Embed Size (px)
Citation preview

Is Clinton Doomed? An Early Forecast for 1996Author(s): Helmut NorpothSource: PS: Political Science and Politics, Vol. 28, No. 2 (Jun., 1995), pp. 201-207Published by: American Political Science AssociationStable URL: http://www.jstor.org/stable/420346 .
Accessed: 15/06/2014 23:25
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
American Political Science Association is collaborating with JSTOR to digitize, preserve and extend access toPS: Political Science and Politics.
http://www.jstor.org
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Features
Is Clinton Doomed? An Early Forecast for 19961
Helmut Norpoth, State University of New York at Stony Brook
Any astronomer can predict just where every star will be at 11:30 pm tonight; he can make no such prediction about his daughter
(Granger 1989) Forecasting elections may be im- possible, but no more so than re- sisting the temptation to try. As citizens following a campaign, we all indulge in private guesses about who is going to win electoral con- tests. Some go further and engage in illegal acts-unless done through the services of the Iowa Electronic Market-and bet money on election outcomes. Numerous political sci- entists have invited fame, but also ridicule, by designing sophisticated models to forecast elections; read- ers of PS are no strangers to those efforts. Students of elections can hardly escape this tempting oppor- tunity any more than they can es- cape elections themselves. No phe- nomenon in our discipline comes in such a regular, precise, and verifi- able form as an election.
As Republican hopefuls an- nounce bids to run for president in 1996, while Bill Clinton is ponder- ing his strategy for reelection, polit- ical scientists resume their tinker- ing with models to predict the outcome of the 1996 presidential election. Those forecasts, however, will not arrive until two or three months before election day, when the most up-to-date readings for the various predictors are available. Some would argue that such early forecasting is presumptuous any- how, since it ignores the whole general election campaign. Others will complain that those forecasts arrive too late to have more than curiosity value.
This paper proposes a model for forecasting U.S. presidential elec- tions that has two simple, but com-
pelling advantages: it is long-range, permitting a forecast four years ahead of time; and it is cheap, re- quiring no information on variables influencing electoral choices. What is the magic formula that everyone has been looking for? Ruling out the help of astrology, this effort relies on the power of autoregres- sive models. The basic premise is that the outcomes of presidential elections are not independent ran- dom events, like successive coin flips. Instead, they exhibit regulari- ties useful for forecasting. To give away the plot, the forecast of the model developed below is for the Democrats to retain control of the White House next year. No, Bill Clinton is not doomed in 1996.
The Presidential Vote as a Time Series It is not uncommon for forecasters to turn to a phenomenon's past be- havior in search of prospective clues. In the case of elections, one would scan past elections for hints of trends, cycles, or other dynamic regularities. For many countries with either a short history of elec- tions, or a rapidly changing cast of partisan actors, or else frequent changes of electoral rules, that search would not yield reliable hints. In the United States, on the other hand, it is possible to track elections for quite some time with the same cast and much the same set of rules. With the 1860 election, the Republican Party established itself as a competitor of equal standing to the Democratic Party, and these same two political parties have controlled American elections ever since. Third-party challenges occasionally disturb that control, as
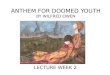
they did most visibly in 1912, 1924, 1968, and most recently, in 1992. But those efforts, which often re- semble movements more than they do political parties, have invariably failed to turn one good electoral showing into a permanent force alongside the established parties. Figure 1 charts the two-party vote division in presidential elections from 1860 to 1992.
What is remarkable about the ups and downs of the vote division is their unremarkable nature. It re- quires no effort of curve fitting to note the absence of a trend. In- stead, the presidential vote appears to be following the path of a sta- tionary series. Stationarity implies equilibrium. A stationary series is one that reverts back to a fixed mean (Granger 1989, 66). Provided the mean level is close to a 50-50 split, the interpretation would be that presidential elections are a highly competitive game.
This notion of presidential elec- tions collides with a widespread view of electoral history, according to which one of the parties enjoys electoral dominance over the other for long periods of time instead of the two being evenly matched. Lu- bell likened the majority party in American politics to a "sun" being orbited by a "moon" representing the minority party (Lubell 1952, chap. 10). Seen this way, the rela- tionship between American parties would be more a case of party he- gemony than of party competition.
