Embed Size (px)
Citation preview
ksjp
, 7/0
1
MEMS Design & Fab
Overview
• Integrating multiple steps of a single actuator
• Simple beam theory
• Mechanical Digital to Analog Converter
ksjp
, 7/0
1
MEMS Design & Fab
Limits to electrostatics• Residual stress (limits size)
• Pull-in• Gap-closing• Comb drive• Tooth (for comb and gap-closing)
• Thermal noise
ksjp
, 7/0
1
MEMS Design & Fab
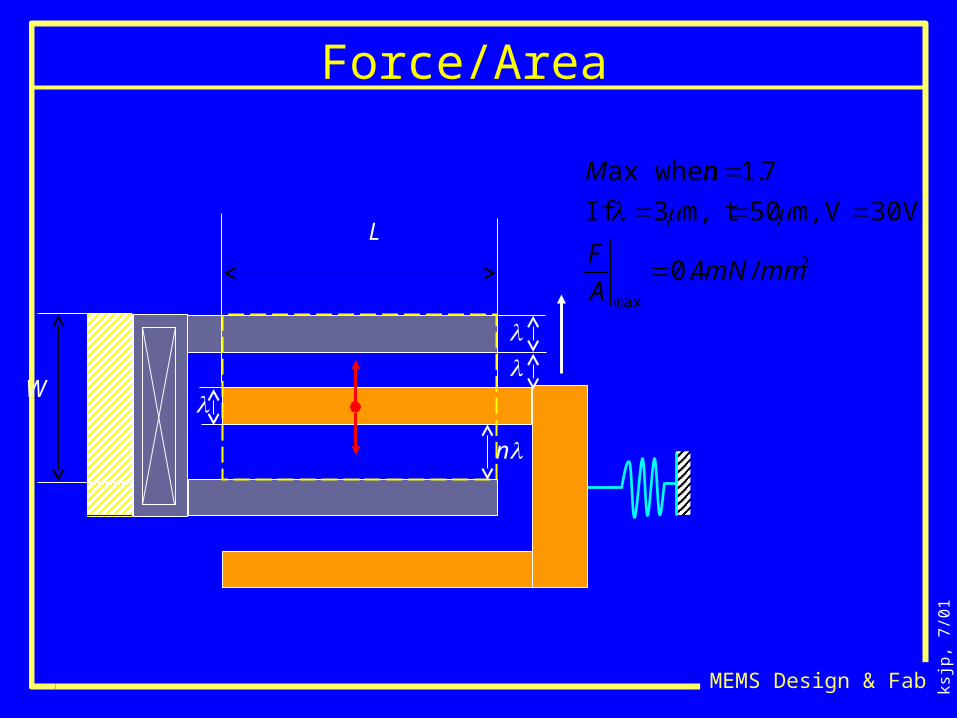
Force/Area
n
L
W
2
max
/4.0
30VV m,50 tm,3 If
7.1ax when
mmmNA
F
nM
