Embed Size (px)
Citation preview
![Page 1: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/1.jpg)
J. R. Soc. Interface
*Author for c
Electronic sup10.1098/rsif.2
doi:10.1098/rsif.2010.0678Published online
Received 30 NAccepted 28 J
Mechanical models of sandfishlocomotion reveal principles ofhigh performance subsurface
sand-swimmingRyan D. Maladen1, Yang Ding2, Paul B. Umbanhowar3,
Adam Kamor2 and Daniel I. Goldman1,2,*1Bioengineering Program, and 2School of Physics, Georgia Institute of Technology,
Atlanta, GA 30332–0250, USA3Department of Mechanical Engineering, Northwestern University, Evanston, IL 60208, USA
We integrate biological experiment, empirical theory, numerical simulation and a physical modelto reveal principles of undulatory locomotion in granular media. High-speed X-ray imaging of thesandfish lizard, Scincus scincus, in 3 mm glass particles shows that it swims within the mediumwithout using its limbs by propagating a single-period travelling sinusoidal wave down its body,resulting in a wave efficiency, h, the ratio of its average forward speed to the wave speed, ofapproximately 0.5. A resistive force theory (RFT) that balances granular thrust and dragforces along the body predicts h close to the observed value. We test this prediction againsttwo other more detailed modelling approaches: a numerical model of the sandfish coupled to adiscrete particle simulation of the granular medium, and an undulatory robot that swimswithin granular media. Using these models and analytical solutions of the RFT, we vary theratio of undulation amplitude to wavelength (A/l) and demonstrate an optimal condition forsand-swimming, which for a given A results from the competition between h and l. The RFT,in agreement with the simulated and physical models, predicts that for a single-period sinusoidalwave, maximal speed occurs for A/l � 0.2, the same kinematics used by the sandfish.
Keywords: locomotion; granular; modelling; robot; lizard; swimming
1. INTRODUCTION
Discovering principles of locomotion for organisms innatural environments requires integrating experimentalvisualization [1–4], theoretical [5–7], computational [8–10] and robotic [11–14] approaches to generate and testhypotheses of interaction between a locomotor and itssurroundings [9,15–17]. These approaches have pro-duced an understanding of locomotion biomechanics ina range of terrestrial, aquatic and aerial environments[18–21]. Comparable analysis of locomotion within yield-ing substrates like sand, soil and debris that displayboth solid and fluid-like behaviour is less developed[9,22–25]. This is, in part, because visualizing motion inopaque materials is challenging, and validated forcemodels on and within these substrates at the level ofthose that exist for fluids (see [19,26,27]) do not exist yet.
Attempts to understand burrowing and movementwithin granular media like desert sand directly confrontthese issues. Subsurface locomotor behaviours are rel-evant to a diversity of organisms, such as scorpions,
orrespondence ([email protected]).
plementary material is available at http://dx.doi.org/010.0678 or via http://rsif.royalsocietypublishing.org.
ovember 2010anuary 2011 1
snakes and lizards, that move within the sand toescape heat and predators, and to hunt [28–30]. Toanswer questions about ecological adaptations [28,31–33] and evolution [34–36] in flowing substrates requiresan understanding of how propulsion is generated andhow both media interactions and animal kinematicsenhance or limit locomotor performance.
Recently, we used high-speed X-ray imaging to visualizethe locomotion of a small desert lizard, the sandfish,Scincus scincus, within approximately spherical 0.3 mmdiameter glass particles, a granular medium representativeof desert sands [37]. We found that once it buries rapidly(within one-half of a second) into the sand, the animalswims subsurface at up to 2 bl s21 (bl, body-length isdefined as the distance from the snout tip to the base ofthe tail) by propagating a sinusoidal wave down its body(anterior to posterior) without using its limbs [22]. Theanimal monotonically increases speed by increasing itsoscillation frequency while using the same undulatory kin-ematics (a single-period sinusoidal travelling wave with anamplitude to wavelength ratio of approximately 0.2) evenwithin media prepared to different initial yield strengths(controlled via volume fraction or ‘media compaction’).
Developing models to describe subsurface loco-motion requires understanding resistive forces on
This journal is q 2011 The Royal Society
![Page 2: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/2.jpg)
2 Models of undulatory swimming in sand R. D. Maladen et al.
intruders and how intruders change the local properties ofthe media [38]. As a broadly applicable theory of intrusioninto granular media does not yet exist in the regime rel-evant to sand-swimming, in the study of Maladen et al.[22] an empirical resistive force theory (RFT) was devel-oped to predict the wave efficiency h—the ratio of theforward swimming speed to the wave speed. The granularRFT was inspired by the theory used to predict swimmingspeeds of micro-organisms [39] in fluids at low Reynoldsnumbers (Re), where inertial effects are small, and bal-ances empirically measured estimates of drag and thrustforces on elements of the animal. The RFT demonstratedthat body undulations are sufficient to propel the sandfishforward, and its prediction ofhwas close to the observedh.
The RFT predictions are based on a simplified modelof the animal kinematics and an empirical model of thegranular resistive forces on the body. In this paper, wedescribe the development of two, more detailed andflexible models of undulatory sand-swimming that repro-duce the observed biological sand-swimming and exhibitperformance in accord with predictions of the RFT. Inthe first, a computer simulation approach, we couple anumerical model of the sandfish with a multi-particlediscrete element method (DEM) [40] simulation of thegranular medium. In the second approach, we measurethe locomotor performance of a physical model (arobot). We use all three models to study how the wavekinematics of the rapidly escaping sandfish maximize for-ward swimming speed within the granular media. Moregenerally, these complementary modelling approacheswill allow us to explore and answer questions aboutundulatory locomotion in complex, yielding media.
2 BIOLOGICAL EXPERIMENTS
Weuseanair-fluidizedbed tocontrol the initial preparationof the material. The packing state of the substrate is para-metrized by the volume fraction f, the ratio of solid tooccupied volume [41] of the granularmedium.Thefluidizedbed is a box of area 21.5 cm� 18 cmwith aporous base andis filled with granular material 10 cm deep. A continuousflow of air through the base expands the granular mediumin the bed to a lowf state; subsequent pulses of air increasecompaction allowing precise control of the initial volumefraction of the bed. All air flow through the bed is turnedoff before the animal is released onto the medium. We usehigh-speed X-ray imaging to record the movement of thesandfish, Scincus scincus, as it swims subsurface (forfurther experimental details, see [22]).
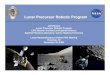
In the work of Maladen et al. [22], we studied sandfishlocomotion within 0.27+0.04 mm diameter approxi-mately spherical glass particles, close in size to the sandfound in the animal’s natural environment [42]. Here, westudy swimming in larger spherical glass particles (diam-eter: 3.2+0.2 mm, referred to here as ‘3 mm particles’) toreduce the time required to simulate the granular medium(figure 1a,b). High-speed X-ray imaging experimentsreveal that the sandfish (five animals; mass¼ 16.9+4.0g; body-length (bl) L¼ 8.8+3.3 cm) swims subsurface inthe 3 mm particles with performance comparable to thatin the 0.3 mm particles. The sandfish are tested in loosely(f ¼ 0.60) and closely (f¼ 0.62) packed media
J. R. Soc. Interface
preparations and take 1.2+0.6 s to complete the burialprocess (time from entry until tail is not visible) inde-pendent of media preparation. Interestingly, althoughswimming performance is comparable in the two beadsizes, the burial time in the 3 mm particles is significantlylonger than in the 0.3 mm particles. Once subsurface, theanimal places its limbs along its sides and advances byexecuting an undulatorymotion (see electronic supplemen-tary material, movie S1). We quantify the subsurfacemotion by tracking the mid-line of the animal.
As in the study of Maladen et al. [22], all phases ofthe undulatory motion of the animal midline are well-fit by a posteriorly travelling single-period sinusoidalwave (R2 . 0.9)
y ¼ A sin2plðx þ vwtÞ; ð2:1Þ
with y the displacement from the mid-line of a straightanimal, A the amplitude, l the wavelength, f the wavefrequency, vw¼ f l the wave speed, t the time and xthe distance along a line joining the endpoints of theanimal and parallel to the direction of motion. The x andy coordinates are set in the laboratory frame. The numberof periods along the body of the swimming animal, j, isapproximately 1.0 in experiment. The spatial character-istics of the wave, A and l, do not vary significantlywithin a run or between runs and their ratio is conservedat approximately A/l¼ 0.25+0.07. A (average 0.18+0.03 bl, p¼ 0.26) and l (average 0.7+0.1 bl, p¼ 0.13)are not significantly different for loosely and closelypacked media preparations. A p-value greater than 0.05indicates that no statistically different relation existsbetween the measured values for the different conditionstested [43]. As within 0.3 mm particles [22], the animalincreases its forward velocity by increasing its undulationfrequency (figure 1d).
A measure of performance of undulatory locomotion indeformable media is the wave efficiency (also referred toas the ‘amount of slip’; [44]),h, the ratio between the aver-age forward velocity of the animal vx and the velocity ofthe wave travelling down its body vw. Typical values ofh for small organisms (such as nematodes) for whom iner-tial effects are negligible are 0.22+0.02, while swimmingin fluids at low Re [39] and 0.8–0.9 while creeping alongan air–solid interface [44–46]. Because A/l for sandfishis independent of f, h is the slope of the vx/l versusf curve (figure 1d). For 3 mm particles, h ¼ 0.54+0.13(figure 1d,e), similar to the value of 0.52+0.02 for loco-motion in 0.3 mm particles [22]. For both particle sizes,h is independent of media preparation.
