Embed Size (px)
Citation preview

Jan KoubaGeodetic Survey Div.
NRCanCanada
IGS Products and Applications

Content
• IGS Combined Products– Objectives– Description– Precision/availability– Consistency
• Use of IGS Products– Relative Positioning– Precise Point Positioning/Navigation– Compatibility– Scientific Applications
• IGS Products Limitations and Solutions• Future Developments

IGS PRODUCTS
• Support practical positioning and scientific applications of GPS, such as– surveying, navigation and national geodetic control networks– monitoring of Earth rotation, deformation and atmosphere (trop. &
ion.)– easy access and contributions to ITRF, time transfers, etc.
• Provides convenient and precise “IGS reference system” through– the core IGS combined products: orbits, Earth rotation parameters
(ERP), station positions/velocities and satellite/station clocks – additional combined products, consistent with the core products:
tropospheric zenith path delays (ZPD), ionospheric TEC (total electron count) maps and associated rec./satellite diff. calibration biases (DCB)
– IGS combined orbits (since 1994) ; clocks and ERP (since 1995); station positions (since 1996) and tropospheric ZPD (since 1997)
• IGS Products are more precise and reliable than the individual AC solutions (up to 8 Analysis Center solutions combined)

IGS Product Description
• Core Combined Products: orbits/clocks/ ERP/station positions– IGS Final orbit, clock and ERP combined solutions (12 day delay)– IGS Rapid orbit, clock and ERP combined solutions (17 hour delay)– IGS Predicted orbit and clock combined solutions (1 hour before the
observation day)– Nine Associate ACs (AACs) produce regional station position solutions
in SINEX format– Up to eight ACs, AACs contribute global orbit, ERP, global station
position (SINEX) solutions and up to five ACs clock solutions
• Combined Zenith Path Delay (ZPD)– seven ACs, produced by GFZ, since Jan. 1997– Weekly files by site, 2 hour resolution (four weeks delays)
• Combined Global Ionosphere Maps of Total Electron Content (TEC) – Five ACs, AACs, Combined TEC and DCBs (Differential Code Biases) in
IONEX format, produced by ESA since June 1998– Daily files, 2 hour resolution (four weeks delay)

