Embed Size (px)
Citation preview
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 1/26
15913074 Page 1
Student number 15913074
Rebecca Rollins
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 2/26
15913074 P 2
Contents Page
Page 3 ± Summary
Page 4 ± Introduction
Page 5 ± No damping or dr iving force
Page 9 ± Accuracy of numer ical solutions
Page 10 ± Damping, no dr iving force
Page 16 ± Dr iving force, no damping
Page 18 ± Damped, dr iven oscillator
Page 19 ± Chaos
Page 20 ± Poincare maps
Page 23 - Extensions
Page 24 ± Conclusion
Page 25 ± Acknowledgements
Page 26 - Appendices
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 3/26
15913074 P 3
Summary
The equation of motion, shown below, for a damped, dr iven oscillator was studied.
Where b is the damping coeff icient, is the amplitude of the dr iving force and is thefrequency of the dr iving force.
A computer code was created to solve and plot the solutions for the different types of motion
within the system. In the case of the simple harmonic oscillator and the damped, dr iven
oscillator phase diagrams were also created, as were Poincare maps for the damped, dr iven
oscillator.
The system was investigated when there was neither damping nor dr iving force, resulting in
the system exper iencing simple harmonic motion with natural frequency=1.
Damping, but no dr iving force was applied to the system. While using the approximation of
, an analytic solution was found to give an idea of the value of the damping
coeff icient, b, that should be applied. When , they system exper ienced underdamping,
when b = 2, cr itical damping occurred, and when the system exper ienced
overdamping.
When only a dr iving force was applied, the system exhi bited behaviour of resonance when
the natural frequency of the system, which is equal to 1, was the same as the frequency of
the dr iving force, .
When both damping and dr iving force were applied, it was found that when b = 0.5 and
=2/3, changing the amplitude of the dr iving force slightly, from
to
caused the system to be per iodic and then chaotic. Phase diagrams and Poincare maps
illustrated these f indings.

8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 4/26
15913074 P 4
Introduction
Whether it is a grandfather clock behaving with simple harmonic motion, or a damped system
providing shock absorbers for cars, the types of motion a par ticular system exhi bits can be
extremely interesting and relevant to real life.
For example, the equation for a damped, dr iven oscillator is given by equation 1 below;
Equation 1
Where b is the damping coeff icient, is the amplitude of the dr iving force and is the
frequency of the dr iving force.
The solutions of this equation does have some surpr ising proper ties for cer tain values of , b
and . The questions are, what types of motion are possi ble for this system, and what values
of the parameters yield the most interesting proper ties in each type of motion?
In order to descr i be the different types of motion possi ble for this system, it was decided that
the best approach would be to investigate the system subject to var ious conditions, i.e. when
there is no damping or dr iving force, or when there is either damping or a dr iving force
present, and then consider the motion of the system when it is subject to both of these factors.
The non-linear differential equation, which applies when the oscillations may be of large
amplitude, cannot be solved analytically, although it can be solved numer ically. Therefore in
the initial stages, at least, of the investigation it was deemed reasonable to use x as an
approximation to
for small oscillations,
which allowed analytical solutions
to be determined if needed.
While, for large oscillations the non-linear systems cannot be solved analytically they can be
solved numer ically. As a result a computer program was wr itten in Matlab to solve these
equations and plot the solutions, in order to investigate a par ticular system. In par ticular the
ODE solver, ODE 45 was used which is a single step method based on the 4th
and 5th
order
explicit R unge-Kutta. The computer code used, which allows different values of a, b and ,
and also the initial conditions, to be inputted will be available in appendix 1.

8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 5/26
15913074 P 5
No damping or driving force
Small oscillations
The most well known, and simplest, type of motion for this system occurs when both
damping and dr iving force are absent. This results in the following equation of motion;
Equation 2
This par ticular equation descr i bes simple harmonic motion, which is motion that behaves in
a per iodic fashion, repeating itself in a sinusoidal manner with constant amplitude. (The
natural frequency of the system is=1.)
This equation is known to have the following solution;
Equation 3
Equation 4 = Where A, B and C are constants, is the angular frequency, in this case =1, is the
amplitude, (+) is the phase at time t and is the initial phase. The amplitude and phase
are determined by the initial conditions of the system i.e. position and velocity.
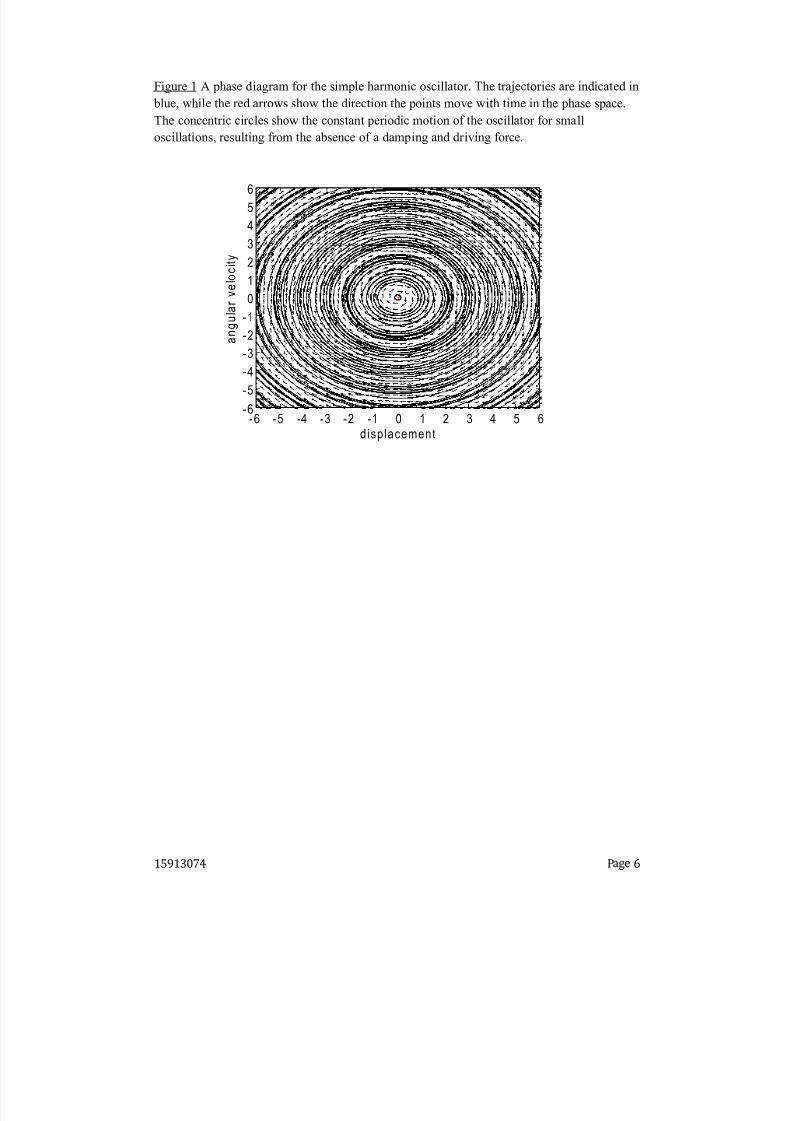
In order to better see how the system behaved when oscillations were small, a phase diagram
was produced. A computer code was obtained, [1], in order to produce all the var ious phasediagrams, including Figure 1 shown below.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 6/26
15913074 P 6
Figure 1 A phase diagram for the simple harmonic oscillator. The trajector ies are indicated in
blue, while the red arrows show the direction the points move with time in the phase space.
The concentr ic circles show the constant per iodic motion of the oscillator for small
oscillations, resulting from the absence of a damping and dr iving force.
