Upload
wiestan
View
214
Download
1
Tags:
Embed Size (px)
DESCRIPTION
lewinski praca
Citation preview
BULLETIN OF THE POLISH ACADEMY OF SCIENCESTECHNICAL SCIENCES, Vol. 61, No. 1, 2013DOI: 10.2478/bpasts-2013-0002
CIVIL ENGINEERING
Topology optimization in structural mechanics
T. LEWISKI, S. CZARNECKI, G. DZIERANOWSKI, and T. SOK
Department of Structural Mechanics and Computer Aided Engineering, Institute of Building Engineering,Faculty of Civil Engineering, Warsaw University of Technology,
16 Armii Ludowej St., 00-637 Warszawa, Poland
Abstract. Optimization of structural topology, called briey: topology optimization, is a relatively new branch of structural optimization. Itsaim is to create optimal structures, instead of correcting the dimensions or changing the shapes of initial designs. For being able to createthe structure, one should have a possibility to handle the members of zero stiness or admit the material of singular constitutive properties,i.e. void. In the present paper, four fundamental problems of topology optimization are discussed: Michells structures, two-material layoutproblem in light of the relaxation by homogenization theory, optimal shape design and the free material design. Their features are disclosedby presenting results for selected problems concerning the same feasible domain, boundary conditions and applied loading. This discussionprovides a short introduction into current topics of topology optimization.
Key words: structural optimization, topology optimization, free material design, anisotropic elasticity, compliance minimization, minimumweight design, funicular structures, optimal design of frames.
1. Introduction
Consider the following four problems of optimal design withinlinear theories of bar structures, plates, shells and solids:
a) nd the lightest framework within a given feasible domaintransmitting a given loading (possibly a set of concentrat-ed forces) to a prescribed segment of the boundary suchthat the stresses arising are bounded by C (the limitcompression stress) and T (the limit tension stress). Thisproblem is referred to as (Pa);
b) assume that a body is to be constructed within a givendomain with prescribed loading applied at a given seg-ment of the boundary and possibly xed within a dierentboundary segment. Given two isotropic materials of Kelvinmoduli k and Kirchho moduli (here = 1, 2) suchthat k2 > k1 and 2 > 1, place them into a given do-main with given amounts (i.e. volumes) V1, V2 such thatV1+V2 = || and that thus constructed non-homogeneousbody is capable of transmitting the given loading to theprescribed segment of the boundary and it is less compli-ant than any other body composed of these two materials,subjected to the same conditions. Thus the layout of twomaterials, or the surface (contour) being the interface be-tween the materials is to be found. The compliance is un-derstood as the work done by the loading on the displace-ments of the loaded part of the boundary. This problem isreferred to as (Pb);
c) the problem is formulated as (Pb), but the weaker ma-terial degenerates now to a void, viz. k1 = 0, 1 = 0.Thus the layout problem concerns distribution of one ma-terial within the domain , whose volume is bigger thanthe volume V2 of the material to be placed. The openings
cannot appear on the loaded boundary, to keep the loadingunchanged. This problem is referred to as (Pc);
d) the problem is similar to (Pb) but the feasible domainshould be lled up with one elastic material of non-homogeneously distributed elastic moduli Cijkl(x) repre-senting arbitrary anisotropy, forming the tensor eld C(x),x being a point of the domain . Tensor C is subject to theconditions of positive deniteness and usual symmetry ofHookes tensor. One should impose a resource constrainton the distribution of C within . It is assumed that theintegral of (C) over is bounded, where (C) is anisotropic function. Among such anisotropic and inhomo-geneous bodies one seeks the least compliant body, satis-fying all the required conditions. This problem is referredto as (Pd).
Problems (Pa)-(Pd) may be modied in the following di-rections:
m1) by changing the merit function; e.g. in (Pa) one can re-quire that the compliance is minimized, while in (Pd)one can minimize a norm of the displacement eld;
m2) by taking new bounds on the design into account; it istypical to impose the point-wise conditions of an eec-tive stress (e.g. Hubers eective stress or the norm ofthe stress deviator);
m3) by admitting more than a single load; in the simplestextensions the merit function, here the compliance, isreplaced by the linear combination of compliances cor-responding to considered loads, under the condition oftheir independent application;
m4) by imposing constraints concerning partitioning (degreeof multi-connectedness) of the layout; e.g. in (Pc) one
e-mail: [email protected]
23
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
can x the maximal number of openings in the domain.In problem (Pb) we may additionally assume that themicrostructures which emerge have a given degree ofcomplexity or even a given shape, to make the compos-ite manufacturable;
m5) by admitting transmissible loads or the loads sensitiveto the boundary deformation.
The history of development of the methods constructed toattack the problems (Pa)-(Pd) is very interesting, as it accom-panies the progress of the following subjects:
structural mechanics, mechanics of deformable bodies, mechanics of composites and micromechanics, boundary value problems, control theory, linear algebra and tensor analysis, theory of homogenization for elliptic problems, theory of duality and theory of saddle-point problems.
Solutions to the problems (Pa)-(Pd) are applicable in var-ious branches of industry, e.g. in automobile or aircraft pro-duction, or in civil engineering. This subject has been dis-cussed in a great number of papers presented at biennialWorld Congresses of Structural and Multidisciplinary Opti-mization (WCSMO) which took place in Goslar (1995), Za-kopane (1997), Bualo (1999), Dalian (2001), Lido di Jesolo(2003), Rio de Janeiro (2005), Seoul (2007), Lisbon (2009)and Shizuoka (2011), the next to be held in Orlando (2013).The most important papers on this topic are regularly pub-lished in the Structural and Multidisciplinary Optimizationjournal.
Topology optimization has emerged in the paper by JamesClerk Maxwell [1], where several solutions to problem (Pa)have been constructed. In these solutions all members are sub-ject to stresses of uniform sign. This paper was an inspirationfor Anthony George Maldon Michell (18701959) who dis-covered a broader class of solutions to problem (Pa). Optimalstructures, called now Michell trusses, consist of bars, someof which can be in tension and some in compression, see [2].This remarkable paper was ahead of its time.
The rst correct formulations of problems (Pb) and (Pc)have been found in 1970s along with the progress in con-trol theory and homogenization theory, cf. historical remarksby Luc Tartar [3] on how to approach (Pb) and (Pc) cor-rectly. The most important results within the elasticity theoryare now available. They are published in the monographs byCherkaev [4] and Allaire [5], see also Lipton [6].
Historical remarks on the development of shape design problem (Pc) can be found in Sokoowski and Zolesio[7]. An important result is due to Wasiutyski [8]. An essen-tial method to detect, where a new hole should be created toimprove the design has been developed by Sokoowski andochowski [9], using the concept of the bubble method ofEschenauer et al. [10].
The problem (Pd) has been formulated and partly solvedin Bendse et al. [11]. Despite the recent progress done in
Haslinger et al. [12], Kocvara et al. [13], this eld of topolo-gy optimization is still in the stage of infancy.
A common feature of problems (Pa)-(Pd) is a neces-sity for the a priori reformulation by extending the designspaces. In this way, problems become well-posed. The above-mentioned extension means that:
in problem (Pa), one should admit pin-jointed frameworksof innite number of bars, because the sequence of vol-umes of sub-optimal solutions is decreasing as the numberof truss members increases,
in problems (Pb) and (Pc), the mixture of two materialsis admitted at the microstructural level, which leads to thecomposite-like solutions with anisotropic properties,
in problem (Pd), the discrete-continuous solutions shouldbe admitted, because this problem turns out to be governedby a minimization problem with the functional of the inte-grand of linear growth, as noted just recently in [14, 15].
The necessity of extension of the design space is not sur-prising, see comments in [35]. New solutions correspondingto extended design spaces are referred to as relaxed solutionsand the problems themselves become relaxed problems. Theyinvolve notions beyond the scope of the initial formulations.Thus the rst step in the process of solving any particularproblem falling into any class mentioned above is its refor-mulation to the relaxed form. This should precede any nu-merical calculations. The relaxation stage cannot be omittedwhich was not known until the middle of the 1980s. Due tothis fact, many incorrect pseudo-solutions had been publishedthus making the history of structural optimization extremelyquixotic.
The specic feature of topics discussed here is that classi-cal solutions in Michells sense had inspired the work of archi-tects and civil engineers: Wacaw Zalewski, Wojciech Zaboc-ki, Stanisaw Ku to mention the experts from Poland only see the book [16] and the papers [1720]. Although usedin practice, the Michell-like solutions cannot be explained byelementary methods; to understand them correctly one shouldresort to the papers written by contemporary mathematicians.
