-
International Journal of Non-Linear Mechanics 77 (2015)
312–324
Contents lists available at ScienceDirect
International Journal of Non-Linear Mechanics
http://d0020-74
n CorrE-m
petri.pii
journal homepage: www.elsevier.com/locate/nlm
A hybrid scheme for simulation of planar rigid bodies with
impactsand friction using impact mappings
Shane J. Burns n, Petri T. PiiroinenSchool of Mathematics,
Statistics & Applied Mathematics, National University of
Ireland, Galway, University Road, Galway, Ireland
a r t i c l e i n f o
Article history:Received 3 June 2015Received in revised form3
September 2015Accepted 10 September 2015Available online 21
September 2015
Keywords:Rigid body mechanicsHybrid event driven methodCoulomb
frictionImpactNon-smoothBifurcation
x.doi.org/10.1016/j.ijnonlinmec.2015.09.01162/& 2015
Elsevier Ltd. All rights reserved.
esponding author. Tel.: þ353 91492332.ail addresses:
[email protected] ([email protected] (P.T.
Piiroinen).
a b s t r a c t
This paper introduces numerical techniques necessary for the
implementation of impact maps derivedfrom an energetic impact law
for rigid-body impacts with friction at isolated contact points. In
particularthe work focuses on methodologies for long-term
simulation with behaviours such as dynamic transi-tions and
chatter. The methods are based on hybrid event-driven numerical
solvers for ordinary differ-ential equations together with system
states to deal with the transitions. A slender rod impacting
aperiodically oscillating surface is used as an example to
illustrate implementation and methods. Thenumerical scheme for the
rod system is used to show how symmetry can play an important role
in thepresence of friction for long-term dynamics. This will show
that surface oscillations with low frequenciestend to lead to
periodic motions of the rod that are independent of friction. For
higher frequencieshowever the periodic solutions are not that
common and irregular motion ensues.
& 2015 Elsevier Ltd. All rights reserved.
1. Introduction
Collisions or impacts in mechanical systems are very commonand
in many mechanical engineering applications they can causeundesired
wear and noise and thus be very problematic andexpensive. Two
experimental examples of systems with suchissues include an engine
cam follower [32] and a magnetic bearingsystem [22].
In many applications energy is dissipated during impactsthrough
motion in both the normal and tangential direction(friction) and
how this happens has wide reaching effects on boththe short-term
and long-term dynamics. The understanding of theforces and impulses
that occur at impact, together with an impactlaw, allows for some
prediction of post-impact dynamics ofimpacting systems. By an
impact law we mean a physical law thatis based on theory and
experimentation and used to describe thephysics of a collision
between bodies. Many impact law modelshave been developed, some of
which include friction [7,8,11,21,28,40,18] and some which do not
[9,10]. Impact laws can besplit into two main classes, those
suitable for compliant rigidbodies and those suitable for
non-compliant rigid bodies. The firstclass of impact laws allows
for deformation of the contacting
Burns),
regions of the bodies [5], whereas the second class of impact
lawsrequires perfect rigidity together with some rigidity
constraint [8].
The impact law used in this paper will be for
non-compliantrigid-body impacts with friction. Typically, the main
assumptionsfor non-compliant impacts are: (i) there is no
deformation of thecontact regions, (ii) an impact occurs at an
isolated contact point,(iii) there is no moment impulse during
impact, (iv) the contactduration is infinitesimal, (v) there is no
change in generalisedcoordinates throughout the impact phase and
(vi) the finite activeforces can be neglected during impact
[8,19].
The dynamics of rigid-body systems with impacts and frictionis
usually found by numerical integration of systems of
ordinarydifferential equations (ODEs) corresponding to the
mechanicalsystem under question. There are two main schemes for how
thisis usually done, namely, time-stepping and event-driven
schemes.How to choose one over the other depends on the class or
type ofmechanical system that is being analysed, how the impact law
isresolved, and the type of numerical analysis one would like
toperform. Time-stepping schemes consist of a time discretisation
ofthe dynamics in which each time step is advanced by solving
anappropriate complementarity problem [1]. In these schemes
themoment of each collision or when changes in relative
velocitybetween bodies occurs is not exactly located but instead
somelevel of penetration can occur. This is the price to pay for
usingrigidly formulated time-stepping methods. These schemes
arehowever very advantageous for the simulation of systems with
alarge number of degrees of freedom with multiple contacts, for
www.sciencedirect.com/science/journal/00207462www.elsevier.com/locate/nlmhttp://dx.doi.org/10.1016/j.ijnonlinmec.2015.09.011http://dx.doi.org/10.1016/j.ijnonlinmec.2015.09.011http://dx.doi.org/10.1016/j.ijnonlinmec.2015.09.011http://crossmark.crossref.org/dialog/?doi=10.1016/j.ijnonlinmec.2015.09.011&domain=pdfhttp://crossmark.crossref.org/dialog/?doi=10.1016/j.ijnonlinmec.2015.09.011&domain=pdfhttp://crossmark.crossref.org/dialog/?doi=10.1016/j.ijnonlinmec.2015.09.011&domain=pdfmailto:[email protected]:[email protected]://dx.doi.org/10.1016/j.ijnonlinmec.2015.09.011
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 313
example flows in a granular material or masonry
structures.Event-driven schemes are also basically time-stepping
schemesbut the time for which a trajectory reaches a constraint or
dis-continuity surface is located as precisely as possible to
avoidpenetration. This class of schemes can in turn be divided into
twoseparate categories, the complementarity methods and the
hybridmethods. As the name suggests, in the complementarity method
acomplementarity problem is solved as the event is
located,whereafter the standard time-stepping scheme continues as
dis-cussed above [1].
In the hybrid methods, which are the focus of this paper,
theintegration is terminated when an event is located and a
discretemap is applied to describe how the state changes at the
event.When the map is applied the time-stepping scheme is
restartedwith the post-event states as the initial conditions with
a new setof ODEs that reflect the new circumstance. Hybrid methods
havesome obvious drawbacks but also some very important
advantagesthat we will use in this paper. The main complication of
hybridmethods is that, since each event has to be identified and
resolvedindividually, the complexity of all different combinations
of eventsand ODEs grows very quickly with the number of possible
events.Another complication is that for each event a mapping has to
befound that reflects, in the case of this paper, what the impact
lawdictates. These issues make hybrid schemes only feasible for
sys-tems with relatively few different discontinuity surfaces
[2,35,36].However, on the positive side it is worth raising at
least four dif-ferent points. First, since the events are not
included in the timestepping only ODEs with smooth dynamics have to
be integratedand it is thus possible to use a suitable high-order
integrator withwell-known convergence properties so that
trajectories can befound with high accuracy. Second, since no
events will be lostduring simulation hybrid methods are useful for
the brute-forcebifurcation analysis and in particular when
discontinuity-inducedbifurcations (DIBs) are involved. An example
of a DIB, and some-thing that will be seen in this paper, is a
grazing bifurcation. Agrazing bifurcation occurs when, under
parameter variation, atrajectory of a periodic orbit makes
tangential contact with thediscontinuity surface, resulting in a
change in the system dynamics[30,15]. Third, hybrid methods make
the stability analysis of per-iodic orbits relatively straight
forward since it is possible to cal-culate saltation matrices that
“glue” fundamental solution matricestogether for trajectories
passing through regions between differentevents. Fourth, despite
the common misconception, there aremethods born out of hybrid
schemes for impacting systems thatcan deal with the accumulation of
impacts, sometimes referred toas chatter or Zeno behaviour, and
also calculate the correspondingsaltation matrices [31]. As
mentioned above, event-drivenschemes are particularly useful for
systems with relatively fewdegrees of freedom, but with multiple
spatially and temporallyseparated contact points. Some examples
include turbine bladedampers, friction clutch vibrations, landing
gear dynamics [33],passive walkers [2,34] and braille printers
[13].
