Embed Size (px)
Citation preview

Lecture: Algorithms for Compressed Sensing
Zaiwen Wen
Beijing International Center For Mathematical ResearchPeking University
http://bicmr.pku.edu.cn/~wenzw/[email protected]
Acknowledgement: part of this slides is based on Prof. Lieven Vandenberghe and Prof.Wotao Yin’s lecture notes
1/56

2/56
Outline
Proximal gradient method
Complexity analysis of Proximal gradient method
Alternating direction methods of Multipliers (ADMM)
Linearized Alternating direction methods of Multipliers
Check lecture notes athttp://bicmr.pku.edu.cn/~wenzw/opt-2017-fall.html

3/56
`1-regularized least square problem
Considermin ψµ(x) := µ‖x‖1 +
12‖Ax− b‖2
2
Approaches:Interior point method: l1_lsSpectral gradient method: GPSRFixed-point continuation method: FPCActive set method: FPC_ASAlternating direction augmented Lagrangian methodNesterov’s optimal first-order methodmany others

4/56
Subgradient
recall basic inequality for convex differentiable f :
f (y) ≥ f (x) +∇f (x)>(y− x).
g is a subgradient of a convex function f at x ∈ domf if
f (y) ≥ f (x) + g>(y− x),∀y ∈ domf .
g2, g3 are subgradients at x2, g1 is a subgradient at x1.

5/56
Optimality conditions — unconstrained
x∗ minimizes f (x) if and only
0 ∈ ∂f (x∗)
Proof: by definition
f (y) ≥ f (x∗) + 0>(y− x∗) for all y ⇐⇒ 0 ∈ ∂f (x∗).

6/56
Optimality conditions — constrained
min f0(x)
s.t. fi(x) ≤ 0, i = 1, . . . ,m.
From Lagrange duality: if strong duality holds, then x∗, λ∗ areprimal, dual optimal if and only if
x∗ is primal feasible
λ∗ ≥ 0
complementary: λ∗i fi(x∗) = 0 for i = 1, . . . ,m
x∗ is a minimizer of min L(x, λ∗) = f0(x) +∑
i λ∗i fi(x), i.e.,
0 ∈ ∂xL(x, λ∗) = ∂f0(x∗) +∑
i
λ∗i ∂fi(x∗)

7/56
Proximal Gradient Method
Let f (x) = 12‖Ax− b‖2
2. The gradient ∇f (x) = A>(Ax− b). Consider
min ψµ(x) := µ‖x‖1 + f (x).
First-order approximation + proximal term:
xk+1 := arg minx∈Rn
µ‖x‖1 + (∇f (xk))>(x− xk) +1
2τ‖x− xk‖2
2
= arg minx∈Rn
µ‖x‖1 +1
2τ‖x− (xk − τ∇f (xk))‖2
2
= shrink(xk − τ∇f (xk), µτ)
gradient step: bring in candidates for nonzero componentsshrinkage step: eliminate some of them by “soft” thresholding

8/56
Shrinkage (soft thresholding)
shrink(y, ν) : = arg minx∈R
ν‖x‖1 +12‖x− y‖2
2
= sgn(y) max(|y| − ν, 0)
=
{y− νsgn(y), if |y| > ν
0, otherwise
Chambolle, Devore, Lee and LucierFigueirdo, Nowak and WrightElad, Matalon and ZibulevskyHales, Yin and ZhangDarbon, OsherMany others
9/56
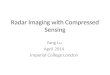
Proximal gradient method For General Problems
Consider the model
min F(x) := f (x) + r(x)
f (x) is convex, differentiabler(x) is convex but may be nondifferentiable
General scheme: linearize f (x) and add a proximal term:
xk+1 := arg minx∈Rn
r(x) + (∇f (xk))>(x− xk) +1
2τ‖x− xk‖2
2
= arg minx∈Rn
τr(x) +12‖x− (xk − τ∇f (xk))‖2
= proxτr(xk − τ∇f (xk))
Proximal Operator
proxr(y) := arg minx
r(x) +12‖x− y‖2
2.

