Embed Size (px)
Citation preview

L1-L2 1/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Minimizing the Difference of L1 and L2 Normswith Applications
Yifei Lou
Department of Mathematical SciencesUniversity of Texas Dallas
May 31, 2017
Partially supported by NSF DMS 1522786

L1-L2 2/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Outline
1 A nonconvex approach: L1-L2
2 Minimization algorithms
3 Some applications
4 Conclusions

L1-L2 3/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Background
We aim to find a sparse vector from an under-determinedlinear system,
x̂0 = argminx‖x‖0 s.t. Ax = b.
This is NP-hard.
A popular approach is to replace L0 by L1, i.e.,
x̂1 = argminx‖x‖1 s.t. Ax = b.
The equivalence between L0 and L1 norms holds when thematrix A satisfies the restricted isometry property (RIP).
Candes-Romberg-Tao (2006)

L1-L2 3/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Background
We aim to find a sparse vector from an under-determinedlinear system,
x̂0 = argminx‖x‖0 s.t. Ax = b.
This is NP-hard.
A popular approach is to replace L0 by L1, i.e.,
x̂1 = argminx‖x‖1 s.t. Ax = b.
The equivalence between L0 and L1 norms holds when thematrix A satisfies the restricted isometry property (RIP).
Candes-Romberg-Tao (2006)

L1-L2 3/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Background
We aim to find a sparse vector from an under-determinedlinear system,
x̂0 = argminx‖x‖0 s.t. Ax = b.
This is NP-hard.
A popular approach is to replace L0 by L1, i.e.,
x̂1 = argminx‖x‖1 s.t. Ax = b.
The equivalence between L0 and L1 norms holds when thematrix A satisfies the restricted isometry property (RIP).
Candes-Romberg-Tao (2006)

L1-L2 4/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Coherence
Another sparse recovery guarantee is based on coherence.
‖x‖0 612
(1 + µ(A)−1),
where coherence of a matrix A = [a1, · · · , aN ] is defined as
µ(A) = maxi 6=j
|aTi aj|
‖ai‖‖aj‖.
Two extreme cases are
• µ ∼ 0⇒ incoherent matrix• µ ∼ 1⇒ coherent matrix
What if the matrix is coherent?

L1-L2 4/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Coherence
Another sparse recovery guarantee is based on coherence.
‖x‖0 612
(1 + µ(A)−1),
where coherence of a matrix A = [a1, · · · , aN ] is defined as
µ(A) = maxi 6=j
|aTi aj|
‖ai‖‖aj‖.
Two extreme cases are• µ ∼ 0⇒ incoherent matrix• µ ∼ 1⇒ coherent matrix
What if the matrix is coherent?

L1-L2 4/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Coherence
Another sparse recovery guarantee is based on coherence.
‖x‖0 612
(1 + µ(A)−1),
where coherence of a matrix A = [a1, · · · , aN ] is defined as
µ(A) = maxi 6=j
|aTi aj|
‖ai‖‖aj‖.
Two extreme cases are• µ ∼ 0⇒ incoherent matrix• µ ∼ 1⇒ coherent matrix
What if the matrix is coherent?

L1-L2 5/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
L1-L2 works well for coherent matrix
We consider an over-sampled DCT matrix with each columnas
aj =1√N
cos(2πjw
F) , j = 1, · · · ,N
where w is a random vector of length M.
The larger F is, the more coherent the matrix. Take a100× 1000 matrix for an example:
F coherence1 0.3981
10 0.998120 0.9999
P. Yin, Y. Lou, Q. He and J. Xin, SIAM Sci. Comput., 2015
Y. Lou, P. Yin, Q. He and J. Xin, J. Sci. Comput., 2015

L1-L2 6/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
10 15 20 25 30 350
10
20
30
40
50
60
70
80
90
100
Sparsity
Suc
cess
rat
e
L1−L
2
L1/2
L1
Figure: Success rates of incoherent matrices, F = 1.