The use of non-smooth system theory to predict and under-stand
the kinematics of colliding rigid bodies in the presence ofimpact
and friction is a useful commodity in engineering in par-ticular
and research of such systems in general [6,16,22,25,33,37].It is
well known that non-smooth systems can exhibit complexbehaviour
that cannot be found in smooth systems. The class ofsystems with
combinations of ODEs and maps, that we use herefor mechanical
systems with impact and/or friction, are oftentermed as
piecewise-smooth (PWS) systems. In recent years theinterest of DIBs
found in PWS systems has increased dramatically,and as mentioned
above the main driver of the analysis of DIBs hasbeen the hybrid
system approach, where local behaviour cannumerically be pinpointed
with high accuracy [3,12,15,30,31]. Inparticular DIBs in impacting
systems without friction have been
studied extensively and some classification methodologies
havebeen developed in [14,27,24], but also impacting systems
withfriction have been studied from a DIB point of view [23,17,28].
Asalready mentioned, a type of behaviour that is very specific
toimpacting systems with rigid body impacts is chatter, which is
thephenomenon whereby a system goes through an infinite numberof
impacts in a finite time period. Previous works on chatter
haveconsidered both frictionless systems [9,12,31] and systems
withimpacts and friction [23,28,29]. An interesting example of
anengineering-based frictionless system is analysed in [26],
wherethe problem of gear rattle (chatter) in Roots blower
vacuumpumps is considered, and where the rattle is induced from
thegear teeth losing and regaining contact. Similarly, in
cam-followersystems for certain conditions the follower detaches
from the cam,resulting in a series of unwanted impacts or chatter
[3,4,32].
With this in mind, the emphasis of this paper is two-fold.
First,we will show how the impact mappings for impacts with
frictionderived in [28] can be implemented for reliable simulations
ofsystems with impacts and friction. Second, we want to exploit
thefact that we have reliable simulation routines to analyse the
long-term qualitative behaviour of an unconstrained mechanical
systemwith impacts and friction. Since previous research has
mainlyconsidered long-term dynamics for systems with impacts
butwithout friction [3,14,31] the analysis of the unconstrained
objectwill show that it is feasible to also consider long-term
simulationsfor mechanical system with impact and friction. For this
purposewe chose a hybrid event-driven technique as opposed to a
time-stepping method in order to resolve DIBs in brute-force
bifurcationanalysis as well as deal with accumulation of events
(chatter). Wewill use the example of a planar slender rod impacting
with anoscillating surface to show how to implement these
techniques.This can be seen as a generalisation of a system where a
machineelement detaches and is free to vibrate in the presence of
frictionor an item that lies on a vibrating conveyor belt. We will
show howrattle is affected by the presence of friction.
This paper is organised as follows. The equations of motion fora
collision between two rigid bodies with an isolated contact
pointare derived in Section 2.2 along with an extension of the
energeticimpact law derived in [28] to allow for a two-body
collision. Sec-tion 3 summarises the numerical methods necessary
for theimplementation of the chosen impact law. In Section 3.1 we
willintroduce the notion of system states and how this idea is used
inthe simulation of impacting systems. The model example of
aslender rod impacting a periodically oscillating surface is
intro-duced in Section 4 and the basic setup that is used in
thenumerical simulations is presented in Section 4.1. The
paperconcludes with a discussion in Section 5 that provides an
insightfor engineers and other researchers working with impact
andfriction.
2. Planar rigid-body impacts with friction
In this section we will derive a general framework for a
planarrigid-body collision between two unconstrained objects. We
willpresent an extension of the energetic impact mapping derived
in[28], which will be used for the model example in Section 4.
Theextension derived here is more general than the mapping
pre-sented in [28] in that the mapping in [28] is for the specific
case ofa slender rod impacting a stationary non-compliant surface,
butwhere we allow both bodies to be unconstrained.
2.1. Equations of motion
Consider two planar rigid bodies H and H0 whose
configurationrelative to an inertial reference frame can be
described in terms of
-
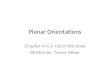
Fig. 1. (a) A free-body force diagram for two planar bodies in
free flight. (b) Geometry of two planar rigid bodies H and H0 in
contact at a point C. (c) A free-body forcediagram corresponding to
the figure in (b). (d) A schematic showing the angle of rotation β
between the two frames used for modelling and analysis.
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324314
vectors of generalised coordinates. Further impose that the
bodiesat any moment have a finite number of isolated contact points
andcontact cannot occur at two separate points simultaneously.
Forthis purpose we derive the equations of motion for two
separatecases, when the bodies are in free flight, see Fig. 1(a),
and whenthey are in contact at an isolated point C, see Fig. 1(b)
and (c). Thecorresponding dynamics can be described using a
Lagrangianformulation or using a Newtonian formulation. In Sections
2.1.1and 2.1.2 we consider a Newtonian formulation.
2.1.1. Free flightConsider the two bodies H and H0 in free
flight as shown in
Fig. 1(a). The position and rotation of the centre of mass G of
bodyH can be described in the X�Y plane by the coordinates qX and
qYand the angle α, and similarly q0X and q
0Y are the coordinates and α
0
the rotation of the centre of mass G0 of body H0 (see Fig.
1(a)). Nextwe let
r¼ ðqX ; qY ;αÞT ; r0 ¼ ðq0X ; q0Y ;α0ÞT ;_r ¼ ð _qX ; _qY ;
_αÞT ; _r 0 ¼ ð _q 0X ; _q 0Y ; _α 0ÞT ;€r ¼ ð €qX ; €qY ; €αÞT and
€r 0 ¼ ð €q 0X ; €r 0Y ; €α 0ÞT :
The equations of motion for the two bodies can now be written
as
M €r ¼ FT and M0 €r 0 ¼ F 0T ; ð1Þwhere M and M0 are,
respectively, the mass matrices for H and H0
given by
M¼m 0 00 m 00 0 I
0B@
1CA and M0 ¼
m0 0 00 m0 00 0 I0
0B@
1CA;
and F and F 0 are, respectively, the external forces and
torquesacting on H and H0 given by
F ¼ FX ; FY ;Rð Þ and F 0 ¼ F 0X ; F 0Y ;R0� �
:
Herem andm0 are the masses and I and I0 are the moments of
inertiaof H and H0 , respectively. Further FX, F
0X and FY, F
0Y represent the force
components in the X�Y plane and R and R0 are the external
torquesacting on H and H0, respectively, as shown in Fig. 1(a).
