Lance Ellerbe - BS EE Jamal Maduro - BS CpE Peter Rivera - BS
ME Anthony Sabido - BS ME 1
Slide 2
2
Slide 3
Project Overview Develop a self-contained network of tracked
surface drifters for near coastal application. Housing Electronics
Power System GPS receiver Radio transceiver Microcontroller Any of
these drifters within range of the base station will then be able
to send all the information from all other drifters, thus providing
a self-contained drifter network. Many such drifters are deployed
globally by the National Oceanic and Atmospheric Administration
(NOAA) as part of the world climate observation program. 3
Slide 4
4 *Picture courtesy of FSU Marine Lab
Slide 5
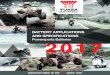
Operational Description 5 Client will take drifters out to the
Ochlocknee Bay and release drifters into the water a set time
intervals *Picture courtesy of FSU Marine Lab
Slide 6
Operational Description 6 Then the drifters will be recovered
based on pin pointed locations using the GPS and wireless
communication from one another. *Picture courtesy of FSU Marine
Lab
Slide 7
Electrical Components Microcontroller Radio Transceiver GPS
module Battery Data Logger 7
Slide 8
General Layout 8
Slide 9
Engineer: Jamal Maduro 9
Slide 10
Microcontroller 10 CriterionJustification Low operation voltage
that does not exceed 3.3V reduces energy consumption Analog to
digital (ADC) capabilities with a resolution of at least 8 bits
Allows the use of analog thermistors or other analog temperature
sensors; Allows for a temperature range of -128 to 127 Fahrenheit
or Celsius Dual Inline Packaging (DIP) Facilitates development
compatibility with standard breadboards and available low-cost
development kits At least 8 Kbytes of non-volatile memory, 256
Bytes of RAM, 16-bit registers Accommodates medium sized low power
programs; Accommodates higher accuracy floating point operations
(compared to 8-bit) At least 12 general purpose I/O pins Extends
the number of controllable devices Extends the number of available
interrupt sources Two universal serial interfaces are desired but
only one is mandatory Provides easy interface between
microcontroller radio module; Provides easy interface between
microcontroller and GPS module
Slide 11
Microcontroller 11 MSP430 Part # Non-Volatile Memory Capacity
Volatile SRAM General Purpose I/O pins ADC (bits) Register size
Price for Sort FR57258 kB (FRAM)1 kB16 10 SAR 16bit$2.05 G255316 kB
(Flash)512 B16 10 SAR 16bit$0.90 G24528 kB (Flash)256 B16 10 SAR
16bit$0.70
Slide 12
Microcontroller 12 MSP430 Part #Additional ProsCons FR5725
According to Texas Instruments FRAM has the following advantages
over flash: 1-- Consumes 250 times less power than flash: 9A
@12kB/s versus 220A @12kB/s for flash 2-- Unified memory block can
be dynamically configured as program, data, or info memory 3-- Can
write 100 times faster than flash: 1400kB/s @ 730A versus 12kB/s @
2200A 4-- Significantly larger write tolerance than flash: approx.
10 billion times more cycles 5-- Since it uses crystals instead of
charge it's not susceptible to radiation 6-- Higher security and
robustness due to its virtually undetectable write cycles 7-- Two
Universal Serial Connection Interfaces as opposed to only one 1--
Does not have a DIP version 2-- Out of Stock 3-- Not available
within time frame for this project G2553 1-- 20 pin DIP version
available 2-- Costs less then FRAM 3-- 5 power saving modes 4--
twice as much SRAM as the MPS430G2452 5-- 16MHz clock 6-- 16 kB
Flash allows for larger programs in necessary 1-- Only one
Universal Serial Interface (Tx Rx) G2452 1-- 20 pin DIP version
available 2-- Costs less then FRAM and MSP430G2553 3-- 5 power
saving modes 4-- Relatively less power consumption than the
MSP430G2452 5-- 16MHz clock 1-- Only one Universal Serial Interface
(Tx Rx)
Slide 13
13
Slide 14
Radio Transceiver 14 SUMMARRIZED FCC RULES AND REGULATIONS The
transmitter output power will be bounded to 1 watt (30 dBm)
Effective isotropic radiation power (EIRP) will be bounded to 4
watts (36 dBm) The maximum antennae gain cannot exceed 16 dBi If
the transmitter power is 30 dBm then for every 3 dBi over 6 dBi the
transmitter power must be reduce by 1 dBm The average time of
occupancy at any frequency must not be larger than 0.4 seconds
within any 10 second period. ** For FHSS capable systems
Slide 15
Radio Transceiver 15
Slide 16
Radio Transceiver 16 CriterionJustification Low operation
voltage that does not exceed 3.3Vreduces energy consumption FCC
compliant for the 915 MHz ISM bandavoid federal infractions and
penalties; keep network online Data rate must high enough to
transmit necessary information in a timely manner (does not violate
FCC rules and regulations) Reduces energy consumption; avoid
federal infractions and penalties; keep network online UART