3. RESISTIVE FORCE THEORY FORGRANULAR MEDIA
We use a previously developed RFT [22] for granularmediato predict h. The RFT assumes that the animal swims in ahorizontal plane, although it actually moves into themedium at an angle relative to the horizontal of approxi-mately 228 in 0.3 mm particles [22] and approximately298 in the 3 mm particles. We discuss the validity of thisassumption in §7. In RFT models, the body of the loco-motor is partitioned into infinitesimal elements along its
![Page 3: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/3.jpg)
f (Hz)
simexp
RFT
h
v x /l
(s–1)
2 40
1
2
0
0.5
1.0sim
expRFT
0 12
4
2
6
0.50 time (s)
y (c
m)
loose pack close pack
x (cm)
1cm
(a)
(c)
(d) (e)
(b)
Figure 1. Kinematics, speed and wave efficiency of the sand-swimming sandfish lizard Scincus scincus and predictions fromgranular resistive force theory (RFT) and numerical simulation.(a) The sandfish lizard on 3 mm glass particles. (b) X-ray imageof sandfish swimming subsurface in 0.3 mm glass particles. (c)Trackedmid-line of the sandfish showsthe kinematics as it propelsitself using body undulations within a granular medium of 3 mmglass particles. (d) Average forward swimming speed versusundulation frequency in 3 mmparticles. Solid symbols refer tobio-logical measurements, and the solid and dashed lines correspondto the RFT (for a flat head) and simulation (for a tapered head)predictions, respectively. (e) Wave efficiency (h), the ratio of theforward swimming speed to the wave speed as determined fromthe slope of vx/l versus f measured in (d) for biological data,RFT and numerical simulation in 3 mm particles. For the RFT(solid colours), the lower and upper limits of the h deviation(cyan (loosely packed) and (orange (closely packed)) correspondto maximum (flat head) and 30 per cent of the maximum headdrag, while the simulation (hatched) corresponds to the flat andtapered head shapes, respectively. Blue and red colours in (d)and (e) correspond to loosely and closely packed mediapreparations, respectively.
F^
(N
)
F^
F||
(N)
F||
3 2 1
y
(a)
v
vx
vw
2A
(b)
(c)
F
0
2
0
3
6
y (rad)
p/2
q
p/3p/6
ds
b
d
l
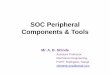
Figure 2. Resistive force theory (RFT) for granular media inwhich the sandfish is (a) approximated by a square cross-section tube along which a single period sinusoidal travellingwave propagates head to tail. As the tube moves through themedium, a force acts on each element of the tube and the forceis resolved into parallel (Fk) and perpendicular (F?) components.ds and d refer to the length of the element in the RFT and dragexperiments, respectively. (b) Fk and (c) F? from simulation of3 mm glass particles on the length (blue open circles) and at theend caps (green closed circles) of the square cross-section rod asa function of the angle (c) between the velocity direction andthe rod axis. Regions 1–3 separated by dashed black verticallines correspond to similarly marked regions of the relationshipbetween h and A/l in figure 6a. (Online version in colour.)
Models of undulatory swimming in sand R. D. Maladen et al. 3
length. When moving relative to the medium, each elementis acted on by resistive forces (figure 2a) that can bedecomposed into thrust and drag components. Resolvingthese forces into perpendicular (F?) and parallel (Fk)components, the net forward force on an element is
dFx ¼ dF? sinu� dFk cos u; ð3:1Þ
where u is the angle between the direction of the averagevelocity of the organism and the instantaneous orientationof the infinitesimal element. u increases with the oscillationamplitude and can be obtained by differentiatingequation (2.1):
tan u ¼ dydx¼ 2Ap
lcos
2plðx þ vwtÞ: ð3:2Þ
For granular media, the force on an element is wellcharacterized as a function of only the direction of the
J. R. Soc. Interface
velocity relative to its orientation (c) since in thespeed regime relevant to the animal previous studies,Maladen et al. [22], Albert et al. [47] and Wieghardt[48], showed that granular force is independent ofspeed. Determining the y-component of the velocityfrom equation (2.1)
vy ¼dydt¼ 2Apvw
lcos
2plðx þ vwtÞ ð3:3Þ
allows us to write the angle c as
c ¼ tan�1 vy
vx
� �� u: ð3:4Þ
![Page 4: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/4.jpg)
4 Models of undulatory swimming in sand R. D. Maladen et al.
The net forward force on the entire body is calculated byintegrating the force on each element over the length ofthe body (snout to tail tip). Since the body propagates asingle period wave ( j¼ 1) and the force on a segment isassumed to be localized, propagation of the wave in essencemoves a segment from one end of the body to the other endwith the orientation, velocity and force on that segmentunchanged. Therefore, the net force, the sum of the forceson all segments, is time-invariant. The drag on the forwardsurface of the head (element end cap), Fhead, is averagedover a cycle. To estimate the average forward speed, theforces on the body and head are summed and set to zero.Assuming that the forces on an infinitesimal body elementare proportional to the area of the sagittal cross section(bds, where b is the height of the element, andds ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ tan2up
dx is the arc length) and are functionsof c, the total time-averaged force on the sandfish can beexpressed as:
�Fx ¼ðl
0ðP?sin u� Pkcos uÞ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ tan2u
pb dx þ �Fhead;
ð3:5Þ
where P? and Pk are stresses perpendicular and parallel tothe axis of each element. By assuming a constant averagevelocity (net forward force along the body equal to zero),the speed of the organism and thus h can be determined.Motion and force only in the forward direction areconsidered.
Unlike in fluids, in an arbitrary granular medium, novalidated theory exists to calculate the resistive forceson an element as a function of its angle relative to itsvelocity direction (c). Previously, Maladen et al. [22]obtained these force laws empirically at different c in0.3 mm glass particles—the same granular mediumin which the animal was tested in [22]. To estimatethrust and drag on the body and head of the organism(figure 2a), empirical fitting functions were used to sep-arate the forces on the rod into terms describing thesurface along the length (side) and end-cap of the rod.
Here, to avoid the approximations introduced byusing empirical laws to resolve side and end-capforces, we use a validated simulation of the granularmedium to directly measure the surface forces actingon the dragged rod. The granular medium is simulatedusing a three-dimensional soft sphere discrete elementmethods (DEM) code [40]. To compute particle–particleand particle–intruder interaction forces, we calculate thenormal force [49], Fn, and the tangential Coulombfriction force, Fs (see figure 3c) at each contact using
Fn ¼ kd3=2 �Gnvnd1=2
and Fs ¼ mFn;
)ð3:6Þ
where d is the virtual overlap between contacting particles,vn ¼ ð~V1 � ~V2Þ � n (see figure 3c) is the normal componentof relative velocity with n the unit vector along the line con-necting the particles centers, and k and Gn represent thehardness and viscoelastic constants, respectively. m refersto the particle–particle (mpp) or body–particle (mbp) fric-tion coefficients depending on which objects are incontact. For specific values, see electronic supplementarymaterial, table S1. The simulated medium (a 50 : 50
J. R. Soc. Interface
bi-disperse mixture of 3.4 and 3.0 mm glass particles, withdensity 2.47 g cm23, which we will refer to as 3 mmparticles) is validated by comparing the forces on a cylind-rical stainless steel rod (diameter¼ 1.6 cm, length¼ 4 cm)draggedhorizontally through itwith those fromexperiment(see electronic supplementary material, figure S1).Particle–particle restitution and friction coefficients areexperimentally measured, while the hardness is selectedsuch that particle overlap (d) is less than 0.4 per cent ofparticle radius. The container holds a granular volume25 � 24 � 17 cm3 in extent. We obtain a match betweenthe force measured as the rod is dragged through the gran-ular media in experiment and simulation as a function oftime (see electronic supplementary material, figure S1a).The mean deviation between experimentally measuredaverage drag force and simulated average drag force as afunction of angle is less than 5 per cent (see electronicsupplementary material, figure S1b).
The simulation allows direct measurement of the forceson the side and end caps of the rod separately from whichwe obtain F? and Fk (figure 2b,c). To estimate the effectof head drag, only forces on the leading end cap areconsidered. We note that F? and Fk are measured on asquare cross-section rod (width, height b ¼ 1.6 cm,length d ¼ 4 cm), as we approximate the cross section ofthe sandfish as a square. The fitting functions used toobtain continuous functions from the discrete measure-ments of F? and Fk are reported in the electronicsupplementary material. P? and Pk are obtained usingthe relation P? ¼ F?/bd and Pk ¼ Fk/bd. We measurethe forces within both loosely and closely packed media(see electronic supplementary material, figure S3).
To determine h using the RFT, we assume that theanimal swims at constant speed, which implies thatthe net force integrated over the body is zero (i.e. �Fx ¼ 0in equation (3.5)). Substituting F? and Fk from the simu-lation and using the spatial characteristics of the animal,A/l¼ 0.22 (close to the average A/l measured in 0.3 [22]and 3 mm particles) and j¼ 1, we numerically solveequation (3.5) using an unconstrained nonlinear optimiz-ation, which finds the minimum of a scalar function ofseveral variables starting at an initial estimate. With aflat head (maximum drag) this procedure yields h ¼ 0.66in loosely packed and h¼ 0.59 in closely packed media;both values are larger than that measured for theanimal (h¼ 0.54+0.13; figure 1d,e). We discuss thisdifference in §7.
4. NUMERICAL AND ROBOTICMODELLING APPROACHES
To better model the animal and test the predictions ofthe RFT, we develop two complementary models of thesandfish in which parameters can be readily varied: anumerical simulation that combines a model of theanimal with the validated granular medium model, and asandfish inspired physical robot that is tested in a granularmedium. These tools also allow us to investigate the effectsof varying parameters like A, l and j, variables which wehave no control over in the biological experiment (§2).First we describe the development of the modellingapproaches and compare their predictions of h to the
![Page 5: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/5.jpg)
x (cm)
y (c
m)
time (s)
10 200
6
9
0 1.2
motion
xy
z
motor i – 1
motor i
motor i + 1
Fs
Fn V1
V2r
3 mm particles
b b
2A
tapered body
uniform body
t = 0 t = 1.2 s
(a)
(d)
(e)
(b)
(c)
l
bi
d
5 cm
Figure 3. Numerically simulated model of the sandfish (figure 1a). (a) Close-up view of the numerical sandfish with tapered body crosssection (approximating that of the animal) in 3 mm glass particles (particles above the sandfish model are rendered transparent). Insetshows the numerical sandfish with uniform body cross section. (b) Motor connections of a section of the simulated sandfish (i¼ 1 refersto the head). b indicates the width (maximum along the model) and height of the segments in the non-tapered section of the animalmodel. (c) Two representative contacting particles illustrating interaction forces given by equation (3.6). (d) Three-dimensional view ofthe 50 segment sandfish at three different instants while swimming within a container of particles rendered semi-transparent for visu-alization. The time for the simulated tapered head sandfish to swim across the container is approximately 3.5 s ( f¼ 2 Hz). (e) Mid-linekinematics of subsurface sandfish motion in simulation when swimming at f¼ 2.5 Hz. (Online version in colour.)
Models of undulatory swimming in sand R. D. Maladen et al. 5
RFT and the animal experiment. Then using eachapproach, we vary kinematic parameters to systematicallytest the RFT predictions as well as showan optimality con-dition for undulatory swimming in granular media.