10/56
Proximal mapping
if g is convex and closed (has a closed epigraph), then
proxr(y) := arg minx
r(x) +12‖x− y‖2
2
exists and is unique for all y.from optimality conditions of minimization in the definition:
x = proxr(y) ⇐⇒ y− x ∈ ∂r(x)
⇐⇒ r(z) ≥ r(x) + (y− x)>(z− x), ∀z
subdifferential of a convex function is a monotone operator:
(u− v)>(x− y) ≥ 0 ∀x, y, u ∈ ∂f (x), v ∈ ∂f (y)
proof: combining the following two inequalities
f (y) ≥ f (x) + u>(y− x), f (x) ≥ f (y) + v>(x− y)
11/56
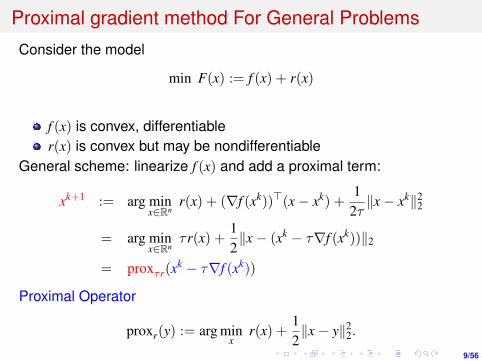
Nonexpansiveness
if u = proxr(x), v = proxr(y), then
(u− v)>(x− y) ≥ ‖u− v‖2
proxr is is firmly nonexpansive, or co-coercive with constant 1follows from last page and monotonicity of subgradients
x− u ∈ ∂r(u), y− v ∈ ∂r(v) =⇒ (x− u− y + v)>(u− v) ≥ 0
implies (from Cauchy-Schwarz inequality)
‖proxr(x)− proxr(y)‖2 ≤ ‖x− y‖2

12/56
Global convergence
The proximal mapping is nonexpansiveUnder certain assumptions, h(x) = x− τ∇f (x) is nonexpansive:
‖h(x)− h(x′)‖ ≤ ‖x− x′‖,
and r(x) = r(x′) whenever the equality holds.x is a fixed point if
‖proxτr(h(x))− proxτr(h(x∗))‖ ≡ ‖proxτr(h(x))− x∗‖ = ‖x− x∗‖

13/56
Proximal gradient method for `1-minimization
AdvantagesLow computational cost (first-order method)Finite convergence of the nondegenerate supportGlobal q-linear convergence
DisadvantagesTakes a lot of steps when the support is relatively largeSlow convergence: degenerate support identification ormagnitude recovery?
Strategies for improving shrinkageAdjust λ dynamically (use λk)Line search xk+1 = xk + αk(shrink(xk − λk∇f k, µλk)− xk)Continuation: approximately solve for µ0 > µ1 > · · · > µp = µ(FPC)Debiasing or subspace optimization

14/56
Line search approach
Let xk(τ k) = shrink(xk − τ k∇f k, µτ k). Then set
xk+1 = xk + αk(xk(τ k)− xk)
= xk + αkdk
Choosing τ k: Barzilai-Borwein method∇f k = A>(Axk − b)sk−1 = xk − xk−1 and yk−1 = ∇f k −∇f k−1
τ k,BB1 = (sk−1)>sk−1
(sk−1)>yk−1 or τ k,BB2 = (sk−1)>yk−1
(yk−1)>yk−1 .
Choosing αk: Armijo-like Line search
ψµ(xk + αkdk) ≤ Ck + σαk∆k
FPC: ∆k := (∇f k)>dk
FPC_AS: ∆k := (∇f k)>dk + µ‖xk(τ k)‖1 − µ‖xk‖1Ck = (ηQk−1Ck−1 + ψµ(xk))/Qk, Qk = ηQk−1 + 1, C0 = ψµ(x0) andQ0 = 1 (Zhang and Hager)

15/56
Outline: Complexity Analysis
Amir Beck and Marc Teboulle, A fast iterative shrinkage thresholdingalgorithm for linear inverse problemsPaul Tseng, On accelerated proximal gradient methods forconvex-concave optimizationPaul Tseng, Approximation accuracy, gradient methods and errorbound for structured convex optimization
N. S. Aybat and G. Iyengar, A first-order augmented Lagrangianmethod for compressed sensing

16/56
Proximal Gradient/ISTA/FPC
The following terminologies refer to the same algorithm:proximal gradient methodISTA: iterative shrinkage thresholding algorithmFPC: fixed-point continuation method
Considermin F(x) := µ‖x‖1 +
12‖Ax− b‖2
2
ISTA/FPC computes
xk+1 := arg minµ‖x‖1 + (∇fk)>(x− xk) +1
2τ‖x− xk‖2
2
= shrink(xk − τ∇fk, µτ)
Complexity?How can we speed it up?

17/56
Generalization of ISTA
Consider a solvable model
min F(x) := f (x) + r(x)
r(x) continuous convex, may be nonsmoothf (x) continuously diff. with Lipschitz continuous gradient
‖∇f (x)−∇f (y)‖2 ≤ Lf ‖x− y‖2
The cost of the following problem is tractable
pL(y) := arg minx
QL(x, y) := f (y) + 〈∇f (y), x− y〉+L2‖x− y‖2
2 + r(x)
= arg minx
r(x) +L2
∥∥∥∥x−(
y− 1L∇f (y)
)∥∥∥∥2
2
= prox1/L(y− 1L∇f (y))
ISTABasic iteration: xk = pL(xk−1)

18/56
Quadratic upper bound
Suppose ∇f is Lipschitz continuous with parameter L and domf isconvex. Then
f (y) ≤ f (x) +∇f (x)>(y− x) +L2‖y− x‖2
2, ∀x, y.
Proof: Let v = y− x. Then
f (y) = f (x) +∇f (x)>v +
∫ 1
0(∇f (x + tv)−∇f (x))>vdt
≤ f (x) +∇f (x)>v +
∫ 1
0‖∇f (x + tv)−∇f (x)‖2‖v‖2dt
≤ f (x) +∇f (x)>v +
∫ 1
0Lt‖v‖2
2dt
= f (x) +∇f (x)>v +L2‖y− x‖2
2
The above inequality also implies that F(pL(y)) ≤ Q(pL(y), y).

