Embed Size (px)
Citation preview

Kobe University Repository Thesis
学位論文題目Tit le 二足歩行ロボットの動作生成への神経振動子の適用に関する研究
氏名Author 片山 修
専攻分野Degree 博士(工学)
学位授与の日付Date of Degree 1997-03-31
資源タイプResource Type Thesis or Dissertat ion 学位論文
報告番号Report Number 甲1695
権利Rights
JaLCDOI 10115013129805
URL httpwwwlibkobe-uacjphandle_kernelD1001695当コンテンツは神戸大学の学術成果です無断複製不正使用等を禁じます著作権法で認められている範囲内で適切にご利用ください
PDF issue 2020-05-21
博士論文
二足歩行ロボットの動作生成への
神経振動子の適用に関する研究
平成 9年3月
神戸大学大学院自然科学研究科
片山 修
要旨
二脚による移動形態は車両型移動機械に不適な環境での移動手段となると共にその
メカニズムの研究は障害者に対する動力義足への応用など医学的にも有用であるといえ
る移動ロボットにとって環境を認識 し自ら運動パターンを生成する能力を持つことは
ロボットの自律化といった観点からも重要であるとくに二足歩行ロボットに定常歩行あ
るいは非定常歩行させる場合には各関節の軌道計画が重要であり環境に適応するために
学習 適応機能を持たせなければならないすなわちロボットの自律化が要求される
生物が手や足を動かす等の運動を行 う場合脊髄に存在する神経系から運動指令が与
えられる特に歩行などリズムによって生成される運動ではセントラルパターンジェネ
レータがその運動生成に関わっているとされているセントラルパターンジェネレータを
表すニューロンは神経振動子 と呼ばれ一般に神経振動子方程式で表されるそこで本論文
ではセントラルパターンジェネレータを用いて歩行運動を生成し二足歩行ロボットの運動
制御を行 うことを当研究の目的とする
第 1章ではロボットの研究や二足歩行ロボットの研究における背景や現状について
述べる
第 2章では4つの振動子をそれぞれ抑制的に結合させたモデルを提案 し1つの振動
子の内部状態を関節角度に割 り当てた4つの振動子の内部状態が適当な振幅 と位相を
持って振動した場合に歩行運動が実現できること計算機シミュレーションによってを示
すただし歩行するために振動子をどのように結合させれば良いかという結合パラメー
タの設定問題に対 しては予備知識はなく試行錯誤な探索を行っていたそこで振動子
方程式の振動解 として正弦波状の近似解を仮定 し記述関数法を用いることによって結
合パラメータが満たすべき条件式を導出したまた導出した条件式に対 して歩幅と足
の振 り上げ高さを与えることによって幾何学的な条件と歩行における左右の足の運動の
対称性から近似解の振幅と位相を求める事ができることを示 したこれにより角周波数
はこの段階では一意に決定できないが設定した歩行パターンを実現するための振動子の
結合パラメータを求めることができたさらに提案 した振動子の構造において生成され
る歩行軌道に対 してその歩幅と足を上げる高さの関係についても考察したこれにより
制限された条件の下ではあるが二足歩行運動を与えられたパターンに設計する方法が確
立できた
第 3章では二足歩行運動の実現を振動子の結合パラメータに関する最適化問題と捉
え遺伝的アルゴリズムによってパラメータの探索を行った遺伝的アルゴリズムにおけ
る評価関数は歩行運動におけるロボットの幾何学的な条件を満足することによって高い
評価が得られるようになっている評価関数については歩行中のロボットの各関節角を
評価するものロボットの移動距離について評価するものその両方を用いて評価する三
通りの評価関数を設定 し計算機シミュレーションによってこの手法の有効性を検討した
その結果設定した条件を満たす二足歩行運動を実現する振動子のパラメータを決定する
ことが可能となったがこの方法では必ずしも多様な歩行パターンが発現できることは確
認できなかった
第 4章では神経振動子によって生成された二足歩行運動パターンの有効性を検討する
ために6リンク6自由度の高さ25Clllの小型ロボットを作製し歩行実験を行なったこ
の結果神経振動子による軌道生成の有効性が示せたまた比較のために倒立振子方程
式とホップフィールド形ニューラルネットを用いた階層形軌道生成システムを用いた歩行
実験も同時に行なった実験では歩行が実現できたが安定な歩行を行なうにはロボット
の初期姿勢などを調節する必要があることが分かった
第 5章に本研究の結果のまとめと今後の研究課題を示す
目 次
第 1章 序論
11 はじめに
12 二足歩行ロボットの運動生成と制御の研究動向
第2章 二足歩行運動の軌道生成
21 はじめに
l
1
2
5
22 軌道生成のための神経振動子モデル 5
23 シミュレーションのための二足歩行ロボットモデル
24 シミュレーションによる結果
25 記述関数法による振動子の解析
26 歩行パターンの設計
27 結合パラメータの決定とそれによる歩行パターン
28 おわりに
第 3章 進化的学習法による結合パラメータの探索
31 はじめに
32 遺伝的アルゴリズムの概要
33 最適な結合パラメータの探索
331 遺伝子型の設定
332 遺伝オペレータの設定
333 適応度関数の定義
34 シミュレーションによる結果
341 結合パラメータの最適化探索
342 結合パラメータ定常入力疲労度係数の最適化探索
6
7
10
12
14
17
19
19
19
21
21
22
22
26
26
34
35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
博士論文
二足歩行ロボットの動作生成への
神経振動子の適用に関する研究
平成 9年3月
神戸大学大学院自然科学研究科
片山 修
要旨
二脚による移動形態は車両型移動機械に不適な環境での移動手段となると共にその
メカニズムの研究は障害者に対する動力義足への応用など医学的にも有用であるといえ
る移動ロボットにとって環境を認識 し自ら運動パターンを生成する能力を持つことは
ロボットの自律化といった観点からも重要であるとくに二足歩行ロボットに定常歩行あ
るいは非定常歩行させる場合には各関節の軌道計画が重要であり環境に適応するために
学習 適応機能を持たせなければならないすなわちロボットの自律化が要求される
生物が手や足を動かす等の運動を行 う場合脊髄に存在する神経系から運動指令が与
えられる特に歩行などリズムによって生成される運動ではセントラルパターンジェネ
レータがその運動生成に関わっているとされているセントラルパターンジェネレータを
表すニューロンは神経振動子 と呼ばれ一般に神経振動子方程式で表されるそこで本論文
ではセントラルパターンジェネレータを用いて歩行運動を生成し二足歩行ロボットの運動
制御を行 うことを当研究の目的とする
第 1章ではロボットの研究や二足歩行ロボットの研究における背景や現状について
述べる
第 2章では4つの振動子をそれぞれ抑制的に結合させたモデルを提案 し1つの振動
子の内部状態を関節角度に割 り当てた4つの振動子の内部状態が適当な振幅 と位相を
持って振動した場合に歩行運動が実現できること計算機シミュレーションによってを示
すただし歩行するために振動子をどのように結合させれば良いかという結合パラメー
タの設定問題に対 しては予備知識はなく試行錯誤な探索を行っていたそこで振動子
方程式の振動解 として正弦波状の近似解を仮定 し記述関数法を用いることによって結
合パラメータが満たすべき条件式を導出したまた導出した条件式に対 して歩幅と足
の振 り上げ高さを与えることによって幾何学的な条件と歩行における左右の足の運動の
対称性から近似解の振幅と位相を求める事ができることを示 したこれにより角周波数
はこの段階では一意に決定できないが設定した歩行パターンを実現するための振動子の
結合パラメータを求めることができたさらに提案 した振動子の構造において生成され
る歩行軌道に対 してその歩幅と足を上げる高さの関係についても考察したこれにより
制限された条件の下ではあるが二足歩行運動を与えられたパターンに設計する方法が確
立できた
第 3章では二足歩行運動の実現を振動子の結合パラメータに関する最適化問題と捉
え遺伝的アルゴリズムによってパラメータの探索を行った遺伝的アルゴリズムにおけ
る評価関数は歩行運動におけるロボットの幾何学的な条件を満足することによって高い
評価が得られるようになっている評価関数については歩行中のロボットの各関節角を
評価するものロボットの移動距離について評価するものその両方を用いて評価する三
通りの評価関数を設定 し計算機シミュレーションによってこの手法の有効性を検討した
その結果設定した条件を満たす二足歩行運動を実現する振動子のパラメータを決定する
ことが可能となったがこの方法では必ずしも多様な歩行パターンが発現できることは確
認できなかった
第 4章では神経振動子によって生成された二足歩行運動パターンの有効性を検討する
ために6リンク6自由度の高さ25Clllの小型ロボットを作製し歩行実験を行なったこ
の結果神経振動子による軌道生成の有効性が示せたまた比較のために倒立振子方程
式とホップフィールド形ニューラルネットを用いた階層形軌道生成システムを用いた歩行
実験も同時に行なった実験では歩行が実現できたが安定な歩行を行なうにはロボット
の初期姿勢などを調節する必要があることが分かった
第 5章に本研究の結果のまとめと今後の研究課題を示す
目 次
第 1章 序論
11 はじめに
12 二足歩行ロボットの運動生成と制御の研究動向
第2章 二足歩行運動の軌道生成
21 はじめに
l
1
2
5
22 軌道生成のための神経振動子モデル 5
23 シミュレーションのための二足歩行ロボットモデル
24 シミュレーションによる結果
25 記述関数法による振動子の解析
26 歩行パターンの設計
27 結合パラメータの決定とそれによる歩行パターン
28 おわりに
第 3章 進化的学習法による結合パラメータの探索
31 はじめに
32 遺伝的アルゴリズムの概要
33 最適な結合パラメータの探索
331 遺伝子型の設定
332 遺伝オペレータの設定
333 適応度関数の定義
34 シミュレーションによる結果
341 結合パラメータの最適化探索
342 結合パラメータ定常入力疲労度係数の最適化探索
6
7
10
12
14
17
19
19
19
21
21
22
22
26
26
34
35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

要旨
二脚による移動形態は車両型移動機械に不適な環境での移動手段となると共にその
メカニズムの研究は障害者に対する動力義足への応用など医学的にも有用であるといえ
る移動ロボットにとって環境を認識 し自ら運動パターンを生成する能力を持つことは
ロボットの自律化といった観点からも重要であるとくに二足歩行ロボットに定常歩行あ
るいは非定常歩行させる場合には各関節の軌道計画が重要であり環境に適応するために
学習 適応機能を持たせなければならないすなわちロボットの自律化が要求される
生物が手や足を動かす等の運動を行 う場合脊髄に存在する神経系から運動指令が与
えられる特に歩行などリズムによって生成される運動ではセントラルパターンジェネ
レータがその運動生成に関わっているとされているセントラルパターンジェネレータを
表すニューロンは神経振動子 と呼ばれ一般に神経振動子方程式で表されるそこで本論文
ではセントラルパターンジェネレータを用いて歩行運動を生成し二足歩行ロボットの運動
制御を行 うことを当研究の目的とする
第 1章ではロボットの研究や二足歩行ロボットの研究における背景や現状について
述べる
第 2章では4つの振動子をそれぞれ抑制的に結合させたモデルを提案 し1つの振動
子の内部状態を関節角度に割 り当てた4つの振動子の内部状態が適当な振幅 と位相を
持って振動した場合に歩行運動が実現できること計算機シミュレーションによってを示
すただし歩行するために振動子をどのように結合させれば良いかという結合パラメー
タの設定問題に対 しては予備知識はなく試行錯誤な探索を行っていたそこで振動子
方程式の振動解 として正弦波状の近似解を仮定 し記述関数法を用いることによって結
合パラメータが満たすべき条件式を導出したまた導出した条件式に対 して歩幅と足
の振 り上げ高さを与えることによって幾何学的な条件と歩行における左右の足の運動の
対称性から近似解の振幅と位相を求める事ができることを示 したこれにより角周波数
はこの段階では一意に決定できないが設定した歩行パターンを実現するための振動子の
結合パラメータを求めることができたさらに提案 した振動子の構造において生成され
る歩行軌道に対 してその歩幅と足を上げる高さの関係についても考察したこれにより
制限された条件の下ではあるが二足歩行運動を与えられたパターンに設計する方法が確
立できた
第 3章では二足歩行運動の実現を振動子の結合パラメータに関する最適化問題と捉
え遺伝的アルゴリズムによってパラメータの探索を行った遺伝的アルゴリズムにおけ
る評価関数は歩行運動におけるロボットの幾何学的な条件を満足することによって高い
評価が得られるようになっている評価関数については歩行中のロボットの各関節角を
評価するものロボットの移動距離について評価するものその両方を用いて評価する三
通りの評価関数を設定 し計算機シミュレーションによってこの手法の有効性を検討した
その結果設定した条件を満たす二足歩行運動を実現する振動子のパラメータを決定する
ことが可能となったがこの方法では必ずしも多様な歩行パターンが発現できることは確
認できなかった
第 4章では神経振動子によって生成された二足歩行運動パターンの有効性を検討する
ために6リンク6自由度の高さ25Clllの小型ロボットを作製し歩行実験を行なったこ
の結果神経振動子による軌道生成の有効性が示せたまた比較のために倒立振子方程
式とホップフィールド形ニューラルネットを用いた階層形軌道生成システムを用いた歩行
実験も同時に行なった実験では歩行が実現できたが安定な歩行を行なうにはロボット
の初期姿勢などを調節する必要があることが分かった
第 5章に本研究の結果のまとめと今後の研究課題を示す
目 次
第 1章 序論
11 はじめに
12 二足歩行ロボットの運動生成と制御の研究動向
第2章 二足歩行運動の軌道生成
21 はじめに
l
1
2
5
22 軌道生成のための神経振動子モデル 5
23 シミュレーションのための二足歩行ロボットモデル
24 シミュレーションによる結果
25 記述関数法による振動子の解析
26 歩行パターンの設計
27 結合パラメータの決定とそれによる歩行パターン
28 おわりに
第 3章 進化的学習法による結合パラメータの探索
31 はじめに
32 遺伝的アルゴリズムの概要
33 最適な結合パラメータの探索
331 遺伝子型の設定
332 遺伝オペレータの設定
333 適応度関数の定義
34 シミュレーションによる結果
341 結合パラメータの最適化探索
342 結合パラメータ定常入力疲労度係数の最適化探索
6
7
10
12
14
17
19
19
19
21
21
22
22
26
26
34
35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
第 3章では二足歩行運動の実現を振動子の結合パラメータに関する最適化問題と捉
え遺伝的アルゴリズムによってパラメータの探索を行った遺伝的アルゴリズムにおけ
る評価関数は歩行運動におけるロボットの幾何学的な条件を満足することによって高い
評価が得られるようになっている評価関数については歩行中のロボットの各関節角を
評価するものロボットの移動距離について評価するものその両方を用いて評価する三
通りの評価関数を設定 し計算機シミュレーションによってこの手法の有効性を検討した
その結果設定した条件を満たす二足歩行運動を実現する振動子のパラメータを決定する
ことが可能となったがこの方法では必ずしも多様な歩行パターンが発現できることは確
認できなかった
第 4章では神経振動子によって生成された二足歩行運動パターンの有効性を検討する
ために6リンク6自由度の高さ25Clllの小型ロボットを作製し歩行実験を行なったこ
の結果神経振動子による軌道生成の有効性が示せたまた比較のために倒立振子方程
式とホップフィールド形ニューラルネットを用いた階層形軌道生成システムを用いた歩行
実験も同時に行なった実験では歩行が実現できたが安定な歩行を行なうにはロボット
の初期姿勢などを調節する必要があることが分かった
第 5章に本研究の結果のまとめと今後の研究課題を示す
目 次
第 1章 序論
11 はじめに
12 二足歩行ロボットの運動生成と制御の研究動向
第2章 二足歩行運動の軌道生成
21 はじめに
l
1
2
5
22 軌道生成のための神経振動子モデル 5
23 シミュレーションのための二足歩行ロボットモデル
24 シミュレーションによる結果
25 記述関数法による振動子の解析
26 歩行パターンの設計
27 結合パラメータの決定とそれによる歩行パターン
28 おわりに
第 3章 進化的学習法による結合パラメータの探索
31 はじめに
32 遺伝的アルゴリズムの概要
33 最適な結合パラメータの探索
331 遺伝子型の設定
332 遺伝オペレータの設定
333 適応度関数の定義
34 シミュレーションによる結果
341 結合パラメータの最適化探索
342 結合パラメータ定常入力疲労度係数の最適化探索
6
7
10
12
14
17
19
19
19
21
21
22
22
26
26
34
35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
目 次
第 1章 序論
11 はじめに
12 二足歩行ロボットの運動生成と制御の研究動向
第2章 二足歩行運動の軌道生成
21 はじめに
l
1
2
5
22 軌道生成のための神経振動子モデル 5
23 シミュレーションのための二足歩行ロボットモデル
24 シミュレーションによる結果
25 記述関数法による振動子の解析
26 歩行パターンの設計
27 結合パラメータの決定とそれによる歩行パターン
28 おわりに
第 3章 進化的学習法による結合パラメータの探索
31 はじめに
32 遺伝的アルゴリズムの概要
33 最適な結合パラメータの探索
331 遺伝子型の設定
332 遺伝オペレータの設定
333 適応度関数の定義
34 シミュレーションによる結果
341 結合パラメータの最適化探索
342 結合パラメータ定常入力疲労度係数の最適化探索
6
7
10
12
14
17
19
19
19
21
21
22
22
26
26
34
35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