Analysis Center Functions
• IGS Analysis Centers (AC): are the basis of all IGS products, improved IGS products are largely due to AC improvements!– Typically performs continuously (daily): three types of global
solutions (Predicted, Rapid and Final) utilizing complex and sophisticated software, often developed in house over many years
– Conforming to IGS/IERS standards, but innovations are encouraged.– Documentation on an each AC(‘ccc’) approach is at the IGS CB
Archives:http://igscb.jpl.nasa.gov/igscb/center/analysis/ccc.acn
– Continuously involved in research & developments: striving for the best solutions and sharing scientific results amongst AC colleagues
• Helpful and healthy competitions amongst all ACs
• Associate Analysis Centers (AACs):
– typically do not perform all global solutions, e.g. the Rapid only, or only certain specific solution products, such as:
– RNAAC (Regional Network AAC), GNAAC (Global Network AAC), IAAC (Ionospheric AAC) etc.
IGS PRODUCT Table
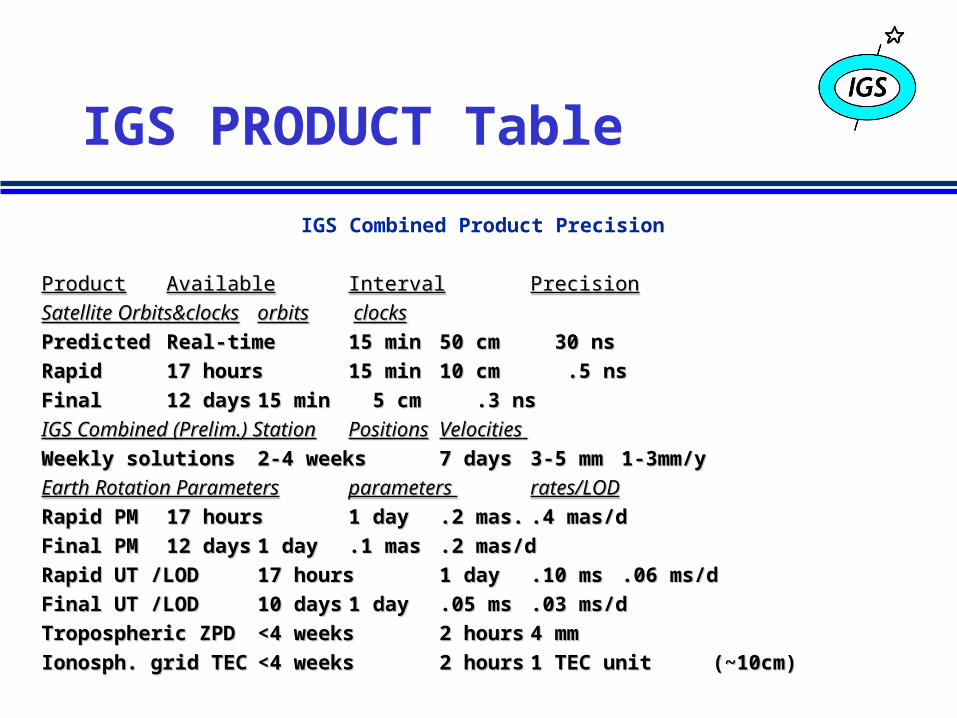
IGS Combined Product Precision
ProductProduct AvailableAvailable IntervalInterval PrecisionPrecision
Satellite Orbits&clocksSatellite Orbits&clocks orbitsorbits clocksclocks
PredictedPredicted Real-timeReal-time 15 min 15 min 50 cm50 cm 30 ns 30 ns
RapidRapid 17 hours 17 hours 15 min15 min 10 cm10 cm .5 ns .5 ns
FinalFinal 12 days12 days 15 min15 min 5 cm 5 cm .3 ns .3 ns
IGS Combined (Prelim.) StationIGS Combined (Prelim.) Station PositionsPositions VelocitiesVelocities
Weekly solutionsWeekly solutions 2-4 weeks2-4 weeks 7 days7 days 3-5 mm3-5 mm 1-3mm/y1-3mm/y
Earth Rotation ParametersEarth Rotation Parameters parameters parameters rates/LODrates/LOD
Rapid PMRapid PM 17 hours17 hours 1 day1 day .2 mas..2 mas. .4 mas/d.4 mas/d
Final PMFinal PM 12 days12 days 1 day1 day .1 mas.1 mas .2 mas/d.2 mas/d
Rapid UT /LODRapid UT /LOD 17 hours17 hours 1 day1 day .10 ms.10 ms .06 ms/d.06 ms/d
Final UT /LODFinal UT /LOD 10 days10 days 1 day1 day .05 ms.05 ms .03 ms/d.03 ms/d
Tropospheric ZPDTropospheric ZPD <4 weeks<4 weeks 2 hours2 hours 4 mm4 mm
Ionosph. grid TECIonosph. grid TEC <4 weeks<4 weeks 2 hours2 hours 1 TEC unit 1 TEC unit (~10cm)(~10cm)

IGS Orbit Improvement
1994 to Mid 1999

IGS PRODUCTS (AC performance)
BROADCAST (BRD), IGS PREDICTED (IGP) and IGS UTRA_RAPID (IGU) ORBIT RMS WITH RESPECT TO THE IGS RAPID (IGR)
ORBITS
0
1
2
3
4
5
6
7
16-Nov-99 16-Dec-99 15-Jan-00 14-Feb-00 15-Mar-00 14-Apr-00 14-May-00
DATE
WE
IGH
TE
D R
MS
(m) brd
igp
igu