19/56
Lemma: Assume F(pL(y)) ≤ Q(pL(y), y), then for any x ∈ Rn,
F(x)− F(pL(y)) ≥ L2‖pL(y)− y‖2 + L 〈y− x, pL(y)− y〉
=L2(‖pL(y)− x‖2
2 − ‖x− y‖22)
Proof: ∇f (y) + L(pL(y)− y) + z = 0 for some z ∈ ∂r(pL(y)).
The convexity of f and g gives
f (x) ≥ f (y) +∇f (y)>(x− y)
r(x) ≥ r(pL(y)) + z>(x− pL(y)).
Using the definition of Q(pL(y), y) and z
F(x)− F(pL(y)) ≥ F(x)− Q(pL(y), y)
≥ −L2‖pL(y)− y‖2 + (x− pL(y))>(∇f (y) + z)

20/56
Complexity analysis of ISTA
Complexity results: F(xk)− F(x∗) ≤ Lf ‖x0−x∗‖22
2k
Let x = x∗, y = xj, then
2L
(F(x∗)− F(xj+1)) ≥ ‖x∗ − xj+1‖22 − ‖x∗ − xj‖2
2
Summing over j := 0, · · · , k − 1 gives
2L
(kF(x∗)−k−1∑j=0
F(xj+1)) ≥ ‖x∗ − xk‖22 − ‖x∗ − x0‖2
2
Let x = y = xj yields2L (F(xj)− F(xj+1)) ≥ ‖xj − xj+1‖2
2Multiplying the last ineq. by j and summing over j := 0, · · · , k − 1 gives
2L (−kF(xk) +
∑k−1j=0 F(xj+1)) ≥
∑k−1j=0 j‖xj − xj+1‖2
2
Therefore2kL (F(x∗)− F(xk)) ≥ ‖x∗ − xk‖2
2 +∑k−1
j=0 j‖xj − xj+1‖22 − ‖x∗ − x0‖2
2

21/56
FISTA: Accelerated proximal gradient
Given y1 = x0 and t1 = 1, compute:
xk = pL(yk)
tk+1 =1 +
√1 + 4t2
k
2
yk+1 = xk +tk − 1tk+1
(xk − xk−1)
Complexity results:
F(xk)− F(x∗) ≤2Lf ‖x0 − x∗‖2
2(k + 1)2
Lipschitz constant Lf is unknown?Choose L by backtracking so that F(pL(yk)) ≤ QL(pL(yk), yk)

22/56
Complexity analysis of FISTA
Let vk := F(xk)− F(x∗) and uk := tkxk − (tk − 1)xk−1 − x∗,
2L
(t2kvk − t2
k+1vk+1)≥ ‖uk+1‖2
2 − ‖uk‖22
If ak − ak+1 ≥ bk+1 − bk, with a1 + b1 ≤ c, then ak ≤ c
tk ≥ (k + 1)/2
Let ak = 2L t2
kvk, bk = ‖uk‖22, and c = ‖x0 − x∗‖2
2.Check a1 + b1 ≤ c:
F(x∗)− F(x1) = F(x∗)− F(pL(y1))
≥ L2‖pL(y1)− y1‖2
2 + L 〈y1 − x∗, pL(y1)− y1〉
=L2
(‖x1 − x∗‖22 − ‖y1 − x∗‖2
2)