35 結果に対する考察
36 おわりに
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
42 小型二足歩行ロボットの製作
43 神経振動子を用いたロボットの歩行実験結果
44 階層型軌道生成システム
441 倒立振子方程式による着地位置の決定
38
40
42
42
42
44
46
47
442 ホップフィールド形ニューラルネットによる逆運動学の解法 50
45 階層型軌道生成システムを用いた歩行実験 51
46 おわりに
第 5章 結論
謝辞
参考文献
本論文に関連する論文 講演
伺j銀
ll
55
56
57
58
63
64
第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

第 1章 序論
11 はじめに
ロボット技術の発展に伴ってさらなる高度ロボットの研究開発が多 く行なわれてい
る初期においては教示を必要としていた産業用のロボット技術 も人間と同じようにモ
ノを視て触って自分のとるべき行動を判断できる知能を持ち行動を起こす機能が付加さ
れてきているすなわち知能的でかつ自律的なロボットの開発が行なわれておV上 それら
のロボットは人と揺する機会の多い医療福祉サービス災害救助娯楽等の様々な分野
での活躍が期待される
知能ロボットの研究は生物の知的行動を模倣する機能を持った機械を作ろうとする
ものであったそのためあらかじめ与えられた知識を行動の規範とする人工知能的なシ
ステムが構築されてきたしかし複雑な運動をさせる場合与えるべき知識の量が膨大
になりすぎたり情報の不確実性が問題となるそこで人工神経回路網や遺伝的アルゴ
リズムを用いてロボット自体が環境との相互作用によって環境認識や行動決定を行な
うといった学習を中心としたシステムの構築がなされるようになってきたこれは生理
学的な見地から脳の仕組みを解明しようとする動きにならって脳のモデルを工学的に実
現してそこから脳の仕組みを推測 し解明しようとする動きでもあるこのように学習
によって有効な機能を獲得できる内部モデルをもったロボットはその目的を達成するた
めに外界との接触によってロボットの内部モデルを自己組織化していくロボット自身
が学習によって得られた内部モデルを用いて行動を起こしさらにロボットが環境を認識
し内部モデルを更新しつつ行動を起こすものが自律ロボットである
例えば人間の歩行運動を考えてみるまず生まれたばか りでは歩行を行なうため
に神経系はどのように筋骨格系をコントロールして良いかわからないしかし自ら試行
錯誤を繰 り返し学習を行なっているうちに環境と自分の肉体的条件のもとで合理的な歩
行ができるようになるこのような自己組織化が生物の成長過程においてみられ運動パ
ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ターンが獲得されていく
学習においては外部からの信号を直接用いる 教師あり学習と学習者の内部で自然
と学習が行なわれている教師なし学習とに分けられる前者は主に人工神経回路網に
おける誤差逆伝播法が挙げられるこの方法はある程度の入力 出力の学習セットを用意
し入力に対する自らの出力と教師としての出力との誤差を減少 していくアルゴリズムで
ある一方教師なし学習は遺伝的アルゴリズムのように探索を行なうものや起こした
行動に対 して報酬または罰をあたえる強化学習といったものがある最近ではロボット
学習の枠組として強化学習の適用が試みられている甘
このような背景のもと現在のロボットの研究に関する方向としては人の脳の機能と
運動性能を持った究極の人間型ロボットの開発にあるといえるしかしながら脳の機能
が完全に解明されていないため現段階では人の持つすべての運動機能をロボットに完全
に実装させるのは困難であり各運動機能を個別に実現しそのメカニズムを解明している
段階であるこれを構成的研究という本研究では人の行なう二足歩行運動とその運動
パターンを発生する神経系の関係に着冒し非線形微分方程式で表される神経振動子を用
いて軌道生成システムの構成を行なったまた発生した運動パターンを実際にロボットに
適用することによってシステムの有意性について考察した
12 二足歩行ロボットの運動生成と制御の研究動向
様々な機能を持ったロボットの中でも特に移動型ロボットにおいてその移動機構が問
題になるが現存する走行型の移動装置では移動できいないような場所での作業を考えて
みると歩行型のロボットは有効な移動機構となり得る二足歩行形ロボットの研究の意
義は医療福祉のための動力義足を開発するため生体系の解析現代制御理論を実証する
ため現存する走行型の移動装置では移動できない様な場所での作業を行う極限作業用ロ
ボットなどの移動装置を開発するためなど研究者により様々であるしかしながら二足
歩行形ロボットの実現には多くの問題があり多 くの研究室において様々な方向から研究
が行われている【56】そこで研究の方向としては次のようなものがある
まず制御工学並びにロボット工学の立場からの研究としてはけり効果を利用した動
的歩行の研究 【78】また両足支持期におけるトルク配分制御の研究 【9】足先と腰にサイ
クロイド曲線を用いた歩行軌道の生成の研究 [101マニピュレータを二足歩行系のモデル
2
として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

として用い重心位置と足先位置を制御 して目標位置へ収束させる研究 【11ト単脚支持相と
両脚支持相の繰返 しによる適応歩行についての研究も報告されている【12ト高度な制御の
研究としては学習制御理論を適用し歩行運動パターンを獲得する研究 【131更に繰返 し
制御を用いた歩行実験 【14】倒立振子方程式とニューラルネットワークを用いて三次元の
自律的な歩行軌道の生成に関する研究 [1司等があるまた歩行ではないが倒れた状態や椅
子に座った状態から立ち上がる剛 支を持った人間型ロボットの研究もされている【16]
一方近年の神経生理学の発展から脊髄にリズ ミックなパターンを生成する神経回路網
(Centralpattcrllgelt(-1加 ol)が存在することが分かってきた [17]生物の運動で例えば心
臓の鼓動や呼吸遊泳羽ばたき嬬動運動阻境などの多 くの周期運動は周期的なパター
ンを発生する神経系によって制御されていることが生理学的実験から示唆されているし
かし生体システムは膨大な数の神経細胞から構成される大規模多自由度非線形非
定常並列分散システムであ り全貌を解明することは極めて困難なことであるそこで
数学モデルを用いた計算論的アプローチが重要となってくるこれは生体システムの本
質的な性質から何 らかの仮説を立てそれを元に様々な検証を行ないそのシステム特性
を理解 していこうとする立場であるこのことより人工的なパターン生成器を神経振動
子を用いて構成 し歩行運動を実現することが可能であると考えられる【18】ここでいう
神経振動子 とは非線形神経素子を相互に結合させたネットワークであ り引き込み現象
によって安定な振動を発生するものである素子の結合の方法としてはリング状に組み
合わせるなどの方法がある四 このような人工的なパターン生成についてはすでにいく
つかの報告がなされている湯浅は位相差のダイナミクスを導き運動パターンを表すポ
テンシャル関数を与えてエネルギー消費との関係で四足歩行の多様な歩行パターンを実現
している【20】また多賀清水らは神経振動子系と生体の筋骨格系とのリズムの引き込み
現象から柔軟な二足歩行運動を自己組織的に生成する方法を提案 している【2122ト
また神経振動子ではないが~11日lL1P()1方程式による振動子の場合に二足歩行のた
めのパターンの生成の解析 した研究がある 【23トHelllamiらはvanderPol方程式からな
る簡単な場合の結合振動子のパラメータと周期振幅位相差を計算機シミュレーション
で明らかにし二足歩行軌道の生成に適用した【24トさらにlrallderPol方程式と二足歩行
ロボットモデルの引き込みによる制御の研究がある【25]
他方生物の進化の過程を模倣 した遺伝アルゴリズムを用いて最適化問題に適用す
3
る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

る試みが数多 くなされている 【2627ト遺伝アルゴリズムと歩行ロボットに関する研究と
しては自律分散システムへの適用 【28]二足歩行ロボットの下肢軌道最適化に関する研究
【29】があるまた四足歩行ロボットの歩行を評価することによって神経振動子の結合係
数を最適化する手法も提案されている【30ト
4
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
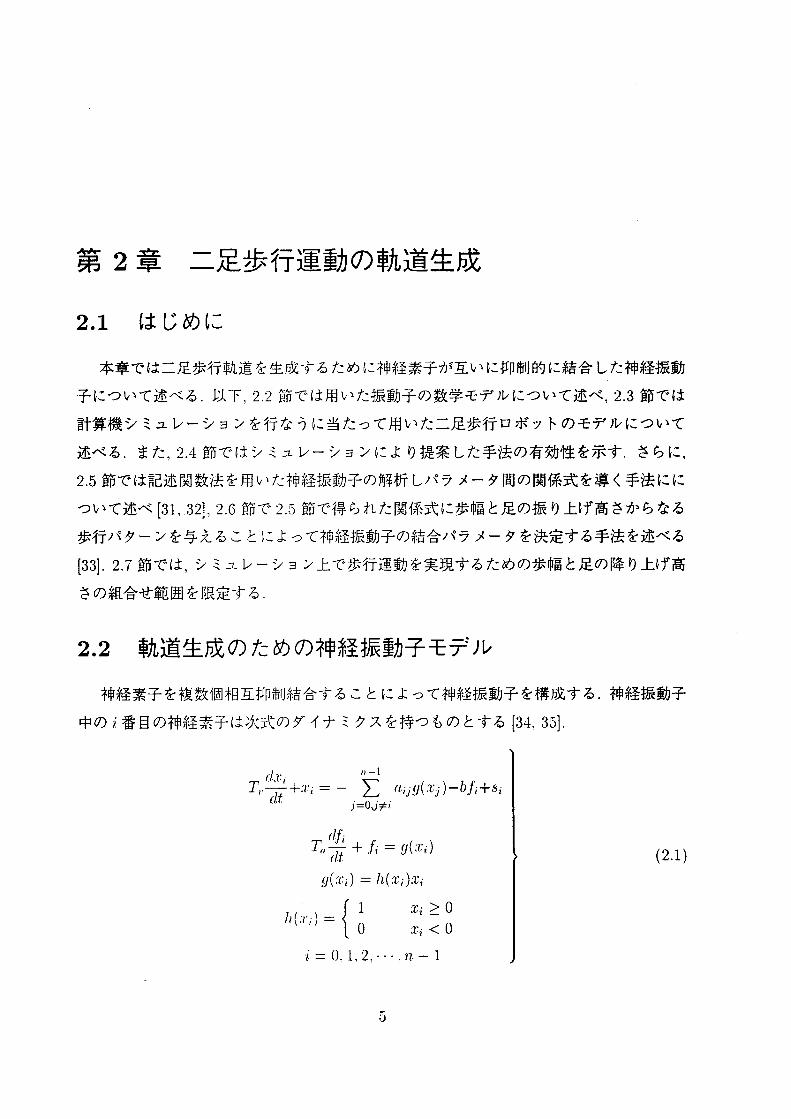
第 2章 二足歩行運動の軌道生成
21 はじめに
本章では二足歩行軌道を生成するために神経素子が互いに抑制的に結合 した神経振動
子について述べる以T22節では用いた振動子の数学モデルについて述べ23節では
計算機シミュレーションを行なうに当たって用いた二足歩行 ロボットのモデルについて
述べるまた24節ではシミュレーションにより提案 した手法の有効性 を示すさらに
25節では記述関数法を用いた神経振動子の解析 しパラメータ間の関係式を導 く手法にに
ついて述べ [3132い26節で 25節で得られた関係式に歩幅 と足の振 り上げ高 さからなる
歩行パターンを与えることによって神経振動子の結合パラメータを決定する手法を述べる
【33】27節ではシミュレーション上で歩行運動を実現するための歩幅 と足の降 り上げ高
さの組合せ範囲を限定する
22 軌道生成のための神経振動子モデル
神経素子を複数個相互抑制結合することによって神経振動子を構成する神経振動子
中の i番目の神経素子は次式のダイナ ミクスを持つものとする 【3435]
滝 77--蓋neLtjg(LTi-bfisi
+fi-g(Ltli)
9(1J)-I巾)7i
)(Llint)-〈(1 equiv31-()12nprime-1
J
(21)
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
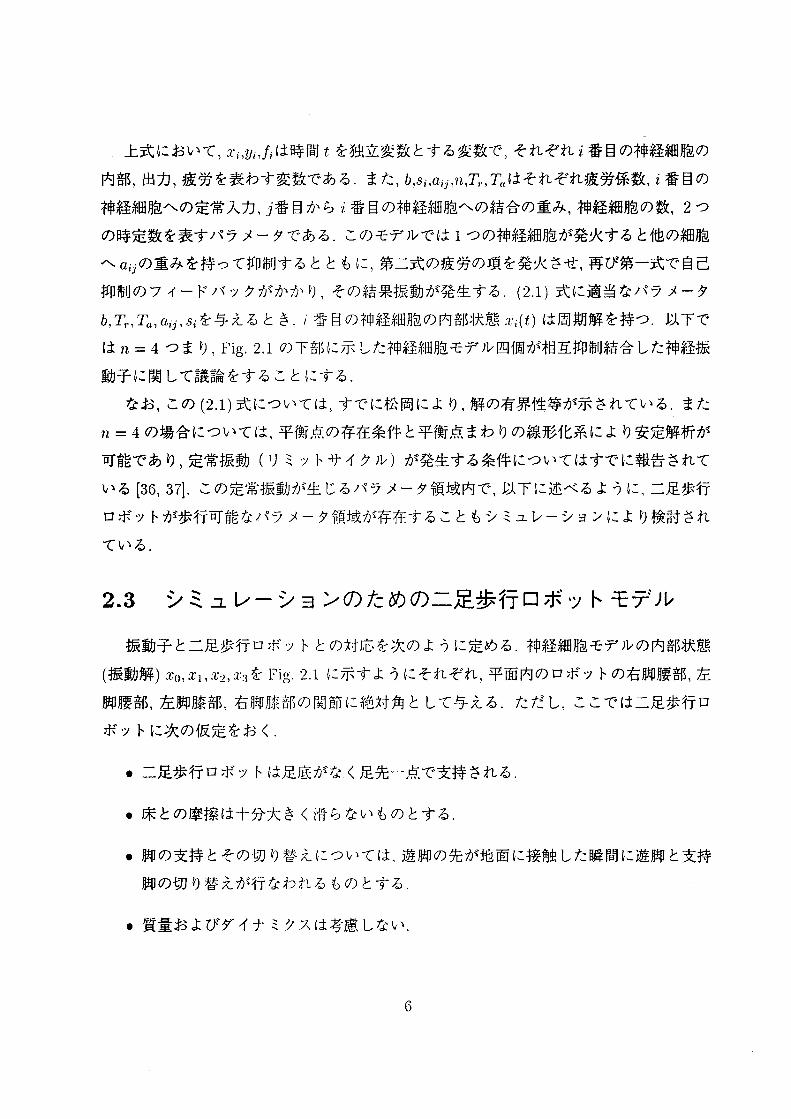
上式においてL7yijは時間tを独立変数とする変数でそれぞれi番目の神経細胞の
内部出力疲労を表わす変数であるまた恒 I(Lij7LTrTはそれぞれ疲労係数i番目の
神経細胞への定常人丸 j番目からi番目の神経細胞への結合の重み神経細胞の数2つ
の時定数を表すパラメータであるこのモデルでは1つの神経細胞が発火すると他の細胞
へ aijの重みを持って抑制するとともに第二式の疲労の項を発火させ再び第-式で自己
抑制のフィードバ ックがかかりその結果振動が発生する(21)式に適当なパラメータ
bTTajS逐 与えるとき番目の神経細胞の内部状態 Lt7(i)は周期解を持つ以下で
はn-4つまりFig21の下部に示 した神経細胞モデル四個が相互抑制結合 した神経振
動子に関して議論をすることにする
なおこの(21)式については-すでに松岡により解の有界性等が示されているまた
n-4の場合については平衡点の存在条件と平衡点まわりの線形化系により安定解析が
可能であり定常振動 (リミットサイクル)が発生する条件についてはすでに報告されて
いる【36371この定常振動が生 じるパラメータ領域内で以下に述べるように二足歩行
ロボットが歩行可能なパラメータ領域が存在することもシミュレーションにより検討され
ている
23 シミュレーションのための二足歩行ロボットモデル
振動子と二足歩行ロボットとの対応を次のように定める神経細胞モデルの内部状態
(振動解)Ilo11I2L7IiをFig21に示すようにそれぞれ平面内のロボットの右脚腰臥 左
脚腰部左脚膝部右脚膝部の関節に絶対角として与えるただしここでは二足歩行ロ
ボットに次の仮定をおく
二足歩行ロボットは足底がなく足先一点で支持される
床との摩擦は十分大きく滑らないものとする
脚の支持とその切 り替えについては遊脚の先が地面に接触 した瞬間に遊脚と支持
脚の切 り替えが行なわれるものとする
質量およびダイナミクスは考慮 しない
6
このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