Like planetary configurations, the majority-minority alignment between the two parties would not be expected to change often. When change comes it is something akin to a cosmic upheaval called a criti- cal or realigning election (Key
June 1995 201
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Features
FIGURE 1
Republican Percentage of Major-Party Vote for President, 1860-1992
70
65
60-
55
50 CL
45-
40-
35-
30-, 1860 1872 1884 1896 1908 1920 1932 1944 1956 1968 1980 1992
Year
1955; Campbell et al., 1960, 531- 38). The elections of 1860, 1896, and 1932, according to most ob- servers, fit that designation. For the modern era of survey-based electoral analysis, we can deter- mine with great confidence that the Democratic Party has enjoyed a sizeable edge over the Republican Party, dating back to the early 1930s. In the period before that, commencing with the realignment of 1896, it was the Republican Party that is assumed to have held such an edge.
From the point of forecasting, it would not be unwelcome if presi- dential elections were uncompeti- tive for long stretches of time. In- deed, one might be able to predict with considerable confidence the winner of presidential elections during those periods. One way of doing so would be to model the flow of the vote over time as a "random walk." This is a process
that is not constrained by a fixed level, which in the case of perfect competition would be equated with a 50-50 split of the two-party vote. With a random walk model, the best forecast of the next election is simply the same outcome as the last one. Statistically speaking, a random walk has the following ex- pression:
VOTEt = VOTEt-1 + Ut
where Ut is a random variable, whose values are unpredictable. The critical test of a random walk boils down to the hypothesis that VOTEt_, relates to VOTEt with an implied parameter (0) equal to 1; the alternative hypothesis is that 0 is smaller than 1.
Ho: o = 1. HA: 0 < 1.
t = -3.95 p < .01.
Judging by the large negative t-ra- tio, the random-walk hypothesis is unequivocally rejected.2 Instead of a random walk, the presidential vote forms a stationary time series, which reverts to the equilibrium level. To reinforce this conclusion, note that the average Republican share of the two-party vote for president since 1860 comes to 51.6%, with a standard error of 1.2. That is not significantly different from a theoretical 50-50 split.
Some students of electoral his- tory might claim nonetheless that during certain partisan eras one of the major parties typically has a better chance than the other one to win presidential elections. Was that not the case in the era following the 1896 realignment? During the 1896-1928 period, the Republican Party won all but two (1912 and 1916) of the nine presidential elec- tions. Hence, during those years, the rule to forecast victory for the
202 PS: Political Science & Politics
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Is Clinton Doomed? An Early Forecast for 1996
TABLE 1 Lagged Correlations of the Presidential Vote Series, 1860-1992
Lag 1 2 3 4 5 6 7 8 Autocorrelation .33 -.36 -.34 -.15 0.0 .12 .17 .11
(standard error) (.17) (.19) (.21) (.22) (.23) (.23) (.23) (.24) Partial Autocorrelation .33 -.53 .02 -.28 0.0 -.06 .11 .01
(standard error = .17)
(N = 34)
dominant party would have done quite well, at least in retrospect.
But that rule would have per- formed with much less distinction in the period following the 1932 realignment. Democratic candidates won only seven of thirteen elec- tions for president between 1932 and 1980, during which time the Democratic Party enjoyed a certi- fied edge in the partisan attach- ments of the U.S. electorate. Since then, Democrats have won only one presidential election, even though, as some believe, the parti- san alignment in the electorate still favored the Democratic Party. Whatever the long-term partisan balance in the electorate-what V.O. Key called its "standing deci- sion"-the choices of voters at the polls are not putting one particular party in the White House for long.
An Autoregressive Model of the Presidential Vote The rejection of the random-walk model does not prove that the pres- idential vote is utterly unpredict- able, with the outcome of one elec- tion being statistically independent of the next one in the manner of white noise. Like prices and wages in economics, some things are sticky in politics. Even the more variable elements of electoral poli- tics, that is, candidates and issues, have lives that transcend a single four-year term. Almost every White House incumbent seeks elec- tion to another term. All this leads us to expect that the vote division in one election will bear some like- ness to the most immediately pre- ceding one.