Some industrial applications of the extended solutions to(Pd)-like problems have only recently been proposed, sinceonly recently some techniques of controlling the microprop-erties of composites have been developed. One can say thatthe content of topology optimization lies in the triangle whosevertices are given by contemporary calculus of variations, ma-terials technology and the canons of modern architecture.
2. Problem (Pa) and related issues
2.1. On the solutions to Michells problem. Majority ofthese solutions concern the plane case. Assume that a certaintruss of n bars, capable of transmitting the given loading togiven support, can be treated as a good candidate for the sub-sequent optimization step. The specic property of problem(Pa) is that there exists a truss of m bars, m > n, lighterthan the previous truss of smaller number of bars. And thisprocess never stops. This property is implicitly present in the
24 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
original paper [2], but only the books by Cox [21], Hemp[22] and the reports and papers by A.S.L. Chan and H.S.Y.Chan cited therein established the underpinnings of the theoryfor the problem (Pa). Let us set the extended formulation ofproblem (Pa) in case of being two-dimensional. Assumethat the domain is reinforced by a bar in tension along Twhile the reinforcing bar along C is compressed. The set(,) consists of statically admissible pairs: (, F ) where is understood in the homogenized (averaged) meaning withI, II denoting the principal values of , and F stands forthe axial force in reinforcing bars. Volume of fully stressedMichell structure is expressed as follows
I(, F )=1
T
(|I|+|II|) dx+
T
|F | ds+
C
|F | ds
(1)
and = T /C . The stress-based formulation of the exten-sion of problem (Pa) reads
V = min{I(, F )
(, F ) (,)} . (PM )The information on the loading are concealed in the de-
nition of (,). The averaged eld has nothing to dowith the stress eld inside the microstructure, where the stressbounds C , T are attained. Let u stand for a kinematicallyadmissible displacement eld in ; (u) a symmetric partof u and set I, II for the principal strains. Let (u) de-note the axial strain. Next, introduce the sets the lockingloci, as they are named in the theory of locking bodies, [23,24], see also papers on rigid plastic bodies [25, 26]:
B ={ E2s
|I| 1, |II| } , = { R | 1} .
(2)
Write f (u) for the work of the loading on the eld u. Onecan prove that the problem dual to (PM ) reads
V = max{ 1T
f(u) (u(x)) B,
x , (u(s)) , s }.
(P M )
The equivalence of (PM ) and (P M ), discussed in [27, 28],is referred to as the Michell theorem. The problem (P M ) hasthe structure of the statics problem of a body with locking.Since the integrands in (PM ) are of linear growth, the stresselds should be sought in the space of measures, see [23].
A net of parametric lines along which I = 1, II = isreferred to as the Hencky net, since such nets are very well-known in the plasticity theory. The foundation of the theoryof the Hencky nets has been created by Caratheodory andSchmidt [29]; just there the analytical construction based onRiemanns method has been given, upon deriving the govern-ing equation of the net in the form of the hyperbolic equation:2 (, ) / = 0.
Detailed analysis of solutions to problems (PM ) and (P M )leads to the conclusion that the net of bars in optimal struc-tures coincides with the Hencky net in these regions wherethe bars are mutually orthogonal. The optimal solution can in-clude also the fan-like domains where the net is composed of
bars in one direction, as well as domains which are complete-ly empty. Each solution must be analyzed individually andcorresponding construction needs an individual approach.
Given the set of bars one can tackle the problem of com-puting the stress components and the axial forces F in thereinforcing bars (they exist in problems with point loads, toprevent the stress eld from being singular). These data suceto compute the volume of the lightest structure. Alternative-ly, the same volume can be found by using the dual formula(P M ) or by computing the virtual work done on the adjointdisplacement associated with the peculiar strain eld, beingthe maximizer of this problem. Equivalence of two resultsfound as described above is called the condition of zero dual-ity gap between (PM ) and (P M ). This equivalence conrmscorrectness of the particular solution. Although it is recom-mended to have such a check it is not easy to nd these veri-cations. The exceptions are: some most elementary problemssolved in Hemp [22], the cantilever designed in the exteriorof the circle [30] and the cantilevers designed in trapezoidaldomains [3136].
The majority of exact solutions to the Michell problemhave been found by guessing the geometry of the nets ofbars, this being the basis for checking statical admissibilitywith the given loading. Such a class of solutions under-pinned by the geometry of the Hencky nets is referred to asthe G class. However, other Michell structures exist, formingthe S class, in which the geometry of the net is determinedby the static equations, including the data on the loading. Animportant subclass of G are Michell cantilevers, transmittinga given point load to a given supporting line. Not every pointof such line is then used as a supporting hinge in this classof problems the position of supports is also unknown henceit has to be found via optimization! The cantilevers have a re-markable feature: the underlying net is stable with respect tosome changes of the load direction and, to some extent withrespect to the position of the load. One can say that optimalcantilever is cut out of the given net. For other directions ofloading, which are not admissible for this solution, the can-tilever disappears and the topology of optimal solution jumpstowards a completely dierent layout, sometimes reduced toone bar, see comments in [28, 3341].
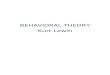
The S class is more complex and it is still not examinedin full detail. Consider a particular problem of transmittingtwo forces to two xed hinges. Two cases of symmetric po-sition of two point loads, for the case of T = C = p,are dealt with in Fig. 1. Depending on the position of theforces P the Hencky net changes its geometry. The problemcannot be separated into the geometric problem of the netconstruction and the static problem of nding the stresses.Analytical solutions in Figs. 1b) and 1c) have been found bySok and Lewiski in [40]. These solutions are characterizedby dierent topologies with a lower horizontal bar appearingin the latter layout to make the structure equilibrated. Bothstructures are statically determinate, despite the existence ofinnite number of bars in fan-like domains. The structure inFig. 1b) is geometrically unstable but the possible zero-energydeformation (in which bars are not subject to elongations) is
Bull. Pol. Ac.: Tech. 61(1) 2013 25
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
such that the points where loads are applied move horizon-tally. This in turn assures vanishing of the virtual work, thecondition of correctness of the equilibrium problem.
One can say that both solutions are taken from the half-plane in which virtual vector eld u is constructed as suchthat the corresponding principal strains are equal to 1/p inbi-directional fan-like domains and the strains are smaller inother directions. An optimal structure is imbedded into sucha eld, the idea of imbedding was originated by Maxwell [1].
a)
b)
c)
d)
e)
Fig. 1. The Michell problem: transmit two given forces to two xedhinges; feasible domain is the upper half of a plane (dashed line):a) problem setting; b) exact solution for the case of d = 0.5 l, after[40]; c) exact solution for d = 0.75 l, after [40]; d) and e) nu-merical solutions by T. Sok, for the ground structure composed of
approximately 125 million potential members
We note that the process of optimization of trusses extendsthe family of trusses to a broader one consisting of certain 2Dcontinuum bodies reinforced by boundary ribs. This extensionlinks the truss theory with the theory of plane stress. The re-sult also suggests that one should account for the theory ofdiscrete-continuous structures from the very beginning of theoptimization process. The specic feature of problem (Pa) isthat material constants are absent in the formulation. Con-sequently, optimal structures become statically determinate,because only then the stresses can be found directly fromequilibrium conditions.
Analytical solutions shown in Fig. 1b) and Fig. 1c) canbe conrmed by using the ground structure method, originallyproposed in Dorn et al. [42]. Problem (Pa) can be reduced tothe following remarkable form, very attractive from the nu-merical viewpoint, see Hemp [22], Achtziger [43], Pritchardet al. [44], Gilbert and Tyas [45], Tyas et al. [46], Sok [47]
min{
LTT +LTC BT (TC) = P,
T 0,C 0, T,C Rm} ,(Na)
where L is the column of bar lengths, B is the geometric ma-trix and P is the column of loads. Sok [47] has developed acomputer program (in Mathematica) based on the formulationabove. An access to the program is open, see [48]. This pro-gram makes it possible to approximate the analytical solutionof Michell problem with accuracy of a fraction of 0.1%. Forinstance, the numerical solution of Figs. 1d, e, used over 125million of possible bars and 20 thousand of nodes; the vol-ume of the optimal truss shown and the exact volume equalV = 3.77092 Pl/p and V = 4.64170! Pl/p, respectively.The truss constructed numerically is structurally unstable, butsuch solutions are admissible within the formulation (Na) inwhich no matrix is inverted, the equilibrium equations playingthe role of the subsidiary conditions.