ksjp
, 7/0
1
MEMS Design & Fab
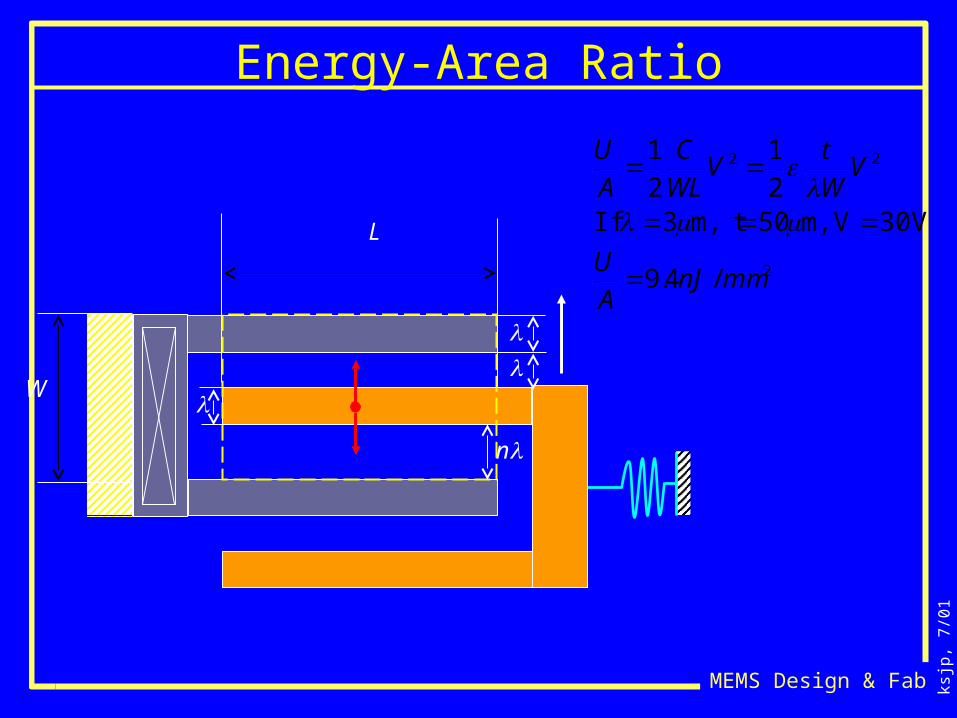
Energy-Area Ratio
n
L
W
2
22
/4.9
30VV m,50 tm,3 If2
1
2
1
mmnJA
U
VW
tV
WL
C
A
U
ksjp
, 7/0
1
MEMS Design & Fab
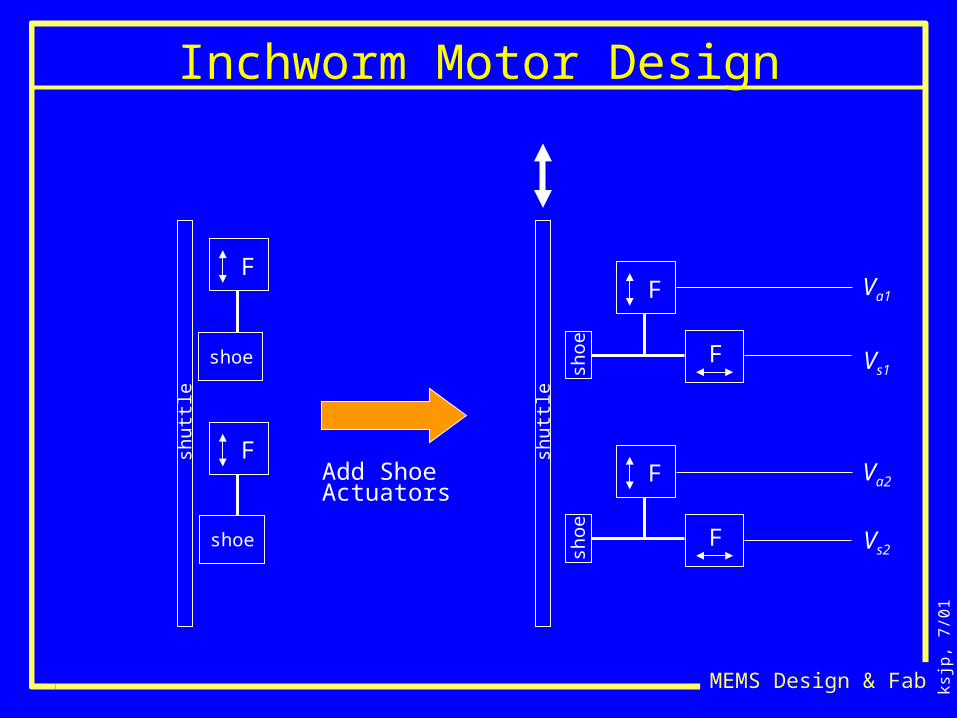
Inchworm Motor Design
F
F
shoe
F
F
shoe
shut
tle
Vs1
Va2
Vs2
Va1
shoe
shut
tle
F
F
shoe
Add ShoeActuators
ksjp
, 7/0
1
MEMS Design & Fab
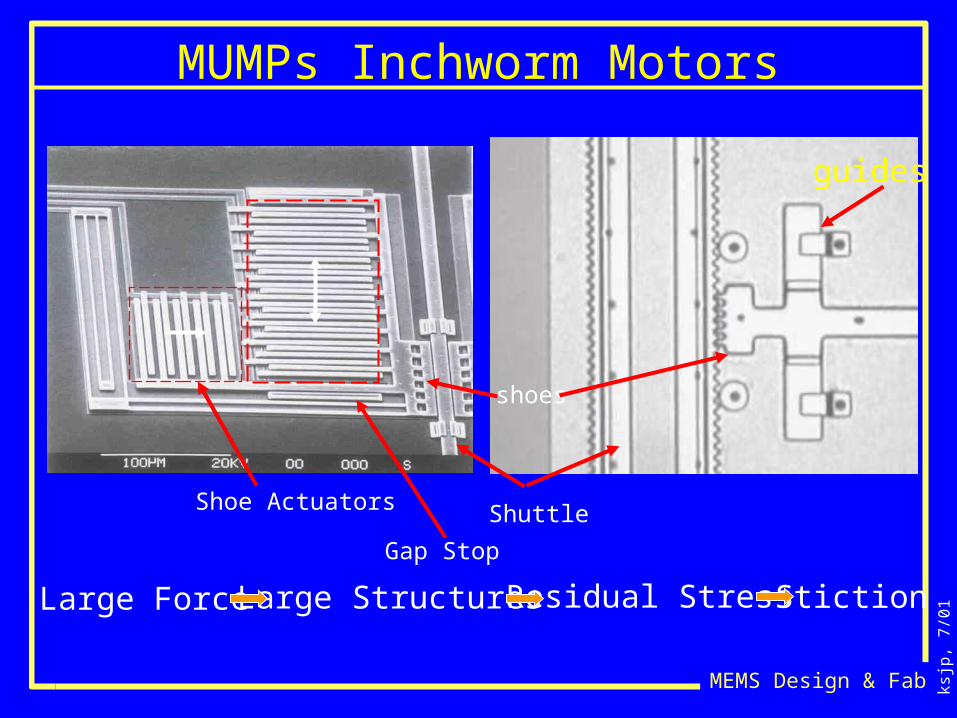
guides
MUMPs Inchworm Motors
Gap Stop
Shoe Actuators Shuttle
Large Force Large Structures Residual Stress Stiction