このロボットに対して振動子が生成した周期解を各関節角に与えると支持脚の位置から
順次各関節の位置が定まりロボットの姿勢が逐次決定されるこれを繰 り返すことで歩
行運動を行わせるしかしながらこのような方法で歩行パターンを生成するにあたって
解71iが収束したり振動をしていても歩行に適していない位相関係を持っていては歩行パ
ターンは得られないそのためには歩行軌道を実現する適当な振幅と位相関係を持った
振動解を持つような神経振動子のパラメータの関係を明らかにする必要があるこれに
ついては26章で述べる
Figule21Corrcsl)011(l(11((()どtllell(-111OOS(illatorvariablestLOtilejointallglesofabipedlocol110tiverobot
24 シミュレーションによる結果
前述の神経振動子と二足歩行ロボットとの関係を用いて歩行軌道をシミュレーション
によって生成したシミュレーションでは刻み幅が001であるRullge-Ⅰくutta法によって
(21)式を数値積分したまたロボットのリンクの長さはすべて 100(グラフィック表現
での便宜上の長さで単位はない)とし歩行動作を次のように定義する
膝は逆に曲がらない
関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

関節角が大きくなり過ぎない
ある程度以上の歩幅がある
遊脚は支持脚を中心にして対称に振舞う
前進する
以上の条件を満たした上でさらに人間が見て歩行と認識できるときにそれを歩行動作と
みなした
Figs22と23はTal)lc21のパラメータを値を用いた時のシミュレーションの結果
であるこのパラメータは試行錯誤によって求めた2つの図はそれぞれ定常歩行パター
ンインパルス状の外乱を腰関節角に印加した時の歩行パターンを表す後者では印の所
で右の腰に外乱が入っているが時間が経つにつれその軌道が元の定常状態に回復 してい
る様子がわかるこれは生成されたリミットサイクルの軌道安定性による結果である
Table21PIlr之1111CrelSillt11eSilllulatiollSttldicsillFigures22and23
れ(0) j(()) (Loi (LlI (L2i (LIST b T Ta
0 037 02 1 0 00 15 17 00 25 10 1201 -0()4 ()18 1() 15 00 00 17
2 -036 ()04 03 00 16 0000
8
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
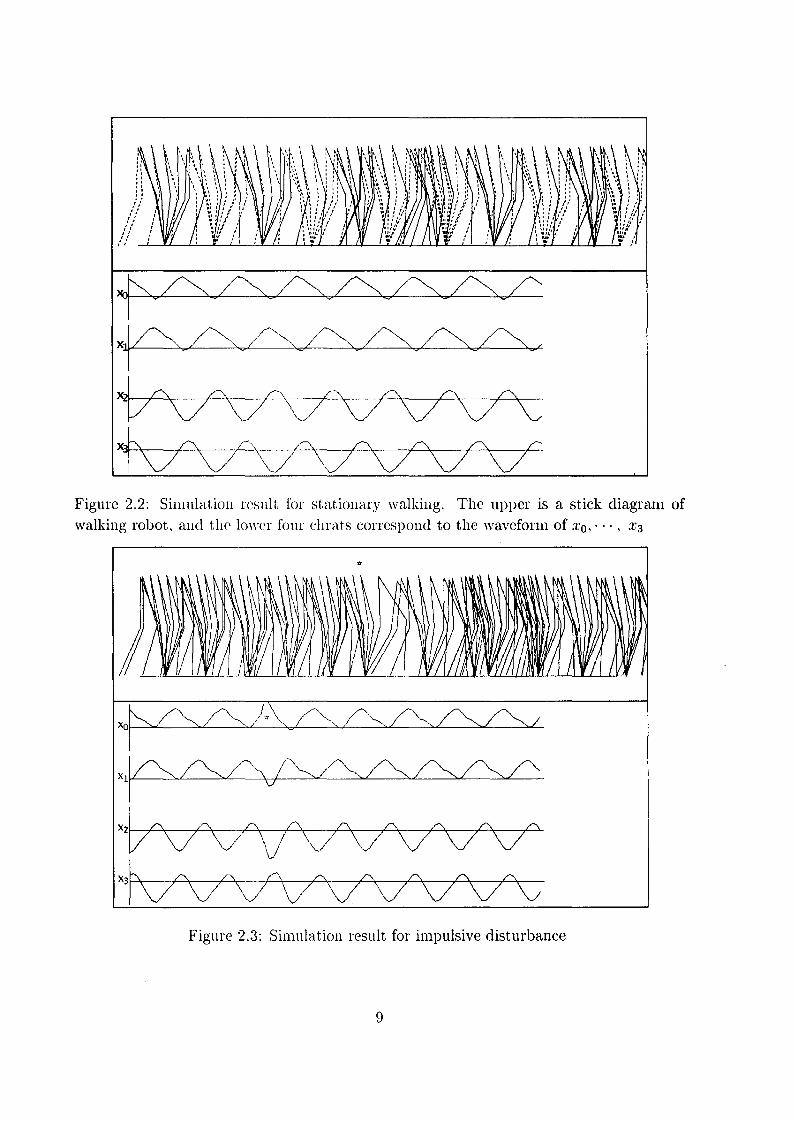
1)tNltJtAiIi5jltttIIIIILtt=荏Iipmこ1tttISILiII~IJIintint一prime iy =諺I-if3Fll 潤 -ifi
花』へヘヘヘへ
Xl一I へヘヘへ
x2I〈 (( ( ( ( (X3L)ノ し )ノprimeヽ prime primeradic ( primeへ ~ヽ primeー
Figllre22SilnulZlfiollleSultfolStatiollalyWalkillgTheupl)erisastickdiaglam Of
walkillgrobotandth(1low(1f()111(111atSCOrlCSl)011(ItothewaveformofL70- ∬3
u
T l
XoX1x2X3 ノthere4prime -
へ radic へ
ノヽヽprime prime primeヽ primeprime へ prime gt V L ノ ノ ノ gt( ヽ primeへ ヽ ヽ primeヽ prime
Fig111e23SilllulatiolllCSultforimpulsivedisturbance
9
25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

25 記述関数法による振動子の解析
24節では試行錯誤によって得られた神経振動子のパラメータを用いてシミュレー
ションを行なったここでは神経振動子が前もって与えた歩行軌道を生成し得る解を発
生するためのパラメータの条件を振動解を仮定することによって記述関数法により求め
るただし振動子の方程式中で設定すべきパラメータは神経素子間の結合を表わす a
のみとする
まず神経振動子の (21)式からjTを消去 してTliに関する二階微分方程式に変形する
ただし関数 g(7)のti-0での徴係数はOと定義 してお くさらにT-i原 と変数
変換 しp-(T+Tt)原 1-TJJ若君 と置いて次の微分方程式を得る
-1砦 +揺 Ii71sumai響
j=0jne71L-i
+sum (LijlJ(tl)+bg(all)-Si-0j-OJneI
ここで節 7I(T)を
i(千)-io+pC()Scent (centi-LL)T+0)
と仮定し(22)式に代入し左辺をU(7)と置 くと次式が得られる
U(t)-(LJ--1)piCOScent+PLJPSillO+sl-alton-I
-1 sum lLljig(Lljo+pjCOSb)J=Ujne1
lL-1
-sum (Ijg(TjO+pj(OScentj)j-0jne7
J)9(70+pI(OScent1)
(22)
(23)
(24)
この式をcoscentおよびsil14の線形結合で表すために非線形項g(1o+pCOScenti)をフー
リエ展開し基本調波で近似する
a(117+pOSbI)聖書 +AllCO沌
現 - j二かI(J(riO+ I)COScent)(lcent1
10
ただし
(25)
(26)
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
ラ二(riO(lt+piSillCL)7T
41 i-Ty(7to+pCOSO)coscentidcenti
言(Ll7OSill0 喜p(Sin 2αiIa7))
((IiEi cos o 71-一芸(l凋 cos 0 -一望 を満 たす根
であるこの近似を用い
(osくわJ - (Oq(LJT+Oj)
- (os(LJT+01-(02-0]))
- (()spprime(S0J+sinゅsill0
sillcentJ - Sill(LJT+OJ)
- qill(LJT+0- (0- Oj))
- sillC)COSOj- COSq)SinOij
(ただし0i-0-0)
(27)
(28)
(29)
などの公式を適用すると(24)式は(Scentとsillcentの線形結合で次のように表わすことが
できる
U(NScentSillOi)-I(Ieoscent+Il三sil14i+Iilt
ただし各係数は次のようになる
71-1-(LJ2I1)p~-b4ト LJ1sumaljAisinang102
j-0jnei
JJ-1-sum tijAJICOSAOTj
j-OjneL m-1Ilこ- 1LJPi+LJ1sum07jA]lCOSangユ0
j-OJneT
JI-1-sum ltAlJsillang蛾j
ノ=UJneprime
-1- 5I- i70- 主意 i町 40- 呈現
11
(210)
(2ll)
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
さらに(210)式が基本調波で平衡 している条件を用いることより次式を得る
1ラ音t1ラ音
27rU(coscentsinゅ)coscentdcent-0
[汀U(cosb7Sinb7)sill紬 -0
1吉宗O
27rU(cosdiSine)i)dcenti-0
これらの式を計算すると結局 (2ll)~(213)式に対応 して次の条件式が得 られる (付
録ユ参照)
Iニ-Il-II7-0 (2117)
(2ll)~(213)(217)式の条件は仮定した解 (23)式の直流項 lTiO振幅 p位相 centと
神経素子の結合係数 IJ疲労係数 (と定常入力 57の関係を表 した線形方程式になるつ
まり適当な alOP i4iI8を(217)式に代入すればこれらを満たす結合パラメータaj
を求めることが可能になる次の節では望むべき歩行パターンを与えて振動子の状態変数
の位相差や振幅周期を求める手法について説明する
なおここで次のことを注意したい関節角に(23)式のような三角関数波を仮定する
ならそれを直接歩行運動の生成に用いて良いと考えられるがこれは実用性を欠 くな
ぜなら歩行のための関節角は軌道安定性を持つ必要があるが実際には歩行においては
外乱が混入する単に(23)式のような波形を仮定 したのでは軌道安定性が成立 しない
ゆえに(21)式のような引き込み現象を示すパターン生成器が必要である
26 歩行パターンの設計
この節ではあらかじめ与えた足先の動作パターン波形から各関節角の満たすべき条
件をもとめ関節角を生成する振動子状態変数の直流項位相差および振幅を求める方法
を述べる
まずロボットの座標系をFig24に示すこのときロボットの初期姿勢が時刻丁-0
で与えられまた遊脚の足先の軌道を図の点線で表わす歩幅を25とし遊脚の足先の∬
座標が支持脚の足先の L座標と同じ位置にきた時遊脚の足先の高さが Hになるとする
12
いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

いま前足を支持脚とすると遊脚足先の座標は次式となる
pal(T) -Px-lsilltlJ-- lsillLllo+lsillIll+lsinT2
py4(T) -PyO-leost73- lcosLllo+I(osill+lcosa2
(218)
一歩の時間は7rLJ(LJは(23)式)であるからT-0と7T2LJのときの拘束条件は次のように
なる
IT(O) - P-S
PJI(())- pTP(7T2J) = ZIP
PI(7T2LJ)-PyO+H
さらに歩行運動では左右の足の動作パターンが対称でありかつ逆位相であると仮定して
=o= 1 β=〝2=〝3
0- 0O - 01-7T 0-0_-03-7r
1-(l(0)+tl(0))2 とprime-(Lt2(0)+I3(0))2
という条件を付加すると(218)~(220)式より次式が導かれる
二
二
二
二
int一別
00ガI引
- eosLlSill(pcosO)+cosIsill(pcoso)
-silH Sill(pcosO)+sitsin(pcoso)
CosiSill(〝SillO)-(osユprimesill(psillO)
sillLSill(psillO)-sillisin(plsinO)
これからpp00を求めると次式となる
〟-〟
(Ln Sil12rl+ (IrCSin2 r 3
ラ
- (1(Silll2r2+ (LrCSln- r 4
0= (I1(Jtall
o= (IrCtan
arCSlnr3
arcSill7l
arCSlnr4
lLrCSillr2
13
ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ただし
2lsil巾-7)
-SsillLl -Ssill7H(os1 H(osユ (223)
であるこの (222)(223)式に対 して初期姿勢 (71)歩幅 (S)と足の高さ(H)に適当
な数値を与えることによって振動子の状態変数の直流項 (L10)振幅 (p)と位相差 (Oi)を求
めることができる
Figul-(214DefillitriollOf(1001dillateSalldvaJliablcs
27 結合パラメータの決定とそれによる歩行パターン
前節の方法によって求められた結合パラメータを用いてシミュレーションを行なっ
た位相振幅直流項 (OiJ)~l~o)の他に用いたパラメータまた今回固定 して用いた初期
14
姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

姿勢の値を以下に示す
ユ2(0)
010 05712 25 037 1001 1003 -004-0362
式(222)に対 して
0=ar c tall
βprime=alCtall
S定常入力
LJ振動波形の角速度
b疲労度の係数
(LJrC Slll r3
(LrC Sill rl
lL11CSill r4
(lrCSlllr)
(224)
(225)
と して0 0の領域 を きく 0lt 号I一等 ltolt 一号とした と き に歩行可 能 な 結合係数
を得ることができた初期姿勢は固定 し歩幅 (STEP)足高 (HEIGHT)を変化させた時
の歩行パターンとその時のパラメータを以下に示す
tt1 lヽ
X1XzX3卜」ノーノ一_ハへへ) V
llprime」ノヘーノヘ_Jへー~ヘJ へJ へへノへ
「lrL ー (( ( ( (
しJノ ノ V J V V
Figure25Walkillg1)attrelllWitllStep-75andheight-10
15
also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

also P1 0 (loz a11l a2l a37
0 0165 0238818 0903012 0 1159421 0632414 -0019667
1 0165 0238818 4044604 1159421 0 -0019667 0632414
2 -0105 0298144 -3815171 1561414 2272858 0 3626626
Table22PalallletelSOftlleSillltllationstudyinFigure25
kHりprimeAprime一AIJi
xonハノradicヽ ( ノ へ primeヽ primeヽレ ー 〉 ー )ヽ し
xV「ノへ rヽ ノ
xz「rlvハ ノ 言 ノハV了
x拾 亘 l只 只 只 只
Figule26Walliillg1)attCl11WitllStep-180alldheight-6
xiO Pi Oi (Lot all a2i a3i
0 0165 0378438 03()0696 0 2081211 0898974 -0997577
1 0165 0378438 3442289 2081211 0 -0997577 0898974
2 -0105 0597850 -3328635 -1041788 -0010777 0 0527909
3 -0105 0597850 -0187043 -0010777 -1041788 0527909 0
Table23Para111CtClSOftllCSimlllatiollStudyinFigulC26
16
さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