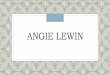
Since Michells solutions cannot be constructed algorith-mically, numerical predictions like that shown in Fig. 1d, areof essential importance: they inspire us to predict exact solu-tions. A check of correctness is obviously easier than the cre-ation of an exact layout. Let us now turn to a similar problemto that of Fig. 1, i.e. let us consider a bigger number of equalvertical forces, still applied along the line linking unmovablesupporting hinges. The feasible domain is still the top half-plane. Numerical solutions in Fig. 2b), 2c) and 2d), obtainedby T. Sok, were never published before (the available numer-ical solutions in McConnel [49] are much less accurate). Theydisclose the sequence of layouts tending to a very strange andcomplicated layout for the case of the vertical load uniformlydistributed between the supports. This numerical layout de-livers a strong suggestion of how the exact layout looks like,yet the latter is still unknown.
Only limited number of exact analytical solutions ofMichell class are available. The simplest problems have beenpublished by Cox [21] and Hemp [22], where important re-sults found by A.S.L. Chan and H.S.Y. Chan in the 1960s arealso reported, including the cantilever, transmitting a pointload to a straight segment of the line support. The cantileverwithin the exterior and interior of a circle have been found in
26 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
[30]. Cantilevers within trapezoidal domains have been dis-cussed in [28, 3136]. The cantilevers in the exterior of poly-gons were found in [37, 39], while the structures within L-shape domains were dealt with in [38] and [50]. The problemof transmitting a uniform load to the successive supports lo-cated at equal distances has been solved in [51]. The problemin Fig. 2d) for a uniform load has been partly solved in [46,52, 53]. The three forces problem has been solved partly in[40]; where also the related problem illustrated in Fig. 1 issolved. The problem similar to that of Fig. 1 with the feasi-ble domain being the full plane has been recently solved inSok and Rozvany [54]. The problem related to Fig. 1 butwith one roller has been solved in Sok and Lewiski [55,56] and Sok and Rozvany [54]. New Michells structuresfor dierent permissible stresses in tension and compressionwith taking into account the cost of supports have been putforward recently by Rozvany and Sok [57].
a)
b)
c)
d)
Fig. 2. The Michell problem: transmit given vertical forces to twoxed hinges; feasible domain is the upper half of a plane: a) numer-ical solution for three forces of magnitude P ; b) numerical solutionfor seven forces of magnitude P ; c) numerical solution for the caseof 199 forces of equal magnitude; d) magnied part of a structurenear the left support. Distances between forces are kept equal in each
example. All solutions found by T. Sok
The only spatial Michell type solution concerns the axi-symmetric torsion problem: nd the lightest fully stressedstructure between two co-axial rings subject to a torsionalloading. The proof that Michells solution is a grid-work inthe shape of a shell of revolution is unknown; we know onlythe proof that the spherical shell is the lightest among shellsof revolution in torsion, see [58].
Minimization in (Pa) leads to the lightest truss of minimalcompliance f (u) where u is the elastic solution, see Theorem2.7 in Achtziger [43]. Therefore, designing for least weight isin a certain sense equivalent to designing for maximal sti-ness.
The idea of imbedding a structure into a displacementeld, lying behind the (P M ) formulation, nds its applicationin topology optimization of trusses of nite number of bars.In the thesis by Bojczuk [59] a kinematic criterion is used inthe updating process.
Exact solutions of problem (Pa) help us in nding sub-optimal trusses satisfying the desired conditions with ap-propriate accuracy. Already William Prager noted some re-markable discrete analogies between geometric properties ofHencky nets and geometric properties of trusses of nite num-ber of members which mimick exact layouts, see [60, 61].Recent work by Mazurek et al. [62] follows this direction.
Other method is applied in Rychter and Musiuk [63],where the truss layouts are a priori assumed to be composedof rectangular cells.
2.2. Topology and geometry optimization of spatial truss-
es and frames of finite number of bars. Let us considera truss composed of m members and N nodes, subjected tothe conservative nodal forces Q RD. The problem of nd-ing node coordinates X RD (geometry optimization) andcross sections A Rm of members (topology optimization)for which nodal displacement vector q RD minimizes thetruss compliance Q q(A,X) under the condition of the trussvolume being smaller than a xed volume V is formulated asfollows
min(A,X)RmRN
{Q q(A,X)
K(A,X)q(A,X) = Q,A Amin,Xmin X Xmax,A L(X) V } .
(PT )
In a spatial truss, D = 3 N represents a total num-ber of degrees of freedom in a truss, K(A,X) represents itsstiness matrix, L(X) represents the vector of all bar lengths,Amin R
m, Xmin, Xmax RD respectively represent vectorsof feasible minimal cross sections, minimal left and maxi-mal right coordinates (box limitations). Elastic equilibriumequation for the geometrically non-linear case in the total La-grange formulation has the form K[A,X,q(A,X)]q(A,X)=Q.Dependence on the boundary conditions should be proper-ly taken into account in (PT ). The problem of designing thestiest space frame structure, constructed by straight bars witha given and xed number of joints and elements connectionscan be formulated similarly as in (PT ). Due to the dyadic formof a stiness matrix of a truss, formulae for the sensitivity
Bull. Pol. Ac.: Tech. 61(1) 2013 27
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
analysis can be easily derived by using well-known theoremsof the advanced calculus. The derivation of analytical formu-lae for all partial derivatives (. . . )/A and (. . . )/X for thespatial frame structure is more complicated, but still possiblebecause very ecient symbolic computation systems such ase.g. Maple Computer Algebra System, are available. Analyti-cal and symbolic formulae found with the help of Maple canbe next automatically converted into the code of the functionsin C or in Fortran language. Sensitivity formulae enable to im-plement any gradient oriented optimization algorithm, e.g. theMethod of Moving Asymptotes (MMA). Paper [64] discussesin detail many issues of the formulated above problem (PT )for geometrically linear and geometrically non-linear spatialtrusses. Papers [65, 66] present the problem of designing thestiest, geometrically linear spatial frame structure, togeth-er with the complete and analytical formulae of the sensitiveanalysis. Examples below show optimal layouts of few trussesand frames.
In the rst example, optimal topology and geometry of aground structure having a form of a cantilever truss is foundby MMA, see Fig. 3. The initial cross-sections are taken asequal to 1.963105 [m2]. Young modulus equals 200.0109
[Pa]. A single vertical force = 1.0104 [N] is applied at themiddle of the right side of a truss. The initial dimension of arepetitive quadratic cell is 1.0 [m]. Initial and optimal com-pliances in geometrically linear and non-linear cases are equalto 92.7, 14.4 and 14.5 [Nm], respectively.
Fig. 3. Geometry and topology optimization. Initial and optimal lay-outs are shown in upper and lower gures respectively. Solutions tothe geometrically linear and non-linear cases are illustrated in leftand right gures respectively. The results were obtained by S. Czar-
necki with help of the MMA method
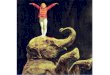
In the second example, optimal topology and geometryof the cylindrical latticed cantilever shell (radius of thecylinder = 1.0 [m]) is found, see Fig. 4. Nodes at the bot-tom side of the truss are xed. The horizontal unit forces =1.0 [kN] (along the horizontal axis at top view) are assumedto be placed at all nodes (sort of a simplied wind load mod-el). The initial compliance is equal to 8.3 [kNm] and the bestcompliance found by MMA is equal to 2.1 [kNm]. An opti-mal layout reminds, to some extent, the tulip-like shape of thehigh-rise, multi-storeyed building, taller than 200 m, proposedby W. Zalewski and W. Zabocki [1820] as a counterpart ofthe Michell-Hemp cantilever in three dimensions, (c.f. [67]).