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
displacement
a n g u l a r v e l o c i t y

8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 7/26
15913074 P 7
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6-6-5
-4
-3
-2
-1
0
1
2
3
45
6
displacement
a n g u l a r
e l o c i t y
Large Oscillations
Having studied the system with small oscillations, i.e. , a natural progression was to
study what effect using large oscillations in the system would produce. In this case the
equation of motion studied is given by;
Equation 5
As stated previously, the numer ical solution to this equation was obtained from the computer
code and plotted. Many graphs were produced, using var ious initial conditions. However,
ultimately a phase diagram was used. This allowed for a clearer picture of the behaviour of
the system to be seen, and more impor tantly, a compar ison could be made with Figure 1 to
show what effects there would be for large oscillations.
The phase diagram for large oscillations is shown below in f igure 2;
Figure 2 A phase diagram for large oscillations when a damping and dr iving force are absent.
The trajector ies are indicated in blue, while the red arrows show the direction the points move
with time in the phase space. Several stationary points can be seen on the phase diagram.
Saddle points can be seen at , n. Elli ptical f ixed points can be seen at , n
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 8/26
15913074 P 8
A saddle point, also known as a hyperbolic f ixed point, is a point in the domain of
a function which is a stationary point but not a local extremum. In terms of contour lines, a
saddle point can be recognized, in general, by a contour that appears to intersect itself [2]. A
saddle point has eigenvalues, .
In this case, the eigenvalues are
.
An elliptical fixed point of a differential equation is a f ixed point for which the Jacobian has
purely imaginary eigenvalues, [3]
In this case, the eigenvalues are .These eigenvalues were determined by using the Jacobian given by equation 6, [4];
Equation 6
Given a set of n equations in n var iables,
, the Jacobian matr ix is def ined
as;
This equation was adapted to f ind the eigenvalues for equation 5, resulting in the
identif ication of the saddle and elli ptical f ixed points. The full method used for this equation
can be found in appendix 2.
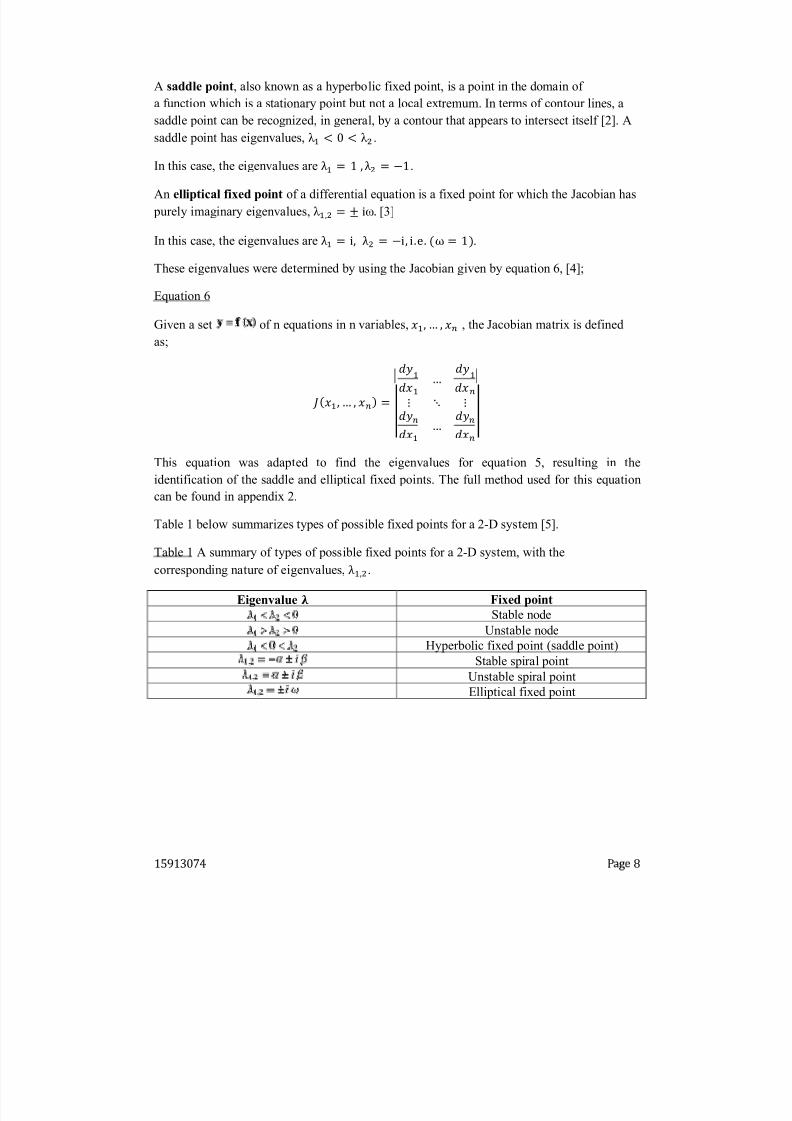
Table 1 below summar izes types of possi ble f ixed points for a 2-D system [5].
Table 1 A summary of types of possi ble f ixed points for a 2-D system, with the
corresponding nature of eigenvalues, .Eigenvalue Fixed point
Stable node
Unstable node
Hyperbolic f ixed point (saddle point)
Stable spiral point
Unstable spiral point
Elli ptical f ixed point
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 9/26
15913074 P 9
0 5 1 0 1 5 2 0 2 5 30 3 5 4 0 4 5 50-0. 01
-0. 008
-0. 006
-0. 004
-0. 002
0
0 . 0 0 2
0 . 0 0 4
0 . 0 0 6
0 . 0 0 8
0. 01
Ti ¡ ¢
D i
£
¤
l¥
¦
§
¨
§
©
A
h
h wi
h ¢
l i
l
!
" ¡ ¢ i
l
l " i
f h ¢
i ¡ l ¢ h ¡
i
il l
l
i
" ¡ ¢
i
l
Accuracy of numerical solution
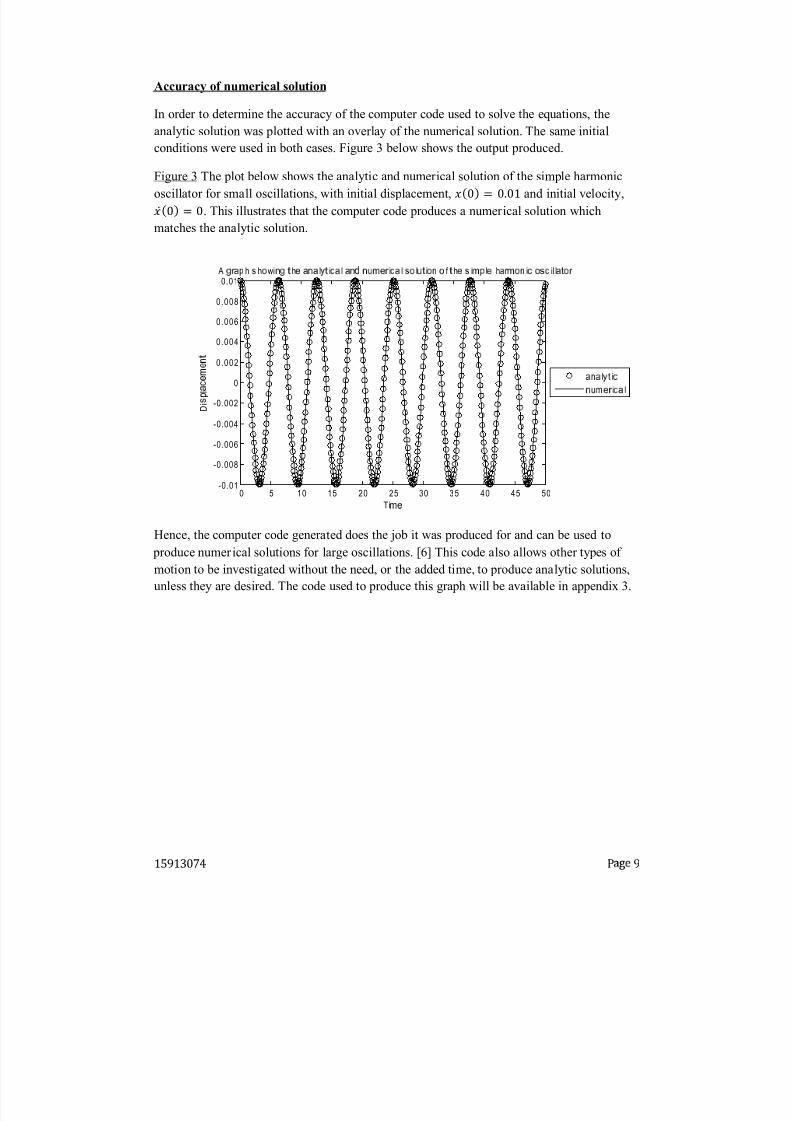
In order to determine the accuracy of the computer code used to solve the equations, the
analytic solution was plotted with an over lay of the numer ical solution. The same initial
conditions were used in both cases. Figure 3 below shows the out put produced.