communication capabilityallows microcontroller to easily interact
with radio module
Slide 17
Radio Transceiver 17 Xbee Model Operating Voltage (V) Line of
sight Range (km) Mesh Protocol Transmit Power (dBm) High Gain
Antenna Range (km) Transmit Current (mA) Receive Current (mA) RF
data rate Price Pro 9003.0 - 3.63Yes171021050 154.6 kbps $39.00 Pro
XSC (PCB mounted) 3.0 - 3.69.6Yes2015265659.6 kbps$39.00 Xtend2.8 -
5.524Yes306473080 9.6 kbps 155 kbps $179.0 0
Slide 18
18
Slide 19
GPS Module 19 $GPRMC, 123519, A, 4807.038, N, 01131.000, E,
022.4, 084.4, 230394, 003.1, W, *6A RMCRecommended Minimum sentence
C 123519Fix taken at 12:35:19 UTC AStatus A=active or V=Void.
4807.038,NLatitude 48 deg 07.038' N 01131.000,ELongitude 11 deg
31.000' E 22.4Speed over the ground in knots 84.4Track angle in
degrees True 230394Date 23rd of March 1994 003.1,WMagnetic
Variation *6AThe checksum data, always begins with *
Slide 20
GPS Criteria 20 CriterionJustification Low operation voltage
that does not exceed 3.3V reduces energy consumption Use NMEA
protocol easy to work with and interpret; appropriate for marine
use Customizable firmware control the output of the GPS data so the
microcontroller's work is reduced Fast (low) Cold, Warm, and Hot
startsreduces response time; reduces energy consumption UART
communication capability allows microcontroller to easily interact
with GPS module Accuracy must be within 5 meters increases the
chance of retrieval; decreases the time of retrieval; makes data
more reliable and usable
Slide 21
GPS Criteria 21 Part NameChip Set Hot/ Warm/ Cold Start (s)
Acquisitio n Sensitivity (dbm) Operating Voltage (V) Price Accuracy
(m) Interface Configurable firmware current draw (mA)
Venus634LPxVenus1/29/29-1612.8 - 3.6$39.002.5 (CEP)SPIyes28 Jupiter
F2 Sirf Star IV GSD4e 0.5/31/3 3 -1431.75 - 1.9$35.002.5 (CEP)
UART, SPI, I2C yes30
Slide 22
Engineer: Lance Ellerbe 22
Slide 23
Power Systems Overview Low Power Consumption Each must be able
to operate on 3.3V maximum. The drifter network will be designed to
use the least amount of power when transmitting data The power
supply will be selected in order to supply the adequate amount of
amp-hours in order to provide enough current for each electrical
component to be operational throughout its 15 day deployment.
23
Slide 24
Power Systems Current Component Selection PROGRESS: Xbee
Operation Voltage: 3.0 -3.6VDC Current Draw: Transmitting current:
256mA Receiving Current: 50 mA Transmission Frequency: every 2.16
min @ 10000 GPS fixes GPS module Will be selected for low power
consumption and operate at a maximum of 3.3V. (Based on chart on
previous slide the current drawn from GPS is approximately 29mA)
Microcontroller Operation Voltage: 1.8V to 3.6V Active mode: 230uA
Standby Mode: 0.5uA 24
Slide 25
Power Systems Testing/ Verification The testing of this task
will include a number of power consumption tests. First, each
electrical component will be attached separately to a multimeter or
oscilloscope to validate that the component is operating within its
electrical specifications. Second, based on the results in the
previous step the results can be then used to tweak network
parameters such as transmission time or microprocessor algorithms
in an attempt to lower power consumption and increase theoretical
operation time. 25
Slide 26
Power Systems Time of Operation 15 days of operation = 360
hours of operation Required GPS fixes: 10,000 Number of Fixes in 15
days: GPS fix every 2.16 min or 129.9 sec FCC rule: The average
time of occupancy at any frequency must not be larger than 0.4
seconds when using the frequency hopping spread spectrum. Maximum
current drawn per transmission/reception of all electrical
components: Approximately 336mA 26
Slide 27
Power Systems Worst Case Scenario: 0.4 sec for each
transmission/reception 336 mA for 1.11 hours of ACTIVE operation
sleep mode considered negligible (uA range). 336 mA 1.11 hours =
372.96 mAh Battery needed would be something with 3.3 V and greater
than 372.96 mAh 27
Slide 28
Power Systems Criteria for Making Battery Selection: Run Time
Volts (Power) Amp-Hour Rating Rechargeable Life Cycle Temperature
of Operation 28
Slide 29
Power Systems Power supply considerations: (1)Lithium Ion
Lithium Manganese Nickel Lithium Polymer Nickel Cadmium (NiCad)
Nickel Metal Hydride (NiMH) Photovoltaics 29
Slide 30
Power Systems Lithium Ion Battery: These batteries are able to
handle excessive current applications. Lithium batteries are great
for long-term use. Lithium batteries also perform well in extreme
temperatures. Increased life cycles over Nickel cadmium (NiCad) and
Nickel Metal Hydride (NiMH) batteries. Lithium ion batteries are
also cheaper to manufacture than lithium polymer batteries, so when
cost is a factor, lithium ion is the choice. Much lower
self-discharge rate than Nickel Metal Hydride (NiMH) batteries.
