Embed Size (px)
Citation preview

1
Lecture 2: The Human Visual System
(HVS)
(chapter 2)
GGS 680 1 Spring 2011
Human visual perception
Based on: • Human intuition • Subjective visual
judgment
But … • Robust • Fast • Reliable (?)
GGS 680 2 Spring 2011
The Human Eye Diameter: 20 mm
3 membranes enclose the eye • Cornea & sclera • Choroid • Retina
GGS 680 3 Spring 2011
The Human Eye The choroid contains blood vessels
for eye nutrition and is heavily pigmented to reduce extraneous light entrance and backscatter.
The ciliary body and the iris, which controls the amount of light that enters the eye • (diameter varies - 2 mm ~ 8 mm).
GGS 680 4 Spring 2011
The Lens The lens is made up of concentric layers of
fibrous cells and is suspended by fibers that attach it to the ciliary body.
It is slightly yellow and absorbs approx. 8% of the visible light spectrum.
The “focal length” is controlled by the radius of the lens (a flexible lens!)
GGS 680 5 Spring 2011
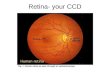
The Retina The retina lines the entire
posterior portion.
Discrete light receptors are distributed over the surface of the retina:
• cones (6-7 million per eye)
• rods (75-150 million per eye)
GGS 680 6 Spring 2011

2
Cones
Cones are located in the fovea and are sensitive to color. • Recent research has indicated the existance of 3
types of cones: “R” cones, “G” cones, “B” cones.
Each one is connected to its own nerve end.
Cones are responsible for photopic vision (or bright-light vision).
GGS 680 7 Spring 2011
Rods
Rods are giving a general, overall picture of the field of view and are not involved in color vision.
Several rods are connected to a single nerve and are sensitive to low levels of illumination
Rods are responsible for scotopic vision (dim-light vision).
GGS 680 8 Spring 2011
Cones and Rods
GGS 680 9 Spring 2011
Receptor Distribution
The distribution of receptors is radially symmetric about the fovea.
Cones are most dense in the center of the fovea while rods increase in density from the center out to approximately 20% off axis and then decrease.
GGS 680 10 Spring 2011
Receptor Distribution
GGS 680 11 Spring 2011
The Fovea The fovea is circular (1.5 mm in diameter) but can be
assumed to be a square sensor array (1.5 mm x 1.5 mm).
The density of cones: 150,000 elements/mm2 ~ 337,000 for the fovea.
A CCD imaging chip of medium resolution requires approximately 5 mm by 5 mm for this number of elements …
GGS 680 12 Spring 2011

3
Image formation in the eye
GGS 680 13 Spring 2011
Image Formation in the Eye
Distance between the center of the lens and the retina (focal length): • varies from 17 mm to 14 mm (refractive power
of lens goes from minimum to maximum).
Objects farther than 3 m use minimum refractive lens powers (and vice versa).
GGS 680 15 Spring 2011
Image Formation in the Eye Calculation of retinal image of an object and the visual angle
1710015 x
= mmx 55.2=
€
A = tan−1 15100⎛
⎝ ⎜
⎞
⎠ ⎟ = 8.53deg
GGS 680 16 Spring 2011
Image Formation in the Eye
Perception takes place by the relative excitation of light receptors.
These receptors transform radiant energy into electrical impulses that are ultimately decoded by the brain.
GGS 680 17 Spring 2011
Brightness Adaptation & Discrimination
The HVS can adapt to a wide range of light intensity levels - on the order of 1010.
Daylight 105
Indoors light 102 moonlight 10-1
starlight 10-4
GGS 680 18 Spring 2011
Dealing with a high dynamic range Subjective brightness (i.e. intensity as
perceived by the HVS) is a logarithmic function of the light intensity incident on the eye.
GGS 680 19 Spring 2011

4
Brightness Adaptation & Discrimination
The HVS cannot operate over such a range simultaneously.
For any given set of conditions, the current sensitivity level of HVS is called the brightness adaptation level (Ba).
GGS 680 20 Spring 2011
Brightness Adaptation & Discrimination
The eye also discriminates between changes in brightness at any specific adaptation level.
Where: ΔIc is the increment of illumination discriminable 50% of the time, and I is the background illumination
GGS 680 21 Spring 2011
Brightness Adaptation & Discrimination
Small values of Weber ratio mean good brightness discrimination (and vice versa).
At low levels of illumination brightness discrimination is poor (rods) and it improves significantly as background illumination increases (cones).
GGS 680 22 Spring 2011
Brightness Adaptation & Discrimination
The typical observer can discern one to two dozen different intensity changes
• i.e. the number of different intensities a person can detect at any given point in a monochrome image
• As the eye roams around, different conditions are formed and different set of intensities become apparent.
GGS 680 23 Spring 2011
Brightness Adaptation & Discrimination
Overall intensity discrimination is broad due to different set of incremental changes to be detected at each new adaptation level.
Perceived brightness is not a simple function of intensity • Perceived brightness • Simultaneous contrast
GGS 680 24 Spring 2011
Perceived Brightness
GGS 680 25 Spring 2011