a)
b)
c) d)
Fig. 4. Geometry and topology optimization of the cylindrical lat-ticed cantilever shell. Initial and optimal layout: a) top view, b) rightisometric view, c) front view, d) right view. The results were obtained
by S. Czarnecki with help of the MMA method
The optimal shape much more clearly motivates the tulip-like shape of the high-rise building proposed by W. Zalewskiand W. Zabocki if the number of design parameters is sig-nicantly reduced to a small number of variables deningthe horizontal positions of nodes represented by a vector X(vertical positions of nodes are assumed to be constant), e.g.to unknown Bernstein polynomials coecients dening themeridional shape of the axial symmetrical cylindrical latticedshell, see [68]. In the third example, see Fig. 5, a very simpli-ed truss model of a skyscraper is dened in such a way thatthe appropriate Cartesian pattern (similar as in the previousexample, but much denser), is projected onto a cylindrical lay-out of the latticed shell (envelope structure). Horizontal forcesare assumed to be placed at all top nodes while all bottomnodes are supported. Initial data: height = 185.0 [m] and ra-dius = 30 [m]. Area of each cross section and Young modulusof bars are equal to 0.1 [m2] and 1.0109 [N/m2], respective-ly. Value of each horizontal force placed at top node of the
28 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
cylinder equals 3.0103 [N]. Value of the radius of axial sym-metrical structure can change from 20 [m] to 50 [m]. Initialcompliance equals 240772 [Nm]. Optimal compliance equals235888 [Nm]. The initial and optimal shape of the latticedshell is shown in Fig. 5 (c.f. [68]). In this case, the optimalshape can clearly motivate the tulip-like shape of the high-risebuilding. The reduction of compliance (increase of stiness)is not as signicant as in case of classical plane Michell can-tilever (contrary to the previous example, only geometricaldesign was analysed and topological changes were not al-lowed) but the shape of a great deal of trees and many otherplants nearing cylindrical one suggests that its modicationsand improvement has signicantly limited range.
a) b)
Fig. 5. Geometry optimization. Simplied model of the initial patternof the cylindrical latticed shell: a) loading and supports, b) initial andoptimal shape. The results were obtained by S. Czarnecki in Ref. 67
a)
b)
c)
Fig. 6. Geometry and topology optimization of a spatial frame struc-ture modelling a shell-like ceiling. Initial and optimal layout: a) topview, b) front view, c) right isometric view. The results were obtained
by S. Czarnecki in Ref. 65
In the last example, fully optimal solution (topology andshape) was found for the geometrically linear, spatial framestructure modelling the shell-like ceiling, Fig. 6. The initialstructure has the shape of the at quadrilateral pattern com-posed of cylindrical bars shown in Fig. 6. Equal vertical forcesare placed at all nodes (simplied gravitational loading).
Let us note, that other interesting numerical layouts of op-timal spatial frameworks have been reported in Pritchard etal. [44].
2.3. Prager and Michell structures for transmissible loads.
Assume that the loading in a plane problem (Pa) is one-directional and can change its application points along thisdirection. Usually this direction is vertical, due to gravity. As-sume additionally that stresses in the structure are of uniformsign. Then the problem (Pa) is referred to as the WilliamPrager problem. Old results teach us that the solutions arefuniculars, or the arches (with hinges) of shapes y = f(x)proportional to the shape of the diagram of the bending mo-ment in the simply supported beam subjected to the same loadacting directly on the beam. Funicular structures are not bentand are not sheared across their sections; the axial force aloneis capable of assuring the equilibrium of any segment of thefunicular. Among all funiculars determined by a given load-ing, the lightest one is unique. It is called the Prager structure.Its rise is given by the formula
1
L
L0
(df
dx
)2dx = 1 + 2
(h
L
)2, (3)
where h stands for the vertical distance between the levelsof the supports and L denotes the span of the funicular. Thederivation of (3) from the formulation similar to (P M ) hasbeen given by Rozvany and Wang [69, 70]. The locking locusis here an innite domain due to the condition of the stressbeing of uniform sign. The elementary derivation of (3) canbe found in [71]. In case of vertical, uniform and transmissibleload, the Prager structure is the parabolic arch inscribed intothe equilateral triangle. Thus the Prager structures are funic-ulars of appropriate rise. A slight change of the formulation omitting the condition of all the bars being in compression(or tension) changes the Prager class of solutions to Michellclass (in which both tension and compression are allowed) butfor the transmissible loads. This change in formulation for theuniform transverse load problem changes the solution: fromthe parabolic arch to a highly complicated structure in whichthe arch is reinforced by a net of bars, some of them beinghangers for the vertical load; only the middle part of the struc-ture is represented by an arch, this new spectacular solutionhas been recently discovered by Tyas et al. [46]. The solutionis remarkable, since adding the bars in tension to the funicularin compression brings about a decrease in weight.
2.4. Prager-Rozvany grillages. The problem (Pa) can be re-formulated to the out-of-plane case if the loading is assumedperpendicular to the plane design domain, see the books byGeorge Rozvany [72, 73], the literature discussed there, es-
Bull. Pol. Ac.: Tech. 61(1) 2013 29
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
pecially the papers by Lowe and Melchers cited therein. Theprincipal stresses are then replaced by principal moments andthe axial force is replaced by the normal moment bending theedges along the ribs. A similar yet not identical formulation ofthe grillage problem can be inferred from the theory of relax-ation by homogenization of the minimal compliance problemof thin perforated plates with small volume, see [24].
2.5. Applications in civil engineering. The problem (Pa)is a typical problem for structural engineer: transmit a givenloading to given support in an optimal manner. A naive ap-proach to this problem is to assume that the design domainis lled up with an isotropic and homogeneous material, thento solve the elasticity problem and nally to nd the princi-pal stress trajectories. In case of steel structures to design asystem of bars which roughly follow the trajectories of stress.In case of reinforced concrete to design a truss and thena system of reinforced bars along the lines related to tensionand neglect the bars in compression by using the ability ofconcrete to resist it. The method described above is incorrect,since the trajectories of stress should refer to the optimizedstructure. An essential dierence between stress plots corre-sponding to bodies before and after optimization of materi-al properties is shown in Sec. 4. Contemporary progress intopology optimization makes it possible to re-formulate theprocess of design of the reinforced concrete structures, takinginto account the non-linear behaviour of concrete and tensionstiening eects, see Amir and Sigmund [74].
The Prager solutions (Sec. 2.3) are of fundamental im-portance for designing roofs and girders to cover large spans,since such structures should be simultaneously sti and light.One can say that the whole book by Zalewski and Allen [16]is devoted to the problem of how to cover the large span andthis problem is mainly solved with using funiculars, if self-weight prevails.
Designing of high-rise buildings needs other optimizationtools and other concepts. The area of the support is relativelysmall, its high prize suggests tulip-like shapes, as those pro-posed by Zalewski and Zabocki [1820]. The wind loadingbecomes an important factor, it determines the shape in space.Since Michells cantilevers xed on small support areas aretulip-like to resist the lateral loading, just these shapes appearin Refs [1820].
Exact solutions to problems (Pa) had inspired engineers inthe past and will inspire them in the future to nd a compro-mise between weight and stiness of a structure. Numerousapplications are given in Ku and Zalewski [17]. Fantasticbuildings have been recently designed by the architects andengineers from SOM LLP. They are inspired by topology op-timization solutions and by Michells trusses in particular, see[75, 76].
3. Problems (Pb) and (Pc) and related issues
3.1. Two-material problem and generalized shape design.
Consider a sequence of partitions of given domain intotwo subdomains 1, 2, occupied by materials 1 and 2,
respectively. Assume that the compliance corresponding toeach partition in a sequence is smaller than the one relatedto the previous division of . Numerical tests show that sub-sequent partitioning leads to the decrease of compliance. Inother words, the process of consecutive partitioning, drivenby the need to decrease the compliance, never stops. This ex-periment suggests that an inhomogeneous body composed oftwo materials is not the most compliant one but this role isplayed by a composite of certain microstructure. At each pointx of one can reveal a representative volume element (RVE)with a clear-cut partition into both constituents. Therefore, theproblem of compliance minimization must be a priori refor-mulated to its relaxed setting, in this way admitting two-phasecomposites as possible solutions from the very beginning ofan optimization process. Explicit formulation of this relaxedproblem in 2D in the context of linear elasticity has beenfound in the 1980s. Detailed lecture on this topic is providedin the books by Cherkaev [4] and Allaire [5]. All details con-cerning the thin plate optimization can be found in Lewiskiand Telega [77], Lewiski [78] and Dzieranowski [79, 80].The relaxed 2D problem of minimal compliance for the linearelasticity case reduces to
min
{J(m2)
m2 L (, [0, 1]) ,
m2 (x) dx = V2
,(P1,2)
J(m2) = min
2W (,m2) dx
() , (4)
where () represents the set of statically admissible tensorelds, while the potential W (,m2) is a given, explicitlydened isotropic function of the rst argument and a rationalfunction of the second argument. Its denition can be foundin [7779]. Scalar m2 represents density of material 2.