shoes
ksjp
, 7/0
1
MEMS Design & Fab
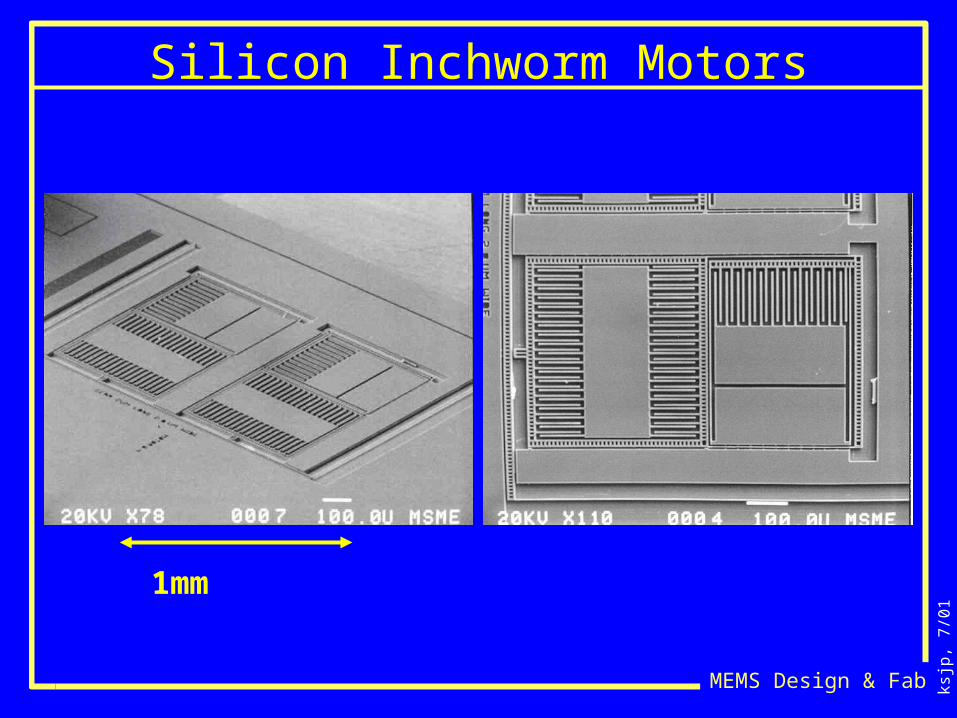
Silicon Inchworm Motors
1mm
ksjp
, 7/0
1
MEMS Design & Fab
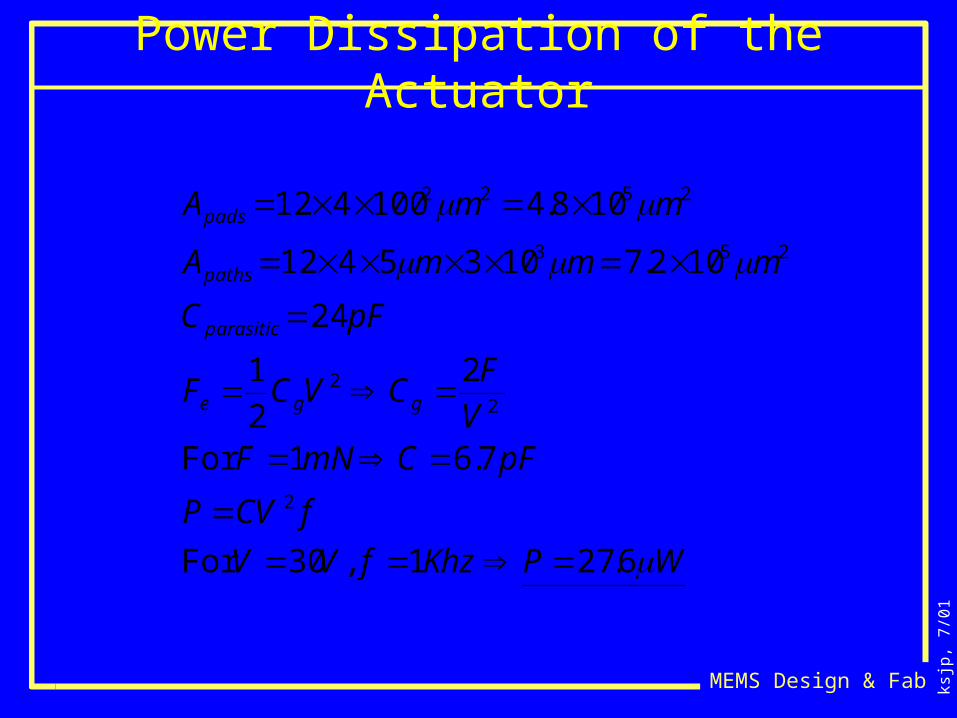
Power Dissipation of the Actuator
WPKhzfVV
fCVP
pFCmNFV
FCVCF
pFC
mmmA
mmA
gge
parasitic
paths
pads
6.271,30For
7.61For
2
2
1
24
102.71035412
108.4100412
2
22
253
2522
ksjp
, 7/0
1
MEMS Design & Fab
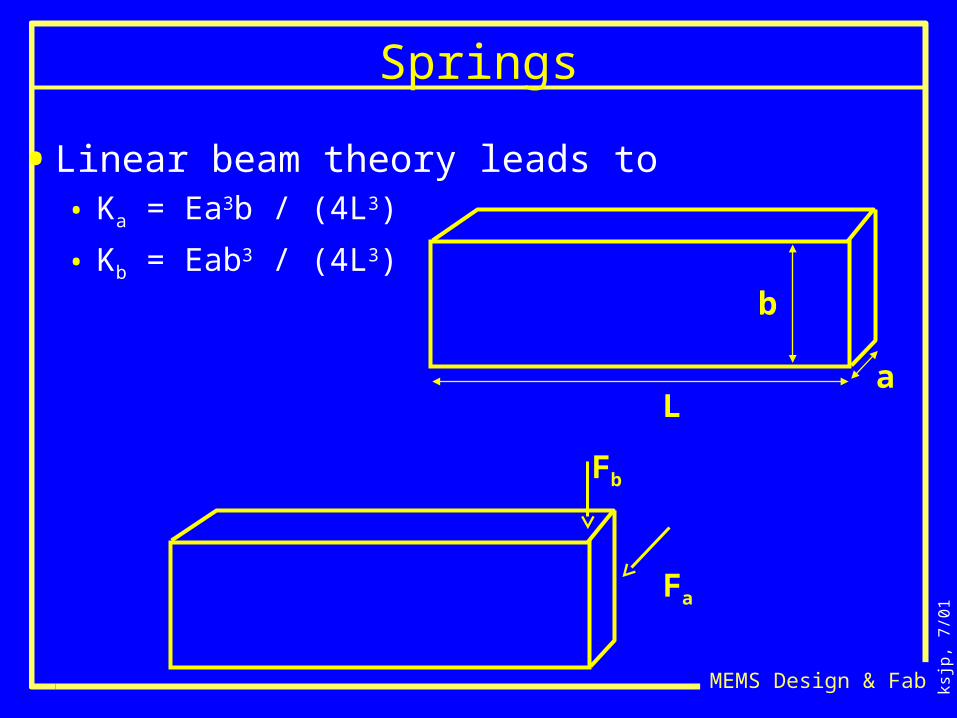
Springs
• Linear beam theory leads to• Ka = Ea3b / (4L3)
