
colonizationpotential—mainland colonization dominant.
c(x) = c0 + cx, where c0 + c ∈ (0, 1] (mainland and
islandcolonization).
c(x) = 1− exp(−xβ) (β > 0).
-
SPOM - Phase structure
Colonization and extinction happen in distinct,
successivephases.
Colonization: unoccupied patches become occupiedindependently
with probability c(n−1
∑n
i=1X(n)i,t ), where
c : [0, 1] → [0, 1] is continuous, increasing and concave.
-
SPOM - Phase structure
Colonization and extinction happen in distinct,
successivephases.
Colonization: unoccupied patches become occupiedindependently
with probability c(n−1
∑n
i=1X(n)i,t ), where
c : [0, 1] → [0, 1] is continuous, increasing and concave.
Extinction: occupied patch i remains occupiedindependently with
probability Si (random).
-
SPOM
Thus, we have a Chain Bernoulli structure:
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
SPOM
Thus, we have a Chain Bernoulli structure:
X(n)i,t+1
d= Bin
(
X(n)i,t +Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
SPOM
Thus, we have a Chain Bernoulli structure:
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
SPOM
Thus, we have a Chain Bernoulli structure:
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
SPOM
Thus, we have a Chain Bernoulli structure:
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0
c(x) = c(1130) = 0.7× 0.36̇ = 0.256̇
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 0 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 0 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0
0.60 0.56 0.63 0.62 0.52 0.61 0.68 0.49 0.49 0.49 0.500.41 0.59
0.63 0.60 0.61
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0
c(x) = c(1030) = 0.7× 0.3̇ = 0.23̇
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0C 0 0 1 0 1 0 0 1
1 1 0 1 0 0 1 0 1 1 1 1 1 1 0 0 0 0 0 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0C 0 0 1 0 1 0 0 1
1 1 0 1 0 0 1 0 1 1 1 1 1 1 0 0 0 0 0 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0C 0 0 1 0 1 0 0 1
1 1 0 1 0 0 1 0 1 1 1 1 1 1 0 0 0 0 0 0 1 0E 0 0 0 0 1 0 0 1 0 1 0
1 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0C 0 0 1 0 1 0 0 1
1 1 0 1 0 0 1 0 1 1 1 1 1 1 0 0 0 0 0 0 1 0E 0 0 0 0 1 0 0 1 0 1 0
1 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 1 0
-
SPOM
n = 30, Si ∼Beta(25.2, 19.8) (ESi = 0.56) and c(x) = 0.7x
0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 0 1 1 1 0 1 0 1 0 0 0 1 0 0 0C 1 0
0 0 1 1 1 1 0 1 0 1 0 0 0 0 1 1 1 1 1 1 1 0 0 0 1 0 1 0E 0 0 0 0 1
0 0 1 0 1 0 1 0 0 0 0 1 0 1 1 1 1 0 0 0 0 0 0 1 0C 0 0 1 0 1 0 0 1
1 1 0 1 0 0 1 0 1 1 1 1 1 1 0 0 0 0 0 0 1 0E 0 0 0 0 1 0 0 1 0 1 0
1 0 0 0 0 0 1 0 0 0 1 0 0 0 0 0 0 1 0...C 0 0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0E 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t +Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d=Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
SPOM - Homogeneous case
Compare this with the homogeneous case, where Si = s(non-random)
is the same for each i, and we merely countthe number N (n)t of
occupied patches at time t.
We have the following Chain Binomial structure:
N(n)t+1
d= Bin
(
N(n)t + Bin
(
n−N (n)t , c(
1nN
(n)t
)
)
, s)
-
A deterministic limit
Theorem [BP] If N (n)0 /np→ x0 (a constant), then
N(n)t /n
p→ xt, for all t ≥ 1,
with (xt) determined by xt+1 = f(xt), where
f(x) = s(x+ (1− x)c(x)).
[BP] Buckley, F.M. and Pollett, P.K. (2010) Limit theorems for
discrete-timemetapopulation models. Probability Surveys 7,
53-83.