2.1.2. ContactNext we derive the equations of motion for the
system when
the two objects are in contact, as shown in Fig. 1(b) and (c).
To dothis we define a new coordinate system n1�n2, rotated by
anangle β about the origin relative to the coordinate system X�Y
,where n1 is the tangential vector to the contact plane and n2 is
thenormal vector to the contact plane (see Fig. 1(d)). We also
define
θ¼ α�β and θ0 ¼ α0 �β and letq¼ ðq1; q2;θÞT ¼ qX cos ðβÞ�qY sin
ðβÞ; qX sin ðβÞþqY cos ðβÞ;α�β
� �T;
and
q0 ¼ ðq01; q02;θ0ÞT ¼ q0X cos ðβÞ�q0Y sin ðβÞ; q0X sin ðβÞþq0Y
cos ðβÞ;α0 �β� �T
:
Further, defining L as the distance from G to C and L0 as the
dis-tance from G0 to C, the positions qC and q0C of the contact
point Crelative to both bodies in the n1�n2 frame can be written
as
qC≔ q1�L cos ðθÞ; q2�L sin ðθÞ� �T ð2Þ
and
q0C≔ q01�L0 cos ðθ0Þ; q02�L0 sin ðθ0Þ
� �T: ð3Þ
Note that we do not deal with the problem of finding the
contactpoints in the general case but assume that there are
well-definedcontact points on each object. Let d¼ qC�q0C be the
relative dis-tance between the contact points of the two bodies.
Then theunilateral constraint between the two bodies is d¼ ð0;0ÞT
orequivalently when qC ¼ q0C .
This is a useful framework to work with, particularly
whenderiving an impact mapping. It is also straightforward to
translateback positions and angles to the original X�Y coordinate
system.The derivation of the impact mapping introduced in [28]
splitscontact forces into tangential and normal components in
relationto the contact plane, i.e. using the n1�n2 coordinate
system. Inorder to relate how the contact forces will affect the
centre of massin terms of translations and rotations we need to
consider
∂qC∂q
¼1 0 L sin ðθÞ0 1 �L cos ðθÞ
!and
∂qC∂q0
¼ 1 0 L0 sin ðθ0Þ
0 1 �L0 cos ðθ0Þ
!:
Now, the equations of motion for H and H0 during contact
can,respectively, be written as
M €q ¼ F̂ T þ ∂qC∂q
� �TλT ð4Þ
and
M0 €q 0 ¼ F̂0Tþ ∂qC
∂q0
� �Tλ
0T; ð5Þ
where F̂ and F̂0are, respectively, the external forces and
torques
acting on H and H0 given by
F̂ ¼ F1; F2;Rð Þ ¼ FX cos ðβÞ�FY sin ðβÞ; FX sin ðβÞþFY cos
ðβÞ;R� �
;
and
F̂0 ¼ F 01; F 02;R0� �¼ F 0X cos ðβÞ�F 0Y sin ðβÞ; F 0X sin
ðβÞþF 0Y cos ðβÞ;R0� �;
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 315
where the subscripts 1 and 2, respectively, represent the
compo-nents of the external forces acting in the tangential and
normaldirection, and R and R0 are as above the external torques
acting onthe bodies as shown in Fig. 1(c). In a similar way we
define λ and λ0
as the forces generated at impact of each body given by
λ¼ λ1; λ2� �
and λ0 ¼ �λ1; �λ2� �
:
This setup is general and does not specify the mechanism
thatgenerates the tangential force λ1. For this work however
weassume that any tangential force arises due to friction at
thecontact point of the colliding bodies and here we use the
Amon-tons–Coulomb friction law
λ1 ¼ 7μλ2 ð6Þfor some non-negative constant μ representing a
coefficient offriction. The sign assigned to the tangential force
λ1 is positive ðþÞwhen the relative tangential contact point
velocity between thetwo bodies is negative and it is negative ð�Þ
when the relativetangential contact point velocity is positive.
2.2. Energetic impact law
For collisions between rigid bodies, dissipation of energy in
thedirection normal to the contact plane is modelled using a
coeffi-cient of restitution. A coefficient of restitution gives a
relationbetween the normal impulse applied during the restitution
phaseto that applied during compression. Typically a Newtonian
coef-ficient or a kinematic coefficient is used for this purpose
[38],however, for situations where the direction of slip can
varythroughout the impact phase both these coefficients will
violateenergy conservation [39]. Stronge [38] views the impact
phase asbeing composed of a compression phase followed by a
restitutionphase. During compression, kinetic energy is stored as
internaldeformation energy until the normal relative contact point
velo-city is brought to zero. At this point the restitution phase
beginsand the stored energy is released.
For this purpose Stronge defines an energetic coefficient
ofrestitution en as follows:
Definition 1. The square of the coefficient of restitution is
thenegative ratio of the elastic strain energy released during
restitu-tion to the internal energy of deformation absorbed during
com-pression,
e2n¼ �WðPf Þ�WðPcÞ
WðPcÞ;
where W ¼ R t0 Fv dt0 and for a significantly short contact
durationthe force can be related to the differential of impulse, dP
¼ F dt0 sothat
e2n¼ �
R PfPc
vðPÞ dPR Pc0 vðPÞ dP
; ð7Þ
where P is the impulse, v(P) is the relative normal velocity, Pc
¼R tc0 λN dt is the normal impulse for compression, with tc the
timetaken for the contact point velocity to reach zero, λN the
normalcomponent of the contact force and Pf is the final impulse
achievedat separation.
This energetic restitution coefficient allows for the
variousstick-slip processes that can occur throughout the impact
phaseand thus is a restitution coefficient that will not violate
energyconservation. It is notable that the kinematic and
Newtoniancoefficients do not allow for situations where the
direction of slipcan vary throughout the impact phase, and the
consequence ofthis is that the final impulse is not calculated
correctly. Further, theenergetic restitution coefficient forms the
basis for the impact
mapping derived in [28], a brief description of which will be
givenbelow. When we refer to the impact phase we are
consideringvelocity changes which occur as a function of normal
impulse. Thisimpulse formulation is a natural framework to use
given that weassume that the impact is of infinitesimal contact
duration.
