Embed Size (px)
Citation preview
MIT Lincoln Laboratory071006-1S.T. SMITH
Intrinsic Estimation Bounds withSignal Processing Applications
Steven T. Smith
*MIT Lincoln Laboratory, Lexington, MA 02420; [email protected]. This work was sponsored by DARPA under Air Force contract FA8721-05-C-0002. Opinions, interpretations, conclusions, and recommendations are those of the author and are not necessarily endorsed by the United States Government.
MIT Lincoln Laboratory071006-2S.T. SMITH
Outline
• Geometry and signal processing
• Geometric view of estimation on manifolds
• Covariance matrix estimation
• Summary and conclusions
MIT Lincoln Laboratory071006-3S.T. SMITH
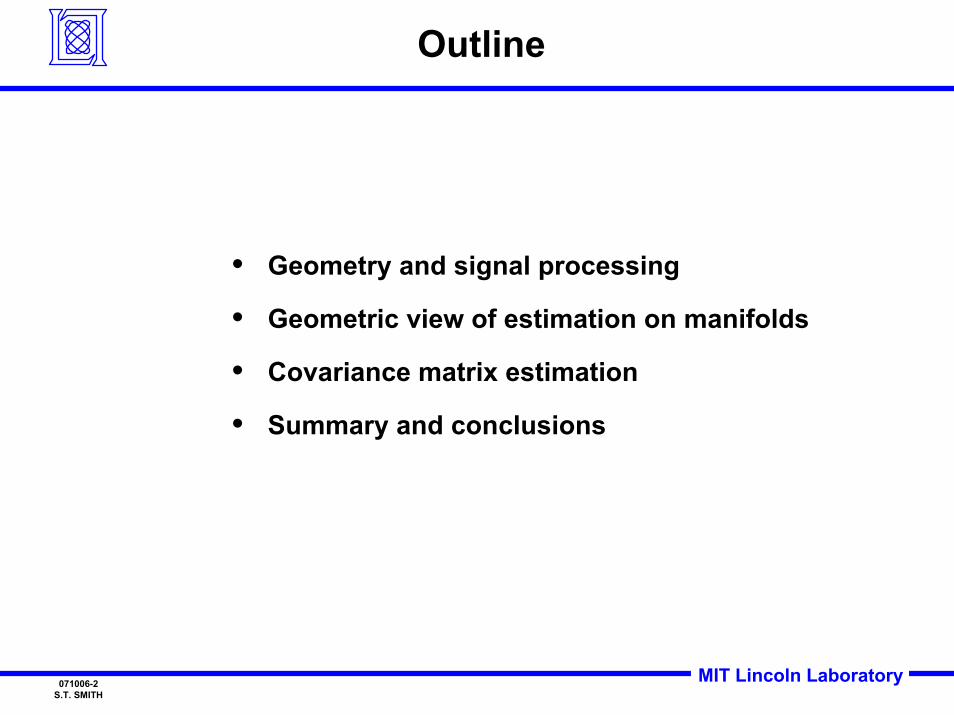
Applications That UseCovariance Matrix Estimation
Air and Ground Surveillance• Space-Time adaptive processing• SAR/GMTI• Tracking
Algorithms and systems analysis for detection, location, and classification of difficult signals all rely onsubspace and covariance-based methods
Algorithms and systems analysis for detection, location, and classification of difficult signals all rely onsubspace and covariance-based methods
Signals Intelligence• Spectral analysis• Superresolution
Robust Navigation• Adaptive beamforming
Undersea Surveillance• Adaptive beamforming• Spectral analysis• Tracking
AdvancedCommunications
• Adaptive beamforming• Spectral analysis• Speech
MIT Lincoln Laboratory071006-4S.T. SMITH
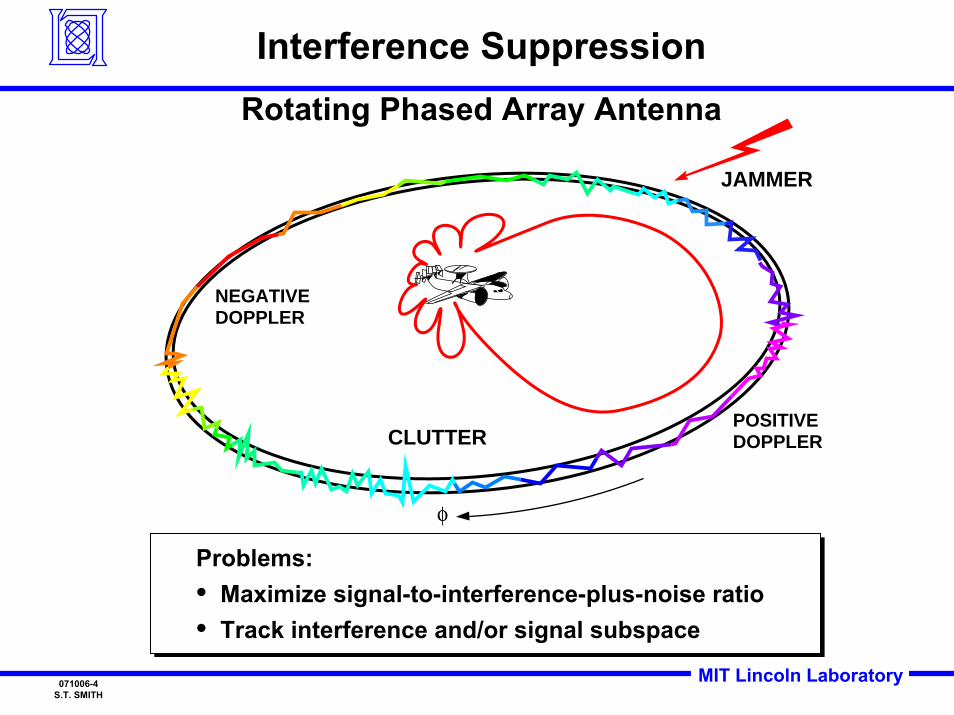
POSITIVEDOPPLER
NEGATIVEDOPPLER
CLUTTER
φ
JAMMER
Interference SuppressionRotating Phased Array Antenna
Problems:• Maximize signal-to-interference-plus-noise ratio• Track interference and/or signal subspace
Problems:• Maximize signal-to-interference-plus-noise ratio• Track interference and/or signal subspace
MIT Lincoln Laboratory071006-5S.T. SMITH
Do
pp
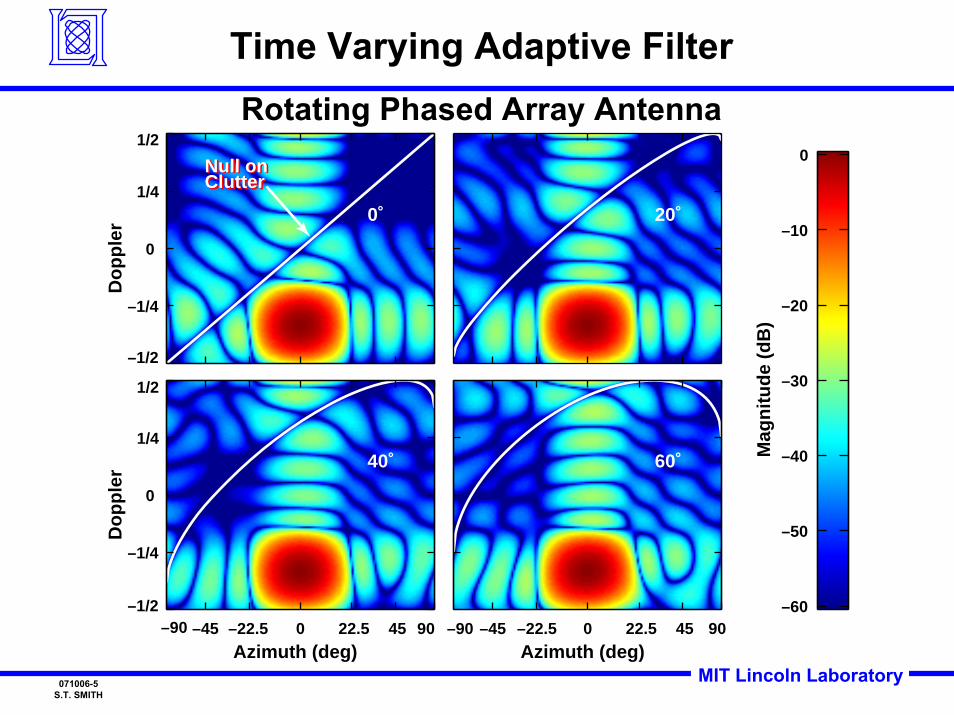
ler 0˚
Null onClutterNull onClutter
–1/2
–1/4
0
1/4
1/2
20˚
Do
pp
ler
Azimuth (deg)
40˚
–90 –45 –22.5 0 22.5 45 90 –1/2
–1/4
0
1/4
1/2
Mag
nit
ud
e (d
B)
–60
–50
–40
–30
–20
–10
0
Azimuth (deg)
60˚
–90 –45 –22.5 0 22.5 45 90
Time Varying Adaptive FilterRotating Phased Array Antenna
MIT Lincoln Laboratory071006-6S.T. SMITH
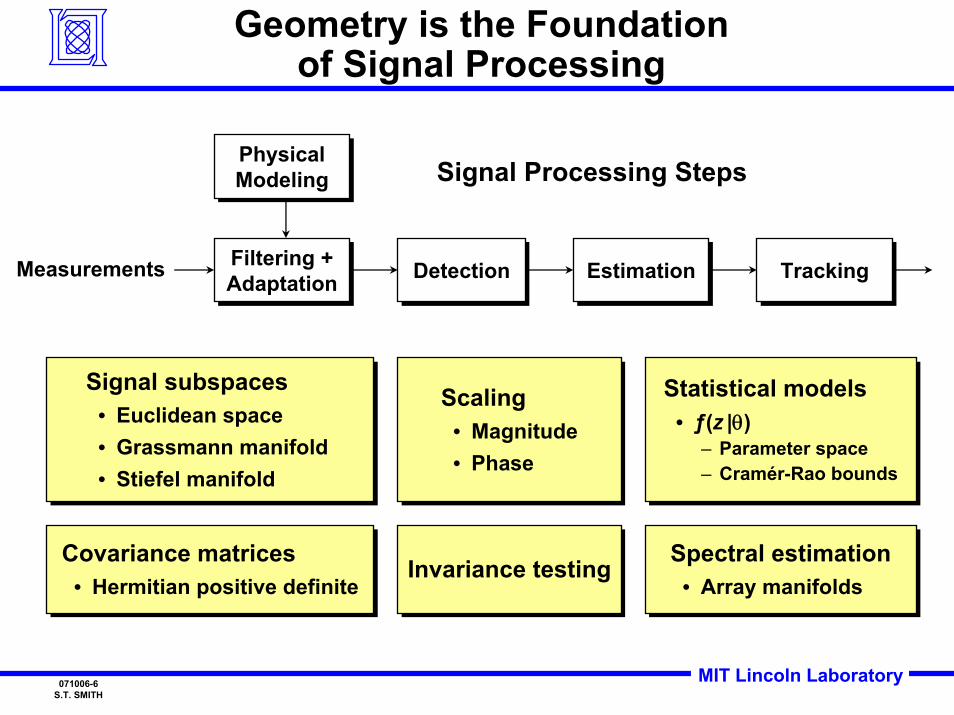
Geometry is the Foundationof Signal Processing