Let us stress here the following: reformulation of (Pb)into the form (P1,2) is a great success of many experts en-gaged in the homogenization theory, optimum design and thecontrol theory. Potential W (,m2) conveys the informa-tion on the underlying microstructure. There are many mi-crostructures leading to this potential, the simplest amongthem are in-plane laminates of 1st and 2nd rank, seeCherkaev [4]. Loosely speaking, W (,m2) is dened bythree functions, depending on the value of stress invariant = |(I II) / (I + II)| in three domains [0, 2], [2, 1],(1,). Here 2, 1 denote the material parameters dependingon m2, k2, k1, 2, 1, see [4]. The process of optimizationleads to the division of into three subdomains in which belongs to [0, 2], or [2, 1], or (1,). Interfaces betweensubdomains correspond to = 1 or = 2. These above-mentioned ranges for are referred to as regimes, as proposedin [4]. In each regime, the underlying optimal microstructureis dierent, but
30 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
the passage between regimes is smooth, trajectories of stress and strain coincide everywhere in , optimal microstructures are orthotropic as are the Henckynets in problem (Pa),
microstructural orthotropy does not contradict isotropy ofthe potentialW (,m2) with respect to the rst argument.
Remark 3.1. The problem (P1,2) allows for the passage to thelimit: k1 0, 1 0, which means that resulting compos-ite is a porous medium whose solid fraction is characterizedby moduli k2, 2. The majority of papers on topology opti-mization refers to the problem of optimal distribution of onematerial within the given domain to achieve minimal com-pliance of a structure. This problem is denoted (P0,2) in thesequel and it is referred to as generalized shape design. Insteadof m2 we write = m2. Potential W (,m2) simplies tothe form
2W (, ) = 2W 0 ()G () +1
G (), (5)
where
2W 0 () =1
E2
(2I +
2II 22III
),
G () =1
E2(|I|+ |II|)
2
(6)
and E2, 2 respectively denote the Young modulus and thePoisson ratio of material 2.
Remark 3.2. If the volume V2 tends to zero, (P0,2) reducesto the problem which is very similar to (PM ) since the un-derlined element in (5) is a dominating term, see Sec. 4.2.3in Allaire [5]. Thus we expect that solutions to (P0,2) withsmall value of V2/ || have a skeletal structure.
Solutions to problem (P1,2) involve composite domains,hence are dicult to manufacture. Thus many authors havedeveloped numerical schemes to penalize composite areas ina structure thus forcing the density to be equal either to 0or to 1; these techniques are discussed in [8183] and the pa-pers cited therein. The most popular technique to penalize thecomposite domains in problems (P0,2) is called SIMP (SolidIsotropic Material with Penalization), cf. Bendse [84] andZhou and Rozvany [85]. Phrase Isotropic Material is a partof an acronym hence the penalization factor p in E () =pE2 needs to satisfy p max (2/(1 2), 4/(1 + 2)), ifSIMP is to be used for mimicking the constitutive behavioursof a solid-void isotropic composite in two-dimensional elas-ticity framework, see [84]. Authors try to obtain an agreementbetween numerical results and skeletal-like solution to (Pa),which is justied due to Remarks 3.1 and 3.2. Thus the SIMPapproximation of the potential W (, ) in problem (P0,2)reads
W SIMP (, ) =1
pW 0 () . (7)
As an alternative to the heuristic scheme provided bySIMP, a dierent solid-void material model with penaliza-
tion may be derived directly from (5) by smoothing the ex-pression for the energy potential. Consequently, one obtains atwo-parameter family of functions approximating W (, ).Details of this approach were proposed by Dzieranowski,see [86]. The simplest, one-parameter formula in the above-mentioned family reads
W GRAMP (, ) =W
0 () +(1 + q)(1 )
2E2
(2I +
2II
),
(8)
where GRAMP stands for Generalized Rational Approxi-mation of Material Properties as it is shown in [86] that(8) justies and generalizes the RAMP scheme of Stolpe andSvanberg, see [87]. In the GRAMP scheme it is assumed thatq 3 to assure isotropy of the material. Comparison of vari-ous solid-void interpolation models shows that GRAMP pro-vides better accuracy of approximation of the exact solutionto (P0,2), especially for auxetic materials, see the discussionin [86].
Let us come back to the problem illustrated in Fig. 1a. Weadmit loading, supports and feasible domain as in Sec. 2, butthe problem is formulated now as (P0,2) or by using either ofthe approximations: SIMP, see (7), or GRAMP, see (8). Posi-tion of forces are assumed as in Fig. 1b, viz. d/l = 0.5 or asin Fig. 1c, i.e. d/l = 0.75. Computations were performed forthe isoperimetric condition in the form: V2/ || = 0.1. Plotsof the density , predicted by (P0,2), SIMP or GRAMP areshown in Fig. 7.
a) d)
b) e)
c) f)
Fig. 7. The problem illustrated in Fig. 1a in the (P0,2) setting. Plotsof the material density based on exact solution to (P0,2) and ap-proximate 0-1 topologies provided by SIMP and GRAMP models:a) d = 0.5l exact; b) d = 0.5l SIMP; c) d = 0.5l GRAMP; d)d = 0.75l exact; e) d = 0.75l SIMP, f) d = 0.75l GRAMP.
All results obtained by G. Dzieranowski
Plane design area was discretized by the Q1 ele-ments, i.e. 4-node square nite elements with bi-linear shapefunctions. The number of elements was equal to 68000.
Bull. Pol. Ac.: Tech. 61(1) 2013 31
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
Homogenization-based solution of problem (P0,2) was ob-tained with help of numerical integration scheme with 4 in-tegration points in each element. These points were also usedto calculate updated values of material density. In this way,numerical instability known as the checkerboard eect, seeSigmund and Petersson [88] was signicantly reduced. TheSIMP- and GRAMP-based solutions were obtained on thesame 68000 Q1 element mesh but the updated values of thematerial distribution eld were calculated in the middle ofeach element. In order to avoid the checkerboard instabilityand to obtain the manufacturable, albeit sub-optimal, solutionthe density lter was applied, see Bourdin [89].
Alternative SIMP versions have been proposed by Ku-tyowski [90].
Remark 3.3. The relaxation by homogenization method tomake the problem (P1,2) well-posed can also be applied forthin plate optimization [7779, 91], sandwich plates optimiza-tion [92], see also Studziski et al. [93] and Daz et al. [94]and shallow shells [7779, 95], see also Krog and Olho [96].Most of the homogenization formulae for plates and shells canbe found in [77].
Remark 3.4. The most important theorems on problems (Pb),(Pc) in the 3D setting can be found in Cherkaev [4] and Al-laire [5]. In particular, one can prove that optimal microstruc-tures are orthotropic and take a form of a rank-3 laminate.Numerical methods have been developed in Allaire et al. [97],Borrvall and Petersson [98] and in [99].
3.2. On the shape design. The method of relaxation dis-cussed in Sec. 3.1 predicts composite materials in optimalsolutions. In case of one-material optimal distribution, the re-laxed form a problem admits porous designs, and such designsindeed appear, as shown in Fig. 7. Yet the shape design prob-lem can be formulated in a dierent manner. One can assumethat the design domain preserves the index of connectedness.Consequently, no small voids appear in the solution and it isnot necessary to look for the generalized shape design. Con-ventional methods of shape design can be found in Pironneau[100]. They are based on the sensitivity results, see Sokoows-ki and Zolesio [7]. In problem (Pc), where the shape is un-known, the necessary condition of optimality says that thedensity of energy is constant along the boundary. This condi-tion can be linked with the name of Wasiutyski, see [8]. In2D problems it means that the hoop stress is constant alongthe contour of optimal shape, and this feature is valid alsoalong the contour of optimally shaped openings. Eective nu-merical schemes in 3D shape optimization with applicationsto biomechanics, developed by Nowak [101], was based onthis observation.
Classical shape optimization methods and sensitivity the-ory were unable to improve the solution by changing topolo-gy, viz. by introducing an opening. This task is now possibleto tackle by the topological derivative method, developed bySokoowski and ochowski [9]. The method is closely relatedto some techniques developed in mechanics of composites, asdiscussed in [102].
4. On free material design (FMD)
problem (Pd)
Let the design domain be plane. If u is a solution associatedwith given distribution of moduli represented by tensor eldC(x), then
(C) = f(u (C)), (9)
denotes the compliance treated as a function of C. Letf = ||
1
fdx. Let E0 be a reference Youngs modu-
lus. We consider distributions of C within the domain suchthat
(C) = E0, (10)
where (C) is an isotropic function of nonnegative val-ues. We thus assume (C) = (C)p, p 1, where = (1, 2, 3) stand for the eigenvalues of C, called Kelvinmoduli. Let us note that
a) p = 1; (C) = tr C,
(C) = 1 + 2 + 3,(11)
b) p = 2;
(C) = (CC)1/2
,
(C) =((1)
2 + (2)2 + (3)
2)1/2
.