In order to map pre-impact velocities to post-impact ones it
isnecessary to consider the terminal impulse Pf for the given
colli-sion. Incorporating Amontons–Coulomb friction law (6) and
theenergetic restitution coefficient (7) allows for a variety of
stick-slipprocesses, each of which need to be considered and the
corre-sponding Pf in each case determined. We will consider the
equa-tions of motion for a planar two-body collision. It is
necessary toconsider velocity changes as a function of normal
impulse Pinstead of the time variable t. Consider (4) translated to
the contactpoint qC so that
d _qCdt
¼ ∂qC∂q
€q ¼ ∂qC∂q
M�1∂qC∂q
� �TλT þ∂qC
∂qM�1FT ¼w�1λT þ f ðF1; F2;R; q; _qÞ
ð8Þand
d _qCdt
¼ ∂qC∂q0
€q ¼ ∂qC∂q0
ðM0Þ�1 ∂qC∂q0
� �Tλ
0T þ∂qC∂q0
ðM0Þ�1F 0T
¼ w0ð Þ�1λ0T þ f 0ðF 01; F 02;R0; q0; _q 0Þ; ð9Þwhich is the
rate of change of the contact point velocities as afunction of time
and where w�1 and w0ð Þ�1 are the symmetricmatrices given by
w�1 ¼ ∂qC∂q
M�1∂qC∂q
� �T¼ A B
B C
� �;
w0ð Þ�1 ¼ ∂qC∂q0
ðM0Þ�1 ∂qC∂q0
� �T¼ A
0 B0
B0 C 0
!;
where
A¼ 1mþL
2 sin 2ðθÞI
; B¼ � sin ðθÞ cos ðθÞI
; C ¼ 1mþL
2 cos 2ðθÞI
A0 ¼ 1m0
þL02 sin 2ðθ0Þ
I0; B0 ¼ � sin ðθ
0Þ cos ðθ0ÞI0
; C0 ¼ 1m0
þL02 cos 2ðθ0Þ
I0:
In this context we do not need to consider terms which do
notchange throughout the impact phase and therefore we can
neglectthe functions f and f 0. Further, during the impact phase we
alsohave that
dPdt
¼ λ2 ð10Þ
for H and by Newton's third law of motion
dð�PÞdt
¼ �λ2 ð11Þ
for H0, since the normal impulse is a uniformly increasing
scalarfunction during contact. Now, (8), (10) and (11) allow us to
replacethe independent variable t with P in (10) and (11) to
give
d _qCdP
¼ 1λ2w�1
λ1λ2
!; ð12Þ
which is the rate of change of contact point velocities with
respectto H as a function of normal impulse. In a similar way,
using (9),(10) and (11), we also have
d _q 0CdP
¼ 1λ2
w0ð Þ�1�λ1�λ2
!: ð13Þ
Subtracting (13) from (12) yields
d _~qCdP
≔d _qCdP
�d _q0C
dP¼ 1λ2
w�1þ w0ð Þ�1� � λ1
λ2
!; ð14Þ
-
Fig. 2. A schematic detailing the time history of a contact
point p(t) in an impactingsystem.
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324316
or in the notation of [28]
d _~qCdP
¼ 1λ2
 � B̂� B̂ Ĉ
!λ1λ2
!; ð15Þ
which is the relative change in contact point velocities as a
func-tion of normal impulse. Expanding Eq. (15) and writing it in
termsof tangential and normal components, respectively, give
d _~q1CdP
¼ Âλ1λ2
� B̂; d_~q2CdP
¼ � B̂λ1λ2
þ Ĉ ; ð16Þ
which will be used to define the rate constants used for the
impactmappings presented below.
Stronge [38] describes four possible impact-phase processesand
calculates the terminal impulse and the post-impact
velocitycomponents for each phase. The four phases are:
Unidirectional slip during contact: In this case slip does not
ceasethroughout the impact phase, and the tangential forcingacts in
a direction opposite to the motion of the body.
Slip reversal during compression: In this situation initial
sliding isbrought to rest and then reverses direction.
Slip-stick transition during compression: The case whereby
initialsliding is brought to rest. The contact point sticks if
thefriction coefficient μ is sufficiently large or undergoesreverse
slip if it is not. It is also required that the initialsliding
velocity is sufficiently small, otherwise thismotion cannot
occur.
Jam: This is the process whereby there is an increase in nor-mal
acceleration at the contact point due to a largerotational
acceleration. This motion occurs during aninitial period of
sliding.
Nordmark et al. [28] extend this theory by describing 10
dif-ferent impact regions from which an impact law consisting
ofthree mappings is derived. The impact mappings in [28] map
therelative tangential and normal contact point velocities before
theimpact phase _~q �C to the post-impact phase velocities
_~q þC . Using Eq.(16) and following [28] we define the rate
constants kþT , k
�T , k
þN ,
k�N , kT0 and kN0. These rate constants describe how stick
and
positive and negative slip can occur throughout the
compressionand restitution phase. For the various stick-slip
processes descri-bed above Nordmark et al. [28] define the rate
constants
kþT ¼ � B̂�μÂ; kþN ¼ ĈþμB̂;k�T ¼ � B̂þμÂ; k�N ¼ Ĉ�μB̂;
k0T ¼ 0; k0N ¼ÂĈ� B̂2
Â;
from which
kT ¼kþT in positive slip;k�T in negative slip;
k0T in stick;
8>><>>: ð17Þ
and
kN ¼kþN in positive slip;k�N in negative slip;
k0N in stick;
8>><>>: ð18Þ
can be determined, where μ¼ λ1λ2
. It is worth mentioning that μ is
taken as an absolute here and the rate constants described
aboveconsider all cases of positive and negative slip so it is not
necessaryto assign a sign to μ. Nordmark et al. [28] also define
the constantsk0T and k
0N , which are assigned one of the values of k
þT , k
�T , k
þN , k
�N ,
kT0 and kN0, and determined by the system parameters and
pre-collision conditions. For full details we refer to [28].
From thisand using Eq. (7) the following three maps, for pre-impact
to post-impact contact point velocities _~q �C ↦
_~q þC can be derived:
Map I:
_~q þ1C ¼ _~q �1C� 1þenð ÞkTkN
_~q �2C ð19Þ
_~q þ2C ¼ �en _~q �2C ð20ÞMap II:
_~q þ1C ¼k0Tk0N
kNkT
_~q �1C� _~q
�2Cþffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�k
0N
kN
� ��kNkT
_~q �1C� _~q �2C�2
þe2n
k0NkN
�_~q �2C�2s 1A
0@
ð21Þ
_~q þ2C
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1�k
0N
kN
� ��kNkT
_~q �1C� _~q �2C�2
þe2n
k0NkN
�_~q �2C
�2sð22Þ
Map III:
_~q þ1C ¼k0Tk0N
kNkT
_~q �1C� _~q �2Cþen
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�1�k
0N
kN
��kNkT
_~q �1C� _~q �2C�2
þe2n
k0NkN
�_~q �2C�2s 1A
0@
ð23Þ
_~q þ2C ¼ en
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�1�k
0N
kN
��kNkT
_~q �1C� _~q �2C�2
þk0N
kN
�_~q �2C�2s
ð24Þ
for kNa0 and
_~q þ1C ¼ 0 ð25Þ
_~q þ2C ¼ en
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�_~q
�2C�2
þ2k0N _~q �1C_~q �2CkT
sð26Þ
for kN¼0.As mentioned above, the different combinations of
segments of
stick and relative slip can be described by ten different
regions,each of which corresponds to one of the three maps given
above. Itis worth noting that in [40] an equivalent energetic
coefficient ofrestitution is used together with the
Amontons–Coulomb frictionlaw to describe the contact and impact
dynamics for the case of abouncing dimer.