IGS Orbit Comparison
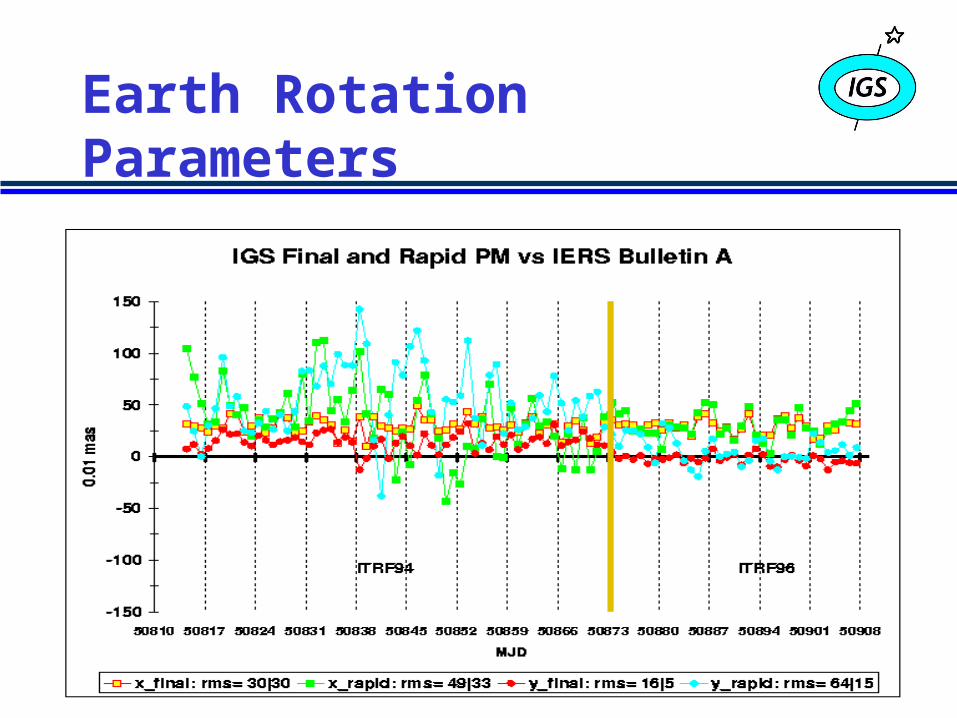
Earth Rotation Parameters

Consistency of IGS Products
• Consistent with the current international conventions– International Earth Rotation Service (IERS) Conventions 1996– International Terrestrial Frame (ITRF)(currently ITRF97)
• IGS CORE products (orbits/clock/ERP/stations) are mutually consistent – Since December 1998, combination of minimally constrained AC
solutions– Nearly exact ITRF transformations (e.g. for the ITRF97-ITRF96
and the future changes)– ITRF realizations used for IGS Products (for more details see the
presentation on: IGS ITRF Realization and Transformations) :• ITRF92 - Jan 2, 1994(Wk 0730) to Dec 31, 1994 (Wk 0781)• ITRF93 - Jan 1, 1995(Wk 0782) to Jun 29, 1996 (Wk 0859)• ITRF94 - Jun 30, 1996(Wk 0860) to Feb 28, 1998 (Wk 0946) • ITRF96 - Mar 1, 1998(Wk 0947) to July 31, 1999 (Wk1020)• ITRF97 - Aug 1, 1999(Wk 1021) to present (since Feb 27, 2000
IGS ITRF97 (SINEX))– IGS satellite clock solutions are aligned to the GPS time via
broadcast clock corrections:• in the future IGS combined clock solutions should be aligned to UTC.

USE of IGS PRODUCTS
• IGS Products greatly enhance and simplify (no need for complex global GPS solutions) all GPS analyses and applications such as:
• Positioning/navigation– Global, Regional and Local
• Relative positioning with respect to the IGS station Polyhedron of about 200 stations at the mm/ppb level (IGS orbits/ERP and station positions can be fixed even for baselines 2000 km and longer). No need for precise satellite clocks (nearly eliminated)!
• Absolute, precise point positioning (ppp) worldwide, with respect to the “IGS Reference Frame” (IGS orbit/clocks/ERP held fixed) at mm precision level
• Absolute, precise point navigation worldwide (ground, air, LEO satellites - no base stations needed!), at a cm precision level
• Global Change Monitoring: solid Earth, atmosphere and oceans– ERP monitoring– plate motion and crustal deformation monitoring, volcanoes, etc.– monitoring of atmosphere (troposphere and ionosphere)
• Precise time and freq. transfers (future contributions to UTC)