Figure 3 The plot below shows the analytic and numer ical solution of the simple harmonicoscillator for small oscillations, with initial displacement, and initial velocity, . This illustrates that the computer code produces a numer ical solution which
matches the analytic solution.
Hence, the computer code generated does the job it was produced for and can be used to
produce numer ical solutions for large oscillations. [6] This code also allows other types of
motion to be investigated without the need, or the added time, to produce analytic solutions,
unless they are desired. The code used to produce this graph will be available in appendix 3.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 10/26
15913074 P 10
Damping, no driving force
In any real life situation an oscillator will be subject to the effects of damping, most
commonly fr iction or air resistance. Under this damping force it is to be expected that free
oscillations will decrease with time i.e. the amplitude of the oscillations will gradually be
reduced as energy in the system is slowly dissi pating. The question remains, what value of b
will allow the system to return to its equili br ium position in the quickest time?
The equation of the system that was studied is given by equation 7 below;
Equation 7
The computer program was used to produce var ious out puts for different values of b for both
small and large oscillations. With the same approximate results, it was decided that the
equation of motion for small oscillations would be solved analytically to give an indication of
the values of b that would produce the most interesting results.
For small oscillations equation 7 becomes equation 8, as shown below;
Equation 8
Where b is the damping coeff icient.
Initially the computer program was used to solve equation 8 and plot the solution using
var ious values of b, ranging from b=0.5 to b=0.025. The graphs showed that, as expected, as
the dampening increased the time taken for the system to return to equili br ium decreased,until b=0 and the system once again exhi bits simple harmonic motion.
It was also shown that unlike in strongly damped systems, the oscillations continue to persist
in weak ly damped system.
Figure 4 (a), (b) and (c) below highlight some of the results found.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 11/26
15913074 P 11
0 20 40 60 80 100 120 140 160 180 200-6
-4
-2
0
2
4
6
8
10
12
14x 10
-3
0 20 40 60 80 100 120 140 160 180 200-0.015
-0.01
-0.005
0
0.005
0.01
0.015
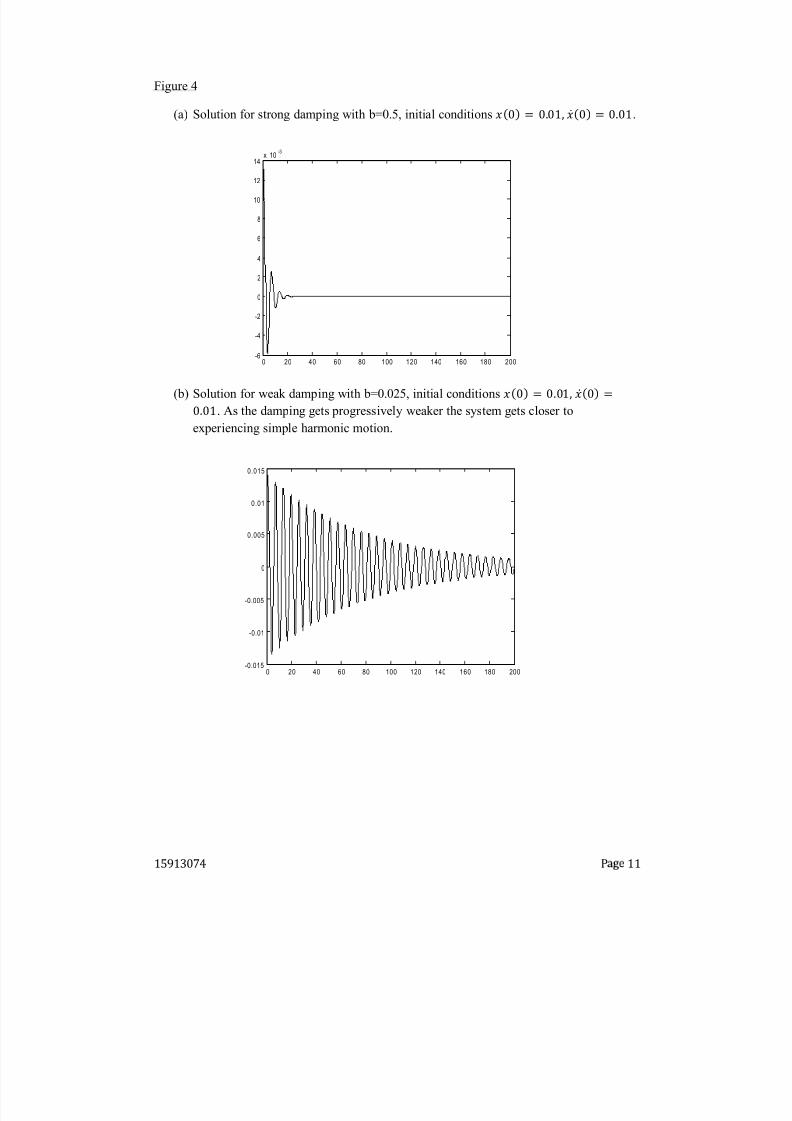
Figure 4
(a) Solution for strong damping with b=0.5, initial conditions .
(b) Solution for weak damping with b=0.025, initial conditions . As the damping gets progressively weaker the system gets closer to
exper iencing simple harmonic motion.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 12/26
15913074 P 12
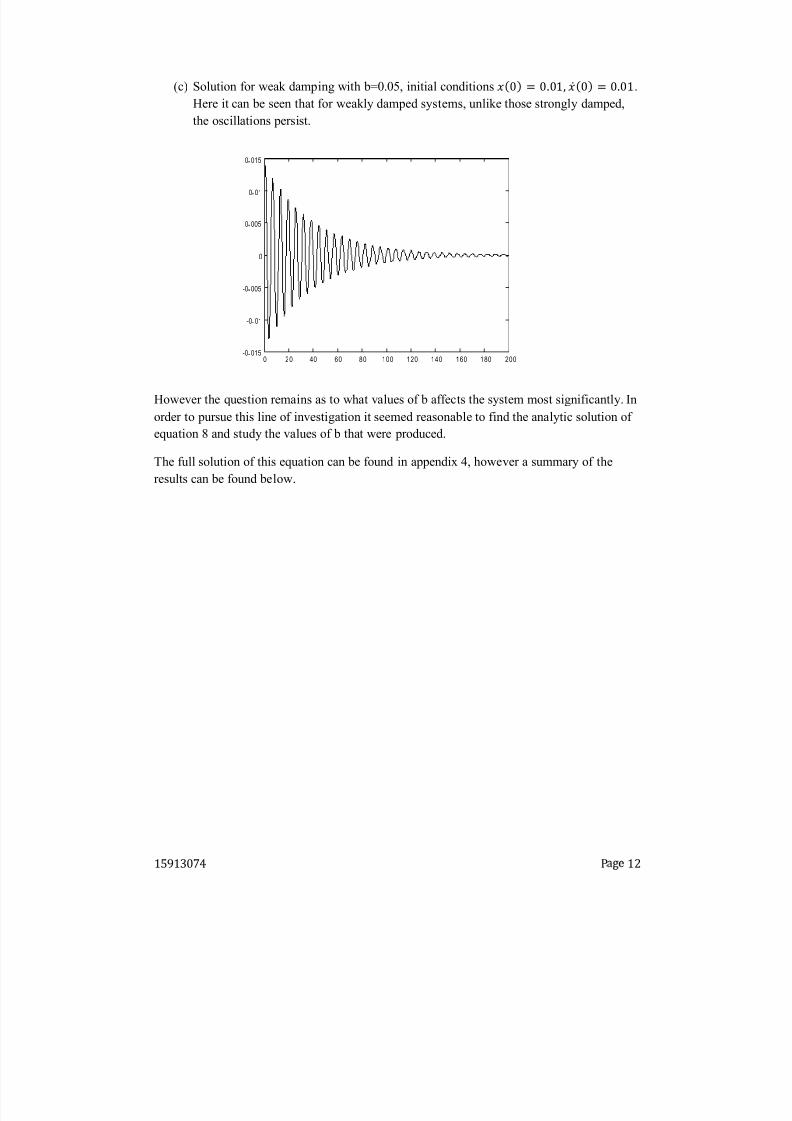
(c) Solution for weak damping with b=0.05, initial conditions .
