Embed Size (px)
Citation preview

LAG CORRECTION IN AMORPHOUS SILICON FLAT-PANEL
X-RAY COMPUTED TOMOGRAPHY
A DISSERTATION
SUBMITTED TO THE DEPARTMENT OF ELECTRICAL
ENGINEERING
AND THE COMMITTEE ON GRADUATE STUDIES
OF STANFORD UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
Jared Starman
December 2010

http://creativecommons.org/licenses/by-nc/3.0/us/
This dissertation is online at: http://purl.stanford.edu/dj434tf8306
© 2011 by Jared Daniel Starman. All Rights Reserved.
Re-distributed by Stanford University under license with the author.
This work is licensed under a Creative Commons Attribution-Noncommercial 3.0 United States License.
ii

I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Rebecca Fahrig, Primary Adviser
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
John Pauly
I certify that I have read this dissertation and that, in my opinion, it is fully adequatein scope and quality as a dissertation for the degree of Doctor of Philosophy.
Norbert Pelc
Approved for the Stanford University Committee on Graduate Studies.
Patricia J. Gumport, Vice Provost Graduate Education
This signature page was generated electronically upon submission of this dissertation in electronic format. An original signed hard copy of the signature page is on file inUniversity Archives.
iii

Abstract
Advanced medical imaging techniques are now being used during patient treatment,
such as for image-guidance during minimally invasive procedures or for tumor localiza-
tion during radiation therapy. One promising fully 3-D x-ray technique is cone-beam
computed tomography (CBCT), which uses much of the same hardware as traditional
2-D x-ray fluoroscopy. The ability to perform CBCT scans has been driven by the
development of amorphous silicon (a-Si) digital flat-panel (FP) x-ray detector tech-
nology. These detectors were originally designed for radiography and fluoroscopy, but
because of their compactness, flexibility, low spatial distortion, and relative low-cost,
are also practical for CBCT.
One factor limiting the CBCT image quality for a-Si x-ray detectors is detector
lag, stemming from charge trapping in the a-Si layer. Lag is defined as residual signal
present in one frame but created in a previous frame. In CBCT reconstructions
detector lag can lead to a range of image artifacts, such as severe image shading for
elliptical or off-center objects that could potentially obscure anatomy of interest.
Current lag correction methods for a-Si FP detectors assume that the detector is
linear and time invariant (LTI) and determine a temporal impulse response for the
system. The detector output is deconvolved with the measured impulse response to
compute the lag-corrected data. However, as shown in this work, a conventional FP is
neither linear nor time invariant. Different techniques for measuring the FP impulse
response are examined, as well as their effect on the final CBCT image reconstruction.
A range of results are achieved by the different techniques, highlighting the non-
linearity and time variance of the system. A novel non-LTI algorithm is then presented
that better describes the x-ray detector dynamics. The non-LTI algorithm gives
iv

exposure independent results and provides significant error reduction in CBCT for
large objects where lag artifacts are most severe.
A second method to reduce lag based on a hardware change to the a-Si detector
is also described in this dissertation. The photodiode at each detector pixel is briefly
operated in a forward bias mode to maintain saturation of charge trap states. Detector
measurements and CBCT scans with and without the detector forward biasing are
made to show image improvement and the trade-offs of using the hardware method.
Finally, the forward bias method is compared to the non-LTI software algorithm and
a potential hybrid method is described.
v

Acknowledgements
First, I would like to sincerely thank my Ph.D. advisor, Rebecca Fahrig. When I first
spoke with her, she had no research funding. Just as it looked like I had exhausted
all the possible opportunities to stay for a Ph.D. at Stanford, she was able to provide
a spot for me at the last moment. Over the years that I have been a member of
her group, she has built up a great and supportive research lab, with cutting edge
equipment and fellow lab-mates that have been a pleasure to work with. In addition
to her kindness, encouragement, and all of the help that she has provided, I am deeply
thankful for Rebecca’s patience with me as a graduate student during my long tenure,
and her light, but ever constant pressure on me to keep making progress and get past
any road-blocks.
I would also like to express my gratitude to the other members of my Ph.D. oral
examination committee, Norbert Pelc, John Pauly, and Edward Graves. Over the
years that I have been a member of the lab, Norbert has provided invaluable insight
into x-ray physics and CT reconstruction in a highly informative and enjoyable way
that few other people in the world could match. I would like to thank John for the
excellent classes that he taught, which were were a large reason why I wanted to do
a Ph.D. in medical imaging. I am also very grateful that John let me TA for his
undergraduate signals and systems class. I gained a new appreciation for how much
work good professors like John put into teaching, and I got to see how rewarding
working with students can be. Finally, I would like to thank Ted for agreeing to chair
my defense, especially since this was his first committee to serve on.
I also want to acknowledge and thank the other current and past members of
Rebecca’s research group: Arun Ganguly, Robert Bennett, Lei Zhu, Sungwon Yoon,
vi

Norbert Strobel, Zhifei Wen, Angel Pineda, Lars Wigstrom, Erin Girard, Prasheel
Lillaney, Hewei Gao, Andreas Maier, Andreas Keil, Waldo Hinshaw, Mihye Shin,
Dragos Constantin, and Marlys Lesene. I am grateful for their support, friendship,
and for the opportunity to have worked with them. I would further like to give thanks
to the other members of the x-ray group, Sam Mazin, Taly Gilat-Schmidt, Jongduk
Baek, Adam Wang, and Scott Hsieh who helped provide many good discussions.
I also must thank many of the people at Varian Medical Systems, who are respon-
sible for my thesis topic which stems from my internship there during the summer
of 2005. Gary Virshup, Josh Star-Lack, Ed Shapiro, and Carlo Tognina all provided
me with a huge amount of support during and after my internship and were always
a pleasure to work with. I also would like to thank Steve Bandy, Larry Partain, Ivan
Mollov, Gerhard Roos, Rick Colbeth, and Mike Wright for their help over the years.
Many thanks to all of my friends at the Lucas Center. There are far too many
to name them all, but I would like to especially thank Kristin Granlund, Ernesto
Staroswiecki, Caroline Jordan, Pauline Worters, Lena Kaye, Rebecca Rakow-Penner,
Rachelle Bitton, Priti Balchandani, Kelly Townsend, Sarah Geneser, Tom Brosnan,
Fred Chin, Brian Hargreaves, and Donna Cronister among many others. I am also
grateful for all of the support from friends from EE, Stanford, and outside the uni-
versity, including Roxana Trofin, Annie Chern, Primoz Skraba, Pete Worters, Matt
Jennings, Jamie Kucher, and Kate Calvin.
A group of people that I would like to separately acknowledge are the roommates
that I have had over the years in graduate school who have also become some of my
closest friends. More than anyone else Geremy Heitz, Gary Chern, Paul Briant, Paul
Gurney, Andrea Golloher, Dan Halliday, Andrew Holbrook, Erin Girard, and Thad
Hughes have shaped my graduate student experiences.
Finally, I would like to thank my family. My grandparents have been wonderful
supporters of me over the years. Since I started college, my sister Nikki has become a
better friend and a source of many good things, including a large number of cookies
through the mail. I am very grateful that I got to spend the entire summer with her
and her husband Jon before graduate school, since it is an entirely different experience
getting to know siblings as an adult. I also need to thank Nikki for marrying Jon
vii

who, as the only other engineer in the family, filled the role of professional mentor
from time to time. Thank you also to my three nieces, Emma, Julia, and Josephine,
who have been born since I started Stanford. I wish that I could see them more
often, and I look forward to meeting the newest, Josephine, very soon. And finally,
thank you to my parents who have always placed my well-being and education above
everything else. While I could tell that they were disappointed to see me move so far
away from home, they have always fully supported all of my decisions and helped me
considerably in achieving my goals. Thank you for all of the love and attention that
you have given me throughout the years, and still give me today.
viii

Contents
Abstract iv
Acknowledgements vi
1 Introduction 1
1.1 X-ray Physics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Computed Tomography (CT) . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Amorphous Silicon (a-Si) Flat-Panel (FP) Detectors . . . . . . . . . . 6
1.3.1 Properties of amorphous silicon . . . . . . . . . . . . . . . . . 7
1.4 Lag Artifacts in FP Detectors . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Simulation of a-Si FP Detectors . . . . . . . . . . . . . . . . . . . . . 13
1.6 Other Detector Technologies . . . . . . . . . . . . . . . . . . . . . . . 15
1.7 Outline of Dissertation . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Linear Software Lag Corrections 19
2.1 Background and Theory . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.1 Hsieh LTI Algorithm for Lag Correction . . . . . . . . . . . . 20
2.1.2 Exponential Model Fitting . . . . . . . . . . . . . . . . . . . . 22
2.2 Methods and Materials . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.1 Step-Response Measurements . . . . . . . . . . . . . . . . . . 23
2.2.2 CBCT Measurements . . . . . . . . . . . . . . . . . . . . . . . 27
2.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.1 Step-Response Measurements . . . . . . . . . . . . . . . . . . 28
2.3.2 CBCT Measurements . . . . . . . . . . . . . . . . . . . . . . . 37
ix

2.4 Discussion and Conclusions . . . . . . . . . . . . . . . . . . . . . . . 41
3 Non-LTI Lag Corrections 45
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2 Methods and Materials . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.1 LTI Lag Theory . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.2 Non-LTI Lag Theory . . . . . . . . . . . . . . . . . . . . . . . 49
3.2.3 Weighting Only Non-LTI . . . . . . . . . . . . . . . . . . . . . 56
3.2.4 Calibration of Lag Correction Algorithm . . . . . . . . . . . . 56
3.2.5 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.3.1 Calibration of Lag Correction Algorithm . . . . . . . . . . . . 60
3.3.2 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.4 Discussion and Conclusions . . . . . . . . . . . . . . . . . . . . . . . 72
4 Forward Bias Lag Correction 77
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.2 Methods and Materials . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2.1 Forward Bias Evaluation with Visible Light . . . . . . . . . . 79
4.2.2 Lag Removal Measurements . . . . . . . . . . . . . . . . . . . 81
4.2.3 SNR, MTF, and DQE . . . . . . . . . . . . . . . . . . . . . . 82
4.2.4 Detector Mode Switching . . . . . . . . . . . . . . . . . . . . . 82
4.2.5 CBCT Reconstructions . . . . . . . . . . . . . . . . . . . . . . 83
4.2.6 CBCT Comparison to Non-LTI Software Method . . . . . . . 84
4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.3.1 Forward Bias Evaluation with Visible Light . . . . . . . . . . 84
4.3.2 Lag Removal Measurements . . . . . . . . . . . . . . . . . . . 88
4.3.3 SNR, MTF, and DQE . . . . . . . . . . . . . . . . . . . . . . 89
4.3.4 Detector Mode Switching . . . . . . . . . . . . . . . . . . . . . 93
4.3.5 CBCT Reconstructions . . . . . . . . . . . . . . . . . . . . . . 94
4.3.6 CBCT Comparison to Non-LTI Software Method . . . . . . . 94
4.4 Discussion and Conclusions . . . . . . . . . . . . . . . . . . . . . . . 96
x

5 Summary and Future Work 99
A Analytical model of a-Si FP with traps 102
B Wieczorek differential equation solution 106
Bibliography 108
xi

List of Tables
2.1 Exposure intensities and tube protocols for step-response experiments. 26
2.2 IRF parameters for FSRF data at 3.4% exposure. . . . . . . . . . . . 38
3.1 LTI IRF parameters from global calibration FSRF data at 27% exposure. 61
3.2 Summary of 1st and 50th frame residual lags. . . . . . . . . . . . . . 68
3.3 Summary of ROI errors for different lag correction algorithms. . . . . 72
4.1 Signal and noise values for 0.5 pF detector modes. . . . . . . . . . . . 89
xii

List of Figures
1.1 CT scanners. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Pixel circuit diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Structure and energy band diagram for crystalline silicon. . . . . . . . 10
1.4 Structure and density of states for amorphous silicon. . . . . . . . . . 11
1.5 Ghost images on a Varian 4030CB x-ray detector. . . . . . . . . . . . 12
1.6 Measured and ideal response of Varian 4030CB a-Si FP. . . . . . . . . 13
1.7 Reconstruction of simulated data without and with simulated detector
lag. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.8 Reconstruction and sinogram of pelvic phantom with shading artifact
due to lag. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.9 Comparison between CT and flat-panel reconstructions. . . . . . . . . 17
2.1 Residual error of multi-exponential model fit. . . . . . . . . . . . . . 29
2.2 Raw and normalized rising and falling step repsonses for several expo-
sure intensities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3 Number of estimated traps as a function of exposure, with linear fit to
low exposure data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Comparison of RSRF data at different frame rates. . . . . . . . . . . 32
2.5 Comparison of FSRF data at different frame rates. . . . . . . . . . . 33
2.6 Comparison of different spatial ROIs on IRF calibration. . . . . . . . 34
2.7 Comparison of different exposure intensities on IRF calibration. . . . 35
2.8 Comparison of different edge techniques on IRF calibration. . . . . . 36
2.9 Comparison of different irradiation lengths on IRF calibration. . . . . 37
xiii

2.10 Comparison of uncorrected and corrected CBCT reconstructions for
pelvic and head data. . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.11 Summary of ROI errors in CBCT experiments for different edge tech-
niques and exposures. . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.12 Difference images between no lag correction and best LTI correction. 41
3.1 Graphical depiction of LTI and non-LTI algorithms. . . . . . . . . . . 51
3.2 Flowchart of the non-LTI calibration algorithm. . . . . . . . . . . . . 57
3.3 Estimates of stored charge as a function of exposure with polynomial fit. 61
3.4 Exposure dependent rates with exponential fit. . . . . . . . . . . . . . 62
3.5 Effect of optimal exposure dependent rates on the RSRF. . . . . . . . 63
3.6 Spatial uniformity of lag. . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.7 Comparison of global versus ROI based LTI corrections. . . . . . . . . 65
3.8 Comparison of global versus ROI based non-LTI corrections. . . . . . 67
3.9 Comparison of different exposure intensities on the IRF calibration. . 68
3.10 Comparison of pelvic CBCT data. . . . . . . . . . . . . . . . . . . . . 70
3.11 Comparison of uniform acrylic head CBCT data. . . . . . . . . . . . 71
4.1 Circuit diagram of pixel with forward bias modification. . . . . . . . . 78
4.2 Forward bias current versus number of active rows. . . . . . . . . . . 85
4.3 Forward bias current versus voltage. . . . . . . . . . . . . . . . . . . . 86
4.4 Step-response improvement versus forward bias voltage and scan fre-
quency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.5 Comparison of FSRF and RSRF data for different amounts of charge
injection during forward bias under light irradiation. . . . . . . . . . . 87
4.6 Comparison of RSRF and FSRF measurements under x-ray irradiation. 88
4.7 Comparison of ghost images using forward bias correction. . . . . . . 90
4.8 Comparison of SNR measurements for the forward bias detector. . . . 91
4.9 MTF data for the forward bias detector. . . . . . . . . . . . . . . . . 92
4.10 DQE measurements for the forward bias detector. . . . . . . . . . . . 92
4.11 Mode switching experiments for the Varian 4030CB detector. . . . . . 93
4.12 Comparison of pelvic and head phantom CBCT reconstructions. . . . 95
xiv

4.13 Non-LTI software lag correction comparison for the pelvic phantom. . 96
xv

Chapter 1
Introduction
Years before the discovery of x-rays, doctors and engineers had tried to visualize inside
the human body. In 1881 Alexander Graham Bell attempted to use magnets and
sound waves to discover the location of the bullet that eventually killed U.S. President
James A. Garfield. When x-rays were finally discovered by Wilhelm Roentgen in
1895, they quickly found their way to medical applications within months [1]. The
importance of the discovery was further acknowledged by his winning the first Nobel
Prize in Physics in 1901. For the first time bones and metal objects could be visualized
prior to making an incision into the patient, creating a revolution in medicine.
1.1 X-ray Physics
X-rays, like light, are a form of electromagnetic radiation and can be treated as indi-
vidual photons. Compared to light, x-ray photons have much higher energy, typically
in the 20 keV to 140 keV range for medical applications. As x-rays travel through
a piece of material, they are absorbed or scattered by different atomic interactions.
The overall effect is that the number of x-rays exiting the material is reduced, or
attenuated, from the incident number. For a piece of uniform material of thickness
∆t, the relationship between the number of x-rays exiting and entering at a single
1

CHAPTER 1. INTRODUCTION 2
photon energy is well described by Beer’s Law,
I = I0e−µ∆t. (1.1)
Here µ is the x-ray attenuation coefficient for the material, I0 the number of x-rays
incident on the material, and I the number of x-rays exiting from the material. All
of the interactions that the x-rays undergo are represented by µ, including the pho-
toelectric effect, Compton scattering, and coherent scattering. Because the different
interactions are dependent on the energy of the x-rays, µ is also energy dependent.
However, given a polyenergetic beam of x-rays, Beer’s Law can be approximated as
I ≈ I0e−µavg∆t, (1.2)
where µavg is the attenuation coefficient of the specific material for the average energy
of the x-ray beam.
For two different materials, the x-rays exiting the first material become the x-rays
incident to the second material and Beer’s Law becomes
I = I0e−µavg1∆t1−µavg2∆t2 . (1.3)
As more materials are added and their thicknesses decreased, Eq.(1.3) becomes
I = I0e−
∫µdt. (1.4)
Here the subscript avg has been dropped because the energy dependence of µ can be
ignored for the purposes of this dissertation.
Rearranging Eq.(1.4), the line integral in the exponent can be isolated to obtain∫µdt = ln
(I0
I
). (1.5)
Eq.(1.5) shows that the line integral of attenuation coefficients can be expressed as the
natural logarithm of the ratio of measurable quantities, I0 and I. How the attenuation

CHAPTER 1. INTRODUCTION 3
coefficients are distributed along the line remains unknown though, with only the total
effect of the line integral directly observed.
1.2 Computed Tomography (CT)
Throughout the 1950s and 1960s, various attempts were made to build up more
detailed maps of the attenuation coefficients of objects. These attempts culminated
in the work of Godfrey Hounsfield in 1971 when he scanned the first patient on a
prototype computed tomography (CT) scanner that he developed at EMI. Just as
in the case of the discovery of x-rays, the importance of CT scanning was quickly
recognized in 1979, when Hounsfield and Alan Cormack won the Nobel Prize in
Physiology or Medicine for its invention.
Several different types of algorithms exist for transforming line integrals in Eq.(1.5)
to a reconstructed map, or image, of the attenuation coefficients of the object. For
reconstructing a single slice, a basic necessity is that all possible line integrals through
the object need to be measured. If the attenuation map to be reconstructed is denoted
as a 2-D function, f(x, y), the set of all collected projection measurements can be
written as,
g(r, θ) =
∫L(r,θ)
f(x, y)dxdy, (1.6)
=
∫ ∞−∞
∫ ∞−∞
f(x, y)δ(xcosθ + ysinθ − r)dxdy. (1.7)
Here, δ() is the Dirac function and L(r, θ) denotes the line of integration. The line
is defined by its radial distance from the origin, r, and the angle it makes with the
positive x-axis, θ. If a set of rays are collected and grouped together for a specific
θ and all r, this is termed a parallel x-ray projection, gθ(r). When all of the x-ray
projections from each angle are grouped together and ordered by angle, this is known
as an x-ray sinogram. To reconstruct f(x, y) from a complete sinogram, an algorithm
called filtered backprojection is commonly used. More about filtered backprojection
and useful variants can be found in Kak and Slaney [2]. The principle of the filtered

CHAPTER 1. INTRODUCTION 4
backprojection algorithm is the following:
1. Filter each individual 1-D projection with the 1-D function appropriate for the
geometry [2], commonly known as the ρ filter.
2. Backproject each filtered projection along the lines L(r, θ) from which the data
was originally collected to form a 2-D function.
3. Accumulate each of the 2-D backprojections to form the final reconstructed
image.
The pixel values in CT reconstructions are given in Hounsfield units (HU) to form
fHU(x, y), instead of as direct attenuation coefficients that have units of cm−1. To
scale the CT reconstruction of the attenuation map, f(x, y) is transformed by
fHU(x, y) =1000× f(x, y)
µwater − µair− 1000, (1.8)
where µwater and µair are the attenuation coefficients of water and air. In the new
scaling, air is equal to -1000 HU and water is equal to 0 HU. For further reference,
soft tissue has values ranging from -100 to 60 HU and bone has values ranging from
250 to greater than 1000 HU [3].
Modern diagnostic CT scanners typically operate in a configuration known as a
third-generation scanner, where an x-ray source and a set of x-ray detectors rotate
together around the patient. At small angular increments around the patient, diver-
gent sets of x-ray line integrals are collected, that can either be rebinned to form a
parallel set of x-ray projections for the filtered backprojection algorithm, or a variant
of the filtered backprojection algorithm can be used for image reconstruction.
To reconstruct many cross-sectional slices through the patient, additional rows of
x-ray detectors can be added above and below the plane of rotation. Furthermore, if
the patient is moved through the imaging system, line integrals from a larger volume
of object can be obtained. If the exactly needed line-integrals are not measured, they
are interpolated from the closest ones that are measured. This is known as helical
scanning and more can be found in Kalender [4].

CHAPTER 1. INTRODUCTION 5
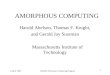
(a) (b)
Figure 1.1: (a) Toshiba diagnostic CT scanner with 320slices (http://medical.toshiba.com/products/ct/multidetector/aquilion-premium.php) (b) Siemens zee system used for interventional radiology.(http://www.medical.siemens.com/)
An example of a modern third-generation CT scanner is shown in Figure 1.1(a).
The scanner shown has 320 rows of detectors that allow simultaneous acquisition of
projection data from a large volume of the patient. Note, a feature of this system is
the closed bore structure that allows the detector and source to rotate quickly, stably,
and safely around the patient at speeds on the order of three rotations per second [5].
It is often useful to have the ability to perform CT reconstructions during different
interventional procedures. However, many procedures require open access to the pa-
tient or can not afford a large increase in the overall system cost, thus eliminating the
possibility of using the traditional closed bore CT structure. In response, cone-beam
CT (CBCT) using large-area flat-panel detectors has been developed. An example of
a CBCT system that is used for angiography is the Siemens zee system, shown in Fig-
ure 1.1(b). The FDK algorithm, which is an extension of the filtered backprojection
algorithm, is often used for 3-D reconstructions from circular trajectories [6].