Covariance matrices• Hermitian positive definite
Covariance matrices• Hermitian positive definite
Signal subspaces• Euclidean space• Grassmann manifold • Stiefel manifold
Signal subspaces• Euclidean space• Grassmann manifold • Stiefel manifold
Scaling• Magnitude• Phase
Scaling• Magnitude• Phase
Invariance testingInvariance testing
Statistical models• ƒ(z |θ)
– Parameter space– Cramér-Rao bounds
Statistical models• ƒ(z |θ)
– Parameter space– Cramér-Rao bounds
Spectral estimation• Array manifolds
Spectral estimation• Array manifolds
Filtering +AdaptationFiltering +Adaptation DetectionDetection EstimationEstimation
PhysicalModelingPhysicalModeling
Measurements
Signal Processing Steps
TrackingTracking
MIT Lincoln Laboratory071006-7S.T. SMITH
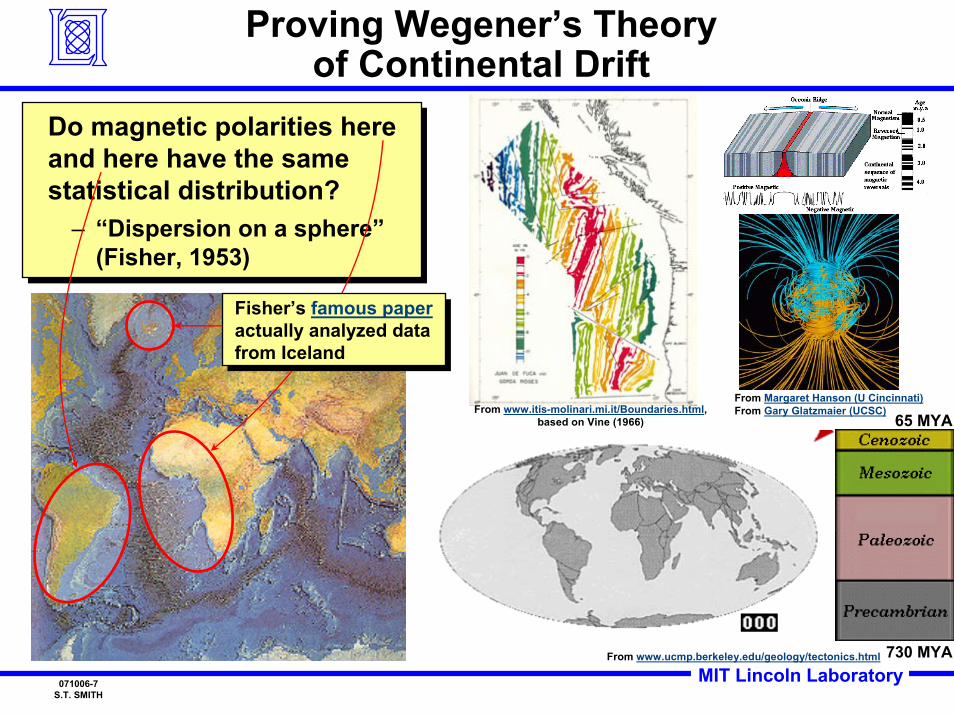
Proving Wegener’s Theoryof Continental Drift
From Margaret Hanson (U Cincinnati)From Gary Glatzmaier (UCSC)
From www.ucmp.berkeley.edu/geology/tectonics.html
From www.itis-molinari.mi.it/Boundaries.html,based on Vine (1966)
Do magnetic polarities here and here have the same statistical distribution?
– “Dispersion on a sphere”(Fisher, 1953)
Do magnetic polarities here and here have the same statistical distribution?
– “Dispersion on a sphere”(Fisher, 1953)
Fisher’s famous paperactually analyzed data from Iceland
Fisher’s famous paperactually analyzed data from Iceland
730 MYA
65 MYA
MIT Lincoln Laboratory071006-8S.T. SMITH
Outline
• Geometry and signal processing
• Geometric view of estimation on manifolds
• Covariance matrix estimation
• Summary and conclusions
MIT Lincoln Laboratory071006-9S.T. SMITH
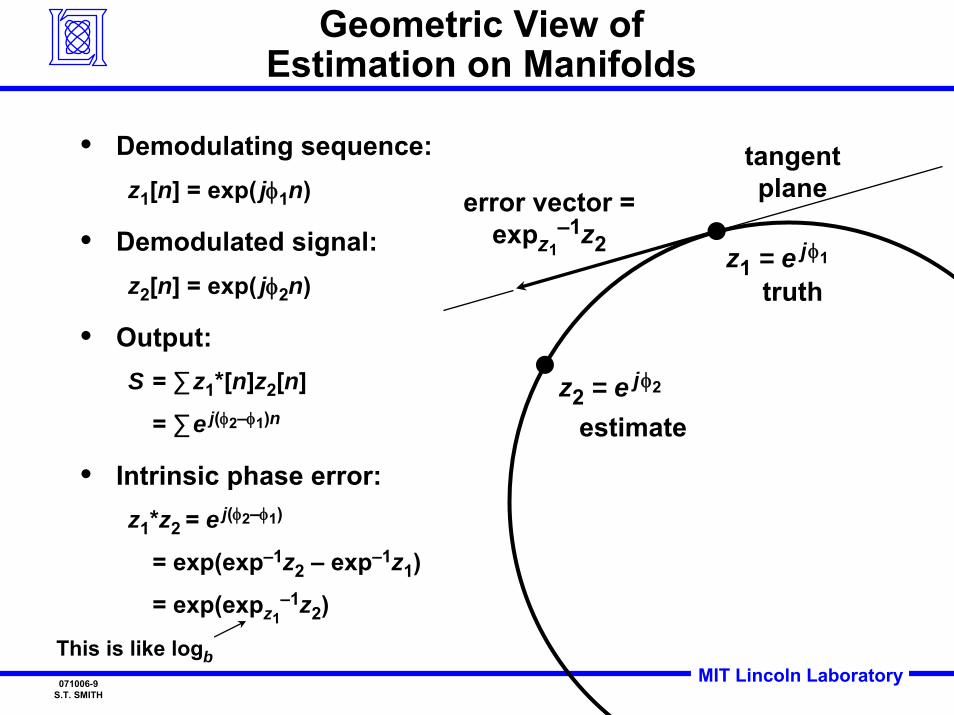
Geometric View ofEstimation on Manifolds
• Demodulating sequence:z1[n] = exp( jφ1n)
• Demodulated signal:z2[n] = exp( jφ2n)
• Output:S = ∑z1*[n]z2[n]
= ∑e j(φ2–φ1)n
• Intrinsic phase error:z1*z2 = e j(φ2–φ1)
= exp(exp–1z2 – exp–1z1)
= exp(expz1–1z2)
This is like logb
z2 = e jφ2
z1 = e jφ1
error vector = expz1
–1z2
tangent plane
truth
estimate
MIT Lincoln Laboratory071006-10S.T. SMITH
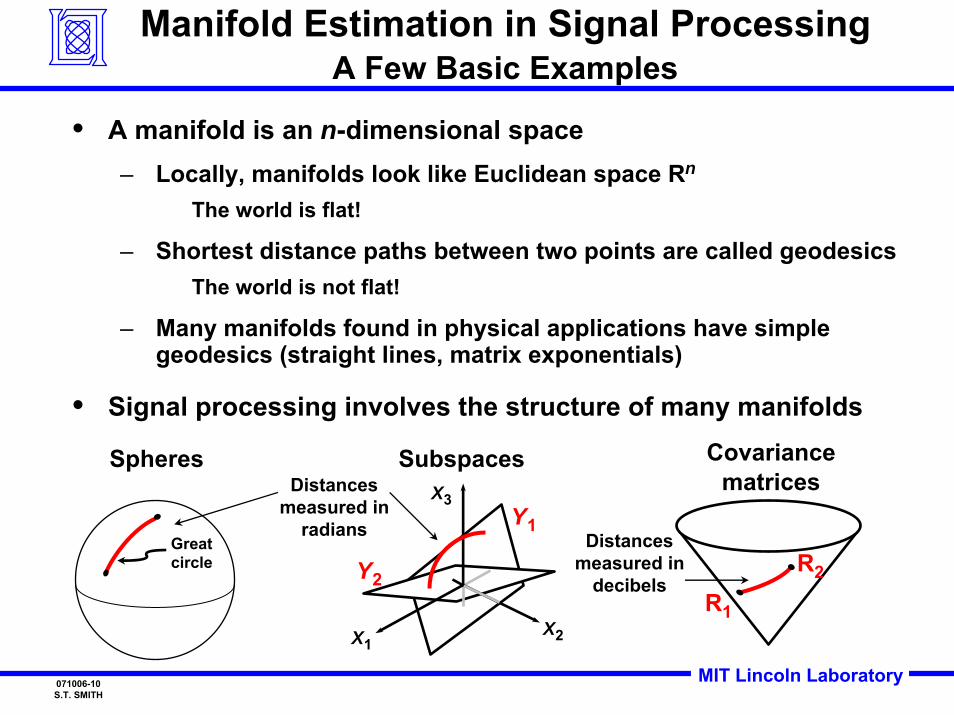
Manifold Estimation in Signal ProcessingA Few Basic Examples
• A manifold is an n-dimensional space– Locally, manifolds look like Euclidean space Rn
The world is flat!