Here it can be seen that for weak ly damped systems, unlike those strongly damped,
the oscillations persist.
However the question remains as to what values of b affects the system most signif icantly. In
order to pursue this line of investigation it seemed reasonable to f ind the analytic solution of
equation 8 and study the values of b that were produced.
The full solution of this equation can be found in appendix 4, however a summary of the
results can be found below.
0 20 40 60 80 100 120 140 160 180 200-0 015
-0 01
-0 005
0
0 005
0 01
0 015
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 13/26
15913074 Page 13
0 5 10 15 20 25 30 35 40 45 50-4
-2
0
2
4
6
8x 10
-3 b = 0 . 5 [0,0.01]
Equation 9
Auxiliary Equation
Equation 10
(a)
(b)
(c) General solution,
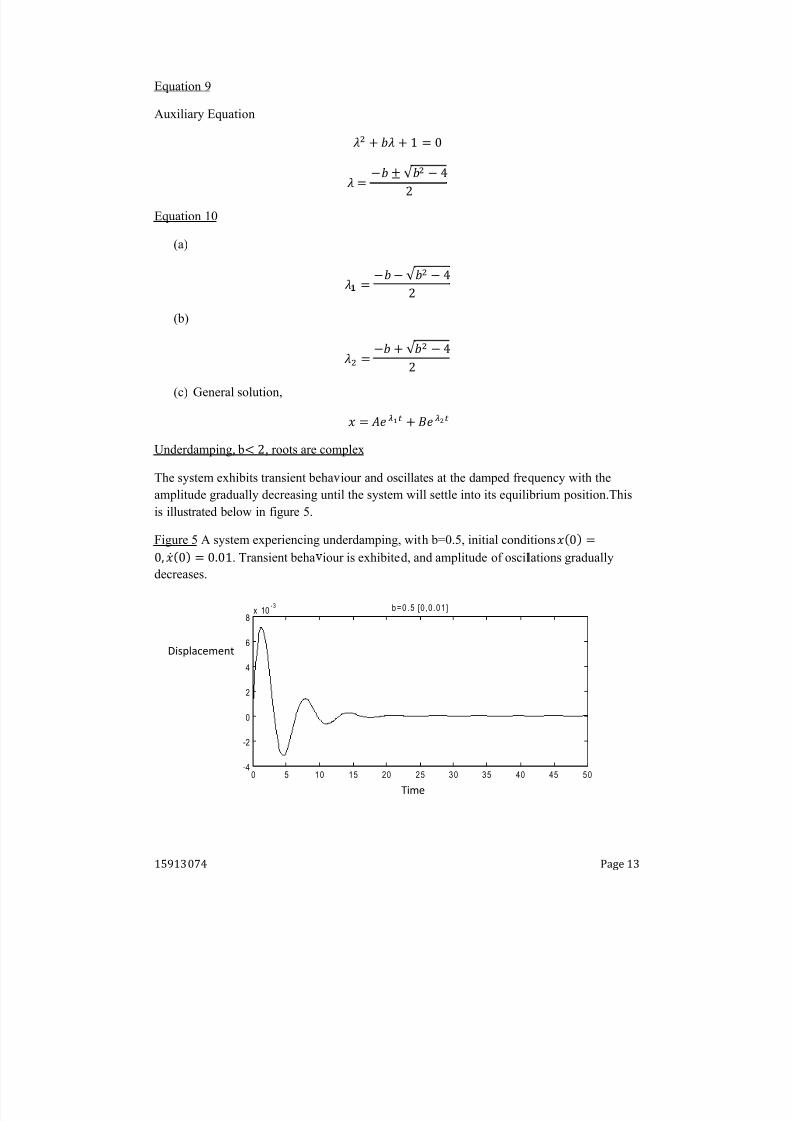
Underdamping, b , roots are complex
The system exhibits transient beha iour and oscillates at the damped frequency with the
amplitude gradually decreasing until the system will settle into its equilibrium position. This
is illustrated below in figure 5.
Figure 5 A system experiencing underdamping, with b=0.5, initial conditions . Transient beha iour is exhibited, and amplitude of oscillations gradually
decreases.
Time
Displacement
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 14/26
15913074 Page 14
0 5 10 15 20 25 30 35 40 45 50-2
0
2
4
6
8
10
12
14x 10
-3
0 5 10 15 20 25 30 35 40 45 50-2
0
2
4
6
8
10
12x 10
-3
Disp lacement
T i m
e
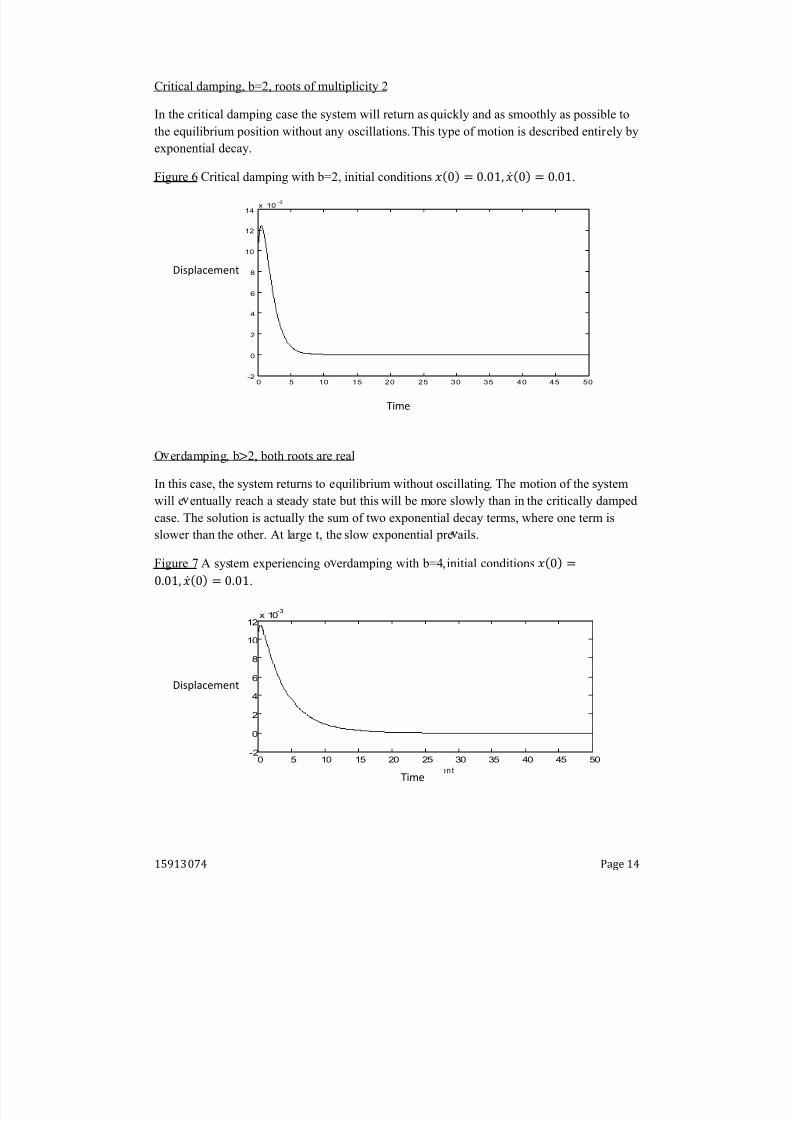
Critical damping, b=2, roots of multiplicity 2
In the critical damping case the system will return asquickly and as smoothly as possible to
the equilibrium position without any oscillations. This type of motion is described entirely by
exponential decay.