2.3. Dynamics
As the type of mechanical system considered for this work
isunconstrained away from the discontinuity surfaces, various
pos-sible modes of sustained motion can occur. To highlight this,
inFig. 2 we consider a schematic of the time history of a point
p(t) on
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 317
a rigid body that occasionally acts as a contact point
duringimpacts with a non-compliant surface. We only need to
definethree modes of motion, namely, unconstrained free flight,
chatterand stick. For our purposes, unconstrained free flight
coulddescribe, for example, the motion of a projectile that is free
torotate about all axes and is entirely unconstrained. Note
thatconstrained free flight could describe, for example, the motion
of adouble pendulum. The system is constrained to move in a
planewith two degrees of freedom due to the upper arm of the
pen-dulum being constrained to a fixed point. It is also necessary
todistinguish between two types of chatter, namely, complete
andincomplete chatter [31]. Complete chatter is where an
objectundergoes an infinite number of impacts in finite time and
even-tually transitions to stick. This motion can be observed in
realitywhere a bouncing a ball, for example, undergoes a large
number ofimpacts and eventually comes to a stop and transitions
into a stickstate. Incomplete chatter is where the system undergoes
a largenumber of impacts in a short time frame but transitions to
freeflight due to a change in the relative acceleration.
At an impact, after free flight, a system can evolve in a
numberof different ways: it can continue in free flight motion, go
into astick regime or go through a chatter sequence. A feature
which isalso present in the schematic Fig. 2 is an external impact,
whereanother point of the rigid-body system impacts and thus causes
achange in the dynamics of the point p(t). For analysis purposes it
isimportant to be able to distinguish between the different
featuresand subtle changes in order to understand the mechanisms
thatcause them. There are typically also a number of
system-specificlong-term dynamical behaviours present. In Sections
4.1 and 4.3we discuss such examples for the case of a slender rod
impactingan oscillating surface.
3. Numerical methods
In this section we will give a very brief description of the
dif-ferent numerical methods employed for simulation of the
rigid-body system with impacts and friction described in Section 4.
Wemainly follow the methodologies described in [31,36] with
someextensions and some simplifications, as we will describe
below.The methodology we use here is, as mentioned in Section
1,sometimes referred to as the hybrid or event-driven
approach,where continuous dynamics, described by a system of
smoothODEs, is combined with discrete events, described by maps.
Themaps are used when a solution trajectory reaches an event
surfacedefined by the system variables and parameters. In this
context weconsider the continuous dynamics as the motion between
theimpacts or other transitions and the maps correspond to the
actualimpacts or transitions. The transitions are typically changes
fromfree-flight dynamics to stick or to chatter.
To solve a system of smooth ODEs in Section 4 we mainly usethe
MATLAB's ODE solver vert ode45vertand to locate the eventsurfaces
we use MATLAB's built-in event-detection routines. How-ever, the
methodology described here can equally well be imple-mented in any
environment that has an ODE solver and eventlocation capabilities.
The ODE solver requires at least two vectorfields (one for the
free-flight phase and one for stick, but seefurther Section 4 for a
specific implementation), simulation times,initial conditions,
error tolerances and integration step sizes. Inorder to accurately
locate the event surfaces, event functions needto be described that
are derived from the geometries of theimpacting rigid bodies.
Finally, impact maps, like those describedin Section 2.2 have to be
defined together with a process thatdetermines what impact map to
use for the specific impact.
In general, when dealing with rigid bodies, it is more
thanlikely that the overall system can have multiple contact points
and
a large number of events can occur (impacts or vector field
tran-sitions). These two factors can generally give rise to a
number ofcomputational complications, making the analysis of
long-termdynamics difficult. One such useful example is to define
an addi-tional artificial term on the vector fields that makes the
surfacelocally attractive when the system is in stick. This ensures
that thecontact point does not drift away from the surface due
tonumerical errors. A similar approach was used in [36] for
Filippovsystems.
Following the setup of system states presented in [36,31] wecan
achieve a robust numerical code capable of simulating thesystem to
examine long-term dynamics. By robust we mean, usingthis method,
the numerical simulator is capable of handling theevents and
transitions which can occur, without breaking down.This is
presented in Section 3.1, followed by a discussion in Section3.2 on
brute-force bifurcation analysis in general and stabilityanalysis
of symmetric period-1 solutions.
3.1. System states
One of the many difficulties associated with using a
hybridstrategy for finding the solution to a dynamical system with
dis-continuities is the accumulation of events, for instance when
anincomplete or a complete chattering sequence is encountered
(seeSection 2.3 and [4]). To deal with this in a systematic manner
it isadvantageous to introduce the notion of system states in a
similarway as was done in [36,31]. For a general system we can
define ndiscrete states Sn in which one of the defined vector
fields Φn isbeing used. Each vector field Φn either corresponds to
free-flightor sticking motion, which has to be defined by the user.
A transi-tion diagram can be used to decide if a system should
transitionfrom one state to another at an event, and also provides
a meansfor numerically dealing with a complete chatter
sequence.
The number of free-flight and stick states depends mainly onthe
geometry of the impacting rigid bodies. This point will
beillustrated further in Section 4.2 for a model example showing
aslender rod impacting an oscillating plane.
The mechanism for switching between the states Sn at
impactinvolves evaluating relative normal contact point
accelerationsand velocities, whereafter a transition diagram
together with adecision tree can be used to evaluate what state the
system shouldbe in after the impact. The contact point velocities
are mainly usedto calculate post-impact velocities. This is in
contrast to the con-tact point accelerations that are used to
determine when thesystem should release from stick to free flight.
The specificimplementations have to be assessed on a case-by-case
basis.
3.2. Bifurcation diagrams and stability analysis
A common way in which to make an initial assessment of
thelong-term dynamics of a mechanical system is to plot
brute-forcebifurcation diagrams. In Section 4.3 we highlight some
aspects ofhow the long-term dynamics of a mechanical system with
impactsis affected by friction through bifurcation diagrams. The
bifurca-tion diagrams shown in Section 4.3 are made up of, on the
onehand, period-1 solutions found by a semi-analytic
continuationmethod based on a shooting method and, on the other
hand, otherrecurrent motions found by brute-force simulation
methods. Forthe period-1 solutions the stabilities are found by
calculating theeigenvalues of the fundamental solution matrix that
is found bysolving the variational equations of the
piecewise-smooth system.For this purpose saltation matrices are
used to merge togetherfundamental solution matrices for
trajectories that switch fromone state to another. These methods
have successfully beenimplemented in [2,13,34] and particularly in
[31] which reports
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324318
the stability analysis for impacting systems without friction
butwith complete chatter.
4. Dynamics of a slender rod impacting a periodically
oscil-lating surface
In this section we will use a basic planar model of a
rigidslender rod impacting a periodically oscillating surface to
illustratethe techniques discussed in Section 2. The model will
also be usedto describe how the numerical methods discussed in
Section 3 canbe implemented and what the dynamical features
presented inSection 2.3 look like for this specific case. We will
also use thissetup to show how friction affects chaotic rattling
behaviour ofthe rod.
4.1. The model, system states and vector fields
As discussed above we consider a planar uniform slender rigidrod
and let q1, q2 be the tangential and normal position of thecentre
of mass, relative to the contact plane, and let θ be the angleof
rotation of the rod (see Fig. 3(a)). For this model example
thetangential and normal directions correspond to the n1 and
n2directions, respectively, as discussed in Section 2 and shown
inFig. 1. The rod is subjected to gravity and where either of the
twoisolated end points, named P1 and P2, can impact, get stuck to
orslide along the periodically oscillating surface. The slender rod
canessentially be in four different states: free flight (Fig.