– Shortest distance paths between two points are called geodesics The world is not flat!
– Many manifolds found in physical applications have simple geodesics (straight lines, matrix exponentials)
• Signal processing involves the structure of many manifolds
Spheres
Great circle
Subspaces Covariancematrices
X1X2
X3
R1
R2
Y1
Y2
Distancesmeasured in
radians Distancesmeasured in
decibels
MIT Lincoln Laboratory071006-11S.T. SMITH
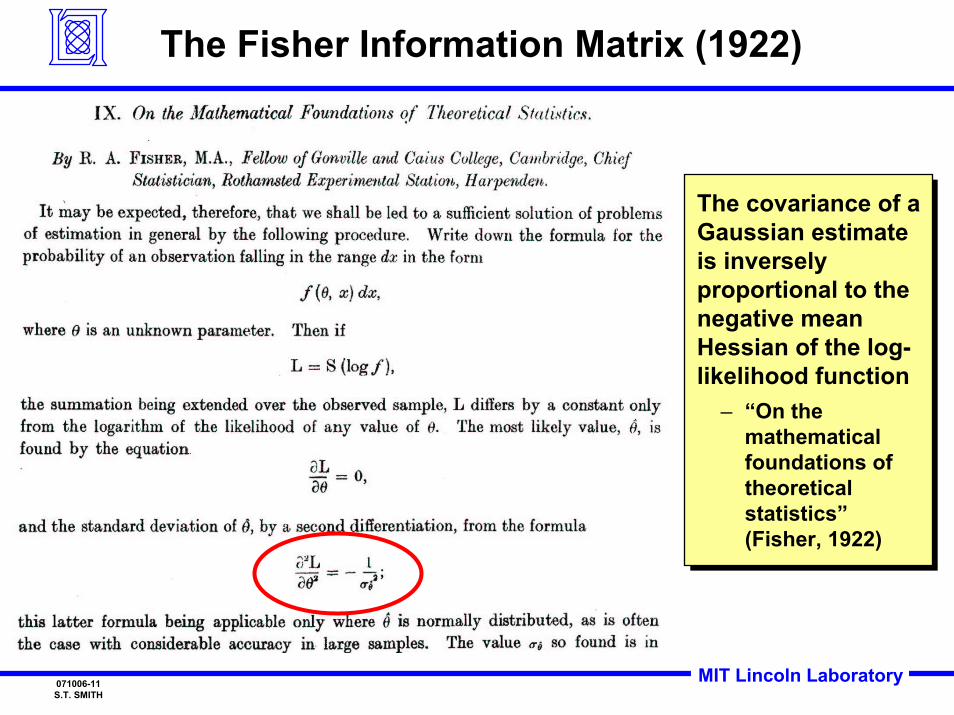
The Fisher Information Matrix (1922)
The covariance of a Gaussian estimate is inversely proportional to the negative mean Hessian of the log-likelihood function
– “On the mathematical foundations of theoretical statistics”(Fisher, 1922)
The covariance of a Gaussian estimate is inversely proportional to the negative mean Hessian of the log-likelihood function
– “On the mathematical foundations of theoretical statistics”(Fisher, 1922)
MIT Lincoln Laboratory071006-12S.T. SMITH
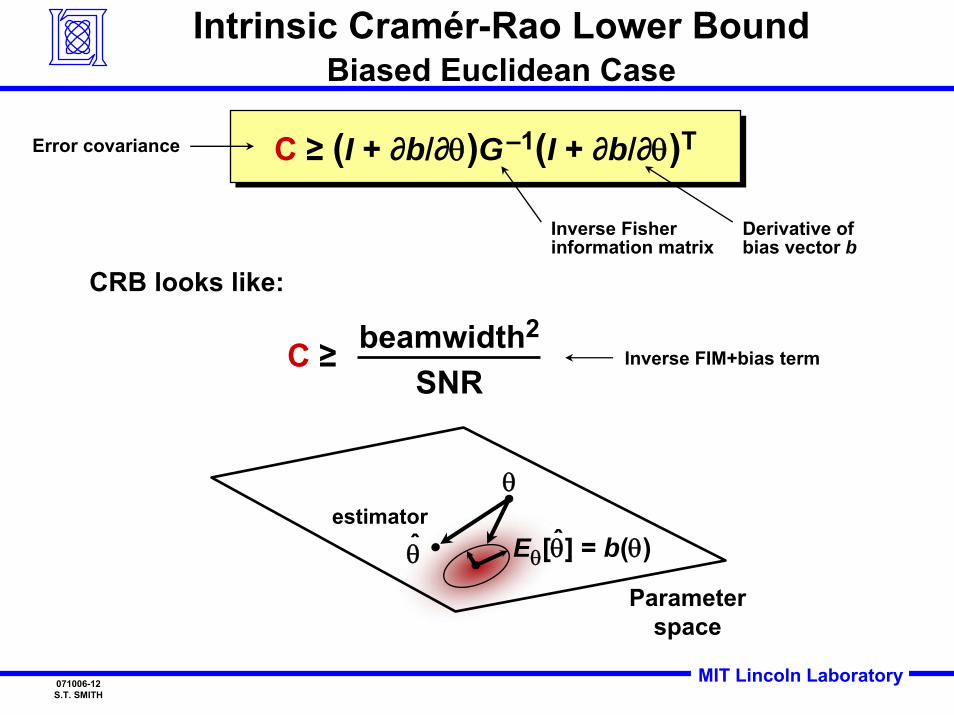
C ≥ (I + ∂b/∂θ)G–1(I + ∂b/∂θ)TC ≥ (I + ∂b/∂θ)G–1(I + ∂b/∂θ)T
Intrinsic Cramér-Rao Lower BoundBiased Euclidean Case
C ≥ beamwidth2
SNRInverse FIM+bias term
Error covariance
Inverse Fisher information matrix
CRB looks like:
Derivative of bias vector b
θ̂
θ
Parameterspace
estimatorˆEθ[θ] = b(θ)
MIT Lincoln Laboratory071006-13S.T. SMITH
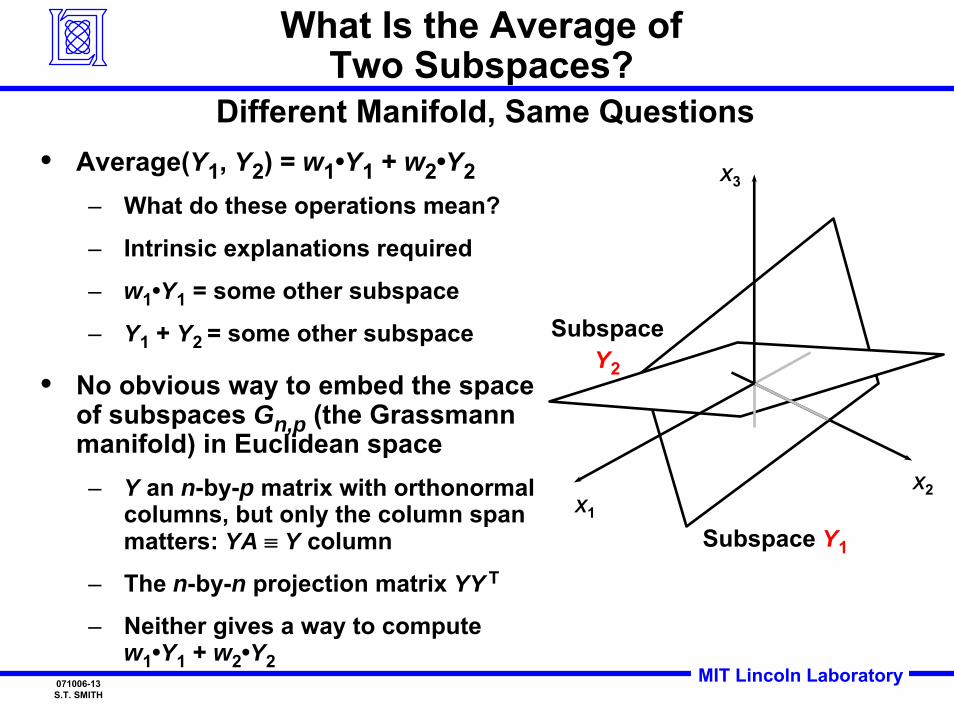
What Is the Average ofTwo Subspaces?