Relative Positioning
• Relative position precision at ppb/mm– IGS Orbits, ERP, base station position solutions can be held fixed at
the IGS solutions for all, even extreme, baseline lengths at ppb/mm precision level (in ITRF insensitive to ERP)
– When using double differencing, potentially more robust (than precise point positioning), the IGS products ease data cleaning, ambiguity fixing
– Complete covariance/correlation matrix available (e.g. for in SINEX format)
– Suitable for continental, regional, national ITRF densification (e.g. EUREF - normal equation matrix stacking of RNAAC SINEX solutions)
• Warning: fixing IGS orbits/ERP implies very precise reference orientation and scale even for (SINEX) unconstrained solutions! (I.e. no stations fixed)
• For long baselines (~ 1000km) ITRF orientation/scale changes need to be taken into account prior normal matrix stacking
– Insensitive to incompatibilities and clock errors• Insensitive to clock errors and all small (cm) ITRF changes for baselines
<1000km

Relative Positioning
Relative Positioning Rrequirements for cm Precision ( double differenced phase data with, or without phaseambiguity fixing ; ~ 1 h occupancy)
IGS Products/ Baseline < 10 km 10 – 100 km 100 – 1000 km >1000 km
IGS Orbits No (Broadcast) IGS Rapid IGS Rapid/Final IGS FinalIGS ERP**** No No No NoIGS Sat Clocks No No No IGS Rapid/FinalIGS Iono Delays IGS iono* IGS iono* No** No**IGS Tropo Delays Nominal/IGS tropo IGS tropo/ estimate Estimate EstimateIGS ITRF Trasform No No No Yes
ERROR MODELSIGS Ant phase center No Yes*** Yes*** YesSolid Earth tides No No Yes YesOcean loading No No Yes YesRelativity correction No No Yes YesSat phase wind up No No No Yes
Single frequency data; ** Two frequency data; *** For different antenna types only;**** IGS ERP implied by IGS Orbits

Precise Point Positioning
• IGS combined Orbits, clocks held fixed in single point solutions– Equivalent to back substitution into complex, global (IGS) solutions
• An efficient, flexible and convenient interface/access to the “IGS reference frame”– mm precision level for static point positioning worldwide, no base
(IGS Polyhedron) station positions/data required– cm precision level for (epoch by epoch, ground, air, LEO sarellite)
navigation, no base (DGPS) station positions/data required. – Efficient and precise solutions for station clocks and tropospheric
ZPDs• Disadvantages (wrt to double differencing/relative positioning)
– More difficult to clean/edit data and/or to fix integer phase ambiguities
– Sensitive to clock errors and to incompatibilities (see below) and even small reference (ITRF) changes; orbits/clocks/ERP must be consistent!
– Correlation/variance matrix (amongst stations) lost and not available, thus not well suited for national/continental ITRF (SINEX) densification

Precise Point Positioning
Static Point Positioning Requirements (undifferenced phase/pseudorange data; < 1 h occupancy)
IGS Products/precision < 1 cm 1 – 10 cm 10 – 100 cm >100 cmIGS Orbits IGS Final IGS Rapid/Final IGS Rapid/UltraR No (Broadcast)IGS ERP*** No No No NoIGS Sat Clocks IGS Final IGS Rapid/Final IGS Rapid/UltraR No (Broadcast)IGS Iono Delays No** No** IGS iono* IGS iono*IGS Tropo Delays Estimate Estimate/IGS tropo IGS tropo/estimate Standard/nominalIGS ITRF Trasform Yes No No No
ERROR MODELSIGS Ant phase centre Yes Yes No NoSolid Earth tides Yes Yes Yes NoOcean loading Yes Yes No NoRelativity corrections Yes Yes Yes YesSat phase wind up Yes Yes No No
* Single frequency data; ** Two frequency data; *** IGS ERP implied by IGS Orbits
Note: in near future, the Ultra Rapid IGS orbits (Ultra R ) <12 h prediction) is to replace the IGS Predicted (IGP) Orbits (<48h prediction)