4.1. Numerical sandfish simulation
The numerical simulation of the sandfish uses thecommercial software package Working Model 2D(Design Simulation Technologies). The model is divi-ded into 50 motor-actuated segments along its length(figure 3a). The angle of each motor is specified as afunction of time such that an approximate sinusoidal
J. R. Soc. Interface
wave travels posteriorly from head to tail (figure 3b).The angle (bi) between segments i and i þ 1 varies as
biðtÞ ¼ tan�1 2pAl
cos2pl
xiþ1 þ 2pft� �� �
� tan�1 2pAl
cos2pl
xi þ 2pft� �� �
; ð4:1Þ
where xi is the arc length measured from the tailtip to the ith segment and l is the body length. To com-pare performance of the numerical simulation to theRFT, the morphology of the simulated animal is approxi-mated as a square cross-section tube (figure 3a, inset).
![Page 6: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/6.jpg)
6 Models of undulatory swimming in sand R. D. Maladen et al.
The model does not incorporate limbs as the sandfishplaces its limbs along its sides during subsurface swim-ming (figure 1b). No tapering in height of the bodyalong its length is considered, as doing so results in themodel rising as it moves forward owing to drag-inducedgranular lift. This lift results from the vertical componentof the normal force on an inclined surface draggedthrough a granular medium and is discussed in Dinget al. [50] and Maladen et al. [51].
We perform simulations for a square tube bodyshape, and to more closely match the animal we per-form simulations using a model tapered in the coronalplane (figure 3a) with width varying linearly from thesnout tip to 1/6 bl, and from 3/5 bl to the tailtip. Model properties such as animal dimensions anddensity are taken from biological measurements (referto electronic supplementary material, table S1, forvalues). The segment height and maximum segmentwidth are both denoted by b for the model. Thebody-particle friction (mbp ¼ 0.27) was determined bymeasuring the angle at which an anaesthetized sandfishslid snout-first down a monolayer of 3 mm glassparticles glued to a flat plate [16]. For simplicity, weuse the same normal force parameters for both theparticle–particle and body–particle interactions.
The multi-segment model of the animal is combinedwith the previously described experimentally validatedDEM simulation of the granular medium (in a containerwith comparable dimensions to those in experiment, seeelectronic supplemental material, table S1) such thatWorking Model integrates the equations of motion of thecoupled links that represent the animal and the DEM cal-culates the resultant force from both the particle–particleand body–particle interactions. At each time-step, thenet force from particles contacting each segment is passedto Working Model, and velocity and position informationfor each segment is transferred back to the DEM simu-lation. The animal model kinematics are constrained toprevent rotation of the axis of the travelling wave out ofthe horizontal plane of motion (roll).
With a flat head and square tubular body and using A/l¼ 0.22 and j¼ 1 (from animal experiments), the simu-lated sandfish moves in loosely packed 3 mm particleswith h¼ 0.45, while for the same shape, the RFT predictsh¼ 0.66. With the tapered sandfish body in simulation,the forward velocity of the simulation increases linearlywith oscillation frequency, as in the animal experimentsand the flat head and square tubular body simulation,and the slope of the relationship, h¼ 0.57+0.01(figure 1d,e) is close to h ¼ 0.54 þ 0.13 observed for theanimal. Accounting for tapering along the sandfish bodyin the RFT is complicated as the taper at the head andtail can become leading and trailing surfaces at differentinstances. This violates an RFT assumption that the netforce can be decomposed into time-invariant body andhead terms. We estimated the amount of head dragreduction owing to tapering as approximately 30 per cent(in accordwith drag-reductionmeasurements [52]) by com-paring the integrated drag force on the flat head to thetapered head in simulation. The RFT for the reducedhead drag over-estimates the wave efficiency, predictingh¼ 0.75. We discuss potential reasons for the differencesin h between simulation and RFT in §7.
J. R. Soc. Interface
4.2. Sandfish-inspired robot
To test the RFT and numerical simulation predictionsin a real world environment, we built a physicalmodel, a robot. Robots complement the theoreticaland numerical modelling approaches because physicallaws that govern the interaction with the granularmedium need not be simulated.
The basic mechanical design of our robot is adaptedfrom previously developed snake robots [53], which con-sist of modules (motors) with a single joint that permitsangular excursions in the body plane and that areconnected via identical links to form the body. Ourdesign employs six standard size (4� 3 � 3.7 cm3) servo-motors (Hitec, HSR 5980SG) and a passive segment(the head) with the same weight and form factor as amotor with its attached connectors for a total of seven seg-ments. Each servomotor is powered in parallel from a 7.4 V,30 A power supply. The pulse width-based control signalfor eachmotor is generatedusingLabVIEWas a single ana-logue waveform initially determined from equation (4.2),output from a PCI-card (NI-6230) and transmitted via amultiplexer to each motor as control input.
Preliminary tests of the robot revealed that the kin-ematics prescribed by the sinusoidal travelling wave(equation (4.1)) are accurate only for low amplitudesbecause of the finite segment length associated with afinite number of segments (fixed total length). To obtaina larger range of amplitudes, we implemented an openloop controller that modulates the angle between adjacentsegments using
biðtÞ ¼ b0j sinð2pji=N � 2pftÞ; ð4:2Þ
where bi(t) is the angle between the i and iþ 1 motor attime t,b0 is the angular amplitude, j is the number of wave-lengths along the body (period) and N is the number ofmotors. We experimentally verified that the motors areable to achieve the prescribed joint excursions by observingthe kinematics of the robot subsurface using X-rayimaging.
To reduce themotor torque requirements,weuse 5.87+0.06 mm plastic particles with particle density¼ 1.03+0.04 g cm23 as our granular medium (see electronic sup-plementary material, table S1, for details); we refer tothese particles as ‘6 mm particles’. The granular bed is110 cm � 40 cm and filled 14 cm deep. To prevent particlesfrom intruding between motor segments and jamming thedevice, we encase the robot in a double-layer skin; a lycraspandex sleeve with a single seam (located at the top ofthe device) is slid over a snugly fitting elastic latex sleevethat prevents particles from getting between the motorsduring phases of the motion when the lycra sleeve is loose.The outer layer reduces the wear on the thin inner layer,allowing greater than 100 subsurface trials without replace-ment of the inner layer. The control and power wire bundleis run along the top of the motors (under the inner latexsleeve) to a mast on the last segment and is tetheredabove the container.
Overhead video (100 fps) is collected for each exper-iment. To track the subsurface position of the robot, alightweight mast is attached to the first and lastmotor segment with a marker (visible above ground)(figure 4a,e). The kinematics of the subsurface motion
![Page 7: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/7.jpg)
bi = 1
x (c
m)
0 30 60y (cm)
15
motiontail head
head
headhead
tail 5 cm
5 cm
tail
(a) (b)
(c)
(e)
(d)
motor 2
motor 1head
Figure 4. Robot model of the sandfish (a) resting in a container filled with 6 mm plastic particles and (b) swimming subsurface inthe same particles (X-ray image). Inset in (b) shows the motors (segments) of the robot connected via c- and l-brackets withoutskin.(c) Three-dimensional rendering of the numerically simulated robot swimming in 6 mm particles. (d) Simulated robot show-ing the angle between adjacent segments (bi) given by equation (4.2). (e) Circles in green and triangles in blue correspond to thetracked position of the head and tail segments of the robot as it swims subsurface in experiment and simulation, respectively.(Online version in colour.)
Models of undulatory swimming in sand R. D. Maladen et al. 7
of the robot are also verified using X-ray video (figure 4b)for a representative condition. For each test, the robot issubmerged 4 cm (from its top) into the medium and thesurface is levelled and smoothed. At least 1.5 cycles ofmotion are collected for each trial (see electronicsupplementary material, movie S3).
Like the sandfish lizard and the RFT and numericalsimulation models, the forward velocity of the robotmonotonically increases with increasing f (figure 5a)for A/l ¼ 0.2 and a single period wave. However,for the robot, h ¼ 0.34+ 0.03, significantly below the
J. R. Soc. Interface
values measured for the animal in experiment, andpredicted by the RFT and animal numerical simulation.
We speculate that the h of the robot is less than thatof the sandfish in biological experiment, RFT andnumerical models because the small number of seg-ments do not allow the robot to achieve a smoothsinusoidal profile. To investigate segment numbereffects, rather than increasing the number of motorsin experiment, we adapt the numerical sandfish simu-lation to match the robot and its granular mediumin physical dimension, mass and density (figure 4c).
![Page 8: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/8.jpg)
f (Hz)0 10
0.4
(a)
(b)
N = 5 N = 15 N = 48
20 400
0.3h
0.6
number of segments
v x/l
(s–1)
0.2
Figure 5. Comparison of robot experiment and simulation in6 mm plastic particles. (a) Forward velocity increases linearlywith undulation frequency in experiment (green open circles)and simulation (blue solid triangles). The slope of the dashedblue (simulation) and solid green (experiment) lines is thewave efficiency h with value 0.34+ 0.03 in experiment andh¼ 0.36+0.02 in simulation. (b) h versus number of segments,N, for a fixed length robot plateaus at N � 15. The green boxcorresponds to the seven-segment robot in experiment whilethe horizontal black bar is the RFT prediction, h¼ 0.56 for acontinuous robot body. Inset: schematics of 5-, 15- and 48-seg-ment robots correspond to the h marked with similarlycoloured (cyan, red and black) triangles. The robot simulationwas tested at f¼ 2 Hz. For (a) and (b) A/l¼ 0.2. We do notsolve the RFT for the finite (7) segment robot as the resultingcomplex mathematical description provides less insight thanthe numerical simulation of the robot. (Online version in colour.)
8 Models of undulatory swimming in sand R. D. Maladen et al.
We do this in simulation as increasing the number ofmotors experimentally is challenging: doing so wouldrequire an increased number of smaller motors withhigh torque requirements to maintain the same totallength as the seven-segment robot.