Figure 6 Critical damping with b=2, initial conditions .
O erdamping, b2, both roots are real
In this case, the system returns to equilibrium without oscillating. The motion of the system
will e entually reach a steady state but this will be more slowly than in the critically damped
case. The solution is actually the sum of two exponential decay terms, where one term is
slower than the other. At large t, the slow exponential pre ails.
Figure 7 A system experiencing o erdamping with b=4, initial conditions .
Displacement
Time
Time
Displacement
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 15/26
15913074 Page 15
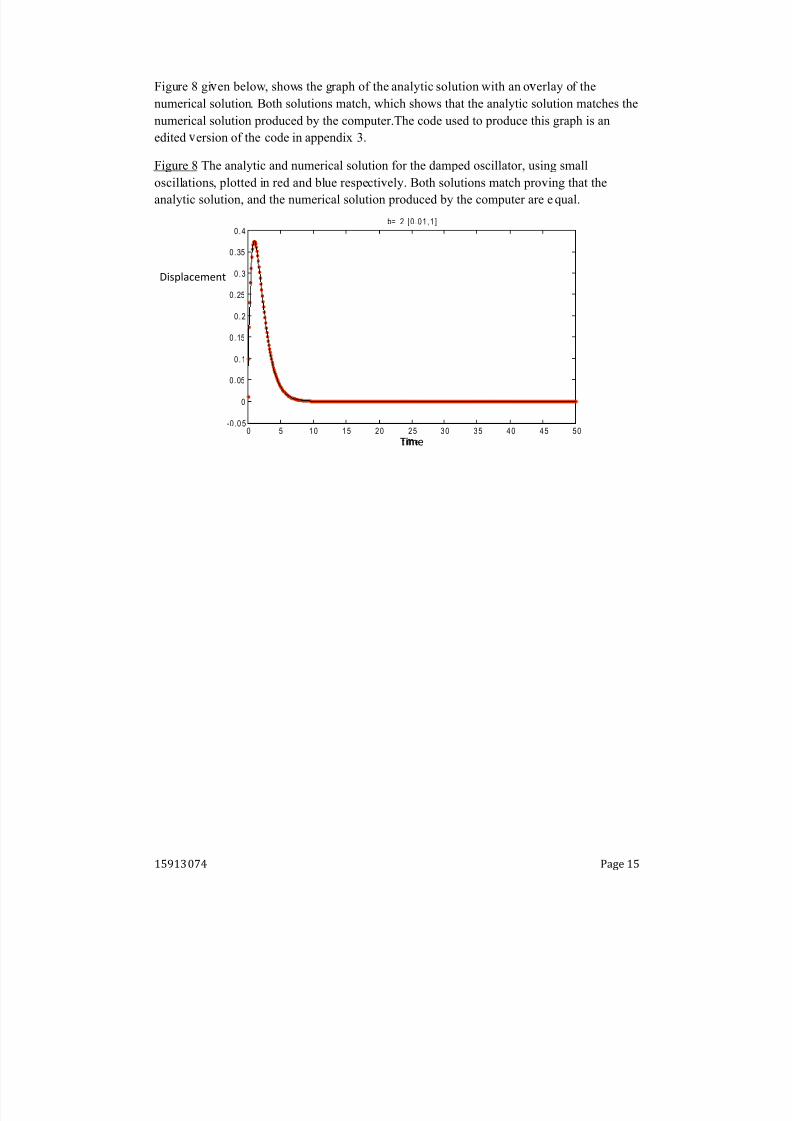
Figure 8 gi en below, shows the graph of the analytic solution with an o erlay of the
numerical solution. Both solutions match, which shows that the analytic solution matches the
numerical solution produced by the computer.The code used to produce this graph is an
edited ersion of the code in appendix 3.
Figure 8 The analytic and numerical solution for the damped oscillator, using small
oscillations, plotted in red and blue respecti ely. Both solutions match pro ing that the
analytic solution, and the numerical solution produced by the computer are equal.
Time
Displacement
0 5 10 15 20 25 30 35 40 45 50-0 .0 5
0
0 .05
0 .1
0 .15
0 .2
0 .25
0 .3
0 .35
0 .4
$
i% e
b= 2 [0 .01,1 ]
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 16/26
15913074 P 16
Driving force , no damping
Having investigated the implications of applying a damping force to the system it seemed like
a sensi ble idea to also investigate the type of motion produced when a dr iving force is
applied. A dr iving force is used to feed energy into the system.Therefore the equation of
motion to be studied is given by equation 11 below;
Equation 11
Where is the dr iving frequency, and is the amplitude of the dr iving force in this case.
As with other previous systems, equation 11 was investigated for both small oscillations i.e. , and large oscillations. In each case var ious values for and were investigated
using a range of initial conditions.
However, in both cases for small and large oscillations, a par ticular ly interesting result
occurred when .
To illustrate this result, a dr iving force was applied to the simple harmonic oscillator resulting
in equation 12 below.
Equation 12
The condition when the dr iving frequency is equal to the natural frequency of the system,
R esonance is the increase in the amplitude of an oscillation of a system, under the inf luence
of a per iodic force whose frequency is close to that of the system's natural frequency [7]. This
is illustrated in f igure 10 below.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 17/26
15913074 Page 17
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 0 1 8 0 2 0 0-10 0
-80
-60
-40
-20
0
20
40
60
80
10 0
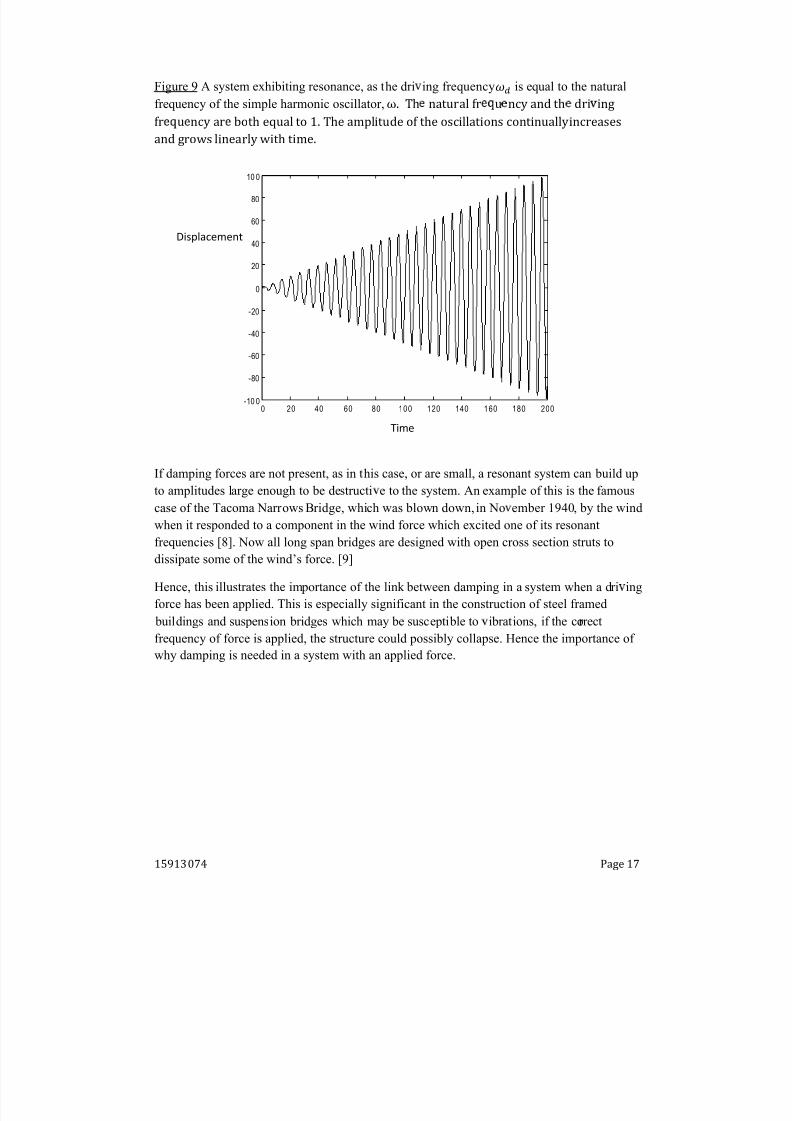
Figure 9 A system exhibiting resonance, as the dri ing frequency is equal to the natural
frequency of the simple harmonic oscillator,
If damping forces are not present, as in this case, or are small, a resonant system can build up
to amplitudes large enough to be destructi e to the system. An example of this is the famous
case of the Tacoma Narrows Bridge, which was blown down, in No ember 1940, by the wind
when it responded to a component in the wind force which excited one of its resonantfrequencies [8]. Now all long span bridges are designed with open cross section struts to
dissipate some of the wind¶s force. [9]
Hence, this illustrates the importance of the link between damping in a system when a dri ing
force has been applied. This is especially significant in the construction of steel framed
buildings and suspension bridges which may be susceptible to ibrations, if the correct
frequency of force is applied, the structure could possibly collapse. Hence the importance of
why damping is needed in a system with an applied force.
