Embed Size (px)
Citation preview
Lecture 19:Shortest Paths
Shang-Hua Teng
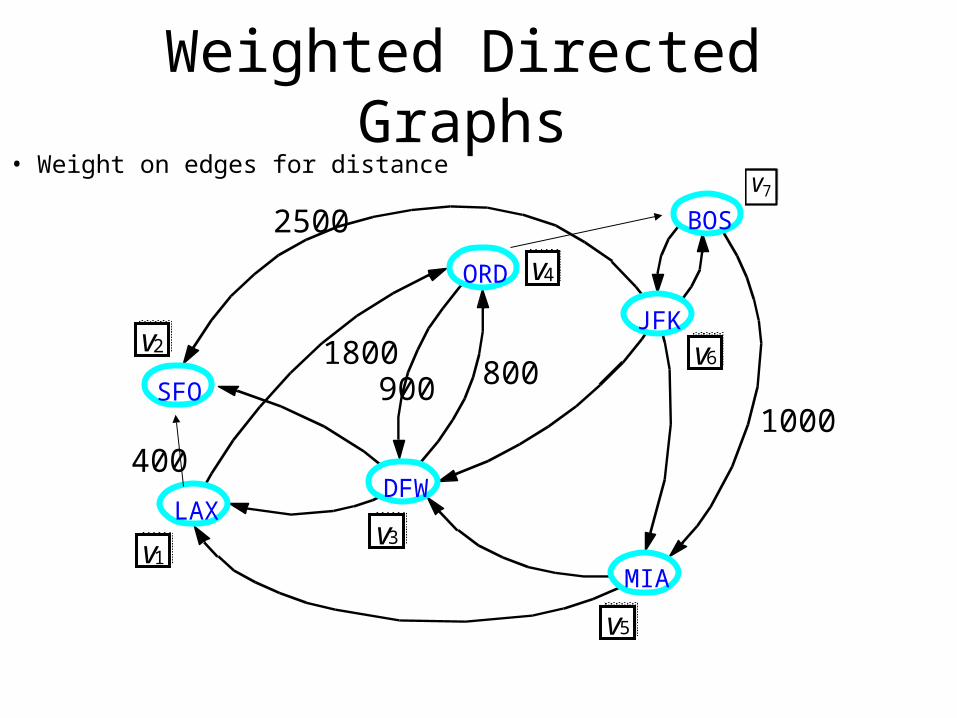
Weighted Directed Graphs• Weight on edges for distance
JFK
BOS
MIA
ORD
LAXDFW
SFO
v2
v1v3
v4
v5
v6
v7
400
2500
1000
1800800900
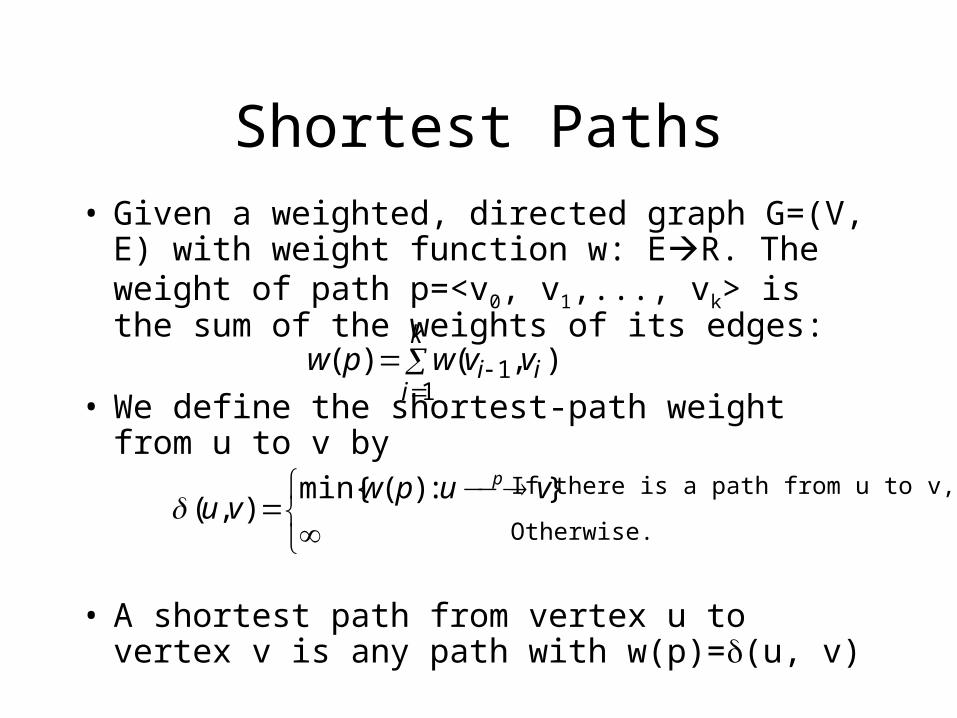
Shortest Paths• Given a weighted, directed graph G=(V, E) with
weight function w: ER. The weight of path p=<v0, v1,..., vk> is the sum of the weights of its edges:
• We define the shortest-path weight from u to v by
• A shortest path from vertex u to vertex v is any path with w(p)=(u, v)
k
iii vvwpw
11 ),()(
}:)(min{
),(
vupw
vup
If there is a path from u to v,
Otherwise.