The simulated robot, like the actual device, consistsof seven segments and the angle between adjacentsegments is modulated using equation (4.2). The robotmodel is tested in a validated granular medium consist-ing of a 50 : 50 bi-disperse mixture of 5.81 and 5.93diameter particles; we will refer to this mixture as‘6 mm plastic particles’. To validate the simulatedmedium and obtain the values of mpp, k and Gn
given above, we dropped an aluminium ball (diameter6.35 cm and mass 385 g) into the plastic particleswith varying impact velocity (0.5–3 m s21) in bothexperiment and simulation and set grain interaction par-ameters to best match the measured and simulatedpenetration force during the impact collision as a func-tion of time (see electronic supplementary material,figure S2 and table S1). With parameters determinedfrom impact at v ¼ 1.4 m s21, the force profile fits well
J. R. Soc. Interface
at other impact velocities. In additional experiments,we directly measured the friction (particle–particleand particle–lycra skin) and restitution (particle–par-ticle) coefficients for the plastic particles and foundthem to be within 5 and 10 per cent of the fittedvalues, respectively. The robot simulation results quanti-tatively match the robot experimental results (figure 5a)with velocity linear in f and h ¼ 0.36+ 0.02 (see elec-tronic supplementary material, movie S4).
Increasing N (for a fixed length device) in the robotsimulation causes the robot to advance more rapidlyand with greater h until N � 15, above which h remainsconstant at 0.54 (figure 5b), resulting in a performancecomparable with that of the animal. h obtained fromthe RFT for a robot with a continuous profile (i.e. N ¼1) swimming in 6 mm plastic particles is nearly thesame (black horizontal line, figure 5b). For the empiricalforce laws used in the RFT to predict h refer to electronicsupplementary material, figure S4. For the smoothrobot, the animal in 0.3 mm (loosely and closely packedmedia) [22] and 3 mm particles (§2), and in model predic-tions (§§3 and 4) in simulated 3 mm glass particles, thevalues of h are all close to 0.5. This suggests that subsur-face locomotion in granular media is largely independentof media properties like particle size and density [51].
We postulate that h increases with increasing Nbecause a smoother body profile facilitates media flowand leads to decreased drag and/or a decreased variationin the spatial form (A/l) from the prescribed sinusoidaltarget (as much as 30% for A/l ¼ 0.2 with N ¼ 7). Ourfinding that for N . 15, h saturates at a value close tothat observed in the animal suggests that near-maximalperformance occurs when the spatial form of the robotmatches well a travelling sinusoidal wave.
5. VARIATION OF THE SINUSOIDALKINEMATICS OF SAND-SWIMMING
To this point, we have limited our investigation of sand-swimming to parameters used by the sandfish, i.e. asinusoidal travelling wave with fixed kinematics(A/l � 0.2 and j ¼ 1). We now use each of our threemodels to investigate how swimming depends on vari-ation of the spatial form of the sinusoidal wave. Thisallows us to systematically test our models and toadvance an argument for why the rapidly escapinganimal uses only a limited range of A, l and j.
We first discuss the RFT prediction of h for a fixedlength sandfish model at fixed period ( j ¼ 1) withvarying wave amplitude such that 0 , A/l , 0.6(figure 6a). Solving equation (3.5) numerically revealsthat h increases monotonically with increasing A/l:slowly for small A/l, rapidly for intermediate A/land slowly towards a plateau for large A/l.
We compare the functional form of h versus A/l fromthe RFT to the results from the numerical model withboth constant and tapered cross section (figure 6a) andfind that while the shape of the curves are similar,the RFT predictions (for the square cross section andfor the reduced head drag) systematically overestimateh. However, scaling the net force (equation (3.1)) oneach element (excluding the head) by a factor of 0.5
![Page 9: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/9.jpg)
h
h
0
0.6
0.3
0.2 0.60
0.5
1.0
A/l
l/L
0 0.2 0.60
p ⁄2
p ⁄3
p ⁄6
A/l
aver
age
|y| (
rad)
0
0.4
0.8
(a)
(b)
(c)
1 32
0.4
0.4
animalsimulation
RFT
animal
scaled RFT
robot simulationrobot experiment
approximate analytic solution
Figure 6. Sand swimming performance dependence on wave par-ameters. Wave efficiency h versus amplitude to wavelength ratioA/l for (a) the numerical sandfish simulation (dashed curveand triangles, f¼ 4 Hz) with a tapered (dark blue) and uniform(cyan) square cross-section body. The pink shaded region corre-sponds to the RFT prediction for square cross-section body formaximum (flat plate, lower bound) and 30% of the maximumhead drag (higher bound), respectively. The black cross corre-sponds to the animal experiments (A/l¼ 0.25+0.07, h¼
0.53+0.16). Grey solid curves correspond to the approximateanalytical RFT solutions, and are divided into regions 1, 2 and3 by dashed black vertical lines (regions correspond to thosemarked in figure 2b,c). The red curve is the RFT prediction of hfor a square cross-section body with maximum head drag withthe net force on each element scaled by 0.5 (see text). Inset: theaverage of the absolute value of c decreases with A/l. (b) h
versus A/l for the robot experiment (green circles) and robotsimulation (blue triangles and dashed curve), f¼ 0.5 Hz. (c) Forafixed lengthundulator, thewavelengthdecreaseswith increasingamplitude. Spatial forms are depicted by orange curves.
Models of undulatory swimming in sand R. D. Maladen et al. 9
in the RFT prediction results in a curve that closelymatches the non-tapered simulation (figure 6a). Wereturn to this point in §7. For all A/l, the simulatedsandfish with tapered body progresses with a higher h
than for the non-tapered sandfish mainly owing to thereduction in head drag. The dependence of h on A/lfrom both robot experiment and simulation (figure 6b)qualitatively matches that predicted by the RFT andnumerical sandfish simulation. As explained in §4.2, thereduced performance of the robot compared with the
J. R. Soc. Interface
RFT and numerical sandfish simulation is due to thesmoother body profile of the animal model (because ofthe larger number of segments) when compared withthe robot.
5.1. Analytical approximate solution for resistiveforce theory
Since the shapes of the h versus A/l curves are similarover a wide range of experimental and model conditions,and since performance limits on sand-swimming aredetermined by the dependence of h on A/l, it is impor-tant to understand how parameters in the model affectthis functional relationship. Therefore, we gain insightinto this function by developing analytical solutions ofthe RFT in three regions: low A/l, where h increaseswith positive curvature, intermediate A/l, where h
increases significantly and high A/l, where h is largelyindependent of A/l.
As equation (3.1) shows, thrust is determined by theorientation u of the element, the maximum value ofwhich increases with A/l, and the magnitude of thenormal force. The increase in the projected area ofthe element perpendicular to the forward motion of theanimal (which increases thrust) explains the increase inh as a function of A/l. Understanding the form of h
versus A/l in the three regions, however, requires exam-ination of the measured force laws (figure 2b,c). Becauseof the non-trivial dependence of the force on c, we dividethe h versus A/l relationship into three adjacent regions(figure 6a) in each of which we approximate the force aseither constant or linearly dependent on c. Below, wegive a summary of the calculations; see electronic sup-plementary material for full details.
The order of the regions in figures 2 and 6 is reversedbecause A/l and c are inversely related (inset, figure 6a).As solving the RFT numerically without head drag doesnot qualitatively affect the dependence of h on A/l, weneglect head drag to simplify the analysis.
Region 1 (small A/l). For small and increasing oscil-lation amplitude (and similarly for A/l and u), hincreases from zero with an increasing rate. In thisregion as c decreases, the displacement of an elementof the body of the animal remains nearly perpendicularto its forward velocity c � p/2 (figure 2b,c) for amajority of the cycle resulting in F? remaining nearlyconstant (at its maximum) while Fk increases.Consequently, the stresses perpendicular and parallelto an element can be approximated as:
P? ¼F?bd¼ C1
S?;
and Pk ¼Fkbd¼ C 1
k ðp=2� cÞ;
9>>=>>; ð5:1Þ
where b and d correspond to the height and length ofthe element dragged through the medium. CS?
1 and Ck1
are fitting parameters for the forces in Region 1 (valuesof the coefficients are given in electronic supplementarymaterial, table S2). To derive an analytical solution inthis region, we examine the numerical solution infigure 6 and find that in this region h � 0, u � 0 andc � p /2. Using these approximations and equation (5.1),
![Page 10: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/10.jpg)
10 Models of undulatory swimming in sand R. D. Maladen et al.
we solve for h in equation (3.5):
h ¼ 2p2 C1S?
C 1k� 1
!Al
� �2
: ð5:2Þ
In this region of small A/l (or small h), as A/lincreases, F?/Fk decreases rapidly, which competeswith increasing sinu and results in the quadratic depen-dence of h on A/l.
Region 2 (intermediate A/l). For 0.05 , A/l ,
0.15, h increases substantially and rapidly. In thisregion as c decreases F? increases slowly and Fk isnearly constant:
P? ¼F?bd¼ C2
S? þ C2?c
and Pk ¼Fkbd¼ C2
Sk;
9>>=>>; ð5:3Þ
where C?2 , CS?
2 and CSk2 are fitting parameters for the
forces in Region 2. Solving for h gives
h ¼C2
Sk � 4C2S?
Al
16C 2?
Al
� �2 þ 1
" #�1
: ð5:4Þ
Physically, since F?/Fk decreases slowly, h in thisregion is more sensitive to variations in sin u, and there-fore for increasing amplitude h increases rapidly andapproximately linearly.
Region 3 (large A/l). For increasing A/l . 0.15, hincreases slowly. Here, as c decreases, F? decreasesrapidly while Fk saturates at its maximum as the sidesof the dragged rod are nearly parallel to its velocityfor a majority of each cycle. This gives
P? ¼F?bd¼ C 3
?c;
and Pk ¼Fkbd¼ C3
Sk þ C 3kc;
9>>=>>; ð5:5Þ
where C?3 , CS?
3 and CSk3 are fitting parameters for the
forces in Region 3. To derive an analytical solution,we assume h � 1, u � p/2 and c � 0 which gives,
h ¼ 1�4C3
Sk
4C3? � C3
k ðA=lÞ�1 : ð5:6Þ
Physically, the decrease in F?/Fk competes with theincrease of sinu which plateaus for large amplitude (asu approaches p/2), which causes h to increase slowly.
Overall, the analytical solution of the RFT correctlypredicts that h increases quadratically for small A/l,increases rapidly for intermediate A/l and is nearlyconstant for large A/l. For each region, the analyticalform of h qualitatively agrees with the calculatedshape of the h versus A/l relationship (figure 6a).The analytic solutions demonstrate that the differencebetween swimming in sand and swimming in a low-ReNewtonian fluid is predominantly because of the differ-ence in the functional forms of F? and Fk in these twomedia (in addition to the difference that in granularmedia, forces are speed independent for low speeds,,40 cm s21 in our study). In low-Re fluids [39], F?