Time
Displacement
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 18/26
15913074 P 18
Damped, Driven Oscillator
Since the var ious types of motion within the system have been investigated, an appropr iate
progression was to investigate the system in its entirety with both damping and a dr iving
force applied.
The system to be investigated was given by equation 1, and is also shown below. Where b is the damping coeff icient, amplitude of dr iving force and is the dr iving
frequency.
The solution to equation of motion above is made up of two par ts, the transient and steady
state par t. The transient par t is the solution to the damping equation. A dr iven system will
ultimately settle down to a behaviour that is determined by the steady state par t of the
solution. Since the effects of the transient solution will ultimately die out, it seemed a natural
A sensi ble star ting point was to use the computer program to investigate the solution of the
above equation, using var ious values of , b and . This resulted in some interesting
obser vations. In this case the computer code was edited to produce phase diagrams, which
better showed the behaviour of the var ious results produced. The edited version of the
computer code used can be found in appendix 5.
It was found that if values b = 0.5 and were set for the system, and a small dr iving
amplitude, was applied, then once the transient effects had died out, the system
would exhi bit per iodic behaviour. This per iodic behaviour is due to the steady state par t of
the equation.
The dr iving amplitude was slightly increased to , and once transient effects died out,
the system exhi bited double per iodic behaviour.
Once again the dr iving amplitude was increased slightly to and af ter transient
effects had died out the system exhi bited chaotic behaviour.
This change in behaviour is resultant in only a slight change of dr iving amplitude suggesting
that this system is sensitive to initial conditions.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 19/26
15913074 P 19
Chaos
Although there is no def initive, universal def inition of chaos, a commonly used def inition
states that the following proper ties must be satisf ied for a dynamical system to be classif ied
as µchaotic¶. [10]
1. The system must be sensitive to initial conditions,2. It must be topologically mixing,
3. Its per iodic orbits must be dense.
The ³Butterf ly Effect´ is a common metaphor used to emphasise the concept that the system
is sensitive to the initial conditions enforced. ³Does the f lap of a butterf ly¶s wings set in
Brazil set off a tornado in Texas?´ - Phili p Mer ilees [11]. The phrase refers to the idea that the f lap of a butterf ly¶s wings can create tiny changes in the