さまざまなパラメータの組合せを用いてシミュレーションを行なうことによって歩
行可能なパラメータの範囲を限定することができたその組合せの範囲をFig27に示す
これらの結果より次のようなことがわかった
正常な歩行を得るまでに多少の時間を要す
その時間はFig27の境界付近のパラメータを用いるほど長 くなる
STEPの設定値が大きくなるほどその設定値と実測値との誤差は大きくなる
歩幅を大きくすると腰部の振動子間の結合係数が大きくなりそれ以外は小さくなる
28 おわりに
本章では神経振動子を用いた二足歩行運動の軌道生成システムを表す微分方程式の
結合パラメータの決定方法を提案 した記述関数を用いた神経振動子方程式の解析によっ
て得られた条件式と言旨定 した歩行パターンから求めた位相振幅直流項からそれを実
現する結合パラメータを求めたそしてシミュレーション実験によりその有効性を確認
しまた歩行可能な範囲の限定も行なったこれによりこれまで経験的にしか得られな
かった歩行パターンを前もって指定することができその望む歩行パターンを実現するこ
とが可能になったといえるしかしすべてのパラメータが求められるわけではなく振
動周波数などはあらかじめ固定 しておかねばならずこの段階でも結合パラメータの決定
には課題が残るまたものを跨いだり階段を上がるといった複雑な歩行パターンを実
現する場合は位相や振幅を求めるのが困難になると考えられる
さらに今後初期姿勢や疲労度係数などの他のパラメータを変化させてシミュレーショ
ンを行ない新たな歩行可能な結合パラメータを探索する必要があると思われる
17
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
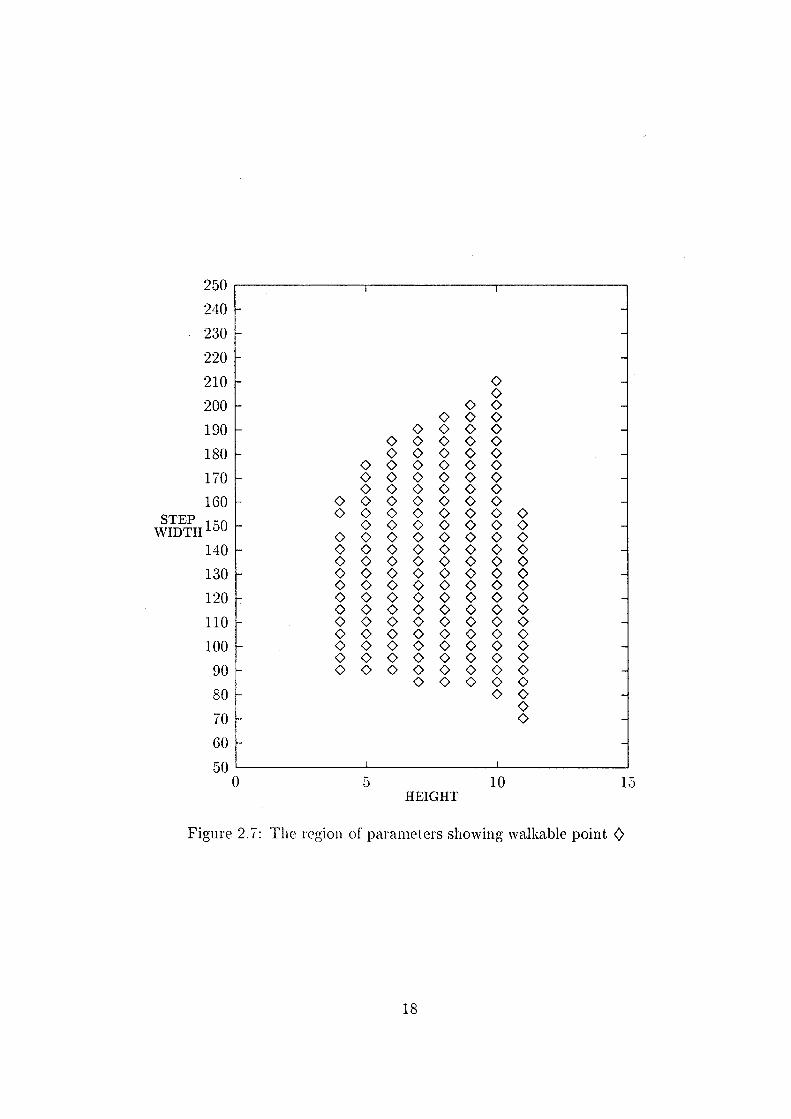
1510
250
240
230
220
210
200
190
180
170
160
WSITDETPHi50
140
130
120
110
100
90
80
70
60
50
HEIGHT
Figule217TllClegiollOfI)a1ameterSSllOWingwalkablepoint
18
第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

第 3章 進化的学習法による
結合パラメータの探索
31 はじめに
本章では神経振動子の結合パラメータの決定に遺伝的アルゴリズムを適用する手法
について述べる 【38394叶 遺伝的アルゴリズムとは自然界における生物の進化モデル
を模倣した確率的探索原理による最適化 探索アルゴリズムであるその一つの特徴 とし
て選択交叉および突然変異という三つの遺伝的オペレータからなる確率的探索原理に
より計算量の多い問題の解を比較的容易に見つけることのできる点がある自然界にお
ける生物の進化モデ)上 すなわち世代を形成している個体の集合の中で環境への適応度
の高い個体が次世代により多 く生き残 り交叉および突然変異を起こしながら次の世代を
形成していく近年では工学における組合せ最適化問題としてジョブショップ問題や人工
生命の研究における生物進化の手法などにも応用されている【41ト
神経振動子にとってはロボットの各関節をうまく操作 し歩行を実現する周期解を発
生すればより良い評価値を得られるようになっている評価の方法としては関節角を用
いた方法移動距離を評価する方法移動距離と関節角を評価する方法の三つを用いそれ
ぞれ比較検討する
32 遺伝的アルゴリズムの概要
遺伝的アルゴリズムはダーウィン的進化論の発想に基づいた生物の適応進化の過程
を模倣 した最適化 探索アルゴリズムであり選択交叉および突然変異という三つの遺
伝的オペレータからなる遺伝アルゴリズムでは各探索点が遺伝子を持つ仮想生物であ
るとみなし探索空間中の探索点を1点ずつ順番に探索するのではなく複数個の探索点
を同時に用いる各個体に対 して環境に村する適応度を計算 し低い適応度を持つ個体を
19
淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

淘汰して消滅させ高い適応度を持つ個体を増殖させて親の遺伝子を継承した子孫を生
成する世代交代シミュレーションを実行するこの際実際の生物の生殖においても生じ
る遺伝子の交叉突然変異と呼ばれる操作を行なうそして最終的に高い適応度の個体
が求まるアルゴリズムをFig31に示す次に遺伝的アルゴリズムにおける各オペレー
タの説明をする
Figl11e31GelleticAlgolizlllll
lt 選択 (selection)gt 集団における適応度の分布に従って次世代に生存する個体群
を確率的に決定する選択は集団の中から個体を取捨選択する
だけで「新しい個体を生成するものではない新 しい個体の生
成は交叉と突然変異によって行なわれる
lt 交叉 (crossover)gt 二つの個体間で染色体を組み換えることによって新しい個体を
生成するもので両親の優れた部分形質をうまく組合わせて千
に継承させることに成功すれば探索における飛躍をもたらす
ことができる
lt 突然変異 (mutation)gt 染色体上のある遺伝子座の値を他の対立遺伝子に置き換
えることにより個体の近傍に新しい個体を生成するもので局
所的なランダムサーチの一種とみなせる突然変異は致死遺伝
20
子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

子を生じる危険性を持っている反面集団として喪失した対立
遺伝子の回復に寄与する場合も考えられ集団の多様性を維持
する上で有効な一つの手段ともいえる
遺伝アルゴリズムの特徴として
解の収束が初期値に依存しにくい
適応度関数の重み付けにより解の収束を変化させることができる
最適解ではない局所解に陥りにくい
等があげられる
33 最適な結合パラメータの探索
前章で述べたようにいままでは振動子のパラメータの決定は経験的に求められてき
たがここでは歩行の様子等から適応度関数を定義しその関数を最大化する振動子の結
合パラメータを遺伝アルゴリズムによって求める方法を提案する
331 遺伝子型の設定
(21)式における結合パラメータの値が 0-10の間の数値をとるとしてその値を2進
数のpbitで規格化して表現 しそれらをFig32のように結合させたものを一つの遺伝子
とする求めるパラメータの数がN個であれば一つの遺伝子の長さはpxNbitsとなる
エ x2凸 --一一一 牡 牛 塑 」
〝bils
FigulC32Mal)1)lllgOfparameterstochromosome
例えば結合係数rlol(lo2(Oiの3個を求める場合N-3となりFig32のXlx 2X3
にaolaO2CL03を割 り当てる
21
332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

332 遺伝オペレータの設定
遺伝的操作の選択にはエリート保存戦略と適応度比例戦略 (roulettemodel)を用いた
エリート保存戦略は集団中で最も適応度の高い個体を次世代にそのまま残すものである
エリート保存戦略により選ばれた遺伝子には交叉および突然変異をしないことにした
また適応度比例戦略は各個体の適応度に比例した確率で子孫を残す可能性がある個体
数が7iノでi番目の個体の適応度がノの時個体iが選ばれる確率1)Selectiは次式で表される
1)15(lCct-fi
sum l=1fj
(31)
次世代に生き残る遺伝子のうち10をエリート保存戦略により90を適応度比例戦
略により選び出したそして適応度比例戦略により選ばれた個体から何組かのペアを交
叉させそれぞれ二つの新 しい個体を生成させ個体総数を一定に保つ交叉の方法は一点
交叉を行なったさらに1bitあたり15の確率で各個体の遺伝子をOから1あるいは
1からOに反転させる突然変異の処理を行なった
333 適応度関数の定義
適応度関数の構成方法として次の 2つの方法を用いた1つめはロボットの関節角度
を評価するものであり2つめはロボットの移動距離を評価するものである以下にこの
2つの方法における適応度関数の定義を行なう
(1)関節角度を評価する方法
二足歩行ロボットが歩行する時の各関節角や歩行の様子に注目して適応度関数Flを
次のように定義 した
Fl- Lulfl+W2fl2+W3f3+W4f4 (32)
Flはfl~f4の条件によって構成されており各条件の詳細を以下に記す
Jl膝が逆に曲がらない条件
腰関節に対する膝関節の相対角が負であれが膝が逆に曲がってしまうさらに
22
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
人間の歩行を模範にして考えると膝関節の相対角はそれほど大きな値をとらな
いと考え0-号程度になればよいとし(33)式で表した
lr Illj1-sumlJ(Llo(t)-Lt3(+))+sum 9(Ltl(i)-12(i))
t=() t=0
j(I-仁 51( (LLOltSILiSlt1()
第一項 右足の膝が逆に曲がらないこと
第二項 左足の膝が逆に曲がらないことを意味する
f周期解を発生する条件
各関節角度は近似的に単振動をしていると考える単振動の式は一般に
r17Ij(i)+ky(i)-0
で表されるつまり
llj(i) k- = -- = con5t
y(i) mprime
U(i+1) 7)(i)
y(i+1) y(i)= 0
(34)
であるしかし(34)式の解y(i)が振動解を持たず収束してしまう場合つまり
b(i)equiv0でも(36)式は成 り立ってしまう従って収束する時は b(i)20で
あるから解が振動するためにはl狛 )lが十分大きい必要があるこれより神
経振動子の内部状態が振動解をもつ条件を(37)式のように表す
i 舌 Q匪(川f2-sumsum
totU(Pi(i+1)-P7(+))2+Q
P(i+1)-it2(i+1)
7)(i+1)-TiO
f3各関節が曲がり過ぎない条件
一(38)式で表される各関節角度はあまり大き過ぎては歩行パターンになり得
23
ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ないので一号~号程度の間の値をとるように設定 したまたこの条件を満たさ
ない遺伝子には死滅するようなペナルティを与えるようにしてある
(7i(i))-
llT
f3-sumsum II(Ltli(i))Z=Ot=01 ト音≦∬潮 ≦号)
-5000 (ttli(i)lt一昔昔ltall(i))
f4左右の腰と膝の関節角が逆相である条件
歩行においては左右の腰及び膝の関節角の時間変化はお互いに打ずれている
ため (39)式のようになる
圭 ()い=sum
+sum
tも(~o(+)+tt1(i)-L700-Ll10)2+Q
tL ()tTo(Lt2(i)+Lt3(i)-120- 130)2+Q
栄-項 腰関節が逆相である
第二項 膝関節が逆相であることを意味する
但 し
xi(i) 時刻 tにおけるロボットの関節角度
aiO ali(i)における直流分
wL 重み係数
T シミュレーション時間
Q 01である
(2)移動距離を評価する方法
i-0-3k-i -4
(39)
適応度関数をロボットの歩行条件のうち前進するという条件から以下のように構
成する
F2- W5f5+u)6fG+wTf7+W8f8
24
(310)
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
f5ロボットの腰関節位置の移動距離
f5-Gal(T)-Gl(0)
fGロボットが常に前進する条件
7-
fG-sum L(Gl(i+1)-Gal(i))J=0
L(u)-1 (u≧o)
-50 (ult0)
J7ロボットの腰関節位置の上下運動の制限条件
71
j7- sum h(Gy(i)-Gy(0))J=U
坤 J)-1 (-10≦u≦10)
-50 (LLJlt-1010ltu)
f8ロボットの膝関節が逆に曲がらない条件
rr Tfs-sum 9(1O(i)-ユ3(i))+sum 9(a1(i)-T2(i))1-O l=0
y(LL)- 1 (0≦u≦昔)
-50 (ult0iltu)
ただし上式で
Gc(i) 時刻 tにおけるロボットの腰関節al座標
Gy(i) 時刻 tにおけるロボットの腰関節 y座標
Ti(i) 時刻 tにおけるロボットの関節角度
wk 重み係数
T シミュレーション時間である
25
i-0-3k-5-8
(3ll)
34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

34 シミュレーションによる結果
シミュレーションをするにあたりロボットのリンクの長さをすべて100としたまた
神経振動子の内部状態および疲労度の初期値および時定数はTable31の値を使用し1回
の歩行を行なうシミュレーション時間は40サンプリング時間を001とした
Ta1)lc31IllitialvallleSforthesilllulatioll
1(0) f7(0) Tr T
() 037 020 10 1201 ---()04 O18
2 -036 004
341 結合パラメータの最適化探索
二足歩行運動が左右対称な運動であることから結合パラメータも左右対称であるとい
えるこのことを考慮すると未知な結合パラメータは6個となる各 atjを12bitsで表す
ので一個の遺伝子の長さは12times61)itsとなる個体総数は20個とし1500世代まで探索を
行なった定常人丸 疲労度係数の値はそれぞれso(-sl)-10S3(-S2)-03b7-25
とした
(1)関節角度を評価 した場合
適応度関数に (32)式を用いて結合パラメータ6個を探索 したただし(32)式の
重み係数を(wlW2W=1W4)-(05120510)とした各世代で一番高い適応度と
適応度の平均値の世代に対する変化をFig33に示すさらに150世化 400世代
600世代1250世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった
各 aijの値をTable312Table313 Table314Table35に示しそれぞれの値を用
いて得られた歩行軌道をFig34Fig35Fig36Fig37に示す
26
fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

fitness
22000
20000
18000
16000
14000
12000
10000
8000
6000
4000
2000
一equiv重責hellip j章 Iー
t IZt lI描ll話J l 量if ii 潤equivlilー
1 l
Ir
equiv
maXlmum
average
00 500 1000 1500generation
Figure33PelforlllalleeOftllelllaLXillllll-ialldaveragefitnessaquiredbyestimatingtlle
joilltallgles
27
Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