CHAPTER 1. INTRODUCTION 6
Figure 1.2: Circuit diagram of a pixel for a flat-panel detector. A typical configurationhas each pixel made up of a photodiode and switch to connect the pixel to off-sensorreadout electronics.
1.3 Amorphous Silicon (a-Si) Flat-Panel (FP) De-
tectors
Beginning in the 1980s [7, 8], flat-panel (FP) x-ray detectors were developed for
radiography and fluoroscopy purposes. They have also proved to be suitable for
CBCT applications for a variety of reasons, such as their compactness, flexibility, low
spatial distortion, and relative low-cost.
FP x-ray detectors can directly convert radiation to charge, such as for amorphous
selenium, or can first convert radiation to visible light, which is then converted to
electronic charge. The conversion to light is accomplished by a scintillator, typically a
phosphor such as CsI or a ceramic like gadolinium oxysulfide (GOS). The emitted light
creates electron-hole pairs in a photosensitive material, such as amorphous silicon (a-
Si), and is stored there until ready to be readout by the electronics. A typical circuit
is shown in Figure 1.2 where each pixel is made up of a photodiode and thin-film
transistor (TFT) that acts as a switch to the readout electronics.
For normal operation of a typical circuit, the photodiode in Figure 1.2 is reverse
biased by placing a negative voltage on the photodiode anode, relative to the cathode,

CHAPTER 1. INTRODUCTION 7
and disconnected from the readout electronics. In such a state, the photodiode acts as
a capacitor and stores a small amount of charge. Next, electron-hole pairs are created
in the photodiode by light photons coming from the scintillator. The electron-hole
pairs combine with the existing charge on the photodiode, decreasing the voltage
across its terminals. After irradiation has ceased, the TFT connects the pixel to
the readout electronics where current flows back onto the photodiode to restore the
original reverse-bias state. The readout electronics integrate and amplify the total
charge necessary to perform this action and convert this signal to a voltage for analog
to digital conversion.
1.3.1 Properties of amorphous silicon
The photodiode and TFT in Figure 1.2 for each pixel are manufactured from a-Si
as opposed to crystalline silicon. Amorphous silicon has certain advantages over
crystalline silicon, namely radiation resistance and the ability to manufacture large
image sensors (40 × 30 cm and larger) [9]. One major disadvantage of amorphous
silicon stems from its electronic properties, which makes it difficult or impossible to
reliably manufacture additional transistors at each pixel. Because of this, all signal
amplification occurs off-pixel and additional electronic noise is added to the signal.
The added noise can rival the inherent quantum noise in collected x-ray data for very
low exposure data, thus degrading the collected image or requiring a higher x-ray
dose to be used.
Differences in the electronic properties between crystalline and amorphous sili-
con exist and are a result of the structural differences between the two materials.
Crystalline silicon forms a very rigid crystal structure with well-defined bond lengths
between neighboring atoms. Figure 1.3(a) shows a network representation of the rigid
crystal structure, highlighting that all silicon atoms form covalent bonds, with very
few exceptions, with exactly four neighboring atoms and that the bond lengths are
identical or nearly the same. Note, the accurate bond angles and three-dimensional
structure of the crystal are not represented.

CHAPTER 1. INTRODUCTION 8
Some of the electronic properties of crystalline silicon can be understood by ex-
amining the energy band diagram for silicon in Figure 1.3(b). For a semiconductor
such as pure crystalline silicon, all electron states in the valence band are filled and
all states in the conduction band are empty. A band gap exists between the valence
and conduction bands in which there are no available states for electrons. For silicon
doped with either a p-type or n-type material, either empty states will exist in the
valence band (holes), or excess electrons will be present in the conduction band. Elec-
trons that exist in the valence band are tightly held by the semiconductor, but those
that exist in the conduction band are free to move about. Electrons in the valence
band must attain excess energy equal to or greater than the band gap energy distance
to be promoted to the conduction band. For crystalline silicon, the band gap energy
is 1.1 eV. The energy that promotes electrons can be either thermal energy or energy
absorbed from light photons.
Within the conduction and valence bands, the density of available electron states
is not uniform. The state density distributions in the conduction band (gc(E)) and
the valence band (gv(E)) are
gc(E) =m∗n√
2m∗n(E − Ec)π2h̄3 , E ≥ Ec (1.9)
gv(E) =m∗p
√2m∗p(Ev − E)
π2h̄3 , E ≤ Ev (1.10)
where m∗n is the electron effective mass, m∗p is the hole effective mass, Ec and Ev are
the energies of the conduction and valence band edges, and h̄ is Planck’s constant
divided by 2π. The state densities for the conduction and valence bands are shown
as dashed lines in Figure 1.3(b).
Given excess electrons in the conduction band (or conversely, holes in the valence
band), states closer to the band edge are more likely to be filled with a charge carrier.
For charge carriers at equilibrium in a material, the probability of states at a specific
energy level to be filled is determined by the Fermi function,
f(E) =1
1 + e(E−EF )/kT(1.11)

CHAPTER 1. INTRODUCTION 9
where k is the Boltzmann constant, T is temperature, and EF is the Fermi level.
The Fermi level determines the midpoint of the Fermi function. For an intrinsic
semiconductor, the Fermi level is in the middle of the band gap, but for a doped
semiconductor, the level will move closer to the valence or conduction band edge,
depending on the type of doping. The overall distribution of charge carriers within
the semiconductor is the multiplication of the density of states from Eqs.(1.9)-(1.10)
and the Fermi function in Eq.(1.11).
In contrast to crystalline silicon, a-Si lacks a rigid crystal structure and the dis-
tance between neighboring atoms is far less precisely defined, which is represented by
the 2-D network structure in Figure 1.4(a). Most atoms still covalently bond with
four neighboring silicon atoms, but some bond with three or fewer neighbors. Fur-
thermore, there is a much broader distribution of bond lengths between neighboring
silicon atoms, and this results in a spreading of possible electronic states past the
conduction and valence band edges into the band gap. The absence of well-defined
edges makes the band gap energy more difficult to precisely define, but it is usually
taken as 1.7 eV, larger than that of crystalline silicon [10].
The bonding defects (i.e., bonding to fewer than four neighbors) create localized
defect states in the middle of the band gap for a-Si. This effect, along with the
band-tail spreading, is shown in Figure 1.4(b). For reference, the density of states
for crystalline silicon is also shown as a dashed line. In combination, the long band
tails and the defect states create available electronic states known as charge traps, or
simply just traps.
During device operation, the traps fill with charge from the conduction band, thus
reducing the sensitivity of the photodiode. As traps fill with charge, there will be
fewer available trap states for subsequent charge to fill. This manifests itself as an
increasing gain of the device. Furthermore, the trap states will eventually release
their charge at a time after it was created. The rates of trap emptying (Rα) and trap
filling (Rβ) at a specific energy level Etr in a-Si are described by Wiecorek [11] as
Rα(Etr) = ν0e−(Ec−Etr)/kTNt(Etr)f(Etr) (1.12)
Rβ(Etr) = ν0e−(Ec−EFn)/kTNt(Etr)[1− f(Etr)], (1.13)

CHAPTER 1. INTRODUCTION 10
(a) (b)
Figure 1.3: (a) Rigid network structure for crystalline silicon where each atom bondsto four neighboring atoms with well-defined bond lengths. (b) Energy band diagramfor crystalline silicon.
whereNt(Etr) is the trap state density, f(Etr) is the trap occupation function (which is
FFermi under equilibrium conditions), ν0 is the attempt-to-escape frequency, and EFn
is the quasi-Fermi level. The quasi-Fermi level describes the statistical distribution
of charge carriers under non-equilibrium conditions. The amount of charge that is
deposited into and released from the trap states during a given time period depends on
several parameters, including the trap density, illumination intensity, and the current
state of the traps (i.e., the previous irradiation history of the panel) [11].
1.4 Lag Artifacts in FP Detectors
The trapping and releasing of charge in a-Si is responsible for history-dependent
detector gain [12] and detector lag inside a-Si FP detectors. Detector lag is defined as
signal present in frames following the frame in which it was generated. In projections,
lag causes temporal blurring and reduces temporal resolution. For a-Si FPs designed
to be used for mixed radiography and fluoroscopy applications, lag can cause severe
ghosting of the high dose radiography image during low dose fluoroscopy [13, 14, 15].

CHAPTER 1. INTRODUCTION 11
(a) (b)
Figure 1.4: (a) Network structure for an amorphous material where the atoms repre-sented in black bond to four neighbor, in gray to three neighbors, and in white onlyto one neighbor. (b) Schematic density of states showing the conduction and valencebands, band tails, and defect states for amorphous silicon. Dashed lines represent thedensity of states for crystalline silicon. Reproduced from Street [10].

CHAPTER 1. INTRODUCTION 12
(a) (b) (c)
Figure 1.5: Ghost images taken on a Varian 4030CB detector. The detector wasirradiated for several hundred frames and the images correspond to lag frame (a) 2,(b) 50, and (c) 100. Each figure was independently windowed and leveled to highlightthe contrast.
The first lag frame is the first frame of the FP after x-ray exposure has ended. Ghost
images, or high contrast objects that are visible after the x-ray exposure has ended,
are examples of lag images in an x-ray detector. Example ghost images are shown in
Figure 1.5 where a Varian 4030CB a-Si FP detector was irradiated for several hundred
frames and then additional detector (lag) frames were collected after the x-rays were
turned off. Lag frames 2, 50, and 100 are shown and were individually windowed and
leveled to show the contrast and detail that occurs.
It has also been shown that detector lag affects diagnostic CT [16] and CBCT
reconstructions. Detector lag can lead to a range of image artifacts, such as streaking,
azimuthal blurring [14, 17], skin-line artifacts of several hundred HU [18], or shading
artifacts referred to in this dissertation as the radar artifact. Specifically for a pelvic
phantom scan, detector lag has caused radar artifacts measured from 20 - 35 HU
[19, 20].
Spatial averages of flat-field images on the Varian 4030CB can be used to more
carefully examine the temporal response of the detector. Ideally, under constant
irradiation one would expect the detector to maintain a constant output over time.
However, under experimental conditions a 4% exponential rise following an input
step function, known as the rising step-response function (RSRF), is seen in Figure
1.6. Also shown in Figure 1.6 is the spatially averaged detector response to removing

CHAPTER 1. INTRODUCTION 13
Figure 1.6: The normalized measured and ideal responses of the Varian 4030CB a-SiFP to 600 frames of x-ray exposure (125 kVp, 32 mA, 17 ms, 15 fps). A 4% signalincrease is seen in the measured RSRF. After the x-rays are turned off, a FSRF with2.5% first frame lag that slowly decays away is observed. Note the break in the y-axis.
irradiation, or the falling step-response function (FSRF), which shows detector lag
greater than 0.1% for hundreds of frames.
For the RSRF data, some of the charge that would have been collected by the
readout process instead fills empty traps. As traps fill, a higher percentage of gen-
erated charge is collected in later frames, along with an increasing amount of leaked
charge. This evolving process manifests itself as an increased measured signal in suc-
cessive irradiation frames. The increasing output signal (for a constant input) will
continue until the trapping and detrapping rates become equal.
1.5 Simulation of a-Si FP Detectors
Long-term lag of 0.1%, as seen in Figure 1.6, is substantial because it could easily
equal the signal behind a large object. As an example, for 36 cm of water and a mean
x-ray energy of 75 keV, the output radiation from the object is also approximately
0.1% of the incident radiation. For detector elements that transition from the full
x-ray exposure to object shadow, the addition of a 0.1% lag signal to the detector
measurement could decrease the calculated CBCT line integral (i.e., after the natural

CHAPTER 1. INTRODUCTION 14
logarithm has been taken) by up to 9%. As a rough upper bound, points near the
edge of the object could see their reconstructed signal decrease by up to 9% of the
water signal, or 90 HU.
The effect on CBCT reconstructions of the FP response seen in Figure 1.6 can be
simulated. Figure 1.7 shows the reconstruction from simulated projection data (625
projections) of a uniform 42 cm × 26 cm pelvic phantom. Signal levels meant to
mimic realistic exposure levels were used. The reconstruction with no lag is shown
in Figure 1.7(a) and with lag in Figure 1.7(b). The mean signal difference between
the two indicated ROIs is 45 HU. In Figure 1.7(c), the largest differences (brightest
pixels) between the sinograms with and without lag occur at collected points outside
the object. For a third-generation CT acquisition system, time corresponds directly
to gantry projection angle (vertical direction in Figure 1.7(c)). Because of this, the
temporal blurring of detector lag results in a vertical blurring in the sinogram. Those
detector cells that transition from object shadow to full x-ray exposure see the greatest
effect of the vertical blurring and determine spatially where the severe shading artifact
occurs.
Figure 1.8(a) shows the resulting lag artifact from a CBCT reconstruction from
real projection data acquired for a 42 cm × 26 cm pelvic phantom. The image was
reconstructed from 625 projections with a 1 mm2 pixel size and 5 mm slice thickness.
Here the shading artifact is 51 HU in contrast between the two indicated ROIs. The
artifact is less than 90 HU for both the simulated and real data because no detector
elements transitioned from the full exposure to full object shadow. The detector
elements that cause the artifact are located in the sections labeled 1 in the sinogram
in Figure 1.8(b). The radius of the well-defined brighter region in Figure 1.8(a) is
determined by the width of section 2 in Figure 1.8(b). In CBCT, all pixels being
exposed to x-rays will also see a gradual increase in gain, but the pixels in section 1
that see a large and sudden drop in signal have the large detrapping currents that
create the radar artifact.
Figure 1.9 shows a comparison between reconstructions from a diagnostic CT
scanner (Figure 1.9(a)) and a prototype table-top FP system operating at 600 fps
(Figure 1.9(b)). The two liquid filled organs (center and center-left in the images)

CHAPTER 1. INTRODUCTION 15
appear different because of the orientation difference of the phantom for the two
acquisition scans. Here, the radar artifact is measured at 70 HU for the reconstruction
from the FP system and is completely absent in the reconstruction from the diagnostic
CT system. Furthermore, the FP system reconstruction shows that the radar artifact
gets worse at higher frame rates.
Previous work [18, 20] has identified this skin-line or radar artifact for elliptical
and off-center objects, and this is the CBCT artifact that this work is concerned
with. The artifact is not due to the dynamic gain mode of the detector because
the detector pixels switch to the high-gain mode within several millimeters of the
object boundary, which is evident as a faint line just inside the object boundary in
Figure 1.8(a). Shown in Chapter 4, the artifact can be reproduced in fixed gain
modes as well. The artifact does not appear the same as scatter or beam-hardening
artifacts in CBCT reconstructions [21, 22, 23, 24], and has been observed for centered
geometries by Mail [18] and will be shown in Chapters 2, 3, and 4 for a head phantom
with a centered geometry. Furthermore, the x-ray exposure was collimated to 2 cm
at the detector for the real acquired data to minimize any effects from scatter in
Figures 1.8(a) and 1.9(b). Finally, since the artifact appears to be reproduced in the
simulation in Figure 1.7, which did not include scatter, beam-hardening, dynamic
gain switching, offset geometry, or normalization phantoms, detector lag is the most
likely cause.
1.6 Other Detector Technologies
Alternatives to a-Si exist that have a number of advantages. Amorphous selenium
(a-Se) can be used for direct or indirect conversion x-ray detectors, and can be made
to be very high resolution and have very low electronic noise [25, 26]. However,
detectors manufactured from a-Se still have significant levels of detector lag due to
charge trapping similar to that of a-Si [27][28]. Other detector technologies that are
being investigated for their high sensitivity and low-noise properties include detectors
manufactured from mercuric iodide and lead iodide [29, 30]. These materials have
significantly larger amounts of detector lag than a-Si, with reported first frame lags

CHAPTER 1. INTRODUCTION 16
(a) (b)
(c)
Figure 1.7: (a) Reconstruction of a simulated uniform pelvic phantom (42 × 26cm). (b) Reconstruction of the data in (a), with detector lag simulated. The meansignal difference between the two marked ROIs is 45 HU. (c) Difference image of thesinogram with lag minus the sinogram with no lag. A vertical blurring is seen at theedges of the object (indicated with arrows) in the sinogram. Window, level = 200, 0HU.

CHAPTER 1. INTRODUCTION 17
(a) (b)
Figure 1.8: (a) CT reconstruction of a pelvic phantom showing the radar artifactand (b) its corresponding sinogram. Scanned at 125 kVp, 80 mA, 30 ms on a Varian4030CB table-top system. Reconstructed with filtered backprojection with a voxelsize of 1 mm2 × 5 mm. Between the specified ROIs there is a mean difference of51 HU. The darker area of the phantom in (a) corresponds to detector elements thatcome from section 1 in the sinogram. Elements in section 1 see a large dynamic range,including the full x-ray exposure, as opposed to those in section 2 which are alwaysblocked.
(a) (b)
Figure 1.9: Comparison between reconstructions from a (a) standard diagnostic CTscanner and (b) an a-Si flat-panel table-top system running at 600 fps. The liquid-filled organs are empty in (a) and filled in (b) because of the different orientations ofthe phantom during each scan.

CHAPTER 1. INTRODUCTION 18
ranging from 8% to nearly 50%. Thus, detector lag is expected to be a similar or
worse problem with future FP detector technology.
1.7 Outline of Dissertation
This dissertation is organized into chapters as follows:
Chapter 1 provides a brief background into x-ray physics, CT reconstruction,
amorphous silicon flat-panel detectors, and lag artifacts in projection images and
CBCT reconstructions.
Chapter 2 details some specific lag measurements for an amorphous silicon detec-
tor, analyzes different techniques for determining a linear, time-invariant lag correc-
tion, and determines the best linear correction for different CBCT phantoms.
Chapter 3 develops a more sophisticated and novel non-linear, time-variant lag
correction that better corrects the detector output and removes residual artifact re-
maining from the corrections in Chapter 2. Chapter 3 also compares lag correction
algorithms calibrated for small regions of the detector versus a single calibration of
the entire x-ray detector.
Chapter 4 presents the results of using a novel hardware method to remove the
effect of lag on projection images and CBCT reconstructions. Detector performance
measurements are presented and a comparison to the results of Chapter 3 is made.
Chapter 5 summarizes the main contributions of the dissertation and discusses
future research to be performed.
The Appendix includes material that shows why, theoretically, detector lag is
well described by a multi-exponential signal. The Appendix goes on to describe why
previous work on a-Si lag correction has implicit assumptions on the input signal to
the detector.

Chapter 2
Linear Software Lag Corrections
For software lag compensation methods, a suitable model of the lag decay is fit to
the a-Si FP data, such as a multi-exponential [31] signal or power function [13]. An
attractive feature of the multi-exponential model for lag decay is that it is based on
the semiconductor physics, as discussed in Appendix A. Typically, the a-Si FP is
modeled as a linear time invariant (LTI) system, which is described by an impulse
response function (IRF). The correction is a temporal deconvolution of the detector
output with the modeled IRF [32].
There are many ways to measure an IRF of the a-Si FP. Previous authors have
directly measured it by irradiating for a single frame [14]. A response can also be
measured to much longer periods of irradiation, as shown in Figure 1.6. The rising
step-response function (RSRF) looks at the a-Si FP response to the application of
x-rays, while the falling step-response function (FSRF) is the response after a long
irradiation has stopped. For an LTI system, the IRF is directly related to the step
responses through differentiation. Another point to consider is the length of the IRF.
Strategies have been reported where authors limit the IRF to a few frames, tens of
frames, or let it be infinite in length [18, 32, 31]. Our strategy will follow the latter
since it is our experience that the long time constants associated with charge trapping
cause the artifacts that are the focus of this study.
Several hardware approaches exist that make no LTI assumptions for the a-Si FP,
and will be discussed further in Chapter 4. In general though, the hardware methods
19

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 20
may limit the detector frame-rate, will not affect the scintillator temporal response,
and may increase the electronic noise of the system. These possible disadvantages
make a software correction more desirable, although hardware methods also have
their own advantages.
For an x-ray image intensifier system with cesium iodide (CsI) scintillator, the
temporal modulation transfer function (MTF), which is the normalized magnitude
of the Fourier transform of the temporal IRF, has been observed to be dependent
on the exposure level [33, 34]. Furthermore, differences between using the RSRF or
FSRF measurements were observed, and appropriate corrections to DQE measure-
ments made to account for the nonlinearities of detector lag. This chapter will focus
on finding the software LTI method for an a-Si FP that best removes the severe
shading artifacts in CBCT. Specifically, the work will investigate how sensitive the
IRF calibrations are to different measurement techniques. Next, IRFs that span the
range of possibilities from different measurement techniques will be used to correct
the CBCT projection data, and the resulting reconstructions will be evaluated for
shading artifact removal.
The chapter is organized as follows. Section 2.2 gives background on an existing
LTI lag correction. Section 2.3 describes the step-response measurements used to
investigate the FP and derive the IRFs. It also describes the CBCT data sets used
to compare the different corrections. Finally, Section 2.4 presents the results of those
experiments and Section 2.5 discusses the results and differences from previous work.
2.1 Background and Theory
2.1.1 Hsieh LTI Algorithm for Lag Correction
In his work, Hsieh [32] represents the temporal IRF for afterglow as a multi-exponential
signal, where the time constants and coefficients are known a priori for the underlying
continuous process. For operating on frame-integrated data that comes from an a-Si
FP detector, it is useful to have a discrete-time version, since the detector output is
inherently discrete. A discrete-time version can be easily derived, starting from the

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 21
multi-exponential IRF
h(k) = b0δ(k) +N∑n=1
bne−ank, (2.1)
where k is the discrete-time variable for x-ray frames and N is the number of ex-
ponential terms in the IRF, typically between two and four [35, 31, 18]. δ(k) is the
impulse function of magnitude 1.0, and represents the portion of the input signal that
is unaffected by lag. The coefficients bn will be referred to as the lag coefficients and
the exponential rates an will be referred to as the lag rates. Given h(k), the actual
FP output is,
y(k) = x(k) ∗ h(k). (2.2)
The ideal output of the FP with no charge trapping and a lag-free measure of exposure
on the FP is x(k), what we wish to determine. The units of y(k) and x(k) are detector
counts, and the units of h(k) are (detector counts with lag/detector counts without
lag).
The recursive deconvolution algorithm for this IRF model is
x(k) = xk =y(k)−
∑Nn=1 bnSn,ke
−an∑Nn=0 bn
(2.3)
Sn,k+1 = xk + Sn,ke−an . (2.4)
Sn,k is a state variable that contains the contribution from previous inputs. Hsieh’s
recursive algorithm is a computationally efficient way to implement the LTI correc-
tion. Only the current frame and the Sn,k term need to be stored in memory to
perform the deconvolution.
In the denominator of Eq.(2.3), the sum of all bn will be forced to equal 1.0 so that
h(0) equals 1.0. The sum could be scaled to other values, but that will only result in
an overall scaling of the estimated signal x(k).