L1-L2 6/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
5 10 15 20 25 30 350
10
20
30
40
50
60
70
80
90
100
Sparsity
Suc
cess
rat
e
L1−L
2
L1/2
L1
Figure: Success rates of coherent matrices, F = 20.

L1-L2 7/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Comparing metrics
L2 L1 L1 − L2
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
Figure: Level lines of three metrics: L2 (strictly convex), L1(convex), and L1 − L2 (nonconvex).

L1-L2 8/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Comparing nonconvex metrics
Consider a matrix A of size 17× 19 and V ∈ R19×2 be thebasis of the null space of A, i.e. AV = 0.
So the feasible set is a two-dimensional affine space, i.e.
{x : Ax = Axg} = {x = xg + V[
st
]: s, t ∈ R}.
Visualize objective functions L0, L1/2, and L1-L2 over 2Dst-plane.

L1-L2 9/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
L0: incoherent (left) and coherent (right)

L1-L210/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
L1/2: incoherent (left) and coherent (right)

L1-L211/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
L1-L2: incoherent (left) and coherent (right)

L1-L212/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Model failure v.s. algorithm failureL1 L1/2
5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Occ
urre
nce
rate
Lasso
F (x̄) ≥ F (x)(model failure)F (x̄) < F (x)(algorithmic failure)
5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Occ
urre
nce
rate
IRucLq-v
F (x̄) ≥ F (x)(model failure)F (x̄) < F (x)(algorithmic failure)
L1-L2 truncated L1-L2
5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Occ
urre
nce
rate
l1−2
F (x̄) ≥ F (x)(model failure)F (x̄) < F (x)(algorithmic failure)
5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Occ
urre
nce
rate
lt,1−2
F (x̄) ≥ F (x)(model failure)F (x̄) < F (x)(algorithmic failure)

L1-L213/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Truncated L1-L2
‖x‖t,1−2 :=∑
i/∈Γx,t|xi| −
√∑i/∈Γx,t
x2i ,
where Γx,t ⊆ {1, . . . ,N} with cardinality t is a set containingthe indices of the entries of x with the t largest magnitudes.
10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Suc
cess
rat
e
Lassol1−2IRucLq-vISDlt,1−2
5 10 15 20 25 30 350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sparsity
Suc
cess
rat
e
Lassol1−2IRucLq-vISDlt,1−2
T. Ma, Y. Lou, and T. Huang, SIAM Imaging Sci., to appear 2017

L1-L214/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Advantages of L1-L2
• Lipschitz continuous
• Correct L1’s biasedness by subtracting something withsmooth gradient a.e.
• Exact recovery of 1-sparse vectors (truncated versionyields exact recovery of t-sparse vectors)
• Good for coherent compressive sensing

L1-L214/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Advantages of L1-L2
• Lipschitz continuous
• Correct L1’s biasedness by subtracting something withsmooth gradient a.e.
• Exact recovery of 1-sparse vectors (truncated versionyields exact recovery of t-sparse vectors)
• Good for coherent compressive sensing

L1-L214/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Advantages of L1-L2
• Lipschitz continuous
• Correct L1’s biasedness by subtracting something withsmooth gradient a.e.
• Exact recovery of 1-sparse vectors (truncated versionyields exact recovery of t-sparse vectors)
• Good for coherent compressive sensing

L1-L214/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Advantages of L1-L2
• Lipschitz continuous
• Correct L1’s biasedness by subtracting something withsmooth gradient a.e.
• Exact recovery of 1-sparse vectors (truncated versionyields exact recovery of t-sparse vectors)
• Good for coherent compressive sensing

L1-L215/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Outline
1 A nonconvex approach: L1-L2
2 Minimization algorithms
3 Some applications
4 Conclusions

L1-L216/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Algorithms
We consider an unconstrained L1 − L2 formulation, i.e.,
minx∈RN
F(x) =12‖A x − b‖2
2 + λ(‖x‖1 − ‖x‖2).
Our first attempt is using the difference of convex algorithm(DCA) by composing decompose F(x) = G(x)− H(x) into{
G(x) = 12‖A x − b‖2
2 + λ‖x‖1H(x) = λ‖x‖2.
An iterative scheme is,
xn+1 = arg minx∈RN
12‖A x − b‖2
2 + λ‖x‖1 − 〈x,λxn
‖xn‖2〉.