Table32PalamCtelSWitllthenlaXilnumfitlleSSat150thgeneration
aoi lL1i ll21 a3i
0 0000000 1208791 1247863 0000000
1 1208791 0000000 0000000 1247863
2 0012210 0251526 0000000 0603175
Table33ParalllCterSWitlltilelllaXi111ulllfitneSSat400thgelleration
aoi CL11 (I2r (L3i
0 0000000 1196581 1873016 0000000
1 1196581 0000000 0000000 1873016
2 0000000 0310134 0000000 0937729
3 0310134 0000000 0937729 0000000
Table34Palal-letelSWitlltrllClllaXilllulllfitlleSSat600tllgeneration
(LJOi (I1 (L_) a3t
0 0000000 15873()2 1873016 0000000
1 1587302 0000()0() 0000000 1873016
2 0000000 2341880 0000000 2498168
Table315ParallletClSWithtllClllaXilllumhtllCSSat1250tllgeneration
ao1 (Ll (Lprime2i a37
0 0000000 1562882 2185592 0000000
1 1562882 0000000 0000000 2185592
2 0000000 2495726 0000000 2498168
3 2495726 0000000 2498168 0000000
28
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
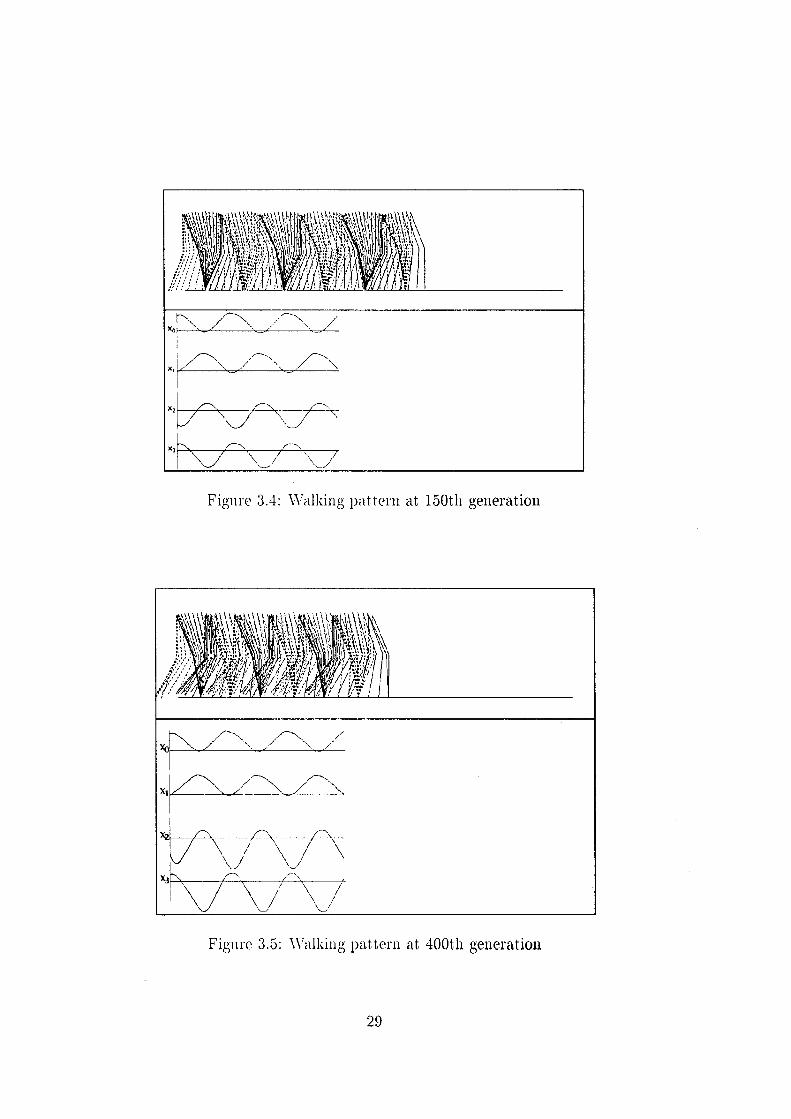
Figlllで34Walkillg1)州cl11at150tllgelleratioll
卜_ノへ__l
xlprime-へ-へ
Fig1ue35WTllkillg1)aftel11at400thgeneratioll
29
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
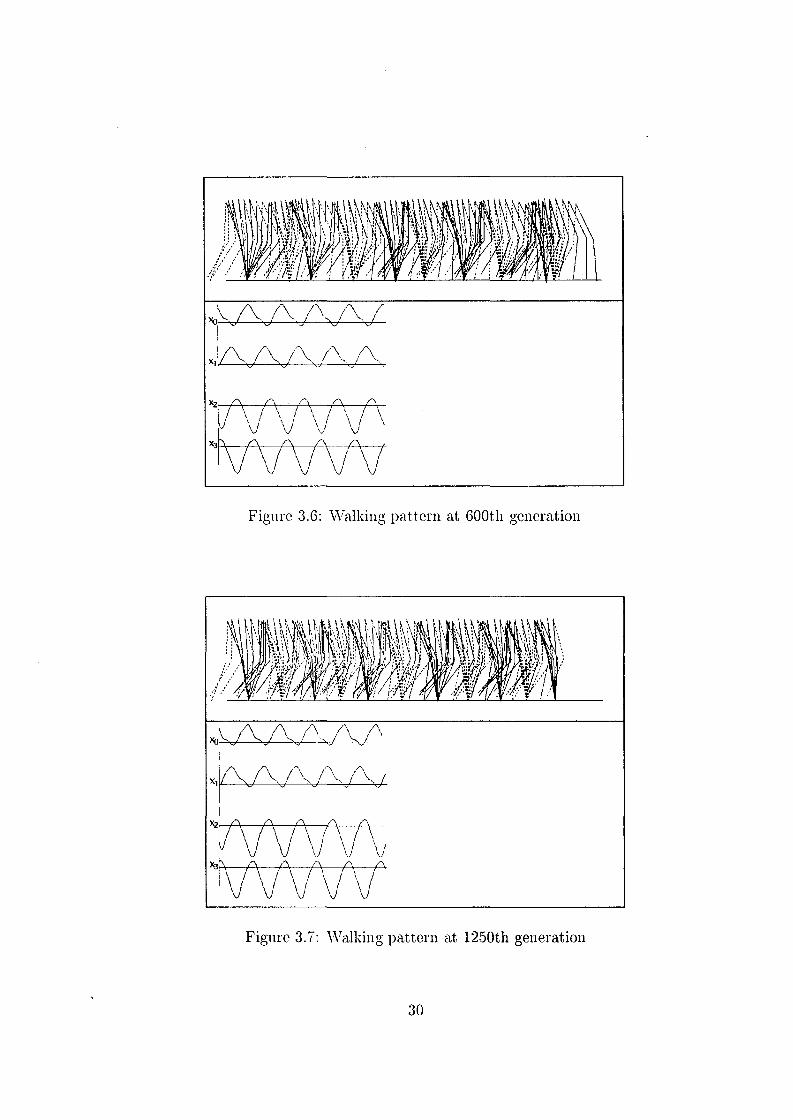
卜andandノJへノ
xtハノ _ ーノ「
【転 7(JJ(Vへ
Figure36Walkillgpatternat600tllgeneration
掛
牟 プ A A f
xprime八 八 prime一八 prime
x2b-V(ortJVハUX3ノ
FigulC37Walkillg1)attClnat1250thge11elatio11
30
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
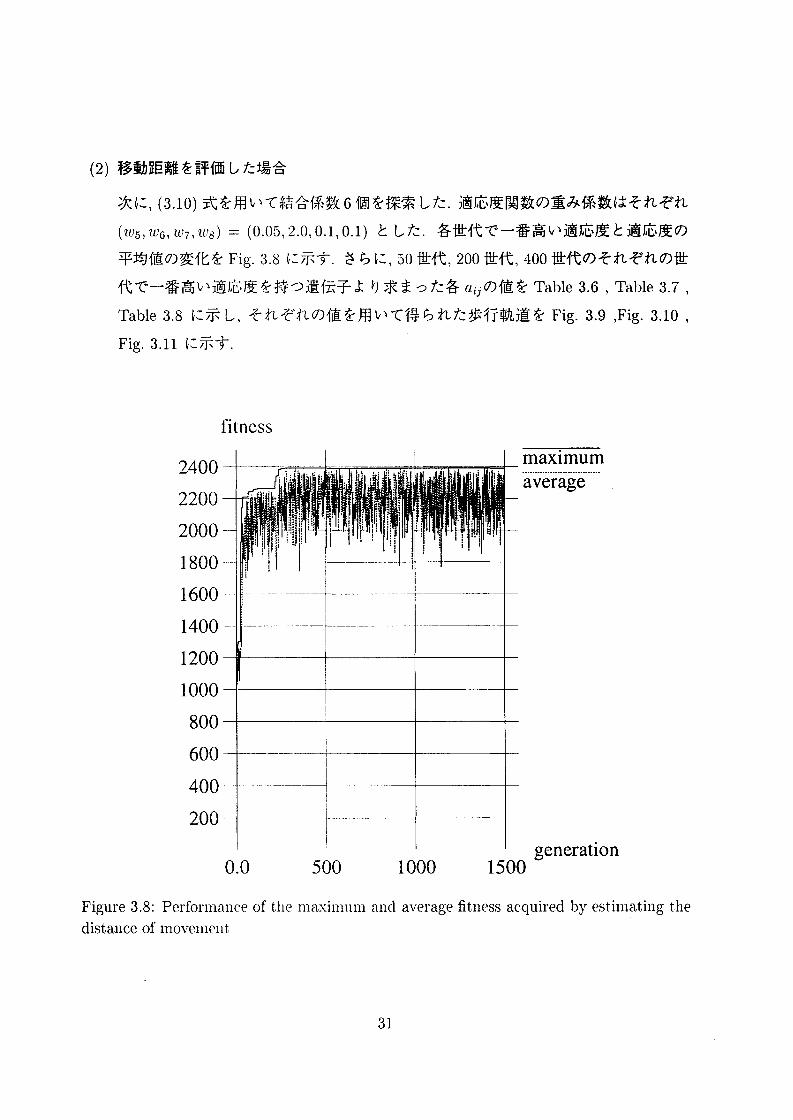
(2)移動距離を評価 した場合
次に(310)式を用いて結合係数6個を探索した適応度関数の重み係数はそれぞれ
(W5W6WTltprime8)-(005200101)とした各世代で一番高い適応度と適応度の
平均値の変化をFig38に示すさらに50世代200世代400世代のそれぞれの世
代で一番高い適応度を持つ遺伝子より求まった各 a7jの値をTable36Table37
Table38に示しそれぞれの値を用いて得られた歩行軌道をFig39Fig310
Fig311に示す
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
0
00
b
4
つん0
00
angU
4
2
つム2
2
1
1
1
1
1
鮎lttは ヰ iJhelliplI撮甜 窓7fI
_l
I一緋 Pi-書 辛II
i lI J判 削 -fhellipIlH i I1】
【
int
i】
11i)
maXlmum
average
00 500 1000 1500generation
Figure38Perfollnall(COftllemaXill川malldaveragefitlleSSacquiredbyestil-1atillgtrhedistallCeOfmovelllellt
31
Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

Tables6ParameterswithtllCmaXilnumfitnessatbothgeneration
a021 (t1i (I2I (L3i
0 0000000 0810745 0781441 0000000
1 0810745 0000000 0000000 0781441
2 2510379 0097680 0000000 3125763
3 0097680 2510379 3125763 0000000
Table37ParalllCterSWitlltllClllaXimumfitnessat200thgelleration
(tol (I11 (I2 (L131
00000000 0813187 0625153 0002442
1 0813187 0000000 0002442 0625153
2 2537241 0107448 0000000 2500611
3 0107448 2537241 2500611 0000000
Table38ParalrlCtCrSWitlltllCmaXilnumfitncssat400thgeneration
ao1 (Lli (L2 a3i
0 0000000 1123321 0937729 0002442
1 1123321 0000000 0002442 0937729
2 0639805 0109890 00()0000 2539683
3 0109890 0639805 2539683 00000003
袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

袖P )~L)-xhellipヽ ノ(
「ノ ノ
FigulC39W alkillgI)attCrnatBothgeneration
和F t V
xtL し primeヽ
x2b 八 ノ- l
Figule310Walkillgpatternat200thgeneratioll
33
鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

鮎尽
粕 へ へ-
x号へ_intへ
FigulC311WalkillgPattCru at400tllgenelatioll
342 結合パラメータ定常入力疲労度係数の最適化探索
次に結合係数 (Ltjが 6胤 定常入力 57が 2イ臥 疲労度係数bIが 2個の計 10個を探索
した関節角度を評価する(32)式を用いた場合(37)式が発散 してしまいパラメータを
求めることができなかったまた移動距離を評価する式 (310)を用いた場合も各関節
角度が発散 してしまいパラメータを求めることができなかったそこで式 (310)に各関
節角度の制限を加え次式のようにした
F3-AxF2
A-(三 (t(tlilt5_TitiltSxT(
(315)
Aは各関節が曲が り過ぎないように制限したものでありすべてのT(i)に対してシュ
ミレーション時間中に一号≦L7i(i)≦昔であれば A- 1なければ -4-0となる関数で
ある各関節角度が一昔≦Ll7(i)≦号とならない遺伝子は死滅させるものである適応
度関数の重み係数をそれぞれ (W5u76W7LL8)-(005200101)とした個体数 200
1個のパラメータを GbitSで表 したので遺伝子の長さは 6times10bitsである各世代で
34
一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

一番高い適応度と適応度の平均値の変化をFig312に示すさらに40世代60世代
840世代のそれぞれの世代で一番高い適応度を持つ遺伝子より求まった各パラメータの値
をTable39Table310Table311に示 しそれぞれの値を用いて得られた歩行軌道を
Fig313Fig314Fig315に示す
fitness
4000
3500
3000
2500
2000
1500
1000
500
00
Er玩1iT
lIli l王 弓F
一intIl ー
(
-【
I11ll
トーIi
maXlmum
average
00 500 1000 1500generation
Figure312PcrforlnallCeOfthelnaXimumalldaveragefitnessacquiredbysearchingallparameter
35
Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

Table39ParalllCterSWiththelllaXimum 丘tnessat40th
S bI aoi ali a2i a3i
02187500 5625000 0000000 1250000 1250000 000000
1 2187500 5625000 1250000 0000000 0000000 1250000
2 0156250 0937500 0000000 0000000 0000000 0312500
3 0156250 0937500 0000000 0000000 0312500 0000000
Table310PalamCtClSWitlltllCmaXimumfitlleSSat60tl11gelleratinsi I) (Lot ali (L27 a37
02187500 5625000 0000000 1406250 1250000 0000000
1 2187500 5625000 1406250 0000000 0000000 1250000
2 0156250 0468750 0625000 8125000 0000000 5000000
3 0156250 0468750 8125000 0625000 5000000 0000000
Table3llParalllCterSWit11tllelllaXimumfitnessat840thgeneration1i I) 0ol a17 a2i a3l
0234375 640625 0000000 1406250 1250000 0000000
1 234375 640625 1406250 0000000 0000000 1250000
2 015625 000000 0625000 7187500 0000000 5156250
36
-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

-ILJ〉b
1 ヽx2一primeprimeJLX3
FigulC313WalkingpatLtCrnat40thge11eratioll
卿
rt
担 angゝ払AJItx2 一十X3
Figure314Walkingpatternat60thgeneration
37
-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

-
粕 and
x )八)capI【x2Vノ X3
Figure315WalkillgPatternat840tllgeneratioll
35 結果に対する考察
この節では神経振動子の結合パラメータを探索するために関節角の評価移動距離の
評価関節角および移動距離の評価による3つのシミュレーションをおこなった結果につ
いて考察を行なう
まず3つのシミュレーションにおける腰関節位置の移動距離の変移をFigtlle316に
示すこれは各世代ごとに得られた一番高い適応度を持つ歩行パターンを選びその移
動距離を測定 した
341節でのシミュレーションでは関節角度を評価する適応度関数を用いて結合係数
の最適化探索を行なった15()世代では滑らかな振動波形を得ることができた(32)式
は関節角度の角速度が速いほど適応度が高 くなる関数であり(37)式の 困t)lの影響に
より世代を経るにつれて歩数は増えているしかし腰関節と膝関節の関係は膝が逆に曲
がらないという以外制限していないので移動距離が延びないことがFigure316よりわか
る1500世代を通して 150世代で得られた歩行パターン(Figure34)がより自然な歩行
パターンであった
38
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
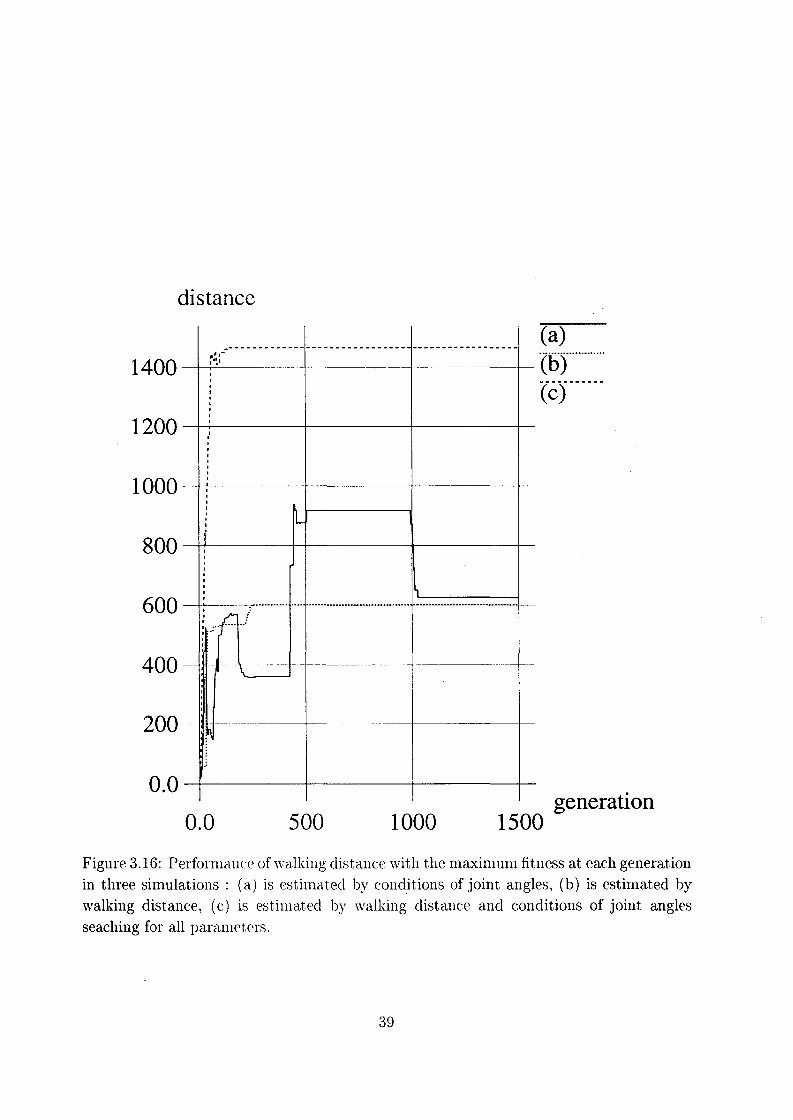
distance
II-l
一lIlIIII
ilIIIllll
IllIllll一
一
00 500 1000 1500generatlOn
Figure3116Perforll~lall((-Ofwalkillgdistancewitllthemaximumfitnessateachgeneration
inthreesimulatiollS(a)iscstimatcdby(011ditio11SOfjointangles(b)isestimatedby
walkingdistallCe(C)iscstilllatedl)ywalkingdistallCeandconditionsofjointangles
seachingforallparalnetClS
39
次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