3(a)), one ofthe two end points is stuck to the surface (Fig. 3(b)
and (c)), orboth end points are stuck to the surface (Fig. 3(d)).
The fourth statehere also allows for the release of the two end
points at the sametime, which in effect leads to a
lower-dimensional dynamicalsystem that can be treated as a simple
impacting particle.
Without loss of generality and following the general setup
inSection 2, we let the mass of the rod be m¼1 and the distancefrom
the centre of mass to either of the two end points be L¼1.This
gives the moment of inertia I¼ 13 and the radius of gyrationk2r ¼
13. We further assume that the vertically oscillating surface isnot
affected by the rod at impact and thus let D(t) represent
theoscillating surface with frequency ω, amplitude A and where t
istime, so that DðtÞ≔A sin ðωtÞ (see Fig. 3). This means that we
onlyneed to consider one of the two impacting bodies introduced
inSection 2.1.1 as the mass of the surface can be assumed to be
muchgreater than that of the rod and thus only one of the two
systemsof differential equations, say Eq. (4), needs to be
considered. Forfuture reference we let q4 ¼ _q1; q5 ¼ _q2; q6 ¼ _θ
and introduce τ asthe phase of the oscillating floor. We also let
d1 be the distancebetween the end point P1 and the surface in the
normal directionand let d2 be the distance between the end point P2
and the sur-face in the normal direction. The unilateral
constraints for thismodel example are thus d1 ¼ 0 (see Fig. 3(b)),
or d2 ¼ 0 (see Fig. 3(c)) or simultaneously d1; d2 ¼ 0 (see Fig.
3(d)). Further, usingEq. (2) we find
d1 ¼ q2� sin ðθÞ�A sin ðωtÞ;d2 ¼ q2þ sin ðθÞ�A sin ðωtÞ;
ð27Þ
Fig. 3. The four possible main states of the slender rod. (a)
Free-flight motion. (b) En(d) Symmetric free-flight motion (dashed)
and symmetric stick motion (solid).
from which we obtain the relative velocity between the end
pointP1 and the floor as
_d1 ¼ _q2� cos ðθÞ _θ�Aω cos ðωtÞ; ð28Þand the relative velocity
between the end point P2 and the floor as
_d2 ¼ _q2þ cos ðθÞ _θ�Aω cos ðωtÞ;the relative acceleration
between the end point P1 and the floor as
€d1 ¼ €q2þ sin ðθÞ _θ2� cos ðθÞ €θþAω2 sin ðωtÞ; ð29Þ
and the relative acceleration between the end point P2 and
thefloor as
€d2 ¼ €q2� sin ðθÞ _θ2þ cos ðθÞ €θþAω2 sin ðωtÞ:
Now, we are ready to introduce the five system states, which
wewill use for simulating this mathematical model of the planar
rod,together with the corresponding vector fields.
State 1 – Free flight: Since we make the assumption that there
isno external torque or no horizontally acting forcing present,
wehave that R¼0 and F1 ¼ 0 in Eq. (4). The only external force
actingin the vertical direction is due to gravity, and so F2 ¼ �g.
Fol-lowing this, the equations of motion of the rod in free flight
isgiven by
€q1 ¼ 0; ð30Þ
€q2 ¼ �g; ð31Þ
€θ ¼ 0; ð32Þand the corresponding dynamical system is
ð _q1; _q2; _θ ; _q4; _q5; _q6; _τÞT ¼ ðq4; q5; q6;0;
�g;0;1ÞT≔Φ1ðtÞthat will be used for the numerical simulation of the
free-flightmotion. Notice that we have included the phase τ in the
dynamicalsystem in order to have better control of the periodic
influenceof time.
State 2 – End point P1 is stuck to the floor: We will derive a
newvector field for the system when P1 is stuck to the floor.
First, fromEq. (4) we get that the equations of motion for the
constrained barare
€q1 ¼ λ1; ð33Þ
€q2 ¼ �gþλ2; ð34Þ
€θ ¼ 3 sin ðθÞλ1�3 cos ðθÞλ2: ð35ÞNext, we need to find the
forces λ1 and λ2 needed to constrain P1 tothe oscillating surface.
Substituting Eqs. (34) and (35) into Eq. (29)and using the
Amontons–Coulomb friction law λ1 ¼ sμλ2 gives€d1 ¼ �gþλ2þ sin ðθÞ
_θ
2�3 cosθ sin ðθÞsμλ2þ3 cos 2ðθÞλ2þAω2 sin ðωtÞ; ð36Þ
where s is either þ1 or �1, depending on the relative
tangentialvelocity at impact. Further, using the fact that d1 ¼ _d1
¼ €d1 ¼ 0when the end point P1 is in contact with the surface and
solvingfor λ2 gives
d point P1 constrained to the surface. (c) End point P2
constrained to the surface.
-
Fig. 4. A transitions diagram for the planar rod system showing
the five states,S1–S5 and the state transitions I–XVI. See also
Table 1 for a list of event types andtransition criteria.
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 319
λ2 ¼g� sin ðθÞ _θ2�Aω2 sin ðωtÞ
1þ3 cos 2ðθÞ�3s cos ðθÞ sin ðθÞμ ; ð37Þ
which is the normal forcing required to ensure that the
contactpoint will remain constrained to the plane.
Last, we can write the vector field for the rod with the
endpoint P1 stuck to the floor as
ð _q1; _q2; _θ ; _q4; _q5; _q6; _τÞT ¼ ðq4; q5;
q6;α1;α2;α3;1ÞT≔Φ2ðtÞwhere
α1 ¼sμ g� sin ðθÞ _θ2�Aω2 sin ðωtÞ� �
1þ3 cos 2ðθÞ�3sμ cos ðθÞ sin ðθÞ ;
α2 ¼ �gþg� sin ðθÞ _θ2�Aω2 sin ðωtÞ
1þ3 cos 2ðθÞ�3sμ cos ðθÞ sin ðθÞ ;
α3 ¼ð3sμ sin ðθÞ�3 cos ðθÞÞ g� sin ðθÞ _θ2�Aω2 sinωt
� �1þ3 cos 2ðθÞ�3sμ cos ðθÞ sin ðθÞ :
State 3 – End point P2 is stuck to the floor: Similarly,
usingsymmetry, we can write the vector field for the rod with the
endpoint P2 stuck to the floor as
ð _q1; _q2; _θ ; _q4; _q5; _q6; _τÞT ¼ ðq4; q5;
q6;α4;α5;α6;1ÞT≔Φ3ðtÞwhere
α4 ¼sμ �gþ sin ðθÞ _θ2�Aω2 sin ðωtÞ� �3sμ cosθ sin ðθÞ�1�3 cos
2ðθÞ ;
α5 ¼ �gþ�gþ sin ðθÞ _θ2�Aω2 sin ðωtÞ3sμ cosθ sin ðθÞ�1�3 cos
2ðθÞ ;
α6 ¼ð3sμ sin ðθÞ�3 cos ðθÞÞ �gþ sin ðθÞ _θ2�Aω2 sin ðωtÞ
� �3sμ cosθ sin ðθÞ�1�3 cos 2ðθÞ :
State 4 – Symmetric motion: We define symmetric motion asone
where θ mod π ¼ q6 ¼ 0 for all time, which means that thetwo end
points will impact the floor at the same time. The dyna-mical
system will be the same as in the free-flight case albeit themotion
is heavily constrained, and thus the vector field Φ1 canbe
used.