J. R. Soc. Interface
and Fk are proportional to their respective projectedvelocities with coefficients in the ratio of 2 : 1. In con-trast, in granular media, the functional forms of F?and Fk are more complicated and thus the effective coef-ficient ratio depends on A/l. The larger slope of F? atsmaller c (small A/l) is largely responsible for theincreased magnitude of h in granular media relative tothat in low-Re swimmers like nematodes.
6. OPTIMAL SAND-SWIMMING
All our models predict that the animal increases h byincreasing A/l (figure 6a,b), but we find that theanimal does not operate at high A/l. Maladenet al. [22] showed using the RFT model that locomotionat large A/l (figure 6c) comes with a cost: since theanimal is of finite length, the distance it travels percycle decreases with increasing A/l. We can see thisby expressing body lengths travelled per cycle as vx/fL ¼ hl/L, as vx ¼ hfl. While h increases with increas-ing A/l, l decreases and thus a maximum in forwardprogress per cycle can be expected. Figure 7a,b showsthat as predicted by the RFT, both the numerical sand-fish model and the physical and simulated robot modelsdisplay a maximum forward progress per cycle at A/l �0.2. As expected, the simulated sandfish with a taperedbody shape moves faster than the square-tube shapebut the values of A/l that maximize their forwardspeed are close (figure 7a). Similar to the predictionof h versus A/l, the RFT systematically over-predictsthe speed per cycle compared with the numerical simu-lation, but scaling the net force on each segment(effectively the thrust) by 0.5 in the RFT results in anexcellent match between the RFT and numerical simu-lation of the square tube body. The biological datareside close to the peak of the curve, indicating thatthe animal is maximizing its sand-swimming speed.This result agrees with the hypothesis that sandfishburial is an escape response [28].
To test the effect of the number of wave periods onperformance, we fixed A/l ¼ 0.2 and varied 0.3 , j ,
1.6. Testing was possible over only a limited range forthe physical robot because for j , 0.6, the side walls ofthe test container interfere with the motion owing tolarge yawing of the robot and for j . 1.3, the maximumangle required to maintain A/l ¼ 0.2 exceeds the rangeof motion of the servos. The models progress forwardfastest for approximately a single period along thebody (figure 7c,d). The animal, as mentioned, operatesclose to the maximum speed predicted by the models.
We can explain the dependence of speed on j: for non-integer j the sandfish model experiences an unbalancedtorque that results in a periodic yawing motion (with anamplitude of more than 408 for j ¼ 0.5), which causes Ato become effectively smaller and thus results in lowerh. For fixed A/l, as j increases l decreases owing to thefixed body length. For j , 1, as j increases both yawand l decrease which has competing opposite effects onforward velocity and results in a maximum vx at j , 1.For j . 1, as j increases, decreased vx mainly resultsfrom the decrease in l. We use the RFT to predict h
only for a single period ( j ¼ 1) because determining h
![Page 11: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/11.jpg)
0.6(a) (c)
(b) (d)
0
0.3
x = 1
x = 1
0.4
0
0.2
A/l
A/l = 0.2
A/l = 0.22
x0 1 2
spee
d (b
l cyc
le–1
)sp
eed
(bl c
ycle
–1)
0.3 0.6
RFT
animalanimalsimulation
robotsimulation
robot
robotsimulationrobot
animalsimulation
animal
scaled RFT
Figure 7. Kinematics that maximize swimming speed. (a) Forward speed (in bl per cycle) measured while varying the ratio of A tol for a single period wave. The cyan and blue dashed curves with triangles correspond to the sandfish simulation with flat andtapered heads, respectively. A third order polynomial fit to the peak of the tapered head sandfish simulation curve in identifiesthe maximum speed ¼ 0.41+ 0.01 bl cycle21 at A/l ¼ 0.23+ 0.01. The pink shaded region corresponds to the RFT predictionfor square cross-section body for maximum (flat plate, lower bound) and 30% of the maximum (higher bound) head drag, maxi-mum swimming speeds correspond to A/l ¼ 0.19 and A/l ¼ 0.21, respectively. The red curve is the RFT prediction of forwardspeed for a square cross-section body with maximum head drag with the net force on each element scaled by 0.5 (see text). Themaximum forward speed corresponds to A/l ¼ 0.27. (b) Forward speed for the robot in experiment (green circles) and simulation(dashed blue curve with triangles) corresponding to varying A/l (with j ¼ 1). Fitting the peak of the robot simulation curve witha third order polynomial identifies the maximum speed ¼ 0.28+0.01 bl cycle21 at A/l ¼ 0.24+0.01. (c) Forward speedmeasured while varying j in the sandfish model with A/l ¼ 0.22. Spatial forms depicted by orange curves. (d) Forward speedfor the robot in experiment (green circles) and simulation (dashed blue curve with triangles) corresponding to varying j
(with A/l ¼ 0.2). For the numerical sandfish results (a,c) f ¼ 2 Hz and for the robot experiment and simulation results (b,d)f ¼ 0.5 Hz. Black cross (A/l ¼ 0.25+ 0.07, speed ¼ 0.39+0.1 bl cycle21) in (a) and black box ( j ¼ 1) in (c) correspond tomeasurements from animal experiment.
Models of undulatory swimming in sand R. D. Maladen et al. 11
for non-integer j is challenging owing to unbalancedtorques in the plane of motion.
7. DISCUSSION AND CONCLUSION
Motivated by biological experiments of sandfish loco-motion, we developed numerical modelling and roboticapproaches to study undulatory sand-swimming. Weused the models to test the predictions of our previouslydeveloped empirical resistive force model and demon-strated that limbless undulatory locomotion with h
comparable with that of the animal can be achievedwithin granular media by models using the wave kine-matics of the animal. We determined how h depends onamplitude anddevelopedapproximateanalytical solutionsthat give insight into how the interdependent effects ofthrust and drag forces, orientation of body elements andspatial characteristics of the animal influence h. Witheach model, we showed that the competing effects ofwave efficiency and wavelength determine forward speed,
J. R. Soc. Interface
and that A/l � 0.2 and j � 1 maximize forward swim-ming speed. The sandfish uses these optimal kinematicsto swim rapidly within granular media. The performancemeasured in experiment and predicted by each modelobtained by constraining only kinematics (and notforces) was the same as that of the animal across a rangeof media properties like particle size and density.
The RFT over-predicts h for varying A/l but theagreement of the functional form of the relationshipcompared with the non-tapered simulation is good.The cause of these performance differences may lie inthe assumptions of the RFT. First, at larger A/l, theassumption that the forces associated with each elementare localized may be inaccurate. As the amplitudeincreases, the region of particles influenced by theadjacent segments may overlap, which could cause areduction in thrust and thus performance.
Second, the force on the body of the model sandfishis different for the RFT and the numerical simulation.The net force on the body is nearly 50 per cent lower
![Page 12: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/12.jpg)
12 Models of undulatory swimming in sand R. D. Maladen et al.
(for A/l ¼ 0.22) in simulation than estimated by theRFT because a segment decelerates as it reaches itsmaximum lateral excursion (A) and accelerates afterthe velocity direction reverses. This results in a varyingvelocity and a possible hysteresis effect as the lateral dis-placement reverses, which are not considered in the RFT.Hence, the deviation from the constant steady state vel-ocity assumption of the RFT may be responsible for theover-prediction in h when compared with the numericalsimulation for the h versus A/l relation (figure 6a).
Third, an effect of possible importance at higher A/lis that while the centre of mass (CoM) in both animaland numerical simulation oscillate laterally during loco-motion, the RFT assumes that the CoM does notoscillate. Lateral CoM oscillation reduces the effectiveamplitude and changes the effective orientation (c) ofeach element which, according to our force measure-ments, should decrease h. Also yaw motion is notconsidered in the RFT.
Future comparison of the models will elucidate con-tributions from these three mechanisms and thusallow for better understanding of the physics of forcesin granular media. With advances in our understandingof force generation in granular media, the RFT will beimproved, potentially allowing it to accurately predicth for more complicated geometries such as the smoothlytapered body of the sandfish or the more discretizedshape of the robot.
We now discuss the assumption of planar motionused throughout our modelling. Although the sandfishswims into the medium at angles between 208 and 308relative to the horizontal, the RFT assumes that loco-motion occurs in a horizontal plane; comparison withthe numerical simulation and physical robot is madefor the same horizontal orientation. Previous calcu-lations showed that since resistive forces increaselinearly with depth [47,48], the net thrust and drag gen-erated by the body of the animal are unaffected by theentry angle. This suggests that the dominant effect ofan angled swim is an increase in head drag. Based onmeasurements from side view X-ray data of theanimal [22], we estimate that the force per area onthe head is 1.5 times larger than on the centre of thebody. With increased head drag, the RFT predictsthat h at 228 should be approximately 15 per cent smal-ler than that for horizontal swimming. Simulation of asandfish model constrained in a plane at 228 relativeto the horizontal plane shows that swimming speed isapproximately 16 per cent slower than in the horizontalcase. This finding supports our RFT prediction that thedominant effect of swimming at an angle is an increasein head drag. The fact that the h predicted by thenumerical model for the tapered body is higher (swim-ming at a fixed depth) (figure 1e) than that measuredfor the animal (swimming at 228) is consistent withthe increase in head drag for angled dives.
Our complementary modelling techniques have indi-vidual strengths and weaknesses. For example, whileRFT can be rapidly solved to predict organism perform-ance, predictions in different media and with differentpreparation require re-determination of the empiricalforce laws, which is inconvenient. In contrast, althoughthe numerical simulation is slower (several days on a
J. R. Soc. Interface
desktop PC), the experimentally validated simulationcan give an understanding of these force interactionsfrom the particle perspective and can be used to gener-ate empirical drag laws for input into RFT. Thesimulation is also a flexible design tool with which par-ameters like particle–particle friction and animalkinematics can be easily varied to accurately predictperformance. The robot is a key complement to thenumerical and theoretical approaches as it validatespredictions in a real world environment. However,unlike simulations, the robot is not amenable to exten-sive adjustments and cannot be used conveniently tomeasure particle forces and flowfields.