23/56
Complexity analysis of FISTA
Let (x = xk, y = yk+1) and (x = x∗, y = yk+1). Note xk+1 = pLk+1 (yk+1):
2L−1(vk − vk+1) ≥ ‖xk+1 − yk+1‖22 + 2 〈xk+1 − yk+1, yk+1 − xk〉 (1)
−2L−1vk+1 ≥ ‖xk+1 − yk+1‖22 + 2 〈xk+1 − yk+1, yk+1 − x∗〉 (2)
((1) ∗ (tk+1 − 1) + (2)) ∗ tk+1 and using t2k = t2
k+1 − tk+1:
2tk+1
L((tk+1 − 1)vk − tk+1vk+1) =
2L
(t2k vk − t2
k+1vk+1)
≥ ‖tk+1(xk+1 − yk+1)‖22 + 2tk+1 〈xk+1 − yk+1, tk+1yk+1 − (tk+1 − 1)xk − x∗〉
‖b− a‖22 + 2 〈b− a, a− c〉 = ‖b− c‖2
2 − ‖a− c‖22
yk+1 = xk + tk−1tk+1
(xk − xk−1):
2L
(t2k vk − t2
k+1vk+1)
≥ ‖tk+1xk+1 − (tk+1 − 1)xk − x∗‖22 − ‖tk+1yk+1 − (tk+1 − 1)xk − x∗‖2
2
= ‖uk+1‖22 − ‖uk‖2
2
24/56
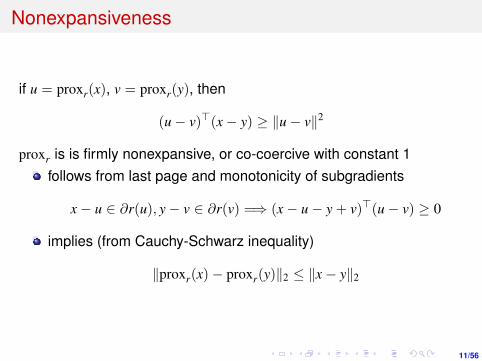
Proximal gradient method
Consider the model
min F(x) := f (x) + r(x)
Linearize f (x):
`f (x, y) := f (y) + 〈∇f (y), x− y〉+ r(x)
Given a strictly convex function h(x), Bregman distance:
D(x, y) := h(x)− h(y)− 〈∇h(y), x− y〉 .
For example, take h(x) = ‖x‖22. Then D(x, y) = ‖x− y‖2
2.Proximal gradient method can also be written as
xk+1 := arg minx
`f (x, xk) +L2
D(x, xk)

25/56
APG Variant 1
Acclerated proximal gradient (APG):Set x−1 = x0 and θ−1 = θ0 = 1:
yk = xk + θk(θ−1k−1 − 1)(xk − xk−1)
xk+1 = arg minx
`f (x, yk) +L2‖x− yk‖2
2
θk+1 =
√θ4
k + 4θ2k − θ2
k
2
Question: what is the difference between θk and tk?

26/56
APG Variant 2
Replace 12‖x− yk‖2
2 by Bregman distance D(x, yk)Set x0, z0 and θ0 = 1:
yk = (1− θk)xk + θkzk
zk+1 = arg minx
`f (x, yk) + θkLD(x, zk)
xk+1 = (1− θk)xk + θkzk+1
θk+1 =
√θ4
k + 4θ2k − θ2
k
2

27/56
APG Variant 3
Set x0, z0 := arg min h(x) and θ0 = 1:
yk = (1− θk)xk + θkzk
zk+1 = arg minx
k∑i=0
`f (x, yi)
θi+ Lh(x)
xk+1 = (1− θk)xk + θkzk+1
θk+1 =
√θ4
k + 4θ2k − θ2
k
2

28/56
Complexity analysis
Proximal gradient method
F(xk) ≤ F(x) +1k
LD(x, x0)
APG1:F(xk) ≤ F(x) +
4(k + 1)2 LD(x, x0)
APG2:F(xk) ≤ F(x) +
4(k + 1)2 LD(x, z0)
APG3:F(xk) ≤ F(x) +
4(k + 1)2 L(h(x)− h(x0))

29/56
Complexity analysis
Let f (x) is convex and assume ∇f (x) is Lipschitz cont.
F(x) ≥ `f (x, y) ≥ F(x)− L2‖x− y‖2
2.
For any proper lsc convex function ψ(x), if z+ = arg minx ψ(x) + D(x, z)and h(x) is differentiable at z+, then
ψ(x) + D(x, z) ≥ ψ(z+) + D(x, z+) + D(z+, z).
Proof: The optimality at z+ and definition of subgradient gives
ψ(x) +∇xD(z+, z)>(x− z+) ≥ ψ(z+).
Note ∇xD(z+, z) = ∇h(z+)−∇h(z). Rearranging terms yields
ψ(x)−∇h(z)>(x− z) ≥ ψ(z+)−∇h(z)>(z+ − z)−∇h(z+)>(x− z+).
Adding h(x)− h(z) to both sides.

30/56
Complexity analysis of APG2
F(xk+1)
≤ `f (xk+1, yk) +L2‖xk+1 − yk‖2
2
= `f ((1− θk)xk + θzk+1, yk) +Lθ2
k2‖zk+1 − zk‖2
2
≤ (1− θk)`f (xk, yk) + θk`f (zk+1, yk) + θ2k LD(zk+1, zk)
≤ (1− θk)`f (xk, yk) + θk (`f (x, yk) + θkLD(x, zk)− θkLD(x, zk+1))
≤ (1− θk)F(xk) + θkF(x) + θ2k LD(x, zk)− θ2
k LD(x, zk+1)
The third inequality applies the inequality for `f (x, z) + θLD(x, z).
Let ek = F(xk)− F(x) and ∆k = LD(x, zk),then
ek+1 ≤ (1− θk)ek + θ2k∆k − θ2
k∆k+1

