-
8/16/2019 Kendali Digital 4
1/30
Kendali Digital
Pertemuan 4
1
-
8/16/2019 Kendali Digital 4
2/30
2
-
8/16/2019 Kendali Digital 4
3/30
3
-
8/16/2019 Kendali Digital 4
4/30
4
-
8/16/2019 Kendali Digital 4
5/30
5
-
8/16/2019 Kendali Digital 4
6/30
Menentukan periodesampling
• Apakah semakin kecil periodesampling semakin bagus??
• Semakin kecil periode samplingsemakin besar kecepatan
komputasiang dibutuhkan!
• "erapakah sampling time ang pas?#ntuk sistem dg pole2
real$maka
-
8/16/2019 Kendali Digital 4
7/30
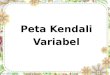
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (s)
A m p l i t u d e
k=0.36k=0.75
k=1
k=2
k=5
%
&e'ie( o) s*plane
+ocations o) polesin,uence the 'alues o)-.'ershootSettling
time
+ocations o) polesare ad/usted bthe 'alue o) thegain 0k
.'ershoot and setlling time
-
8/16/2019 Kendali Digital 4
8/30
&elation bet(een s and
1
12
21
2
1
:sTustin'
1
1
1: bacwardsEuler'
1
1:forwardsEuler'
:ionsapproximatSome
relationOriginal
+
−
=−
+
≈=
−=
−≈=
−
=+≈=
=
z
z
T sor s
T
sT
e z
Tz
z sor
Tse z
T
z
sor sT e z
e z
sT
sT
sT
sT
-
8/16/2019 Kendali Digital 4
9/30
Mapping s*plane into *plane 01
( )
period).sampling:T frequenc!signal:" TondependwillanglesT#e
plane.$%of circleunitt#eintomappedare plane$sof axisimaginaron
t#elocations&ole
1sincos
stable)"marginall plane$sof axisimaginarinare polest#at
t#emeansit(f
ω ω
ω ω ω σ
σ ω σ
ω
ω σ ω σ ω σ
⇒
∠=+==→=
=
===
+=
= ++
T T jT e z
eeee z
j s
e z
T j
T jT T jT T j sT
-
8/16/2019 Kendali Digital 4
10/30
1
Mapping the lines o) constant 6
( ) ( )[ ]
( ) ( )
{ } { } z j z
T jr T r
T jT r
er reee z
j s
T T jT jT
ma*+e
sincos
sincos
'
+=
+=
+=
=←==→≠
+=
ω ω
ω ω
σ
ω σ
σ ω ω σ
-
8/16/2019 Kendali Digital 4
11/30
Mapping s*plane into *plane 02
11
Alias
region
Aliasregion
( )
T F f
f F f F
s
s s
π π π ω =≤=
≥
2
freq.analog:freq.!Sampling:2:criterion ,quist
-
8/16/2019 Kendali Digital 4
12/30
7ime response based on pole positions
12
-
8/16/2019 Kendali Digital 4
13/30
Sho( the positions o) poles (hich ha'e the same damping ratio
08-constant and ha'e di9erent undumped natural )re:! 0(n;
Sho( the positions o) poles (hich ha'e the same undumped
natural)re:! 0(n - constant$ but ha'e di9erent damping ratio;
13
plane$sonandof +e-iew nω ζ
)"
sin1
tanase
)"
agnitude
1
1
2
1$
22
2
ζ
ζ θ ζ
ζ
ω
ω ω σ ζ ω ζω ω σ
f
f
j j s
n
nd
nnd
=
=⇒
−
=
=
=+=
−+=+=
−
-
8/16/2019 Kendali Digital 4
14/30
Ans(er
14
'=nω
'>n
ω
'=ζ
1=
ζ
-
8/16/2019 Kendali Digital 4
15/30
15
Sho( the
-
8/16/2019 Kendali Digital 4
16/30
1=
"2) plane$%onand nω ζ
-
8/16/2019 Kendali Digital 4
17/30
1%
plane$%onand/inding nω ζ
22
2
2)")"
nn
n
s s sr s y
ω ζω ω ++=
( )
( ) 22
22
2
2
22
1(2
ln1
ln
ln
1
ln
ln
1
12
0s:&ole
θ ω
θ ζ
ζ
ζ
θ
ζω
θ
ζω
ζ ω θ
ζ ω ζω
ζω
θ
+=⇔
+
−=⇔
−
−=−
=⇔
−=⇔=
−===
−±−=−±−
=
−
r T
r
r
T r
T r er
T ree z
ja
acbb
n
n
nT
n j sT
nn
n
-
8/16/2019 Kendali Digital 4
18/30
>ample
1
1sTssumefrequencnaturalundampedt#eandratiodampingt#e/ind
342.'