次に移動距離を評価する適応度関数を用いて結合係数の最適化探索を行なった神経
振動子が振動解を発生する可能性を持っているためロボットが前進することに重点をお
いて評価することによって歩行に適 した周期解を得ることができたさらに世代を経る
につれて移動距離も増えていった適応度が高 くなるにつれて歩行パターンも良くなった
342節では移動距離を評価する適応度関数に関節角度の制限を設けて結合係数定
常入力疲労度係数の 10個のパラメータの最適化探索を行なったただし解の組合せ
が多 くなったため 1個のパラメータを6bitsで規格化することにより探索空間を狭めた
さらに初期集団の形成においてより良い遺伝子を作るために個体数を200個とした定
常入力の値が定まっていないので定常入力の値が大き過ぎると関節角度が発散 してしまっ
たこのことより定常入力は関節角度の振幅つまり歩幅に大きく影響するといえる
歩行パターンを生成する神経振動子システムの結合パラメータだけを探索するならば
一つの遺伝子の長さは72bitsで探索の幅は000242の値で十分であったしかし結合パ
ラメータ定常入力疲労度係数を探索する場合には一つの遺伝子の長さは 60bitで探
索の幅は015625(1026)きざみが限界であったこれ以上細かく探索を行なっても歩行パ
ターンに変化がおこらず適応度が変らないからである
また三つのシミュレーション結果から結合パラメータα21α30がそれほど大きな値
をとっておらず歩行パターンの生成に関して関与が小 さいと思われる定常人丸 疲労度
係数とも腰関節より膝関節部分の方が小さいことが各パラメータのTableよりわかるし
かしながらどのパラメータが二足歩行ロボットのどの動きに影響するかは詳しく分から
なかった
36 おわりに
本章では神経振動子系を用いた二足歩行運動の軌道生成システムを表す微分方程式の
パラメータを決定する方法として遺伝的アルゴリズムの適用を提案 した
定常歩行に関しては構成 した適応度関数に沿ってさまざまな歩行パターンを生成する
パラメータを求めることができることをシミュレーションによって示 したこれによって
今までは試行的経験的に求めてきた各パラメータの値を自動的に決定できる方法が提莱
できたといえるさらに今回構成 した適応度関数に歩幅速度等の制限を加えることに
よって望むべ き定常歩行パターンを生成するパラメータの値を求めることができるであ
40
ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ろう
しかし階段の上 りや下 り等の非定常歩行に関しては今回構成した適応度関数では求
めることができなかった今後の課題として非定常歩行のパラメータ探索さらには神
経振動子系を用いずに遺伝的アルゴリズムだけで歩行パターンを生成する方法を考える
ことが挙げられる
41
第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

第 4章 小型二足歩行ロボットの製作と歩行実験
41 はじめに
2章で提案 した手法は軌道生成に重点をおいており単純な構造を持った神経振動子
によって生成される軌道を計算機上の二足歩行モデルに適用してきた現在振動子や神
経振動子を用いで歩行運動を生成する研究は様々に行なわれているが計算機上のモデル
について述べているものが多い本章では提案 した神経振動子による二足歩行運動の軌
道生成法を製作 した小型二足歩行ロボットに適用した実験について論じる【42ト
一般にロボットの制御を行なう時動力学方程式を解 くことによって運動制御を行な
うことが多 く実機に適した制御が行なえる利点があるその反面多自由度を持つロボッ
トの動力学方程式はパラメータを同定することが難 しく計算量も多 くなるそこで振
動子の周期安定性に注目して歩行系の動力学方程式を扱 うことなく歩行システムの構築
を試みたなお同手法を用いて神経振動子による四足歩行ロボットの同歩行の実現は既に
なされている【43】
製作 したロボットはラジオコントロール用のサーボモータを用いて構成されており
振動子の内部状態がサーボモータの目標動作角となるすなわちロボットを含むシステ
ム全体としては軌道生成部から制御部に対して生成された各関節の目標角が与えられる
フィードフォワードとなる
以下42節では製作についての概要と制御についての概要を述べる43節では生成さ
れた軌道を用いた二足歩行ロボットの歩行実験について述べる
42 小型二足歩行ロボットの製作
26節において提案した手法によって決定される神経振動子のパラメータを用いて軌道
生成を行ないその有効性を小型二足歩行ロボットにより検証する製作したのは左右の
腿膝および足首の駆動部を持った6自由度のロボットでそれをFig41に示すただし
42
腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

腿と膝は矢状平面 (sagittal1)lalle)内を動作 し足首のアクチュエータはロボット全体を
sagittalplalleに垂直でかつ水平面に垂直な平面 (laterall)lalle)内で動作させるただし
軌道生成はsagittal1)lalle内のみにおいて行 うため足の振 り上げにより生 じる回転モー
メントをできるだけprimeJさくするために足底部分は帽が広 くしロボットをsagittalplame内
に拘束しやす くしているこのロボットの仕様はTal)lc41に示す
軌道計算にはマイクロコンピュータを用い生成された各関節の目標角度が DAボード
を介 して出力されPWM 回路に入力される (付録 2参照)サーボモータはPWMパル
スのデューティ比で動作角が決定される現在のところエンコーダなどの角度センサは用
いておらずロボットから計算機への位置や速度などのフィードバ ックはないしかしサー
ボモータ自身が目標値に対 し位置フィードバックを行う電子回路を実装 してお りそれに
よって目標値への追随性は十分である
Figure41TllCeT(1)Primellt11110borwith6(legreesoffreedom
43
Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

Tablc41PalnllleterS()fl0botalldspecificationofactuator
lleigllt lcllgrhof lellgt110f
43 神経振動子を用いたロボットの歩行実験結果
製作 したロボットに対 してFig22のシミュレーションでの軌道を与えて実験 したと
ころ歩行には成功 しなかったこの軌道では重心がsagittal1)1a11e内において十分に支持
脚上に乗 り切らなっかたことが原因として考えられるそこで26節で述べた手法を用
いて製作 したロボットに適した歩行パターンを生成する神経振動子を構成したここで
はパラメータは各リンク長 10()に対 して歩幅を180足先の最大の高さを6として求めた
Table42のものを用いたその他のパラメータはTable21と同様のものを用いた
Tabl(I42PiuillllH(llSillIll(tSilllllliltiollS上ll(liesofFi 42
~U )I Oi (Lot (L111 (L2i 03i
0 ()165 0210 0563 00 1296 0922 0034
1 ()163 ()21日 370 1296 00 0034 0922
2 -()16こ) ()302 -3518 ~1508 2222 00 2370
まずシミュレーションによる各関節角度と歩行の様子をFig42に示すさらにこの
各関節角パターンをロボットに適用し歩行実験を行なったただし神経振動子が生成す
るのは左右の腿と膝の角度のみであるため足首アクチュエータに対する目標値はシミュ
レーション時に前もってロボットの重心がlatclIllplalle内において支持脚の足底にのる
ように計算 してお くこの実験結果をFig43に示す実現された歩行は歩幅が約 14cm
で一歩は約 5sccである振動子から生成された軌道はsagittalplalle内に固定されただ
けのものであるが今回の実験では1nttelal1)lallC内におけるロボットの重心を足首のア
クチュエータによって左右の支持脚への移動することによって歩行を実現したまた歩
行の安定性を得るために足底を広 くし上体を進行方向へ傾けてロボット全体の重心を前
にずらすという工夫が必要であったが今後足首の機構を強化し蹴 り効果を付加するこ
とによって多様な歩行にも対応できると考える
44
ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ヽltll IIlprime一primeprime primeiJII GI-FIIprime
よさノハ へprime _rprime prime
X1prime ( _prime prime prime
x2ll(へ( ( ( ( (
X3L ノJ ノ ノ ノ ノprime~- ( r へ へ 一 (
Figure42SimlllatiolllCSultfolStaliollalyWalkillgWiththeparametersobtainedbythelllethodin26
- walkingdirection
Figure43Stroboscol-icview(6stcl)S)ofwalkillgOfexpelimelltalrobotwiththeparam-etersobtaimedbvthemctho(Iill26
45
44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

44 階層型軌道生成システム
神経振動子を直接利用する形式ではないが従来から提案されている二足歩行ロボッ
トの軌道生成法として倒立振子方程式とホップフィールド形ニューラルネットを階層型
に組み合わせた階層型軌道生成システムが提案されている[44]この節ではこの手法を
実験に適用し[47】併せて神経振動子の場合と比較した
階層型軌道生成システムはFig44で表されるこのシステムではロボットの重心と
支持脚からなるモデルを一点支持の倒立振子とみなしているそして倒立振子方程式に
重心の移動距離と移動速度を入力することにより次にロボットが脚を着 く地点を求める
ことができるさらに重心位置と支持脚位置と求まった着地位置からホップフィールド形
ニューラルネットを用いてロボットの逆運動学を解きロボットの各関節の軌道を求める
以下で各項目について説明する
Robotstrajectory
Figure44Blockdiagram ofthetrajectorygenerationsystem
46
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
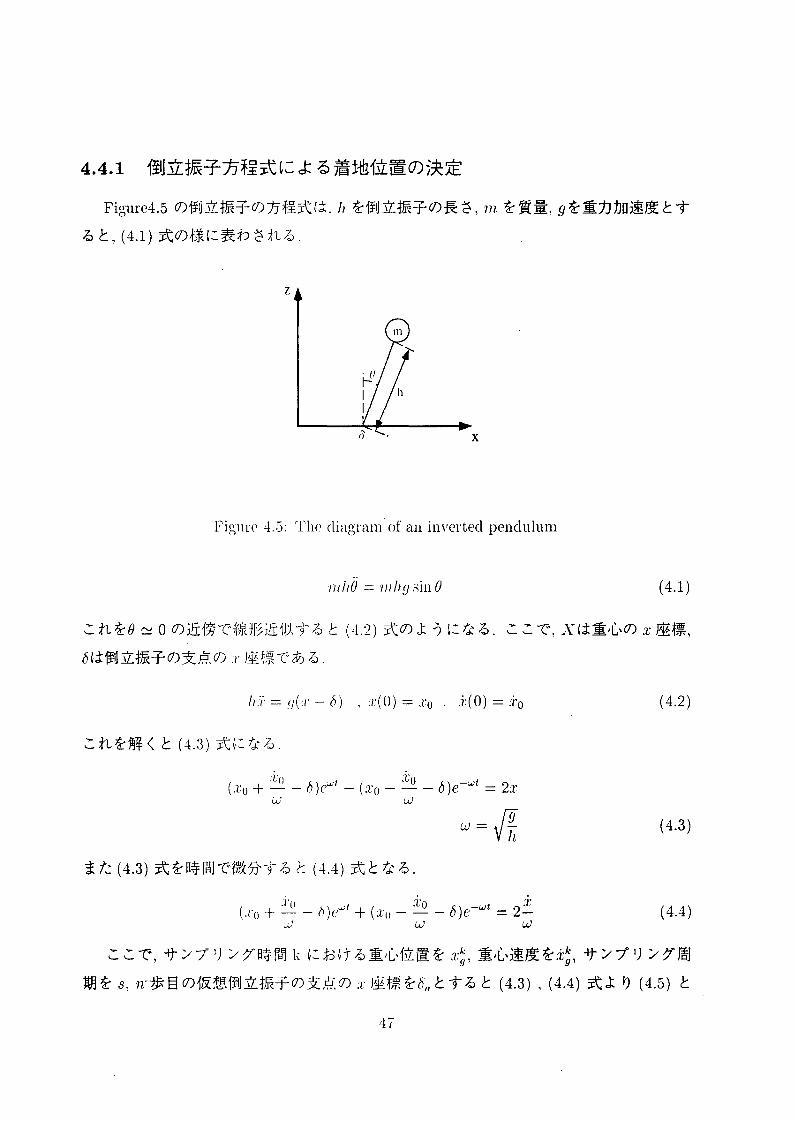
441 倒立振子方程式による着地位置の決定
Figure45の倒立振子の方程式はItを倒立振子の長さmJを質量gを重力加速度とす
ると(41)式の様に表わされる
FiLlllr(45Tll(-(li~lgral110fallillVCrted1)Clldululll
IIIIO- 1JII(JSillO (41)
これを0竺0の近傍で線形近似すると(42)式のようになるここで方は重心の I座標
partは倒立振子の支点の J座標である
ht-- J()-a)I(())- iOLi(0)-Iio
これを解 くと(43)式になる
(U+聖 lb)e-I-(L7(一堂 -6)e-〕t=2LtLJ LJ
---TIまた(43)式を時間で微分すると(44)式となる
(tlO+坐 -A)C-int+(i()一聖 -part)e-wt=2三LL LJ LJ
(42)
(43)
(44)
ここでサンプ リング時間 1日こおける重心位置を甘 重心速度をtiiサンプリング周
期を S7T歩目の仮想倒立振子の支点の I座標を6日とすると(43)(44)式より(45)と
47
(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

(46)式が求まる
2LTか 1-(t境+
2
-part-1eLIS車 要 一 6-1e-W-
-a_I)e〕S-(LillAJt一室 16nll)e-uSLJ
Fiyll(I4GPositi()ll()faswlllglllgleg
また現在のサンプリング時間における重心位置 (Ltil)などを(45)式に代入すること
によって1サンプリング時間後の重心位置 (需1げ 得られるしかし実際にシミュレー
ションを行なうとシミュレーションによって得られた重心速度が目標値よりも大きくな
り実際の重心速度をそのまま代入した場合には次の重心目標が速度をさらに増加させ
ますます重心速度が大きくなるそこで1サンプル時間前に(46)式より求めた重心速
度の目標値を(45)式に代入して1サンプリング時間後の重心位置求めることにしたま
た本システムにおいてロボットの遊脚の足先の軌道はFig46の様に楕円軌道で補間し
てもとめているそのためには 1歩後の着地位置をもとめなければならないそこで現
時点の重心の位置と速度から二歩後に重心が目標位置に目標速度で到達するように一
歩後に足を着 く位置を定めるFig47において(A)の状態がロボットの現時点の姿勢と
しその重心の位置を範 卜 1速度をi〟primeー 1とする次に遊脚が着地する時刻 (Bの状態)で
48
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
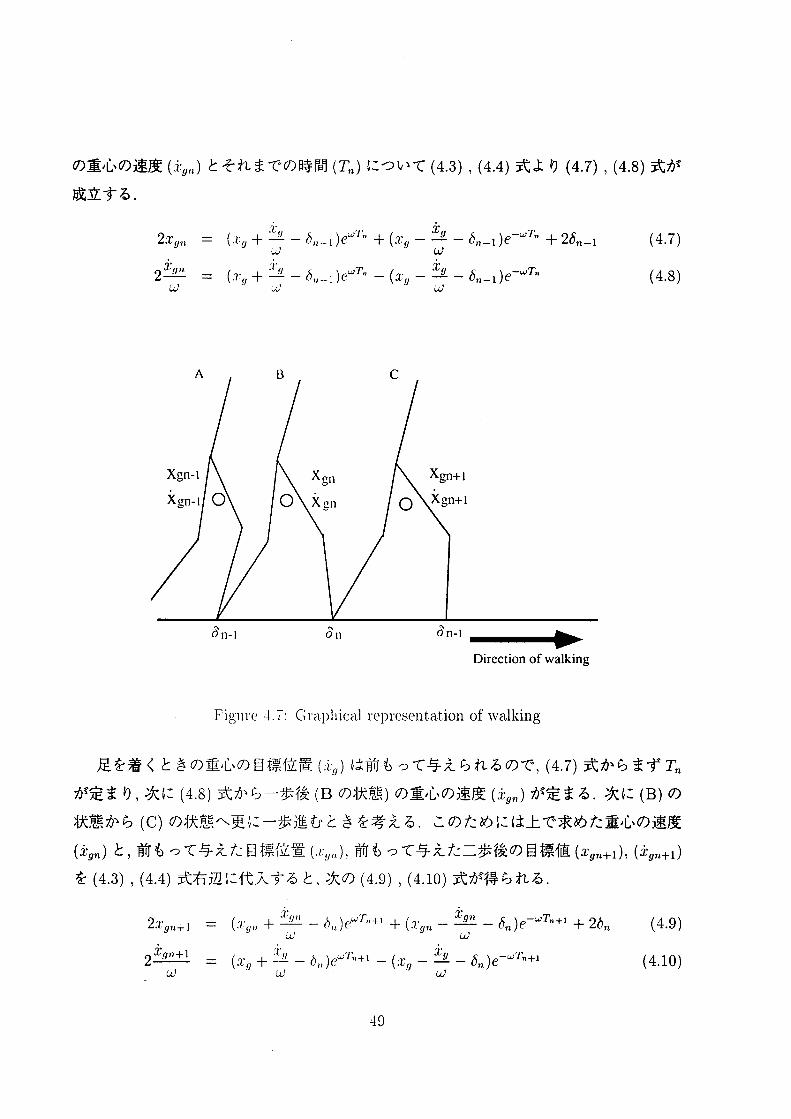
の重心の速度 (ign)とそれまでの時間(T)について(43)(44)式より(47)(48)式が
成立する
2al〟 i - (tg包 -n-i)euT7(Ll9-慧 --1)e-JT1 2n-1 (47)LLJ
2禁 と - (7tJ包 IhI-I)e〕T-(Ll〟一票-6-1)e~WT7
partn-1 partn partn-1 equivDirectionofwalking
(48)
FiglueiIGlal)hi(alrel)reSelltatiollOfwalking
足を着 くときの重心の目標位置 (i9)は前もって与えられるので(47)式からまず Tn
が定まり次に(48)式から一歩後 (Bの状態)の重心の速度 (Lilgn)が定まる次に(B)の
状態から(C)の状態へ更に一歩進むときを考えるこのためには上で求めた重心の速度
(ign)と前もって与えた目標位置 (rty)前もって与えた二歩後の目標値 (t7gn+1)(ign+1)
を(43)(44)式右辺に代入すると次の (49)(410)式が得られる
2Llgn+1 - (L9prime十色 -a)(JJ+(tTg一望由 一partn)e-〕TTLl+26m (49)LL) LJ
2竺星空plusmnLJ - (範 十色-a)chlTI -(ll9一票 -bn)e一山Tn1 (410)LJ
49
この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