31/56
Complexity analysis of APG2
Divide both sides by θ2k and using 1
θ2k
=1−θk+1θ2
k+1:
1− θk+1
θ2k+1
ek+1 + ∆k+1 ≤1− θk
θ2k
ek + ∆k
Hence1− θk+1
θ2k+1
ek+1 + ∆k+1 ≤1− θ0
θ20
e0 + ∆0
Using 1θ2
k=
1−θk+1θ2
k+1and θ0 = 1:
1θ2
kek+1 ≤ ∆0 −∆k+1 ≤ ∆0 = LD(x, z0)

32/56
An application to Basis Pursuit problem
Considermin ‖x‖1 s.t. Ax = b
Augmented Lagragian (Bregman) framework (b1 = b, k = 1):
x∗k := arg minx
Fk(x) := µk‖x‖1 +12‖Ax− bk‖2
2
bk+1 := b +µk+1
µk(bk − Axk)
obtaining x∗k+1 exactly is difficultinexact solver: how do we control the accuracy?Analysis of Bregman approach (see wotao), no complexitySolving each x∗k+1 by the APG algorithms?

33/56
Outline: ADMM
Alternating direction augmented Lagrangian methodsVariable splitting methodConvergence for problems with two blocks of variables

34/56
References
Wotao Yin, Stanley Osher, Donald Goldfarb, Jerome Darbon,Bregman Iterative Algorithms for l1-Minimization withApplications to Compressed SensingJunfeng Yang, Yin Zhang, Alternating direction algorithms forl1-problems in Compressed SensingTom Goldstein, Stanely Osher, The Split Bregman Method forL1-Regularized ProblemsB.S. He, H. Yang, S.L. Wang, Alternating Direction Method withSelf-Adaptive Penalty Parameters for Monotone VariationalInequalities

35/56
Basis pursuit problem
Primal: min ‖x‖1, s.t. Ax = b
Dual: max b>λ, s.t. ‖A>λ‖∞ ≤ 1
The dual problem is equivalent to
max b>λ, s.t. A>λ = s, ‖s‖∞ ≤ 1.

36/56
Augmented Lagrangian (Bregman) framework
Augmented Lagrangian function:
L(λ, s, x) := −b>λ+ x>(A>λ− s) +1
2µ‖A>λ− s‖2
Algorithmic frameworkCompute λk+1 and sk+1 at k-th iteration
(DL) minλ,s L(λ, s, xk), s.t. ‖s‖∞ ≤ 1
Update the Lagrangian multiplier:xk+1 = xk + A>λk+1−sk+1
µ
Pros and Cons:Pros: rich theory, well understood and a lot of algorithmsCons: L(λ, s, xk) is not separable in λ and s, and the subproblem(DL) is difficult to minimize

37/56
An alternating direction minimization scheme
Divide variables into different blocks according to their rolesMinimize the augmented Lagrangian function with respect to oneblock at a time while all other blocks are fixed
ADMM
λk+1 = arg minλL(λ, sk, xk)
sk+1 = arg minsL(λk+1, s, xk), s.t. ‖s‖∞ ≤ 1
xk+1 = xk +A>λk+1 − sk+1
µ
38/56
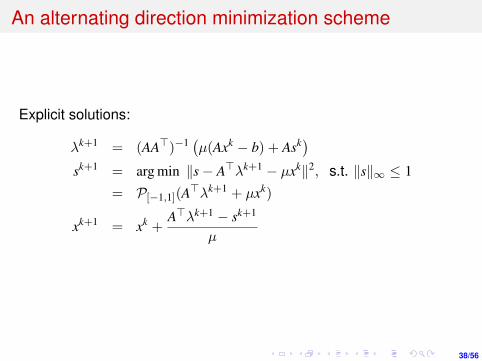
An alternating direction minimization scheme
Explicit solutions:
λk+1 = (AA>)−1 (µ(Axk − b) + Ask)sk+1 = arg min ‖s− A>λk+1 − µxk‖2, s.t. ‖s‖∞ ≤ 1
= P[−1,1](A>λk+1 + µxk)
xk+1 = xk +A>λk+1 − sk+1
µ

39/56
ADMM for BP-denoising
Primal:min ‖x‖1, s.t. ‖Ax− b‖2 ≤ σ
which is equivalent to
min ‖x‖1, s.t. Ax− b + r = 0, ‖r‖2 ≤ σ
Lagrangian function:
L(x, r, λ) := ‖x‖1 − λ>(Ax− b + r) + π(‖r‖2 − σ)
= ‖x‖1 − (A>λ)>x + π‖r‖2 − λ>r + b>λ− πσ
Hence, the dual problem is:
max b>λ− πσ, s.t. ‖A>λ‖∞ ≤ 1, ‖λ‖2 ≤ π