-
Stability
xt+1 = f(xt), where f(x) = s(x+ (1− x)c(x)).
Stationarity : c(0) > 0. There is a unique fixed pointx∗ ∈
[0, 1]. It satisfies x∗ ∈ (0, 1) and is stable.Evanescence: c(0) =
0 and 1 + c ′(0) ≤ 1/s. Now 0 is theunique fixed point in [0, 1].
It is stable.
Quasi stationarity : c(0) = 0 and 1 + c ′(0) > 1/s. Thereare
two fixed points in [0, 1]: 0 (unstable) and x∗ ∈ (0,
1)(stable).
[Notice that if c(0) = 0, we require c ′(0) > 0 for
quasistationarity.]
-
CE Model - Evanescence
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
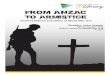
CE Model - Quasi stationarity
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s = 0.8, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
A Gaussian limit
Theorem [BP] Further suppose that c(x) is twicecontinuously
differentiable, and let
Z(n)t =
√n(N
(n)t /n− xt).
If Z(n)0d→ z0, then Z(n)• converges weakly to the Gaussian
Markov chain Z• defined by
Zt+1 = f′(xt)Zt + Et (Z0 = z0),
with (Et) independent and Et ∼ N(0, v(xt)), where
v(x) = s[
(1− s)x+ (1− x)c(x)(
1− sc(x))]
.
-
CE Model - Quasi stationarity
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s = 0.8, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
CE Model - Quasi stationarity
0 500 1000 1500 2000 2500 3000 3500 40000
10
20
30
40
50
60
70
80
90
100CE Model simulation (n =100, s =0.8, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
CE Model - Quasi-stationary distribution
0 500 1000 1500 2000 2500 3000 3500 40000
10
20
30
40
50
60
70
80
90
100CE Model simulation (n =100, s =0.8, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
CE Model - Gaussian approximation
0 500 1000 1500 2000 2500 3000 3500 40000
10
20
30
40
50
60
70
80
90
100CE Model simulation (n =100, s =0.8, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
Nx∗ = 64.2857
-
A deterministic limit
Returning to the general case, where patch survivalprobabilities
are random and patch dependent , and wekeep track of which patches
are occupied . . .
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
-
A deterministic limit
Returning to the general case, where patch survivalprobabilities
are random and patch dependent , and wekeep track of which patches
are occupied . . .
X(n)i,t+1
d= Bin
(
X(n)i,t + Bin
(
1−X(n)i,t , c(
1n
∑n
j=1X(n)j,t
)
)
, Si
)
First, . . .
Notation: If σ is a probability measure on [0, 1) and let
s̄kdenote its k-th moment, that is,
s̄k =∫ 1
0xkσ(dx).
-
A deterministic limit
Theorem Suppose there is a probability measure σ
anddeterministic sequence {d(0, k)} such that
1n
∑n
i=1 Ski
p→ s̄k and 1n∑n
i=1 Ski X
(n)i,0
p→ d(0, k)
for all k = 0, 1, . . . , T . Then, there is a
(deterministic)triangular array {d(t, k)} such that, for all t = 0,
1, . . . , T andk = 0, 1, . . . , T − t,
1n
∑n
i=1 Ski X
(n)i,t
p→ d(t, k),
where
d(t+ 1, k) = d(t, k + 1) + c (d(t, 0)) (s̄k+1 − d(t, k + 1))
.
-
A deterministic limit d(0,k)
0 1 2 3 T
t0
1
2
3
T
k
-
A deterministic limit d(1,k)
0 1 2 3 T
t0
1
2
3
T
k
-
A deterministic limit d(2,k)
0 1 2 3 T
t0
1
2
3
T
k
-
A deterministic limit d(3,k)
0 1 2 3 T
t0
1
2
3
T
k
-
A deterministic limit d(t,k)
0 1 2 3 T
t0
1
2
3
T
k
-
A deterministic limit d(t,0)
0 1 2 3 T
t0
1
2
3
T
k
-
Remarks
Typically, we are only interested in d(t, 0), being
theasymptotic proportion of occupied patches at time t:
1n
∑n
i=1X(n)i,t
p→ d(t, 0).
