Embed Size (px)
Citation preview

Joint International MasterProject
Dennis Böck & Dirk C. Aumueller
1

Basic Project Goals RoboCup Challenge Communication Architecture Remote Controlling via Bluetooth Research Domains Mapping and Position Estimation Evaluation of a basic Robot Layout Summary
2

robot swarm to cover an area and search for a defined target
Area to cover is a flat surface which likely contains obstacles such as chairs, boxes, tables, etc.
range to construct the robot should be $100 - $200
preferred prototyping platform is the LEGO NXT
3

Reasons are ◦ Security◦ Observation◦ Finding◦ Rescue
Ways of detection◦ Contact◦ Visibility◦ Motion◦ Infrared◦ Sound◦ Heartbeat
4

5

International research and education initiative
Goal is the fostering of AI and intelligent robotics
6

7

RCNavigationControl, a control program◦ Opens a listening port for Bluetooth connections◦ Executes the commands it receives
8

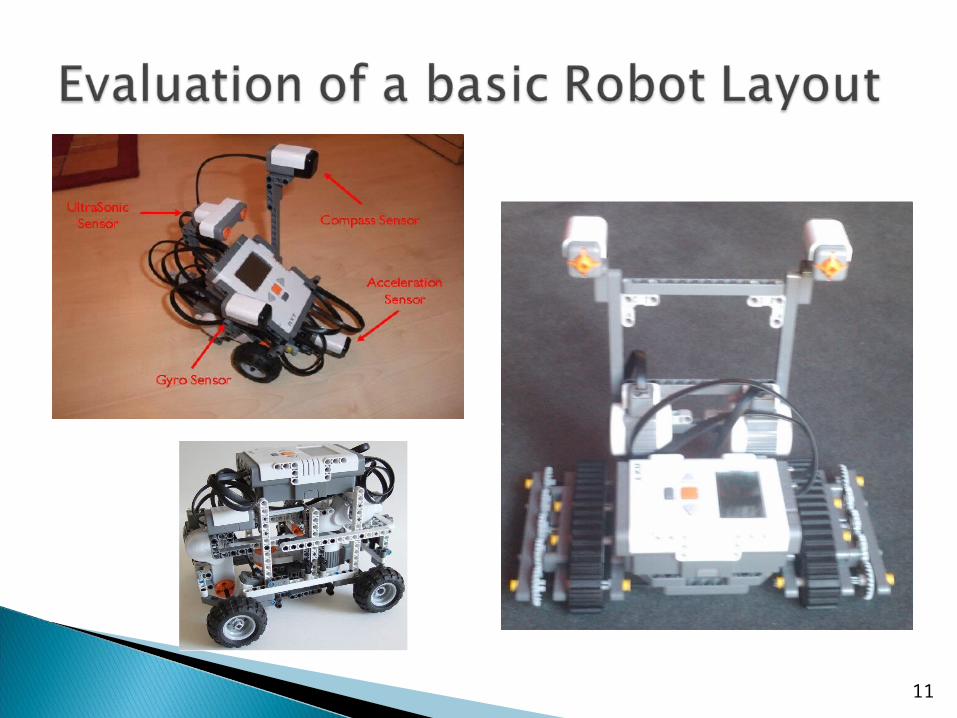
Computer Vision◦ Determine position of a robot with image
recognition Sensor Evaluation
◦ Acceleration Sensor◦ Gyro Sensor◦ Infrared/Ultrasonic Sensor◦ Compass Sensor
Swarm Search Inertial Navigation
9

Algorithm allows to localize the robots global position together with the possibility to build a map of its environment
Two key operations◦ Generate a map of the environment while
processing through◦ Pose estimation based on relative movement
10
11
Interesting and challenging project Reallife scenarios Not the standard university project Lots of theoretical learning Students from different universities work
together
12











![Bluetooth Profiles.ppt [Schreibgeschützt]gcc.upb.de/.../$FILE/Bluetooth-Standard-Overviews.pdf · 31.05.2002, Böck Michael 9925077, Rötzer Matthias 9926341 11 General Access Profile](https://img.pdfslide.us/doc/110x75/5edeb77ead6a402d666a0ed8/bluetooth-schreibgeschtztgccupbdefilebluetooth-standard-overviewspdf.jpg)