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 22
2.1.2 Exponential Model Fitting
In this work the IRF will be determined from rising or falling step responses. By
fitting the measured FSRF or RSRF to their parameterized models, the lag rates and
coefficients can be easily obtained. The measured FSRF is related to the parameters
in Eq.(2.1), and can be written for a specific exposure x as
FSRFunnormalized(k) =N∑n=1
xbn
1− e−ane−anku(k), (2.5)
where u(k) is the discrete unit step function. Normalizing the FSRF by the exposure
x gives
FSRF (k) =N∑n=1
bn1− e−an
e−anku(k). (2.6)
The FSRF can be described as a simple multi-exponential by defining b̃n = bn/(1−e−an), which gives
FSRF (k) =N∑n=1
b̃ne−anku(k). (2.7)
Similarly, the measured RSRF (k) is related to Eq.(2.1), where
RSRF (k) = (1−N∑n=1
b̃ne−ank)u(k). (2.8)
For practical purposes the falling step function used as input to determine the
measured FSRF in Eq.(2.7) is approximated as a long square wave of irradiation, as
in Figure 1.6. To properly account for a finite-length step-function in Eq.(2.7), the
response of an exposure of Nf frames in length is
FSRFNf(k) =
N∑n=1
wnb̃ne−anku(k). (2.9)

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 23
Here wn is the summation of the exponential that falls within the exposure length,
normalized by the total summation of the exponential,
wn =e−an − e−anNf
e−an. (2.10)
The Nf subscript will typically be dropped since it refers to all collected FSRF data
in this dissertation.
Fitting the N exponentials in Eqs.(2.8) and (2.9) is a nonlinear problem and a
Gauss-Newton nonlinear least squares method can be used [36].
2.2 Methods and Materials
Step-response measurements were made to investigate the lag characteristics of the
Varian 4030CB a-Si FP and the variation in the derived IRFs. Next, CBCT projection
data was collected and corrected with selected IRFs for lag artifact removal.
2.2.1 Step-Response Measurements
For the step-response measurements, the lengths of the rising and falling step func-
tions were fixed. Traps with time constants ranging from a few milliseconds to several
days exist. Those that have time constants of charge emission and uptake that are
shorter than the time to acquire a single frame do not contribute significantly to the
long-term lag responsible for the radar artifact. Conversely, traps that have time
constants much longer than the typical scan time of the system under consideration
can be corrected for by collecting frequent dark-field images and occasional gain cal-
ibrations. Moreover, the very long-term traps can be filled by warming up the panel
with several flat-field images before use. The time constants of concern for our inves-
tigations are those between the duration of a single frame and the entire scan length.
Our step-response measurements therefore consist of 600 RSRF frames followed by
600 FSRF frames, unless otherwise noted, since our CT acquisitions are on the order
of 600 frames.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 24
The step-response measurements at different exposures, RSRF and FSRFNfin
Eqs.(2.8) and (2.9), allow investigation into several aspects of detector lag, such as
the necessary model order for lag characterization, charge trapping linearity, and
frame-rate dependence. The step responses also allow investigation into the spatial,
exposure, step-response edge (rising versus falling), and exposure length dependence
of the IRF measurements and corrections. Similar to Yang [31] and Mail [18], a single
large ROI is spatially averaged (except where noted) in each step-response data set
to characterize and to investigate the detector temporal response.
For IRFs and step responses, the residual first frame lag is often used as an error
metric [14]. While the first frame lag depends on all of the exponential terms, the
artifact observed in the CBCT reconstructions is dependent on longer time constants
(i.e., greater than 10 frames). While acquisition times for diagnostic CT scans are
much shorter, lag with relatively longer time constants has been observed to cause
more artifact [16]. The artifact is a blurring of previous, fully-illuminated frames
outside the object into frames with object shadow. Since the artifact is evident quite
far from the edge in Figure 1.8(a) and the effects from shorter time constants would
have decayed away close to the object boundary, the lag with longer time constants
must determine the artifact severity. As a measure of the longer time constant lag,
the 50th frame lag (t = 3.33s at 15 fps) is measured, and is also representative of
even longer time constant lag because the residual lag curves compared in this work
do not cross each other.
Data for lag investigation was collected on a table-top system using a Varian
4030CB a-Si detector operating in dynamic gain mode. The detector operated at 15
frames per second (fps), unless otherwise noted. The RSRF and FSRF data that was
used to determine the IRF parameters was collected in a centered geometry, with no
bow-tie filter, and no object in the x-ray beam.
The RSRF measurements were normalized by the output of a separate silicon
photodiode attached to a ceramic GOS scintillator (Hamamatsu S8193) to form a
normalization chamber. The silicon photodiode has no lag and the ceramic scintillator
is extremely fast. Using the output of the normalization chamber, any variation in
the measured RSRF due to the x-ray tube or generator can be removed. The output

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 25
of the photodiode was amplified and digitized using a National Instruments A/D
converter (USB-6008).
Multi-exponential model order
From a performance standpoint, it is beneficial to use as few exponentials as possible,
but enough exponentials to still capture the temporal behavior of the FP. The length
of time needed to perform the correction is linearly proportional to the number of
exponentials. Furthermore, more exponentials could lead to over-fitting of calibration
data and actually lead to worse or more noise-sensitive results. To evaluate the
optimal number of exponentials to use for the Varian 4030CB a-Si FP, the squared
residual error between the measured step-response data and an N -exponential model
fit to the step-response data was used to evaluate the fit quality. N was varied from
two to ten, and step-response data at different exposures was used.
Exposure dependence
To investigate the exposure linearity of the charge trapping mechanism in the Varian
4030CB FP, the RSRF and FSRF were measured for ten different incident exposure
levels. The data was also normalized by the signal level in detector counts during
exposure. The a-Si FP output signals as a percentage of the FP saturation level for
the range of incident exposures used, along with the x-ray tube protocols, are listed
in 2.1. Additional Cu filters were used to achieve the lowest exposure levels.
By fitting the FSRF to a multi-exponential discrete model, bn and an are found
for each incident exposure. Summing from the first lag frame to infinity, an estimate
of the total amount of stored charge in the a-Si FP at each exposure level x can be
formed as,
Q(x) =∞∑k=1
N∑n=1
xbn
1− e−ane−ank =
N∑n=1
xbne−an
(1− e−an)2. (2.11)

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 26
Exposure Level 1* 2** 3 4 5 6 7 8 9 10mA 10 10 10 10 10 16 25 32 40 50ms 2 2 2 8 15 16 16 17 18 18
% a-Si FP Saturation 0.5 1.6 3.4 8.5 15 25 38 52 68 84
Table 2.1: Percent of a-Si FP saturation signal for different exposure intensities at125kVp. *Used 1.75 mm Cu. **Used 0.5 mm Cu.
Frame rate dependence
Step-response measurements were investigated at four frame rates (5, 10, 15, and 30
fps) by irradiating the Varian 4030CB in continuous fluoroscopy mode for 30 seconds
at each frame rate. The protocol used was 70 kVp and 5 mA, and was chosen so
that a signal level of 12% saturation exposure was present at 30 fps and 72% at 5
fps. Continuous fluoroscopy was chosen so that the same exposure was identically
delivered for each frame-rate experiment, which should result in identical amounts of
charge stored in the traps. Note, the photodiode integration times change with frame
rate, resulting in different FP signal levels during irradiation. The resulting RSRF
data was plotted against frame number and time, and normalized appropriately so
that the ending points of all plotted frame-rate data are 1.0. The resulting FSRF
data was plotted in three different ways. First, the raw FSRF data was scaled by
the incident exposure at 5 fps for all frame rates to visualize how lag absolutely
changes and plotted versus frame number. Second, the same data was plotted versus
time. Finally, the unscaled FSRFs were multiplied by the frame rate, f , to determine
itrap(t), the charge generated by the FP per unit time as
itrap(t) = FSRF (t)× f. (2.12)
IRF variability
IRFs were derived and compared from several different step-response techniques.
First, the edge-technique dependence was investigated by using both the RSRF and
FSRF to estimate the temporal IRF at a fixed exposure of 52% a-Si FP saturation,
and the resulting IRFs compared after applying the Hsieh correction. Second, IRFs

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 27
were also derived from RSRF and FSRF data at different exposures (Table 2.1). Each
of the IRFs were used to correct different exposure step response data sets, and the
results compared to correcting data with IRFs derived from the same exposure level.
Third, an IRF was derived for a small, central ROI (32 × 32 pixels) and then applied
to the entire FP for a 38% FP saturation exposure to investigate the spatial non-
uniformity of the IRF. Independent of the ROI size used to determine the IRF on the
a-Si FP, Eqs.(2.3)-(2.4) are calculated at the individual pixel level. For analysis the
result of the correction was also broken into small ROIs of the same size to determine
the spatial effectiveness of the correction.
Finally, to test the effect of step response irradiation length (Nf ) on the measured
IRF, FSRF data generated from an x-ray exposure of one quarter (150 frames) the
calibration length was acquired. The shortened FSRF150 data was corrected with an
IRF derived from a full-length calibration at the same exposure intensity.
2.2.2 CBCT Measurements
CBCT data sets were acquired for two different phantoms: a large pelvic phantom
(42 cm × 26 cm) and a uniform acrylic head phantom (20 cm × 16 cm). The large
pelvic phantom is made up of a smaller pelvic phantom with an additional layer
of attenuating material to simulate larger patients. A total of 625 projections were
collected in a 2×2 binned pixel mode. The tube protocols were chosen to give high
SNR. For the large pelvic phantom, a pulsed fluoroscopy protocol of 125 kVp, 80 mA,
and 30 ms was used in an offset detector geometry (16 cm offset). For the uniform
acrylic head phantom, a tube protocol of 125 kVp, 63 mA, and 18 ms was used. For
all setups, a 10:1 anti-scatter grid, an appropriately designed (i.e., centered or offset
geometry) 8:1 Al bowtie filter, and 0.5 mm Ti filter were also used. The x-ray beam
was collimated to approximately 2 cm at the detector for data acquisition to reduce
scatter effects. To further reduce the effects of beam hardening and scatter, all data
sets made use of circular normalization phantoms that were just larger than either
the pelvic or head phantom [37]. The FDK algorithm [6] was used to reconstruct the
data sets at a reconstruction pixel size of 1 mm2 for the pelvic phantom and 0.5 mm2

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 28
for the head phantom. The slices were averaged to a thickness of 5.0 mm to reduce
noise.
The lag rates and coefficients estimated from both FSRF and RSRF data at ten
different incident exposures (Table 2.1) were used to correct the CBCT projection
data. The variability in the residual lag artifact due to the IRF calibration method
in the CT reconstructions was evaluated.
The error metric used in Mail [18] was a non-uniformity measure that examined
the maximum difference in HU signal level among several ROIs. We define our error
metric in a similar way. Four pairs of ROIs (10 × 10 pixels) that straddle the obvious
lag artifact boundary in the uncorrected data sets are defined. The difference in the
mean signals is calculated for each ROI pair and the average and maximum differences
for each image are used as the error metrics. Thus, other factors potentially affecting
image non-uniformity are minimized since local regions are being compared.
2.3 Results
2.3.1 Step-Response Measurements
Multi-exponential model order
The residual error between the multi-exponential fit and the step-response data is
shown in Figure 2.1 for two different x-ray tube settings (3.4% and 84% of FP satu-
ration). The residual errors have been normalized such that for N = 2 the residual
error is exactly one. It can be seen that the residual curves have a knee when the
number of exponentials used is around three or four. This is the point where the
reduction in error is quite small as N increases. For some points, the residual error
increases for a larger N due to a failure of the nonlinear algorithm to properly find
the global minimum. Large values of N may also result in problems with over-fitting.
The low-exposure RSRF residual is larger than the other residuals because the noise
associated with the x-ray source at low exposure makes up most of the fitting error.
In general, N = 4 is an adequate choice for describing the RSRF, FSRF, and resulting
IRFs, so four exponential terms will be used throughout this dissertation.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 29
Figure 2.1: Residual error in fitting multi-exponential model of order N to measuredstep-response data for two different exposure intensities. Low exposure equals 3.4%and high exposure equals 84% of a-Si FP saturation.
Exposure dependence
The rising and falling step responses for the nine highest exposure intensities are
plotted in Figure 2.2(a). The raw FSRFs show an increase in the absolute amount of
lag as the exposure on the FP increases. However, when the FSRFs are normalized by
their respective exposures, as in Figure 2.2(b), the FSRF signals decrease as a function
of exposure. In fact, the FSRF decreases by more than a factor of two between the
lowest and highest exposure intensities at 50 seconds. A similar exposure dependence
is observed for the normalized RSRF data where the responses approach a value of
one for larger exposure rates. For a linear system the normalized plots should be
identical. The RSRF part of the plots were filtered with a five-point moving average
for noise reduction purposes. Furthermore, the lowest exposure intensity of 0.5% is
not shown because the data was much noisier due to the lower signal level.
The results of investigating Q(x) as a function of exposure are shown in Figure
2.3. The stored charge as a function of incident exposure deviates from a linear
function, where Q(x) has a large slope for smaller exposures and the slope decreases
for larger exposures. For reference, a linear function is fit to the lowest five exposures
and extrapolated across all exposures.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 30
(a) (b)
Figure 2.2: (a) Raw (detector counts) and (b) normalized rising and falling stepresponses for several different exposure intensities. In (a) the measured lag increasesas the exposure intensity increases. In (b) the measured data was normalized bythe exposure intensity immediately before x-ray turn-off. As the exposure intensityincreases, the relative amount of measured lag decreases.
Figure 2.3: The number of estimated traps in the Varian 4030CB a-Si FP measured indetector counts. For comparison, an extrapolated linear fit to the first five exposuresis shown.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 31
Frame rate dependence
When plotted against frame number, the RSRF data from higher frame rates shows
a larger deviation from the ideal (flat) temporal response (Figure 2.4(a)). When the
same data is plotted against time (Figure 2.4(b)), the RSRF data for each frame rate
overlays each other almost perfectly. This suggests that the RSRF results from a
continuous process inside the detector, and is not dependent on the number of frame
reads. Similarly, in Figure 2.5(a) the raw FSRF data for each of the four frame rates
has been identically scaled and plotted versus frame number. The higher frame rates
have shorter integration times, which lead to smaller initial lag signals when viewed
versus frame number. However, between frames 200 and 400, the lag signals from the
different frame rates change their ordering such that the higher frame rates have a
larger lag signal. When the same data is plotted versus time (Figure 2.5(b)), the effect
of the longer integration times for smaller frame rates is seen as a higher lag signal
for smaller frame rates. The larger frame-rate data has more photodiode reads per
second, which can be accounted for by plotting itrap(t) instead (Figure 2.5(c)). The
trap current is identical for each of the different rates, indicating that the charge that
leaks out of the traps is independent of the number of reads and is only dependent on
time. The plots in Figure 2.5(a) are the frame integrated versions of those in Figure
2.5(c).
IRF variability
Figure 2.6 shows the result of correcting step-response data at 38% FP saturation
exposure using either the RSRF (Figure 2.6(a)) or the FSRF (Figure 2.6(b)) data
from a central ROI. The responses of the central ROI, the average of all ROIs on the
FP, and the ROI that is maximally deviant from the average ROI are shown for both
both uncorrected and corrected step-responses. The RSRF shows very little spatial
variation, while considerably more is seen for the FSRF. For the average of all ROIs,
the 1st and 50th frame lags are reduced from 4.0% and 0.62% to 0.66% and 0.1%.
For the maxmimally deviant ROI, the 1st and 50th frame lags are reduced from 5.2%
and 0.94% to 1.9% and 0.42%. At frame 50 (t = 3.33 seconds), the maximum residual

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 32
(a) (b)
Figure 2.4: The normalized RSRF data for each frame rate (5, 10, and 30 fps) plottedas a function of (a) frame number and (b) time. When plotted versus frame number,the RSRF decreases with increasing frame rate, and when plotted versus time, thefour data sets overlay each other.
lag is 4× greater than the average residual lag.
An IRF was calibrated from 3.4% RSRF data and used to correct both 3.4%
and 84% RSRFs (Figure 2.7(a)). The correction results in a nearly ideal (flat) 3.4%
RSRF after correction, but an overcorrection of the 84% RSRF data. Similarly, the
experiment was repeated for an IRF derived from the 3.4% FSRF data (Figure 2.7(b)),
and applied to both the small and large exposure data sets. For the corrected 3.4%
FSRF data, the 1st and 50th frame lags are reduced from 3.6% and 1.0% to 0.12%
and 0.038%. Just as for the 84% RSRF data, the corrected 84% FSRF data shows
an overcorrection where the 1st and 50th frame lags are overcorrected from 2.3% and
0.42% to -1.1% and -0.54%. Using an IRF calibrated from a small exposure on larger
exposure data highlights the exposure dependence of the FP.
Figure 2.8 compares the results of using either the RSRF or FSRF for calibration
of the IRF. One uncorrected and two corrected calibration data sets are shown from
an exposure level of 52% of FP saturation. The 1st and 50th frame lags for the
uncorrected data are 2.9% and 0.49%. The correction done with the RSRF calibrated
IRF shows a very flat corrected RSRF, but an overcorrected FSRF where the 1st and

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 33
(a) (b)
(c)
Figure 2.5: (a) The raw FSRF data for each frame rate, scaled by the incidentexposure at 5 fps and plotted versus frame number. (b) The same data in (a) plottedversus time. (c) itrap(t) for the four frame rates. The charge per unit of time isconstant across frame rates, indicating that the detrapping process is a continuousfunction of time.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 34
(a) (b)
Figure 2.6: The uncorrected and corrected (a) RSRFs and (b) FSRFs for 32× 32 pixelROIs on the FP. The IRFs used for correction were derived from the (a) RSRF and(b) FSRF data of the central ROI. The corrected central ROI, the average correctedROI, and the corrected ROI that is maximally deviant from the average are shown.For the average of all ROIs, the 1st and 50th frame lags are reduced from 4.0% and0.62% to 0.66% and 0.1%. For the maxmimally deviant ROI, the 1st and 50th framelags are reduced from 5.2% and 0.94% to 1.9% and 0.42%. At frame 50 (t = 3.33seconds), the maximum residual lag is 4× greater than the average residual lag.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 35
(a) (b)
Figure 2.7: Measured and corrected (a) RSRF and (b) FSRF data at a low and highexposures (3.4% and 84% of a-Si FP saturation). The IRFs used for data correctionwere calibrated from (a) 3.4% RSRF and (b) 3.4% FSRF data. The corrected 84%RSRF data is overcorrected, while the corrected 3.4% RSRF data is nearly flat. Forthe corrected 3.4% FSRF, 1st frame and 50th frame lag is reduced from 3.6% and1.0% to 0.12% and 0.038%. For the corrected 84% FSRF, 1st and 50th frame lag isovercorrected from 2.3% and 0.42% to -1.1% and -0.54% respectively.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 36
Figure 2.8: One uncorrected and two corrected step response data sets are shown.1st and 50th frame lags for the uncorrected data are 2.9% and 0.49%. The correctiondone with the RSRF calibrated IRF shows a very flat corrected RSRF, but a signifi-cantly overcorrected FSRF. The 1st and 50th frame lags become -0.54% and -0.25%.Conversely, the FSRF based correction has a residual exponential rise in the correctedRSRF, but a nearly ideal corrected FSRF. 1st and 50th frame lags are reduced to0.24% and 0.017%.
50th frame residual lags become -0.54% and -0.25%. Conversely, the correction done
with the FSRF calibrated IRF has a residual exponential rise to its corrected RSRF,
but a nearly ideal corrected FSRF. The 1st and 50th frame lags are greatly reduced
to 0.24% and 0.017%.
In Figure 2.9, FSRF data generated from exposures of 10 seconds (150 frames)
and 40 seconds (600 frames) at 25% of a-Si FP saturation are shown. The IRF was
calibrated with FSRF600 and used to correct the same FSRF data, where a reduction
in the 1st and 50th frame lags of 2.8% and 0.61% to 0.44% and 0.023% was observed.
However, when the same IRF was used to correct FSRF150 an under-correction is seen.
The 1st and 50th frame lags are only reduced from 2.6% and 0.45% to 0.52% and
0.082%. The IRF derived from the FSRF600 data underestimates how much charge
has gone into the traps.
In summary, varying the incident exposure and the step-response edge (rising
versus falling) resulted in larger 50th frame residual lag errors greater or equal to
0.25% of the incident exposure in some cases. Furthermore, using an IRF from a

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 37
Figure 2.9: Measured and corrected FSRF data for 10s and 40s of x-ray exposure at25% of a-Si FP saturation. IRF was calibrated with the measured 40s FSRF data.For the corrected 40s FSRF, 1st and 50th frame lags are reduced from 2.8% and0.61% to 0.44% and 0.023%. For the corrected 10s FSRF, 1st and 50th frame lagsare reduced from 2.6% and 0.45% to 0.52% and 0.082%.
small ROI resulted in an average 50th frame residual lag less than 0.25%, but a
maximum residual lag greater than that. Taking step-response data from different
exposure lengths resulted in smaller errors of less than 0.1%.
2.3.2 CBCT Measurements
Figure 2.10 shows reconstructions of a large human pelvic phantom taken on the Var-
ian 4030CB table-top system. Figure 2.10(a) shows the uncorrected reconstruction
with four pairs of ROIs defined. The maximum and average errors for this reconstruc-
tion are 51 and 35 HU. Figure 2.10(b) shows the reconstructions with the smallest
maximum (8 HU) and average (3 HU) ROI errors, which corresponds to correction
with FSRF data taken at an exposure of 3.4% of saturation. Figure 2.10(c) shows the
reconstruction with the largest maximum error (40 HU) which corresponds to correc-
tion with RSRF data taken at a 68% saturation exposure. Even with an average error
of 3 HU in Figure 2.10(b), a slight blurred ring artifact remains. Figure 2.11(a) and
(b) summarize the maximum and average error results for all incident exposures for
FSRF and RSRF calibrations. Table 2.2 gives the IRF parameters used to generate