atmosphere; changes which could alter the path or acceleration of a tornado, i.e. a small
change in the initial conditions can have a signif icant knock on effect to the behaviour of the
system.
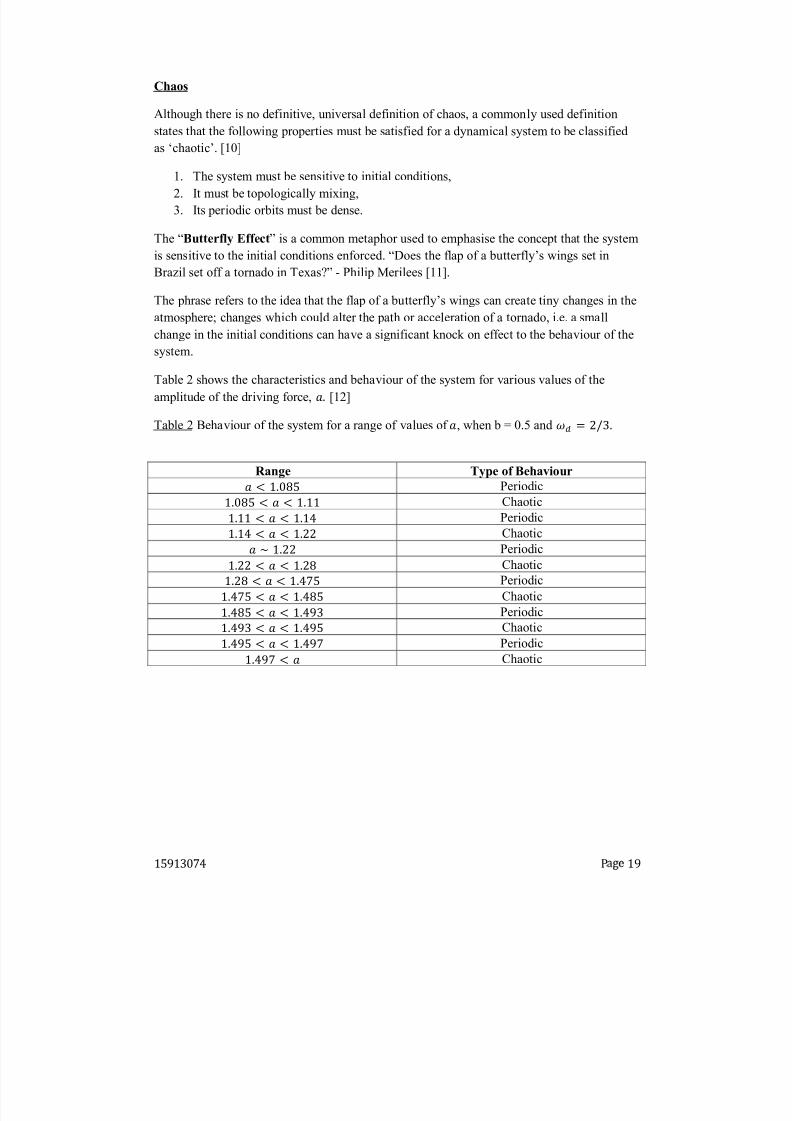
Table 2 shows the character istics and behaviour of the system for var ious values of the
amplitude of the dr iving force, [12]
Table 2 Behaviour of the system for a range of values of , when b = 0.5 and R ange Type of Behaviour Per iodic
Chaotic
Per iodic
Chaotic Per iodic Chaotic Per iodic Chaotic Per iodic Chaotic Per iodic Chaotic
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 20/26
15913074 P 20
-3 -2 -1 0 1 2 3-2
-1
0
1
2
3
& isp lace'
en(
)
n g u l a r V e l o c i
0
y
1 p2
a s e d ia gr a'
s2
o3
i ng p er o di c b e2
aviou r o 4 a s ys(
e'
3
2
en a= 0 .9 , b= 0 .5 a nd3
= 2/ 3
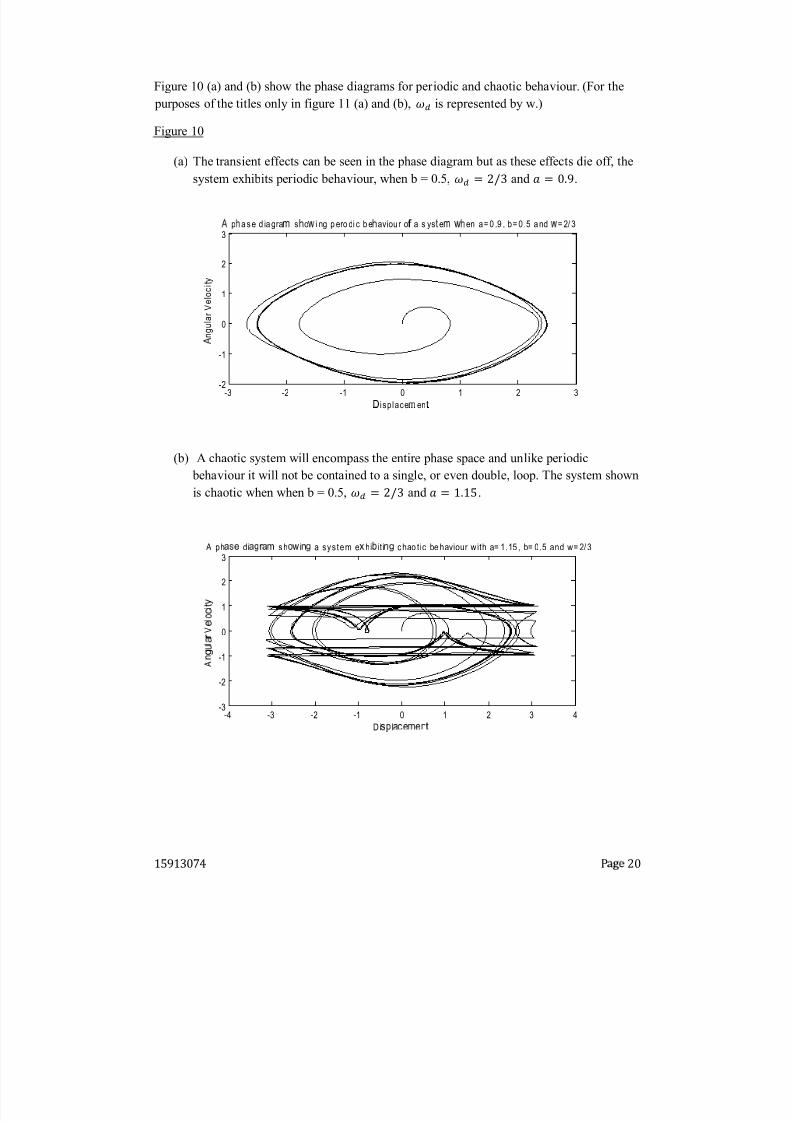
Figure 10 (a) and (b) show the phase diagrams for per iodic and chaotic behaviour. (For the
purposes of the titles only in f igure 11 (a) and (b), is represented by w.)
Figure 10
(a) The transient effects can be seen in the phase diagram but as these effects die off, the
system exhi bits per iodic behaviour, when b = 0.5, and .
(b) A chaotic system will encompass the entire phase space and unlike per iodic
behaviour it will not be contained to a single, or even double, loop. The system shown
is chaotic when when b = 0.5, and .
-4 -3 -2 -1 0 1 2 3 4-3
-2
-1
0
1
2
3
D i5
6
l7
8 9
@
9 A
B
A
C
D
E
lF
G
V
H
lI
P
iQ
R
A ph7
5 9
d i7
S
T 7 @
s hU V
iA S
a sys tem eW
h iX
itiA S
c hao t ic be haviour w ith a= 1 .15 , b= 0.5 and w= 2/ 3
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 21/26
15913074 P 21
-Y
.5Y Y
.5`
.5Y
Y .5
.5
D ia
b
lc d e
me f
t
A
g
g
h
li
r V
p
l
q
r
i ts
P t
if d c r e a e d t i t f t f c a u a t e
m e x h iv
it i f gb
e r i t w
id v e h c x
it y r
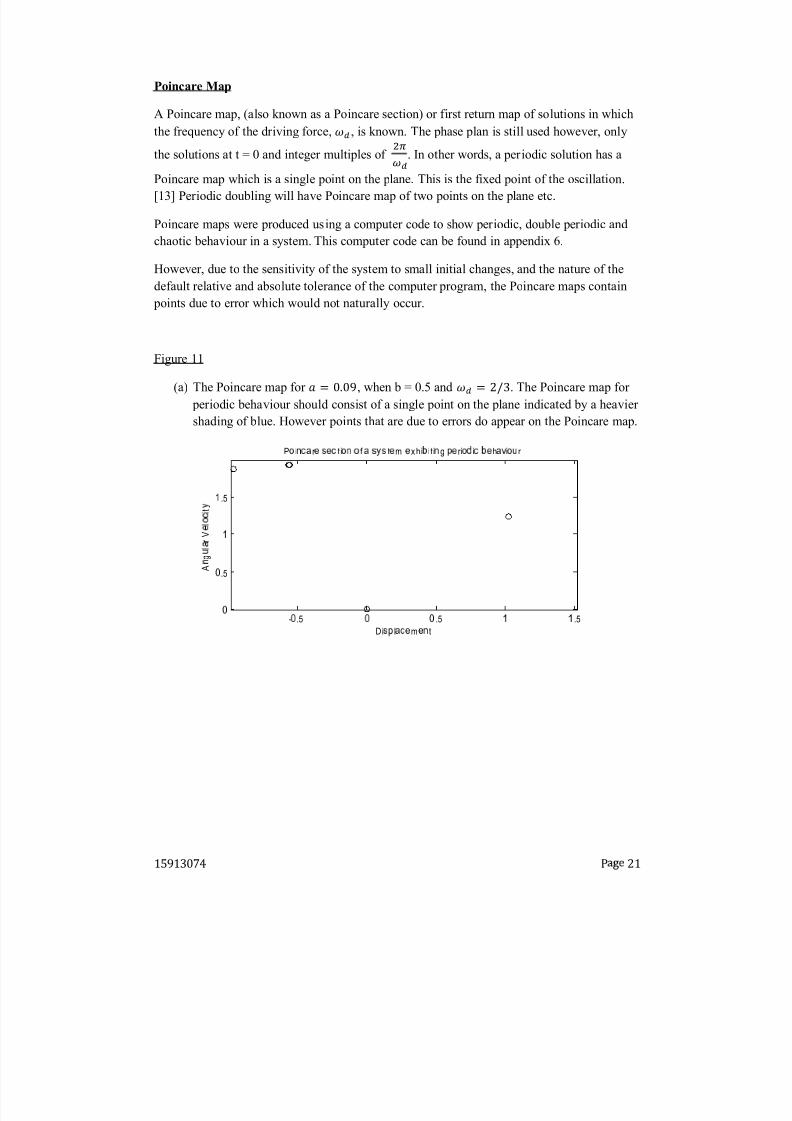
Poincare Map
A Poincare map, (also known as a Poincare section) or f irst return map of solutions in which
the frequency of the dr iving force, , is known. The phase plan is still used however, only
the solutions at t = 0 and integer multi ples of
. In other words, a per iodic solution has a
Poincare map which is a single point on the plane. This is the f ixed point of the oscillation.
[13] Per iodic doubling will have Poincare map of two points on the plane etc.
Poincare maps were produced using a computer code to show per iodic, double per iodic and
chaotic behaviour in a system.This computer code can be found in appendix 6.
However, due to the sensitivity of the system to small initial changes, and the nature of the
default relative and absolute tolerance of the computer program, the Poincare maps contain
points due to error which would not naturally occur.
