Embed Size (px)
Citation preview

Lect16 EEE 202 1
System Responses
Dr. Holbert
March 24, 2008

Lect16 EEE 202 2
Introduction
• Today, we explore in greater depth the three cases for second-order systems– Real and unequal poles– Real and equal poles– Complex conjugate pair
• This material is ripe with new terminology

Lect16 EEE 202 3
Second-Order ODE
• Recall: the second-order ODE has a form of
• For zero-initial conditions, the transfer function would be
200
2
200
2
2
1
)(
)()(
)(2)(
sss
ssH
ssss
F
X
FX
)()()(
2)( 2
002
2
tftxdt
tdx
dt
txd

Lect16 EEE 202 4
Second-Order ODE
• The denominator of the transfer function is known as the characteristic equation
• To find the poles, we solve :
which has two roots: s1 and s2
02 200
2 ss
12
4)2(2, 2
00
20
200
21
ss

Lect16 EEE 202 5
Damping Ratio () andNatural Frequency (0)
• The damping ratio is ζ• The damping ratio determines what type of
solution we will obtain:– Exponentially decreasing ( >1)– Exponentially decreasing sinusoid ( < 1)
• The undamped natural frequency is 0
– Determines how fast sinusoids wiggle– Approximately equal to resonance frequency

Lect16 EEE 202 6
Characteristic Equation Roots
The roots of the characteristic equation determine whether the complementary (natural) solution wiggles
1
1
2002
2001
s
s

Lect16 EEE 202 7
1. Real and Unequal Roots
• If > 1, s1 and s2 are real and not equal
• This solution is overdamped
tt
c eKeKtx
1
2
1
1
200
200
)(

Lect16 EEE 202 8
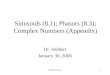
Overdamped
0
0.2
0.4
0.6
0.8
1
0.0E+00 5.0E-06 1.0E-05
Time
i(t)
-0.2
0
0.2
0.4
0.6
0.8
0.0E+00 5.0E-06 1.0E-05
Time
i(t)
Both of these graphs have a response of the formi(t) = K1 exp(–t/τ1) + K2 exp(–t/τ2)

Lect16 EEE 202 9
2. Complex Roots
• If < 1, s1 and s2 are complex
• Define the following constants:
• This solution is underdamped
tAtAetx
jss
ddt
c
d
d
sincos)(
,
1
21
21
20
0
Frequency) Natural (Damped
t)Coefficien (Damping

Lect16 EEE 202 10
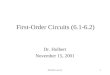
Underdamped
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1.00E-05 1.00E-05 3.00E-05
Time
i(t)
A curve having a response of the formi(t) = e–t/τ [K1 cos(ωt) + K2 sin(ωt)]

Lect16 EEE 202 11
3. Real and Equal Roots
• If = 1, then s1 and s2 are real and equal
• This solution is critically damped
ttc etKeKtx 00
21)(

Lect16 EEE 202 12
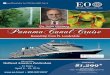
IF Amplifier Example
This is one possible implementation of the filter portion of an intermediate frequency (IF) amplifier
10
769pFvs(t)
i(t)
159H
+–

Lect16 EEE 202 13
IF Amplifier Example (cont’d.)
• The ODE describing the loop current is
• For this example, what are ζ and ω0?
)()()(
2)(
)(1)(
1)()(
2002
2
2
2
tftidt
tdi
dt
tid
dt
tdv
Lti
LCdt
tdi
L
R
dt
tid s

Lect16 EEE 202 14
IF Amplifier Example (cont’d.)
• Note that 0 = 2f = 2455,000 Hz)
• Is this system overdamped, underdamped, or critically damped?
• What will the current look like?
011.0μH159
102
rad/sec1086.2)pF769)(μH159(
11
0
60
20
L
R
LC

Lect16 EEE 202 15
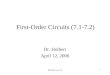
IF Amplifier Example (cont’d.)
• The shape of the current depends on the initial capacitor voltage and inductor current
-1
-0.8
-0.6
-0.4
-0.2
00.2
0.4
0.6
0.8
1
-1.00E-05 1.00E-05 3.00E-05
Time
i(t)

Lect16 EEE 202 16
Slightly Different Example
• Increase the resistor to 1k• Exercise: what are and 0?
1k
769pFvs(t)
i(t)
159H
+–

Lect16 EEE 202 17
Different Example (cont’d.)
• The natural (resonance) frequency does not change: 0 = 2455,000 Hz)
• But the damping ratio becomes = 2.2
• Is this system overdamped, underdamped, or critically damped?
• What will the current look like?

Lect16 EEE 202 18
Different Example (cont’d.)
• The shape of the current depends on the initial capacitor voltage and inductor current
0
0.2
0.4
0.6
0.8
1
0.0E+00 5.0E-06 1.0E-05
Time
i(t)

Lect16 EEE 202 19
Damping Summary
Damping Ratio
Poles (s1, s2) Damping
ζ > 1 Real and unequal Overdamped
ζ = 1 Real and equal Critically damped
0 < ζ < 1 Complex conjugate pair set
Underdamped
ζ = 0 Purely imaginary pair Undamped

Lect16 EEE 202 20
Transient and Steady-State Responses
• The steady-state response of a circuit is the waveform after a long time has passed, and depends on the source(s) in the circuit– Constant sources give DC steady-state responses
• DC steady-state if response approaches a constant
– Sinusoidal sources give AC steady-state responses• AC steady-state if response approaches a sinusoid
• The transient response is the circuit response minus the steady-state response

Lect16 EEE 202 21
Transient and Steady-State Responses
• Consider a time-domain response from an earlier example this semester
tt eetf 32
3
10
2
5
6
5)(
SteadyState
Response
TransientResponse
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4 5
TransientResponse
Steady-StateResponse

Lect16 EEE 202 22
Class Examples
• Drill Problems P7-6, P7-7, P7-8