Yet the competitive nature of the electoral struggle guarantees that popular support for the winning
party will gravitate back toward a 50-50 division. What is certain is that a reversal of electoral fortunes is lurking in the near future. What is not certain is exactly when such a reversal will occur. This latter uncertainty makes it hazardous to forecast future elections with any deterministic function of time, but those outcomes are not a matter of flipping a coin either.
A promising strategy to deal with a phenomenon so rich in uncer- tainty is by way of autoregressive models (Box and Jenkins 1976; Granger 1989). These models depict the present as a weighted sum of selected past outcomes. To get some clues as to how many past outcomes to include and what weights to attach to them, one ex- amines the patterns of autocorrela- tions and partial autocorrelations. The results presented in Table 1 suggest that the best model for the presidential vote is a second-order autoregressive process. The esti- mates for that model, with standard errors in parentheses, are as fol- lows:3
VOTEt = .52 VOTE1t_ (.15)
- .55 VOTEt-2 + Ut (.15)
Root Mean Square = 5.8
Number of Cases = 34
The positive sign of the parameter for VOTEt_, indicates that a party winning the presidential vote can expect to hold on to much of that vote in the immediately following election. On the other hand, the winning party must reckon with a sharp reversal in the election be- yond that, given the negative sign for VOTEt2. After two terms in office, it appears that the accumula- tion of grievances with the party controlling the White House imperil its continued hold on the electorate.
This is consistent with a tally of presidential win-streaks. Table 2 lists the number of times that a party has won the popular vote in successive presidential elections between 1860 and 1992. The long- est winning streak is five, encom- passing the victories of Franklin Roosevelt and Harry Truman (1932 to 1948).4 But such a long streak occurred only once. The modal win streak is just two elections, with the arithmetic average being 2.5. This suggests that a change of party control in the White House typically occurs after two or three terms. The odds are long for a party to capture the presidency more than three times in a row.
TABLE 2 Partisan Win Streaks in Presidential Elections, 1860-1992
Number of Elections Won in a Row by Same Partya Elections
One 1876, 1880, 1976 Two 1912-16, 1952-56, 1960-64, 1968-72 Three 1884-88-92, 1920-24--28, 1980-84-88 Four 1860-64-68-72, 1896-1900-04-08 Five 1932-36-40-44-48 Six or more None
apopular vote division, not electoral college vote.
June 1995 203
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Features
For the purpose of forecasting, the autoregressive model has the advantage of being able to deliver predictions with a long lead time and without requiring any addi- tional information. The model pre- dicts that the Democrats will win the 1996 presidential election with 52.3% of the major-party vote. Pre- sumably that means Bill Clinton, but it would also hold if another Democrat were to run in his place, for the identity of the party's nomi- nee does not matter for this model.
The forecast of a Democratic vic- tory in 1996 could have been issued as early as the moment when the returns came in on election night, 1992. The model on which it is based takes no account of the job that a president has been doing or of the circumstances accompanying his term. For some observers of elections, that is more a liability than an asset. How presumptuous is it to ignore not only the electoral campaign but also the full term of office preceding the election? With- out a doubt the early and cheap nature of the forecast comes at a price. And that price is a sizeable forecast error, which is 5.8 percent- age points. That is bound to give many potential bettors pause before wagering the family fortune on such forecasts. The autoregressive model of the presidential vote is not for the fainthearted. Risk-averse forecasters had better shun it.
TABLE 3 Autoregressive Forecasts of the Republican Percent of the Major- Party Vote, 1948-1992
Year Forecast Actual Deviation 1948 51.3 47.7 3.6 1952 51.9 55.4 -3.5 1956 56.1 57.7 -1.6 1960 53.4 49.8 3.6 1964 46.7 38.7 8.0 1968 43.3 50.4 -7.0 1972 58.3 61.9 -3.6 1976 58.7 48.9 9.8 1980 43.4 55.4 -12.0 1984 54.7 59.2 -4.5 1988 53.6 53.9 -0.3 1992 48.9 46.5 2.4 Note: Each forecast is based on a sepa- rate estimation of the second-order auto- regressive model, using only data on pre- vious elections.