Wide variety of shapes and sizes efficiently fitting the devices
they power. 30
Slide 31
Power Systems Ideal Battery Configuration Parallel
configuration would be ideal to increase the amount of Amp- Hours
to supply the adequate amount of current to Microcontroller, GPS
module and Radio Transceiver for a 15 day period. 31 EXAMPLE
Slide 32
Power Systems Voltage regulation If battery chosen has a
nominal voltage of more than 3.3 V, a voltage regulator will need
to be implemented to maximize battery life and supply the correct
operating voltage to the components. 32
Slide 33
Power Systems PCB protection Lithium Ion batteries must connect
to a protection circuit module to protect Li-Ion Battery from
overcharge, over discharge and to prevent accidental battery
explosion due to its extra high energy density. 33
Slide 34
Power Systems LiMnNi Rechargeable 26650 Cell Nominal Voltage3.7
V Capacity 4000mAh (4.20V cut-off) Operation Temperature
Discharging: - 20 o C (-4F) - 60 o C (140F) Cell Max. Discharging
current 10 A Energy density 163.17 wh/kg 34 Xeno AA Size 3.6V
Lithium Battery XL- 060F Nominal Voltage3.7 V Capacity 2400mAh
(2.0V cut- off) Operation Temperature Discharging: -55 o C - 85 o C
(140F) Max. Discharging current 100mA Once all component selection
has been finalized, the battery will be chosen based the voltage
needed and the highest mAh that can be found.
Slide 35
Engineers: Anthony Sabido and Peter Rivera 35
Slide 36
Hull Design Increase water drag while decreasing wind drag
Watertight Resist corrosion in saltwater Survive light to medium
impacts on potentially sharp objects Easily duplicated 36
Slide 37
Legacy Casing 37 *Picture courtesy of FSU Marine Lab
Slide 38
Hull Design Semi-spherical shape. The electric components will
be stored in the center Top will be as flat as possible. 38
Slide 39
Hull Design 39 Low weight High stability Easy to Seal Easily
Fabricated Low Cost
Slide 40
Hull Components Base Lack of edges reduces snagging. 3 Piece
design reduces materials and simplifies fabrication. Allows for
foam filling. Top Flat panel top decrease vertical profile. Simple
sealing process. Quick component access. 40
Slide 41
Base 41
Slide 42
Exploded View 42 Six screws fasten the top to the base. Sealing
achieved by 1 main rubber seal and 6 rubber coated washers.
Slide 43
Hull Assembly 43
Slide 44
Issues Encountered Fastening Need aluminum ring to secure the
top. 44 Veck Female Bonding Fastener
Specifications Waterproof to 5m (CAP-04 & REQF-06). Low
profile to reduce wind drag (CAP-06). Painted to camouflage with
the water (CAP-07). Maximum weight of 0.5 kg (REQF-04). Overall
height less than 10 cm (REQF-05). 46
Slide 47
Hull Testing Water tightness Floatation 47
Slide 48
Hull Testing Vibration testing will be done on a vibration
table, where the drifter will be shaken at a variety of frequencies
for endurance. 48
54 Technical Report: Surface Circulation Study of Waters Near
Ochlockonee Bay, Florida - Peter Lazarevich and Dr. Kevin Speer
Project Description : Tracking the coastal waters: a wireless
network of shallow water drifters - FAMU-FSU College of
Engineering