L1-L217/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
We then derive a proximal operator for L1-αL2 (α ≥ 0)
x∗ = arg minxλ (‖x‖1 − α‖x‖2) +
12‖x − y‖2
2,
which has a closed-form solution:
1 If ‖y‖∞ > λ, then x∗ = z(‖z‖2 + αλ)/‖z‖2, wherez = shrink(y, λ);
2 if ‖y‖∞ = λ, then ‖x∗‖2 = αλ, x∗i = 0 for |yi| < λ;
3 If (1− α)λ < ‖y‖∞ < λ, then x∗ is 1-sparse vectorsatisfying x∗i = 0 for |yi| < ‖y‖∞;
4 If ‖y‖∞ ≤ (1− α)λ, then x∗ = 0.
Y. Lou and M. Yan, J. Sci Comput., to appear 2017

L1-L218/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Remarks
• Most L1 solves are applicable for L1-αL2 by replacingsoft shrinkage with this proximal operator.
• The algorithm of combining ADMM and this operator(nonconvex-ADMM), is much faster than the DCA.
• Both nonconvex-ADMM and DCA converge tostationary points.
• However, nonconvex-ADMM does not give betterperformance than DCA for coherent CS.

L1-L218/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Remarks
• Most L1 solves are applicable for L1-αL2 by replacingsoft shrinkage with this proximal operator.
• The algorithm of combining ADMM and this operator(nonconvex-ADMM), is much faster than the DCA.
• Both nonconvex-ADMM and DCA converge tostationary points.
• However, nonconvex-ADMM does not give betterperformance than DCA for coherent CS.

L1-L218/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Remarks
• Most L1 solves are applicable for L1-αL2 by replacingsoft shrinkage with this proximal operator.
• The algorithm of combining ADMM and this operator(nonconvex-ADMM), is much faster than the DCA.
• Both nonconvex-ADMM and DCA converge tostationary points.
• However, nonconvex-ADMM does not give betterperformance than DCA for coherent CS.

L1-L218/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Remarks
• Most L1 solves are applicable for L1-αL2 by replacingsoft shrinkage with this proximal operator.
• The algorithm of combining ADMM and this operator(nonconvex-ADMM), is much faster than the DCA.
• Both nonconvex-ADMM and DCA converge tostationary points.
• However, nonconvex-ADMM does not give betterperformance than DCA for coherent CS.

L1-L219/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
15 20 25 30 35
Sparsity
0
10
20
30
40
50
60
70
80
90
100 L1 (ADMM)
L1-L
2 (DCA)
L1-L
2 (ADMM)
L1-L
2 (weighted)
Figure: Success rates of coherent matrices, F=20.

L1-L220/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
15 20 25 30 35
Sparsity
0
10
20
30
40
50
60
70
80
90
100 L1 (ADMM)
L1-L
2 (DCA)
L1-L
2 (ADMM)
L1-L
2 (weighted)
Figure: Success rates of incoherent matrices, F=5.

L1-L221/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
• DCA is more stable than nonconvex-ADMM, as eachDCA subproblem is convex.
• Since it is convex at α = 0, we consider a continuationscheme of gradually increasing α from 0 to 1, referredto as “weighted”.
• How to update the weight α?
• For incoherence matrices, a linear increase for α with alarge slope until reaching one;
• For coherent cases, a sigmoid function to update α,which may or may not reach one.