230.'435.'
)"1
)"
r"%)
"%)
:sstemcontrolloopcloseddigitalof functiontransfera6i-en
2
=
+−
+=
+
=
z z
z
z G
z G
( )
( ) 72.'ln1
28.'ln
ln
57'.'978.'315.'8.'
'342.'%:equationsticc#aracterisstemT#e
:Solution
22
22
2(1
2
=+=
=+
−
=
±∠=±∠=±=
=+−
θ ω
θ ζ
θ
r T
r
r
r j z
z
n
-
8/16/2019 Kendali Digital 4
19/30
Solution b graphicalmethod
1
315.'8.''342.'%:equationsticc#aracterisstemT#e
2(1
2
j z z
±=
=+−
71.27.
28. ===T
n
π ω ζ
-
8/16/2019 Kendali Digital 4
20/30
Sstem Stabilit
Sstem is stable i) the roots o) the characteristic e:! areinside
the unit circle!
Some methods to check )or the stabilit o) a
discrete*timesstem!1! @inding the 'alue o) roots o) the
characteristic e:!
directl!
2! " doing some stabilit test (ithout
-
8/16/2019 Kendali Digital 4
21/30
@inding the roots
• " )actoriation to
-
8/16/2019 Kendali Digital 4
22/30
>ample 1 o) method 1
heck (hether the sstem as sho(n in the
-
8/16/2019 Kendali Digital 4
23/30
Ans(er
23
( )
( ) ( )( ) ( )
( )
stablenotissstem870.1870.1
148.
927.116"%)1:equationsticc#aracteriT#e
1148.
927.1)"
12
1
121)"
2
1
21
2
22)1"
2
01)"
)"1)"
+"%)="%) :functiontransfersstemloop$closedT#e
2
2
2
21
2
1
→−=→=+
=−+→=+
=−
=
−−=
−−−−=
−−
−−=
+−−=
+
−=
+=
−
−
−
−−
−
−−
−
z z
z
sT z
z G
e z
e
e z z
e z z z G
e z
z
z
z z
s se Z
s s
e Z z G
z G z G
T
T
T
T
T
TsTs
-
8/16/2019 Kendali Digital 4
24/30
>ample 2 o) method 1
@or the case o) eample 1$
-
8/16/2019 Kendali Digital 4
25/30
Ans(er
Keep the sampling time on 7$ (e ha'e-
25
( )
( )
( )
1ln21
44
124
:if stable bewillsstemT#e
24
'12
'121eq.c#ar.T#e
12)"
2
2
2
2
22
2
2
2
2
-
8/16/2019 Kendali Digital 4
26/30
Special Pro/ect
2=
D MotorMikrokontroler
7achometerAmpli
-
8/16/2019 Kendali Digital 4
27/30
7hank ou
2%
-
8/16/2019 Kendali Digital 4
28/30
7ime domain speci time2.
o-ers#ootaximum1.
:e performanct#eof &arameters
sstemt#eof ratiodamping:
sstemt#eof frequencnatural undamped:
ζ
ω n
-
8/16/2019 Kendali Digital 4
29/30
&eminder- in,uence o) the dampingratio
2
-
8/16/2019 Kendali Digital 4
30/30
•
&emind poles position on s*plane
3
222222
222
d
1
part(mag.
part(+ealfrequenc(natural?ndamped
cossinratio(amping
*s
ζ ω ω ζ ω σ ω ω
ω σ ω
ζω σ
ω
ω
σ β θ ζ
ω σ
−=−=−=
⇒+=
=
===
+=
nnnnd
d n
n
n
n
plane$sonand nω ζ