(12)
The version of FMD with p = 1 is referred to as FMDwith trace constraint.
Let H() be the space of admissible Hooke tensors Cdened in given domain. Consider the following problem:
Yp = min { (C) |C H () , (C) = E0 } . (13)
One can prove that for p = 1, see [15, 103]
Y1 =1
||E0(Z1)
2 ,
Z1 = min
dx
() .
(14)
Let = pi stand for the minimizer of the latter problem.The optimal Hooke tensor C is expressed by this minimizeras follows
C = E0pi
pipi pi,
pi =1
pipi, 1 = E0
pi
pi.
(15)
Thus two of the optimal Kelvin moduli vanish; the mater-ial is optimally adjusted to a given loading, and stinesses or-thogonal to the loading disappear as they are redundant. Theproblem (14) has an important common feature with prob-lem (PM ) in both cases the integrand is of linear growth.Thus this problem can also be interpreted as the locking prob-lem. The minimizer = pi determines not only the compo-nents of C but also the trajectories of the stress state. Note
32 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
that material moduli do not appear in (14); trajectories of = pi are determined by the loading, the domain and thesupport.
The problem (13) for p = 1, 2 was introduced in Bendseet al. [11]; the theorem on correctness of this problem wasgiven in Haslinger et al. [12]. Numerical methods based onthe strain-based formulation (not shown here) were developede.g. in Kocvara et al. [13]. The result (14) is new. It wasreported in [15], and published in [103] in full detail. Gen-eralization of the results to the case of two loads appliednon-simultaneously can also be found in [15], while [104]and [105] provide a discussion of the problem in the context
of thin plates subjected to simultaneous bending and in-planeloading.
Consider now the problem illustrated in Fig. 1 within thesetting of FMD with trace constraint. A numerical solution tothe problem (14) has been found by constructing the represen-tation of the solution to the equilibrium problem ().The procedure starts from an underdetermined system of equi-librium equations, the solution of which is then represented bythe SVD decomposition, see Press et al. [106]. Design vari-ables which appear in this representation are not constrained.They are determined by the minimization procedure hence onecan say that a certain version of the force method is applied.
a)
b)
c)
Fig. 8. Problem illustrated in Fig. 1a. Case of d = 0.5l solution of the FMD problem with trace constraint: a) scatter plots (left) andcontours (right) of the Kelvin modulus 1; b) contour plots of the maximal (left) and minimal (right) principal stresses corresponding tothe optimal, non-homogeneous, anisotropic distribution of material properties; c) contour plots of the maximal (left) and minimal (right)principal stresses corresponding to the non-optimal, homogeneous, isotropic body satisfying the same isoperimetric condition. All results
obtained by S. Czarnecki
Bull. Pol. Ac.: Tech. 61(1) 2013 33
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
a)
b)
c)
Fig. 9. Problem illustrated in Fig. 1a. Case of d = 0.75l solution of the FMD problem with trace constraint: a) scatter plots (left) andcontours (right) of the Kelvin modulus 1; b) contour plots of the maximal (left) and minimal (right) principal stresses corresponding tothe optimal, non-homogeneous, anisotropic distribution of material properties; c) contour plots of the maximal (left) and minimal (right)principal stresses corresponding to the non-optimal, homogeneous, isotropic body satisfying the same isoperimetric condition. All results
obtained by S. Czarnecki
5. Final remarks
Topology optimization provides certain methods of control-ling microstructures and structural shape to make the materialand geometric characteristics ideally adjusted to given load-ing. Multiple load case can be also considered, the easiestway is to treat the loading cases separately and minimize aweighted sum of corresponding compliances. Thus obtainedsolutions are not as clear as those related to the single loadcase.
Solutions to topology optimization problems should befurther improved to full other design requirements, some ofthem refer to the stress level. In case of thin structures, localand global stability conditions should be satised by appro-priate stiening of the initial design.
The present review does not cover the evolutionary meth-ods developed for the topology optimization problems. In this
respect, the reader is referred to recent articles published inthe Bulletin of the Polish Academy of Sciences, Technical Sci-ences, 60(2), 2012, and references therein, see e.g. papers byDugosz and Burczyski [107], Mrzygd [108] or Szczepanikand Burczyski [109].
Acknowledgements. The paper was prepared within the Re-search Grant no N506 071338, nanced by the Polish Min-istry of Science and Higher Education, entitled: Topology Op-timization of Engineering Structures. Simultaneous shapingand local material properties determination.
REFERENCES
[1] C. Maxwell, On reciprocal gures, frames and diagrams offorces, Scientific Papers II 26, 161207 (1870).
[2] A.G.M. Michell, The limits of economy of material in framestructures, Phil. Mag. 8 (47), 589597 (1904).
34 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
[3] L. Tartar, An introduction to the homogenization methodin optimal design, in: Optimal Shape Design, ed. B. Ka-wohl, O. Pironneau, L. Tartar and J.P. Zolesio, pp. 47156,Springer, Berlin, 2000.
[4] A.V. Cherkaev, Variational Methods for Structural Optimiza-tion, Springer, New York, 2000.
[5] G. Allaire, Shape Optimization by the HomogenizationMethod, Springer, New York, 2002.
[6] R. Lipton, A saddle-point theorem with application to struc-tural optimization, J. Optim. Theory. Appl. 81 (3), 549568(1994).
[7] J. Sokoowski and J.P. Zolesio, Introduction to Shape Opti-mization. Shape Sensitivity Analysis, Springer-Verlag, Berlin,1992.
[8] Z. Wasiutyski, On the congruency of the forming accordingto the minimum potential energy with that according to equalstrength, Bull. Pol. Ac.: Tech. VIII (6), 259268 (1960).
[9] J. Sokoowski and A. ochowski, On topological deriva-tive in shape optimization, SIAM J. Control. Optim. 37 (4),12511272 (1999).
[10] H.A. Eschenauer, V.V. Kobelev, and A. Schumacher, Bubblemethod for topology and shape optimization of structures,Struct. Optim. 8 (1), 4251 (1994).
[11] M.P. Bendse, J.M. Guedes, R.B. Haber, P. Pedersen, andJ.E. Taylor, An analytical model to predict optimal materi-al properties in the context of optimal structural design, J.Appl. Mech. Trans. ASME 61 (4), 930937 (1994).
[12] J. Haslinger, M. Kocvara, G. Leugering, and M. Stingl,Multidisciplinary free material optimization, SIAM J. Appl.Math. 70 (7), 27092728 (2010).
[13] M. Kocvara, M. Stingl, and J. Zowe, Free material optimiza-tion: recent progress, Optimization 57 (1), 79100 (2008).
[14] S. Czarnecki and T. Lewiski, The stiest designs of elas-tic plates. Vector optimization for two loading conditions,Comp. Meth. Appl. Mech. Eng. 200 (1720), 17081728(2011).
[15] S. Czarnecki, T. Lewiski, and T. ukasiak, Free materi-al optimum design of plates of pre-dened Kelvin moduli,9th World Congress on Structural and Multidisciplinary Op-
timization, CD-ROM (2011).[16] W. Zalewski and A. Allen, Shaping Structures. Statics, J. Wi-
ley, New York, 1998.[17] S. Ku and W. Zalewski, Shaping the structures, Symp.
Conceptual Designing-Structural Shaping. Corrugated Iron
Structures. Cable Structures 1, 1126 (2000), (in Polish).[18] W. Zalewski, Strength and lightness the muses of a struc-
tural designer. Architecture 74 (11), 9495 (2000), (in Pol-ish).
[19] W. Zabocki, Optimization of structures and new forms oftall buildings, Architecture 74 (11), 9698 (2000), (in Pol-ish).
[20] W. Zalewski and W. Zabocki, Engineering inspiration offorming tall buildings Structural shapes of light tall build-ings, Symp. Conceptual Designing-Structural Shaping. Cor-rugated Iron Structures. Cable Structures 1, 91106 (2000),(in Polish).
[21] H.L. Cox, The Design of Structures of Least Weight, Perga-mon Press, Oxford, 1965.
[22] W. Hemp, Optimum Structures, Clarendon Press, Oxford,1973.
[23] F. Demengel and P. Suquet, On locking materials, ActaAppl. Math. 6 (2), 185211 (1986).
[24] T. Lewiski and J.J. Telega, Michell-like grillages and struc-tures with locking, Arch. Mech. 53 (45), 457485 (2001).
[25] A. Borkowski, On dual approach to piecewise-linear elasto-plasticity. Part I: Continuum models, Bull. Pol. Ac.: Tech.52 (4), 329343 (2004).