• Kb = Eab3 / (4L3)
L
b
a
Fa
Fb
ksjp
, 7/0
1
MEMS Design & Fab
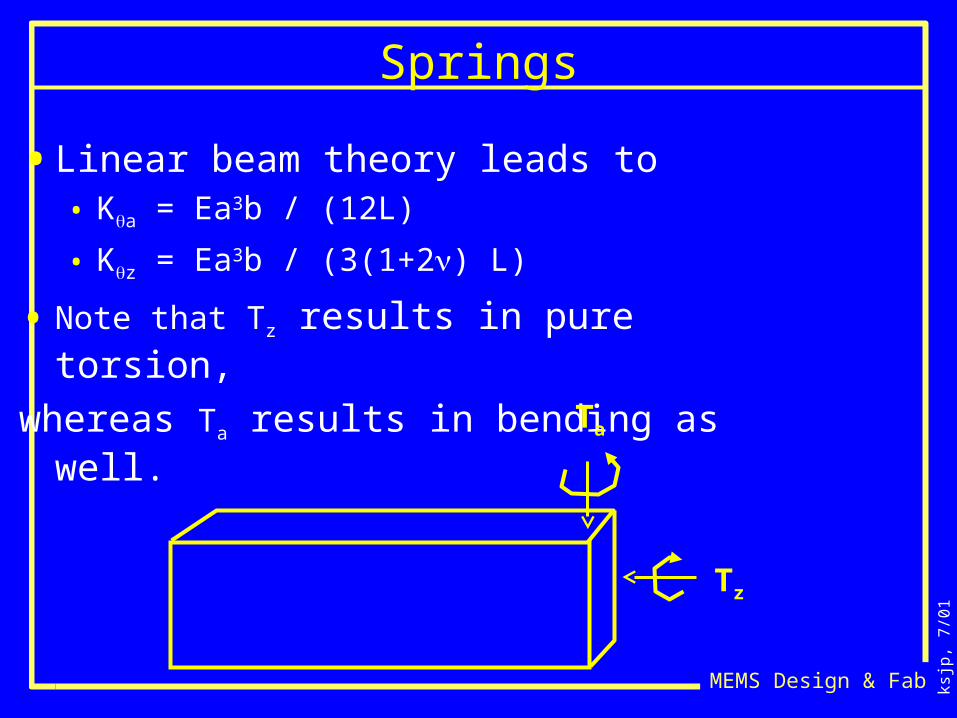
Springs
• Linear beam theory leads to• Ka = Ea3b / (12L)
• Kz = Ea3b / (3(1+2) L)
• Note that Tz results in pure torsion,
whereas Ta results in bending as well.Ta
Tz
ksjp
, 7/0
1
MEMS Design & Fab
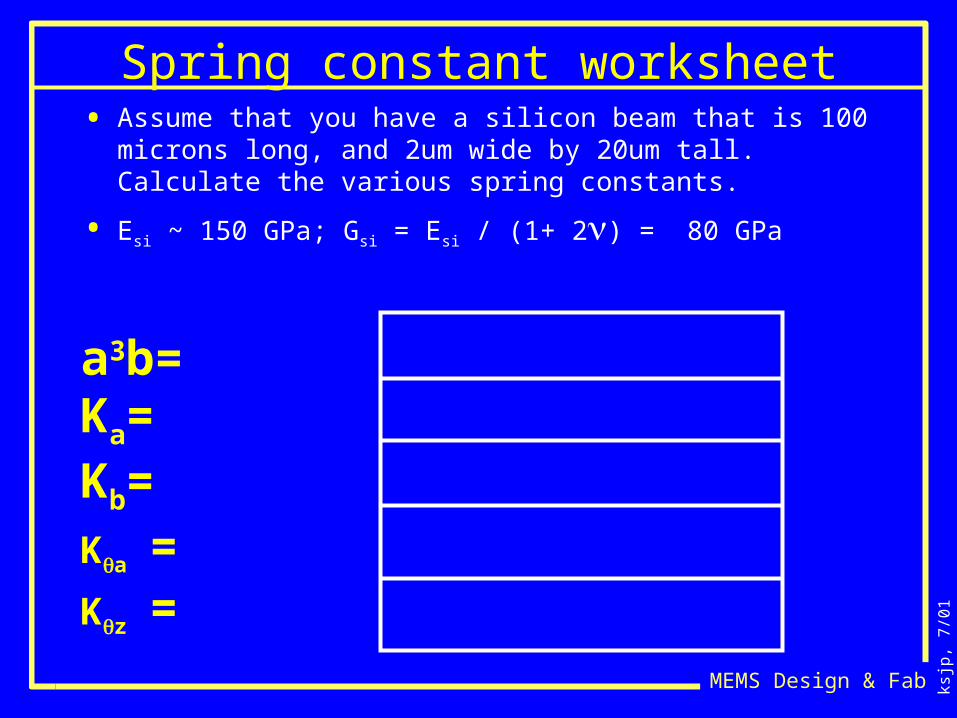
Spring constant worksheet• Assume that you have a silicon beam that is 100 microns long,
and 2um wide by 20um tall. Calculate the various spring constants.