• Average(Y1, Y2) = w1•Y1 + w2•Y2– What do these operations mean?
– Intrinsic explanations required
– w1•Y1 = some other subspace
– Y1 + Y2 = some other subspace
• No obvious way to embed the space of subspaces Gn,p (the Grassmann manifold) in Euclidean space– Y an n-by-p matrix with orthonormal
columns, but only the column span matters: YA ≡ Y column
– The n-by-n projection matrix YY T
– Neither gives a way to compute w1•Y1 + w2•Y2
Different Manifold, Same Questions
X1
X2
X3
Subspace Y1
SubspaceY2
MIT Lincoln Laboratory071006-14S.T. SMITH
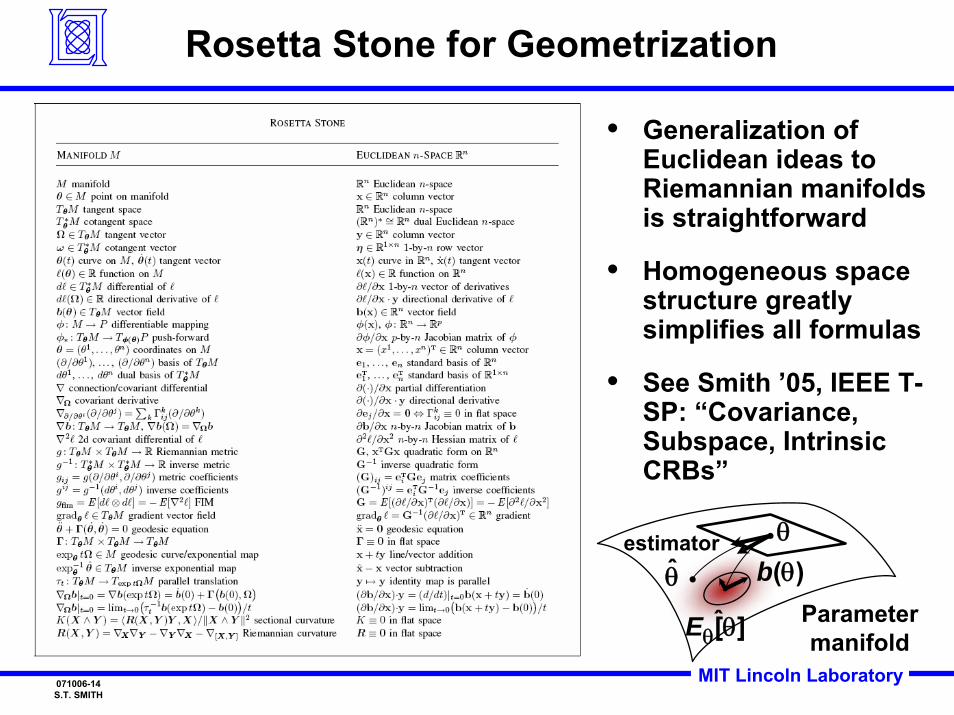
Rosetta Stone for Geometrization
θ
θ̂
ˆEθ[θ] Parametermanifold
estimatorb(θ)
• Generalization of Euclidean ideas to Riemannian manifolds is straightforward
• Homogeneous space structure greatly simplifies all formulas
• See Smith ’05, IEEE T-SP: “Covariance, Subspace, Intrinsic CRBs”
MIT Lincoln Laboratory071006-15S.T. SMITH
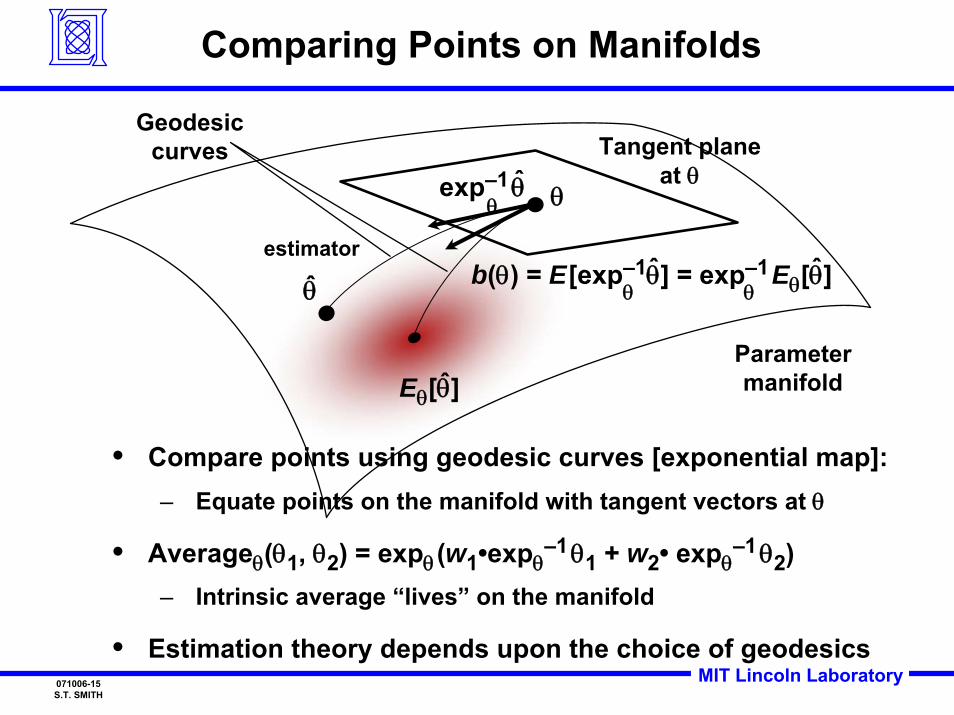
Comparing Points on Manifolds
• Compare points using geodesic curves [exponential map]:– Equate points on the manifold with tangent vectors at θ
• Averageθ(θ1, θ2) = expθ(w1•expθ–1 θ1 + w2• expθ
–1 θ2)– Intrinsic average “lives” on the manifold
• Estimation theory depends upon the choice of geodesics
θ
θ̂
ˆEθ[θ]Parametermanifold
estimator
Tangent planeat θexp–1 θ̂
θ
Geodesiccurves
b(θ) = E[exp–1θ] = exp–1Eθ[θ]ˆθ
ˆθ
MIT Lincoln Laboratory071006-16S.T. SMITH
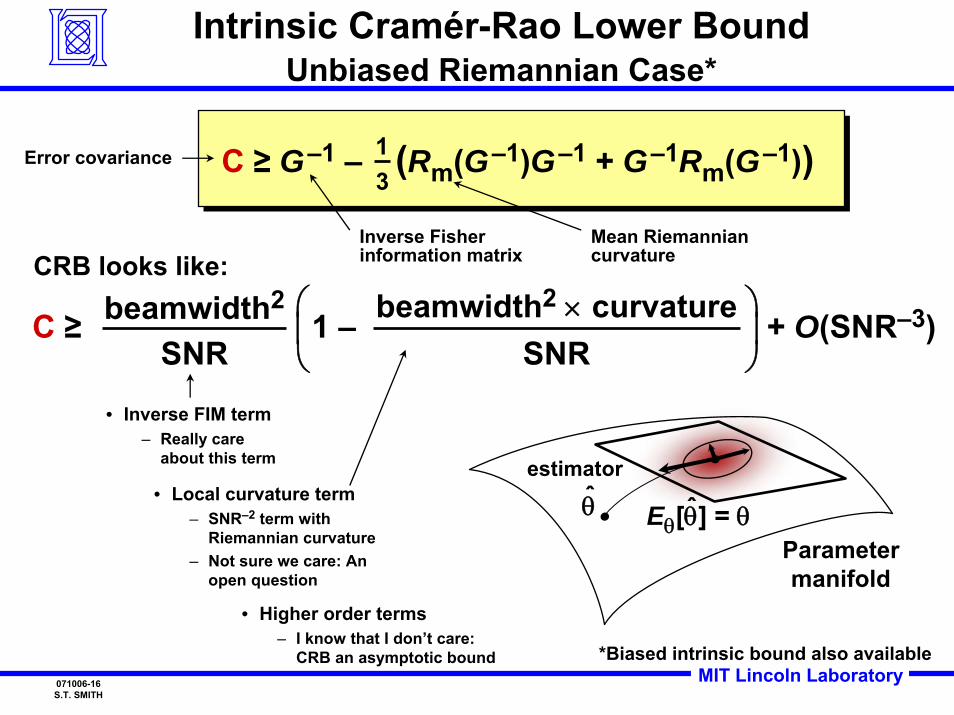
Intrinsic Cramér-Rao Lower BoundUnbiased Riemannian Case*
θ̂ ˆEθ[θ] = θParametermanifold
estimator
C ≥ beamwidth2
SNR⎛⎜⎝
⎞⎟⎠
1 – beamwidth2 × curvatureSNR
+ O(SNR–3)
• Inverse FIM term– Really care
about this term
• Local curvature term– SNR–2 term with
Riemannian curvature– Not sure we care: An
open question
• Higher order terms– I know that I don’t care:
CRB an asymptotic bound
C ≥ G–1 – (Rm(G–1)G–1 + G–1Rm(G–1))C ≥ G–1 – (Rm(G–1)G–1 + G–1Rm(G–1))
Inverse Fisher information matrix
Mean Riemannian curvature
13
CRB looks like:
Error covariance
*Biased intrinsic bound also available
MIT Lincoln Laboratory071006-17S.T. SMITH
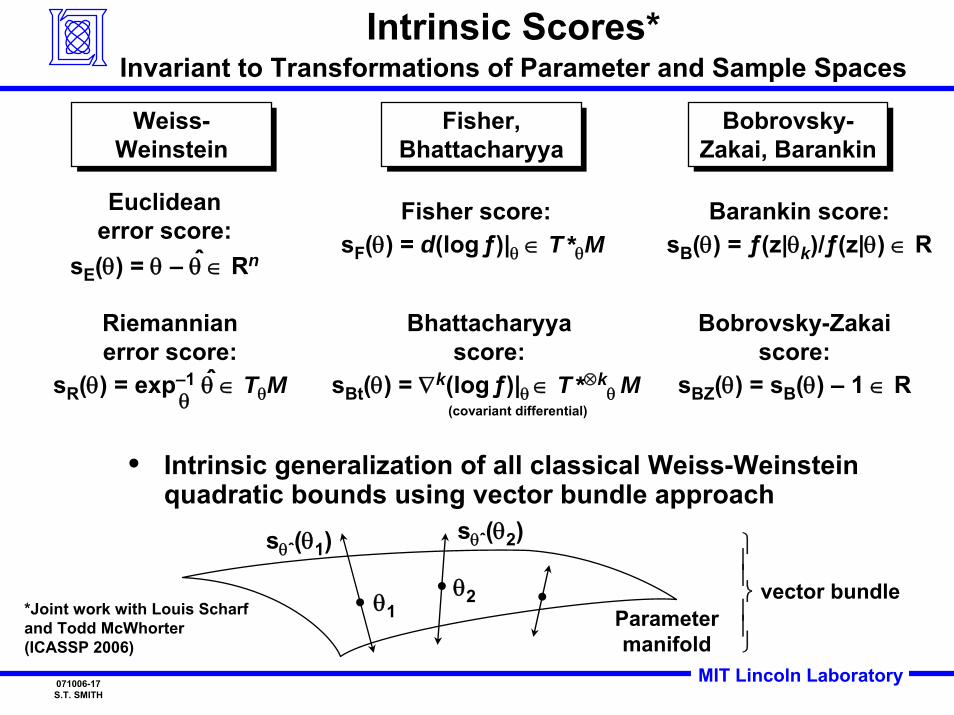
