Embed Size (px)
DESCRIPTION
mucha informacion sobre control
Citation preview

PRÁCTICA No. 6
DISEÑO DE CONTROLADORES EN EL ESPACIO DE ESTADO POR
REALIMENTACIÓN DE VARIABLES DE ESTADO
1. OBJETIVO
Diseñar controladores por realimentación de estados Diseño de observadores de estado Emplear el Matlab como ayuda al diseño
2. FUNDAMENTO TEORICO Conocer la teoría de variables de estado, realimentación
y observadores de estado Conocer los comandos del Matlab relacionados a
matrices, matrices de realimentación, etc.
3. TRABAJO EXPERIMENTAL
3.1. Hacer una lista de comandos del Matlab utilizados para realimentación de estados y observadores de estado. Poner un ejemplo para cada comando
tf2ss(n,d): Este comando nos permite llevar un sistema de una función de transferencia expresada como (n,d) al espacio de estados
ss2tf(A,B,C,D): Nos permite llevar un sistema del espacio de estados a una función de transferencia

canon(A,B,C,D,’companion’): Nos describe un sistema en el espacio de estados en su forma canónica controlable
canon(A,B,C,D,’modal’): Nos describe un sistema en el espacio de estados en su forma canónica diagonal
ctrb(A,B): Nos muestra la matriz de controlabilidad a partir de las ecuaciones dadas en el espacio de estado

obsv(A,C) ; nos muestra la matriz de observabilidad a partir de las ecuaciones en el espacio de estado
rank(M): Nos muestra el rango de la matriz M
poly (A) ; Nos muestra la ecuación característica de un sistema a partir de la ecuación del espacio de estados
place(A,B,j): Calcula la matriz o vector K de tal forma que los auto valores de A-B*K (matriz de transición de estados del sistema en bucle cerrado) sean los especificados en el valor P

acker(A,B,j): Calcula la matriz o vector de ganancias K tal que el sistema de una sola entrada x=Ax+Bu, con una ley de control u=-Kx, tenga los polos en bucle cerrado en los valores especificados en el vector P. es una implementación de la fórmula de Ackerman.
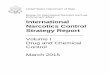
3.2. Dadas las ecuaciones
de estado correspondientes a una articulación de un brazo robótico.Grafique la respuesta temporal ante una entrada escalón. Comente sobre la respuesta, y diseñe un control por realimentación de estado tal que el sobrepaso máximo sea menor a 25% y el tiempo de establecimiento menor a 10 seg.
j%REALIMENTACION EN EL ESPACIO DE ESTADOS clear allA=[0 0 1 0; 0 0 0 1; 0 766 -53 0;0 -1040 53 0];B=[0 0 99 -99]';C=[1 1 0 0];D=[0];Mc=ctrb(A,B)Rango=rank(Mc)mp=25; ts=10;e=abs(log(mp/100))/sqrt(pi^2+(log(mp/100))^2);wn=4/(ts*e);
u1=-e*wn + i*wn*sqrt(1-e^2); u2=-e*wn - i*wn*sqrt(1-e^2);
u3=-10;u4=-10;

J=[u1 u2 u3 u4];K=acker(A,B,J)A1=A-B*KB1=[1 0 0 0]'C1=CD1=D[n1,d1]=ss2tf(A1,B1,C1,D1)step(n1,d1),grid
Step Response
Time (sec)
Am
plitu
de
0 2 4 6 8 10 12 140
0.5
1
1.5
System: sysPeak amplitude: 1.43Overshoot (%): 40.9At time (sec): 2.44 System: sys
Settling Time (sec): 10.1
3.3. La ecuación de estado dada:
Corresponde a un sistema bola–viga, halle la respuesta escalón al sistema y luego diseñe un compensador por realimentación de estado tal que el sobrepaso máximo sea entre 20% y 25% y tiempo de asentamiento menor a 12 seg.
%REALIMENTACION EN EL ESPACIO DE ESTADOSclear allclcA=[0 1.7 0 0; 0 0 -0.22 0; 0 0 0 1.5; 0 0 0 -48.41];B=[0 0 0 -2400]';C=[1 0 0 0];D=[0];

Mc=ctrb(A,B)Rango=rank(Mc)mp=25 ts=10 e=abs(log(mp/100))/sqrt(pi^2+(log(mp/100))^2);wn=4/(ts*e);u1=-e*wn + i*wn*sqrt(1-e^2);u2=-e*wn - i*wn*sqrt(1-e^2);u3=-10;u4=-10;J=[u1 u2 u3 u4];K=acker(A,B,J)A1=A-B*K;B1=[1 0 0 0]';C1=C;D1=D;[n1,d1]=ss2tf(A1,B1,C1,D1);step(n1,d1),grid
Step Response
Time (sec)
Am
plitu
de
0 5 10 150
0.5
1
1.5
System: sysPeak amplitude: 1.43Overshoot (%): 41At time (sec): 2.38 System: sys
Settling Time (sec): 10.1
3.4. Suponiendo que no son accesibles las variables de estado, diseñar un observador de observador de estado para cada uno de los sistemas propuestos y grafique las variables de estado y las variables estimadas, compare.%OBSERVADORES DE ESTADOclear allclcA=[0 0 1 0; 0 0 0 1; 0 766 -53 0;0 -1040 53 0];B=[0 0 99 -99]';C=[1 1 0 0];D=[0];Mo=obsv(A,C)

Rango=rank(Mo)disp('El sistema si es observable')mp=25 %input('Mp=');ts=10 %input('ts=');e=abs(log(mp/100))/sqrt(pi^2+(log(mp/100))^2);wn=4/(ts*e);x=-e*wn;y=wn*sqrt(1-e^2);u1=x+y*i;u2=x-y*i;u3=-10;u4=-10;J=[u1 u2 u3 u4];%matrices dualesAD=A';BD=C';CD=B';K=acker(AD,BD,J)A1=A-B*K;B1=[1 0 0 0]';C1=C;D1=D;[n1,d1]=ss2tf(A1,B1,C1,D1);step(n1,d1),grid
K = 1.0e+003 * -0.1142 0.0820 3.8616 -3.0780
%OBSERVADORES DE ESTADO
3.5. Construir un VI donde se muestre la matriz de realimentación de estado y en caso necesario la matriz para la observación de estados
4. CONCLUSIONES Y RECOMENDACIONES Para realizar las diversas compensaciones tienen que
cumplir requisitos como son que deben de ser controlables y/o observables
Con ayuda del matlab la resolución de los diversos problemas se harán más sencillos.
Podemos observar que es más matemático.
5. BIBLIOGRAFIA KUO Benjamín, Sistemas de Control Automático, Séptima
Edición. OGATA Katsuhiko, Ingeniería de Control Moderna,
Tercera Edición.

NATIONAL INSTRUMENTS, LabVIEW Fundamentalas, Agosto 2007.
NATIONAL INSTRUMENTS, Getting Started with LabVIEW, Agosto 2007.
NATIONAL INSTRUMENTS, Control Design Toolkit User Manual, Agosto
MATLAB, User Manual Control System Toolbox 2010 http://es.wikipedia.org/wiki/Lugar_de_ra%C3%ADces https://www.u-cursos.cl/ingenieria/2007/2/ME55A/1/
material_docente/bajar?id_material=152663 http://ingenieria.udea.edu.co/~evelilla/ARCHIVOS/
LGR.pdf http://www.isa.uma.es/C11/Ingenier%C3%ADa%20de
%20Sistemas/Document%20Library/Tema3.pdf