[26] A. Borkowski, On dual approach to piecewise-linear elasto-plasticity. Part II: Discrete models Bull. Pol. Ac.: Tech. 52(4), 345352 (2004).
[27] G. Strang and R.V. Kohn, Hencky-Prandtl nets and con-strained Michell trusses, Comp. Meth. Appl. Mech. Eng. 36(2), 207222 (1983).
[28] C. Graczykowski and T. Lewiski, Michell cantilevers con-structed within trapezoidal domains Part I: Geometry ofHencky nets, Struct. Multidisc. Optim. 32 (5), 347368(2006).
[29] C. Caratheodory and E. Schmidt, Uber die Hencky-Prandtlschen Kurven, Zeitschrift fur Angewandte Mathe-matik und Mechanik 3 (6), 468475 (1923).
[30] C. Graczykowski and T. Lewiski, The lightest plane struc-tures of a bounded stress level transmitting a point load to acircular support, Control and Cybernetics 34 (1), 227253(2005).
[31] T. Lewiski, M. Zhou, and G.I.N. Rozvany, Extended exactsolutions for least-weight truss layouts Part I: Cantileverwith a horizontal axis of symmetry, Int. J. Mech. Sci. 36(5), 375398 (1994).
[32] T. Lewiski, M. Zhou, and G.I.N. Rozvany, Extended exactsolutions for least-weight truss layouts - Part II: Unsymmetriccantilevers, Int. J. Mech. Sci. 36 (5), 399419 (1994).
[33] C. Graczykowski and T. Lewiski, Michell cantilevers con-structed within trapezoidal domains - Part II: Virtual dis-placement elds, Struct. Multidisc. Optim. 32 (6), 463471(2006).
[34] C. Graczykowski and T. Lewiski, Michell cantilevers con-structed within trapezoidal domains Part III: Force elds,Struct. Multidisc. Optim. 33 (1), 2746 (2007).
[35] C. Graczykowski and T. Lewiski, Michell cantilevers con-structed within trapezoidal domains Part IV: Complete exactsolutions of selected optimal designs and their approxima-tions by trusses of nite number of joints, Struct. Multidisc.Optim. 33 (2), 113129 (2007).
[36] C. Graczykowski and T. Lewiski, Michell cantilevers con-structed within a halfstrip. Tabulation of selected benchmarkresults, Struct. Multidisc. Optim. 42 (6), 869877 (2010).
[37] T. Lewiski and G.I.N. Rozvany, Exact analytical solutionsfor some popular benchmark problems in topology optimiza-tion II: three sided polygonal supports, Struct. Multidisc.Optim. 33 (45), 337349 (2007).
[38] T. Lewiski and G.I.N. Rozvany, Exact analytical solutionsfor some popular benchmark problems in topology optimiza-tion III: L-shaped domains, Struct. Multidisc. Optim. 35 (2),165174 (2008).
[39] T. Lewiski and G.I.N. Rozvany, Analytical benchmarksfor topological optimization IV: square-shaped line support,Struct. Multidisc. Optim. 36 (2), 143158 (2008).
[40] T. Sok and T. Lewiski, On the solution of the three forcesproblem and its application to optimal designing of a class ofsymmetric plane frameworks of least weight, Struct. Multi-disc. Optim. 42 (6), 835853 (2010).
[41] G.I.N. Rozvany, Some shortcomings in Michells truss theo-ry, Struct. Optim. 12 (4), 244250 (1996); and Struct. Optim.13 (23), 203204 (1997).
Bull. Pol. Ac.: Tech. 61(1) 2013 35
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
T. Lewiski, S. Czarnecki, G. Dzieranowski and T. Sok
[42] W. Dorn, R. Gomory, and M. Greenberg, Automatic designof optimal structures, J. de Mecanique 3, 2552 (1964).
[43] W. Achtziger, Topology optimization of discrete structures:an introduction in view of computational and nonsmoothaspects, in: Topology Optimization in Structural Mechan-ics, CISM Courses and Lectures 374, ed. G.I.N. Rozvany,pp. 57100, Springer, New York, 1997.
[44] T.J. Pritchard, M. Gilbert, and A. Tyas, Plastic layout opti-mization of large-scale frameworks subject to multiple loadcases, member self-weight and with joint length penalties,6th World Congress of Structural and Multidisciplinary Op-
timization, CD-ROM (2005).[45] M. Gilbert and A. Tyas, Layout optimization of large-
scale pin-jointed frames, Eng. Comput. 20 (78), 10441064(2003).
[46] A. Tyas, A.V. Pichugin, and M. Gilbert, Optimum structureto carry a uniform load between pinned supports: exact an-alytical solution, Proc. Roy. Soc. A 467 (2128), 11011120(2011).
[47] T. Sok, A 99 line code for discretized Michell truss opti-mization written in Mathematica, Struct. Multidisc. Optim.43 (2), 181190 (2011).
[48] http://link.springer.com/content/esm/art:10.1007/s00158-010-0557-z/MediaObjects/ 158 2010 557 MOESM1 ESM.pdf.(Electronic Supplementary Material with Complete Code ofProgram by Sok [47]).
[49] R.E. McConnel, Least-weight frameworks for loads acrossspan, J. Eng. Mech. Div. 100 (5), 885901 (1974).
[50] T. Lewiski, G.I.N. Rozvany, T. Sok, and K. Bobotows-ki, Exact analytical solutions for some popular benchmarkproblems in topology optimization III: L-shaped domains re-visited, Struct. Multidisc. Optimiz. (2013), (to be published).
[51] A.V. Pichugin, A. Tyas, and M. Gilbert, Michell structurefor a uniform load over multiple spans, 9th World Congresson Structural and Multidisciplinary Optimization, CD-ROM(2011).
[52] H.S.Y. Chan, Symmetric plane frameworks of least weight,in: Optimization in Structural Design, ed. A. Sawczuk,Z. Mrz, pp. 313326, Springer, Berlin, 1975.
[53] A.V. Pichugin, A. Tyas, and M. Gilbert, On the optimali-ty of Hemps arch with vertical hangers, Struct. Multidisc.Optimiz. 46 (1), 1725 (2012).
[54] T. Sok and G.I.N. Rozvany, New analytical benchmarksfor topology optimization and their implications. Part I: bi-symmetric trusses with two point loads between supports,Struct. Multidisc. Optim. 46 (4), 477486 (2012).
[55] T. Sok and T. Lewiski, Optimal design of a class of sym-metric plane frameworks of least weight, Struct. Multidisc.Optim. 44 (5), 729734 (2011).
[56] T. Sok and T. Lewiski, On the three forces problem intruss topology optimization. Analytical and numerical solu-tions, 9th World Congress on Structural and Multidiscipli-nary Optimization, Book of Abstracts 1, 76 (2011).
[57] G.I.N. Rozvany and T. Sok, Exact truss topology opti-mization: allowance for support costs and dierent permis-sible stresses in tension and compression Extensions of aclassical solution by Michell, Struct. Multidisc. Optimiz. 45(3), 367376 (2012).
[58] T. Lewiski, Michell structures formed on surfaces of revo-lution, Struct. Multidisc. Optim. 28 (1), 2030 (2004).
[59] D. Bojczuk, Sensitivity analysis and optimization of barstructures, Monographs, Studies, Treatises, Kielce Univer-
sity of Technology, Kielce, 1999 (in Polish).[60] W. Prager, Optimal layout of trusses of nite number of
joints, J. Mech. Phys. Solids 26 (4), 241250 (1978).[61] W. Prager, Nearly optimal design of trusses, Comp. Struct.
8 (34), 451454 (1978).[62] A. Mazurek, W. Baker, and C. Tort, Geometrical aspects of
optimum truss like structures, Struct. Multidisc. Optim. 43(2), 231242 (2011).
[63] Z. Rychter and A. Musiuk, Topological sensitivity to diago-nal member ips of two-layered statically determinate trussesunder worst loading, Int. J. Solids. Struct. 44 (1415), 49424957 (2007).
[64] S. Czarnecki, Compliance optimization of the truss struc-tures, Comp. Assist. Mech. Engrg. Sci. 10 (2), 117137(2003).
[65] S. Czarnecki, Minimization of compliance of frame struc-tures. Application of symbolic programme Maple to theanalysis of sensitivity, in: Theoretical Foundations of CivilEngineering, Polish-Ukrainian Transactions, ed. W. Szczeni-ak, vol. 12 (1), pp. 4964, Warsaw University of Technology,Warsaw-Dnepropetrovsk, 2004, (in Polish).
