Embed Size (px)
Citation preview

Intructor: Prof. Chi-Jo WangReporter: Nguyen Phan ThanhID Student: DA220202
Southern Taiwan University of Science and Technology

FEEEEnsuring Enhanced Education
2
Contents• Introduction
• Mathematical model of PMSM
• Sensor Control Architechture
• High performance motor control application
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
3
PM synchronous motors are widely used in industrial servo-applications due to its high-performance characteristics. Compact High efficiency (no excitation current) Smooth torque Low acoustic noise Fast dynamic response (both torque and speed)
Introduction
A synchronous motor differs from an asynchronous motor in the relationship between the mechanical speed and the electrical speed.
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
4
Introduction
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
5
2-axis reference frame:The stator and rotor equations are referred to a common frame of reference • Stator (stationary) reference
frame : non-rotating • Synchronous reference frame: d, q axis rotates with the synchronous angular velocity
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
6
• The stator reference axis for the a-phase direction: maximum mmf when a positive a-phase current is supplied at its maximum level.
• The rotor reference frame: -D-axis: permanent magnet flux -Q-axis: 90 degree ahead of d-axis
The d-q model has been used to analyze reluctance synchronous machines.
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
7
• As the motor spins, there is an angle between rotor magnetic field and stator magnetic field
• If these two magnetic fields are not ninety degrees from each other, there will be an offset angle between Back EMF and Current:
=>the torque production at a given input power will not be the maximum
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
8
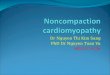
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
9
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
10
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
11
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
12
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction
FEEEEnsuring Enhanced Education
13
• With this animation we can see how the commutation angle is always ninety degrees ahead of the rotor.
• On the left we see how the motor spins with Field Oriented Control.
• On the voltage diagrams we show how the output voltages have a sinusoidal shape.
• On the lower right we see the rotor angle changing from minus pi (minus one eighty degrees) to plus pi (plus one eighty degrees).
Permanent Magnet Synchronous Motors
Introduction

FEEEEnsuring Enhanced Education
14
The mathematical model of PMSM is constructed based on the rotating d-q frame fixed to the rotor, described by the following equations:
Where: • v d, vq are the d and q axis voltages• id, iq are the d and q axis currents• Rs is the phase winding resistance • Ld, Lq are the d and q axis inductance• is the rotating speed of magnet
flux• is the permanent magnet flux
linkage.
Mathematical model of PMSM
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
15
Permanent Magnet Synchronous Motors
Mathematical model of PMSM
FEEEEnsuring Enhanced Education
16
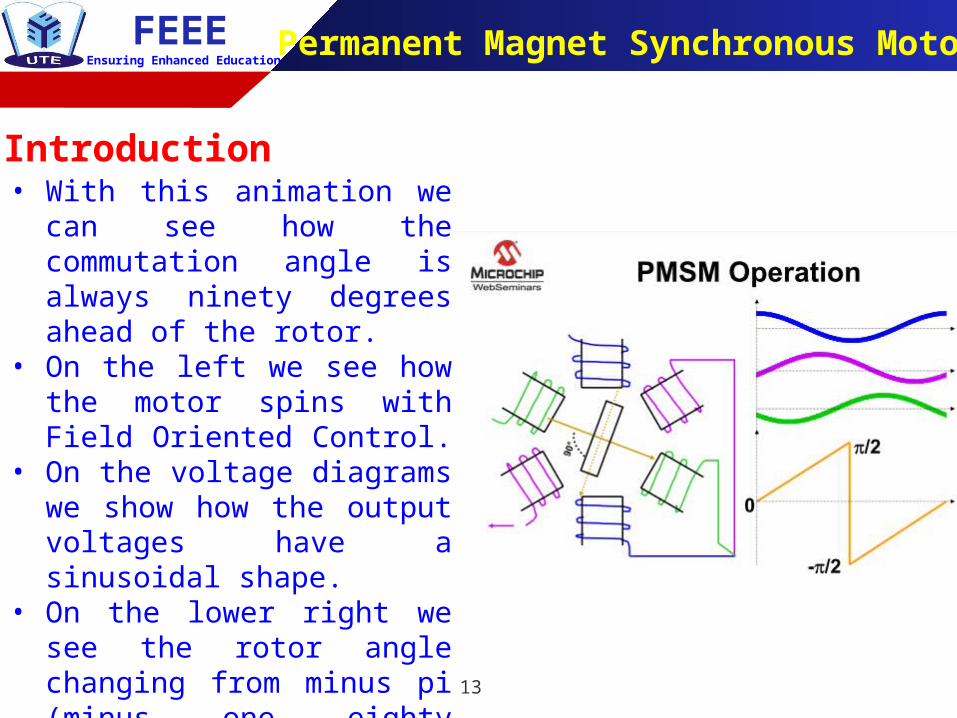
Command Pulse Deviation Counter Kp Kv Ki M
E
Speed detection
Current Feedback
Speed Feedback
Pulse Feedback
_
+ + +
_ _
Position Gain
Speed Gain CurrentGain
Motor
Encoder
Closed_loop Control
Permanent Magnet Synchronous Motors
Operation of PMSM