• Esi ~ 150 GPa; Gsi = Esi / (1+ 2) = 80 GPa
a3b=Ka=Kb=Ka =Kz =
ksjp
, 7/0
1
MEMS Design & Fab
Damping• Two kinds of viscous (fluid) damping
• Couette: b = A/g ; = 1.8x10-5 Ns/m2 • Squeeze-film: b ~ W3L/g3 • proportional to pressure
• Dynamics:• m a + b v +k x = Fext
• If x(t) = xo sin(t) then
• v(t) = xo cos(t)
• a(t) = - 2xo sin(t)
• -m2xosin(t) + bxocos(t) +kxosin(t) = Fext
ksjp
, 7/0
1
MEMS Design & Fab
Dynamic forces, fixed amplitude xo
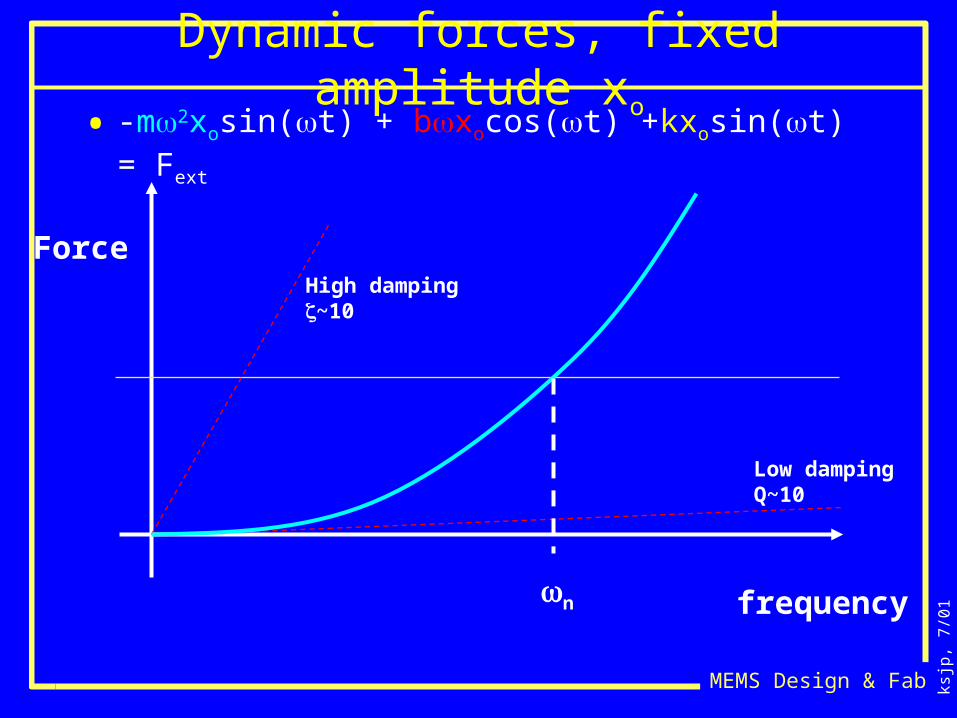