Intrinsic Scores*Invariant to Transformations of Parameter and Sample Spaces
Weiss-WeinsteinWeiss-
WeinsteinFisher,
BhattacharyyaFisher,
BhattacharyyaBobrovsky-
Zakai, BarankinBobrovsky-
Zakai, Barankin
Fisher score:sF(θ) = d(log ƒ)|θ ∈ T*θM
Riemannianerror score:
sR(θ) = exp–1 θ ∈ TθMˆθ
Euclideanerror score:
sE(θ) = θ – θ ∈ Rnˆ
Bhattacharyyascore:
sBt(θ) = ∇k(logƒ)|θ ∈ T*⊗kθ M
Bobrovsky-Zakaiscore:
sBZ(θ) = sB(θ) – 1 ∈ R
Barankin score:sB(θ) = ƒ(z|θk)/ƒ(z|θ) ∈ R
• Intrinsic generalization of all classical Weiss-Weinstein quadratic bounds using vector bundle approach
(covariant differential)
Parametermanifold
vector bundle
sθˆ(θ1) ⎫⎪⎬
⎪⎭
⎪
⎪
sθˆ(θ2)
θ1θ2
*Joint work with Louis Scharfand Todd McWhorter (ICASSP 2006)
MIT Lincoln Laboratory071006-18S.T. SMITH
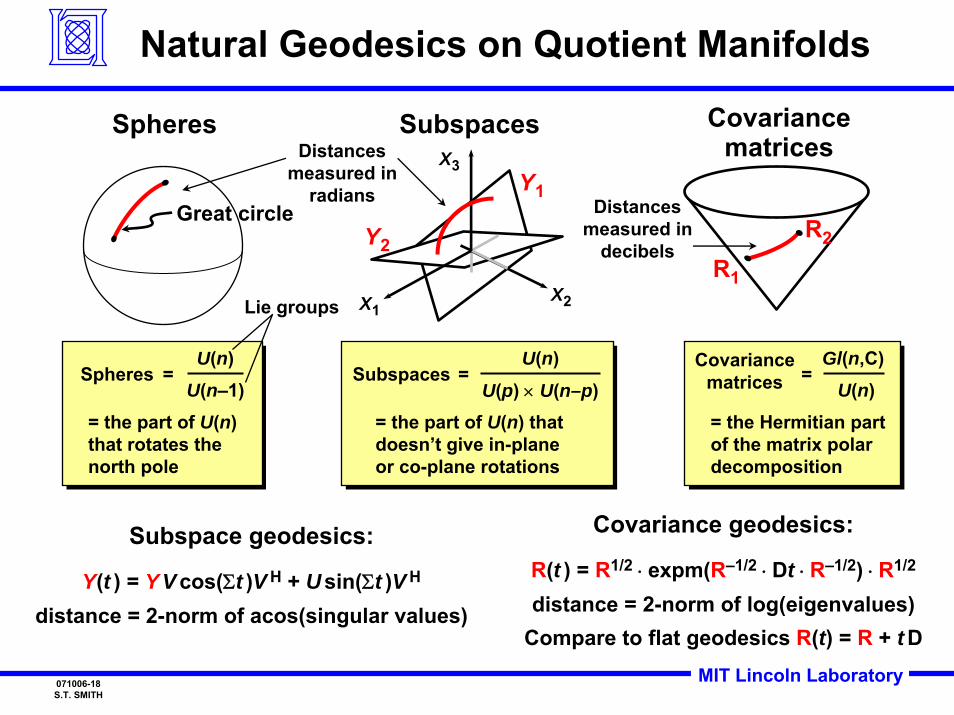
Natural Geodesics on Quotient Manifolds
Spheres
Great circle
Covariance geodesics:
R(t ) = R1/2 ⋅ expm(R–1/2 ⋅ Dt ⋅ R–1/2) ⋅ R1/2
distance = 2-norm of log(eigenvalues)Compare to flat geodesics R(t) = R + t D
Subspace geodesics:
Y(t ) = YVcos(Σt )V H + Usin(Σt )V H
distance = 2-norm of acos(singular values)
Subspaces Covariancematrices
X1X2
X3
Subspaces =U(n)
U(p) × U(n–p) = the part of U(n) that doesn’t give in-plane or co-plane rotations
Covariancematrices =
Gl(n,C)U(n)
= the Hermitian part of the matrix polar decomposition
Spheres =U(n)
U(n–1)= the part of U(n) that rotates the north pole
Lie groups
R1
R2
Y1
Y2
Distancesmeasured in
radians Distancesmeasured in
decibels
MIT Lincoln Laboratory071006-19S.T. SMITH
Outline
• Geometry and signal processing
• Geometric view of estimation on manifolds
• Covariance matrix estimation
• Summary and conclusions
MIT Lincoln Laboratory071006-20S.T. SMITH
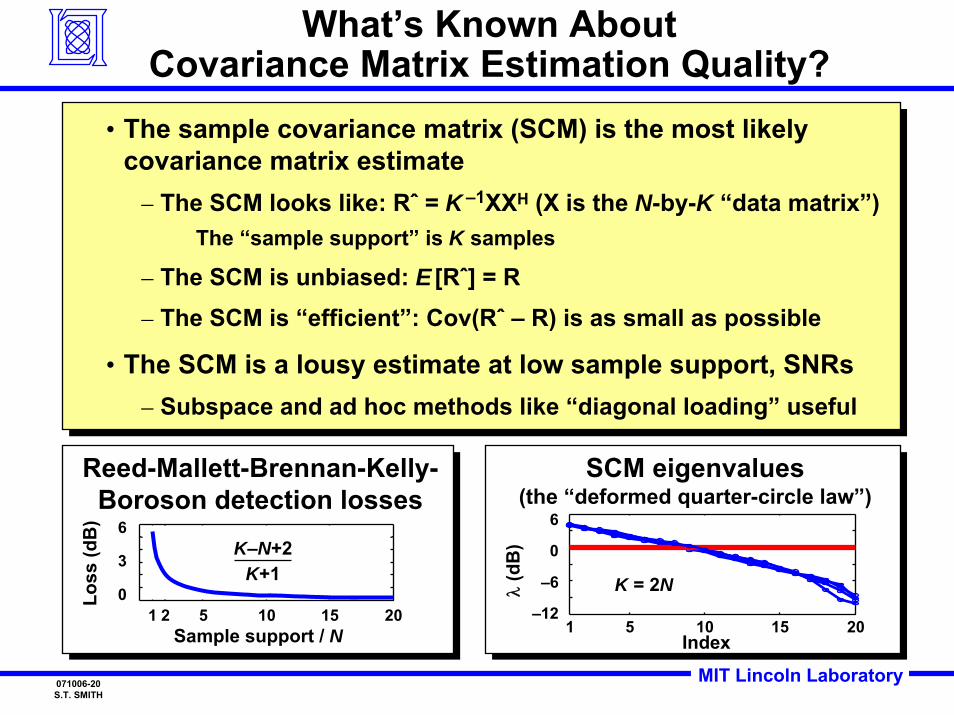
Reed-Mallett-Brennan-Kelly-Boroson detection losses
Reed-Mallett-Brennan-Kelly-Boroson detection losses
1 2 5 10 15 200
3
6
Sample support / N
Loss
(dB
)
K–N+2K+1
SCM eigenvalues(the “deformed quarter-circle law”)
SCM eigenvalues(the “deformed quarter-circle law”)
1 5 10 15 20–12
–6
0
6
Index
λ(d
B)
K = 2N
What’s Known AboutCovariance Matrix Estimation Quality?