[66] S. Czarnecki, Application of the moving asymptotes methodin the optimization of topology and geometry of spatialframes, 50th Jubilee Scientific Conf. Commitee on Civil andHydroengineering and Scientific Commitee of Polish Associ-
ation of Civil Engineers and Technicians II, 4552 (2004),(in Polish).
[67] S. Czarnecki, Form nding of tulip-like space structures,in: Int. IASS Symposium on Lightweight Structures in CivilEngineering, ed. J.B. Obrbski, pp. 119128, J.B. ObrbskiPublishing House, Warsaw, Poland, 2002.
[68] S. Czarnecki, Application of the Strongin-Sergeyev globaloptimization method in the compliance minimization of lat-ticed shells, Comp. Assist. Mech. Eng. Sci. 16 (3/4), 291307(2009).
[69] G.I.N. Rozvany and C.M. Wang, On plane Prager-structures-I, Int. J. Mech. Sci. 25 (7), 519527 (1983).
[70] C.M. Wang and G.I.N. Rozvany, On plane Prager-structures-II. Non- parallel external loads and allowances for self-weight, Int. J. Mech. Sci. 25 (7), 529541 (1983).
[71] K. Hetmaski and T. Lewiski, Shaping the plane framesand arches for avoiding bending, in: Theoretical Foundationsof Civil Engineering XV, Proc. Polish-Ukrainian-LithuanianTransactions, ed. W. Szczeniak, pp. 231246, Warsaw Uni-versity of Technology Publishing House, Warszawa, 2007, (inPolish).
[72] G.I.N. Rozvany, Optimal Design of Flexural Systems, Perga-mon Press, London, 1976.
[73] G.I.N. Rozvany, Structural Design via Optimality Criteria,Kluwer Academic Publishers, Dordrecht, 1989.
[74] O. Amir and O. Sigmund, Reinforcement layout design forconcrete structures based on continuum damage and trusstopology optimization, Struct. Multidisc. Optimiz. 47 (2),157174 (2013).
[75] http://www.som.com/project/transbay-transit-center-design-competition.
[76] http://www.som.com/project/tianjin-high-speed-rail-station.[77] T. Lewiski and J.J. Telega, Plates, Laminates and Shells.
Asymptotic Analysis and Homogenization, World ScienticPublishing, London, 2000.
[78] T. Lewiski, Homogenization and optimal design in struc-tural mechanics, in: Nonlinear homogenization and its appli-
36 Bull. Pol. Ac.: Tech. 61(1) 2013
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM
Topology optimization in structural mechanics
cation to composites, polycrystals and smart materials, eds.P.P. Castaneda, J.J. Telega and B. Gambin, pp. 139-168, NA-TO Science Series II, Mathematics, Physics and Chemistry170, Dordrecht, 2004.
[79] G. Dzieranowski, Optimum Layout of Materials Within ThinElastic Plates, Warsaw University of Technology PublishingHouse, Warszawa, 2010 (in Polish).
[80] G. Dzieranowski, Bounds on the eective isotropic moduliof thin elastic composite plates, Arch. Mech. 62 (4), 253281(2010).
[81] M.P. Bendse and O. Sigmund, Material interpolationschemes in topology optimization, Arch. Appl. Mech. 69 (910), 635654 (1999).
[82] M.P. Bendse, Optimization of Structural Topology, Shapeand Material, Springer, Berlin, 1995.
[83] M.P. Bendse and O. Sigmund, Topology Optimization, The-ory, Methods and Applications, Springer, Berlin, 2003.
[84] M.P. Bendse, Optimal shape design as a material distribu-tion problem, Struct. Optim. 1 (4), 193202 (1989).
[85] M. Zhou and G.I.N. Rozvany, The COC algorithm, PartII: Topological, geometrical and generalized shape optimiza-tion, Comp. Meth. Appl. Mech. Eng. 89 (13), 309336(1991).
[86] G. Dzieranowski, On the comparison of material interpo-lation schemes and optimal composite properties in planeshape optimization, Struct. Multidisc. Optim. 46 (5), 693710 (2012).
[87] M. Stolpe and K. Svanberg, An alternative interpolationscheme for minimum compliance topology optimization,Struct. Multidisc. Optim. 22 (2), 116124 (2001).
[88] O. Sigmund and J. Petersson, Numerical instabilities intopology optimization: A survey on procedures dealing withcheckerboards, mesh-dependencies and local minima, Struct.Optim. 16 (1), 6875 (1998).
[89] B. Bourdin, Filters in topology optimization, Int. J. Numer.Meth. Eng. 50 (9), 21432158 (2001).
[90] R. Kutyowski, On an eective topology procedure, Struct.Multidisc. Optim. 20 (1), 4956 (2000).
[91] K. Kolanek and T. Lewiski, Circular and annular two-phaseplates of minimal compliance, Comp. Assist. Mech. Eng. Sci.10 (2), 177199 (2003).
[92] S. Czarnecki, M. Kursa, and T. Lewiski, Sandwich platesof minimal compliance, Comp. Meth. Appl. Mech. Eng. 197(5152), 48664881 (2008).
[93] R. Studziski, Z. Pozorski, and A. Garstecki, Optimal designof sandwich panels with a soft core, J. Theor. Appl. Mech.47 (3), 685699 (2009).
[94] A.R. Daz, R. Lipton and C.A. Soto, A new formulation ofthe problem of optimum reinforcement of Reissner-Mindlinplates, Comp. Meth. Appl. Mech. Eng. 123 (14), 121139(1995).
[95] G. Dzieranowski, Stress energy minimization as a tool inthe material layout design of shallow shells, Int. J. SolidsStruct. 49 (1112), 13431354 (2012).
[96] L.A. Krog and N. Olho, Topology and reinforcement layoutoptimization of disk, plate, and shell structures, in: Topolo-gy Optimization in Structural Mechanics, ed. G.I.N. Rozvany,pp. 237322, Springer, Wien, 1997.
[97] G. Allaire, E. Bonnetier, G. Francfort, and F. Jouve, Shapeoptimisation by the homogenisation method, Numer. Math.76 (1), 2768 (1997).
[98] T. Borrvall and J. Petersson, Large-scale topology optimiza-tion in 3D using parallel computing, Comp. Meth. Appl.Mech. Eng. 190 (4647), 62016229 (2001).
[99] S. Czarnecki and T. Lewiski, Shaping the stiest three-dimensional structures from two given isotropic materials,Comp. Assist. Mech. Eng. Sci. 13 (1), 5383 (2006).
[100] O. Pironneau, Optimal Shape Design for Elliptic Systems,Springer-Verlag, Berlin 1984.
[101] M. Nowak, Structural optimization system based on trabec-ular bone surface adaptation, Struct. Multidisc. Optim. 32(3), 241249 (2006).
[102] T. Lewiski and J. Sokoowski, Energy change due to theappearance of cavities in elastic solids, Int. J. Solids Struct.40 (7), 17651803 (2003).
[103] S. Czarnecki and T. Lewiski, A stress-based formulation ofthe free material design problem with the trace constraint andone loading condition, Bull. Pol. Ac.: Tech. 60 (2), 191204(2012).
[104] G. Dzieranowski and T. Lewiski, Compliance minimiza-tion of thin plates made of material with predened Kelvinmoduli. Part I. Solving the local optimization problem, Arch.Mech. 64 (1), 2140 (2012); erratum: Arch. Mech. 64 (2), 121(2012).
[105] G. Dzieranowski and T. Lewiski, Compliance minimiza-tion of thin plates made of material with predened Kelvinmoduli. Part II. The eective boundary value problem andexemplary solutions, Arch. Mech. 64 (2), 111135 (2012).
[106] W.H. Press, S.A. Teukolsky, W.T. Vetterling, and B.P. Flan-nery, Numerical Recipes in C. The Art of Scientific Comput-ing, Cambridge University Press, Cambridge, 1992.
[107] A. Dugosz and T. Burczyski, Multiobjective shape opti-mization of selected coupled problems by means of evolu-tionary algorithms, Bull. Pol. Ac.: Tech. 60 (2), 215222(2012).
[108] M. Mrzygd, Multi-constrained topology optimization us-ing constant criterion surface algorithm, Bull. Pol. Ac.: Tech.60 (2), 229236 (2012).
[109] M. Szczepanik and T. Burczyski, Swarm optimization ofstieners locations in 2-D structures, Bull. Pol. Ac.: Tech.60 (2), 241246 (2012).
Bull. Pol. Ac.: Tech. 61(1) 2013 37
Unauthenticated | 89.67.242.59Download Date | 5/19/13 7:48 PM