Static GIPSY ppp sigmas (AUCK, BRUS, USUD, WILL) , new clock combination, corrected for orbit origin offsets: IGSN-all ACs; IGS1-ESA
excl.; IGS2-ESA, COD excl.
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
CODE EMR GFZ IGSN IGS1 IGS2 IGS JPL
AC/IGS Final orbit/clock
sig
ma
/me
tre
s
North
East
Up
Precise Point Positioning (PPP)

Precise Navigation
Navigation/Kinematic Point Positioning Requirements (undifferenced phase and pseudorange data; instantaneous occupancy)
IGS Products/ precision < 10 cm 10 – 50 cm 50 – 500 cm >500 cm IGS Orbits IGS Final IGS Rapid/Final IGS Rapid/Final No (Broadcast) IGS ERP *** No No No No IGS Sat Clocks IGS Final IGS Rapid/Final IGS Rapid/Final No (Broadcast) IGS Iono Delays No** No** IGS iono* IGS iono* IGS Tropo Delays Estimate Estimate/IGS tropo IGS tropo/estimate Standard/nominal IGS ITRF Trasform Yes No No No
ERROR MODELS IGS Ant phase centre Yes No No No Solid Earth tides Yes Yes No No Ocean loading Yes No No No Relativity corrections Yes Yes Yes No Sat phase wind up Yes No No No * Single frequency data; ** Two frequency data *** IGS ERP implied by IGS Orbits

Comparison of Point Positioning Results
at Three Stations
Final IGS Obits/clocks, Precise Point Navigation
0
5
10
15
20
25
30
35
948 952 956 960 964 968 972 976 980 984 988
3D
RM
S (
cm
)
BRUS USUD WILL

Compatibility
• IGS CORE products (orbits/clock/ERP/stations)
– Mutually compatible and consistent since Dec 1998
– Consistency of orbits and clocks is of utmost importance for precise point positioning
– IGS station (SINEX) solutions are compatible/consistent with IGS antenna offsets (station log files) and the antenna calibration (phase center) tables (IGS_01.pcv) at IGSCB Archives
– IGS satellite clock solutions are based on/compatible with the following assumptions/conventions:
• Periodical special relativistic correction : - 2 . X .V/c2 applied• Cross correlation type of pseudoranges : C/A; P2’= C/A + (P2-P1)
: P1, P2 (After April 2, 2000, Wk 1056)
• Adopted satellite antenna offsets (X,Y,Z m)– Block II/IIA : 0.279 0.000 1.023 (in the satellite fixed frame)– Block IIR : 0.000 0.000 0.000
• no L1-L2 satellite/receiver calibration delayed applied
– Ionospheric TEC grid maps, satellite/receiver calibration biases must be of the same solutions and
• corresponding mapping function and DCB’s must be used for all ionospheric applications (to derive slant ionospheric delays)

Compatibility
Solid Earth tides have once and twice daily periods; can reach up to 300 mm in height and up to 50 mm in latitude and longitude.

Compatibility
Ocean Loading Effects have once and twice daily periods; can reach up to 50 mm in height and up to 10 mm in latitude and longitude.

Scientific Applications• Earth Orientation Parameter (EOP) monitoring
– IGS Polar Motion rates of unprecendeted precision (0.1 mas/day) and resolution (1 day, or even 2 hours for CODE AC solutions!)
– Continuously available with delays of less than 24h (IGS Rapid)– Independent short period (<30 days) nutation determination (by
CODE AC)
• Global Change Studies– Correlation studies of ERP rates Atmospheric (AAM) and Oceanic
Angular Momentum (OAM)– Water vapor studies (TZPD, MET LEO satellite missions)– Gravity LEO satellite missions (CHAMP, GRACE, etc.)– Ionospheric studies and correlation with EOP, atmosphere, etc.
• Precise time/frequency transfers– Current limitation - temperature calibration/control– Potentially at a few tens pico seconds or below the 10-15/day level