To help the reader evaluate the forecasting performance of the auto- regressive model, Table 3 lists the forecasts for the range of elections typically covered by such ventures, beginning with 1948. Note that each of those forecasts is based on a separate estimation of the model using only elections prior to that point. The forecasting model for 1948, for example, only takes ac- count of elections in the 1860-1944 period. It is reassuring to report that in each of the estimations the two autoregressive parameters have the proper sign, prove statistically significant, and stay within a nar- row range between .5 and .7. These are tributes to a robust model.
But with a forecast error near six percentage points, the model is bound to get it wrong a few times. The worst miss is certainly the 1980 election when the forecast would have been a decisive Repub- lican loss. Jimmy Carter's defeat that year defies the logic of the model. A party wresting control of the White House from the other party is not supposed to lose it af- ter one term. Carter was the first president in 100 years to do so. As most would agree, it required more than the usual punch of bad news, in world affairs and economics, to knock out his presidency.
In contrast, the model closely forecasts George Bush's defeat in 1992. However invincible he ap- peared at the half-way point of his term, the model shows that his re- election in 1992 was clouded. When a party has been occupying the White House for more than two terms, the odds are not favorable for another win.
Comparison with Other Forecasting Models
Election forecasters have typi- cally employed two other ap- proaches than the one touted in this article. They have good rea- sons for their choices, and I cannot quibble with much of their reason- ing. But these more common ap- proaches also have drawbacks and are by no means foolproof.
Trial Heats. For the most part, the business of election forecasting
relies on the expertise of pollsters. Even a textbook on forecasting concedes without discussion that if one wants to "predict the outcome of an election, one conducts a poll of electors" (Granger 1989, 8). One simply asks a variant of the ques- tion: "If the election were held to- day, would you vote for Bill Clinton, George Bush, etc."
Polling voters with an eye on forecasting the outcome has a long, though not invariably noble, pedi- gree. The curiosity of newspapers gave birth to perhaps the first such poll, by the Harrisburg Pennsylva- nian during the election of 1824 (Roll and Cantril 1980, 7). The Lit- erary Digest, in 1936, became shorthand for the folly of using "straw polls" to make forecasts. The same year also marks the time that George Gallup issued his first pre-election poll ("trial heat") in a national election. Yet the euphoria of having unearthed the forecast- er's stone quickly dissipated with Gallup's notorious miss in 1948. The mishap called attention to the fact that drawing a good sample and getting a good response from the sample are no guarantee of good forecasting.5
Aside from the problem of pre- dicting a voter's candidate choice, opinion polls face an even more vexing one in predicting whether or not a respondent is going to the polls on election day. Pollsters have devised intricate schemes to predict which respondents in their samples will be going to the polls and which ones will not. The Gal- lup organization, for example, uses a battery of seven items, ranging from questions about voting in past elections to a respondent's stated intention to vote in the current election, to identify likely voters (Gallup Poll Monthly 1992, 3).
But none of those methods is immune to error. In 1980, most polls predicted-erroneously, as it turned out-a close race between Jimmy Carter and Ronald Reagan up until election day. Mispredic- tions of turnout bore a good deal of responsibility for that miss: Carter supporters did not turn out as heavily as had been estimated (Ka- gay 1992, 104).
All in all, the Gallup Organiza-
204 PS: Political Science & Politics
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Is Clinton Doomed? An Early Forecast for 1996
IOWA / jp
Df- Fd r r
.,M Wrt?4? 1( W,%JA? r*#
C Associated Features, Inc.
tion has a respectable record in picking the winner of the 15 elec- tions between 1936 and 1992. Only twice (the notorious election of 1948 and, then, in 1976) did the or- ganization miss. The final survey in each election year, according to Gallup's own report, deviated from the actual result by an average of 2.75 percentage points (Gallup Poll Monthly Nov. 1992). Of all the many other surveys Gallup con- ducted during an election year, the final survey is certainly the one that would give Gallup the best chance to do well in the accuracy chart. If one is making forecasts by asking voters themselves, it is hard to think how one could do better than asking them the day before the election.6
But that, of course, is a short lead time. Campbell and Wink (1990) compared the accuracy of Gallup surveys conducted at vari- ous times in the election year. For surveys taken in June, the average error is 8 points; for late-July sur-
veys it is 6 points. In other words, the autoregressive model above does no worse than polling voters three months before election day. It is only in early September that the survey error falls sharply below that level, to 4 points, inching be- low three percentage points only in the final survey in November.