L1-L221/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
• DCA is more stable than nonconvex-ADMM, as eachDCA subproblem is convex.
• Since it is convex at α = 0, we consider a continuationscheme of gradually increasing α from 0 to 1, referredto as “weighted”.
• How to update the weight α?
• For incoherence matrices, a linear increase for α with alarge slope until reaching one;
• For coherent cases, a sigmoid function to update α,which may or may not reach one.

L1-L221/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
• DCA is more stable than nonconvex-ADMM, as eachDCA subproblem is convex.
• Since it is convex at α = 0, we consider a continuationscheme of gradually increasing α from 0 to 1, referredto as “weighted”.
• How to update the weight α?
• For incoherence matrices, a linear increase for α with alarge slope until reaching one;
• For coherent cases, a sigmoid function to update α,which may or may not reach one.

L1-L221/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
• DCA is more stable than nonconvex-ADMM, as eachDCA subproblem is convex.
• Since it is convex at α = 0, we consider a continuationscheme of gradually increasing α from 0 to 1, referredto as “weighted”.
• How to update the weight α?
• For incoherence matrices, a linear increase for α with alarge slope until reaching one;
• For coherent cases, a sigmoid function to update α,which may or may not reach one.

L1-L221/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
• DCA is more stable than nonconvex-ADMM, as eachDCA subproblem is convex.
• Since it is convex at α = 0, we consider a continuationscheme of gradually increasing α from 0 to 1, referredto as “weighted”.
• How to update the weight α?
• For incoherence matrices, a linear increase for α with alarge slope until reaching one;
• For coherent cases, a sigmoid function to update α,which may or may not reach one.

L1-L222/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
0 1000 2000 3000 4000 5000 6000 7000 8000
Iteration number
0
0.2
0.4
0.6
0.8
1
F=5F=20
Figure: Different ways of updating α for incoherent (blue) orcoherent (red) matrices.

L1-L223/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
15 20 25 30 35
Sparsity
0
10
20
30
40
50
60
70
80
90
100 L1 (ADMM)
L1-L
2 (DCA)
L1-L
2 (ADMM)
L1-L
2 (weighted)
Figure: Success rates of coherent matrices, F=20.

L1-L224/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Outline
1 A nonconvex approach: L1-L2
2 Minimization algorithms
3 Some applications
4 Conclusions

L1-L225/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Super-resolution
The super-resolution problem discussed here is different toimage zooming or magnification, but aiming to recover areal-valued signal from its low-frequency measurements.
A mathematical model is expressed as
bk =1√N
N−1∑t=0
xte−i2πkt/N , |k| ≤ fc,
where x ∈ RN is a vector of interest, and b ∈ Cn is the givenlow frequency information with n = 2fc + 1 (n < N).

L1-L226/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Point source with minimum separation
Theorem by Candés and Fernandez-Granda 2012Let T = {tj} be the support of x. If the minimum distanceobeys
4(T) ≥ 2 · N/fc,
then x is the unique solution to L1 minimization. If x isreal-valued, then the minimum gap can be lowered to1.26 · N/fc.

L1-L227/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
0.75 0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25
0
10
20
30
40
50
60
70
80
90
100
MSF
Constrained L1 (SDP)
Constrained L1−2
Unconstrained L1−2
Unconstrained CL1
Unconstrained L1/2
Y. Lou, P. Yin and J. Xin, J. Sci. Comput., 2016

L1-L228/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Low-rank recovery
Replacing nuclear norm with truncated L1-L2 of the singularvalues
10 14 18 22 26 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Rank
Suc
cess
rat
e
FPCFPCALMaFitIRucLq-M
lt,1−2
T. Ma, Y. Lou, and T. Huang, SIAM Imaging Sci., to appear 2017