The framework of experimental visualization tech-niques, and theoretical, computational and physicalmodelling approaches that we have described here willallow us to develop and test mechanical hypothesis ofinteraction between the locomotor and its surround-ings [54]. All models allow variation of parametersthat are difficult to vary and control in organisms andcan thus address questions concerning mechanical costof transport, effect of body shape, skin friction,burial/unburial mechanics, manoeuvring, controlmethodologies [55], sensing and sand-swimming per-formance. These tools will also allow investigation ofthe detailed physics that governs the form of the forcelaws within granular media. The models can be usedas design tools to develop the next generation of bio-physically inspired sand-swimming robots that willexplore complex flowing environments.
We thank Mateo Garcia for characterizing the granular media,and Sarah Steinmetz for help with the animal experiments.We thank Andrew Slatton and Daniel Cohen for theirassistance with the numerical sandfish simulation, and wethank Kellar Autumn for helpful discussion. This work wassupported by The Burroughs Wellcome Fund Career Awardat the Scientific Interface, NSF Physics of Living Systemsgrant PHY-0749991, and the Army Research Laboratory(ARL) Micro Autonomous Systems and Technology (MAST)Collaborative Technology Alliance (CTA) under cooperativeagreement number W911NF-08-2-0004.
REFERENCES
1 Drucker, E. & Lauder, G. 1999 Locomotor forces on aswimming fish: three-dimensional vortex wake dynamicsquantified using digital particle image velocimetry.J. Exp. Biol. 202, 2393–2412.
2 Nauen, J. & Lauder, G. 2002 Quantification of the wake ofrainbow trout (Oncorhynchus mykiss) using three-dimen-sional stereoscopic digital particle image velocimetry.J. Exp. Biol. 205, 3271–3279.
3 Hedenstrom, A., Van Griethuijsen, L., Rosen, M. &Spedding, G. 2006 Vortex wakes of birds: recent develop-ments using digital particle image velocimetry in awind tunnel. Anim. Biol. 56, 535–549. (doi:10.1163/157075606778967856)
4 Fontaine, E., Zabala, F., Dickinson, M. & Burdick, J. 2009Wing and body motion during flight initiation inDrosophila revealed by automated visual tracking.J. Exp. Biol. 212, 1307–1323. (doi:10.1242/jeb.025379)
5 Bejan, A. & Marden, J. 2006 Unifying constructal theoryfor scale effects in running, swimming and flying. J. Exp.Biol. 209, 238–248. (doi:10.1242/jeb.01974)
![Page 13: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/13.jpg)
Models of undulatory swimming in sand R. D. Maladen et al. 13
6 Holmes, P., Full, R. J., Koditschek, D. & Guckenheimer, J.2006 The dynamics of legged locomotion: models, ana-lyses, and challenges. SIAM Rev. 48, 207–304. (doi:10.1137/S0036144504445133)
7 Lighthill, M. 1971 Large-amplitude elongated-body theoryof fish locomotion. Proc. R. Soc. Lond. B 179, 125–138.(doi:10.1098/rspb.1971.0085)
8 Mittal, R., Dong, H., Bozkurttas, M., Lauder, G. &Madden, P. 2006 Locomotion with flexible propulsors: II.Computational modeling of pectoral fin swimming insunfish. Bioinspiration Biomimet. 1, S35. (doi:10.1088/1748-3182/1/4/S05)
9 Shimada, T., Kadau, D., Shinbrot, T. & Herrmann, H. 2009Swimming in granular media. Phys. Rev. E 80, 020301.(doi:10.1103/PhysRevE.80.020301)
10 Eldredge, J. 2006 Numerical simulations of undulatoryswimming at moderate Reynolds number. BioinspirationBiomimet. 1, S19–S24. (doi:10.1088/1748-3182/1/4/S03)
11 Crespi, A. & Ijspeert, A. 2008 Online optimization ofswimming and crawling in an amphibious snake robot.IEEE Trans. Robot. 24, 75–87. (doi:10.1109/TRO.2008.915426)
12 Kato, N. & Kamimura, S. 2007 Bio-mechanisms of swim-ming and flying: fluid dynamics, biomimetic robots, andsports science. Berlin, Germany: Springer.
13 Lehmann, F. 2004 Aerial locomotion in flies and robots:kinematic control and aerodynamics of oscillating wings.Arthropod Struct. Dev. 33, 331–345. (doi:10.1016/j.asd.2004.05.003)
14 Ellington, C. 1999 The novel aerodynamics of insectflight: applications to micro-air vehicles. J. Exp. Biol.202, 3439–3448.
15 Dabiri, J. & Gharib, M. 2005 The role of optimal vortexformation in biological fluid transport. Proc. R. Soc. B272, 1557–1560. (doi:10.1098/rspb.2005.3109)
16 Hu, D., Nirody, J., Scott, T. & Shelley, M. 2009 The mech-anics of slithering locomotion. Proc. Natl Acad. Sci. USA106, 10 081–10 085. (doi:10.1073/pnas.081 2533106)
17 Tytell, E., Hsu, C., Williams, T., Cohen, A. & Fauci, L.2010 Interactions between internal forces, body stiffness,and fluid environment in a neuromechanical model oflamprey swimming. Proc. Natl Acad. Sci. USA 107,19 832–19 837. (doi:10.1073/pnas.1011564107)
18 Biewener, A. 1990 Biomechanics of mammalian terrestriallocomotion. Science 250, 1097–1103. (doi:10.1126/science.2251499)
19 Vogel, S. 1996 Life in moving fluids: the physical biology offlow. Princeton, NJ: Princeton University Press.
20 Alexander, R. 2003 Principles of animal locomotion.Princeton, NJ: Princeton University Press.
21 Cohen, N. & Boyle, J. 2009 Swimming at low Reynoldsnumber: a beginners guide to undulatory locomotion.Contemp. Phys. 51, 103–123. (doi:10.1080/00107510903268381)
22 Maladen, R., Ding, Y., Li, C. & Goldman, D. 2009 Undu-latory swimming in sand: subsurface locomotion of thesandfish lizard. Science 325, 314–318. (doi:10.1126/science.1172490)
23 Dorgan, K., Arwade, S. & Jumars, P. 2007 Burrowing inmarine muds by crack propagation: kinematics and forces.J. Exp. Biol. 210, 4198–4212. (doi:10.1242/jeb.010371)
24 Guo, Z. & Mahadevan, L. 2008 Limbless undulatory pro-pulsion on land. Proc. Natl Acad. Sci. USA 105, 3179–3184. (doi:10.1073/pnas.0705442105)
25 Norris, K. & Kavanau, J. 1966 The burrowing of the wes-tern shovel-nosed snake, Chionactis occipitalis Hallowell,and the undersand environment. Copeia 1966, 650–664.(doi:10.2307/1441397)
J. R. Soc. Interface
26 Tritton, D. 1989 Physical fluid dynamics. Oxford, UK:Oxford University Press.
27 Anderson, J. & Wendt, J. 1995 Computational fluiddynamics. New York, NY: McGraw-Hill.
28 Arnold, E. 1995 Identifying the effects of history on adap-tation: origins of different sand-diving techniques inlizards. J. Zool. Lond. 235, 351–388. (doi:10.1111/j.1469-7998.1995.tb01758.x)
29 Gaymer, R. 1971 New method of locomotion in limblessterrestrial vertebrates. Nature 234, 150–151. (doi:10.1038/234150a0)
30 Gasc, J., Jouffroy, F., Renous, S. & Von Blottnitz, F. 2009Morphofunctional study of the digging system of the NamibDesert golden mole (Eremitalpa granti namibensis):cinefluorographical and anatomical analysis. J. Zool. 208,9–35. (doi:10.1111/j.1469-7998.1986.tb04706.x)
31 Mosauer, W. 1932 Adaptive convergence in the sand rep-tiles of the Sahara and of California: a study in structureand behavior. Copeia 2, 72–78. (doi:10.2307/1435888)
32 Russell, A. & Bels, V. 2001 Biomechanics and kinematics oflimb-based locomotion in lizards: review, synthesis and pro-spectus. Comp. Biochem. Physiol., Part A 131, 89–112.
33 Gans, C. 1988 Adaptation and the form-function rela-tion. Integr. Comp. Biol. 28, 681–697. (doi:10.1093/icb/28.2.681)
34 Gans, C. 1975 Tetrapod limblessness: evolution andfunctional corollaries. Integr. Comp. Biol. 15, 455–467.(doi:10.1093/icb/15.2.455)
35 Calcott, B. 2009 Lineage explanations: explaining howbiological mechanisms change. Br. J. Phil. Sci. 60, 51–78. (doi:10.1093/bjps/axn047)
36 Lamb, T. & Bauer, A. 2006 Footprints in the sand:independent reduction of subdigital lamellae in theNamib–Kalahari burrowing geckos. Proc. R. Soc. B273, 855–864. (doi:10.1098/rspb.2005.3390)
37 Bagnold, R. A. 1954 The physics of blown sand and desertdunes. MA, USA: Methuen and Co. Ltd.
38 Li, C., Umbanhowar, P. B., Komsuoglu, H., Koditschek,D. E. & Goldman, D. I. 2009 Sensitive dependence ofthe motion of a legged robot on granular media. Proc.Natl Acad. Sci. USA 106, 3029–3034. (doi:10.1073/pnas.0809095106)
39 Gray, J. & Hancock, G. 1955 The propulsion of sea-urchinspermatozoa. J. Exp. Biol. 32, 802–814.
40 Rapaport, D. 2004 The art of molecular dynamics simu-lation. Cambridge, UK: Cambridge University Press.
41 Nedderman, R. 1992 Statics and kinematics of granularmaterials. Cambridge, UK: Cambridge University Press.
42 Bagnold, R. A. 1954 Experiments on a gravity-free dis-persion of large solid spheres in a Newtonian fluid undershear. Proc. R. Soc. Lond. A 225, 49–63. (doi:10.1098/rspa.1954.0186)
43 McDonald, J. 2008 Handbook of biological statistics.Baltimore, MD: Sparky House.
44 Gray, J. & Lissmann, H. 1964 The locomotion of nema-todes. J. Exp. Biol. 41, 135–154
45 Jayne, B. 1986 Kinematics of terrestrial snake locomotion.Copeia 1986, 915–927. (doi:10.2307/1445288)
46 Gray, J. 1946 The mechanism of locomotion in snakes.J. Exp. Biol. 23, 101–120.
47 Albert, R., Pfeifer, M. A., Barabasi, A. L. & Schiffer, P.1999 Slow drag in a granular medium. Phys. Rev. Lett.82, 205–208. (doi:10.1103/PhysRevLett.82.205)
48 Wieghardt, K. 1975 Experiments in granular flow. Ann.Rev. Fluid Mech. 7, 89–114. (doi:10.1146/annurev.fl.07.010175.000513)
49 Lee, J. & Herrmann, H. 1993 Angle of repose and angle ofmarginal stability: molecular dynamics of granular
![Page 14: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/14.jpg)
14 Models of undulatory swimming in sand R. D. Maladen et al.
particles. J. Phys. A: Math. Gen. 26, 373–383. (doi:10.1088/0305-4470/26/2/021)
50 Ding, Y., Gravish, N. & Goldman, D. I. 2011 Drag inducedlift in granular media. Phys. Rev. Lett. 106, 028001.(doi:10.1103/PhysRevLett.106.028001)
51 Maladen, R., Ding, Y., Umbanhowar, P. & Goldman, D.In press. Undulatory swimming in sand: experimentaland simulation studies of a robotic sandfish.Int. J. Robot. Res.