FEEEEnsuring Enhanced Education
17
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
PI, Fuzzy, Neural network are used to
the speed loop of PMSM drive
Vector control is used to the current loop of PMSM drive to let it reach the linearity and decouple characteristics.
Sensor Control Architechture
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
18
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
The entire process is illustrated in this block diagram, including coordinate transformations, PI iteration, transforming back and generating PWM
Sensor Control Architechture
Permanent Magnet Synchronous Motors
FEEEEnsuring Enhanced Education
19
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
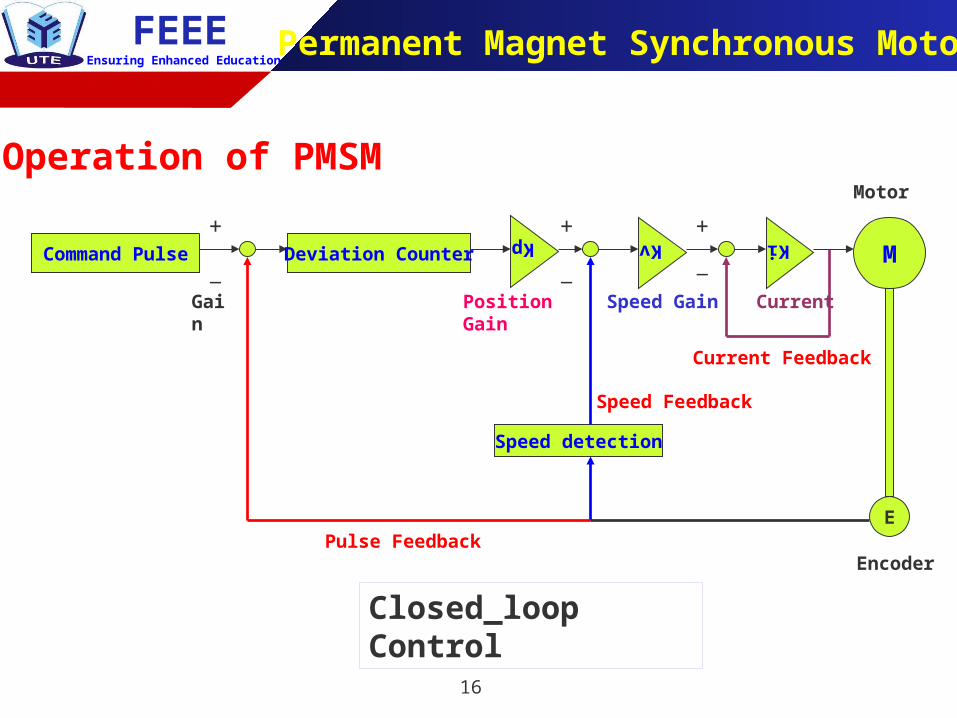
• The Id reference controls rotor magnetizing flux• The Iq reference controls the torque output of the motor• Id and Iq are only time-invariant under steady-state load conditions
Sensor Control Architechture
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
20
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
• The outputs of the PI controllers provide Vd and Vq, which is a voltage vector that is sent to the motor.
• A new coordinate transformation angle is calculated based on the motor speed, rotor electrical time constant, Id and Iq.
Sensor Control Architechture
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
21
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
• The Vd and Vq output values from the PI controllers are rotated back to the stationary reference frame, using the new angle.