40/56
ADMM for BP-denoising
The dual problem is equivalent to:
max b>λ− πσ, s.t. A>λ = s, ‖s‖∞ ≤ 1, ‖λ‖2 ≤ π
Augmented Lagrangian function is:
L(λ, s, x) := −b>λ+ πσ + x>(A>λ− s) +1
2µ‖A>λ− s‖2
ADMM scheme:
λk+1 = arg min1
2µ‖A>λ− sk‖2 + (Axk − b)>λ, s.t. ‖λ‖2 ≤ πk
sk+1 = arg min ‖s− A>λk+1 − µxk‖2, s.t. ‖s‖∞ ≤ 1
= P[−1,1](A>λk+1 + µxk)
πk+1 = ‖λk+1‖2
xk+1 = xk +A>λk+1 − sk+1
µ

41/56
ADMM for `1-regularized problem
Primal:min µ‖x‖1 +
12‖Ax− b‖2
2
which is equivalent to
min µ‖x‖1 +12‖r‖2
2, s.t. Ax− b = r.
Lagrangian function:
L(x, r, λ) := µ‖x‖1 +12‖r‖2
2 − λ>(Ax− b− r)
= µ‖x‖1 − (A>λ)>x +12‖r‖2
2 + λ>r + b>λ
Hence, the dual problem is:
max b>λ− 12‖λ‖2, s.t. ‖A>λ‖∞ ≤ µ

42/56
ADMM for `1-regularized problem
The dual problem is equivalent to
max b>λ− 12‖λ‖2, s.t. A>λ = s, ‖s‖∞ ≤ µ.
Augmented Lagrangian function is:
L(λ, s, x) := −b>λ+12‖λ‖2 + x>(A>λ− s) +
12µ‖A>λ− s‖2
ADMM scheme:
λk+1 = (AA> + µI)−1 (µ(Axk − b) + Ask)sk+1 = arg min ‖s− A>λk+1 − µxk‖2, s.t. ‖s‖∞ ≤ µ
= P[−µ,µ](A>λk+1 + µxk)
xk+1 = xk +A>λk+1 − sk+1
µ

43/56
YALL1
Derive ADMM for the following problems:
BP: minx∈Cn ‖Wx‖w,1, s.t. Ax = b
L1/L1: minx∈Cn ‖Wx‖w,1 +1ν‖Ax− b‖1
L1/L2: minx∈Cn ‖Wx‖w,1 +1
2ρ‖Ax− b‖2
2
BP+: minx∈Rn ‖x‖w,1, s.t. Ax = b, x ≥ 0
L1/L1+: minx∈Rn ‖x‖w,1 +1ν‖Ax− b‖1, s.t. x ≥ 0
L1/L2+: minx∈Rn ‖x‖w,1 +1
2ρ‖Ax− b‖2
2, s.t. x ≥ 0
ν, ρ ≥ 0, A ∈ Cm×n, b ∈ Cm,x ∈ Cn for the first three and x ∈ Rn for thelast three, W ∈ Cn×n is an unitary matrix serving as a sparsifyingbasis, and ‖x‖w,1 :=
∑ni=1 wi|xi|.

44/56
Variable splitting
Given A ∈ Rm×n, consider min f (x) + g(Ax), which is
min f (x) + g(y), s.t. Ax = y
Augmented Lagrangian function:
L(x, y, λ) = f (x) + g(y)− λ>(Ax− y) +1
2µ‖Ax− y‖2
2
ADMM
(Px) : xk+1 := arg minx∈X
L(x, yk, λk),
(Py) : yk+1 := arg miny∈Y
L(xk+1, y, λk),
(Pλ) : λk+1 := λk − γAxk+1 − yk+1
µ

45/56
Variable splitting
split Bregman (Goldstein and Osher) for anisotropic TV:
min α‖Du‖1 + β‖Ψu‖1 +12‖Au− f‖2
2
Introduce y = Du and w = Ψu, obtain
min α‖y‖1 + β‖w‖1 +12‖Au− f‖2
2, s.t. y = Du, w = Ψu
Augmented Lagrangian function:
L := α‖y‖1 + β‖w‖1 +12‖Au− f‖2
2 − p>(Du− y) +1
2µ‖Du− y‖2
2
−q>(Ψu− w) +1
2µ‖Ψu− w‖2
2

46/56
Variable splitting
The variable u can be otained by(A>A +
1µ
(D>D + I))
u = A>f +1µ
(D>y + Ψ>w) + D>p + Ψ>q
If A and D are diagonalizable by FFT, then the computationalcost is very cheap. For example, A = RF , both R and D arecirculant matrices.Variables y and w:
y := shrink(Du− µp, αµ)
w := shrink(Ψu− µq, αµ)
apply a few iterations before updating the Lagrangian multipliersp and q
Exercise: isotropic TV
min α‖Du‖2 + β‖Ψu‖1 +12‖Au− f‖2
2