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 38
a1 a2 a3 a4 b1 b2 b3 b4
0.0023 0.0150 0.0827 0.5786 1.611e-5 1.468e-4 9.190e-4 1.480e-2
Table 2.2: IRF parameters from FSRF data at 3.4% exposure. an has units offrames−1 and bn has units of (detector counts with lag/detector counts withoutlag).
Figure 2.10(b) as an example.
Figure 2.10(d)-(f) and Figure 2.11(c)-(d) show similar results for the uniform
acrylic head phantom. The maximum and average errors for the uncorrected head
phantom reconstruction are 24 and 19 HU. An IRF calibrated with the FSRF tech-
nique at a 1.6% saturation exposure provides the smallest average error of 2 HU and
a maximum error of 5 HU. The largest maximum error (15 HU) occurs for the FSRF
technique at 84%.
The difference image in Figure 2.12(a) for the pelvic phantom between the recon-
struction using the best LTI correction (Figure 2.10(b)) and the uncorrected recon-
struction (Figure 2.10(a)) shows where the lag correction has altered the reconstruc-
tion. In the central part of the reconstruction, the difference is only a few HU except
for the inside of the pelvic bone. Some subtle streaking is also evident in the difference
image, which is due to quantization error when rounding the lag-corrected x-ray data
to integer data types for the reconstruction pipeline. The largest differences occur
at the boundary and outside the boundary of the circular interior of the phantom.
Looking at the difference between the uncorrected and corrected x-ray detector sino-
grams in Figure 2.12(b), it is observed that the lag correction mainly altered detector
elements outside the object’s boundary and detector elements that transition between
full exposure and object shadow by up to several hundred detector counts. Detector
elements inside the object boundary are only altered by a few detector counts. For
the sinogram, time and projection angle increase in the downward direction.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 39
(a) (b) (c)
(d) (e) (f)
Figure 2.10: (a) The uncorrected reconstruction of the pelvic phantom with the ROIpairs denoted. (b) Reconstruction with the smallest average error which correspondsto using an IRF derived from a FSRF at 3.4%. (c) Reconstruction with the largestmaximum error which corresponds to IRF derived from an RSRF at 1.6%. (d) Un-corrected reconstruction of a uniform acrylic head phantom. (e) Reconstruction withsmallest average error (FSRF at 1.6%) and (f) Reconstruction with largest error(FSRF at 84%). Window = 200 HU for pelvic and 100 HU for head. Center = 50HU.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 40
(a) (b)
(c) (d)
Figure 2.11: The maximum and average absolute errors between ROIs within a pairfor the pelvic and head phantoms. The CBCT projection data was corrected withIRFs derived from different exposure intensities using either the FSRF data in (a)and (c) or the RSRF data in (b) and (d). For the RSRF data, the 0.5% exposure didnot give a suitable fit for the multi-exponential model.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 41
(a) (b)
Figure 2.12: Difference images between the uncorrected pelvic phantom and the bestLTI corrected data sets of (a) the CBCT reconstructions and (b) the raw x-ray de-tector sinograms. (b) looks different that the simulation in Figure 2 because of theoffset geometry acquisition. For the sinogram, projection angle and time increase inthe downward direction. Window, level for (a) is 100, 0 HU and for (b) is 350, 200detector counts.
2.4 Discussion and Conclusions
Large exposure nonlinearity of charge trapping was observed in the Varian 4030CB.
Overall, we found that the exposure level and step-response edge technique (rising vs
falling) caused the greatest variation in the derived IRFs that led to residual 50th lag
frame errors greater or equal to 0.25% in magnitude. When the IRFs were applied
to CBCT projection data, the FSRF technique gave the best results at an exposure
level of 3.4% for the pelvic phantom and 1.6% for the head phantom.
When the profile of the pelvic phantom in the x-ray projections is examined, the
image intensity quickly transitions from the full exposure to several tenths of a per-
cent. The 3.4% signal intensity occurs somewhere in the middle of the transition,
and may act as an average exposure value near the part of the detector that expe-
riences the greatest dynamic range and artifact level. A correction calibrated at an
even lower exposure provided the best correction of the smaller head phantom, but a
similar argument may hold.

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 42
The FSRF technique may provide better results than the RSRF technique because
the artifact investigated is inherently related to the FSRF. The artifact is generated
in detector elements that transition from a high exposure to a low exposure, much
like the FSRF measurements themselves.
One interesting outcome of this work is the comparison between the 32 × 32 pixel
ROI-based calibration and the global calibration method. The spatial uniformity tests
showed that some parts of the FP have much larger amounts of detector lag. Spatial
variation and its effect on CBCT reconstructions will be further explored in Chapter
3. One reason for the slight variation in the IRFs for different spatial ROIs might
be the x-ray beam non-uniformity and its effect on the gain calibration of the panel.
Even if every detector pixel had the same amount of lag, the gain calibration causes
pixel values at the edge of the detector, where x-ray intensity from the tube falls
off, to be adjusted higher. To better understand the spatial variation of lag, future
measurements could be made prior to the gain correction, which would remove the
effect of the x-ray tube non-uniformity, as suggested by Wischmann [38]. Because the
subsequent measurements were done on spatially averaged data, the lag dependence
on exposure and step response edge technique will not change.
Siewerdsen [14] showed that lag as a percent of the incident signal increased for
larger exposures. This is in direct contrast to what we have observed, that lag as a
percent of the irradiating signal decreases with larger exposures. Furthermore, the
same work describes that lag is mostly a function of frame number, and only has a
small dependence on time for first frame lag. Our results show that the lag is well
described by a continuous-time function that can be frame-integrated to determine lag
at different frame rates for the Varian 4030CB FP. These differences could arise from
several sources. First, the previous work measured the IRF directly, instead of either
a RSRF or FSRF. Second, the detector hardware is different (panel manufacturer and
scintillator type) and is operated at different frame rates. Wieczorek [11] and Street
[10] mention that lag is highly dependent on many manufacturing parameters that
could have been quite different for the two a-Si panels.
Previous work used the RSRF to calibrate their LTI models of lag [18, 32]. In our
results, some RSRF techniques performed nearly as well as the best FSRF techniques,

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 43
but from different exposure levels. In general, RSRF measurements were harder to
make and required the use of a separate silicon photodiode to remove noise from the x-
ray source and generator. Overall though, both edge techniques exhibited an exposure
dependence, which show an exposure nonlinearity for charge trapping. Theoretically
the charge trapping in a-Si and the resultant lag signal should be illumination depen-
dent, which is further explained in Appendix A. This nonlinear behavior highlights
why different techniques for measuring the step response give different results, and
it further highlights the limitations of using LTI model-based corrections. This may
also explain the residual blurred ring artifact seen in Figure 2.10(b). Siewerdsen [14]
notes that a lag correction algorithm should take into account the exposure nonlin-
earity of detector lag, which current techniques have not tried to do for FPs. This
work shows that a nonlinear algorithm may be necessary to remove the residual radar
artifact left after lag correction. Furthermore, this work identified the best results
achievable with an LTI correction for removing the radar artifact, which is important
to know when evaluating potential nonlinear solutions. A nonlinear correction that
takes into account the time variance (step-response edge dependence) of the charge
trapping mechanism might remove residual artifact, eliminate the ambiguity of find-
ing the best calibration procedure, and make the optimal lag correction independent
of object size. This will be further addressed in Chapter 3.
Our results match those from investigations with an x-ray image intensifier system
where the amount of lag was larger for RSRF based measurements than for FSRF
experiments [33]. In our case, RSRF-based IRFs often gave an overcorrection of the
projection data as compared to the FSRF experiments. Furthermore, it was found
that the FSRF matched most closely to small-signal approaches, and thus provided
the best description for use in detective quantum efficiency (DQE) measurements
[34]. This is similar to our finding that the best overall artifact correction also used
an FSRF technique. Since our work focused on a-Si FP detectors and not image inten-
sifiers, it may be coincidence that some of the effects agree, although both systems
use a CsI scintillator. While previous authors found that the scintillator response
played a very small role in the overall temporal response of the a-Si detector [19, 14],
it is still possible that the scintillator affects the RSRF data. CsI is known to have

CHAPTER 2. LINEAR SOFTWARE LAG CORRECTIONS 44
a gain hysteresis [39], which may add to the nonlinearity and time variance of the
overall system. Note, the hardware approaches for correcting lag in the a-Si (e.g., the
method presented in Chapter 4) will never correct for scintillator response.
Yang [31] used an LTI model of lag for their simulations, which they justified after
taking measurements at different exposures. However, some nonlinearity is evident in
their measurements. Plus, their investigation of lag was over a much smaller dynamic
range than ours. They irradiated the panel from 16 to 55% of saturation, as opposed
to 0.5 to 84% in our case. The larger exposure range that we covered reflects the fact
that we were also acquiring CT data sets of objects much larger than the breast. For
large objects, the actual signal incident on the detector can be much less than 16%
of saturation.
In summary, it was found that an IRF derived from FSRF data at low exposures
best corrected for the radar artifact in CBCT reconstructions of pelvic and head
phantoms.

Chapter 3
Non-LTI Lag Corrections
3.1 Introduction
Problems with temporal IRF deconvolution were identified in the previous chapter.
First, there are many ways to measure an IRF of the a-Si FP, such as directly from the
response to a single frame of radiation [14], or to a much longer period of irradiation
such as a step-response. The rising step-response function (RSRF) looks at the a-
Si FP response to the application of x-rays, while the falling step-response function
(FSRF) is the response after a long irradiation has stopped. Our work focuses solely
on the step-response techniques because we are most interested in characterizing the
long time constant charge traps which are responsible for the radar artifact. However,
large differences between the responses determined from the RSRF and FSRF were
shown in the previous chapter. Furthermore, it was shown that the IRF is dependent
on the exposure level of the step-response used. Taken together, there is ambiguity
on what is the best technique a priori to use for lag correction using an LTI model,
and furthermore, the charge trapping mechanism is not adequately described by an
LTI model since residual image artifact in the CBCT reconstructions can remain.
Previous work on lag correction algorithms defined a single IRF to characterize
the entire FP detector [18, 31, 40]. However, some spatial non-uniformity for a-Si
FPs has been observed [14, 40]. The FP lag could also be modeled at an individual
pixel or small region of interest (ROI) level to capture spatial variation.
45

CHAPTER 3. NON-LTI LAG CORRECTIONS 46
This chapter explores two important aspects of software lag correction algorithms.
First, the effectiveness of a novel nonlinear time-variant (non-LTI) algorithm is in-
vestigated and compared to standard LTI algorithms. Second, the effect of spatial
non-uniformity in detector lag is investigated and a comparison made between lag
correction algorithms calibrated for small individual ROIs (ROI based) versus the
entire imaging area of the detector (global).
The chapter is organized as follows. Section 3.2 describes the non-LTI algorithm
that has been developed, and how to calibrate the parameters for the algorithm.
Next, step-response and CBCT experiments are described that are used to compare
LTI versus non-LTI algorithms in both ROI and global calibrated versions. Section
3.3 presents the results of the non-LTI calibration, the step-response experiments, and
the CBCT experiments. Finally, Section 3.4 summarizes and discusses the findings
of this chapter.
3.2 Methods and Materials
In this section, the LTI lag correction from Chapter 2 is revisited and then extended
to a novel, non-LTI correction that takes into account the non-linearity and time
variance of the charge trapping mechanism. Step-response and CBCT experiments
are then described to compare the algorithms and to compare ROI-based versus global
calibrations. All experiments were carried out on a table-top x-ray system using a
Varian 4030CB detector running at 15 fps.
3.2.1 LTI Lag Theory
In Chapter 2, an LTI algorithm from Hsieh [32] was used to perform the IRF based
lag corrections. Here, the IRF and recursive lag correction are repeated, since they
are used again in this chapter.
h(k) = b0δ(k) +N∑n=1
bne−ank, (3.1)

CHAPTER 3. NON-LTI LAG CORRECTIONS 47
where k is the discrete-time variable for x-ray frames and N is the number of exponen-
tial terms in the IRF. δ(k) is the impulse function of magnitude 1.0, and represents
the portion of the input signal that is unaffected by lag. The coefficients bn are re-
ferred to as the lag coefficients and the exponential rates an will be referred to as the
lag rates. The sum of all bn will be forced to equal 1.0 so that h(0) equals 1.0. The
sum could be scaled to other values, but that will only result in an overall scaling of
the corrected output.
The ideal output of the FP with no charge trapping is x, and it is also a direct
measure of the incident exposure on the FP. The recursive deconvolution algorithm
to solve for x is
x(k) = xk =y(k)−
∑Nn=1 bnSn,ke
−an∑Nn=0 bn
(3.2)
Sn,k+1 = xk + Sn,ke−an . (3.3)
Sn,k is the state variable for the n-th exponential term that contains the contribution
from previous inputs, where each input is recursively weighted by e−an . The state
variable transmits the weighted history of the FP from one frame of the deconvolution
algorithm to the next, and is graphically shown in Figure 3.1(a).
Estimated stored charge
When the deconvolution algorithm is applied, an estimate of the charge stored in the
FP detector, qk, can be calculated for every frame. This calculation is an essential
part of the non-LTI algorithm, but is also applicable to the LTI algorithm. The
estimate qk is equivalent to the summation of all future corrections the deconvolution
algorithm would apply if all future inputs equal 0 (i.e., x(i) = 0 for all i > k). If
all future x(i) = 0, the algorithm should exactly remove the lag signal and return
0. Thus qk is also the summation of all future lag signals, which is an estimate of
the current charge stored in the FP. Future lag signals can be calculated from the
LTI model and state variable by fixing xk = 0 in Eqs.(3.2)-(3.3) and calculating the
predicted y(k). From Eq.(3.2) and defining Lj as the lag in the jth frame beyond the

CHAPTER 3. NON-LTI LAG CORRECTIONS 48
current frame k,
y(k + 1) = L1 =N∑n=1
bne−anSn,k+1. (3.4)
In the next frame, again with no input,
y(k + 2) = L2 =N∑n=1
bne−anSn,k+2, (3.5)
where, from Eq.(3.3) and with no input (xk+1 = 0),
Sn,k+2 = Sn,k+1e−an . (3.6)
The sum of all residual signals in the predicted lag frames is qk+1:
qk+1 =∞∑j=1
y(k + j) =∞∑j=1
Lj =∞∑j=1
N∑n=1
bnSn,k+1(e−an)j
=N∑n=1
bne−anSn,k+1
∞∑m=0
(e−an)m
=N∑n=1
Sn,k+1
(bne−an
1− e−an
). (3.7)
Note, the subscript for q is k + 1 and the notation is meant to mimic that for Sn,k in
Eq.(3.3). The stored charge immediately preceding irradiation in frame k is qk, and
qk+1 is the stored charge immediately after the irradiation of the kth frame.
We also define qn,k as the estimated stored charge in the FP associated with the
nth exponential term in Eq.(3.7)
qn,k = Sn,kbne−an
1− e−an, (3.8)

CHAPTER 3. NON-LTI LAG CORRECTIONS 49
where
qk =N∑n=1
qn,k. (3.9)
3.2.2 Non-LTI Lag Theory
The basic idea of the non-LTI algorithm is that different exposure-dependent IRFs
are used to deconvolve the detector output to account for the nonlinearity and time
variance properties of the a-Si FP [40]. The current estimate of signal without lag,
xk, will be used as the measure of the exposure level. The function that characterizes
the change in h(k) as a function of xk will be referred to as the impulse response
generator function:
h(k, xk) = b0δ(k) +N∑n=1
bn(xk)e−an(xk)k. (3.10)
For fixed values of xk, h(k, xk) is a multi-exponential IRF like Eq.(3.1). When the
exposure intensity on the FP changes, the lag rates and lag coefficients can change,
creating a new IRF. This is in accordance with the model of charge trapping in a-Si
by Wieczorek [11], where the trap dynamics and the trap occupation function change
as a function of illumination intensity on the photodiode.
An important requirement enforced by the non-LTI algorithm is that the estimate
of stored charge associated with the nth exponential term, qn,k, should not change
when h(k, xk) changes to a new function. In other words, the already stored charge
does not change with exposure intensity; only the dynamics of charge filling and
emptying change.
According to Eq.(3.8), if the lag rates (an) and lag coefficients (bn) change with
exposure on a frame-by-frame basis, qn,k would also change if Sn,k remains constant.
This violates the conservation of stored charge requirement between different models,
but can be fixed by propagating qn,k as the state variable between frames. Prior
to the deconvolution step in Eq.(3.2), S∗n,k will be calculated from qn,k, an(xk), and
bn(xk). The updated state variable, S∗n,k, is consistent with the stored charge after

CHAPTER 3. NON-LTI LAG CORRECTIONS 50
the previous frames, qn,k, and the IRF of the current frame, h(k, xk).
The deconvolution algorithm in Eqs.(3.2)-(3.3) becomes
S∗n,k = F1(qn,k, h(k, xk)) (3.11)
xk =y(k)−
∑Nn=1 bn(xk)S
∗n,ke
−an(xk)∑Nn=1 bn(xk)
(3.12)
Sn,k+1 = xk + S∗n,ke−an(xk) (3.13)
qn,k+1 = F2(Sn,k+1, h(k, xk)) (3.14)
The F1 and F2 functions are inverses of each other, and are explicitly given in the next
section. For a true LTI system where the lag rates and lag coefficients are not functions
of xk, Eqs.(3.11)-(3.14) are equivalent to Eqs.(3.2)-(3.3) and S∗n,k always equals Sn,k.
Also, S∗n,k is equal to Sn,k if xk−1 = xk in Eq.(3.11). Otherwise, S∗n,k is forced to be
consistent with qn,k, an(xk), and bn(xk). The information that is transmitted to the
next step in the convolution is now qn,k, which is depicted graphically in Figure 3.1(b).
The abstract structure of the non-LTI algorithm mirrors that of the LTI algorithm,
but with a different state variable and exposure-dependent equations.
In Eq.(3.11), S∗n,k depends on xk through h(k, xk) and xk is unknown. It is assumed
that h(k, xk) is a slowly varying function of xk and that h(k, y(k)) ≈ h(k, xk) for
purposes of the deconvolution. This can be improved upon by iterating between
Eqs.(3.11) and (3.12).
After the update functions F1 and F2 are given in the next section, details on how
bn(xk) and an(xk) evolve will be given.
Stored charge constraint
Physically, the amount of estimated stored charge in the FP should remain constant
when switching from one set of linear system parameters to another. Because the
system is causal, current inputs will not affect charge storage history. The state
variable update functions, F1 and F2 in Eqs.(3.11) and (3.14) enforce this constraint

CHAPTER 3. NON-LTI LAG CORRECTIONS 51
(a) (b)
Figure 3.1: (a) Flow chart for the LTI algorithm and (b) flow chart for the non-LTIalgorithm. An important modification made for the non-LTI algorithm is changingthe state variable to the estimated stored charge.
by calculating a consistent S∗n,k, so from Eq.(3.8)
S∗n,k = F1(qn,k, h(k, xk)) = qn,k1− e−an(xk)
bn(xk)e−an(xk), (3.15)
and conversely,
qn,k = F2(Sn,k, h(k, xk)) = Sn,kbn(xk)e
−an(xk)
1− e−an(xk). (3.16)
Another way to look at F1 and the calculation of S∗n,k is as a weighting or adjust-
ment of the exposure-dependent lag coefficients. An equation for S∗n,k can be written
out to give
S∗n,k =
(1− e−an(xk)
bn(xk)e−an(xk)
)(bn(xk−1)e−an(xk−1)
1− e−an(xk−1)
)Sn,k. (3.17)
The entire term weighting Sn,k in Eq.(3.17) can be transferred to weight bn(xk) in the
numerator of Eq.(3.12). Thought of this way, it indicates that the lag coefficients and
lag rates can not change independently; they must change in such a way that qn,k is
preserved.