L1-L229/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
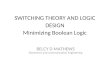
Image processing
We consider
J(u) = ‖Dxu‖1 + ‖Dyu‖1 − α‖√|Dxu|2 + |Dyu|2‖1 ,
which turns out to be a weighted difference of anisotropicand isotropic TV:
J(u) = Jani − αJiso,
where α ∈ [0, 1] is a weighting parameter.
Gradient vectors (ux, uy) are mostly 1-sparse, and α takesinto account the occurrence of non-sparse gradient vectors.
Y. Lou, T. Zeng, S. Osher and J. Xin, SIAM J. Imaging Sci., 2015

L1-L230/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
MRI reconstruction
original k-space data sampling mask
FBP, ER=0.99 L1,ER = 0.1 L1 − L2,ER ∼ 10−8

L1-L231/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
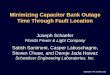
Block-matching
Block−matching Grouping
Reference patch
Similar patches
Vectorizationw × w → w2 × 1
w2 × n
Figure: Illustration of constructing groups by block-matching(BM). For each w× w reference patch from an n1 × n2 image, weuse block-matching to search its n− 1 best matched patches interms of Euclidean distance, and then vectorize and combinethose patches to form a group of size w2 × n.

L1-L232/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Block-matching inpaintingBarbara 85% missing
BM3D SAIST oursPSNR=26.71,SSIM=0.8419 PSNR=29.53,SSIM=0.9147 PSNR=30.65,SSIM=0.9264
T. Ma, Y. Lou, T. Huang and X. Zhao, ICIP, to appear 2017

L1-L233/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Logistic regression
Given a collection of training data xi ∈ Rn with a labelyi ∈ {±1} for i = 1, 2, · · · ,m, we aim to find a hyperplanedefined by {x : wT x + v = 0} by minimizing the followingobjective function,
minw∈Rn,v∈R
F(w, v) + lavg(w, v)
where the second term is called averaged loss defined as
lavg(w, v) =1m
m∑i=1
ln(1 + exp(−yi(wT xi + v))
).

L1-L234/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Preliminary results
Real data of patients with inflammatory bowel disease (IBD) foryears 2011 and 2012. For each year, the data set contains 18types of medical information, such as prescriptions, number ofoffice visits, and whether the patient was hospitalized. We usedthe 2011 data to train our classifier and the 2012 data to validateits performance.
L1 L2 L1-L2
Recall 0.6494 0.6585 0.6829Precision 0.0883 0.0882 0.0912F-Score 0.0573 0.0581 0.0622AUC 0.7342 0.7321 0.7491
UCLA REU project in 2015, followed by Q. Jin and Y. Lou for a journal submission

L1-L235/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Conclusions
1 L1-L2 is always better than L1, and is better than Lp forhighly coherent matrices.
2 Proximal operator can accelerate the minimization, butit tends to obtain a suboptimal solution.
3 In general, nonconvex methods have better empiricalperformance compared to convex ones, but lack ofprovable grounds.

L1-L235/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Conclusions
1 L1-L2 is always better than L1, and is better than Lp forhighly coherent matrices.
2 Proximal operator can accelerate the minimization, butit tends to obtain a suboptimal solution.
3 In general, nonconvex methods have better empiricalperformance compared to convex ones, but lack ofprovable grounds.

L1-L235/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Conclusions
1 L1-L2 is always better than L1, and is better than Lp forhighly coherent matrices.
2 Proximal operator can accelerate the minimization, butit tends to obtain a suboptimal solution.
3 In general, nonconvex methods have better empiricalperformance compared to convex ones, but lack ofprovable grounds.

L1-L236/36
Yifei Lou
L1-L2 model
Algorithms
Applications
Conclusions
Thank you!




![Carbon Nanotube Composites for Wideband Millimeter … · setup is modeled with CST-Microwave Studio (CST MWS) [26]. By minimizing the difference between the simulated and ... hours](https://img.pdfslide.us/doc/110x75/5ae762197f8b9ae1578ef227/carbon-nanotube-composites-for-wideband-millimeter-is-modeled-with-cst-microwave.jpg)