47/56
FTVd: Fast TV deconvolution
Wang-Yang-Yin-Zhang consider:
minu
∑‖Diu‖2 +
12µ‖Ku− f‖2
2
Introducing w and quadratic penalty:
minu,w
∑(‖wi‖2 +
12β‖wi − Diu‖2
2
)+
12µ‖Ku− f‖2
2
Alternating minimization:For fixed u, {wi} can be solved by shrinkage at O(N)
For fixed {wi}, u can be solved by FFT at O(N log N)

48/56
Outline: Linearized ADMM
Linearized Bregman and Bregmanized operator splittingADMM + proximal point methodXiaoqun Zhang, Martin Burgerz, Stanley Osher, A unifiedprimal-dual algorithm framework based on Bregman iteration

49/56
Review of Bregman method
Consider BP:min ‖x‖1, s.t. Ax = b
Bregman method:
Dpk
J (x, xk) := ‖x‖1 − ‖xk‖1 −⟨pk, x− xk
⟩xk+1 := arg minx µDpk
J (x, xk) + 12‖Ax− b‖2
2
pk+1 = pk + 1µA>(b− Axk+1)
Augmented Lagrangian (updating multiplier or b):xk+1 := arg minx µ‖x‖1 + 1
2‖Ax− bk‖22
bk+1 = b + (bk − Axk+1)
They are equivalent, see Yin-Osher-Goldfarb-Darbon

50/56
Linearized approaches
Linearized Bregman method:
xk+1 := arg min µDpk
J (x, xk) + (A>(Axk − b))>(x− xk) +12δ‖x− xk‖2
2,
pk+1 := pk − 1µδ
(xk+1 − xk)− 1µ
A>(Axk − b),
which is equivalent to
xk+1 := arg min µ‖x‖1 +12δ‖x− vk‖2
2
vk+1 := vk − δA>(Axk+1 − b)
Bregmanized operator splitting:
xk+1 := arg min µ‖x‖1 + (A>(Axk − bk))>(x− xk) +12δ‖x− xk‖2
2
bk+1 = b + (bk − Axk+1)
Are they equivalent?

50/56
Linearized approaches
Linearized Bregman method:
xk+1 := arg min µDpk
J (x, xk) + (A>(Axk − b))>(x− xk) +12δ‖x− xk‖2
2,
pk+1 := pk − 1µδ
(xk+1 − xk)− 1µ
A>(Axk − b),
which is equivalent to
xk+1 := shrink(vk, µδ)
vk+1 := vk − δA>(Axk+1 − b)or
xk+1 := shrink(δA>bk, µδ)
bk+1 := b + (bk − Axk+1)
Bregmanized operator splitting:
xk+1 := shrink(xk − δ(A>(Axk − bk)), µδ) = shrink(δA>bk + xk − δA>Axk, µδ)
bk+1 = b + (bk − Axk+1)

51/56
Linearized approaches
Linearized Bregman:If the sequence xk converges and pk is bounded, then the limit ofxk is the unique solution of
min µ‖x‖1 +12δ‖x‖2
2 s.t. Ax = b.
For µ large enough, the limit solution solves BP.Exact regularization if δ > δ̄
What about Bregmanized operator splitting?

52/56
Primal ADMM for `1-regularized problem
Primal: min µ‖x‖1 + 12‖Ax− b‖2
2 which is equivalent to
min µ‖x‖1 +12‖r‖2
2, s.t. Ax− b = r.
Augmented Lagrangian function:
L(x, r, λ) = µ‖x‖1 +12‖r‖2
2 − λ>(Ax− b− r) +12δ‖Ax− b− r‖2
2
ADMM scheme:
xk+1 = arg minx
µ‖x‖1 +12δ‖Ax− b− rk − δλk‖2
2 original problem
rk+1 = arg minr
12‖r‖2
2 +12δ‖Axk+1 − b− r − δλk‖2
2
λk+1 = λk +Axk+1 − b− rk+1
δ

52/56
Primal ADMM for `1-regularized problem
Primal: min µ‖x‖1 + 12‖Ax− b‖2
2 which is equivalent to
min µ‖x‖1 +12‖r‖2
2, s.t. Ax− b = r.
Augmented Lagrangian function:
L(x, r, λ) = µ‖x‖1 +12‖r‖2
2 − λ>(Ax− b− r) +12δ‖Ax− b− r‖2
2
ADMM scheme:
xk+1 = arg minx
µ‖x‖1 + (gk)>(x− xk) +1
2τ‖x− xk‖2
2
rk+1 = arg minr
12‖r‖2
2 +12δ‖Axk+1 − b− r − δλk‖2
2
λk+1 = λk +Axk+1 − b− rk+1
δ
Convergence of the linearized scheme?