State 5 – Both end points P1 and P2 stuck to the floor: If both
endpoints are stuck to the floor it means that the centre of mass
willoscillate as DðτÞ and thus the vector field in this case is
triviallyð _q1; _q2; _θ ; _q4; _q5; _q6; _τÞT ¼ ðq4; q5; q6;0; �ω2A
sin ðωτÞ;0;1ÞT≔Φ4:
4.2. State transitions and impact mappings
For the planar rod model described above in Section 4.1
weintroduced five system states, two for free flight and three
forstick. Our proposed scheme for dealing with chatter
involvesconstraining the respective end point to the impact surface
whenthat corresponding end point is going through a chatter
sequence.The system then acts as a sliding hinge. For this purpose
we definethe critical normal contact point relative velocity as
Vtol and usethis, along with the end point accelerations, as
criteria for decidingwhen the system is going through a chatter
sequence. Vtol ischosen based on the system in question and what
makes physicalsense. In this paper we typically let Vtol be r10�6.
When animpact occurs the critical normal contact point relative
velocities_d1 and _d2 together with the critical normal contact
point relativeaccelerations €d1 and €d2 are evaluated. These values
are then usedwith a decision tree to decide if the system should
transition toanother state. It is important to note that when
calculating therelative contact point accelerations when in a stick
state, we use
the unconstrained values. This approach ensures that the
systemwill naturally release from stick due to the change in
relativeacceleration. At impact the impact law needs to be applied
todetermine what type of transition should occur. For the
modelexample described here the rate constants defined in Section
2.2now take the form
kþT ¼ �3 sin ðθÞ cos ðθÞ�μ 1þ3 sin 2ðθÞ� �
;
kþN ¼ 1þ3 cos 2ðθÞþ3μ sin ðθÞ cos ðθÞfor positive slip,
k�T ¼ �3 sin ðθÞ cos ðθÞþμ 1þ3 sin 2ðθÞ� �
;
k�N ¼ 1þ3 cos 2ðθÞ�3μ sin ðθÞ cos ðθÞfor negative slip, and
kT0 ¼ 0; kN0 ¼4
1þ3 sin 2ðθÞfor the stick regime. These rate constants are used
in the mappingsfor the numerical implementation together with a
decision tree.The process involves deciding what region the impact
correspondsto depending on initial conditions and assigning the
correspond-ing rate constants and impact map accordingly, see
further [28].However, apart from deciding what will happen at a
specificimpact the system can also switch between the different
statesdescribed in Section 4.1. The transition diagram describing
whattransitions are possible for the rod system is given in Fig. 4,
whereS1–S5 are the states introduced in Section 4.1.
A summary of all states and transitions is given in Table 1
andbrief descriptions of the 16 transitions (I–XVI) in Fig. 4 are
givenhere:
Transition I: Impact of end point P1 with j _d1 j4Vtol. The
systemwill remain in free flight State 1.
Transition II: Impact of end point P2 with j _d2 j4Vtol. The
systemwill remain in free flight State 1.
Transition III: If at impact j _d1 joVtol. The system will
transition tostick State 2.
Transition IV: If at impact j _d2 joVtol. The system will
transition tostick State 3.
Transition V: If at any moment during the constrained motion€d1
40, then the system will transition to free flightState 1.
Transition VI: If at any moment during the constrained motion
€d240 then the system will transition to free flight State 1.
Transition VII: In the limiting case where the impact angle
θapproaches zero with each impact and eventuallyreaches a
predefined threshold in which the angle can beassumed to be zero.
The system transitions to the sym-metric State 4.
-
Table 1Table corresponding to the transition diagram in Fig. 4.
The different types of transitions are I – Impact, C – Chatter, R –
Release, L – Limit, T – Two-point impact, TR – Two-point impact
with Release and TC – Two-point impact with Chatter.
Transition Type Event Transition criteria Contact angle θ
State
I I d1 ¼ 0 j _d1 j4Vtol a0 S1-S1II I d2 ¼ 0 j _d2 j4Vtol a0
S1-S1III C d1 ¼ 0 j _d1 joVtol a0 S1-S2IV C d2 ¼ 0 j _d2 joVtol a0
S1-S3V R €d140 a0 S2-S1VI R €d240 a0 S3-S1VII L d1 ¼ 0; d2 ¼ 0 j
_d1;2 j4Vtol; θ mod πoθCrit 0 S1-S4VIII TR €d240 0 S2-S3IX TR €d1o0
0 S3-S2X T d2 ¼ 0 j _d2 j4Vtol 0 S2-S4XI T d1 ¼ 0 j _d1 j4Vtol 0
S3-S4XII TC d2 ¼ 0 j _d2 joVtol 0 S2-S5XIII TC d1 ¼ 0 j _d1 joVtol
0 S3-S5XIV R €d1;24g 0 S5-S4XV TC d1 ¼ 0; d2 ¼ 0 j _d1 joVtol; j
_d2 joVtol 0 S4-S5XVI T d1 ¼ 0; d2 ¼ 0 j _d1 j4Vtol ; j _d2 j4Vtol
0 S4-S4
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324320
Transition VIII: If at impact €d1 40 and €d2 o0, then the
systemwilltransition to stick State 3.
Transition IX: If at impact €d2 40 and €d1 o0, then the system
willtransition to stick State 2.
Transition X: If at impact j _d2 j4Vtol, then the system
transitionsto the symmetric State 4.
Transition XI: If at impact j _d1 j4Vtol, then the system
transitionsto the symmetric State 4.
Transition XII: If at impact j _d2 joVtol, then the system will
tran-sition to the symmetric stick State 5.
Transition XIII: If at impact j _d1 joVtol, then the system
willtransition to the symmetric stick State 5.
Transition XIV: The system will remain in State 5 unless the
fre-quency of oscillation exceeds a critical value ωn given byωn
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig
A sin ðωτÞq
. When this value is exceeded the systemwill release from stick
and transition to the symmetricState 4. For a given ω value, ωn
will vary sinusoidallydepending on the phase of oscillation τ. When
the flooracceleration is maximal, ωn will be minimised, and whenthe
floor acceleration is minimal, ωn will be maximised.
Transition XV: If €d1;2o 0 or j _d1;2 joVtol, then the system
willtransition to the symmetric stick State 5.
Transition XVI: If at impact €d1;24 0, _d14Vtol and _d24Vtol
thesystem will remain in State 4.
4.3. Results
Here we will focus on the numerical analysis of some aspects
ofthe long-term dynamics of the impacting rod introduced in
Sec-tion 4.1. The purpose of this is twofold. First, we want to
show therobustness of the numerical techniques presented in
Sections 4.1and 4.2, and second, we want to display some of the
behaviourthat one can expect from a rattling object where energy
that isdissipated both through the impact and friction. In this
context wewill focus both on steady-state dynamics and
transients.