-
Remarks: d(t,0)
0 1 2 3 T
t0
1
2
3
T
k
-
Remarks: d(t,k)
0 1 2 3 T
t0
1
2
3
T
k
-
Remarks: d(t,0)
0 1 2 3 T
t0
1
2
3
T
k
-
Remarks
Typically, we are only interested in d(t, 0), being
theasymptotic proportion of occupied patches at time t:
1n
∑n
i=1X(n)i,t
p→ d(t, 0).
-
Remarks
Typically, we are only interested in d(t, 0), being
theasymptotic proportion of occupied patches at time t:
1n
∑n
i=1X(n)i,t
p→ d(t, 0).
However, we may still interpret the ratio d(t, k)/d(t, 0)(k ≥ 1)
as the k-th moment of the conditional distributionof the patch
survival probability given that the patch isoccupied. (From these
moments, the conditionaldistribution could then be
reconstructed.)
-
A deterministic limit
Theorem Suppose there is a probability measure σ
anddeterministic sequence {d(0, k)} such that
1n
∑n
i=1 Ski
p→ s̄k and 1n∑n
i=1 Ski X
(n)i,0
p→ d(0, k)
for all k = 0, 1, . . . , T . Then, there is a
(deterministic)triangular array {d(t, k)} such that, for all t = 0,
1, . . . , T andk = 0, 1, . . . , T − t,
1n
∑n
i=1 Ski X
(n)i,t
p→ d(t, k),
where
d(t+ 1, k) = d(t, k + 1) + c (d(t, 0)) (s̄k+1 − d(t, k + 1))
.
-
Homogeneous case
When s̄k = s̄k1 for all k, that is the patch
survivalprobabilities are the same, then it is possible to
simplify
d(t+ 1, k) = d(t, k + 1) + c (d(t, 0)) (s̄k+1 − d(t, k + 1))
.
We can show by induction that d(t, k) = s̄k1xt, where
xt+1 = s̄1 (xt + (1− xt) c(xt)) .
Compare this with the earlier [BP] result....
-
A deterministic limit
Theorem [BP] If N (n)0 /np→ x0 (a constant), then
N(n)t /n
p→ xt, for all t ≥ 1,
with (xt) determined by xt+1 = f(xt), where
f(x) = s(x+ (1− x)c(x)).
[BP] Buckley, F.M. and Pollett, P.K. (2010) Limit theorems for
discrete-timemetapopulation models. Probability Surveys 7,
53-83.
-
Stability
Theorem Any fixed point d = (d(0), d(1), . . . ) is given by
d(k) =∫ 1
0c(ψ)xk+1
1−x+c(ψ)xσ(dx),
where ψ (= d(0)) solves
R(ψ) =∫ 1
0c(ψ)x
1−x+c(ψ)xσ(dx) = ψ. (1)
If c(0) > 0, there is a unique ψ > 0. If c(0) = 0 and
c ′(0)∫ 1
0x
1−xσ(dx) ≤ 1,
then ψ = 0 is the unique solution to (1). Otherwise, (1) hastwo
solutions, one of which is ψ = 0.
-
Stability
Theorem If c(0) = 0 and
c ′(0)∫ 1
0x
1−xσ(dx) ≤ 1,
then d(k) ≡ 0 is a stable fixed point. Otherwise, thenon-zero
solution to
R(ψ) =∫ 1
0c(ψ)x
1−x+c(ψ)xσ(dx) = ψ
provides the stable fixed point through
d(k) =∫ 1
0c(ψ)xk+1
1−x+c(ψ)xσ(dx).