• The sample covariance matrix (SCM) is the most likely covariance matrix estimate
– The SCM looks like: Rˆ = K –1XXH (X is the N-by-K “data matrix”)The “sample support” is K samples
– The SCM is unbiased: E [Rˆ] = R– The SCM is “efficient”: Cov(Rˆ – R) is as small as possible
• The SCM is a lousy estimate at low sample support, SNRs– Subspace and ad hoc methods like “diagonal loading” useful
• The sample covariance matrix (SCM) is the most likely covariance matrix estimate
– The SCM looks like: Rˆ = K –1XXH (X is the N-by-K “data matrix”)The “sample support” is K samples
– The SCM is unbiased: E [Rˆ] = R– The SCM is “efficient”: Cov(Rˆ – R) is as small as possible
• The SCM is a lousy estimate at low sample support, SNRs– Subspace and ad hoc methods like “diagonal loading” useful
MIT Lincoln Laboratory071006-21S.T. SMITH
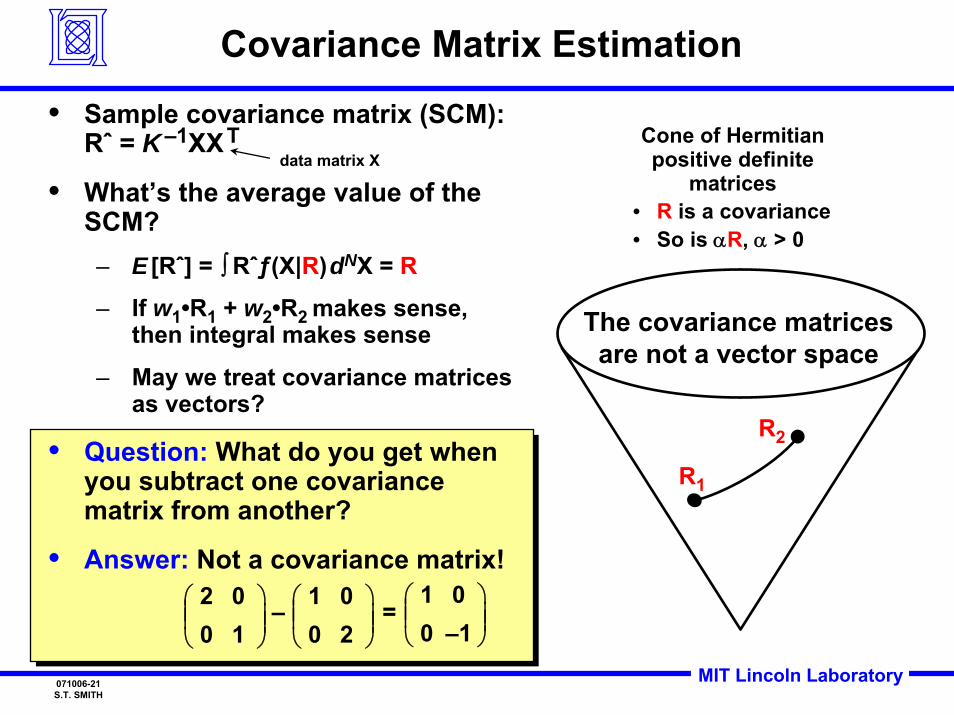
Covariance Matrix Estimation
• Sample covariance matrix (SCM): Rˆ = K–1XXT
• What’s the average value of the SCM?– E [Rˆ] = ∫ Rˆƒ(X|R)dNX = R
– If w1•R1 + w2•R2 makes sense, then integral makes sense
– May we treat covariance matrices as vectors?
• Question: What do you get when you subtract one covariance matrix from another?
• Answer: Not a covariance matrix!20
⎛
⎝⎜⎜
01
⎞⎟⎠⎟
10
⎛
⎝⎜⎜
02
⎞⎟⎠⎟
10
⎛
⎝⎜⎜
0–1
⎞⎟⎠⎟– =
Cone of Hermitian positive definite
matrices• R is a covariance• So is αR, α > 0
R1
R2
The covariance matrices are not a vector space
data matrix X
MIT Lincoln Laboratory071006-22S.T. SMITH
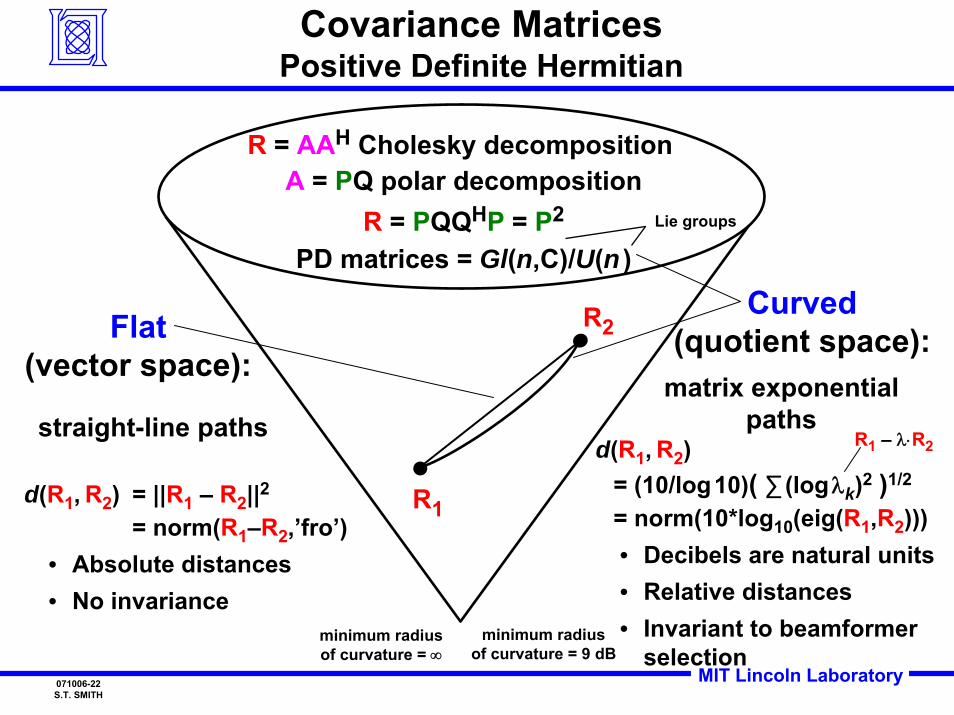
Covariance MatricesPositive Definite Hermitian
R = AAH Cholesky decomposition A = PQ polar decomposition
R = PQQHP = P2
PD matrices = Gl(n,C)/U(n )
Flat(vector space):
Curved(quotient space):