• -m2xosin(t) + bxocos(t) +kxosin(t) = Fext
frequency
Force
n
Low dampingQ~10
High damping~10
ksjp
, 7/0
1
MEMS Design & Fab
Dynamic forces, fixed amplitude xo
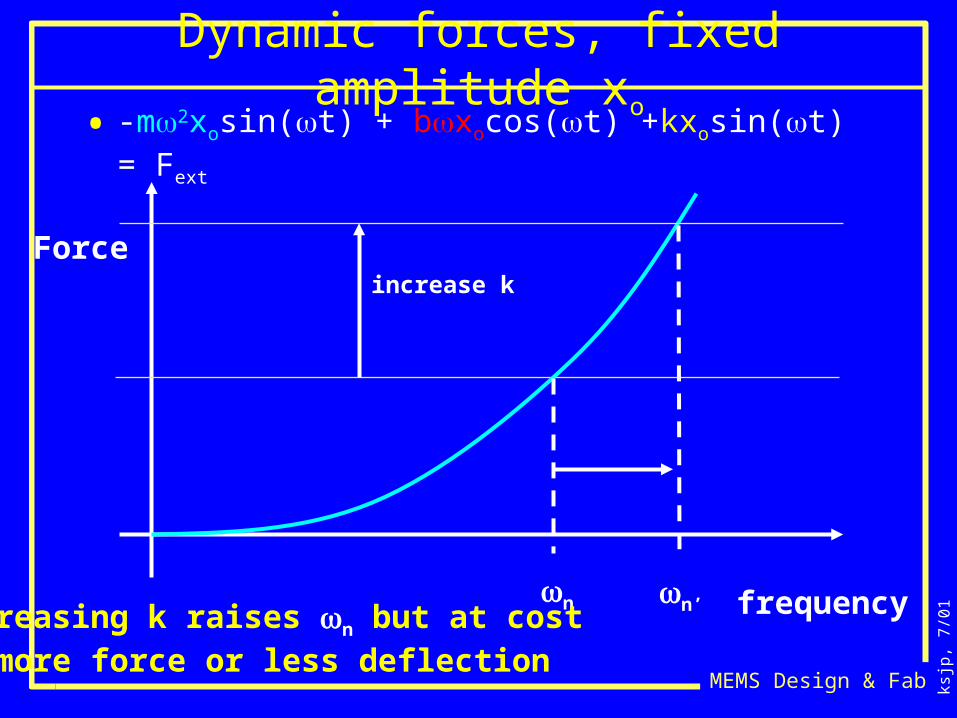
• -m2xosin(t) + bxocos(t) +kxosin(t) = Fext
frequency
Force
n
increase k
Increasing k raises n but at costof more force or less deflection
n’
ksjp
, 7/0
1
MEMS Design & Fab
Dynamic forces, fixed amplitude xo
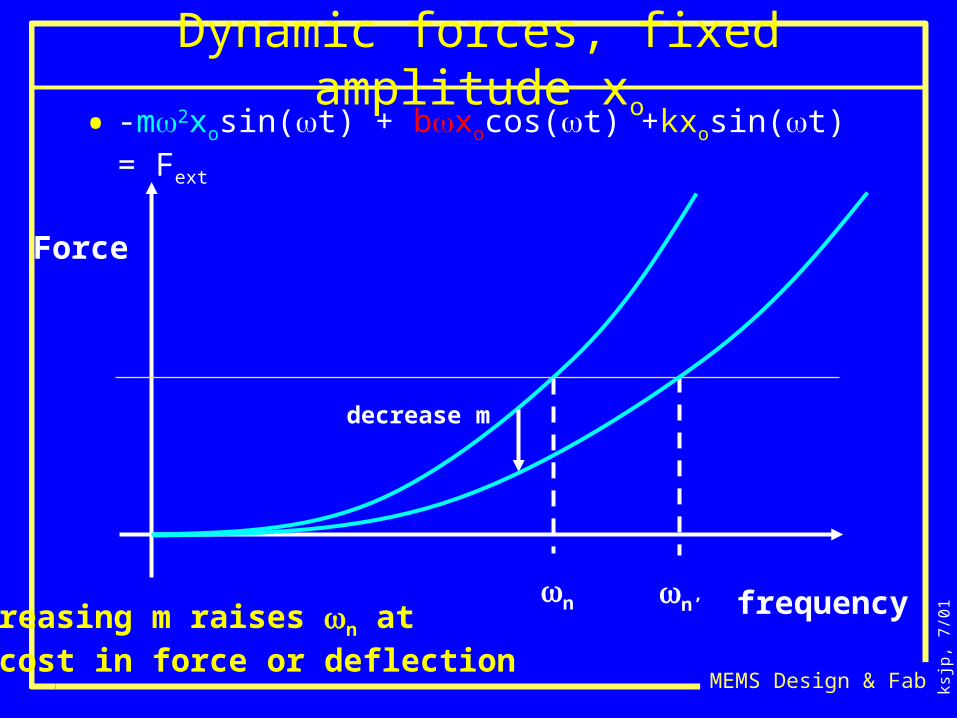
• -m2xosin(t) + bxocos(t) +kxosin(t) = Fext
frequency