CHAPTER 3. NON-LTI LAG CORRECTIONS 52
Exposure dependent lag coefficients: bn(x)
For an LTI system with a multi-exponential IRF of the form in Eq.(3.1), the analyt-
ical, unnormalized FSRF is given in Eq.(2.5), and repeated here as
FSRFunnormalized(k) =N∑n=1
xbn
1− e−ane−ank, (3.18)
Furthermore, the amount of charge that the FP can store, Q(x), is the summation of
the FSRF over all k and is repeated here from Eq.(2.11):
Q(x) =∞∑k=1
N∑n=1
xbn
1− e−ane−ank =
N∑n=1
xbne−an
(1− e−an)2. (3.19)
For an ideal falling step function all available charge traps should be filled. Thus,
Q(x) is both an estimate of the number of available charge traps at an exposure
x and an estimate of the maximum amount of charge that the FP can store. An
assumption here is that an equilibrium has been reached because the rates of trap
filling and emptying have become equal. Q(x) can be directly computed from FSRF
measurements of different magnitude step responses. From our experience the mea-
sured Q(x) changes nonlinearly with step-response magnitude on the FP [40], which
is consistent with the lag rates and coefficients changing with x.
Qn(x) is defined as the charge that can be stored by a single exponential term,
Q(x) =N∑n=1
Qn(x). (3.20)
As shown in Appendix A, the FSRF for traps at a single energy level, which is similar
to considering a single exponential term, can also be written out in terms of the
parameters of the photodiode as
y(t) = β2e−athermalt, (3.21)

CHAPTER 3. NON-LTI LAG CORRECTIONS 53
where traps are considered for a single energy level in the band gap, Etr, and
β2 = (f(Etr, 0)− fFermi(Etr))Nt(Etr)athermal. (3.22)
f(Etr, 0) is the initial value of the trap occupation function, fFermi(Etr) is the occupa-
tion function from a constant photocurrent or after an equilibrium has been reached,
Nt(Etr) is the trap density inside the band gap at the energy Etr, and athermal is the
rate at which charge is released from the traps.
Similar to Eq.(3.19), the amount of stored charge from the photodiode parameters
can be calculated by integrating Eq.(3.21) over time to give
Q = β2/athermal = (f(Etr, 0)− fFermi(Etr))Nt(Etr). (3.23)
While Eq.(3.23) does not explicitly depend on the exposure x, it does implicitly
through fFermi. Equating the stored charge associated with a single exponential term
in Eq.(3.19), Qn(x), and (3.23) gives
xbne−an
(1− e−an)2= (f(Etr, 0)− fFermi(Etr))Nt(Etr). (3.24)
f(Etr, 0)Nt(Etr) is the initial charge stored in the traps and fFermi(Etr)Nt(Etr)
is the final, or equilibrium value, of charge stored for a given exposure value. For
the FSRF experiment, the traps start full at x-ray turn-off, so a value of Q charge is
stored, and the final value is taken as zero, since we are only interested in changes in
the stored charge from the equilibrium value with no exposure. Rewriting Eq.(3.24)
in terms of initial and final charge notation gives
xbne−an
(1− e−an)2= QI −QF . (3.25)
Rearranging Eq.(3.25) to solve for bn gives
bn(x) =|qn,k −Qn(x)|
x
(1− e−an(x))2
e−an(x). (3.26)

CHAPTER 3. NON-LTI LAG CORRECTIONS 54
The absolute value has been introduced because the recursion formula will handle the
sign. The initial charge is exactly the estimated stored charge, qn,k, for a given frame.
For x = 0, Eq.(3.26) looks to be ill-defined, which would especially be a problem
for the FSRF measurements. However, it does not actually matter what the value of
bn is when x = 0 in Eqs.(3.11)-(3.14), because they can be reduced to the following
two equations with the single state variable qn,k:
xk =y(k)−
∑Nn=1 qn,k1− e−an(xk)∑Nn=1 bn(xk)
(3.27)
qn,k+1 = xkbn(xk)e−an(xk)
1− e−an(xk)+ qn,ke
−an(xk) (3.28)
The contribution to qn,k+1 from the current input xk becomes the only term weighted
by bn, and will equal 0 when xk = 0. Note, the denominator in Eq.(3.27) is still forced
to equal 1. Even for small values of xk, the contribution to qn,k+1 will be small. Thus,
a value of bn can be defined for small values of xk.
Finally, Eq.(3.26) can be further approximated for implementation as
bn(x) =Qn(x)
x
(1− e−an(x))2
e−an(x). (3.29)
The value of bn(x) from Eq.(3.29) will be equal to or larger than that of Eq.(3.26).
The approximation simply uses the bn associated with the FSRF measurement of the
same exposure intensity x.
Eq.(3.29) gives an expression for the coefficient bn(x) in terms of the total charge
that can be stored in the FP during the FSRF measurement, the current exposure
level on the FP, and the exponential rate.
Exposure dependent lag rates: an(x)
In Eq.(3.10), the dynamics of detector lag are split into N groups, each with its own
lag rate, an(x). For a detailed semiconductor model, Wieczorek [11] describes the
dynamics of trap filling and emptying at a specific energy level, Etr with a single,

CHAPTER 3. NON-LTI LAG CORRECTIONS 55
illumination dependent, exponential rate given by
a(Etr) = ν0[e−(Ec−Etr)/kT + e−(Ec−EFn)/kT ], (3.30)
where ν0 is the attempt-to-escape frequency for electrons, Ec is the energy level of
the conduction band edge, EFn is the quasi-Fermi level, k is the Boltzmann constant,
and T is temperature. In Eq.(3.30), a(Etr) is continuously modeled for each energy
level, instead of grouped into one of N energy ranges as in a multi-exponential model.
Eq.(3.30) can be broken into two parts, athermal and aexposure(n):
athermal = ν0e−(Ec−Etr)/kT (3.31)
aexposure(n) = ν0e−(Ec−EFn)/kT = ν0ne/Nc, (3.32)
where ne is the number of free electrons, and Nc is the effective density of states at the
conduction band edge. Note that aexposure(x) is directly proportional to the number
of free electrons, which is directly proportional to the incident signal, x, on the FP.
Eq.(3.31) represents the minimum rate at which trap dynamics occur, which is only
dependent on the thermodynamic level of the charge trap.
Similar to what can be done for Wiecorek’s rate in Eq.(3.30), we can break an in
Eq.(3.10) into a1,n and a2,n, where
an(x) = a1,n + a2,n(x). (3.33)
The base lag rate, a1,n, is a constant that corresponds to athermal and is independent of
the exposure level. The exposure-dependent lag rate, a2,n(x), corresponds to aexposure
and depends on the input exposure intensity level. Now, Eq.(3.10) is written as
h(k, xk) = b0δ(k) +N∑n=1
bn(x)e−(a1,n+a2,n(x))k. (3.34)

CHAPTER 3. NON-LTI LAG CORRECTIONS 56
3.2.3 Weighting Only Non-LTI
A different non-LTI algorithm has been suggested that only provides an intensity-
based weighting to previous projection data [14]. Compared to the non-LTI algorithm
just described, this intensity weighted lag correction is the same as setting a2,n = 0
for all n and removing the stored charge constraint used in calculating S∗n,k. The lag
coefficients are still adjusted as in Eq.(3.29) as a function of exposure to provide the
intensity weighting. From Eq.(3.8), changes in the lag coefficients result in a changing
estimate of qn,k, so the stored charge estimate will become inconsistent.
3.2.4 Calibration of Lag Correction Algorithm
Since it was found in Chapter 2 that N = 4 exponentials adequately describe the
RSRF, FSRF, and IRF for the Varian 4030CB FP, four constants and eight functions
of x must be found in Eq.(3.34). Not included, the value of b0 is fixed because the
sum of all bn is forced to equal zero. Another point to consider is that the radar
artifact present in CBCT imaging with a-Si FPs is due to the longer time constant
(smaller rate) exponentials of the impulse response. Therefore, only the two longest
time constant exponentials (n = 1, 2) need to be treated as functions of exposure. To
reduce complexity, the two shortest time constant terms (n = 3, 4) will be treated as
a true LTI system with constant lag coefficients bn and exposure-dependent lag rates
a2,n = 0. Therefore, the system will be described by six constants and four functions
of exposure.
Figure 3.2 summarizes the calibration process, which has three main steps: deter-
mining the base lag rates a1,n, the maximum stored charge Q(x), and the exposure-
dependent rates a2,n(x).
The first calibration step is to determine the base lag rates a1,n, which determine
the rate of charge release from the traps in the absence of irradiation of the FP.
Exponential rates determined from FSRF data should exactly measure these rates,
because with the x-rays turned off, there should be very little excess charge in the
conduction band to increase the exponential rates above the thermodynamic rates
in Eq.(3.30). To estimate these rates, FSRF data is fit with a multi-exponential

CHAPTER 3. NON-LTI LAG CORRECTIONS 57
Figure 3.2: Flowchart of the non-LTI calibration algorithm.
function (N = 4), and the fit rates are taken directly as the base lag rates. This can
be done for any exposure level. In general, choosing an exposure in the middle of
the dynamic range of the FP is best to avoid any potential saturation effects of the
amplifier electronics and to maintain excellent SNR in the fitting process of the long
time constant FSRFs.
The second calibration step is to measure Qn(x), which in turn is used along
with the lag rates an to determine the lag coefficients bn(x). Qn(x) is measured
from a series of FSRF experiments with different step-response magnitudes. At each
exposure level, the FSRF data is fit to a multi-exponential model, and then each
exponential term in the model is integrated from the first lag frame to infinity to
determine Qn(x).
The third calibration step uses a global search method to determine the best value
for a2,n(x) at a number of exposure levels. For RSRF data, the exposure-dependent
lag rates remain constant because the input to the FP is constant. The search method
will apply the deconvolution described in Eqs.(3.11)-(3.14) for many values of a2,1 and
a2,2 for each exposure level. Furthermore, each value of a2,1 and a2,2 will be used to

CHAPTER 3. NON-LTI LAG CORRECTIONS 58
calculate the lag coefficients at every point in the search space. The optimal exposure-
dependent lag rates at each exposure are those that produce an ideal, flat RSRF after
the correction. The metric used to determine the optimal exposure-dependent lag
rates is the standard deviation of the RSRF, which is at a minimum for the ideal
response.
For interpolating to other exposure levels, the exposure-dependent lag rates were
found to be reasonably well fit by an exponential function of the form
a2,n(x) = c1(1− e−c2x). (3.35)
This model forces the exposure-dependent lag rates equal to 0 at x = 0. If there were
an offset, it should show up in the measurement of the base lag rate.
ROI and global lag correction algorithms
Chapter 2 and other LTI corrections [18] used a single large ROI on the detector to
determine the IRF for lag correction. However, if the lag variability is significant
enough, a single ROI may not be an appropriate choice to characterize the lag for all
pixels on the FP. To study this, both the LTI corrections and non-LTI corrections
were calibrated in two ways each. The first is a global calibration method that simply
averages all pixels of the detector and calibrates a single IRF. The second is an ROI-
based method that segments the detector into small regions (16 × 16 pixels) that
were individually calibrated with IRFs or impulse response generator functions. For
either the ROI-based or global calibration algorithms, the deconvolution calculation
is always done on a pixel-by-pixel basis.
3.2.5 Experiments
Step-response and CBCT experiments were performed to examine the spatial uni-
formity of detector lag in the Varian 4030CB FP and to evaluate the differences
between using an LTI versus a non-LTI algorithm and an ROI-based versus a global
calibration.

CHAPTER 3. NON-LTI LAG CORRECTIONS 59
Step-response measurements
Just as in Chapter 2, the step-response measurements were fixed such that 600 RSRF
frames and 600 FSRF frames were collected, since our CT acquisitions are on the
order of 600 frames. Furthermore, all RSRF measurements were normalized by a
separate crystalline silicon photodiode attached to a ceramic GOS scintillator, also
described in Chapter 2. Normalization of the RSRF data to remove the temporal
response of the x-ray tube and generator is important when trying to estimate the
exposure-dependent lag rates, a2,n(x). Normalization with the separate photodiode is
not needed for the FSRF data since the x-ray source is capable of turning completely
off within a single frame for pulsed fluoroscopy.
The uniformity of detector lag was investigated by collecting FSRF data with
the gain corrections turned off. This was done in dynamic gain mode, but below
the threshold at which each pixel would switch to the low gain capacitor. The tube
setting used was 125 kVp, 10 mA, and 2 ms which resulted in a 3.7% exposure or a
detector output of 3700 counts. The 2nd and 100th lag frames were visually compared
and histograms of the frames were plotted to study the lag variability.
Step-response measurements were collected at nine different exposure levels rang-
ing from 2% to 92% of the FP saturation level and used to calibrate the LTI and
non-LTI algorithms. The x-ray tube protocols were the same as in Chapter 2 for the
nine highest exposure levels, and correspond to available x-ray source settings that
span the detector dynamic range. A different Varian 4030CB detector from Chapter
2 was used that had a slightly different sensitivity, resulting in slightly different %
FP saturation exposure numbers. For both ROI-based and global calibrations, the
LTI and non-LTI algorithms were performed on select cases of step-response data to
compare the lag correction effectiveness of each calibration. As in Chapter 2, the 1st
and 50th frame lags are reported for the FSRF data.
CBCT measurements
CBCT data sets were reacquired for the same two phantoms used in Chapter 2: a
large pelvic phantom (42 cm × 26 cm) and a uniform acrylic head phantom (20 cm

CHAPTER 3. NON-LTI LAG CORRECTIONS 60
× 16 cm). All of the acquisition and reconstruction parameters were identical to
those described in Chapter 2, with the exception that the final reconstructions in this
chapter are corrected for ring artifact, as is standard in CT imaging [41].
The CBCT projection data were corrected for lag using the LTI and non-LTI algo-
rithms with ROI-based and global calibrations. An intensity-weighted LTI algorithm
with a global calibration was also used for comparison. Since an IRF derived from
the detector FSRF was found to provide the best LTI correction of the radar artifact
in CBCT images, only IRFs derived from the nine FSRFs at different exposures were
used. The reconstructions using LTI corrections that give the minimum and maxi-
mum average error are compared to the reconstruction that made use of the non-LTI
algorithm.
As in Chapter 2, pairs of ROIs, 10 pixels on each side, that straddle the obvious
lag artifact boundary in the uncorrected data sets are defined. The difference in the
mean signals is calculated for each ROI pair and the average and maximum differences
for each image are used as the error metrics. For this chapter five pairs instead of four
were used, but the exact number should not affect the comparative results between
the different lag correction algorithms.
3.3 Results
3.3.1 Calibration of Lag Correction Algorithm
Table 3.1 lists the results of performing a four-exponential model fit to the FSRF
data at an exposure level of 27%. The listed values correspond to all of the neces-
sary parameters for the LTI correction calibrated at that exposure. The units for the
lag rates an are frames−1 and for the lag coefficients bn are (detector counts with
lag/detector counts without lag). For the non-LTI algorithm, the an entries corre-
spond to the base lag rates a1,n. Furthermore for the non-LTI algorithm, b1 and b2 will
become functions of exposure and a2,1(x) and a2,2(x) will be added to the calibration
information (shown further down). For the shorter time constants (n = 3, 4), the lag
coefficients will remain the constants listed and the exposure-dependent lag rates will

CHAPTER 3. NON-LTI LAG CORRECTIONS 61
a1 a1 a1 a1 b1 b2 b3 b4
2.6e-3 1.8e-2 1.4e-1 7.5e-1 5.2e-3 8.8e-3 1.2e-2 2.3e-2
Table 3.1: LTI IRF parameters from global calibration FSRF data at an exposurelevel of 27%. The base lag rates a1,n have units of frames−1 and the lag coefficientsbn have units of (detector counts with lag/detector counts without lag).
(a) (b)
Figure 3.3: Stored charge estimates for (a) the longest time constant and (b) thesecond longest time constant charge traps. Data points were fit with a 4th-orderpolynomial.
be set to 0.
Figure 3.3 shows the estimates for the number of available charge trap states
associated with the first two exponential terms, Q1(x) and Q2(x), from the step-
response experiments at different exposure levels. The data points are interpolated
using a 4th-order polynomial. The amount of stored charge in the smallest time
constant exponential (n=1) nearly equals the incident exposure on the FP for a
single frame of exposure (Figure 3.3(a)), thus highlighting that charge traps have
huge charge storage capabilities.
The optimal a2,1 and a2,2 found for each exposure level (black squares in Figure
3.4) using a global search optimization of Eqs.(3.11)-(3.14) are fit with an exponential
model (curves and equations in Figure 3.4) that guarantees a2,n(0) = 0. When the

CHAPTER 3. NON-LTI LAG CORRECTIONS 62
(a) (b)
Figure 3.4: Exposure-dependent lag rates for (a) the longest time constant and (b) thesecond longest time constant charge traps. Data points were fit with an exponentialfunction. The form of the function ensures that a2,n(0) = 0.
RSRF data is corrected using the exposure-dependent lag rates corresponding to the
correct exposure intensity, the normalized RSRF shows no appreciable rise time. This
is shown in Figure 3.5 for the 27% exposure.
3.3.2 Experiments
Step-response measurements
For the last frame of x-ray irradiation for a step-response measurement at a 5%
exposure with no gain correction, the circular shape of the x-ray beam intensity is
evident (Figure 3.6(a)). For lag frame two with no gain correction, there is some lag
variation visible across the panel (Figure 3.6(b)), with the largest variations occurring
near the edges of the FP. The non-uniformity in the gain-corrected 2nd and 100th
lag frames is the inverse of the x-ray irradiation pattern (Figures 3.6(c) and 3.6(d)).
For gain-corrected images, the width of the lag histograms decreases from 1.5% (with
a mean value of 3.2%) in lag frame 2 to a width of around 1% in lag frames 50
and 100, which have mean values of 1.1% and 0.8% (Figure 3.6(e)). The histogram

CHAPTER 3. NON-LTI LAG CORRECTIONS 63
Figure 3.5: The black data show the uncorrected RSRF and the gray data show thecorrected RSRF found during the global search for the optimal a2,n(x) at x = 27%.
of the detector lag for lag frame two after gain correction is slightly wider than the
histogram of the raw image because the x-ray intensity is very non-uniform across the
FP. However, it is important to consider the lag images after gain correction because
the gain correction step merges pixels from low and high dynamic ranges into a single
scale for dynamic gain imaging.
For the central 4 cm of the detector, the corrected 50th lag frame is visibly more
uniform for the ROI-based calibration (Figure 3.7(b)) than the global calibration
(Figure 3.7(a)). To evaluate the two calibration schemes, the signals in a large ROI
covering just under the central 4 cm of the detector (1000 × 100 pixels) were com-
pared. The average signals in the ROIs indicate that both the ROI-based and the
global correction algorithms achieve high levels of lag reduction (Figure 3.7(c)). The
ROI-based algorithm has a smaller standard deviation, especially for the first two
hundred frames (Figure 3.7(d)), which indicates a much greater image uniformity in
the correction. The standard deviation of the global algorithm matches that of the
uncorrected data, which is expected since that IRF was calibrated with the average
response of the FP.
Similar to the LTI algorithm in Figure 3.7, the ROI-based non-LTI algorithm
does a much better job of reducing the non-uniformity in the lag compared to the
uncorrected and global calibration algorithms (Figure 3.8). Interestingly, the global

CHAPTER 3. NON-LTI LAG CORRECTIONS 64
(a) (b)
(c) (d)
(e)
Figure 3.6: (a) The last frame of x-ray irradiation for a step-response measurementwith no gain correction. (b) Raw lag frame two with no gain correction applied;the greatest lag variation occurs near the edges of the detector. Gain-corrected andnormalized lag images for lag frames (c) 2 and (d) 100. The strong circular patternin the gain-corrected lag images is the inverse of the x-ray intensity. (e) Histogramsof pixel values for raw lag frame 2 and gain-corrected lag frames 2, 50, and 100. Forall images, the object in the lower right corner is a c-Si photodiode used to normalizethe x-ray source output. Exposure is 3.7% of saturation.

CHAPTER 3. NON-LTI LAG CORRECTIONS 65
(a)
(b)
(c) (d)
Figure 3.7: 50th lag frame for an LTI correction based (a) on a global calibration and(b) on a per-pixel basis. Window, level = 25, 0 detector counts. Both algorithmsdrastically reduce the average error over the entire ROI (c), but the ROI-based algo-rithm has a more uniform output for lag frames based on the standard deviation ofa large ROI versus lag frame number (d).

CHAPTER 3. NON-LTI LAG CORRECTIONS 66
calibration algorithm shows some improvement in the image uniformity over the un-
corrected algorithm (Figure 3.8(c)). Around frame 200 the uniformity results for the
global algorithm oscillate between those of the ROI-based and uncorrected data sets.
The oscillations may be due to the non-LTI algorithm adjusting bn(x) and an(x) over
time in response to the spatial variations.
Figure 3.9(a) shows uncorrected and corrected FSRF data at different exposure
intensities (2.0% - 92.0%) using an IRF that was derived for an exposure of 27%
of FP saturation. The FSRFs are normalized to the average of the detector signal
during irradiation, and it is evident from the uncorrected FSRFs that the lag signal
for the higher exposure (92%) FSRF is a smaller fraction of the incident signal than
the FSRF at 2%. Because of this exposure dependence, the LTI corrections show a
range of responses. Since the IRF was calculated from a single exposure, the 27%
corrected FSRF is well corrected, but the 2.0% FSRF is under-corrected and the
92% FSRF is over-corrected. Figure 3.9(b) shows a similar comparison, but for the
non-LTI algorithm. Looking at the three corrected FSRFs at different exposures,
the non-LTI calibration clearly accounts for the exposure dependence of the charge
trapping.
Table 3.2 summarizes the 1st and 50th frame residual lags for uncorrected step-
response data, for step-response data corrected with an LTI algorithm calibrated
at 27% of the FP saturation exposure, and for step-response data corrected with
the non-LTI algorithm. The listed values are the averages over the central 4 cm of
the FP using the global calibrations. The LTI algorithm performs slightly better at
the 27% exposure since it was calibrated specifically for that data, although both
algorithms do well. The first frame lag for the 92% exposure is also lower for the LTI
algorithm, but this is actually an artifact of the LTI correction creating such a large
over-correction for the 92% FSRF data. The non-LTI algorithm consistently has less
than 0.3% 1st frame lag and less than 0.01% 50th frame lag.
CBCT measurements
Figure 3.10(a) shows the reconstruction from an uncorrected projection data set along
with the ROIs used for error calculations. The average and maximum ROI errors are

CHAPTER 3. NON-LTI LAG CORRECTIONS 67
(a)
(b)
(c)
Figure 3.8: 50th lag frame for the non-LTI correction based on (a) a single ROI and(b) 16 × 16 pixel ROIs. Window, level = 25, 0 detector counts. (c) The globalcorrection shows an improvement of the output uniformity in the lag frames, but theROI-based algorithm maintains a more uniform output.

CHAPTER 3. NON-LTI LAG CORRECTIONS 68
(a) (b)
Figure 3.9: Uncorrected and corrected FSRFs for step-response data at several differ-ent exposures, (a) LTI corrections derived from a 27% step-response and (b) non-LTIcorrection which takes into account the exposure dependence.
Exposure level
Lag correction algorithm
Residual 1st frame lag
Residual 50th frame lag
2% Uncorrected 3.7% 0.96% 2% LTI 1.4% 0.48% 2% Non-LTI 0.25% -0.0028%
27% Uncorrected 2.8% 0.45% 27% LTI 0.25% 0.0038% 27% Non-LTI 0.29% 0.0052% 92% Uncorrected 2.4% 0.28% 92% LTI 0.0053% -0.16% 92% Non-LTI 0.16% 0.0034%
Table 3.2: Summary of 1st and 50th frame residual lag for uncorrected, LTI, andnon-LTI algorithms using global IRF calibrations.