52 Albert, I., Sample, J., Morss, A., Rajagopalan, S., Barabasi,A. & Schiffer, P. 2001 Granular drag on a discrete object:
J. R. Soc. Interface
shape effects on jamming. Phys. Rev. E 64, 61 303. (doi:10.1103/PhysRevE.64.061303)
53 Dowling, K. 1999 Limbless locomotion: learning to crawl.In Proc. of IEEE Int. Conf. on Robot. Autom., Detroit,1999, vol. 4. IEEE.
54 Nishikawa, K. et al. 2007 Neuromechanics: an integrativeapproach for understanding motor control. Integr. Comp.Biol. 47, 16–54. (doi:10.1093/icb/icm024)
55 Ijspeert, A., Crespi, A. & Cabelguen, J. 2005 Simulationand robotics studies of salamander locomotion. Neuroin-formatics 3, 171–195. (doi:10.1385/NI:3:3:171)
![Page 15: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/15.jpg)
Electronic Supplementary Material:Mechanical models of sandfish locomotion reveal
principles of high performance subsurfacesand-swimming
Ryan D. Maladen1, Yang Ding2, Paul B. Umbanhowar3, Adam Kamor2, andDaniel I. Goldman,2,1∗
1Interdisciplinary Bioengineering Program2School of Physics, Georgia Institute of Technology,
Atlanta, GA 30332, USA3Department of Mechanical Engineering, Northwestern University
Evanston, IL 60208, USA∗E-mail: [email protected]
Analytic approximate solution to the Resistive Force Model(RFT)
In this section we present a more detailed derivation of the approximate analytic forms ofη vs.A/λ shown in figure6 and discussed in§5 in the main paper. References to equations herecorrespond to the equations presented in this document, notin the main text.
We previously developed a Resistive Force Theory for sandfishlocomotion in granular me-dia (1) in which the animal is modeled as a flexible tube with a sinusoidal traveling wave pro-gressing from head to tail (figure 2a) such that the displacement of the animal away from thestraight midline is given by
y = A sin2π
λ(x+ vwt), (1)
wherey is the displacement from the mid-line of a straight animal,A is the amplitude,λ isthe wavelength,f is the wave frequency,vw = fλ is the wave speed,t is the time, andx isthe distance along a line joining the ends of the animal and parallel to the direction of motion.We assume there is no lateral translation (y-direction) nor yaw motion of the entire body soyalso represents the lateral position in the lab frame. For a given forward velocityvx, additional
1
![Page 16: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/16.jpg)
quantities characterizing the motion can be calculated:
vy =dy
dt=
2Aπvw
λcos
2π
λ(x+ vwt) (2)
tan θ =dy
dx=
2Aπ
λcos
2π
λ(x+ vwt) (3)
ψ = tan−1
(
vy
vx
)
− θ, (4)
wherevy is they-component of the velocity,θ is the angle of the axis of an infinitesimal elementwith respect to the forward direction andψ is the angle between the axis of the element and itsinstantaneous velocity. The wave efficiencyη is defined as the ratio of the forward body speedto the traveling wave speed:η = vx/vw.
We assume that the forcesF⊥ andF‖ (see figure 2a for the force diagram, and§3 of thetext for a discussion of the force model) on an infinitesimal element of the animal are functionsof only ψ and are proportional to the area of the longitudinal cross section bds, whereb is theheight of the element andds =
√1 + tan2 θdx is the arc length. By integrating the force over
the body and accounting for the head dragFhx, the resultant average net force in the forwarddirection (+x-direction) is:
Fx =
∫ λ
0
(P⊥ sin θ − P‖ cos θ)√
1 + tan2 θbdx+ Fhx, (5)
whereP⊥ andP‖ are stresses perpendicular and parallel to the axis of each infinitesimal elementandFhx is the cycle averaged head drag. By assuming a constant forward average velocity (netforward force along the body equal to zero), the speed of the organism and thus the waveefficiencyη can be determined numerically.
To better understand the dependence ofη onA/λ (figure 6a), we construct analytic solutionsin three regions: lowA/λ whereη increases with positive curvature, intermediateA/λ whereη increases rapidly, and highA/λ whereη is approximately independent ofA/λ. This analysisrequires examination of the empirically determined drag force on a rod as a function ofψ(figure 2b,c) in the three regions (figure 6a) (see text for details). We neglect the head drag asit does not affect the shape of the curve and simplifies the analysis. We approximateP⊥ andP‖
as piece-wise linear functions ofψ. Approximation techniques are then used to obtain simpleranalytical solutions.
Region 1
In Region1, because the amplitude of undulation (A/λ) is small, θ is much less than unity(from equation (2)). Since the projection of the normal force (thrust) in the forward directionis small compared to the total force, the forward speed and hence the wave efficiency is small.
2
![Page 17: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/17.jpg)
Also ψ is close toπ/2 for most of each cycle. Accordingly we use the approximations θ ≈ 0andψ ≈ π/2.
Starting with the expression forψ given in equation (4) and noting thatvx/vy = tan [π/2 − tan−1(vy/vx)] ≈ π/2 − tan−1(vy/vx) we approximateψ as follows:
ψ = tan−1(vy/vx) − θ
≈ π/2 − vx/vy − θ
≈ π/2 − ηvw
2πAvw
λcos 2π
λ(x+ vwt)
− 2πA
λcos
2π
λ(x+ vwt)
= π/2 − η
I− I, whereI =
2πA
λcos
2π
λ(x+ vwt)
= π/2 − I(
1 +η
I2
)
.
(6)
In Region1 (main text, figure 2b,c), the force per unit cross sectional area is approximatedas
P⊥ =F⊥
bd= C1
S⊥
P‖ =F‖
bd= C1
‖(π/2 − ψ),
(7)
whereb andd are the height and length of the rod, andC1
S⊥ andC1
‖ are region specific (indicatedby the superscript) constants.
The integral of the net forward force from equation (5) becomes
Fx ≈∫ λ
0
[
C1
S⊥I − C1
‖I(
1 +η
I2
)]
bdx
≈[
C1
S⊥I − C1
‖ I
(
1 +η
I2
)]
bλ,
(8)
where we replaceI andI2 in the integral by their average valuesI = 1
λ
∫ λ
0|I|dx = 4A
λand
I2 = 1
λ
∫ λ
0I2dx = 2π2(A
λ)2. Applying the constant velocity conditionFx = 0 allows us to
solve forη:
C1
S⊥Iλ = C1
‖ Iλ
(
1 +η
I2
)
η =
(
C1
S⊥
C1
‖
− 1
)
I2
= 2π2
(
C1
S⊥
C1
‖
− 1
)
(
A
λ
)2
.
(9)
3
![Page 18: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/18.jpg)
Region 2
In this region,η ≈ 0.3 and the magnitude ofθ andψ are neither close to0 nor π/2. Toanalytically solve forη, a first order Taylor expansion of the tangent function is used though itis a relatively poor approximation (indicated with∗).
ψ = tan−1vy
vx
− θ
ψ ≈ vy
vx
− I (∗)
ψ ≈ (η−1 − 1)I.
(10)
In Region 2 (figure 2b,c), the force per unit cross sectional area can be approximated as:
P⊥ =F⊥
bd= C2
S⊥ + C2
⊥ψ
P‖ =F‖
bd= C2
S‖.
(11)
The integral of the net forward force becomes
Fx =
∫ λ
0
(
P⊥ sin θ − P‖ cos θ)
√
1 + tan2 θbdx
≈∫ λ
0
[(
C2
S⊥ + C2
⊥ψ)
| sin θ| − C2
S‖ cos θ]
√
1 + tan2 θbdx
≈∫ λ
0
{[
C2
S⊥ + C2
⊥
(
η−1 − 1)
I]
I − C2
S‖
}
√
1 + tan2 θbdx
≈{[
C2
S⊥
4A
λ+ C2
⊥
(
η−1 − 1) 16A2
λ2
]
− C2
S‖
}
bL,
(12)
where we replaceI in the integral by its average valueI andL =∫ λ
0
√1 + tan2 θdx is the
length of the body. Applying the constant velocity condition Fx = 0 allows us to solve forη:
C2
S⊥
4A
λ+ C2
⊥
(
1
η− 1
)
16A2
λ2= C2
S‖
η =1
C2
S‖−4C2
S⊥A
λ
16C2
⊥(A
λ )2 + 1
.(13)
Region 3
In this regionη ≈ 0.7, and since the amplitude of the undulation (A/λ) is large,θ ≈ π/2 andψ ≈ 0 for most of the cycle (see inset of figure6a in main article). We use the approximationsθ ≈ π/2 andψ ≈ 0.
4
![Page 19: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/19.jpg)
Starting with the expression forθ given in equation (3) and noting thattan(π/2 − θ) ≈ π/2 − θ = 1/ tan θ we approximateθ as follows:
tan θ =2πA
λcos
2π
λ(x+ vwt)
θ ≈ π/2 − 1
I.
(14)
Similarly with the use of the approximation
tan−1vy
vx
≈ π
2− vx
vy
, (15)
we haveψ = tan−1
vy
vx
− θ
ψ ≈(
π
2− vx
vy
)
−(
π
2− 1
I
)
ψ =1 − η
I.
(16)
In Region3 (figure2b,c), the force per unit cross sectional area can be approximated as:
P⊥ =F⊥
bd= C3
⊥ψ
P‖ =F‖
bd= C3
S‖ + C3
‖ψ.