Variants of Shortest Path Problem• Single-source shortest paths problem
– Finds all the shortest path of vertices reachable from a single source vertex s
• Single-destination shortest-path problem– By reversing the direction of each edge in the graph, we can
reduce this problem to a single-source problem
• Single-pair shortest-path problem– No algorithm for this problem are known that run
asymptotically faster than the best single-source algorithm in the worst case
• All-pairs shortest-path problem
Applications of Shortest Path• Every where!!!
– Driving (GPS)– Internet: network routing– Flying: Airline route– Resource allocation– VLSI design: wire routing– Computer Games– Mapquest, Yahoo map program
Optimal Substructure of Shortest-Paths
• Lemma: (Subpath of shortest paths are shortest paths).
• Let p=<v1, v2,..., vk> be a shortest path from vertex v1 to vk, and for any i and j such that 1 i j k, let pij = <v1i, v2,..., vj> be the sub-path of p from vertex vi to vj. Then pij is a shortest path from vertex vi to vj.
Algorithmic Impact
• Greedy
• Dynamic Programming
Negative-Weight Edges and Cycles
• In general, edges might have negative weights
• What if there is a negative-weight cycle
• No shortest path can contain a negative cycle
• Of course, a shortest path cannot contain a positive-weight cycle
Graph with Unit Weights
• Special case: All weights are 1
• The single source shortest path problem can be solved by BFS
• BFS tree explicit gives a shortest path from a source s to any vertex reachable from s
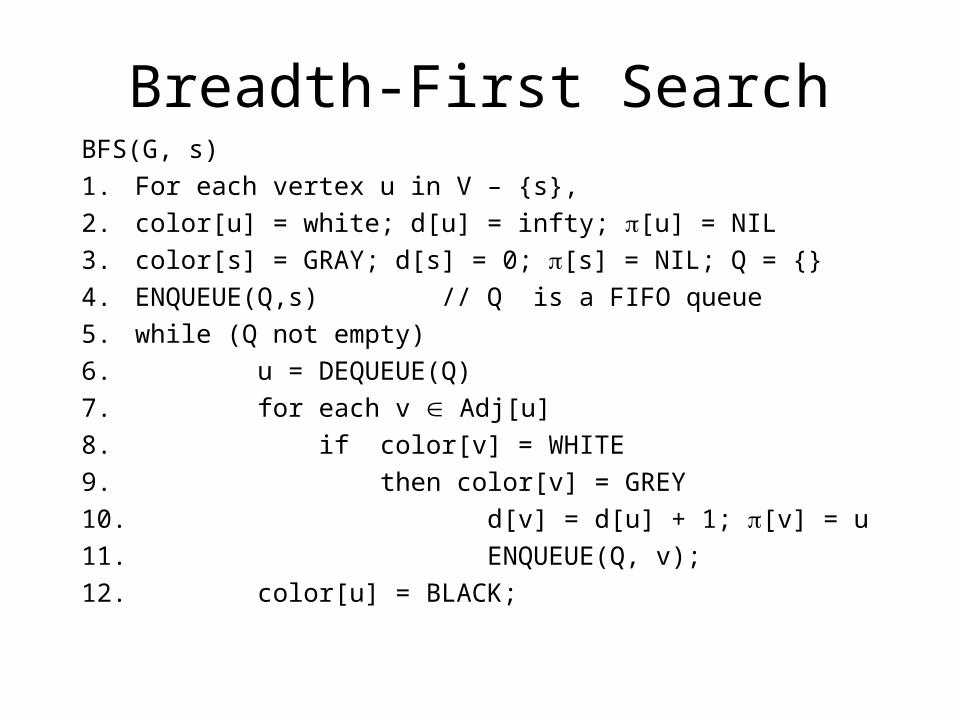
Breadth-First SearchBFS(G, s)
1. For each vertex u in V – {s},
2. color[u] = white; d[u] = infty; [u] = NIL
3. color[s] = GRAY; d[s] = 0; [s] = NIL; Q = {}
4. ENQUEUE(Q,s) // Q is a FIFO queue
5. while (Q not empty)
6. u = DEQUEUE(Q)
7. for each v Adj[u]
8. if color[v] = WHITE
9. then color[v] = GREY
10. d[v] = d[u] + 1; [v] = u
11. ENQUEUE(Q, v);
12. color[u] = BLACK;
Breadth-first Search
• Visited all vertices reachable from the root
• A spanning tree
• For any vertex at level i, the spanning tree path from s to i has i edges, and any other path from s to i has at least i edges (shortest path property)
Breadth-First Search: the Color Scheme
