Embed Size (px)
Citation preview

Current Status of Hayabusa2
Yuichi Tsuda, Project Manager, Hayabusa2 ProjectJapan Aerospace Exploration Agency
Small Body Assessment Group 18th Meeting, Jan.18, 2018

Sun
Launch(Dec.2014 )
Earth Sw ing-by(Dec.2015)
Ryugu Arrival( Jun-Jul.2018)
Ryugu Orbit
Hayabusa2 T rajectory
Earth Orbit
Ion Eng ine Powered Cruise # 1(Mar.22 , 2016~May.20 , 2016)
Ion Eng ine Powered Cruise # 2(Nov.22 , 2016~Apr.26 , 2017)
Ion Eng ine Powered Cruise # 3( Jan.10 , 2018~Jun.5 , 2018)
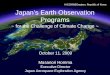
Present Status of Hayabusa2 (as of Jan.16, 2018)
• Traveled 2.79 billion km (w.r.t heliocentric inertial frame)• Solar distance 1.25AU.• Earth distance 2.08AU (RTLT=34min.)• Just started the final Ion Engine burn before the asteroid rendezvous on Jan 10.
1
We are here!

<Recent Ops.>2017Apr.15 2nd IES Burn completedApr.25-26 IES trim burnMay16-28 Jupiter/star calibrationMay.30-Jun.1 RCS test burnSep.5 Spacecraft clock resetJul.18-Nov.14 Science instruments
program updateNov.18,28 DSN-SSOC realtime Doppler
transfer testDec.2 DSN-UDSC uplink transfer
testDec.26-27 IES test burn
2018Jan.10 3rd term IES Burn Start<Near Future Ops.>~May Ryugu first lightJun.5 IES burn completes. OpNav
begins.
Recent / Near Future Cruise Operation
2
Sun Earth
IES Start 2016.3.22
IES Stop 2016.5.20
IES Start 2016.11
IES Stop 2017.4
IES Stop 2018.6
IES Start 2018.1
Sun
EarthOpNav Rendezvous Phase start (Jun.5, 2018)
Ryugu Arrival(Jun.21-Jul.5, 2018)

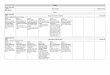
Proximity Operation Plan
3
20185 6 7 8 9 10 11 12 1 2 3 4 5 6 7 8 9 10 11 12
2019
・Asteroid Arrival (20km)
・Approach Guidance Start(2500km
)・Ion Engine Stop
・Mid Altitude O
bservation Descent1 (5km)
・Gravity M
easurement Descent (1km
)・TD1 Rehearsal 1 (100m
)・M
INERVA-II Deploym
ent (50m)
・TD1 Rehearsal 2 (50m)
・TD1 (0m)
・MASCO
T Deployment (50m
)
Conjunction Period
Hot Asteroid Period
・TD2 Rehearsal 2 (50m)
・TD2 (0m)
・Pre-Impact Descent (1km
)・Kinetic Im
pact (500m)
・Crater Search Descent (1km)
Pin-Point TD Campaign (m
ax 4 descent)
Landing Site Selection1 Landing Site Selection2&3
・Mid Altitude O
bservation Descent2 (5km)
・Asteroid Departure
・MIN
ERVA-II Deployment (50m
)
Typical plan, Actual schedule fixed after arrival
Spacecraft ‘hovers’ at 20km altitude. All descent ops listed here are critical operations.

Prox Operation Training Campaign 2017
• Landing Site Selection (LSS) Training (2Q-3Q, 2017)– Purpose: Verification of LSS process
• Decision making framework/criteria, Tools and interface, ...– Trainee
• 100+ participants, JAXA engineering, Science (International), MASCOT team
– Training data• Asteroid images (CG) based on actual observation operation plan• Science data (Thermal, near infra-red, LIDAR data, gravity, …)• Navigation data (position & velocity of S/C), Attitude data.
• Real-Time Integrated Operation (RIO) Training (4Q, 2017-1Q, 2018)– Purpose: Real-time operation training, Verification of ground support tools
• Touchdown operation, Impact operation, rover landing…– Trainee: all the operation staffs– Training data
• Asteroid images (CG, real-time)• Telemetry data (with communication delay)
4