Force
n n’Decreasing m raises n atno cost in force or deflection
decrease m
ksjp
, 7/0
1
MEMS Design & Fab
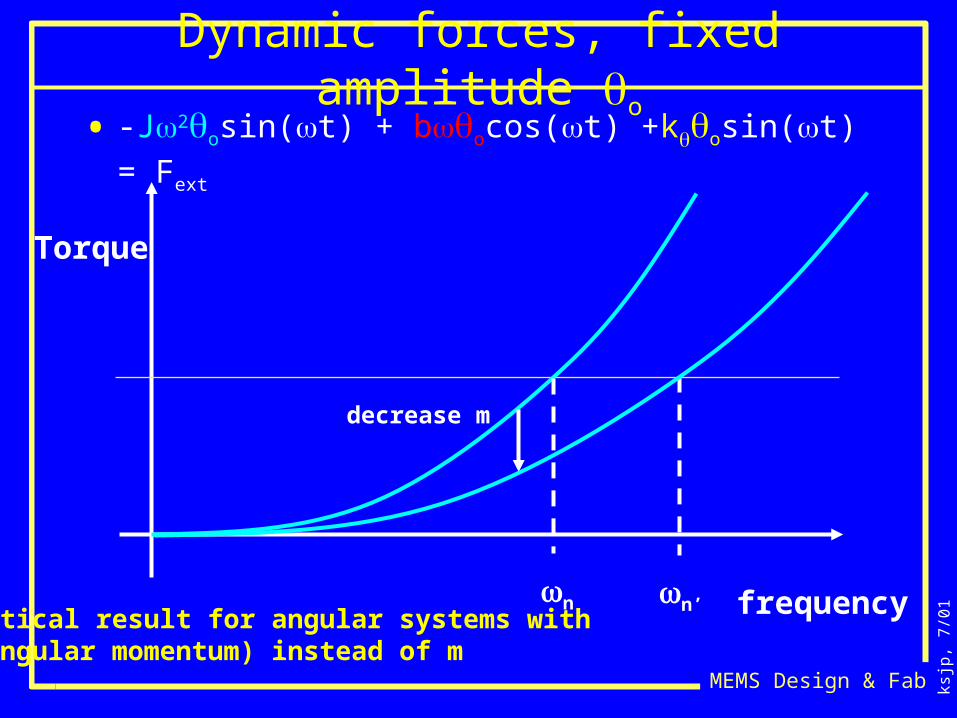
Dynamic forces, fixed amplitude o
• -J2osin(t) + bocos(t) +kosin(t) = Fext
frequency
Torque
n n’Identical result for angular systems withJ (angular momentum) instead of m
decrease m
ksjp
, 7/0
1
MEMS Design & Fab
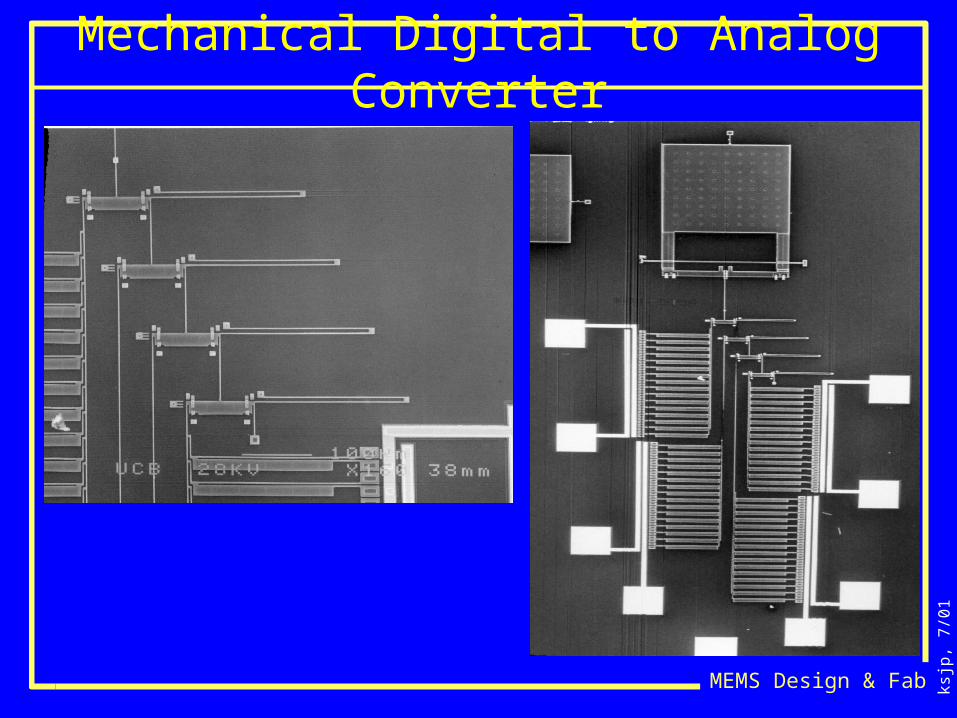
Mechanical Digital to Analog Converter
ksjp
, 7/0
1
MEMS Design & Fab