R1
R2
d(R1, R2) = ||R1 – R2||2= norm(R1–R2,’fro’)
• Absolute distances• No invariance
straight-line pathsmatrix exponential
pathsd(R1, R2)
= (10/log10)( ∑ (logλk)2 )1/2
= norm(10*log10(eig(R1,R2)))• Decibels are natural units• Relative distances• Invariant to beamformer
selection
R1 – λ⋅R2
minimum radiusof curvature = ∞
minimum radiusof curvature = 9 dB
Lie groups
MIT Lincoln Laboratory071006-23S.T. SMITH
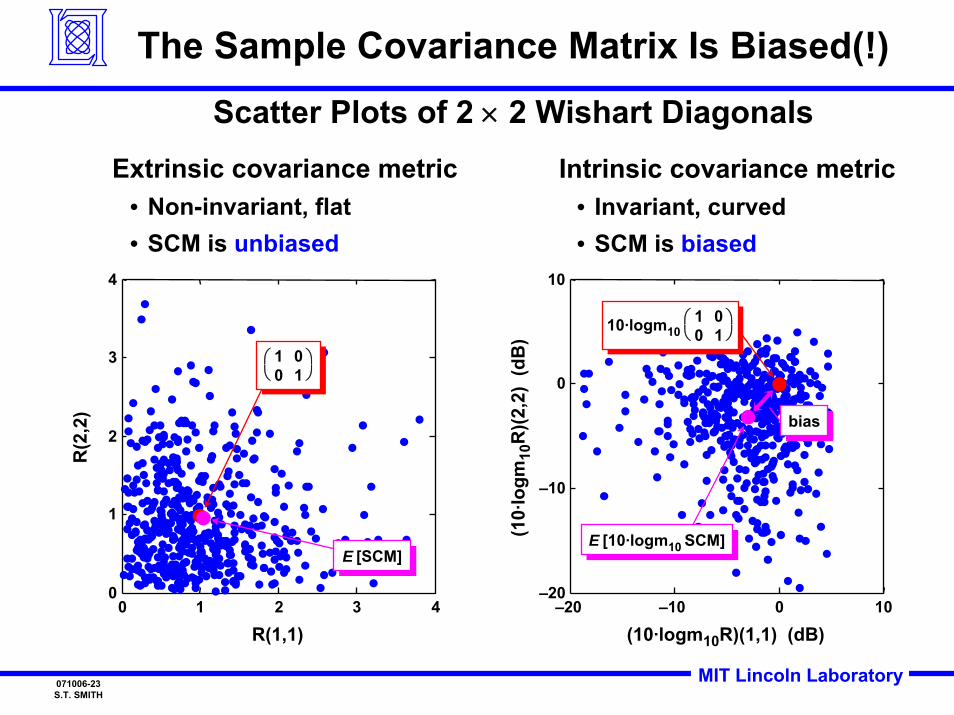
The Sample Covariance Matrix Is Biased(!)
Scatter Plots of 2 × 2 Wishart Diagonals
0 1 2 3 40
1
2
3
4
R(1,1)
R(2
,2)
–20 –10 0 10–20
–10
0
10
(10·logm10R)(1,1) (dB)
(10·
logm
10R
)(2,2
) (d
B)
10
01
⎛⎝
⎞⎠
E [SCM]E [SCM]
10
01
⎛⎝
⎞⎠10·logm10
E [10·logm10 SCM]E [10·logm10 SCM]
Extrinsic covariance metric• Non-invariant, flat• SCM is unbiased
Intrinsic covariance metric• Invariant, curved• SCM is biased
biasbias
MIT Lincoln Laboratory071006-24S.T. SMITH
Covariance matrices flat:
Covariance matrices
R1R2
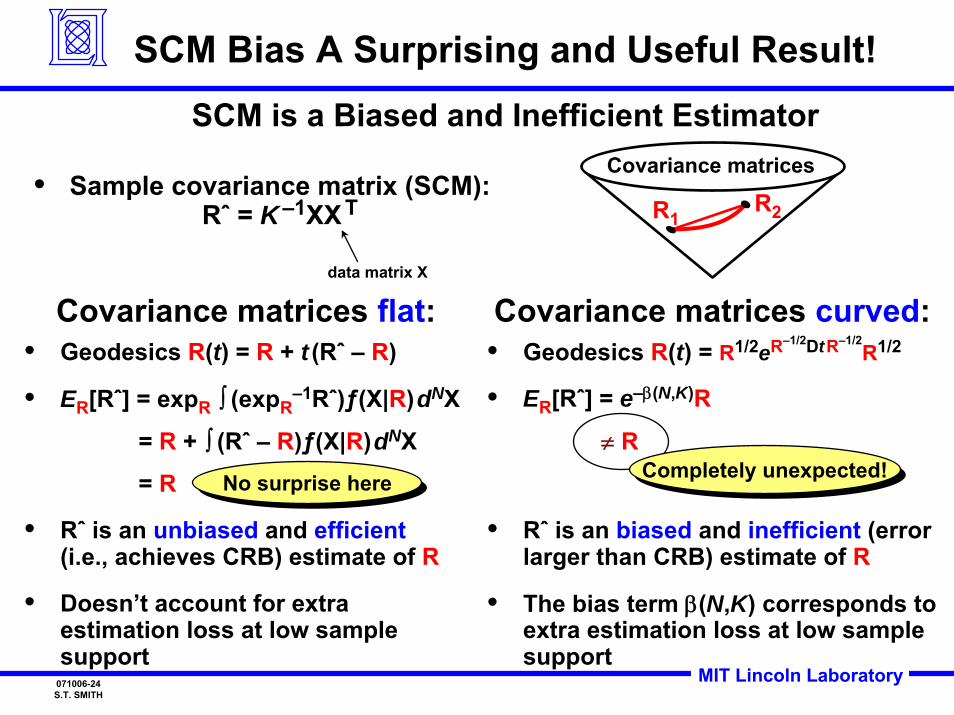
SCM Bias A Surprising and Useful Result!SCM is a Biased and Inefficient Estimator
• Sample covariance matrix (SCM): Rˆ = K–1XX T
data matrix X
• Geodesics R(t) = R + t (Rˆ – R)
• ER[Rˆ] = expR ∫ (expR–1Rˆ)ƒ(X|R)dNX
= R + ∫ (Rˆ – R)ƒ(X|R)dNX
= R
• Rˆ is an unbiased and efficient(i.e., achieves CRB) estimate of R
• Doesn’t account for extra estimation loss at low sample support
No surprise here
• Geodesics R(t) = R1/2eR–1/2DtR–1/2R1/2
• ER[Rˆ] = e–β(N,K)R
≠ R
• Rˆ is an biased and inefficient (error larger than CRB) estimate of R
• The bias term β(N,K) corresponds to extra estimation loss at low sample support
Covariance matrices curved:
No surprise here Completely unexpected!Completely unexpected!