53/56
Generalized algorithm
Considermin f (x), s.t. Ax = b
Proximal-point method:
xk+1 := arg minx
f (x)−⟨λk,Ax− b
⟩+
12δ‖Ax− b‖2 +
12‖x− xk‖2
Q
Cλk+1 := Cλk + (b− Axk+1)
Augmented Lagrangian or Bregman method if Q = 0 and C = δ
Proximal point method by Rockafellar if Q = I and C = γ
Bregmanized operator splitting if Q = 1δ(I − A>A)
Theoretical results: limk ‖Axk − b‖2 = 0, limk f (xk) = f (x̄) and all limitpoint of (xk, λk) are saddle points.

54/56
Convergence proof
From the x-subproblem:
∂f (xk+1) 3 sk+1 := A>λk − 1δ
A>(Axk+1 − b)− Q(xk+1 − xk)
Assume (x̄, λ̄) is a saddle point, then Ax̄ = b, and s̄− A>λ̄ = 0.Let sk+1
e = sk+1 − s̄, xk+1e = xk+1 − x̄ and λk+1
e = λk+1 − λ̄:
sk+1e +
1δ
A>Axk+1e + Qxk+1
e = Qxke + A>λk
e, Cλk+1e = Cλk
e − Axk+1e
Taking the inner product with xk+1e on both sides of the first equality:
12
(‖xk+1
e ‖2Q + ‖xk+1 − xk‖2
Q − ‖xke‖2
Q
)= −
⟨sk+1
e , xk+1e
⟩− 1δ‖Axk+1
e ‖22 +
⟨λk
e,Axk+1e
⟩Taking the inner product with λk+1
e on both sides of the second equality:
12
(‖λk+1
e ‖2C − ‖λk
e‖2C − ‖Axk+1
e ‖2C−1
)= −
⟨λk
e,Axk+1e
⟩Adding the above inequality (wk = (xk, λk)):
‖wk+1e ‖2
Q + ‖xk+1 − xk‖2Q + 2
⟨sk+1
e , xk+1e
⟩+
2δ‖Axk+1
e ‖22 − ‖Axk+1
e ‖2C−1 = ‖wk
e‖2Q
55/56
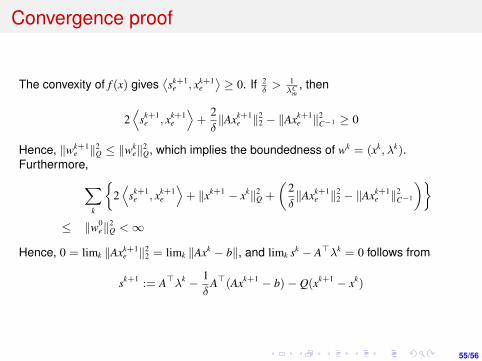
Convergence proof
The convexity of f (x) gives⟨sk+1
e , xk+1e⟩≥ 0. If 2
δ> 1
λCm
, then
2⟨
sk+1e , xk+1
e
⟩+
2δ‖Axk+1
e ‖22 − ‖Axk+1
e ‖2C−1 ≥ 0
Hence, ‖wk+1e ‖2
Q ≤ ‖wke‖2
Q, which implies the boundedness of wk = (xk, λk).Furthermore,∑
k
{2⟨
sk+1e , xk+1
e
⟩+ ‖xk+1 − xk‖2
Q +
(2δ‖Axk+1
e ‖22 − ‖Axk+1
e ‖2C−1
)}≤ ‖w0
e‖2Q <∞
Hence, 0 = limk ‖Axk+1e ‖2
2 = limk ‖Axk − b‖, and limk sk − A>λk = 0 follows from
sk+1 := A>λk − 1δ
A>(Axk+1 − b)− Q(xk+1 − xk)

56/56
Generalized algorithm
Considermin f (x) + g(z), s.t. Bx = z
Proximal-point method:
xk+1 := arg minx
f (x)−⟨λk,Bx
⟩+
12δ‖Bx− zk‖2 +
12‖x− xk‖2
Q
zk+1 := arg minz
g(z)−⟨λk, z
⟩+
12δ‖Bxk+1 − z‖2 +
12‖z− zk‖2
M
Cλk+1 := Cλk + (Bxk+1 − zk+1)
ADMM if Q = M = 0 and C = δ
Proximal point method by Rockafellar if Q = I and C = γ
Bregmanized operator splitting if Q = 1δ(I − A>A)
Theoretical results: limk ‖Bxk − zk‖2 = 0, limk f (xk) = f (x̄) ,limk g(zk) = g(z̄) and all limit point of (xk, zk, λk) are saddle points.









![Message Passing Algorithms for Compressed SensingarXiv:0907.3574v1 [cs.IT] 21 Jul 2009 Message Passing Algorithms for Compressed Sensing David L. Donoho Department of Statististics](https://img.pdfslide.us/doc/110x75/5f449d12b1253e2f764e59d5/message-passing-algorithms-for-compressed-sensing-arxiv09073574v1-csit-21-jul.jpg)