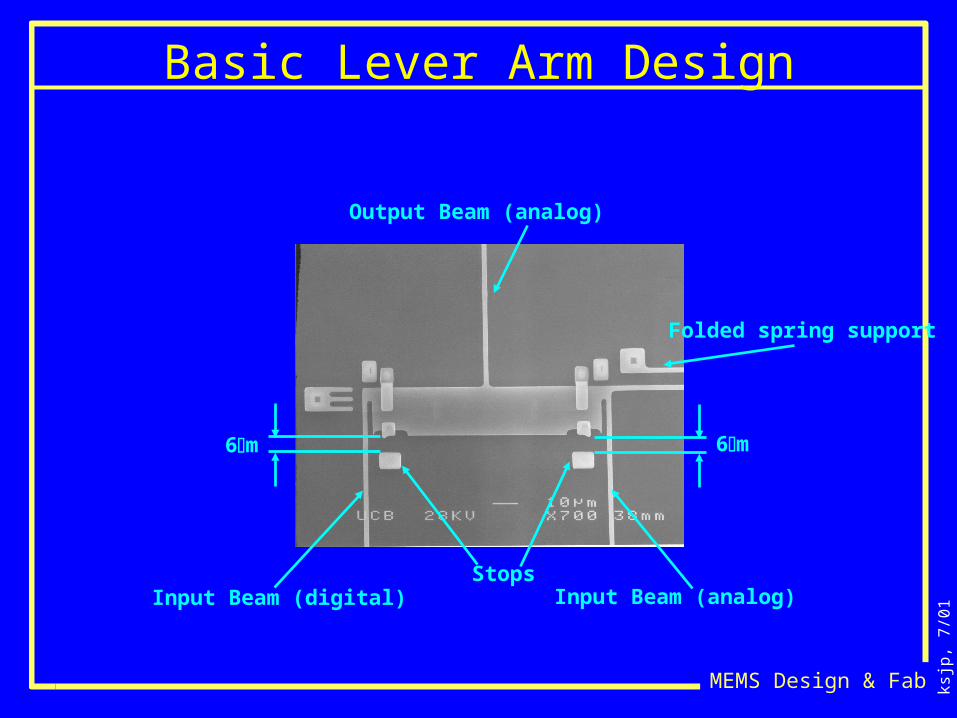
Basic Lever Arm Design
Stops
6m6m
Folded spring support
Input Beam (digital) Input Beam (analog)
Output Beam (analog)
ksjp
, 7/0
1
MEMS Design & Fab
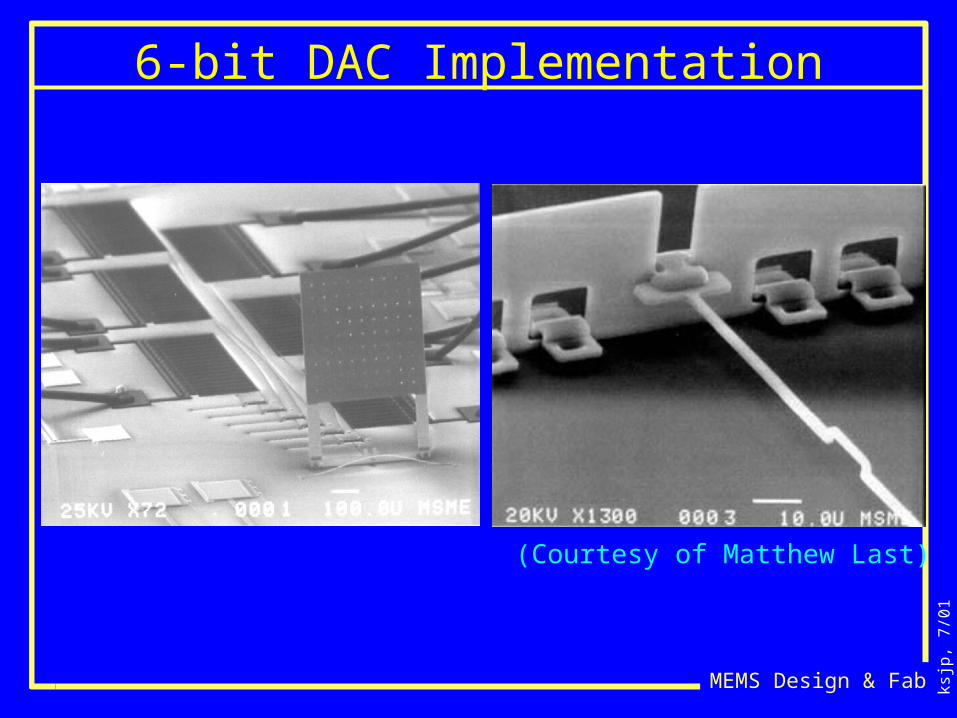
6-bit DAC Implementation
(Courtesy of Matthew Last)
ksjp
, 7/0
1
MEMS Design & Fab
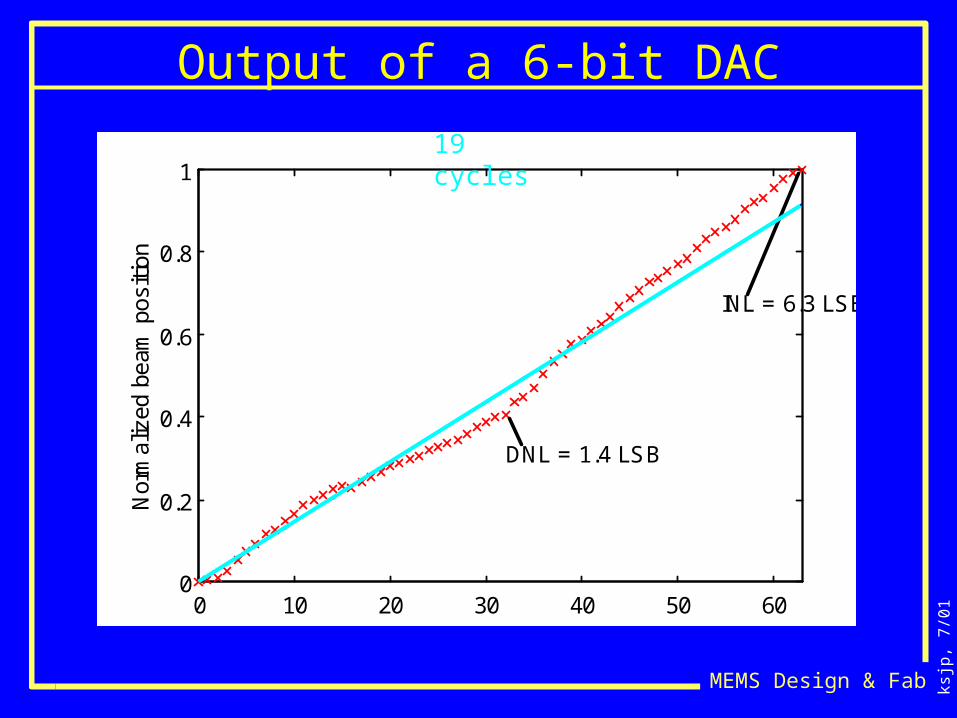
Output of a 6-bit DAC
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
DNL = 1.4 LSB
INL = 6.3 LSB
Digital input
Nor
mal
ized
bea
m p
ositi
on19 cycles