CHAPTER 3. NON-LTI LAG CORRECTIONS 69
35 HU and 52 HU, similar to measurements for a different Varian 4030CB FP [40].
The fact that the errors change slightly from detector to detector highlights the need
for detector-specific calibrations.
Figure 3.10(b) is the reconstruction using the LTI correction with the smallest
average ROI error (best case) and Figure 3.10(c) is the reconstruction with the largest
ROI error (worst case). The reconstruction using the best-case impulse response
reduced the average ROI error to 14 HU, although a blurred ring artifact remains
[40].
Figure 3.10(d) shows the pelvic reconstruction using the intensity weighted lag
correction algorithm where a2,n(x) was assumed to be 0 for all n [14]. The center
shading has been slightly reduced by this algorithm compared to the other recon-
structions, but the radar artifact is still clearly visible. Thus, the exposure dependent
rates in the non-LTI algorithm, a2,n(x), and the stored charge constraint are impor-
tant aspects in the correction procedure.
Little difference is seen between the reconstructions using an ROI-based non-LTI
correction (Figure 3.10(e)) and global non-LTI calibrations (Figure 3.10(f)), although
the reconstruction from the global calibrated lag correction has slightly less shading
in the center of the phantom.
Figure 3.11 shows reconstruction results for the uniform acrylic head phantom
with a narrow window of 100 HU. The outline artifact that is especially prominent
on the right side of each reconstruction is a result of the dynamic gain mode of the
detector and none of the lag corrections should affect it. In spite of this artifact, the
radar artifact is still quite evident in the uncorrected reconstruction (Figure 3.11(a)),
which also shows the five pairs of defined ROIs. The worst-case LTI correction (Figure
3.11(c)) only partially corrects the radar artifact to an average ROI error of 11 HU.
Both the best-case LTI (Figure 3.11(b)) and non-LTI (Figure 3.11(d)) corrections
work well at reducing the average ROI error to 2 or 3 HU.
For the pelvic and head phantoms, Table 3.3 summarizes the average and max-
imum errors that result from using the different lag correction techniques on the
CBCT projection data. For the pelvic phantom, the non-LTI correction outperforms
all LTI corrections and the intensity weighted LTI algorithm. For the head phantom,

CHAPTER 3. NON-LTI LAG CORRECTIONS 70
(a) (b)
(c) (d)
(e) (f)
Figure 3.10: 1 × 1 × 5 mm reconstructions of a pelvic phantom (42 × 26 cm) with(a) no lag correction, (b) best LTI correction, (c) worst LTI correction, (d) intensityweighted lag correction, (e) global non-LTI correction, and (f) ROI-based non-LTIcorrection. Window, level = 200, -25 HU.

CHAPTER 3. NON-LTI LAG CORRECTIONS 71
(a) (b)
(c) (d)
Figure 3.11: 0.5 × 0.5 × 5 mm reconstructions of a pelvic phantom (20 × 16 cm)with (a) no lag correction, (b) best LTI correction, (c) worst LTI correction, and (d)non-LTI correction. Window, level = 100, -25 HU.

CHAPTER 3. NON-LTI LAG CORRECTIONS 72
Pelvic Phantom Head Phantom Error (HU) Avg Max Avg Max
Uncorrected 35 52 16 21 LTI single ROI (best) 14 27 2 7 LTI single ROI (worst) 19 35 11 14 LTI multi ROI (best) 14 26 2 5 LTI multi ROI (worst) 20 35 11 13 Non-LTI single ROI 11 19 3 5 Non-LTI multi ROI 11 20 3 7 Intensity Weighted 15 31 9 12
Table 3.3: Summary of ROI reconstruction errors for different lag correction algo-rithms.
the non-LTI correction provides comparable results to the best LTI correction, but
outperforms the worst case LTI correction and the intensity weighted algorithm.
3.4 Discussion and Conclusions
A novel non-LTI lag correction algorithm has been developed that outperforms the
corresponding LTI technique. The algorithm performance is better than that of the
best-case LTI performance for the pelvic phantom, but has the added benefit of re-
moving the residual blurred ring artifact seen in Figure 3.10(b). Importantly, the
algorithm is not sensitive to the calibration exposure intensity or step-response tech-
nique because a range of exposure techniques and both RSRF and FSRF data are
used in the calibration. The non-LTI algorithm developed is based on a reconstruc-
tion that deconvolves the projection data with an IRF, but the IRF can change for
each frame. The estimate of stored charge trapped by each exponential term in the
current frame, qn,k(x), is held constant when switching from one IRF to another and
determines the initial condition to be used for the subsequent deconvolution step.
An interesting outcome of this work is the comparison between the 16 × 16 pixel
ROI-based calibration and the global calibration method. For corrected FSRF mea-
surements, a noticeable improvement in image uniformity was observed with the ROI-
based calibration. However, for the CBCT reconstructions, little difference is observed

CHAPTER 3. NON-LTI LAG CORRECTIONS 73
in image quality between the ROI-based and global calibrations. This might be be-
cause the image non-uniformity due to lag is extremely small when compared to the
high dynamic range of CT data. Furthermore, the non-uniformity is low frequency
and is more pronounced at the edge of the detector. For CBCT measurements, re-
gions much smaller than the entire detector experience the radiation history that is
the cause of the radar artifact. Looking at the smaller regions, detector lag may be
uniform enough. While not improving the error metric used here, the ROI-based cal-
ibration may improve the noise properties in the final CBCT reconstructions, which
will be the subject of a future investigation.
Similar to the LTI algorithm, the calibration of the base lag rates a1,n in the non-
LTI algorithm require the choice of a single exposure level. From our experience with
the non-LTI algorithm, using different exposure intensities to determine the base rate
gives very similar lag correction results. Future work will explore this relationship
further.
For scintillators, the deviation from an ideal RSRF is known as gain hysteresis
and the lag signal associated with the scintillator is known as afterglow [39]. The
scintillator used on the Varian 4030CB, CsI doped with thallium, has been measured
to have a gain hysteresis, or increase in measured signal with exposure, of 10% and
a first frame afterglow (at 15 fps) of less than 1% [42] (compared to the first frame
lag of a-Si of 2-7% first frame lag [43, 44]). This is due to filling of traps inside
the scintillator, which will eventually release their charge via an optically radiative
relaxation to create the afterglow signal [45]. Similar to a-Si which has long time
constant traps, the time constants for charge release in the CsI traps can be greater
than 1000 minutes [42]. Since the temporal response of the scintillator is due to a
trapping mechanism that is very similar to that in the a-Si, the described correction
algorithm should correct for the non-ideal scintillator response of the Varian 4030CB.
Other scintillators, such as CsI doped with samarium, have temporal responses due
to other physical mechanisms than charge trapping, so for those detectors a separate
scintillator model may be necessary for the software correction algorithm.
Lag has the effect of producing noise correlations, or smoothing, in projection data
and CBCT reconstructions. This form of noise reduction may actually be desirable

CHAPTER 3. NON-LTI LAG CORRECTIONS 74
for applications like low-dose fluoroscopy, but is not desirable for CBCT reconstruc-
tions. Because software lag corrections remove the effect causing the noise correlation,
image noise will increase in lag-corrected images. Furthermore, any noise processes
that enter the image chain between the addition of the lag signal and the lag correc-
tion step, such as electronic noise or quantization error, will be enhanced by the lag
correction algorithm. Since lag generally causes a decrease in the high frequencies of
the noise power spectrum (NPS), the lag correction will counteract that by boosting
up the high frequencies of the NPS, including all noise processes after lag [46, 47].
Moreover, lag corrections with any imperfections, especially when applied on an indi-
vidual pixel basis, may introduce their own correction noise. Since the radar artifact
is such a broad area artifact, it should be possible to minimize any noise introduced
by the lag correction. For the purposes of this work, the lag reduction algorithms
were applied to the projection data and then reconstructed with a standard pipeline.
An alternative method would be to reconstruct the CBCT projection data with and
without the lag correction applied, doubling the computational load to produce two
reconstructions. The difference between the two reconstructions corresponds to an
additive lag correction term for the CBCT image. Smoothing or adaptive filtering
could be used to remove noise from the lag correction term prior to addition to the
uncorrected reconstruction. The key to the filtering would be preserving the sharp
boundary of the lag correction, but still removing pixel noise. This may be equivalent
to smoothing or adaptively filtering the lag corrected projection data and performing
a single reconstruction.
In Figure 3.4, the exposure-dependent lag rates were forced to go through the
origin because because any offset should have been measured in the base lag rate
measurements with no exposure. However, Figure 3.3 does not make the same con-
straint for Qn(x). Physically, Qn(x) is an estimate of the number of charge traps
available at an exposure level x. There are many charge traps available for electrons
at zero exposure in the a-Si naturally, so the model does not need to be forced to
zero.
In the pelvic phantom reconstructions in Figure 3.10 there is a shading artifact
that appears near the center of each image. The off-center detector reconstructions

CHAPTER 3. NON-LTI LAG CORRECTIONS 75
for such a large pelvic phantom are particularly sensitive to scatter artifacts [48]. The
lag corrections affect the center shading slightly, but for the most part, the artifact is
fairly consistent across all reconstructions using different lag corrections.
Wieczorek developed a lag correction algorithm that also captures the nonlinear
effects of the a-Si photodiode [11]. However, there are some important differences
between that algorithm and the one presented here. First, the equations that Wiec-
zorek developed implicitly assume that the input is a scaled step-response and not
a time-varying signal. This is shown in more detail in Appendix B. The Wieczorek
solution does not hold for a time-varying input because the time-varying case results
in differential equation with variable coefficients. A possible extension of Wieczorek’s
work is to apply it for very short time periods, similar to our method, and then to
calculate consistent initial conditions for the next time step. A second important dif-
ference between the two works is that Wieczorek defines his model in terms of many of
the semiconductor parameters, while our algorithm derives everything from measured
RSRF and FSRF data. For many end users of the a-Si FPs, the parameters necessary
for the Wieczorek model may be difficult to determine; our calibration procedure re-
quires no intimate knowledge of the semiconductor properties. Finally, the algorithm
presented here is computationally efficient, while the Wieczorek algorithm is a more
complex calculation since the trap states are considered to exist in a continuum.
The approximation of Eq.(3.29) appears to be an acceptable one for correcting the
radar artifacts in CBCT reconstructions. The approximation works well for correcting
the FSRF data in Figure 3.9 since the true value of bn is approximated with the value
derived from an FSRF data set. Furthermore, the exposure history that creates the
radar artifact in the FP is very similar to a falling edge response, since the detector
elements quickly change from full exposure to a very low exposure because of the
attenuation of the phantom. Future work should look at using the true values of
bn from Eq.(3.26) to see if any further improvement is made. Any improvement
from using Eq.(3.26) over Eq.(3.29) could not be tested using simple RSRF or FSRF
data, but would have to use exposure sequences that transition between two or more
non-zero exposure levels.
In summary, the non-LTI lag correction algorithm presented removes the radar

CHAPTER 3. NON-LTI LAG CORRECTIONS 76
artifact similar to or better than LTI techniques, removes the residual blurred ring
present in LTI lag corrections, and has less ambiguity in the calibration of the al-
gorithm parameters. Future work will focus on evaluating its noise properties and
mitigating any potential noise increase.

Chapter 4
Forward Bias Lag Correction
4.1 Introduction
In contrast to the previous two chapters, several hardware approaches also exist to
remove lag from an a-Si FP detector. One simple approach is to insert empty frames
(x-ray source turned off) between acquired x-ray frames to flush the lag signal out of
the detector during acquisition [17]. While much of the lag signal is removed this way
because it decays exponentially, the introduction of empty frames decreases frame
rate and increases scan time for CBCT. Furthermore, traps at deeper energy levels in
the band gap will not have emptied and may still contribute to the detector output.
Another method is to use LEDs to illuminate the a-Si and saturate the traps between
detector readout and x-ray illumination [15]. With this approach, lag is actually
increased in the panel, but is a completely uniform offset.
A similar trap saturation approach that operates the photodiodes in a forward
bias mode has been introduced [49, 50]. Figure 4.1(a) shows the circuit diagram of a
pixel, readout electronics, and the forward bias modification operating in the reverse
bias mode. In a standard firmware mode for the Varian 4030CB detector, the a-Si
photodiode is placed in a reverse bias mode and then disconnected via a thin-film
transistor (TFT) acting as a switch from the readout circuitry prior to illumination.
When illumination ends, the photodiode is reset to the reverse bias state by the
readout electronics and the integration capacitor is reset by the switch across it.
77

CHAPTER 4. FORWARD BIAS LAG CORRECTION 78
(a) (b)
Figure 4.1: Circuit diagram of pixel with forward bias modification. (a) The pixel inreverse bias, disconnected from the readout electronics during the illumination stage.(b) The pixel in the forward bias stage where a large current is pushed through thephotodiode.
For the new trap saturation method, known as the forward bias (FB) method, the
operation of a pixel starts in a similar way. The photodiode is illuminated in a reverse
bias manner and read out as normal, followed by a positive voltage briefly applied
across each photodiode, thus inducing a much larger current through the diode than
normal. The circuit during forward bias is shown in Figure 4.1(b), where the reset
switch across the capacitor is closed to provide a path to ground. The larger current
has the effect of uniformly filling all charge traps in the photodiode. After the forward
bias scan, the photodiode is reset to the reverse bias state and photodiode illumination
can occur.
This chapter explores the lag ghost and CT artifact reduction capabilities of the
FB method and compares it to a standard imaging mode. Limitations of the FB
method are discussed, as well as the feasibility of a hybrid lag reduction method that
uses the FB method in conjunction with a software correction. Such a hybrid mode
may mitigate the limitations of the FB method.
The chapter is organized as follows. Section 4.2 describes the experiments done

CHAPTER 4. FORWARD BIAS LAG CORRECTION 79
on a Varian 4030CB detector modified to run either the FB or standard imaging
firmware. Experiments to measure the lag reduction effectiveness are also described,
as well as typical detector measurements such as SNR, MTF, and DQE. The idea of
a hybrid software-hardware mode is introduced. Finally, a comparison between the
non-LTI software correction of Chapter 3 and the FB method is made. Section 4.3
presents the results of those experiments, and Section 4.4 discusses those results and
future work that can be done to further improve the FB method.
4.2 Methods and Materials
A Varian 4030CB flat panel x-ray detector was modified to operate in the FB mode as
part of a table-top x-ray system [49, 50]. The modified detectors were able to operate
in the 0.5 pF and 4 pF fixed-gain modes (with analog gain = 1) as well as standard
imaging modes [51]. All experiments were conducted at either 10 or 15 fps to achieve
sufficient SNR. For pulsed fluoroscopy, the FB firmware has a maximum pulse width
of 18 ms for a frame rate of 15 fps and 32 ms (the x-ray generator maximum) for 10
fps. Because of power considerations, all pixels in the FP cannot be forward biased
at once. Thus, Nrows rows in each half of the panel (the top and bottom halves of the
panel operate semi-independently) are switched to the FB state. Then, the group of
Nrows rows acts as a sliding window and moves across the panel, until all rows have
been appropriately forward biased.
4.2.1 Forward Bias Evaluation with Visible Light
The CsI scintillator in the Varian 4030CB is transparent to light, which allows for
direct photodiode illumination with the detector cover and electromagnetic shield
removed. Taking advantage of this, the modified flat-panel was first investigated
using visible light to remove any possible noise sources associated with the x-ray
source and generator.
In this setup, there are several parameters related to the FB stages to optimize,
such as the number of pixel rows to simultaneously activate for FB, the FB voltage

CHAPTER 4. FORWARD BIAS LAG CORRECTION 80
in the circuit (which is defined as the voltage across the diode and the TFT, and
determines the FB current), and the duration of time that the FB current should
be on for each pixel. To make sure true FB current was measured and not any
additional current due to parasitic capacitance, the first Nrows rows in each panel half
were forward biased for 1 ms. This is much longer than typical FB times of 40-80
µs and was for current measurement purposes only. The forward bias current was
determined from the voltage across a 50 Ohm resistor in series with the photodiode.
Overall, the parameters measured should be interrelated for a given FB current.
The total charge, Qtotal, that a given photodiode receives is
Qtotal =TImeas
2NrowsNpixels
. (4.1)
The amount of time that a specific detector row is forward biased during one frame
is T , where
T =Nrows
F. (4.2)
F is the frequency at which rows are cycled through during the FB step, Imeas is the
measured FB current for all rows, and Npixels is the number of pixels, or photodiodes,
per row. For the 4030CB, Npixels = 2048. The factor of two in Eq.(4.1) occurs
because the top and bottom halves of the FP are operated simultaneously, yet the
current measurement includes both. The photodiode FB currents were measured as
a function of the number of active forward bias rows and the driving forward bias
voltage.
To determine the effectiveness at improving the detector temporal response of
different forward bias voltages, scan frequencies, and the total amount of charge
injected into each photodiode, the rising step-response function (RSRF) and falling
step-response function (FSRF) for the Varian 4030CB FP were measured under visible
light illumination. The RSRF measurements were made by illuminating the detector
for 256 frames followed by 256 frames of FSRF measurements. A 2D array of LEDs
under computer control and synchronized to the detector readout at 10 fps was used

CHAPTER 4. FORWARD BIAS LAG CORRECTION 81
for illumination.
4.2.2 Lag Removal Measurements
For the rest of the experiments in this chapter, the FB parameters were set to achieve a
charge per pixel that was more than sufficient for adequate lag removal. Specifically,
groups of eight detector rows were simultaneously forward biased with 4 V at a
100 kHz rate. This setting results in 20 pC/photodiode, which is well above the 6
pC/photodiode found necessary for lag removal. The excess charge has a minimal
effect on the pixel dynamic range because most of the leaked charge is removed via
extra reset cycles and analog charge subtraction prior to A/D conversion.
Step-response tests were performed under x-ray irradiation at a fixed FB protocol
of 20 pC/diode for the 0.5 pF and 4 pF detector modes for both the FB setup and
standard modes. For these tests, the RSRF and FSRF were each measured for 600
frames. For further comparison, a piece of CsI scintillator coupled to a crystalline
silicon photodiode was irradiated in a similar setup. The crystalline silicon photodiode
should have no charge traps, and thus no lag signal of its own. Thus, the measured
response is that of the scintillator alone. To remove noise and any output drift
associated with the x-ray source and generator, both the Varian 4030CB and the
crystalline silicon photodiode with CsI scintillator were normalized by the output of
another crystalline silicon photodiode with ceramic (GOS) scintillator (Hamamatsu
S-8193). The GOS scintillator has a much faster time response than CsI, and for
the purposes of these experiments is assumed to be ideal. All data were further
normalized to the average of the last 10 frames of the measured RSRF for scaling
purposes.
A step-wedge phantom was used to measure the ability of the FB method to
visually reduce lag ghosts in the a-Si FP. Following 500 frames of irradiation, 500
frames of the FSRF were collected for a standard dual gain imaging mode and a low
gain (4 pF) FB mode. The x-ray protocol was 100 kVp, 30 mA, and 13 ms at 15
fps. The resulting ghost contrast of the step phantom was measured for lag frames
shortly following the end of x-ray exposure, and for 100 frames after.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 82
4.2.3 SNR, MTF, and DQE
For measuring SNR, the modulation transfer function (MTF), and the detective quan-
tum efficiency (DQE), an RQA5 spectrum was used [52]. For the x-ray source used
for these measurements, the RQA5 calibration corresponds to an x-ray tube setting
of 71 kVp and 21 mm of additional Al filtration. X-ray exposures were measured
with an Inovision ion chamber.
For the SNR measurements, the noise level was calculated as the standard devia-
tion of large ROIs in flat field images, and the signal was calculated as the average.
Gain corrections for the detector modes were performed prior to the experiments and
whenever detector modes were switched, and offset corrections were performed prior
to each acquisition.
For the MTF and DQE measurements, mAs settings for the x-ray source were
chosen that resulted in signals above the typical electronic noise level of the detector.
For the 0.5 pF and 4 pF detector modes, exposures of 523 and 1383 nG/frame were
used to achieve this. A tungsten edge was used to calculate the pre-sampling modu-
lation transfer function (MTF) of the a-Si FP in forward bias and standard imaging
modes. The MTF was measured in the both the horizontal and vertical directions.
Furthermore, the noise power spectrum (NPS) and DQE were also measured for the
different modes according to the method described in the IEC standard [52].
4.2.4 Detector Mode Switching
Saturating the charge traps in a-Si photodiodes, either by light illumination or forward
biasing, may limit the detector performance. First, charge trap saturation creates
larger offset currents inside the detector, which one would expect to increase the dark
noise of the system. Second, it takes some amount of time to saturate the charge traps
during every frame cycle, thus lengthening the x-ray frame time and/or shortening
the time available for x-ray exposure. For the modified FB panel, this is especially
true. The current source and sink specifications of the charge amplifiers limit the
ability to forward bias every pixel at the same time, further increasing the FB time.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 83
One approach to mitigate these limitations would be to forward bias the photodi-
odes prior to x-ray exposure and then switch to a standard x-ray acquisition timing.
However, our experience has been that switching the detector timing characteristics
(i.e., switching from a FB timing to a standard timing) results in large offset drifts
for many frames following the switch. These offset currents may still be smaller than
those created by forward biasing the photodiode. Software lag corrections [18, 20]
could then be used to remove any residual lag that occurs during x-ray irradiation.
An advantage of this switching approach over a software-only correction is that
if some of the charge traps remain saturated from the FB stage, a followup software
method would have to characterize and correct for a smaller residual detector lag.
That smaller signal might be better corrected by current LTI methods, since linear
approximations to non-linear systems work better for smaller deviations around an
operating point. Current software-only methods are still prone to residual error after
correction [18, 40]. A second advantage of the hybrid approach is that the FP detector
would be placed into a known trap state prior to x-ray exposure, essentially erasing
any potential effects from previous exposures. Finally, the involved calibration nec-
essary for the non-LTI correction of Chapter 3 for every detector could potentially be
avoided.
To determine the feasibility of such a detector mode, the detector output for
several hundred frames was captured after switching from a 4 pF FB mode to a
standard 4 pF detector mode. The experiment was repeated three times for different
periods of time (10s and 60s) spent in the FB mode. Note, this experiment used no
irradiation on the detector, since only offset currents were of interest.
4.2.5 CBCT Reconstructions
CBCT data sets of two different phantoms were acquired: a pelvic phantom (30 cm
× 26 cm) and a uniform acrylic head phantom (20 cm × 16 cm). For the pelvic
phantom, only the inside part of the large pelvic phantom from Chapters 2 and 3 was
used. This is because the FB method was only implemented for fixed-gain techniques,
which do not work well for the largest phantoms. Each phantom was scanned in three