この2つの式から一歩後に足をつ く(B)の状態の足先位置 (6)と(B)の状態から(C)
の状態に要する時間 (T+1)が求まる以上により1歩後の着地位置partnとそのサンプリン
グ時間Tnが定まるこの6とTと楕円軌道により各サンプリング時間における遊脚の足
先位置が求められる楕円軌道については次の式で表される
Iん+i- ltL+S(a-Lllk)
T(4ll)
ただしallはサンプリング時間 んに置ける遊脚足先のL座標を示す=座標は T~7平面にお
いて遊脚が1歩前の着地位置partprime_2と次の着地目標位置bnとを結ぶ直線が長軸となる楕円
軌道を措 くように(412ト 甘 13)式より求められる
zL+I-匿 云
L - 2L_
(占+6_3)J〟+1~ ゥ
dH-6卜2
ただしZんはサンプリング時間kに置ける遊脚足先のこ座標Lは遊脚足先が最も高 くなっ
た時の =座標partnとdH__はそれぞれ次の着地目標位鼠 現時点より一歩前の遊脚の着地位置
の∬座標である
442 ホップフィールド形ニューラルネットによる逆運動学の解法
軌道生成を行なう二足歩行ロボットとして Fig48に示す 7リンク7自由度の二次元
のモデルを用いたこのモデルにおいて姿勢を表すための変数のうち両脚のつま先と鐘
の目標値は倒立振子方程式からすでに与えているので一意に決まる従って残 りの変数
を得るために最適化問題として扱 うことによってこの逆運動学を解 くこの逆運動学の解
法にホップフィールド形ニューラルネットを用いたこのニューラルネットは与えられ
たエネルギーを最小にするように各ニューロンの出力が決定される 【4546】ニューラル
ネットワークへの入力は重心と両足のつま先と鐘の1 ~座標の 10個であり出力は各関節
位置両足つま先位置及び重心位置の∬ニ座標の 18個であるニューラルネットのエネ
ルギー関数は以下に挙げる条件を満たすように作った
(1)各関節間の長さが実際のロボットのリンクの長さに等 しいこと
(2)足先位置 (鐘とつま先)が目標位置に一致すること
50
Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

Figul(48Coor(lillateS
(3)重心 と各関節の位置の関係が満たされること
(4)膝の関節が逆向きに曲がらないこと
(5)重心が目標位置に一致すること
(6)上体が極端に傾かないこと
これらの条件を考慮 したエネルギー関数 (付録3参照)から求められるニューラルネット
ワークの出力はそれぞれのニューロンセルの振るまいを示す微分方程式を数値的に解 く
ことにより求められるこのようにして上に示 した条件を満たすような最適に近い解を
得ることができる
45 階層型軌道生成システムを用いた歩行実験
まず前節で述べたシステムを用いてシミュレーションによって二足歩行の軌道生成
を行なったシミュレーションを行なうにおいて以下の仮定をロボットに設けた
1ロボットの接地点まわりの トルクはないものとする
2人間の歩行において全歩行周期の 10-15は両脚が地面についているといわれて
いるが単脚支持相ではロボットは常にどちらか一方の足のみで支持され支持脚
遊脚の切 り替えは瞬時に行なわれるものとする
51
3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

3足と床面との間には十分な摩擦が働 き滑べることはないものとする
また倒立振子を用いて重心位置の予測をする場合において次のような仮定を設ける
1ロボットを重心に質量が集中した 1質点の倒立振子であると仮定 しその振れは微
小であるとする
2このモデルは足底があり1点支持ではないが振子の支点は常にロボットの支持脚
の錘にあるとする
用いたモデルの仕様はTとlbe143に示す重心の目標位置は90(mと目標速度はLl5(mS
を与えてシミュレーションを行なったその結果をFig49に示す
rTal)1e43Sl)e(ifi(ati()llOfth(biped1O(olllOtiverobot
Li11klぐllgt11 Positio11OfⅠnaslSeC11t(r Mass
恒11) 可1一1) lm(kg)Foot 01こ) 007 00こI
Lone-でrl)artOfl叩 025 0125 0ll
U1)1)erl)artOfl(1g 023 0115 009
Figure419Thewalkingsilnulationuslllgtilellierar(hv町Stel11
52
次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

次にこの生成された軌道をprimeト型の二足歩行ロボットに適用した結果について述べる
歩行ロボットはシミュレーションのモデルと同じにするために42で製作 したロボットの
足首に2自由度を付加 し8自由度としたFigtlre410にそのロボットを示すFigure49
に示されてる軌道をこのロボットに与えて歩行実験を行なった結果一歩約 3秒歩幅約
30cmの比較的ゆっくりした歩行に成功した歩行の様子をFig411に示すその歩行は
計算機シミュレーションの場合ほど安定ではなく足首が重 くなったため歩幅などにふら
つきが出たただしここでも神経振動子を用いた軌道生成の場合と同様にsagitta1plalle
内の動きはあらかじめ与えておいた
神経振動子を用いた歩行実験結果と比較を行なう階層型軌道生成システムから得ら
れた歩行パターンによる歩行実験においては足首のモータによって歩行中に重心が支持
脚の足底にのるようになっておりロボットの左右方向については静的な安定を保ちなが
ら歩行を行なっているこれは神経振動子を用いた歩行実験でも同じことがいえるしか
しながら階層型軌道生成システム用いた歩行実験においてはロボットは両足の足首に
加えられたサーボモータを用いてlntelall)lalle内で重心の移動を自由に行なえるように
なったため前後方向についても安定するようになったそのため自然な歩行とかけ離
れた軌道でも歩行が可能になっているといえる神経振動子を用いた場合は広い足底が
あるためかろうじて歩行が可能であったといえる
今回行なった歩行実験で一歩にかかった時間はそれぞれ神経振動子を用いた実験で
はCPUが i386(2OMHy)の計算機で約 5secと階層型軌道生成システムを用いた実験では
CPUが PentitllllPl(200MH)の計算機で 約3secであったこの結果は単純には比較でき
ないが同じ計算機を使用す拙 ゴ両方のシステムとも十分リアルタイムに対応できるもの
であると考えられる
なお今後8個の神経細胞からなる神経振動子を構成し8自由度のロボットに対 して
振動子を用いた歩行実験を行なっていくという課題が残る
53
n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

n
cap
cap
C
ハL
(し
T
〇手
-辛
01
8
00
7
WeightO9Kg
Figule410TlleCXl)CrilCllttlll0botwith8deglCeSOffreedom
FigulLC411TllCWIllkilLgViewofcxpclimelltalresult
54
46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

46 おわりに
本章では神経振動子を用いて二足歩行運動軌道の生成を行ないその軌道の実機への
適用を行なった
従来歩行パターンを得るために試行錯誤により振動子のパラメータを決定 していた
が2章で述べたように振動解を仮定し記述関数法を応用することにより振動子のパラ
メータの満たすべき条件を求めこの条件と実現するべき足先の軌道から求めた拘束条件
を使って振動子の結合パラメータを決定する方法を提案したその手法によって構成さ
れた振動子により生成された歩行パターンを製作 した6自由度の二足歩行ロボットへ適用
し歩行が可能であることを示した
また今まで理論的に確認されていた倒立振子方程式とホップフィールド形ニューラ
ルネットを用いた階層形軌道生成システムによって生成された軌道を8自由度に増やした
二足歩行ロボットへ適用し歩行が可能であることを示した
ただしいずれのシステムにおいても各関節の角度は軌道生成システムからロボッ
トへの一方向伝達になっておりロボットの状態は軌道生成システムにフィードバ ックさ
れていないこれは生体系でいうと感覚器からのフィードバ ックが存在 しないのと同じ
でありこのため歩行中の外乱や外部環境の変化に即座に対応できない今後の課題と
しては足底へのタッチセンサやロータリーエンコーダの取 り付けによってロボットの姿
勢や外部環境を軌道生成システムにフィードバックするシステムの追加や歩容パターン
の変化や地形に適応出来る歩行パターンの生成などが挙げられる
55
第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

第 5章 結論
本論文は神経振動子を用いて二足歩行ロボットの軌道生成を行なう問題について研
究を行なったものであるこれにより得られた結果は次のようにまとめられる
第 2章では非線形微分方程式で表される神経振動子モデルを用いて二足歩行の軌道
生成が行なえることを二次元の二足歩行ロボットモデルを用いた計算機シミュレーション
により示 したこの構成では一つの振動子が一つの関節を制御 し全体 としてロボット
の歩行が行なわれるという自律分散システムが形成されているまた神経振動子方程式
を記述関数法を用いて解析を行ない神経振動子が正弦波状の振動解を発生するための結
合パラメータに関する条件式を導き出したさらに歩幅と足の振 り上げ高さを設定する
ことにより求めた条件式とロボットの幾何学モデルから結合パラメータを求める方法を
提案 し歩行が可能な歩幅と足の振 り上げ高さの範囲を探索 したこれはロボットの幾
何学モデルとその歩容を設定することによって振動子の構造を決定するといういわゆる逆
問題を解けることが分かったしかし歩幅や足を振 り上げる高さについて限界があるた
めものを跨いだりといった多様な歩行軌道を生成するにはまだ課題が残っている
第 3章では比較的簡単な条件を付加することによって神経振動子方程式の結合パラ
メータを求めるために進化的学習法である遺伝的アルゴリズムを用いた一つの神経振動
子を一つの個体 とみなし結合パラメータを遺伝子で表 し歩行運動を表現型として遺伝
オペレータを適用 した評価方法は歩行距離の長さを評価する場合歩行中における関
節角と実際の歩行における関節角の類似性を評価する場合とその両方を用いて評価する
場合の三通 りで行なった結合パラメータのみを探索 した場合は歩行距離の長さを評価
と関節角の評価の両方の評価法で求めることができた定常入力と疲労度係数を加えて探
索 した場合は距離と関節角の両方を評価する方法に適用できたいずれにしても評価
関数をうまく設定することにより多様な歩行パターンを生成するパラメータを求めるこ
とが可能であることを示唆 している
第4章では振動子を用いて生成された二足歩行軌道を製作 した小型ロボットに与え
56
て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

て歩行実験を行なったロボットは計算機上で構築した二足歩行ロボットに準じている
がさらに三次元の動きを行なわせるために足首に二つの自由度を加えた6自由度を有
したものを製作したただし実験では信号の流れが軌道生成部から制御部-のフィード
フォワードとなるシステムとなっている実験によって計算機シミュレーションでは歩
行可能な軌道も実機に与えると歩行を成さないものが存在することがわかったさらに
倒立振子方程式とホップフィールド形ニューラルネットを階層型に組んだシステムを用い
て軌道生成を行ない歩行実験を行なったこのときロボットは足首にさらに2自由度を
加えた8自由度を有するものを作製したこれにより振動子による実験の場合よりも比
較的安定な歩行が実現された
以上本論文では解析的な手法と進化的学習法を用いることによって生体における
運動機能を司る神経系として振動子を構成し自律的な歩行軌道の生成過程を観察した
実際の神経系に比べ構成した振動子のモデルは単純なものであったが歩行軌道を生成す
るには十分な機能を持ったものであることが判明した
しかしこの研究で構成したシステムは一部は自律的であるがロボットに外界の状況
に対して即座に適応できる知能をシステムに付加する必要がある外界との情報をやりと
りするセンサからの入力に対 して反射的に行動を行なえるロボットシステムも必要とな
るであろうまた脳と神経科学の研究成果からさらに発展させた神経振動子を含むより
生物に近い神経システムを構築しロボットへの適用を考えていかなければならない
57
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
謝辞
本研究をおこなうにあたり北村 新三先生には終始多大な御援助御助言をいただき
ましたここに心より感謝致 します論文の執筆に際しては田中 克己先生赤滞 堅造先
生に多 くの御意見をいただきました厚 く御礼申し上げます
日頃から的確な御助言をいただいた呉松 保男先生 (産業技術短期大学)に心より御
礼申し上げますバイオインフォマテイクス (BI)研究会においては土屋 和雄先生 (京
都大学)喜多 -先生 (京都大学)をはじめとする多 くの先生方に貴重な御意見を頂きま
した
ロボットの製作において貴重な御意見を頂いた西川 郁子先生 (立命館大学)井上 博
允先生 (東京大学)稲葉 雅章先生 (東京大学)に心から感謝致 します
本研究のシミュレーションプログラムの作成やデータの収集に協力頂いた前田 卓二
字野 元博下西 幸治の各氏に感謝致 しますさらに実験装置の製作に協力いただいた矢
頭 伸介君に感謝致します
最後に村尾 元助手北川 郁技官をはじめとする研究室の方々にはさまざまなご援助
をいただきました深 く感謝致 します
なお本研究の一部は文部省科学研究費補助金重点領域研究 「創発システム」(No07243106)
の補助を受けておこなわれましたここにあらためて感謝の意を表 します
58
参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

参考文献
[1】北村新三片山 修ニューラルネットとロボットの学習日本ロボット学会誌vol13
No1pp63-67(1995)
【2】塚原伸晃編脳の情報処理朝倉書店 (1984)
【3】伊藤宏司伊藤正美著生体 とロボットにおける運動制御計測自動制御学会 (1991)
【4】川人光男脳の計算理論産業図書 (1996)
[5】三浦 ほか二足歩行ロボット資料私 文部省科学研究補助金総合研究 (A)成果報
告書 (1986)
【61歩行ロボット特集日本ロボット学会誌Vol11No3(1993)
【7】佐野古荘二足歩行の制御方式に関する基礎的研究 (けり効果を利用 した動的歩行)
日本機械学会論文集 (C編)Vol54No502pl)1274-1279(1988)
【81古荘山田角運動量を考慮 した2足歩行ロボットの動的制御一両脚支持気に蹴 りを行
なう歩行-計測自動制御学会論文集Vol22No4pp77-84(1986)
【9】佐野古荘伊神両脚支持相における2足歩行システムの トルク配分制御計測自動
制御学会論文集vol26No9I)1)1066-1073(1990)
[10日くurematsuYⅠくitallllllaSall(lIくoll(loYTrajectorypla1111illgandcontrolofabiped
locomotivel0bot-SillllllatiollalltlcxperilllClltRobotricsRecentnendsillResearcll
EducationalldAl)I)licatpiollJalllSlli(liM(ed)ASMEPresspp65-72(1988)
【111野田川村二足歩行ロボットの運動制御についての一考察 (重心 と遊脚の位置決め
制御方式)計測自動制御学会学術講演会vol1I)p2691270(1989)
59
【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