Scientific Applications 30 day correlation of IGS Polar Motion X rates with O+AAM (Xrt/X2oa) and
AAM (Xrt/X2a) during Jan. 95- Apr 96.
0
0.2
0.4
0.6
0.8
1
49700 49800 49900 50000 50100 50200
MJD
CO
RR
EL
AT
ION
0
0.25
0.5
0.75
1
1.25
ma
s/d
Xrt/X2oaXrt/X2aSigOASigA
Correlation between Polar Motion Rates (Xrt, Yrt (not shown)) and OAM+AAM is nearly always better than 0.8 (except for the low signal period at or below 0.25 mas/d)

Water Vapor Estimates Comparison
at Station Potsdam
Partial Water Vapor (PWV) from GPS at IGS station POTS (Germany) agrees with Water Vapor Radiometer (WVR), well within one mm (Courtesy of GFZ).

Limitations and Solutions
• IGS Combined Orbits :– In 24 h files with 15 min sampling (0-23:45 GPS time); can be
easily concatenated to span daily boundaries; easily be fitted with low order polynomials for continuous representation
– Small daily discontinuities (at the dm level)– Possible orbit origin offsets (biases at the cm level)– Improvements at the AC level, I.e. smaller daily AC orbit
discontinuities (<dm) and smaller orbit origin offsets (< cm) required
• IGS Combined ERP:– May be biased at the .1 mas level due to AC ERP biases– New IGS SINEX ERP combination should help (started Feb 20,
2000)• IGS Combined Clocks (see also compatibility):
– Daily clock discontinuities (< 1 ns)– New- improved station clock combinations: improved editing,
orbit/clock consistency, smaller daily AC clock solution discontinuities

Recent Changes and Improvements
• IGS Preliminary SINEX Combined Products became official– From Feb 20/00 (GPS Week 1050), aligned to ITRF97 ( using min.
constraints) – See IGS Mail #2740 for more details
• New IGS ITRF97 realization (through the IGS SINEX combined solution IGS00P04.snx product)– From Feb 27/00 (GPS Week 1051); delay increased from 10 to 12
days– Improved ITRF97 realization for the IGS Final orbits/ERP/clocks– No noticeable changes to the IGS users (no transformation, no
steps!)– See IGS Mail #2750 and #2751 for more details
• New Pseudorange bias convention starts on Apr 02/00(wk 1056)– P1, P2 replace the current convention: C/A, P2’= C/A + (P2-P1)– Important for IGS clock users (precise point positioning, time
transfers) – See IGS Mail #2744 for more details and the adopted C/A-P1 biases
• IGS Ultra-Rapid Comb. Orbits/clocks testing started Mar 2/00!

Future Developments
• Improved IGS ITRF realization (see the next presentation)– Weekly, Preliminary SINEX combinations, official since Feb 20, 2000– Up to 250 IGS Polyhedron stations IGS Combined SINEX solutions– Continuous plate motion monitoring/quality check (under way)
• Ultra Rapid products Pilot Project (<50cm, testingsince March 2, 2000)– 3 hour delivery delays, may replace both IGR & IGP in near future – 48h orbits, twice daily, increased reliability for prediction portions
(<12h)
• Improved IGS satellite/station clock combinations (April 2000 )– 5 min. Station/sat. clock combinations, improved editing, orbit/clock
consistency– Clock alignment to UTC (IGS/BIPM Time transfer Pilot Project)– To support LEO POD and precise, cm navigation at any interval
• Ionospheric (global) TEC products to become official ?

QUESTIONS?
Jan KoubaGeodetic Survey Division
Natural Resources Canada (NRCan)615 Booth Street
Ottawa, Canada K1A [email protected]
Tim Springer (The IGS AC Coordinator)Astronomical Institute, Univ. Bern
For details on IGS Products, see the IGS Annual Reportshttp://igscb.jpl.nasa.gov/overview/pub.html