CHAPTER 4. FORWARD BIAS LAG CORRECTION 84
different detector modes: (1) a standard dynamic gain mode, (2) a standard low gain
(4 pF integration capacitor) mode, and (3) a low gain mode with forward biasing. In
each mode the pixels were binned 2×2, giving a detector resolution of 0.388 mm. The
detector was operated in each mode at 10 fps for 625 projections. The tube protocols
were chosen to give high SNR. For the pelvic phantom, a pulsed fluoroscopy protocol
of 125 kVp, 80 mA, and 30 ms was used in an offset detector geometry (16 cm offset).
For the uniform acrylic head phantom, a tube protocol of 125 kVp, 63 mA, and 20
ms was used. For all setups a 10:1 anti-scatter grid, an 8:1 Al bowtie filter, and 1.0
mm Ti plus 0.25 mm Cu filter were used. The x-ray beam was also collimated to
approximately 2 cm in the conebeam direction at the detector for data acquisition to
minimize any scatter effects. The same normalization phantoms and reconstruction
algorithms were used as in Chapters 2 and 3.
A pair of ROIs, 10 × 10 pixels, that straddle the obvious lag artifact boundary in
the dynamic gain reconstructions were defined. The radar artifact error is taken as
the difference in mean signal between the two ROIs.
4.2.6 CBCT Comparison to Non-LTI Software Method
For comparison purposes, the previously described non-LTI software correction was
applied to the pelvic phantom projection data. Calibration of the non-LTI correction
was performed for the modified forward bias panel using standard firmware and a
standard dynamic gain configuration of the Varian 4030CB. The software correction
was calibrated using ten different exposure intensities spanning the range of the panel.
A global calibration was performed since it gave nearly identical results to the ROI-
based calibrations in the previous chapter.
4.3 Results
4.3.1 Forward Bias Evaluation with Visible Light
The total FB current for the detector versus Nrows is shown in Figure 4.2(a). For
normal amplifier operation, one would expect the total current to be linear with Nrows.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 85
(a) (b)
Figure 4.2: (a) Total forward bias current and (b) Current per active row versusnumber of active rows. The total amount of current saturates with increasing numberof rows, instead of being linear. The maximum current per row occurs at Nrows = 4for 3 and 5 V data.
For a FB voltage of 5 V, the relationship is fairly linear from one to four active rows,
but begins to fall off slightly above that. At ten rows the current appears to approach
saturation. For the 3 V data, the current also begins to saturate for a similar number
of rows but at a lower total current. Saturation effects of the charge amplifiers in the
panel limit the total amount of current that can be sourced for that many rows, thus
causing the total current to be nonlinear with Nrows. If the results are examined as
a function of current per row as shown in Figure 4.2(b), the maximum value occurs
at four active rows for both the 3 and 5 V data.
In Figure 4.3 the current-voltage relationship between the photodiode FB current
and the FB voltage is shown. For a given number of rows, the relationship is quite
linear past the necessary turn-on voltage of around 2 Volts. As expected from Figure
4.2, the i-v curve for Nrows = 8 is shifted slightly lower than that for 4 active rows.
Figure 4.4(a) shows the lag data taken as a function of FB voltage with 8 active
rows at a scan frequency of 100 kHz. Results for 4 active rows, not shown, are similar
but with slightly worse responses for identical voltages because the total photodiode

CHAPTER 4. FORWARD BIAS LAG CORRECTION 86
Figure 4.3: Forward bias current versus voltage. Current is approximately linear withvoltage, after the turn-on voltage of around 2.0 V. Current is smaller for 8 active rowsbecause of saturation in the charge amplifiers.
turn-on time is halved. Improvement in the RSRF occurs until 2.4 V, and improve-
ment in the FSRF is seen until 2.9 V. Figure 4.4(b) shows the lag data taken as a
function of the FB scan clock frequency. For this case of 4 active rows and FB voltage
of 3.3V, frequencies greater than 200 kHz have worse lag responses than frequencies of
100 kHz and lower because of shortened FB time. In fact, for a frequency of 333 kHz,
the system appears to have an enhanced instability that causes the lag to become
slightly greater than the no FB case at frame 400 and greater.
As mentioned above, Nrows, the FB frequency, and the FB voltage all determine
the total amount of charge that is placed into each pixel. Measured RSRF and
FSRF data taken with visible light irradiation are shown in Figure 4.5 for different
amounts of charge injected into the photodiodes during the forward bias cycle. To
achieve the different amounts, Nrows, F , and the forward bias voltage were changed.
For increasing amounts of charge, the measured responses approach the ideal step-
response. At 5.8 pC/diode, a lag reduction of 95% is achieved for the first frame lag.
Little improvement is seen for greater amounts of charge injected.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 87
(a) (b)
Figure 4.4: Step-response improvement versus (a) forward bias voltage and (b) scanfrequency. Higher voltages result in larger forward bias currents, and improved tem-poral response. Higher frequencies result in less forward bias time, and worse temporalresponses. 333 kHz has some measured instability that actually increased the lag overthe no forward bias case.
Figure 4.5: Using a pulsed light source synchronized with the detector at 10 fps,measured RSRF and FSRF data are plotted for different amounts of charge injectedinto the photodiodes. The different protocols varied in the voltage, frequency, andnumber of active rows used to modulate the amount of charge. The improvementin RSRF and FSRF quality of response correlates well with the amount of chargeinjected. For 5.8 pC/diode, a reduction in first frame lag of 95% is achieved.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 88
(a) (b)
Figure 4.6: (a) RSRF and (b) FSRF measurements for the FB mode, standard mode,and a silicon photodiode with CsI scintillator. The RSRF is not fully correctedbecause it is limited by the temporal response of the scintillator, which is measuredwith a crystalline silicon photodiode with no charge traps. The asymmetry of thescintillator response is quite evident in the FSRF measurement since it looks nearideal for the FB mode.
4.3.2 Lag Removal Measurements
Figure 4.6 shows measured RSRF and FSRF data under x-ray irradiation with an
FB charge injection of 20 pC/diode. Interestingly, Figure 4.6(b) is very similar to the
FSRF response under light illumination in Figure 4.5. However, the RSRF response
in 4.6(a) looks quite different for the RSRF with light. While the x-ray RSRF with
FB shows improvement over the standard x-ray RSRF, it is still less than the ideal
response. This is due to the temporal limitations of the CsI scintillator. Also shown
in Figure 4.6(a) is the RSRF measurement for a crystalline silicon photodiode with a
detachable piece of CsI scintillator. The crystalline silicon photodiode should have a
near ideal response since it has no charge traps and subsequently no lag. However, an
exponential rise of around 0.7% over 600 frames is still seen in the crystalline silicon
RSRF, which represents the response of the CsI scintillator.
Figure 4.7 shows the persistence of lag ghosts for a standard dual gain imaging
mode and the low gain FB mode. Figures 4.7(a) and 4.7(d) show images of the

CHAPTER 4. FORWARD BIAS LAG CORRECTION 89
Exposure Standard FB ComparisonnG/frame Signal Noise SNR Signal Noise SNR SNR % Difference
146 895 24.5 36.6 875 25.7 34.1 -6.9290 1792 34.4 52.1 1729 35.3 49.0 -5.9523 3252 46.2 70.3 3133 47.2 66.4 -5.7830 5161 58.7 87.9 4963 59.3 83.7 -4.81085 6756 67.2 100.5 6481 67.4 96.1 -4.3
Table 4.1: Signal and noise values for 0.5 pF detector modes.
phantom during irradiation for both methods. Lag frames 2 and 100 are also shown.
A large reduction in the ghost contrast is seen for the forward bias method over the
standard dual gain mode. The contrast, measured as the mean signal level difference
between the darkest and brightest part of the phantom, is 355 and 44 detector counts
for the standard mode lag frames. The contrasts for those two lag frames are reduced
to 42 and 13 detector counts (88% and 70% reduction) for the forward bias method.
Note, the 100th lag frame for the forward bias method is noisier than its standard
mode counterpart because the mode is a low gain (4 pF) imaging mode. In this mode
x-ray photons produce fewer electrons than in high gain modes, which translates into
a higher dynamic range and higher noise floor for the low gain mode. The non-forward
biased comparison mode has a lower electronic noise floor since it is a standard dual
gain mode that uses a 0.5 pF capacitor for low exposures.
4.3.3 SNR, MTF, and DQE
Table 4.1 lists the signal, noise, and SNR data for the a-Si FP in standard and FB 0.5
pF modes. The FB firmware gives both higher noise and reduced signal as compared
to the standard mode, leading to SNR reductions of up to 7% in magnitude, which
decrease with increasing exposure.
Figure 4.8 shows SNR measurements taken at several exposures for both high
and low gain modes. For each gain mode, the FB method and a standard mode are
compared. The straight line on the graph is a fit to the highest exposure data points
of a square root input exposure relationship. The line indicates what the data should
look like in a quantum, or photon, limited case. The high gain (0.5 pF) data appears

CHAPTER 4. FORWARD BIAS LAG CORRECTION 90
(a) (b) (c)
(d) (e) (f)
Figure 4.7: Projection images of a step phantom. For a standard dual gain imagingmode, images taken at (a) frame 0 (last irradiation frame) (window, level = 27000,13500 counts), (b) lag frame 2 (window, level = 400, 225 counts) with contrast =355, (c) and lag frame 100 (window, level = 50, 25 counts) with contrast = 44. Forthe forward bias mode, (d) frame 0, (e) lag frame 2 with contrast = 42, and (f) lagframe 100 with contrast = 13. The forward bias images have been scaled to matchthe dynamic range of the dual gain images and have the same window and level.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 91
Figure 4.8: SNR measurements taken at several exposures for both 0.5 pF and 4 pFFB and standard modes. The SNRs are close (within 7%) for the FB and standardmodes, but the FB mode is always less than the standard mode for low and high gain.
to be quantum limited for all collected exposures, but the low gain (4 pF) data dips
below the quantum exposure line for the lowest three collected exposures. Overall,
the SNRs are close (within 7%) for the different modes, but the standard mode always
has a higher SNR than the corresponding FB mode.
The standard firmware and FB MTFs (horizontal and vertical) for the 0.5 pF in-
tegration capacitor (Figure 4.9(a)) and the 4 pF integration capacitor (Figure 4.9(b))
are nearly identical. A small drop-off near the low frequencies seen in all of the MTFs
is due to low frequency scatter in the detector cover.
Figure 4.10 shows DQE measurements for the FB and standard modes for the
a-Si FP panel using 0.5 pF and 4 pF integration capacitors. While there is some
variability in the measured DQE for the two standard modes (and the same is true
for the two FB modes), both FB modes have smaller a DQE than both standard
modes. A downward shift in DQE for FB modes is expected because of the increase
in measured noise and a decrease in the measured signal. The DQEs for the standard
modes were both corrected for lag [46], so their larger DQEs are not due to larger
detector lag.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 92
(a) (b)
Figure 4.9: Vertical and Horizontal MTF data taken for the a-Si FP in standard andFB modes for (a) 0.5 pF modes and (b) 4 pF modes. All the MTFs match quiteclosely.
Figure 4.10: DQE measurements for the FB and standard modes for the a-Si FP panelusing 0.5 pF and 4 pF integration capacitors. While the two standard modes do notmatch each other exactly, and the same is true for the two FB modes, both standardmodes have slightly higher DQE values than both FB modes. A DQE decrease forthe FB modes is expected because of the noise increase and signal decrease of the FBmodes.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 93
(a) (b)
Figure 4.11: (a) Detector output after switching from a 4 pF forward bias mode toa 4 pF standard imaging mode. Three data sets were collected for both 10s and 60sin a forward bias mode. (b) Maximum and mean differences between the six dataacquisitions (on a per frame basis).
4.3.4 Detector Mode Switching
Figure 4.11 shows the repeatability results of switching from a forward bias mode
to a standard imaging mode on the a-Si panel using a 4 pF integration capacitor.
Figure 4.11(a) plots the detector output in counts for three experiments at 10s and
three more at 60s. Overall, the FB mode-switching is highly repeatable for the FB
times measured (Figure 4.11(a)). Figure 4.11(b) shows the average and maximum
errors between each of the experiments, with the average difference quickly falling to
below 1 A/D count after 38 frames. For the 10s and 60s data analyzed separately,
the average differences fall to below 1 A/D count even faster (after 7 and 14 frames
for the 10s and 60s data respectively). In the current setup it was not possible to
measure shorter FB times, but it is expected that the results would also be highly
repeatable. Furthermore, the output currents decay away quite quickly to values
below 100 counts within 100 frames, so no significant decrease in the detector dynamic
range is expected.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 94
4.3.5 CBCT Reconstructions
The radar artifact due to lag is quite visible in the dynamic gain CBCT reconstruc-
tions of pelvic (Figure 4.12(a)) and head (Figure 4.12(d)) phantoms. In Figure
4.12(a), the radar artifact error is 35 HU, and for Figure 4.12(d), the error is 20
HU. Previously, the same acrylic head phantom was measured to have an artifact of
24 HU in dynamic gain mode [40] at a frame rate of 15 fps. The longer frame time
at 10 fps during these acquisitions has reduced the lag effect since some of lag signal
at 15 fps is now collected in the same frame it was generated in at 10 fps. Figures
4.12(b) and 4.12(e) are similar reconstructions, but use low gain data only. Because
of the higher noise, the radar artifact is visually less noticeable, but similar in mea-
sured magnitude. The radar artifact error for Figure 4.12(b) is 36 HU, and for Figure
4.12(e) is 23 HU. Figures 4.12(c) and 4.12(f) show the reconstructions from a low
gain FB mode. The radar artifact is visibly reduced in the FB mode for the pelvic
phantom when compared to the standard modes. While the error is also reduced in
the head phantom, it is less visible simply because the uncorrected error starts off
much smaller. For Figure 4.12(c), the radar artifact error is 7 HU, corresponding
to an artifact reduction of 81%, and for Figure 4.12(f) the error is 12 HU, which
represents a 70% error reduction.
4.3.6 CBCT Comparison to Non-LTI Software Method
Figure 4.13 shows the reconstruction of the pelvic phantom data from Figure 4.12(a)
corrected with the non-LTI software correction. The radar artifact is reduced by 97%
to 1 HU, as compared to 7 HU for the hardware-based FB method in Figure 4.12(f).
Note, the noise levels in Figure 4.13 and 4.12(f) are not directly comparable since the
software correction was performed on the dynamic gain data set and not a low gain
data set.
The software method treats the a-Si photodiode and CsI scintillator of the de-
tector as a black-box. The scintillator used for the Varian 4030CB, CsI doped with
thallium, has been shown to have its own temporal response due to charge trapping
in the scintillator [53, 39]. Thus, the software calibration and correction takes into

CHAPTER 4. FORWARD BIAS LAG CORRECTION 95
(a) (b) (c)
(d) (e) (f)
Figure 4.12: 1 × 1 × 5 mm reconstructions of a pelvic phantom (30 cm × 22 cm)at 10 fps, offset detector geometry, and x-ray tube settings of 125 kVp, 80 mA, and15 ms. (a) Dynamic gain and (b) low gain (4 pF) reconstructions using a standard,non-forward bias mode. (c) Reconstruction using a forward bias, low gain mode (4pF). Window, Level = 250, 0 HU. 0.5 × 0.5 × 5 mm reconstructions of an acrylichead phantom (20 cm × 16 cm) at a tube technique of 125 kVp, 63 mA, and 20 msare shown for (d) dynamic gain, (e) low gain, and (f) low gain forward bias detectormodes.

CHAPTER 4. FORWARD BIAS LAG CORRECTION 96
Figure 4.13: Reconstruction of dynamic gain data corrected with non-LTI softwarelag correction. The radar artifact is reduced to 1 HU. Window, Level = 250, 0 HU.
account any residual scintillator effects, such as those seen in Figure 4.6. All charge
trap saturation methods will effect the photodiode only and never the scintillator re-
sponse. The residual 7 HU error in Figure 4.12(f) is most likely due to the uncorrected
scintillator response.
4.4 Discussion and Conclusions
Overall, the forward bias method shows promise in removing lag from a-Si FPs,
reducing the contrast of lag ghosts, and removing the radar artifact from CBCT
reconstructions. The contrast of lag ghosts was seen to be reduced by 70-88%, and
shading artifacts in CBCT reconstructions were reduced by 70-81%. The electronic
noise levels for the FB method in ghost reduction and low gain CBCT reconstructions
can be improved by combining the already implemented 0.5 pF and 4 pF detector
modes into a combined dual or dynamic gain imaging mode.
Some possible limitations of the FB method are evident from the experiments.
First, to achieve adequate signal level for the CBCT acquisition of the pelvic phantom,
the frame rate had to be reduced from 15 fps to 10 fps. With the addition of the
forward bias scan of each detector row and associated resets to clear excess charge,
the pulsed x-ray window width is currently limited to 18 ms at 15 fps. This is in

CHAPTER 4. FORWARD BIAS LAG CORRECTION 97
part due to the specific charge amplifiers used on the Varian 4030CB panel. Future
panels could use more powerful charge amplifiers and reduce the overall forward bias
time. Another limitation of both the FB method and the light saturation method
[15] is the inability to correct temporal changes in the system not due to the a-Si
photodiode, including the temporal response of the scintillator, which has a known
hysteresis effect [39].
Other possible limitations of the FB method are the reduced pixel sensitivity and
the increased noise. A small increase in measured noise is to be expected, since
larger dark currents are present in the panel that are removed by analog subtraction
prior to the A/D conversion. However, the cause of the pixel sensitivity decrease is
still under investigation and is the subject of future work. The SNR measurements
were repeated with other FB protocols between 6 pC/diode and 20 pC/diode, but
no measurable improvement in the FB SNR was seen. Because the FB method is
effective at removing the lag signal, perhaps some of that discarded lag signal was
collected in the standard mode and treated as pixel signal. This could be due to
charge traps with time constants of just a few milliseconds or, in other words, charge
traps that release their charge in between readout and the FB pixel reset. In a sense,
this is signal that exists at the very boundary of what one would call either true signal
or lag signal.
An exponentially decreasing trap state density for a-Si that spans 1014 - 1019
(cm−3eV −1) for energies 0.1-0.8 eV below the conduction band has been measured
[54]. Integrating the total number of traps states in that energy range gives a value
of magnitude 1018 states/cm3. The 6 pC/diode FB charge necessary to achieve lag
removal corresponds to a charge density of approximately 2 × 1015electrons/cm3.
Thus, it can be seen that a single frame of forward bias is insufficient to saturate all
of the traps in the a-Si photodiode. Thousands of frames of forward bias are needed
to fill all of the traps, which is seen in practice as a warmup time for the detector that
is greater than one hour. Once the detector is warmed up and the majority of charge
traps filled, the 6 pC of forward bias charge every detector frame fills the fraction of
traps that emptied since the previous frame.
A hybrid mode, which will also be the subject of future work, may mitigate some

CHAPTER 4. FORWARD BIAS LAG CORRECTION 98
of the possible limitations of the FB method, while hopefully maintaining its lag and
ghost reduction properties. We have shown that switching between different detector
modes on the FP is highly repeatable and only causes a very small decrease in the
potential dynamic range since the offset signals quickly and repeatedly decay to a
few hundred detector counts. The advantages of a hybrid mode over the hardware
FB mode are the following: (1) image acquisition frame rates would equal those of
a standard mode, (2) no large offset currents and thus no expected increase in dark
noise, and (3) since the mode would have a standard timing during acquisition, it is
expected that the pixel sensitivity would be equal to that of the standard firmware.
The non-LTI software correction and the forward bias method each have their own
advantages. Both methods largely reduce the radar artifact in CBCT reconstructions,
however the non-LTI software correction achieves the larger error reduction. While
not directly compared in this work, the software lag correction is also expected to
have a higher SNR than the hardware method since the hardware method has a
reduced SNR due to increased noise and decreased sensitivity. Further advantages of
the software method include no reduction in the overall frame rate and no redesign
of the detector hardware (although the forward bias method has minimal hardware
changes). An advantage of the hardware method is that it does not require an extra
lag calibration step. Furthermore, a-Si FP detectors are currently calibrated at several
points during the detectors’ lifetimes because their behavior can change with long-
term radiation exposure. It is expected that any lag calibration would also have to
be redone, thus increasing the amount of work for the system user. The forward
bias method should work regardless of this radiation exposure change, resulting in
simpler operation. All together, a hybrid mode may be able to combine all of these
advantages into a single lag correction scheme.

Chapter 5
Summary and Future Work
Chapters 2 and 3 presented software lag correction algorithms for addressing a severe
shading artifact, also known as the radar artifact, in CBCT reconstructions. This
artifact is present in reconstructions of elliptical objects or circular objects that are
offset from the center of rotation. The LTI software technique described in Chapter 2
characterizes the temporal response of the detector with an impulse response, which
is then used to deconvolve all of the detector output. Chapter 2 performed a thorough
investigation showing that the choice of parameters used for calibrating the impulse
response can have a large effect on the lag correction quality. Falling step-response
functions taken at a low exposure, 1-3.4% of detector saturation, gave the best results.
Furthermore, structured artifact remained in the shape of a blurred ring that even
the best choice of calibration parameters left behind.
Chapter 3 introduced a non-LTI lag correction algorithm. The algorithm allows
the parameterized impulse response in Chapter 2 to vary as a function of exposure
on a frame-by-frame basis. Furthermore, a physical consistency condition between
parameterized impulse responses is enforced that ensures the amount of stored charge
in the system models is consistent across different impulse responses. This non-
LTI algorithm better removes the residual error in the CBCT reconstructions and
removes the residual blurred ring artifact left by the best LTI correction in Chapter
2. Finally, because the non-LTI algorithm takes into account the exposure intensity
and edge technique dependence, there is no ambiguity on the optimal parameter set
99

CHAPTER 5. SUMMARY AND FUTURE WORK 100
for calibration.
For the software non-LTI lag correction, a rigorous investigation of the noise prop-
erties of the CBCT reconstructions after lag correction still needs to be performed.
Furthermore, it would be of interest to compare noise differences between an ROI-
based versus global detector calibration. If noise in the CBCT reconstructions is
significantly increased, the lag correction could be included as an additive step that
is filtered before addition to the uncorrected reconstruction. Alternatively, directly
filtering the correction to the projection data could be investigated.
An approximation was used for determining the lag coefficients in the non-LTI lag
correction implementation. Future work could look at the effect of not making the
approximation on more complex projection image tests and CBCT data.
The non-LTI correction in Chapter 3 focused on a single type of a-Si FP detec-
tor that uses a CsI scintillator doped with thallium. FP detectors manufactured
with other scintillators or with other types x-ray sensitive materials exist and are
currently under development. The software non-LTI model developed for character-
izing the temporal behavior of a-Si is also appropriate for CsI doped with thallium,
since it is know to have a similar charge trapping mechanism. Future work could
develop temporal corrections appropriate for other scintillator types, and investigate
the ability of the software non-LTI correction to remove lag in other materials such
as amorphous selenium, mercuric iodide, or lead iodide.
Chapter 4 presented a completely different way of removing the radar artifact by
making small changes to the detector hardware and how the existing hardware is
operated. By briefly placing the photodiode at each pixel into forward bias between
exposure frames, the charge traps responsible for detector lag can be saturated. A
larger, but uniform and predictable lag signal was created and removed by an analog
offset subtraction prior to A/D conversion. Chapter 4 investigated different forward
bias protocols and their effectiveness at removing lag in projection data. Trade-offs
between the new mode and a standard imaging mode were identified, as well as the
improvement in radar artifact removal.
The non-LTI lag correction and forward bias hardware method were also compared
on the same phantom. The non-LTI method removed more of the radar artifact, most

CHAPTER 5. SUMMARY AND FUTURE WORK 101
likely because it captures the scintillator response which the hardware method is
unable to affect. However, it may still be desirable to use the forward bias method to
maintain long-term stability of the lag correction. Another possibility is the formation
of a hybrid software and hardware detector mode that uses the forward biasing method
to remove previous panel history prior to data acquisition with a standard operating
mode. While quickly switching between different detector modes was investigated and
determined to be possible, more work on the long-term stability of the software and
hardware corrections needs to be performed to assess the value of either corrections
or a potential hybrid mode.