• This calculation provides quadrature voltage values vα and vβ.
Sensor Control Architechture
Permanent Magnet Synchronous Motors
FEEEEnsuring Enhanced Education
22
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
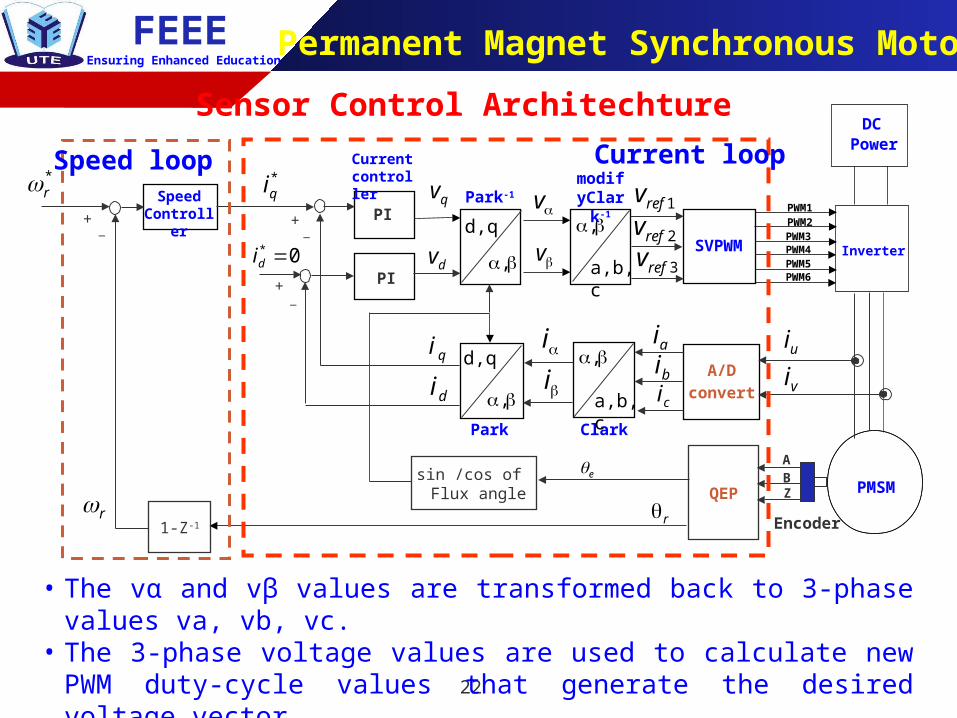
• The vα and vβ values are transformed back to 3-phase values va, vb, vc.
• The 3-phase voltage values are used to calculate new PWM duty-cycle values that generate the desired voltage vector.
Sensor Control Architechture
Permanent Magnet Synchronous Motors
FEEEEnsuring Enhanced Education
23
SVPWM
DCPower
PMSM
PI
Inverter
A/D
convert
PWM1
0* di
qi
di
ui
vi
Park Clark
Park-1
modifyClark-1
PWM6
—
—++
—PWM2PWM3PWM4PWM5
PI
1refv
3refv2refv
qv
dv
v
v
i
i
ai
bi
sin /cos of Flux angle QEP
*qi
r
*r
r1-Z-1 Encoder
ABZ
+
ci
a,b,c
,d,q
,
,
d,q ,
a,b,c
Current controller
SpeedController
Current loopSpeed loop
e
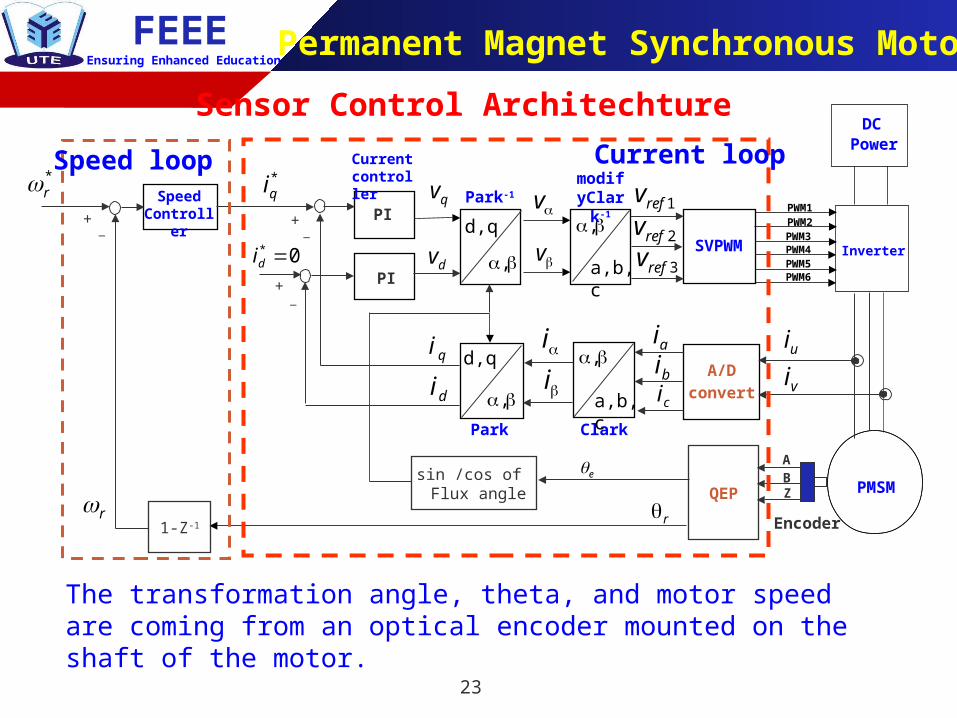
The transformation angle, theta, and motor speed are coming from an optical encoder mounted on the shaft of the motor.
Sensor Control Architechture
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
24
Motor Driver Controller
Permanent Magnet Synchronous Motors

FEEEEnsuring Enhanced Education
25
Industrial drives, e.g., pumps, fans, blowers, mills, hoists, handling systems Elevators and escalators, people movers, light railways and streetcars
(trams), electric road vehicles, aircraft flight control surface actuation
Permanent Magnet Synchronous Motors
High performance motor control application

FEEEEnsuring Enhanced Education
26
Permanent Magnet Synchronous Motors