Landing Site Selection Practice step1: ‘God team’ creates Ryugoid
• Virtual asteroid ‘Ryugoid’ in place of mysterious Ryugu.
• Assume from the formation history of Ryugoid. The shape and all the other properties were derived from the history.
• Each property was Intendedly deviated from known Ryugu property.
• The rotation state is randomly selected from public via Twitter.
• Shape model: 25cm resolution, 370 million polygon.
• Observation data generated based on actual operation plan & actual instruments performance.– Generates attitude/trajectory simulation data
based on operation plan– Observation data and their ancillary data
generated based on the simulation data.– Goes through all the ground pipe line
process as it really is.5

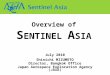
Landing Site Selection Practice step2: Sci.&Eng. teams to solve the problem
6
Touch Down Secondary Target
Touch Down Primary Target
Landing Site Decision
EvaluationModeling/AnalysisObservation(Simulated date generation)
Jan-Jun, 2017
May-Aug, 2017
Jun-Aug, 2017
Sep 4, 2017

Surface feature of Ryugoid
Forest Hemisphere
Snow White C.
Doc C.
Grumpy C.
Sleepy C. Happy C.
Bashful C.
Sneezy C.
Dopey C.
Apple R.Comb R.
Queen C.
Piece R.
hyb2_onc_180717_122656_tvf_l1a_LSS_TEST
Mashroom R.
Axe R.
Herb R.Ribbon R.
Yodel M.
Seven M.
Hut Regio
C. ... CraterM. ... MontesP. ... PlanitiaR. ... RockLumberjack C.
Fa i rly Regio
Zone B
Zone A
Seven Dwarfs
Kingdom Hemispherehyb2_onc_180717_083856_tvf_l1a_LSS_TEST
Apple R.
Comb R.
Snowman C.
Seven M.Queen C.
Prince C.
Coffin R.
Norm R.
Burial Pi tMirror P.
Boar R.
Squire C.Yodel M.
Grimms M.
C. ... CraterM. ... MontesP. ... PlanitiaR. ... Rock
White P.
Sneezy C.
Coal Hat R.
Lumberjack C.
Horse C.
Bi ldung P.Zone DZone D2
Zone C
7

Landing Site Selection Practice step3: Landing Site Decision
8
MA-1 MA-2MA-3
MA-4
BAD
ED2
C
MI-1
Primary set:Zone B, MA-2, MI-1Backup set:Zone D2, MA-1, MI-1
Two set of Mother spacecraft landing, MASCOT lander landing, MINERVA-II rovers landing sites are derived based on safety and scientific value.

Real-time Integrated Operation Practice (RIO)
9
TRIO (Training of RIO) Jan-Sep,2017: 18 run – 13 crush – 5 success/okeyRIO Oct.2017-Apr.2018: total 30 run planned, 13 run – 4 crush – 9 success/okey.

RIO Example: MASCOT Release Operation Practice (Oct.19-20,2017)
10
MASCOT Descent Aim Point
Descent start (-1m/s)↓
Slow Down (-0.1m/s)↓
60m arrival/release↓
Ascent to 3km↓
Hovering
View of Optical Navigation Camera ONC-W1

“Imagining Ryugu” Space Art Contest
11
http://www.hayabusa2.jaxa.jp/topics/20171227_e/
Can you predict Ryugu appearance better than scientists?

12
Thank you!










![01 Japan Sentinel Asia.ppt [Read-Only] · Mudslide at Mt. Mayon, Philippines. Japan Aerospace Exploration Agency 30 Satellite Images before and after Disaster. Japan Aerospace Exploration](https://img.pdfslide.us/doc/110x75/60009a70adb04f73302aa29e/01-japan-sentinel-asiappt-read-only-mudslide-at-mt-mayon-philippines-japan.jpg)