5
Simultaneous Contrast
GGS 680 26 Spring 2011
Image Acquisition
(Chapter 2, cont.)
GGS 680 31 Spring 2011
The image acquisition process
GGS 680 32 Spring 2011
The spectrum
GGS 680 33 Spring 2011
Characteristics of light sources Light sources:
• Radiance: The total amount of energy that flows from a source.
• Luminance: The amount of intensity that is observed from a light source or a surface.
• Brightness: a subjective measure of light perception.
Luminance is an objective term.
Brightness is a subjective term.
GGS 680 34 Spring 2011
Luminance
Let L(λ) be an EM energy source Let V(λ) be the sensor sensitivity
function Then the Luminance is:
I[lumen]=∫λL(λ)V(λ)dλ
energy
λ
L(λ) V(λ)
GGS 680 35 Spring 2011

6
Principal Sensor arrangements
GGS 680 36 Spring 2011
Source: Fossum, 1998
(pixel size 7.9 x 7.9 micron)
Sensors: CCD A CCD has sensor elements (sels),
arranged in a 2D array.
Each sel is comprised of a photodiode that converts light into charge (electrons) and a charge holding region
After the sensor is exposed, each row of sensors moves its charge to a register. Charges are then amplified and converted to voltage.
Pros: • A very mature technology (~25 years) • Low noise
Cons: • A more complex reading mechanism & control • Higher power consumption
Camera control
Source: Photonics spectra (2001)
GGS 680 37 Spring 2011
Sensors: CMOS A CMOS has sensor elements (sels),
arranged in a 2D array. Each sel is comprised of a photodiode that converts light into charge (electrons) and a charge-to-voltage converter.
Each sel is indexed, sels are read through a row and column decoders
Pros: • A CMOS can be easily integrated and
fitted on a single silicon chip • Lower power consumption
Cons: • CMOS has only begun mass production • More difficult to “pack” sels
Camera control
Source: Photonics spectra (2001)
Camera control
GGS 680 38 Spring 2011
Source: Fossum, 1998
Super CCD (Fuji)
GGS 680 40 Spring 2011
Super CCD (Fuji)
GGS 680 41 Spring 2011
Capturing images in 2D/3D
Microdensitometers Sensor strips (linear, circular) Sensor arrays Mirror scanning
GGS 680 42 Spring 2011

7
A Simple Image Model
Image: a 2-D light-intensity function f(x,y)
The value of f at (x,y) the intensity (“brightness”) of the image at that point
0 < f(x,y) < ∞
GGS 680 43 Spring 2011
A Simple Image Model
Nature of f(x,y):
• The amount of source light incident on the scene being viewed
• The amount of light reflected by the objects in the scene
GGS 680 45 Spring 2011
A Simple Image Model
Given the illumination & reflectance components: • Illumination: i(x,y) • Reflectance / absorption: r(x,y)
The image f(x,y) is given by:
f(x,y) = i(x,y) ⋅ r(x,y) where: 0 < i(x,y) < ∞ and 0 < r(x,y) < 1 (total reflectance) (total absorption)
GGS 680 46 Spring 2011
Illumination & Reflectance
Sample values of r(x,y): • 0.01: black velvet • 0.65: stainless steel • 0.93: snow
Sample values of i(x,y): • 10000 lm/m2 : cloudy day • 1000 lm/m2: office illumination • 0.1 lm/m2 : full moon
GGS 680 47 Spring 2011
A Simple Image Model (cont.) Intensity of a monochrome image f at (x0,y0): l=f(x0, y0)
Lmin ≤ l ≤ Lmax
Where Lmin is positive and Lmax is finite
In practice: • Lmin = imin rmin • Lmax = imax rmax
For example, in an indoor image: • Lmin ≈ 10 Lmax ≈ 1000
We will consider the range [Lmin, Lmax] as gray levels:
• Often shifted to [0,L-1] l=0: “black” and l=L-1: “white”
GGS 680 48 Spring 2011
Sampling & Quantization
The spatial and amplitude digitization of f(x,y) is called:
• image sampling when it refers to spatial coordinates (x,y) and
• gray-level quantization when it refers to the amplitude of f(x,y).
GGS 680 49 Spring 2011