-
CE Model (homogeneous) - Evanescence
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
-
CE Model - Evanescence
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) =0.9383
0 0.5 10
2
4
6Beta(25.2,19.8)
-
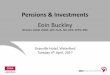
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) =1.2572
0 0.5 10
1
2
3Beta(4.368,3.432)
-
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) = ∞
0 0.5 10
0.5
1
1.5
2Beta(1.176,0.924)
-
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) = ∞
0 0.5 10
2
4
6
8Beta(0.784,0.616)
-
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) = ∞
0 0.5 10
10
20
30Beta(0.3304,0.2596)
-
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.56, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) = ∞
0 0.5 10
2
4
6
8Beta(0.784,0.616)
-
CE Model - Quasi stationarity
0 5 10 15 20 25 30 35 40 45 500
10
20
30
40
50
60
70
80
90
100CE Model simulation (n = 100, s1 = 0.6, c(x) = cx with c
=0.7)
t
Num
ber
ofocc
upie
dpatc
hes
c′(0)
∫1
0
x
1−xσ(dx) =2.1
0 0.5 10
0.5
1
1.5
2Beta(3,2)
CollaboratorsCollaboratorsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsMetapopulationsSPOMSPOMSPOMSPOMSPOMSPOM
- Phase structureSPOM - Phase structure
SPOM - Phase structureSPOM - Phase structureSPOM - Phase
structureExamples of $�oldsymbol {c} �oldsymbol {(} �oldsymbol {x}
�oldsymbol {)}$Examples of $�oldsymbol {c} �oldsymbol {(}
�oldsymbol {x} �oldsymbol {)}$Examples of $�oldsymbol {c}
�oldsymbol {(} �oldsymbol {x} �oldsymbol {)}$Examples of
$�oldsymbol {c} �oldsymbol {(} �oldsymbol {x} �oldsymbol {)}$
SPOM - Phase structureSPOM - Phase
structureSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOMSPOM
- Homogeneous caseSPOM - Homogeneous caseSPOM - Homogeneous
caseSPOM - Homogeneous caseSPOM - Homogeneous caseSPOM -
Homogeneous caseSPOM - Homogeneous caseA deterministic
limitStabilityCE Model - EvanescenceCE Model - Quasi stationarityA
Gaussian limitCE Model - Quasi stationarityCE Model - Quasi
stationarityCE Model - Quasi-stationary distributionCE Model -
Gaussian approximationA deterministic limitA deterministic
limit
A deterministic limitA deterministic limit $�oldsymbol
{d}�oldsymbol {(}�oldsymbol {0}�oldsymbol {,}�oldsymbol
{k}�oldsymbol {)}$A deterministic limit $�oldsymbol {d}�oldsymbol
{(}�oldsymbol {1}�oldsymbol {,}�oldsymbol {k}�oldsymbol {)}$A
deterministic limit $�oldsymbol {d}�oldsymbol {(}�oldsymbol
{2}�oldsymbol {,}�oldsymbol {k}�oldsymbol {)}$A deterministic limit
$�oldsymbol {d}�oldsymbol {(}�oldsymbol {3}�oldsymbol {,}�oldsymbol
{k}�oldsymbol {)}$A deterministic limit $�oldsymbol {d}�oldsymbol
{(}�oldsymbol {t}�oldsymbol {,}�oldsymbol {k}�oldsymbol {)}$A
deterministic limit $�oldsymbol {d}�oldsymbol {(}�oldsymbol
{t}�oldsymbol {,}�oldsymbol {0}�oldsymbol {)}$RemarksRemarks:
$�oldsymbol {d}�oldsymbol {(}�oldsymbol {t}�oldsymbol {,}�oldsymbol
{0}�oldsymbol {)}$Remarks: $�oldsymbol {d}�oldsymbol {(}�oldsymbol
{t}�oldsymbol {,}�oldsymbol {k}�oldsymbol {)}$Remarks: $�oldsymbol
{d}�oldsymbol {(}�oldsymbol {t}�oldsymbol {,}�oldsymbol
{0}�oldsymbol {)}$RemarksRemarksA deterministic limitHomogeneous
caseA deterministic limitStabilityStabilityCE Model (homogeneous)-
EvanescenceCE Model - EvanescenceCE Model - Quasi stationarityCE
Model - Quasi stationarityCE Model - Quasi stationarityCE Model -
Quasi stationarityCE Model - Quasi stationarityCE Model - Quasi
stationarity