【12]五十嵐野飼二足歩行ロボットによるSagittalplane内の下位レベル適応歩行に関
する研究日本ロボット学会誌vol7No6pp12-22(1989)
【13日 ll村運動パターン学習による二足歩行ロボットの歩行実現日本ロボット学会誌
Vol3No3pp177-187(1985)
【141KurematsuYandKitamuraSExperimentofStationaryWakingofaBipedLocO-
motiveRobotUsingRepetitiveControlMemoriesoftheFacultyofEngineerlng
I(obeUniversityNo38pp17129(1991)
[15]呉松北札 中井二 足歩行ロボットの軌道計画-倒立振子とニューラルネットワークの
組合せ-システム制御情報学会論文誌Vol2No4pp118-127(1989)
[16】金広 文男稲葉雅幸♯上博允倒れても起き上がることのできる人間型ロボット栄
13回ロボット学会学術講演会予稿集No1pp195-196(1995)
[171永津俊治他編脳のレセプターと運動平凡社 (1990)
t18日 intCollinsandINStewartCoupledNonlinearOscillatorsandtheSymmetricsof
AnimalGaitsJNonlillearSci=3pp349-392(1993)
[19日くITsutsumiandHMatsumotoNeuralComputationandLearningStrategyforMu-
nJIPulatorPositionControlProcessingOfIEEEFirstAnnualInternationalConfer-
enceonNeuralNerworksVol4pp525-534(1987)
【20]湯浅ほか分岐現象を用いた多様なパターンを生成する自律分散システム計測自
動制御学会論文集27-llpp1307-1314(1991)
[21]GTagaYIYamaguchiandHShimizuSelf10rganizedcontrolofbipedallocomotion
byneuraloscillatorsinunp1edictableellVironmentiBiolCybern65pp147-159
(1991)
【221多賀山口清水歩行運動における運動と感覚の統合神経回路学会第二臥 全国大Fコ
会講演論文集pp129-130(1991)
60
[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

[231 MFrikA nonlincal1)atterllgCllCratOrfol1eggedlocomotionsystemsThe4th
Japanese-GermanSelllillarOnNolllillearProblemsillDynamicalSystem -Theory
andApplicatiollS-Ⅰ(HiraiandESllilllelllura(eds)pp12-20(1989)
[24日 ISBayalldHHelllallliMo(lelillgOfaNeuralPatternGeneratolWithCoupled
NonlincarOscilllltOlSJEEETlallSaCtiollS011Bio1-1edicalEngineeringVolBME-34
No4pp297-306(1987)
[25]RKatohalldMMoriColltrOIMctllOdofBipedLoconlOtionGivillgAsylnPtOtic
StabilityofTrajc(tolJVAutonlaticaVol20No41)p4051414(1984)
[261DEGoldbclgGelleti(-Algorit1111lSillScarcllOptilnizatiollandMa(11i11eLearning
Addison-Welscy(1989)
[27】北野 編遺伝的アルゴリズム産業図書 (1993)
【28】山田石黒内川遺伝的アルゴリズムを用いた自律分散システムの-構築手法 (多
足歩行ロボットの歩容獲得への適用)第 11回日本ロボット学会学術講演会論文集
pp119-122(1993)
【29】高西松熊中晩 加藤GAを用いた2足歩行ロボット下肢軌道計画第 11回日本ロ
ボット学会学術講演会論文集1)1)123-124(1993)
[30】HugodeGaliq Gelleti(PlOgr~11111--illgEvolutiollaryApplOaClleStOMultistlategy
Learlling計測自動制御学会第5回知能工学会 講演会資札 pp2ト40(1993)
【31】片山 修前田 卓患 呉松 保見 北村 新三神経振動子を用いた二足歩行運動の生成
計測自動制御学会 第 19回知能システムシンポジウム講演資札 pp133-138(1994)
【32】OsamuKatayamaYasuoKIlrClllatSualldSllillZOKitamuraTheoreticalStudieson
NeuroOscillatorforAl)1)liatiollOfBipedLocol110tionIEEEInternatiollalConfer-
enceonRoboticsallrlAutolllatiollpp2871-2876(1995)
[33】呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
61
(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

(34]KMatsuokaMechanism sofFlC(luenCyalldPatterllContlOlilltileNeuralRhythm
GeneratorsBiolCybel11561)l)345-353(1987)
[35]I(MatsuokaTheDy11a111icModelofBinocularRivalryBiolCybern 49pp201-
208(1984)
【361SⅠくitamuraandYI(urcmatsuTwostudiesoiltlleautOnOmOuSmotiongeneration
folbipedlocomotivelて)boもsSeeolldCollfcrellCeOnMecllatrOlli(sandRoboticsEd-
itorMHillerandMFrikDuisl)llrgMocrsGermanypl)319-330(1993)
[371SⅠくitamulaTIMac(laall(1YⅠ(urelllatSuTrajectoryGelleratiollforBiepedLocomo-
tiveMotionUsillgAIutuallyCoul)ledNcuroOscillatorⅠNTELLIGENTALTTOMA-
TIONANDSOFTCOMPUTINGTlCndsillRescalChDevelopmentandApplica-
tionsVol1TSIPleSSI)I)539-544(1994)
【38】片山 修字野 元博前田 卓志呉松 保見 北村 新三二足歩行のための自律的パター
ン発生計測自動制御学象 自律分散システム シンポジウムpp167-172(1994)
【391片山 修字野 元博呉松 保見 北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
[40】OsamuKatayalnaTaklljiMacdaMotolliroUnoYasuoKurematsuandShinzoKi-
talnuraNcuroOscillatolfoltheMotiollGcnelationofBipedLocomotiveRobots
1994Japall-UISASyllll)OSilullOILFlexibleAutomatiollISCIE-ASMEVol2pp
477-480(1994)
【41】上田完次下原勝憲伊庭斉志人工生命の方法工業調査会 (1995)
【42】片山 修北村新三神経振動子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
【431秋山木村神経振動子モデルを用いた四足動歩行の実現-ペーストロットの実現
-第 13回日本ロボット学会学術講演会予稿集 No1pp227-228(1995)
62
[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

[44】SKitamulaYKurclnatrS-IAiltort0mJOIJSMotionPlarmingandLearningControlofa
BipedLocoJmOtit(iR()I)()i11thIFACWorldCongressVol9pp221-226(1990)
[45]DWTa11kalldJJHol)fill(l1986AllADcollVCrterSignaldecisionCirCuitanda
linearprogram111111gCiluitJEEETransCJircuitandSystemVolCAS-33No5pp
533-541(1986)
[46]JHopfieldNcuralC1111)lltatトiollOfDeCisiollSill0ptimizatio11ProblemBiological
CybernetiesVol521)I)141-152(1985)
[471片山 修矢頭 伸介 呉松 保見 北村新三=ホップフィールド形ニューラルネットによ
る小型二足歩行ロボットのための軌道生成計測自動制御学会第24回知能システム
シンポジウム(1997)(発表予定)
著者関連文献
口頭発表
1片山 修松本 治弓軌 北村 新三言十測自動制御学会ニューラルネットによる宇宙ロ
ボットの軌道生成に関する研究第 19回システムシンポジウム第 18回知能シス
テムシンポジウム講演論文集1)1)289-294(1993)
2片山修宇野 元鳳 前田 卓瓦 呉松 保男北村 新三二足歩行のための自律的パター
ン発生計測自動制御学会自律分散システム シンポジウムpp167-172(1994)
3片山 修字野 元博呉松 保男北村 新三神経振動子の構成と歩行パターンの生成
第38回システム制御情報学会研究会発表講演会講演論文集pp43-44(1994)
4片山 修前田 卓志呉松 保男北村 新三神経振動子を用いた二足歩行運動の生成
第 19回知能システムシンポジウム講演資札 pp133-138(1994)
5片山 修村井 象 呉松 保男北村 新三ニューラルネットワークによる試作二足歩
行ロボットの歩行実験計測自動制御学会第20回システムシンポジウム第20
回知能システムシンポジウム講演論文集pl)285-288(1994)
63
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す
6呉松 保男下西 幸治片山 修北村 新三二足歩行運動生成のための神経振動子系
のパラメータ決定計測自動制御学会第21回知能システムシンポジウム講演論文
集pp109-112(1995)
7杉本 美保片山 修呉松 保男北村 新三確率オートマ トンの学習を用いた二足歩
行運動の軌道生成計測自動制御学会第23回知能システムシンポジウム講演論文
集pp213-214(1996)
8杉本 美保片山 修呉松 保男北村 新三神経振動子を用いた学習による二足歩行
パターン生成計測自動制御学会第40回システム制御情報学会研究発表講演会講
演論文集pp67-68(1996)
9片山 修矢頭 仲介呉松 保男北村新三ホップフィールド形ニューラルネットに
よる小型二足歩行ロボットのための軌道生成計測自動制御学会第 24回知能シス
テムシンポジウ左 (1997)(発表予定)
国際会議論文
1OsalnuKatayal11aTaktljiM ac(laMotohiroUnoYasuoKurematsuandShinzoKi-
tamuraNeuroOscillat()1foltileMotionGelleratiollOfBipedLocomotiveRobots
1994Japal1-USÅSyllll)()Siu1-1011FlexibleAutolllatiollISCIE-ASMEVol2pp
477-480(1994)
2OsamuKatayall札 YasuoI(ulClllatSualldSllil17JOKitamulaTheoreticalStudieson
NeuroOscillatorfolAl)1)1i(atiollOfBil)C(1Loeoll10tionJEEEIllternatiolllalCpnfer-
enceonRoboticsandAlltOnlatioll1)1)2871-2876(1995)
学会誌
1北村新三片山 修ニューラルネットとロボットの学習 (解説文)日本ロボット学
会誌vol13No11)1)63-67(1995)
2片山 修北村新三神経振子を用いた二足歩行運動の生成と小型ロボットへの適用
計測自動制御学会論文誌 (投稿中)
64
付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

付録 1 (217)式の詳細
(217)式K1-0より
(LJqSinang1001+cosdOol)坤lol+(LJqSill02+cosdC2)A亨ao2+(uqsin003+cos003)4号ao3
-(LJ2-1)po-bAT (61la)
(LJqSind010+cosd仇)A(LJIO+(LJJSillang軌 +cos013)A壬a13+(LJqSin012+cos4012)A芋a12
-(LJ-2-i)pl-bAi (61-b)
(LJqSill02+cosilO2O)一項 2+(LJJSill0_+cosang1021)Alla21+(LJqSin4023+cos023)A号a23
-(LJ2-1)p2-a-4f (6llC)
(LJqSinang1031+CosJO)_坤 Ij+(LJJSillang蛾 o+cosAO30)A(I30+(LJqSinang1032+cos4032)4fa32
-(LJ2-I)p3-bAf (61-d)
(217)式K3-0より
(sillang1001-LJ(1COSangユOul)耳lol+(silldOol2-LJqCOSdOol2)Afa2+(SillAOo3-LJqCl0Sang4003)j4号a3
-pLJPo (62-a)
(sinang1010-LJJC)S期 )JYllO+(Silld013-LJJCOS013)4号a13+(sinang1012-LJqCOSang1012)Afal2
-pLJPl (62-b)
(sinangユ020ILJqCOSAO2)4L20+(Sillangユ0121IWJCOS021)A壬a21+(Sin023-LJqCOSAO23)4号a23
-pup2 (62-C)
(sinAO31-WqCOSangユ031)一項Lj+(Silld00-uJCOSang1030)ATa30+(sinAO32-LJqCOS032)A亨a32
-pLJP3 (62-d)
(217)式K2-0より
Aa(tot+_4岩((2+A3(O3-2(so-aloo)-bA3
A3(I1+4gLli主+A-30112-2(sl-TIO)-bAL
43lL20+魂I21+A3IJ23-2(S2-a20ト b_43
現E3O+A(IL-1+_4岩t32-2(S- T30)-b_430
(63-a)
(63-b)
(63-C)
(63-d)
ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

ここでcos001-COS010eOSang1023-COS032Sin001--Sin010Sinangユ023equiv-sin032なる関係 と神経振動子系の対称性よりaol- alOa2-a13a3-a12a2-
L31a-a1a2-a3なる関係を考慮 しAo望A8-AbAh響ー43-A3AldjlA9-4壬Ai撃 A巨 4号tLLg LlO0-11O1Ly ttl2- L130P空 p-plP空p2-P3S響 so=
slSprime暫 S2- S3と定義すると(61)(62)(63)式は次のように表される
(61)式は
lll(J1+l12rprime02+ll(L3-2(LJ2-1)p-2bAl
m11a2O+ 川12(IW + nL1i(I13-2(LJ-2-1)p-2bAll
(62)式は
l21(lIOl+l22lL02+ l23(Lo3-2pLJP
m_1rf20+ rn22(I0+川r_3(L23-2pLJP
(63)式は
lこil(llJl+Ii2(lo_+l=33rlui-2(5-71)-bAo
m131(I_O+mLL=m+m33(I12i-2(Sprime-T)-bilo
となり次のように二つの式で表される
」3
3
つり
l
lソl
つり
primel
2
八ソ】
ソー
l
へソー
りJ
Tlt~
~
l
-1
1
1
lソー
3
--tIl
l
primeし
(
lull m12 Imii
m121 m)) m 23
m31 m3_) 川 i3
ただ し I ijm lj は 以 下の よ うである
I11 - 2(10Sangユ00141
2(LJ2-i)p-2bA 1
21WP
2(S-al)-bAo
2(LJ2- 1)p- 12b4121WP
2(Sprime-LTprime) -b46
(67-a)
l12 - (LJ(1(sillilOol2+sillAO13)+(cosAOo2+cos013))Al (67-b)
l13 - (LJ(1(sillang鮎 i+sinilO12)+(cos4003+cosang1012))Al (67-C)
l21- -2LJ(I(OSdOol41 (67-d)
l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

l22 - ((sillAOo2+sill013)-uq(cosOo2+cos013))AIL
123 - ((sillilOo3+sillang1012)-LJ(1(cosang1003+cos012))Ai
J31 - 4u
l32 - -4こ)l33 - 4o
m ll - (LJ(1(silliiO2u+sillang軌 i)+(OSangユ02O+(OS11031)-41)
m 12 - (LJ(1(SillJO21+sill03)+(cosang蛾 1+cosang1030))Al
m 13 - 2(()sJ2tJ1
mprime21 - ((sillJO20+silli1031)-LJ(1(cosdOl20+cosang1031))Al
m22 - ((sillJO21+sillperpiiO30)- LJq(cos021+cosang1030))Al
m23 - -2LJqCOSang1023Al
m 31 - 4o
m32 - J40
m33 - _iI
(67-e)
(67-f)
(67-g)
(67-h)
(67-i)
(68-a)
(68-b)
(68-C)
(68-d)
(68-e)
(68-int)
(68-g)
(68-h)
(68-i)
ゆえに歩容からtLIP POtLJIpqを与えると結合係数パラメータaは次式か
ら求めることができる
し
〕3
つり3
-1
ソ】
3
prime一-
l
ウ一
りl
ウ-
1
ユソJ
qリ
primel
-11
--I
1人ソl
つり
prime一
l
し
こ
1
」l
nソ一つリ
0
0
nU
α
α
cent
し
川radicll I7Ll2 mprime13
川prime21 77わり m23
77131 17ALノ3_) m33
-1
2(LJ2-i)p-2bA1
21WP
2(S-tL)-bAo2(LJ2- 1)p- 2bA11
21uP1
2(S-xprime)-bAlo
付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

付録 2 Motordrivecircuitusingpulsewidemodulation
50kn
0UTPUT
15km
付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す

付録 3 ホップフィールド形ニューラルネットのエネルギー関数
(α+1-CL)2+(βt+1I371)2-Li)2〈 (α5-α3)-(β5-β3)2-L4〉2
(αi+1- CLi)2+(βi+1-βi)2
E2R-〈(αO-Xo)2+(βO-zo)2+(aI-Xl)2+(β1-Zl)2)2
E2L-((α6--16)12+(36IZ5)A-+(07--1-7)12+(37-ZT)2)2
(89)
) (810
E3 -[(投 ((tJ7 0月 S ((tJ=I (I3投 (α21at-Xg)2
(投 (3i1+ 3t蓋 (3503投 (ei13iト Zg)2]2(811
E4R-F(aJ2I(L2CL3+Li(Ill)(L2+Li))
E4L-F(α5-(L5CIJ6+L(5(ll)(L5+L(5))
E5 - 〈(α9--1a)2+(I39-Zg)2)2E6 -(O4+oJ5)122
7
EH -sumi=0
) (812
(813)
(814)
〈9-1(cIJ7)ltlIIJl 柚 l3t)十gl αg)da19all(3g)a39 (8115)
以上のElからE6の和 として次のエネルギー関数を定義する
E - klEl+i2(LE2+RE2)+k3E3
+It4(LE4+RE4)+k5E5+k6E6+EH (816)
ここに
F(L)-i
0 ifL7≦072 ifL7gt0
でありEHはニューロンのアンプの特性から決定するエネルギー関数でV-a(u)ある
またXiZi(i-0i67g)は重心 と両足のつま先と鐘の LTZ座標で入力値であ りαiβi
(lJgPgはそれぞれの添字に対応する関節座標の目標位置の Lt1座標である左足が支持脚
の場合は(RL)-(01)右足が支持脚の場合は(RL)-(10)となるまたkl~k6は各
エネルギー関数の対する重みを示す


![e-learning における学習スタイル に関する一考察 · 「クラウドコンピューティング環境 におけるe-learningスタイル」 [部会B] 「クラウド時代の協働学習ツールと](https://img.pdfslide.us/doc/110x75/5ec6cc7257f948141d5ebe6d/e-learning-cf-eef-oeffffffffcf.jpg)