8
Sampling & Quantization
GGS 680 50 Spring 2011
Sampling & Quantization
GGS 680 51 Spring 2011
Sampling & Quantization: Representing digital images
x and y should not be confused with the values of physical coordinates when the image was sampled
GGS 680 52 Spring 2011
Sampling & Quantization: Representing digital images
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
−
−
=
)1,1(...)1,1()0,1(............
)1,1(......)0,1()1,0(...)1,0()0,0(
),(
MNfNfNf
MffMfff
yxf
Digital Image Picture Elements (Pixels)
GGS 680 53 Spring 2011
Sampling & Quantization
Important terms for future discussion:
• Z: set of real integers
• R: set of real numbers
GGS 680 54 Spring 2011
Sampling & Quantization Sampling: partitioning xy plane into a grid
• the coordinate of the center of each grid is a pair of elements from the Cartesian product Z x Z (Z2)
Z2 is the set of all ordered pairs of elements (a,b) with a and b being integers from Z.
GGS 680 55 Spring 2011

9
Sampling & Quantization
f(x,y) is a digital image if:
• (x,y) are integers from Z2 and • f is a function that assigns a gray-level value
(from R) to each distinct pair of coordinates (x,y) [quantization]
But … gray levels are usually integers • then Z replaces R
GGS 680 56 Spring 2011
Sampling & Quantization
The digitization process requires to determine:
• The values of N and M
and
• The number of discrete gray levels allowed for each pixel.
GGS 680 57 Spring 2011
Sampling & Quantization
Usually, in DIP these quantities are integer powers of two:
N=2n M=2m and L=2k
(number of gray levels)
Another assumption is that the discrete levels are equally spaced between 0 and L-1 in the gray scale.
GGS 680 58 Spring 2011
Spatial and gray level resolution
An image is characterized by (M,N,L). What is the effect of each of these values?
Resolution – the smallest discernible detail an image can hold:
• Space - Spatial resolution • Spectrum - Spectral (gray level) resolution • Time - Temporal resolution
GGS 680 59 Spring 2011
Spring 2011
Spatial and Temporal Resolution
GGS 680 60
Source: Longley et al., 2006
Spatial and Spectral Resolution
Spectral Resolution Spatial Resolution
House House House
GGS 680 61 Spring 2011

10
Keeping pixel size constant by sub-sampling
Spatial resolution – example1
GGS 680 62 Spring 2011
Keeping image size constant by re-sampling
Spatial resolution – example1
GGS 680 63 Spring 2011
256 128
64 32
16 8
4 2
Spectral resolution - False contouring
GGS 680 64 Spring 2011
Resolution and memory If b is the number of bits required to store a
digitized image and k is the number of bits per pixel then:
• b = N x M x k (if M=N, then b=N2k)
GGS 680 65 Spring 2011
Memory / file size (Gray scale imagery)
GGS 680 66 Spring 2011
Measuring Resolution: example Spatial:
• Using line pairs: • Each pair consists of a line-space pair • The width of each pair is 2W
• Measured in lines per millimeter • The imaging system resolution is a combination of the lens
resolution and the film/sensor array resolution.
Spectral • For gray levels - 2k • For RGB images – 2k for each channel.
GGS 680 67 Spring 2011

11
Example: Resolution targets
USAF 1951 test target: • Five groups (-2,-1,0,1) • Each group contains six targets
• Three vertical lines • Three horizontal lines
• The number of lines per mm doubles with every 6th target
• The resolution of each target is given by:
• Where k is the group number and n is the target number
GGS 680 68 Spring 2011
Determining the resolution of an imaging system (film)
The actual resolution is computed by placing the imaging system in front of a target
Capturing an image Identifying the finest resolution target Using the nominal target resolution, compute the imaging system
resolution (lines/mm)
GGS 680 69 Spring 2011
ISO 12233
GGS 680 70 Spring 2011
Optimizing Sampling & Quantization How many samples and gray levels are
required for a good approximation?
• The resolution of an image depends N,M and k.
• The more these parameters are increased, the closer the digitized array approximates the original image.
GGS 680 71 Spring 2011
Optimizing Sampling & Quantization Is there an optimal N,M, and k values? What is the relation between the spatial
and radiometric resolution? One possible way to check this:
• Generate different versions (images) of the same image:
• Varying N, M • Varying k (number of bits per pixel) • Varying both
GGS 680 72 Spring 2011
Optimizing Sampling & Quantization
Isopreference curves (in the N-k plane)
• Each point: image having values of N and k equal to the coordinates of this point
• Points lying on an isopreference curve correspond to images of equal subjective quality.
GGS 680 73 Spring 2011

12
Optimizing Sampling & Quantization
GGS 680 74 Spring 2011
N N N
k k k
(a) (b) (c)
GGS 680 75 Spring 2011
As the level of detail increases, the curves become more vertical
The curves has a general tendency to shift right and upwards.
Isopreference Curves
GGS 680 76 Spring 2011
Optimizing Sampling & Quantization Conclusions:
• Generally, the subjective quality increases as N and k increases
• For images with small amounts of detail : as N increases k tends to decrease (higher contrast)
• For images with medium amounts of detail : the curves become more vertical (lower dependency on k)
• For images with large amounts of detail: the quality is nearly independent of k. • Only few gray levels are needed!
GGS 680 77 Spring 2011