Appendix A
Analytical model of a-Si FP with
traps
For non-equilibrium carrier concentrations, the quasi-Fermi level determines what
fraction of the trap states inside the band gap are filled and will change as a function
of panel irradiation (carrier concentration) [55]. The overall shape of the distribution
of carriers is a Fermi function, centered at the quasi-Fermi level. For a device with a
constant photocurrent, the electron occupation function in the band gap is given by
the Fermi distribution function
fFermi(Etr) =1
1 + e(Etr−EFn)/kT. (A.1)
In Eq.(A.1), k is the Boltzmann constant, T is temperature, EFn is the quasi-Fermi
level, and Etr is the specific energy level of a trap state. Because the Fermi function
is non-linear, as is the trap state distribution in the band gap, the trap behavior may
not be linear. In other words, irradiating an FP with twice the amount of x-rays
may not result in twice the amount of trapped charge in the a-Si. Wieczorek has
developed an analytical model of a-Si trapping from basic semiconductor principles
[11]. He states that the rate of electron emission, Rα, from a trap at some energy Etr
is proportional to several factors: the trap density, Nt(Etr), the occupation function,
f(Etr), and the energy difference between Etr and the conduction band edge, Ec. The
102

APPENDIX A. ANALYTICAL MODEL OF A-SI FP WITH TRAPS 103
electron trapping rate, Rβ(Etr), is proportional to the number of free electrons, n,
and the number of available traps states. Overall, the derivative of the occupation
function can be written as normalized difference between the trapping and emission
rates:
df(Etr, t)
dt=
1
Nt
[Rβ(Etr)−Rα(Etr)] (A.2)
= afFermi(Etr)− af(Etr, t), (A.3)
where
a = ν0[e−(Ec−Etr)/kT + e−(Ec−EFn)/kT ], (A.4)
and ν0 is the attempt to escape frequency.
The solution to the differential equation in Eq.(A.3) is
f(Etr, t) = f(Etr, 0)e−at + fFermi(Etr)(1− e−at). (A.5)
We extend Wieczorek’s analytical description of trapping in a-Si to consider the
output of the a-Si FP. Let x(t) be the ideal, continuous (non-frame integrated) charge
generation function for an element of the a-Si FP (i.e., signal generated with no traps).
Let y(t) be the continuous output of the detector with the effects of charge trapping.
The amount of charge per unit time that interacts with the traps is the change in
the trap occupation function, f ′(Etr), multiplied by the trap density and integrated
over all trap energies. For example, if f ′ = 0, then there is no net change in stored
charge over that time period and the output would be equal to the generated charge
function, x(t). The output of the detector is
y(t) =
[x(t)−
∫Etr
f ′(Etr, t)Nt(Etr)dEtr
]. (A.6)
By first considering a system where traps only exist at a single energy level, Etr, and

APPENDIX A. ANALYTICAL MODEL OF A-SI FP WITH TRAPS 104
substituting Eq.(A.3) into Eq.(A.6), y(t) can be written as
y(t) = x(t)− a(fFermi(Etr)− f(Etr, t))Nt(Etr). (A.7)
Substituting for f(Etr, t) from Eq.(A.5) gives
y(t) = x(t)− ae−at(fFermi(Etr)− f(Etr, 0))Nt(Etr). (A.8)
Eq.(A.8) has the general form
y(t) = x(t) + β1e−at, (A.9)
where β1 = (f(Etr, 0)− fFermi(Etr))Nt(Etr)a. Furthermore, the ’a’ term in Eq.(A.4)
can be broken into two terms and Eq.(A.3) written as
a = athermal + aexposure. (A.10)
The first term of the right-hand side in Eq.(A.4) becomes athermal and represents
the part of the rate dependent only on the trap energy level, Etr. The second term
becomes aexposure and depends on the number of electrons in the conduction band,
which is directly proportional to the input signal, x(t). For the case with no irradiation
on the detector (i.e., x(t) = 0), Eq.(A.9) can be simplified to
y(t) = β2e−athermalt, (A.11)
where β2 = (f(Etr, 0)− fFermi(Etr))Nt(Etr)athermal.
While the x-ray off case and the general case both have an exponential form
for the detector output, y(t), the dynamics of the systems occur at different rates,
athermal versus a. In fact, whenever x(t) changes, a will change, and so will the system
dynamics that govern the rates of trap filling and emptying.
The linearity of the charge storage mechanism can also be examined by integrating

APPENDIX A. ANALYTICAL MODEL OF A-SI FP WITH TRAPS 105
the current term in Eq.(A.9) which gives
Q =
∫itrap(t)dt =
∫β1e−atdt. (A.12)
Parameters Q and itrap(t) clearly depend on x(t) because β1 and a depend on x(t)
through fFermi and n. However, the relationship between Q and x(t) is not linear.
Eq.(2.11) is the discrete analog of Eq.(A.12) and Figure 2.3 shows the experimental
non-linearity of the charge trapping with respect to the incident exposure.
Eqs.(A.7)-(A.12) are for traps at a single energy level. The arguments can easily be
extended for traps existing at multiple energy levels, since each level can be considered
its own term with corresponding values of a and fFermi. Using only a few exponential
terms has the effect of discretizing the energy spectrum.
Thus, from the equations described by Wieczorek and extended to describe the
a-Si FP output, we can see that the behavior of traps in a-Si should result in neither
a linear nor a time invariant system.

Appendix B
Wieczorek differential equation
solution
Wieczorek [11] finds that the time rate of change at a specific energy level, Etr, for
the trap occupation function f(Etr, t) is the following:
df(Etr, t)
dt= afFermi(Etr)− af(Etr, t), (B.1)
where a = ν0[e−(Ec−Etr)/kT + e−(Ec−EFn)/kT ], (B.2)
ffermi(Etr) is the Fermi function, EFn is the quasi-Fermi level, ν0 is the attempt-to-
escape frequency, and Ec is the energy level of the conduction band edge.
The solution given by Wieczorek to to Eq.(B.1) is
f(Etr, t) = f(Etr, 0)e−at + fFermi(Etr)(1− e−at). (B.3)
An unstated assumption appears to be that the equation was solved for a step-
response input. Or, more precisely, that a is not a function of t and that fFermi(Etr) =
fFermi(Etr)u(t), where u(t) is the unit step function in time, giving
df(Etr)
dt= afFermi(Etr)u(t)− af(Etr). (B.4)
106

APPENDIX B. WIECZOREK DIFFERENTIAL EQUATION SOLUTION 107
Then, solving this equation by taking the Laplace transform gives
sF (Etr, s) = aFFermi(Etr)
s− aF (Etr, s) + f(Etr, 0) (B.5)
F (Etr, s)[s+ a] = aFFermi(Etr)
s+ f(Etr, 0) (B.6)
F (Etr, s) = aFFermi(Etr)
s(s+ a)+f(Etr, 0)
s+ a. (B.7)
When the inverse Laplace transform is taken, Wieczorek’s exact solution is obtained.
If a and fFermi(Etr) are allowed to be generally time varying, then Eq.(B.1) becomes
df(Etr)
dt= a(t)fFermi(Etr, t)− a(t)f(Etr, t). (B.8)
Eq.(B.8) is not a linear constant coefficient differential equation, so it is not easily
solved with Laplace transforms or other methods. Rewriting Eq.(B.3) with time-
varying parameters gives
f(Etr, t) = f(Etr, 0)e−a(t)t + fFermi(Etr, t)(1− e−a(t)t). (B.9)
It is easily verifiable that Eq.(B.9) is not a solution to Eq.(B.8).

Bibliography
[1] B. Kevles. Naked to the bone: Medical imaging in the twentieth century. Rutgers
Univ Pr, 1997.
[2] A. C. Kak and M. Slaney. Principles of computerized tomographic imaging. IEEE
Service Center, Piscataway, NJ, 1988.
[3] J. Hsieh. Computed tomography: Principles, design, artifacts, and recent ad-
vances. SPIE–The International Society for Optical Engineering, 2003.
[4] W. Kalender and K. O. Khadivi. Computed Tomography: Fundamentals, Sys-
tem Technology, Image Quality, Applications, 2nd edition. Medical Physics,
33(8):3076–3076, 2006.
[5] B.J. Wintersperger, K. Nikolaou, F. von Ziegler, T. Johnson, C. Rist, A. Leber,
T. Flohr, A. Knez, M.F. Reiser, and C.R. Becker. Image quality, motion ar-
tifacts, and reconstruction timing of 64-slice coronary computed tomography
angiography with 0.33-second rotation speed. Investigative radiology, 41(5):436,
2006.
[6] L. A. Feldkamp, L. C. Davis, and J. W. Kress. Practical cone-beam algorithm.
Journal of the Optical Society of America A, 1(6):612–619, 1984.
[7] K. Hasegawa, K. Mochiki, H. Takahashi, S. Namatame, and Y. Satow. Imaging
system with an amorphous silicon linear sensor. Review of Scientific Instruments,
60(7):2284–2286, 1989.
108

BIBLIOGRAPHY 109
[8] L.E. Antonuk, J.B., W. Huang, D.L. McShan, E.J. Morton, J. Yorkston, M.J.
Longo, and R.A. Street. Demonstration of megavoltage and diagnostic x-
ray imaging with hydrogenated amorphous silicon arrays. Medical Physics,
19(6):1455–1466, 1992.
[9] R.E. Colbeth, S.J. Boyce, R.F., K.W. Gray, R.A. Harris, I.D. Job, I.P. Mollov,
B.Nepo, J.M. Pavkovich, N. Taie-Nobarie, E.J. Seppi, E.G. Shapiro, M.D.
Wright, C. Webb, and J.M. Yu. 40 x 30 cm flat-panel imager for angiography, ra-
diography and fluoroscopy, and cone-beam CT applications. volume 4320, pages
94–102. SPIE, 2001.
[10] R. A. Street. Hydrogenated Amorphous Silicon. Cambridge University Press,
1991.
[11] H. Wieczorek. Effects of Trapping in a-Si: H Diodes. Solid State Phenomena,
pages 957–972, 1995.
[12] L. N. McDermott, R. J. W. Louwe, J. J. Sonke, M. B. van Herk, and B. J.
Mijnheer. Dose–response and ghosting effects of an amorphous silicon electronic
portal imaging device. Medical Physics, 31:285, 2004.
[13] R. L. Weisfield, M. A. Hartney, R. Schneider, K. A., and R. Lujan. High-
performance amorphous silicon image sensor for x-ray diagnostic medical imaging
applications. volume 3659, pages 307–317. SPIE, 1999.
[14] J. H Siewerdsen and D. A. Jaffray. A ghost story: Spatio-temporal response char-
acteristics of an indirect-detection flat-panel imager. Medical Physics, 26:1624,
1999.
[15] M. Overdick, T. Solf, and H. A. Wischmann. Temporal artifacts in flat dynamic
x-ray detectors. Proceedings of SPIE, 4320:47–58, 2001.
[16] L. Spies and R. Luhta. Characterization and correction of temporal artifacts in
CT. Medical Physics, 32(7):2222–2230, 2005.

BIBLIOGRAPHY 110
[17] J. H. Siewerdsen and D. A. Jaffray. Cone-beam computed tomography with a
flat-panel imager: Effects of image lag. Medical Physics, 26:2635, 1999.
[18] N. Mail, D. J. Moseley, J. H. Siewerdsen, and D. A. Jaffray. An empirical method
for lag correction in cone-beam CT. Medical Physics, 35(11):5187–5196, 2008.
[19] E. G. Shapiro, R. E. Colbeth, E. T. Daley, I. D. Job, I. P. Mollov, T. I. Mollov,
J. M. Pavkovich, P. G. Roos, J. M. Star-Lack, and C. A. Tognina. Multidetector-
row CT with a 64-row amorphous silicon flat panel detector. Proceedings of SPIE,
6510:65103X, 2007.
[20] J. Starman, G. Virshup, S. Bandy, J. Star-Lack, and R. Fahrig. Investigation
into the cause of a new artifact in cone beam CT reconstructions on a flat panel
imager. Medical Physics, 33(6):2288–2288, 2006.
[21] J.F. Barrett and N. Keat. Artifacts in CT: Recognition and Avoidance1. Radio-
graphics, 24(6):1679, 2004.
[22] J. Hsieh, R. C. Molthen, C. A. Dawson, and R. H. Johnson. An iterative approach
to the beam hardening correction in cone beam CT. Medical Physics, 27(1):23–
29, 2000.
[23] J. H. Siewerdsen and D. A. Jaffray. Cone-beam computed tomography with
a flat-panel imager: Magnitude and effects of x-ray scatter. Medical Physics,
28(2):220–231, 2001.
[24] L. Zhu, N.R. Bennett, and R. Fahrig. Scatter Correction Method for X-Ray CT
Using Primary Modulation: Theory and Preliminary Results. Medical Imaging,
IEEE Transactions on, 25(12):1573 –1587, 2006.
[25] J.A. Rowlands and J. Yorkston. Flat panel detectors for digital radiography.
Handbook of medical imaging: physics and psychophysics, 1.
[26] W. Zhao, D. Li, A. Reznik, B. J. M. Lui, D. C. Hunt, J. A. Rowlands, Y. Ohkawa,
and K. Tanioka. Indirect flat-panel detector with avalanche gain: Fundamental

BIBLIOGRAPHY 111
feasibility investigation for SHARP-AMFPI (scintillator HARP active matrix
flat panel imager). Medical Physics, 32(9):2954–2966, 2005.
[27] D. Li, W. Zhao, M. Nanba, and N. Egami. Scintillator avalanche photoconductor
with high resolution emitter readout for low dose x-ray imaging: Lag. Medical
Physics, 36(9):4047–4058, 2009.
[28] W. Zhao, G. DeCrescenzo, S. O. Kasap, and J. A. Rowlands. Ghosting caused by
bulk charge trapping in direct conversion flat-panel detectors using amorphous
selenium. Medical Physics, 32(2):488–500, 2005.
[29] G. Zentai, L. D. Partain, R. Pavlyuchkova, C. Proano, G. F. Virshup,
L. Melekhov, A. Zuck, B. N. Breen, O. Dagan, A. Vilensky, M. Schieber,
H. Gilboa, P. Bennet, K. S. Shah, Y. N. Dmitriyev, J. A. Thomas, M. J. Yaffe,
and D. M. Hunter. Mercuric iodide and lead iodide x-ray detectors for radio-
graphic and fluoroscopic medical imaging. volume 5030, pages 77–91. SPIE,
2003.
[30] G. Zentai, L. D. Partain, R. Pavlyuchkova, C. Proano, G. F. Virshup, B. N.
Breen, A. Zuck, B. Reisman, A. Taieb, and M. M. Schieber. Large area mercuric
iodide thick film x-ray detectors for fluoroscopic (on-line) imaging. volume 4702,
pages 446–453. SPIE, 2002.
[31] K. Yang, A. L. C. Kwan, and J. M. Boone. Computer modeling of the spa-
tial resolution properties of a dedicated breast CT system. Medical Physics,
34(6):2059–2069, 2007.
[32] J. Hsieh, O. E. Gurmen, and K. F. King. Recursive correction algorithm for
detector decay characteristics in CT. Proceedings of SPIE, 3977:298–305, 2000.
[33] S. N. Friedman and I. A. Cunningham. A moving slanted-edge method to mea-
sure the temporal modulation transfer function of fluoroscopic systems. Medical
Physics, 35(6):2473–2484, 2008.

BIBLIOGRAPHY 112
[34] S. N. Friedman and I. A. Cunningham. A small-signal approach to temporal
modulation transfer functions with exposure-rate dependence and its application
to fluoroscopic detective quantum efficiency. Medical Physics, 36(8):3775–3785,
2009.
[35] J. Hsieh, O.E. Gurmen, and K.F. King. Investigation of a solid-state detector
for advanced computed tomography. Medical Imaging, IEEE Transactions on,
19(9):930 –940, sep. 2000.
[36] C. T. Kelley. Iterative methods for optimization. Society for Industrial Mathe-
matics, 1999.
[37] E. Matsinos. Current status of the CBCT project at Varian Medical Systems.
volume 5745, pages 340–351. SPIE, 2005.
[38] H.-A. Wischmann, H. A. Luijendijk, H. J. Meulenbrugge, M. Overdick,
R. Schmidt, and K. Kiani. Correction of amplifier nonlinearity, offset, gain,
temporal artifacts, and defects for flat-panel digital imaging devices. volume
4682, pages 427–437. SPIE, 2002.
[39] V. V. Nagarkar, V. B. Gaysinskiy, E. E. Ovechkina, S. R. Miller, C. Brecher,
A. Lempicki, and R. H. Bartram. Scintillation properties and applications of
reduced-afterglow co-doped CsI:Tl. volume 6707, page 67070D. SPIE, 2007.
[40] J. Starman, J. Star-Lack, G. Virshup, E. Shapiro, and R. Fahrig. Investigation
into the optimal linear time-invariant lag correction for an a-si flat panel x-ray
detector. Medical Physics, Submitted, 2010.
[41] J. Star-Lack, J. Starman, P. Munro, A. Jeung, J. Richters, H. Mostafavi, and
J. Pavkovich. SU-FF-I-04: A Fast Variable-Intensity Ring Suppression Algo-
rithm. Medical Physics, 33:1997, 2006.
[42] V. V. Nagarkar, C. Brecher, E. E. Ovechkina, V. Gaysinskiy, S. R. Miller,
S. Thacker, A. Lempicki, and R. H. Bartram. Scintillation Properties of CsI:

BIBLIOGRAPHY 113
Tl Crystals Codoped With Sm2+. Nuclear Science, IEEE Transactions on,
55(3):1270–1274, 2008.
[43] C. A. Tognina, I. Mollov, J. M. Yu, C. Webb, P. G. Roos, M. Batts, D. Trinh,
R. Fong, N. Taie-Nobraie, B. Nepo, I. D. Job, K. Gray, S. Boyce, and R. E.
Colbeth. Design and performance of a new a-Si flat-panel imager for use in
cardiovascular and mobile C-arm imaging systems. volume 5368, pages 648–656.
SPIE, 2004.
[44] P. R. Granfors, R. A., G. E. Possin, B. W. Giambattista, Z. S. Huang, J. Liu,
and B. Ma. Performance of a 41 x 41 cm2 amorphous silicon flat panel x-
ray detector designed for angiographic and R&F imaging applications. Medical
Physics, 30(10):2715–2726, 2003.
[45] Physical aspects of detector design. Radiation Measurements, 33(5).
[46] P. R. Granfors and R. Aufrichtig. DQE(f) of an amorphous-silicon flat-panel
x-ray detector: detector parameter influences and measurement methodology.
volume 3977, pages 2–13. SPIE, 2000.
[47] S. N. Friedman and I. A. Cunningham. A spatio-temporal detective quantum effi-
ciency and its application to fluoroscopic systems. Medical Physics, 37(11):6061–
6069, 2010.
[48] G. Virshup, R. Suri, and J. Star-Lack. Scatter characterization in cone-beam CT
systems with offset flat panel imagers. Medical Physics, 33(6):2288–2288, 2006.
[49] I. Mollov, C. Tognina, and R. Colbeth. Photodiode forward bias to reduce tem-
poral effects in a-Si-based flat panel detectors. Proceedings of SPIE, 6913:69133S,
2008.
[50] J. Starman, C. Tognina, G. Virshup, J. Star-lack, I. Mollov, and R. Fahrig.
Parameter investigation and first results from a digital flat panel detector with
forward bias capability. Proceedings of SPIE, 6913:69130L, 2008.

BIBLIOGRAPHY 114
[51] P. G. Roos, R. E. Colbeth, I. Mollov, P. Munro, J. Pavkovich, E. J. Seppi,
E. G. Shapiro, C. A. Tognina, G.F. Virshup, J. M. Yu, G. Zentai, W. Kaissl,
E. Matsinos, J. Richters, and H. Riem. Multiple-gain-ranging readout method
to extend the dynamic range of amorphous silicon flat-panel imagers. volume
5368, pages 139–149. SPIE, 2004.
[52] International Electrotechnical Commission Report No. 62220-1-3, 2008.
[53] H. Wieczorek and M. Overdick. Afterglow and hysteresis in CsI: Tl. In Proceed-
ings of the Fifth International Conference on Inorganic Scintillators and their
Applications (SCINT99), Moscow, pages 385–390, 2000.
[54] L. D. Partain. Space-charge-limited current diode model for amorphous silicon
solar cells and their degradation. Journal of Applied Physics, 61(12):5458–5466,
1987.
[55] R. F. Pierret. Semiconductor device fundamentals. Addison-Wesley Reading,
Mass, 1996.