What is more, studies of elec- toral behavior have long pointed out that perhaps a voter's own stated vote intention is not the best guide to his or her future voting decision. The American Voter pre- sents a model of individual vote choice with an astonishing record: "the number of our respondents whose votes we are able to foretell from what we know about their partisan attitude is greater than the number who were able to foretell their own votes" (Campbell et al. 1960, 74; also Kelley and Mirer 1974). Unfortunately this model is not practicable for ex-ante forecast- ing, since the "partisan attitude" is gauged in a way that requires infor-
mation on how voters had voted on election day.
Leading Indicators. In contrast to the polling business, academic stu- dents of elections have proposed structural models of voting with "leading indicators" available be- fore election day. Lewis-Beck and Rice (1992) review this forecasting strategy and propose a series of models of their own (also see Camp- bell and Mann 1992). Among the "leading indicators" of the presi- dential vote, the approval rating of the incumbent president occupies the most prominent spot.
Aside from the incumbent's ap- proval rating, "economics looms large as a determinant" in electoral forecasting models, as Lewis-Beck and Rice (1992, 92) note. Few would quibble with the rule that good economic times help an in- cumbent party get reelected and that bad times spell defeat. Studies of individual vote decisions bear out numerous traces of economic effects (e.g., Kiewiet 1983; Lewis-
June 1995 205
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

Features
Beck 1988). And so do aggregate studies of election outcomes (Kramer 1971; Tufte 1978). Most election forecasters have seized on this evidence and built the econ- omy into their models.
There is no question that models using such predictors as presiden- tial approval and economic mea- sures have smaller forecast errors than does the autoregressive model, ranging from under two per- centage points to just over five points (Lewis-Beck and Rice 1992, 95). And that is how it should be. Short-term forces decide elections. Identifying them properly should pay forecasting dividends.
Yet, whatever the statistical fit, the specifications of these models raises some questions. What ex- planatory value, for example, does the economic variable buy beyond that already purchased by presiden- tial approval? If there is one tower- ing explanation for this approval, it is certainly the economy (Hibbs 1982; Norpoth 1984; Ostrom and Simon 1985). How else is the econ- omy going to influence the election than through the evaluation of the incumbent president held responsi- ble for delivering good times?
While overspecifying the incum- bent's role, structural models of elections rarely pay attention to the challenger. It is as if a presidential election were a one-man race. Models trying to rectify this short- coming either rely on trial heats (Campbell and Wink 1990), or draw on summary candidate evaluations provided by the National Election Studies (Erikson 1989; Tufte 1978). For explanatory purposes, the NES candidate evaluations are quite suitable, but they are not available before election day to be useful for forecasting.
In the end, the demand for a properly specified vote model is frustrated by the scarce supply of elections usable for parameter esti- mation. Most predictor variables of interest can be tracked back no fur- ther than the late 1930s. Some have tried to solve this problem by mak- ing each of the 50 states the unit of analysis rather than the nation (e.g., Rosenstone 1983). After all, it is the votes of each state's electors, not the national electorate, that
chooses the president every four years.
However, the multiplication of cases resulting from using 50 state electorates pays only a limited divi- dend. The focus on the states al- lows one to capture home state ad- vantages for presidential and vice presidential candidates, and to take advantage of a state's partisan his- tory. But the key predictor vari- ables, be they social or racial is- sues, management of war, incumbency, or trial-heats all per- tain to the national electorate. Those variables are actually con- stants across all states in a given election. They only vary from elec- tion to election, not across states within a given election. Most vari- ables of interest are simply not available for all the states.
Conclusions The forecasting model introduced
in this article makes the prediction that Bill Clinton will win the 1996 presidential election (assuming he is the Democratic nominee). A year and a half before election day, such a forecast may sound more like an exercise in astrology than in astron- omy. Granted the forecast error is substantial, ruling out by no means a reasonable probability that the Democrats may lose the presidency in 1996. The Clinton forecast none- theless is not of the tea-leaves vari- ety, but comes from a stochastic model of the presidential vote over time. In a nutshell, a party captur- ing the White House from the other party is highly likely to retain con- trol after one term, while facing the prospect of losing the White House after two terms. That is how the law of party competition has worked in presidential election for nearly a century and a half. Seen from this perspective, it was George Bush who was doomed, however invincible he looked barely a year before the 1992 elec- tion. Whatever short-term circum- stances may benefit Clinton's bid for reelection, history is on his side in 1996. But then, that was true for a president by the name of Jimmy Carter, too.