• White vertices have not been discovered– All vertices start out white
• Grey vertices are discovered but not fully explored– They may be adjacent to white vertices
• Black vertices are discovered and fully explored– They are adjacent only to black and gray vertices
• Explore vertices by scanning adjacency list of grey vertices
Graphs with Non-Negative Weights
• Shortest Path Tree
• Can we use a similar idea to generate a shortest path tree which represents the shortest path from s to all vertices that are reachable from s?
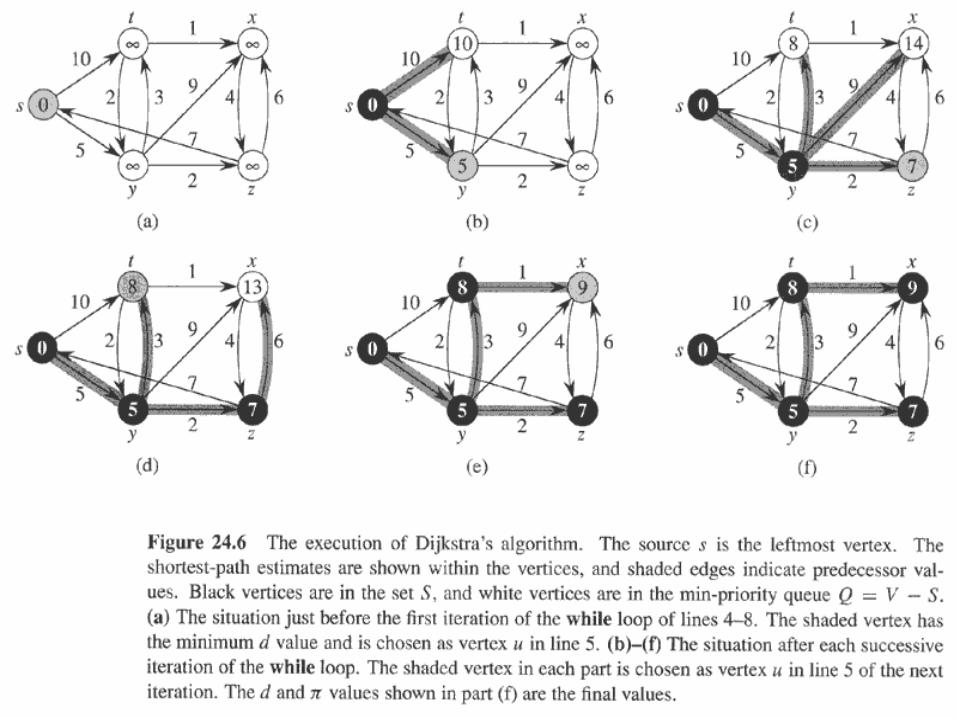
Dijkstra’s Algorithm• Solve the single-source shortest-paths problem on a
weighted, directed graph and all edge weights are nonnegative
• Data structure– S: a set of vertices whose final shortest-path weights have
already been determined– Q: a min-priority queue keyed by their d values
• Idea– Repeatedly select the vertex uV-S (kept in Q) with the
minimum shortest-path estimate, adds u to S, and relaxes all edges leaving u
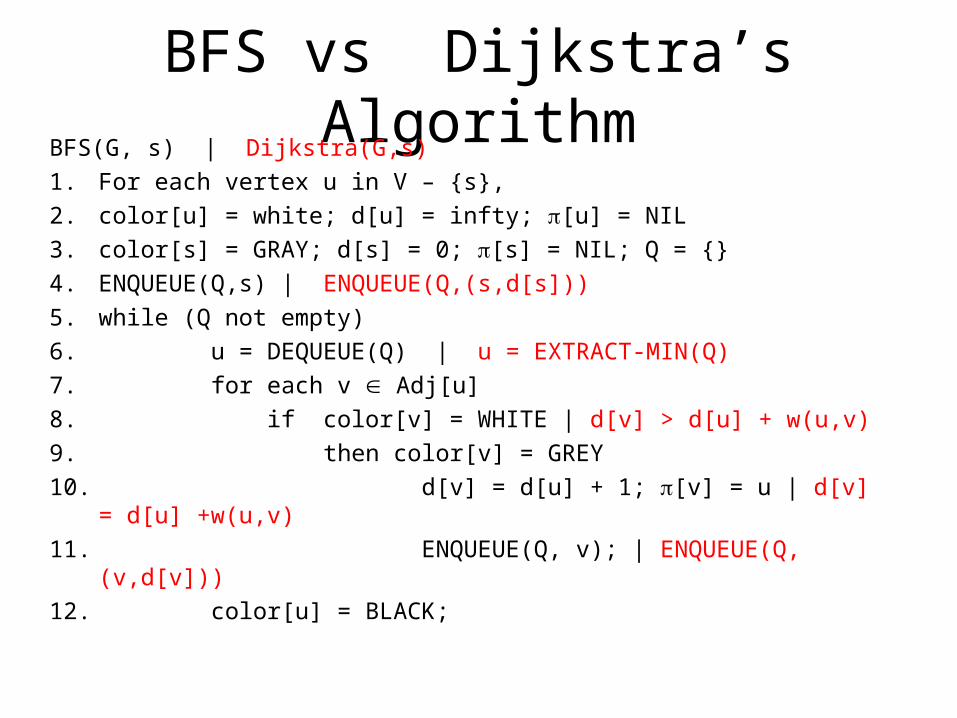
BFS vs Dijkstra’s AlgorithmBFS(G, s) | Dijkstra(G,s)