(17)
The integral of the net forward force becomes
Fx =
∫ λ
0
(
P⊥ sin θ − P‖ cos θ)
√
1 + tan2 θbdx
=
∫ λ
0
[
C3
⊥ψ tan θ cos θ −(
C3
S‖ + C3
‖ψ)
cos θ]
√
1 + tan2 θbdx
=
∫ λ
0
{
C3
⊥I−1(1 − η)I cos θ −
[
C3
S‖ + C3
‖
1
I(1 − η)
]
cos θ
}
√
1 + tan2 θbdx
=
∫ λ
0
[
(C3
⊥ − C3
‖I−1)(1 − η) cos θ − C3
S‖ cos θ]
√
1 + tan2 θbdx
≈[
(C3
⊥ − C3
‖ I−1)(1 − η) cos θ − C3
S‖ cos θ]
bL.
(18)
In the last stepI is replaced in the integral by its average valueI . Applying the constant velocityconditionFx = 0 allows us to solve forη:
(C3
⊥ − I−1C3
‖)(1 − η) = C3
S‖
η = 1 −4C3
S‖
4C3
⊥ −(
Aλ
)−1
C3
‖
.(19)
5
![Page 20: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/20.jpg)
The physical interpretation for each region is described inthe paper in§5. Overall, the analyticsolution of the RFT correctly predicts thatη increases quadratically for smallA/λ, increasesrapidly for intermediateA/λ and varies slowly for largeA/λ. For each region, the analyti-cal form of η qualitatively agrees with the predicted shape of theη vs.A/λ relationship, seefigure 6a. For values of the coefficients refer to table S2.
Fitting functions for F⊥ and F‖
The following fitting functions are used to obtain analytical expressions forF⊥ andF‖ as afunction ofψ for the data shown in figures S3,S4 (and in figure 2 in the main text, although inthat figure the fits are not shown):
F⊥ = CS sin β0
F‖ = [CF cosψ + CL(1 − sinψ)],(20)
wheretan β0 = γ sinψ. For the forces on the end caps,ψ is replaced byπ/2 − ψ since thesurfaces of the end caps are perpendicular to the rod axis. See table S3 for the values of thefitting parametersCS, CF , CL andγ.
References
1. Maladen, R., Ding, Y., Li, C. & Goldman, D. 2009 Undulatory Swimming inSand: Subsurface Locomotion of the Sandfish Lizard.Science, 325, 314-318.(doi:10.1126/science.1172490)
2. Goldman, D. & Umbanhowar, P. 2008 Scaling and dynamics of sphere and disk impact intogranular media.Phys. Rev. E, 77, 21308. (doi:10.1103/PhysRevE.77.021308(14))
6
![Page 21: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/21.jpg)
0 30 600
2
4
6
ψ (degree)
FN
FS
V1
V2
rFtotal
ψ
V δ
90
(b)
0 0.20
2
4
6
Time(s)
Forc
e (
N)
0.1
(a)
Figure S1: Validating the granular medium simulation for 3 mm glass spheres using rod dragexperiments. Total force on a cylindrical rod (diameter= 15.8 mm, length= 40 mm) immersedto a depth of7.6 cm in experiment (green) and simulation (blue) in a loosely packed medium.(a) Total force as a function of time in steady state region attwo representative angles:ψ = 0◦
(square) andψ = 90◦ (circle). (b) Average total force vs.ψ, the angle between the velocity andorientation of the rod. Inset shows the experimental setup and forces on two representative con-tacting particles whose interaction forces are given by equation (6) in the main text. Parametersfor the numerical simulation are given in table S1 except forµbp. µbp = 0.15 was used to matchthe friction coefficient between the stainless steel rod andglass particles in this experiment.
7
![Page 22: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/22.jpg)
0 0.05 0.1
0
2
4
Time (s)
Acc
ele
rati
on
(g
)
Simulation
Experiment
2 cm
0 1 2 3
5
10
15
vc (m/s)
ap
ea
k (
g)
0
(a)
(b)
apeak
Figure S2: Validating the numerical simulation for 6 mm plastic spheres using the measuredacceleration of a sphere during impact after free-fall (2). (a) Acceleration vs. time in sim-ulation (blue) and experiment (red) with impact velocity of1.4 m/s for a representative run.Acceleration is given in units ofg, the acceleration due to gravity. (Left inset) Aluminum ballinstrumented with accelerometer resting on6 mm plastic spheres. (Right inset) Ball and parti-cles in simulation. (b) Peak acceleration during impact as afunction of impact velocity fromsimulation (blue) and experiment (red). Parameters for this numerical simulation are given intable S1.
8
![Page 23: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/23.jpg)
0
3
6
9
F (
N)
0 30 60 90ψ (degree)
(b)
2
F (
N)
0
1
(a)
Figure S3: Forces ((a)F‖ and (b)F⊥) on a square cross-section rod (width, height= 16 mm,length= 40 mm) dragged through3 mm glass particles in simulation as a function of the angle,ψ, between the velocity direction and the rod axis. Blue and redmarkers correspond to forcesalong the length of the rod while green and magenta markers correspond to forces at the end capsof the rod. Filled and open circles correspond to loosely andclosely packed media, respectively.Parameters for the simulation are given in table S1. Solid lines denote fits to equation (20) withfit parameters given in table S3.
9
![Page 24: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/24.jpg)
0
0.5
1
0 30 60 900
2
4
ψ (degree)
F (
N)
F (
N)
(a)
(b)
Figure S4: Forces ((a)F‖ and (b)F⊥) on a square cross-section rod (width, height= 16 mm,length= 70 mm) dragged through loosely packed6 mm plastic particles in simulation as afunction of the angle,ψ, between the velocity direction and the rod axis. Blue and redmarkerscorrespond to forces along the length of the rod while green and magenta markers correspondto forces at the end caps of the rod. Parameters for the simulation are given in table S1. Solidlines denote fits to equation (20) with fit parameters given intable S3.
10
![Page 25: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/25.jpg)
Description of supplementary movies
Movie S1 (722 KB): High speed x-ray video (250 fps) of the sandfish swimming within3 mmglass particles. For details see§2 of main text.
Movie S2 (666 KB): Top view of a numerically simulated sandfish that swims like the animalin a validated numerical simulation of3 mm glass particles. Particles above the sandfish modelare rendered transparent. The sandfish model oscillates at2.5 Hz. For details see§4.1 of maintext.
Movie S3 (2.3 MB): Top view of a7-segment sandfish robot swimming within6 mm plasticparticles. The markers on the mast of the robot indicate the location of head and tail segments.The robot is oscillating at0.25 Hz. The video data is collected at100 fps. For details see§4.2of main text.
Movie S4 (2.5 MB): Top view of a numerically simulated7 segment robot that swims like thephysical robot in a validated numerical simulation of6 mm plastic particles. Particles above thesandfish model are rendered transparent. For details see§4.2 of main text.
11
![Page 26: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/26.jpg)
Table S1: Parameters used in simulation and measured from experiments.
6 mm plastic particles:
Experiment SimulationHardness (k) 1.7 × 108 kg s−2 m−1/2 2 × 105 kg s−2 m−1/2
Restitution coefficient 0.96 0.88
Gn 1 × 102 kg m−1/2 s−1 5 kg m−1/2 s−1
µparticle−particle (µpp) 0.073 0.080µbody−particle (µbp) 0.27 0.27
Density 1.03 ± 0.04 g cm−3 1.06 g cm−3
Diameter 5.87± 0.06 mm 5.81 mm (50%) and 5.93 mm (50%)Granular volume 188 PD× 62 PD× 35 PD 188 PD× 62 PD× 24 PD
PD is the average particle diameter of 5.87 mm. For both6 mm plastic and3 mm glass parti-cles (see below) the restitution coefficient was measured for particle-particle collisions with oneparticle glued to a stainless steel plate and with an impact velocity of 0.48 m/s in experimentand simulation.
3 mm glass particles:
Experiment SimulationHardness (k) 5.7 × 109 kg s−2 m−1/2 2 × 106 kg s−2 m−1/2
Restitution coefficient 0.92 ± 0.03 0.88
Gn 15 × 102 kg m−1/2 s−1 15 kg m−1/2 s−1
µparticle−particle 0.10 0.10µparticle−body 0.27 0.27
Density 2.47 g cm−3 2.47 g cm−3
Diameter 3.2± 0.2 mm 3.0 mm (50%) and 3.4 mm (50%)Granular volume 67 PD× 56 PD× 31 PD 109 PD× 43 PD× 32 PD
PD is the average particle diameter of 3.2 mm.
Sandfish:
Experiment SimulationAmplitude/Wavelength 0.25 ± 0.05 0.06 − 0.53Length (snout to tail tip) 12.8 ± 0.3 cm 12 cm
Weight 16.2 ± 4 g 16 gMaximum width 1.63 ± 0.11 cm 1.6 cm
Where error is unspecified for experiment, the value is accurate to the last significant digit.
12
![Page 27: J. R. Soc. Interface Published online Mechanical models of ... · visualization [1–4], theoretical [5–7], computational [8– 10] and robotic [11–14] approaches to generate](https://reader034.pdfslide.us/reader034/viewer/2022050417/5f8d66586d0b5b6924570f8b/html5/thumbnails/27.jpg)
Table S2: Fitting parameters for the linear approximations for the force laws in the analyticalapproximate solutions to the RFT.
Region1 Region2 Region3Cn
⊥ 0 0.36 1.3Cn
S⊥ 0.79 0.3 0Cn
‖ 0.27 0 0.14
CnS‖ 0 0.16 0.074
Units for all values are N/cm2 and ‘n’ denotes the region index.
Table S3: Fitting parameters for the analytical functions approximatingF⊥ andF‖.
CS CF CL γ3mm particles LP length 5.57 2.30 -1.74 1.93
3mm particles LP end cap19.52 1.24 -0.99 0.143mm particles CP length 7.70 2.79 -2.03 1.575
3mm particles CP end cap42.16 1.87 -1.58 0.0886mm particles length 3.21 1.34 -0.82 2.79
6mm particles end cap 0.73 0.30 -0.19 0.52
Units forCS, CF andCL are N and unit forγ is dimensionless.
13
![Talk Soc EUSAI - Baillie.ppt [Lecture seule] · 2 URBI – Universal Robotic Body Interfacen Jean-Christophe Baillie nSOC-EUSAI'05 :: Grenoble, France Devices Every sensor, motor,](https://img.pdfslide.us/doc/110x75/5e416b120697947dee4f4e00/talk-soc-eusai-lecture-seule-2-urbi-a-universal-robotic-body-interfacen-jean-christophe.jpg)