MIT Lincoln Laboratory071006-25S.T. SMITH
1 10
10
Sample support/N
Cov
aria
nce
RM
SE (d
B)
2 5
20
5
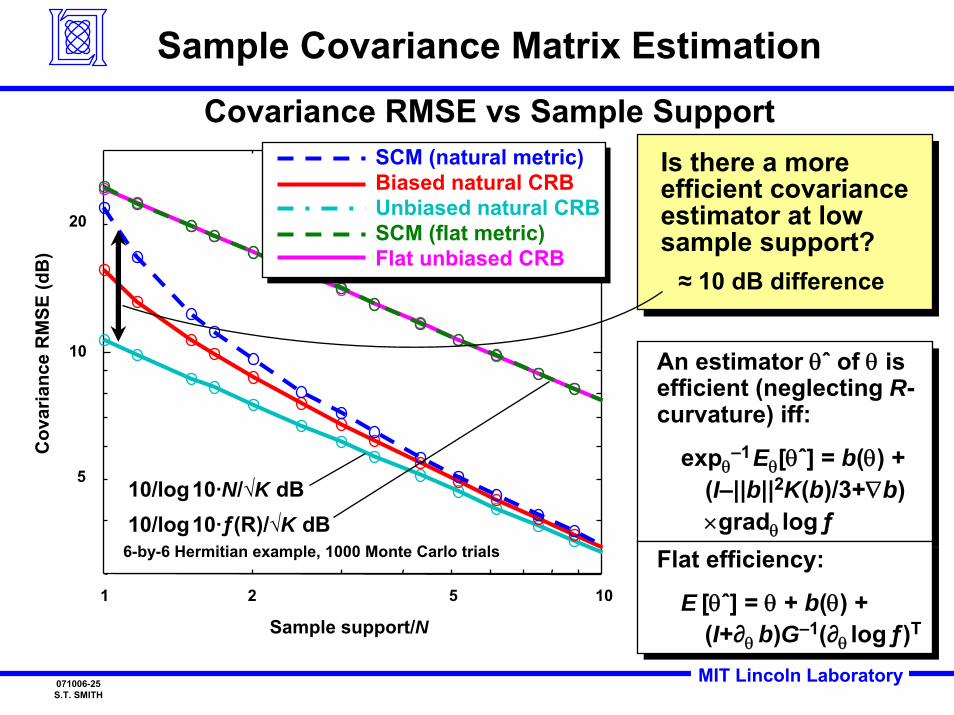
Sample Covariance Matrix EstimationCovariance RMSE vs Sample Support
An estimator θˆ of θ is efficient (neglecting R-curvature) iff:
expθ–1Eθ[θˆ] = b(θ) +
(I–||b||2K(b)/3+∇b) ×gradθ logƒ
An estimator θˆ of θ is efficient (neglecting R-curvature) iff:
expθ–1Eθ[θˆ] = b(θ) +
(I–||b||2K(b)/3+∇b) ×gradθ logƒ
Is there a more efficient covariance estimator at low sample support?≈ 10 dB difference
Is there a more efficient covariance estimator at low sample support?≈ 10 dB difference
SCM (natural metric)Biased natural CRBUnbiased natural CRBSCM (flat metric)Flat unbiased CRB
6-by-6 Hermitian example, 1000 Monte Carlo trials
10/log10·N/√K dB10/log10·ƒ(R)/√K dB
Flat efficiency:
E [θˆ] = θ + b(θ) + (I+∂θ b)G–1(∂θ logƒ)T
Flat efficiency:
E [θˆ] = θ + b(θ) + (I+∂θ b)G–1(∂θ logƒ)T
MIT Lincoln Laboratory071006-26S.T. SMITH
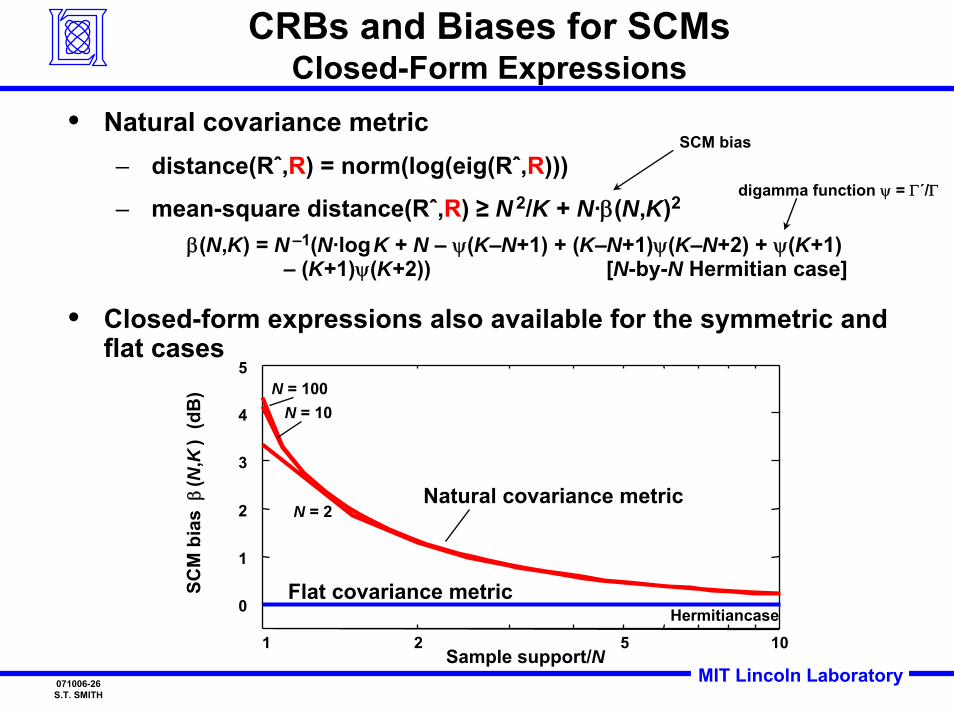
CRBs and Biases for SCMsClosed-Form Expressions
• Natural covariance metric– distance(Rˆ,R) = norm(log(eig(Rˆ,R)))
– mean-square distance(Rˆ,R) ≥ N 2/K + N·β(N,K)2
β(N,K) = N –1(N·logK + N – ψ(K–N+1) + (K–N+1)ψ(K–N+2) + ψ(K+1) – (K+1)ψ(K+2)) [N-by-N Hermitian case]
• Closed-form expressions also available for the symmetric and flat cases
digamma function ψ = Γ´/Γ
SCM bias
0
1
2
3
4
5
SCM
bia
s β
(N,K
) (d
B)
1 10Sample support/N
2 5Hermitiancase
Natural covariance metric
Flat covariance metric
N = 2
N = 100N = 10
MIT Lincoln Laboratory071006-27S.T. SMITH
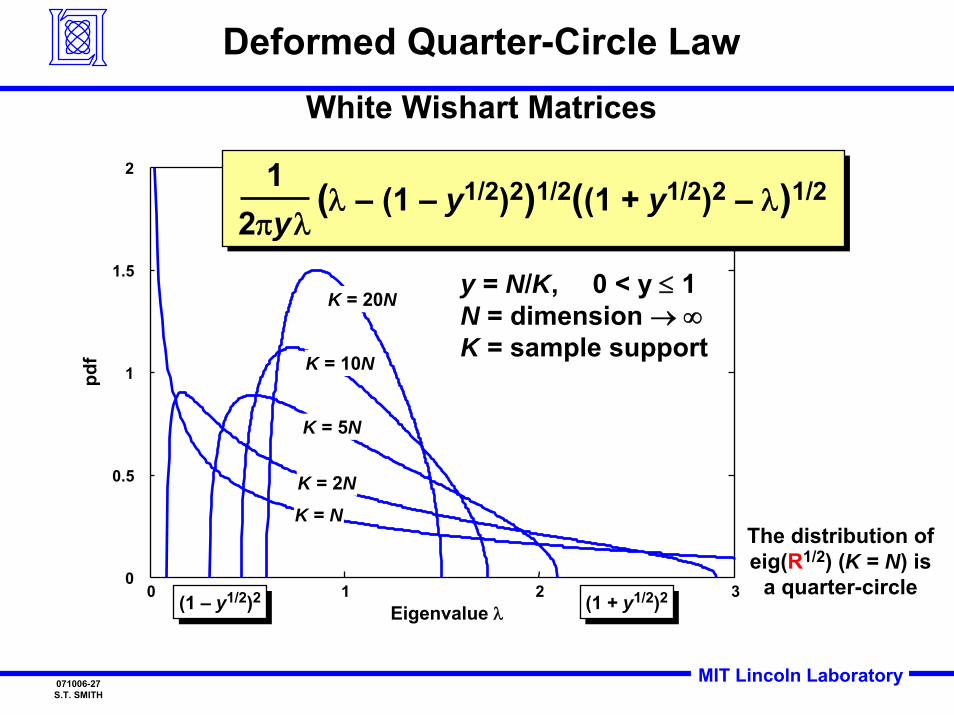
Deformed Quarter-Circle LawWhite Wishart Matrices
The distribution of eig(R1/2) (K = N) is
a quarter-circle0 1 2 30
0.5
1
1.5
2
Eigenvalue λ
12πyλ
(λ – (1 – y1/2)2)1/2((1 + y1/2)2 – λ)1/2
K = NK = 2N
K = 5N
K = 10N
K = 20N
(1 – y1/2)2(1 – y1/2)2 (1 + y1/2)2(1 + y1/2)2
y = N/K, 0 < y ≤ 1N = dimension → ∞K = sample support
MIT Lincoln Laboratory071006-28S.T. SMITH
Summary and Conclusions• Geometric invariance ubiquitous in signal processing
– Geometric properties can be exploited for solutions and insight
• The Cramér-Rao bound with bias is generalized to arbitrary manifolds without intrinsic (prescribed) coordinates– Estimator bias and efficiency depend upon geometry
• Derived formulas bounding covariance estimation accuracy– SCM biased and inefficient from intrinsic perspective
– SCM sample support estimation loss akin to Reed-Mallett-Brennan detection loss
Suggestive of possibility of improved covariance matrix estimators
• Methods very powerful and general– Applicable to orthogonal matrices, orthogonal frames,
subspaces, blind source separation bounds, many others
• Story incomplete—still the Age of Discovery







![Efficient and Accurate Estimation of Lipschitz Constants ...€¦ · Lipschitz regularity can also play a key role in derivation of generalization bounds [6]. In these applications](https://img.pdfslide.us/doc/110x75/60609165b318de384a0c13b5/eficient-and-accurate-estimation-of-lipschitz-constants-lipschitz-regularity.jpg)






![Java Algorithms for Computer Performance Analysis...A Java implementation of Asymptotic Bounds, Balanced Job Bounds and Geometric Bounds (as proposed in [6]), providing bounds on throughput,](https://img.pdfslide.us/doc/110x75/606dab6f274a5313cb504f0b/java-algorithms-for-computer-performance-analysis-a-java-implementation-of-asymptotic.jpg)



![1 On Lower Bounds for Non-Standard Deterministic Estimationwebpages.lss.supelec.fr/perso/renaux/publications/[J24].pdf · of ”standard” deterministic estimation problems for which](https://img.pdfslide.us/doc/110x75/5ea8c082a4703f20092c4f57/1-on-lower-bounds-for-non-standard-deterministic-j24pdf-of-astandarda-deterministic.jpg)