Notes 1. This article incorporates material from
a paper presented at the conference, "Fu- ture Days: Forecasting Elections," July 18- 22, 1994, Alicante, Spain. A note of thanks goes to Antonio Alaminos and Maria Jose Gonzales.
2. This is based on the Dickey-Fuller test of unit roots. The estimated value for the VOTEtI parameter turns out to be .33, which is a far cry from 1.0, even with a standard error of .17. See Dickey, Bell and Miller (1986). The rejection of the random- walk hypothesis confirms the result of a dif- ferent test by Stokes and Iversen (1966).
3. No constant is estimated for the model since the vote series had its mean sub- tracted. For a parameter estimate to be sig- nificant at the .05 level (two-tailed test) with 32 degrees of freedom, the t-ratio has to be at least 2.0. The model easily passes the Ljung-Box test of white-noise (3.3 based on the first eight autocorrelations). Hence, no further stochastic parameters need to be specified in the model.
4. This does not count the Republican victories in 1876 and 1888, which were achieved in the electoral college, not in the popular tally.
5. Sampling problems, however, still dog election polling to this day. The worst case of that kind in recent time occurred in Brit- ain during the general election of 1992. See the discussion in Jowell et al. (1993).
6. Exit polls would do even better, but they constitute more an early report of the actual behavior than a forecast of that be- havior. On exit polls, see Mitofsky (1991).
References Box, George E.P., and Gwilym Jenkins.
1976. Time Series Analysis, Rev. ed. San Francisco: Holden-Day.
Campbell, Angus, Philip E. Converse, War- ren E. Miller, and Donald E. Stokes. 1960. The American Voter. New York: John Wiley and Sons.
Campbell, James E. and Thomas Mann. 1992. "Forecasting the 1992 Presidential Election: A User's Guide to the Mod- els." The Brookings Review 10:22-27.
Campbell, James E. and Kenneth A. Wink. 1990. "Trial-Heat Forecasts of the Presi- dential Vote." American Politics Quar- terly 18:251-69.
Dickey, David A., William R. Bell and Rob- ert B. Miller. 1986. "Unit Roots in Time Series Models: Tests and Implications." The American Statistician 40:12-27.
Erikson, Robert S. 1989. "Economic Condi- tions and the Presidential Vote." Ameri- can Political Science Review 83:567-573.
Gallup Poll Monthly, Nov. 1992. Granger, C.W.J. 1989. Forecasting in Busi-
ness and Economics. Boston: Academic Press.
Hibbs, Douglas A., Jr. "On the Demand for Economic Outcomes: Macroeconomic Performance and Mass Political Support
206 PS: Political Science & Politics
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions

in the United States, Great Britain, and Germany." Journal of Politics 44:426-462.
Jowell, Roger, et al. 1993. "The 1992 British Election: The Failure of the Polls." Pub- lic Opinion Quarterly 57:238-263.
Kagay, Michael R. 1992. "Variability with- out Fault: Why Even Well-Designed Polls Can Disagree." In Media Polls in American Politics, ed. Thomas E. Mann and Gary R. Orren. Washington: Brook- ings, 95-124.
Kelley, Stanley Jr., and Thad W. Mirer. 1974. "The Simple Act of Voting." American Political Science Review 68: 572-591.
Kiewiet, D. Roderick. 1983. Macroeconom- ics & Micropolitics. Chicago: The Uni- versity of Chicago Press.
Kramer, Gerald H. 1971. "Sort-Term Fluc- tuations in U.S. Voting Behavior, 1896- 1964." American Political Science Re- view 65:131-143.
Key, V.O., Jr. 1955. "A Theory of Critical Elections." Journal of Politics 17:3-18.
Lewis-Beck, Michael S. 1988. Economics &
Elections. Ann Arbor: The University of Michigan Press.
Lewis-Beck, Michael S. and Tom Rice. 1992. Forecasting Elections. Washington, DC: Congressional Quarterly.