1. For each vertex u in V – {s},
2. color[u] = white; d[u] = infty; [u] = NIL
3. color[s] = GRAY; d[s] = 0; [s] = NIL; Q = {}
4. ENQUEUE(Q,s) | ENQUEUE(Q,(s,d[s]))
5. while (Q not empty)
6. u = DEQUEUE(Q) | u = EXTRACT-MIN(Q)
7. for each v Adj[u]
8. if color[v] = WHITE | d[v] > d[u] + w(u,v)
9. then color[v] = GREY
10. d[v] = d[u] + 1; [v] = u | d[v] = d[u] +w(u,v)
11. ENQUEUE(Q, v); | ENQUEUE(Q, (v,d[v]))
12. color[u] = BLACK;
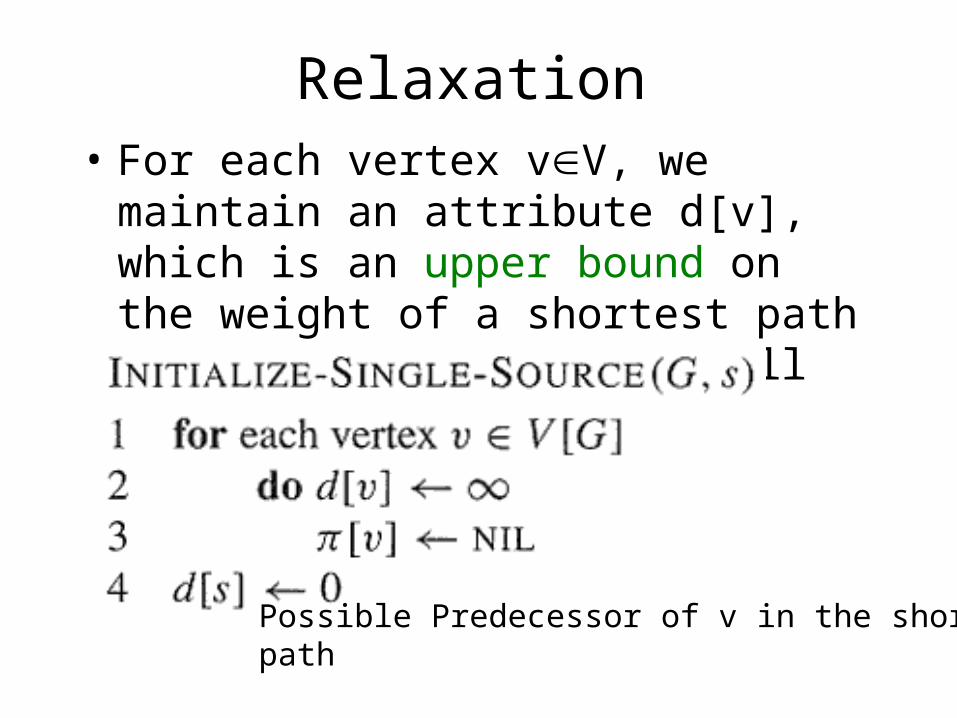
Relaxation• For each vertex vV, we maintain an
attribute d[v], which is an upper bound on the weight of a shortest path from source s to v. We call d[v] a shortest-path estimate.
Possible Predecessor of v in the shortest path
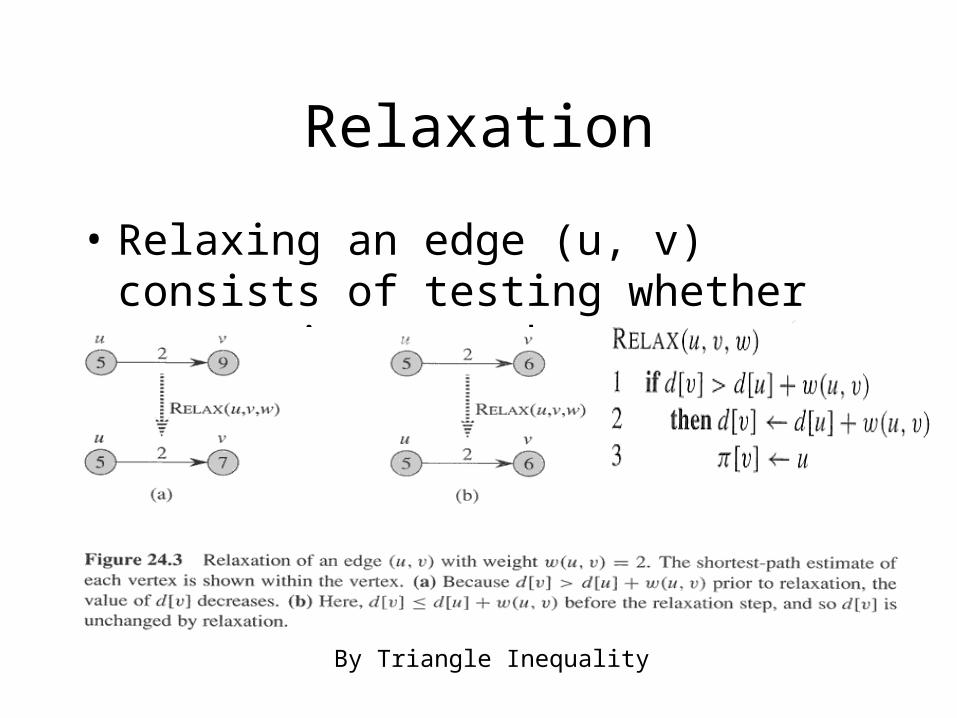
Relaxation
• Relaxing an edge (u, v) consists of testing whether we can improve the shortest path found so far by going through u and, if so, update d[v] and [v]
By Triangle Inequality
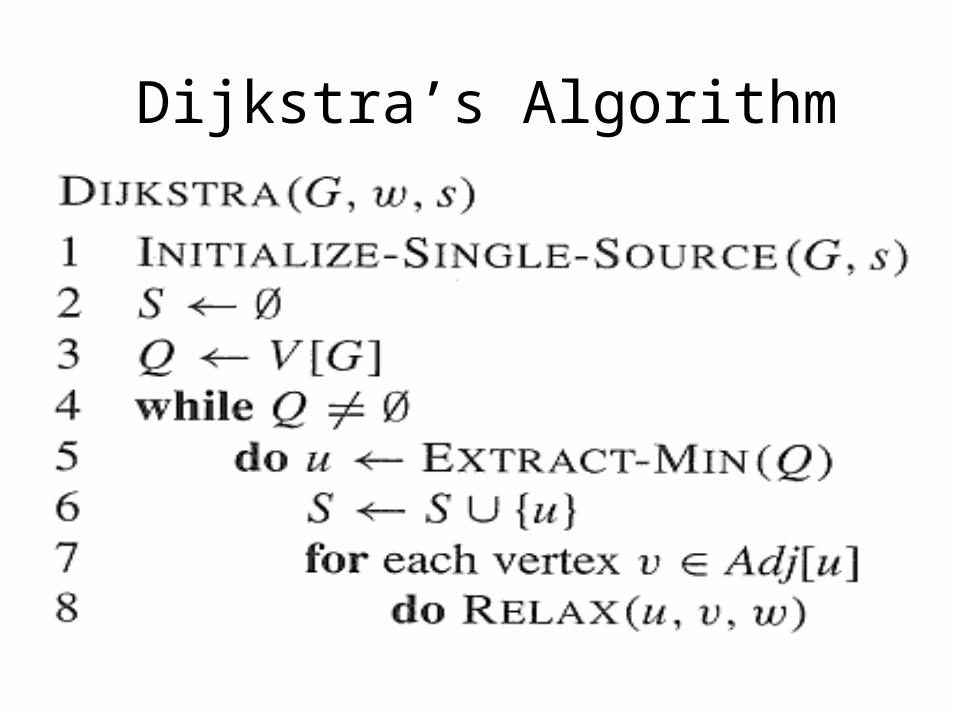
Dijkstra’s Algorithm
Properties of Shortest Paths
• Triangle inequality– For any edge (u,v) in E, (s,v) <= (s,u) + w(u,v)
• Upper bound property– d[v] >= (s,v)
• Monotonic property – d[v] never increase
• No-path property– If v is not reachable then d[v] = (s,v) = infty
Properties of Shortest Paths• Convergence property
– If (u,v) is on the shortest path from s to v and if d[u] = (s,u) at any time prior to relaxing (u,v), then d[v] = (s,v) at all time afterward
• Path-relaxation property– If p=< s=v0,v1, v2,..., vk> is the shortest path from s to vk
and edges of p are relaxed in order in the index, then d[vk] = (s, vk). This property holds regardless of any other relaxation steps that occur, even if they are intermixed with relaxations of the edges of p
Properties of Shortest Paths
• Predecessor-subgraph property– Once d[v] = (s,v), the predecessor subgraph is
a shortest-paths tree rooted at s
Analysis of Dijkstra’s Algorithm• Min-priority queue operations
– INSERT (line 3)– EXTRACT-MIN( line 5)– DECREASE-KEY(line 8)
• Time analysis– Line 4-8: while loop O(V)– Line 7-8: for loop and relaxation |E| – Running time depends on how to implement min-priority
queue• Simple array: O(V2+E) = O(V2)• Binary min-heap: O((V+E)lg V)• Fibonacci min-heap: O(VlgV + E)