Figure 11
(a) The Poincare map for , when b = 0.5 and . The Poincare map for
per iodic behaviour should consist of a single point on the plane indicated by a heavier
shading of blue. However points that are due to errors do appear on the Poincare map.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 22/26
15913074 P 22
-
.
-
.
5 -
.
-
.
5 -
.
-
.
5 -
.
.9
.9 5
.
5
is
l
c t
A
g
l
r V
l
c i t y
P
i
c
r
s
c t
i
s h
i
g
sy s t
x h i
it i
g
r i
ic
li
g
-
-
-
-
-
.5
.5
.5
.5
is
l
c
t
A
g
l
r V
l
c i t y
P
i
c
r
s
c ti
s h
i
g
s y s t
x hi
iti
g c h
t ic
h
vi
r
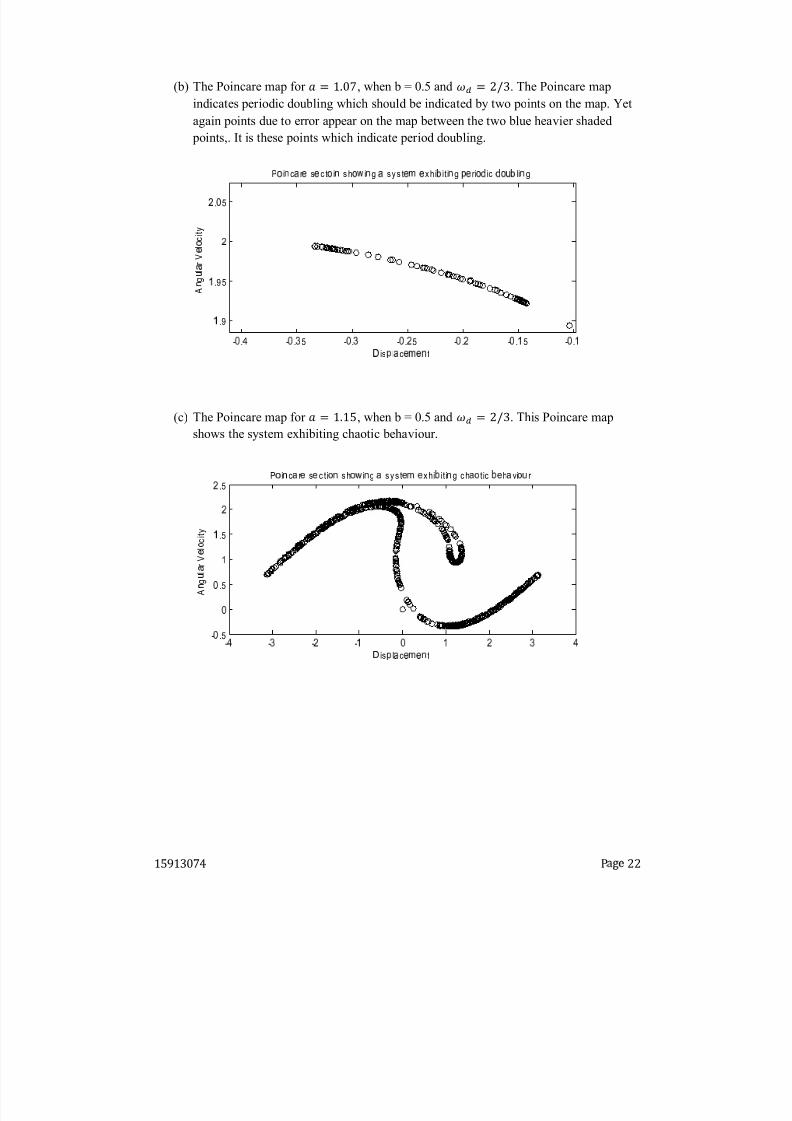
(b) The Poincare map for , when b = 0.5 and . The Poincare map
indicates per iodic doubling which should be indicated by two points on the map. Yet
again points due to error appear on the map between the two blue heavier shaded
points,. It is these points which indicate per iod doubling.
(c) The Poincare map for , when b = 0.5 and . This Poincare map
shows the system exhi biting chaotic behaviour.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 23/26
15913074 P 23
Extensions
1. Due to the sensitivity of the system to initial conditions and the default values of the
relative and absolute error, when the Poincare maps were plotted, error points were
included in the plot. The relative and absolute tolerance could be adjusted for the
program by using the options=odeset command. Var ious values for the tolerances
could be tested until the suff icient values are obtained to produce the Poincare maps
without points caused by errors.
2. Since a slight change in the initial conditions, namely the value of frequency of the
dr iving force, can completely change the behaviour of a system from per iodic to
chaotic it may be useful to plot bifurcation diagrams. Bifurcation diagrams could be
produced by creating another computer code in Matlab. The Bifurcation Diagrams
allow for compar isons between the per iodic and chaotic behaviours of the system.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 24/26
15913074 P 24
Conclusion
When neither damping nor dr iving force was applied to the system, the system exper ienced
simple harmonic motion with natural frequency=1.
When damping, but no dr iving force was applied to the system, and while using the
approximation of , the analytic solution produced the following results. When , they system exper ienced underdamping, when b = 2, cr itical damping occurred, and when the system exper ienced overdamping.
When only a dr iving force was applied, the system exhi bited behaviour of resonance when
the natural frequency of the system, which is equal to 1, was the same as the frequency of
the dr iving force, .
When both damping and dr iving force were applied, it was found that when b = 0.5 and=2/3, changing the amplitude of the dr iving force slightly, from to caused
the system to be per iodic and then chaotic respectively. This shows the sensitivity of the
system to changes in initial conditions. A range of values of were used from to . Phase diagrams and Poincare maps illustrated these f indings.
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 25/26
15913074 P 25
Ack nowledgements
I would like to acknowledge and thank Meredith Gr ieve for her time, patience and co-
operation provided to carry out this investigation; Dr H. Van der Har t and Dr G. Gr i bak in for
their guidance and hel p in producing the Matlab code needed for the investigation.
A list of fur ther resources used is given below;
[1] Lynch, Stephen. "Dynamical Systems with Applications using MATLAB".
Spr inger/Birkhauser, 2004.
[2] htt p://en.wik i pedia.org/wik i/Saddle_point, (23/02/10) [3] Weisstein, Er ic W. ³Elli ptic Fixed Point." From MathWorld --A Wolfram Web
R esource. htt p://mathwor ld.wolfram.com/Elli pticFixedPoint.html
[4] Weisstein, Er ic W. ³Jacobian." From MathWorld --A Wolfram Web
R esource. htt p://mathwor ld.wolfram.com/Jacobian.html
[5] Weisstein, Er ic W. ³Fixed Point." From MathWorld --A Wolfram Web
R esource. htt p://mathwor ld.wolfram.com/FixedPoint.html
[6] Fausett, Laurene V. ³Applied numer ical analysis using MATLAB´. Upper Saddle River,
NJ : London : Prentice Hall ; Prentice Hall International, c1999
[7] htt p://en.wik tionary.org/wik i/resonance, (25/02/10)
[8] htt p://hyperphys ics.phy-astr.gsu.edu/Hbase/oscdr2.html#c2 (23/02/10)
[9] htt p://hyper text book.com/chaos/41.shtml (22/02/10)
[10] htt p://en.wik i pedia.org/wik i/Chaos_ theory (26/02/10)
[11] htt p://en.wik i pedia.org/wik i/Chaos_ theory (26/02/10)
[12] Baker, Gregory L. Gollub, Jerry P. ³Chaotic Dynamics: an introduction . Cambr idge
University Press, NY; 1993.
[13] Smith, P. Smith, R .C. ³Mechanics´. John Wiley & Sons, 1990
Image on title page ± htt p://www.wor ldofstock.com/closeups/PR E9817.php (27/02/10)
8/8/2019 Investigations Osc
http://slidepdf.com/reader/full/investigations-osc 26/26