Lubell, Samuel. 1952. The Future of Ameri- can Politics. New York: Harper & Brothers.
Mitofsky, Warren. 1991. "A Short History of Exit Polls." In Polling and Presiden- tial Election Coverage, ed. Paul J. Lavrakas and Jack K. Holley. Newbury Park: Sage, 83-99.
Norpoth, Helmut. 1984. "Economics, Poli- tics, and the Cycle of Presidential Popu- larity." Political Behavior 6:253-273.
Ostrom, Charles W., Jr. and Dennis M. Si- mon. 1985. "Promise and Performance: A Dynamic Model of Presidential Popu- larity." American Political Science Re- view 79:334-358.
Roll, Charles W. and Albert H. Cantril. 1980. Polls: Their Use and Misuse in Politics. Cabin John, Md: Seven Locks Press.
Rosenstone, Steven J. 1983. Forecasting
Presidential Elections. New Haven: Yale University Press.
Stokes, Donald E. and Gudmund R. Iversen. 1966. "On the Existence of Forces Restoring Party Competition." In Elections and the Political Order, ed. Angus Campbell et al. New York: Wiley, 180-193.
Tufte, Edward R. 1978. Political Control of the Economy. Princeton: Princeton Uni- versity Press.
About the Author Helmut Norpoth is professor of political sci- ence at the State University of New York, Stony Brook. He is author of Confidence Regained: Economics, Mrs. Thatcher, and the British Voter (1992) and coeditor of Eco- nomics and Politics: The Calculus of Sup- port (1991).
Pork Barrel Spending--On the Wane?*
Pork Barrel Spending-On the Wane?*
Gary J. Andres, Dutko and Associates. Inc.
Is pork barrelI spending on the wane? Many think it is, including reformers inside and outside of Congress. Citing the recent decline of earmarks in House appropria- tions bills for projects in members' districts, reformers suggest that a new era of congressional spending practices is dawning.
This article argues instead that the rise in number of earmarks in the last decade as well as the re- cent decline depends on whether Congress and the executive branch are controlled by the same or dif- ferent parties. It further predicts that the Republican takeover of the House and Senate after the 1994 congressional elections could lead to a resurgence of earmarking, in a different form, as long as the Dem- ocrats control the White House.
Among scholars, pork barrel spending analysis represents a ven- erable specialty in the profession, generating some of the most engag- ing debates and finest research in recent years. This literature ana- lyzes how members of Congress create institutions and use legisla- tive rules to enhance their electoral
goals. While not mutually exclu- sive, the two dominant approaches in recent years are the "distribu- tive" and "informational" models of congressional policy making. (For a good review of the last two decades of scholarly research on the subject, see Krehbiel 1991).
Reformers in the 103rd Congress were emboldened by the success of groups such as the "pork busters," an informal group led by Represen- tative Harris Fawell (R-IL), who routinely offered amendments to cut pork and unnecessary directed spending in appropriations bills. Also, some chairs of House autho- rizing committees like George Brown (D-CA), chairman of the Science, Space and Technology Committee, declared an all-out as- sault on directed spending in appro- priations bills. Brown's efforts were aimed at directed spending not pre- viously "authorized" by his com- mittee. Even the Omnibus Crime bill of 1994 was initially defeated in the House on a procedural vote because opponents claimed it in- cluded too much pork.
Other examples of progress in
the war on pork are recent press accounts and studies citing a de- cline in the 103rd Congress in the number of congressional earmarks in appropriations bills. The Wash- ington Post reported at the end of the first session of the 103rd Con- gress that "earmarking, the con- gressional practice of adding foot- notes to spending bills to fund pet projects without public review, is half of what it was two years ago in four major appropriations bills." In the belief that public scrutiny will end the practice of earmarking, spending-reform advocates in the Congress, like Representatives Brown and Fawell, try to force pork out of the back rooms and into the public domain through hearings and other public relations initiatives. "Earmarks are like mushrooms," Brown told the Washington Post. "They grow best in the dark."
Patterns of Earmarks During the Past Decade
As Table 1 indicates, earmarks for academic grants grew from a
June 1995 207
This content downloaded from 195.34.79.101 on Sun, 15 Jun 2014 23:25:28 PMAll use subject to JSTOR Terms and Conditions