As discussed in Section 4.1 and shown in Fig. 3 the system
canessentially be in five different states between events (impacts
ortransitions). On top of this numerical experiments have shownthat
the more energy that is removed from the system at impactthrough
friction the faster the system tends from asymmetric tosymmetric
motion (see Fig. 5). In terms of the model examplepresented in this
work, asymmetric chaos refers to chaotic motion
when in State 1, and symmetric chaos refers to chaos when
inState 4. This indicates that if the energy that is added into
thesystem is acting in the normal direction relative to the impact
thenthe friction, which only acts in the tangential direction, will
reducethe rotational energy over time and only symmetric motion
willremain. To highlight this the example in Fig. 5(a) shows a
timehistory of the angle θ when the system goes through a
transitionfrom asymmetric to symmetric motion. Recall that θ¼ 0 θ¼
πmeans that the rod is aligned parallel to the surface. In Fig.
5(b) wesee a close up of how the actual transition in this case
happensover a very short time interval. In principal it is an
accumulation ofalternative impacts between the two ends, i.e. very
similar to whatwe see in complete chatter, but here we do not
necessarily havestick. In Fig. 5(c) we see a similar example, where
the time historyof the position of each of the two end points is
shown to highlighthow the transition between transient asymmetric
chaos andtransient symmetric chaos can occur. We note that up
toapproximately t ¼ 302 there are two separate trajectories, one
foreach end point, but suddenly the two trajectories converge and
thetwo end points move in synchrony and the rotation of the
rodends. The figure also indicates that the system stays chaotic
butwhere all the rotational energy has dissipated due to friction.
Thiswill not always be the case however, as seen in Fig. 6(a) and
(b).After t ¼ 790 the system still remains in asymmetric chaos.
Acomparison of Fig. 6 (b) with Fig. 5(c) shows the
differencebetween asymmetric and symmetric chaos. In Fig. 6(b) the
systemhas still not reached symmetric chaos (transitioned to State
4) andit is possible that it never will. In Fig. 5(c) the system
has reachedsymmetric chaos (transitioned to State 4).
In Fig. 7 a schematic transition diagram for transient
motionsfound in the rod system is shown. Note that this schematic
isbased on observations from numerical experiments of the rodsystem
and not on analytically derived conditions. In many cases,for
general initial conditions, the rod system undergoes motionakin to
asymmetric chaos until the rotational energy has dis-sipated and
the symmetric (transient) chaos takes over. Dependingon the
frequency of the external forcing the symmetric chaos maypersist or
the motion turn periodic. Again, depending on the fre-quency and
the value of the restitution coefficient the periodicorbits may
have periods of stick. The effect of this is that, at leastfor low
frequencies ω, all long term motions that we have comeacross, are
symmetric and thus brute-force bifurcation diagramsonly show stable
solutions, where the dynamics is symmetric. It is
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 321
worth noting that in the limit, where the impact times
betweenthe end points as well as the tangential impact velocities
go tozero, Map I (see Section 2.2) is successively applied and once
thetransition to symmetric motion has occurred Map I reduces to
thestandard Newtonian restitution law, which is in-line with what
isdiscussed in [28]. For the rod system in question this means
thatthe long term behaviour can simply be approximated by a
one-dimensional system of a mass impacting an oscillating
surface.While the general one-dimensional system has been
analysedbefore, see particularly Holmes [20], we will present some
specificresults for the system analysed here in order to give us an
idea on
Fig. 6. Time histories showing (a) the rod angle θ mod 2π and
(b) the con
Fig. 5. Time histories showing (a) the rod angle θ mod 2π, (b) a
close-up of (a) showing tend points P1ðtÞ and P2ðtÞ for the rod
before and after the transition from asymmetric t
what we can predict regarding the long-term behaviour for
spe-cific parameter values.
To describe how possible transitions between different types
oflong-term motion in the symmetric (one-dimensional) rod
systemoccur we show in Fig. 8(a) and (b) two brute-force
bifurcationdiagrams, ω vs. q2, for two different values of the
restitutioncoefficient, en ¼ 0:9 and en ¼ 0:8, respectively. Fig.
8(a) shows threecoexisting period-1 solutions that undergo
period-doublingsequences, at three different values of ω, until the
branches dis-appear in grazing bifurcations at ω� 3:5. The figures
also showthat regions of chaos start at ω� 3:5, with two periodic
windows
tact points P1ðtÞ and P2ðtÞ for ω¼ 4:40572; en ¼ 0:9;A¼ 1 and μ¼
0:5.
he transition from asymmetric to symmetric motion, and (c) the
surface SðtÞ and theo symmetric motion occurs. Here ω¼ 4:4050, en ¼
0:8, A¼ 1 and μ¼ 0:05.
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324322
(a period-1 and a period-3 orbit, see Fig. 9(a)) also existing
withinthe chaos. The bifurcation diagram in Fig. 8(b), where the
resti-tution coefficient is lower, we see that the onset of chaos
occurs atω� 3:8 and thus the periodic orbits are sustained longer
whenmore energy is taken out of the systems at impact. To show
whatsome of the symmetric period-1 solutions look like in Fig. 9(a)
atime series of the end points of the period-1 orbit highlighted as
p1in Fig. 8(a)ðp1Þ is shown. In Fig. 9(b) a time series of the end
pointsof the period-2 orbit highlighted as p2 in Fig. 8(b) is
shown.Similarly in Fig. 9(c) a time series of the end points of the
period-3orbit highlighted as p3 in Fig. 8(a) is shown. This shows
that freelyrattling objects subject to periodic forcing have
co-existing recur-rent motions, periodic and/or chaotic, as has
been shown before[20]. The three co-existing period-1 orbits in
Fig. 8(a) are reachedfrom different initial conditions, i.e. the
rod system is initiallyimpacting the surface at different phases of
the surface oscillation.The time history illustrated in Fig. 9(c)
corresponds to initialconditions taken from the period-1 orbit in
Fig. 8.
A useful technique for understanding the long-term behaviourin
this system is to examine how the period-1 solutions behave
Fig. 7. A schematic detailing the possible transitions from
transient asymmetricchaos to transient symmetric chaos and periodic
orbits that can occur in thesystem.
Fig. 8. Bifurcation diagrams showing how the steady-state of the
position of the centre o(b) en ¼ 0:8;A¼ 1 and μ¼ 0:05. The period-1
orbit is labelled in (a) and the period-2 an
Fig. 9. Time histories for q2 showing (a) a period-3 solution
(see label p3 in Fig. 8 (a)), (b)in Fig. 8(a)). In (a) and (c) ω¼
3:0; en ¼ 0:9;A¼ 1 and μ¼ 0:05 and in (b) ω¼ 3:55085; en
under parameter variations. In Fig. 10(a) we plot bifurcation
dia-grams using continuation methods for five different en
valuesunder ω variation. The figure shows that period-1 orbits are
bornat a smaller frequency ω the bigger the en value is. It
seemsobvious that if less energy is taken out at impact then less
energyis needed from the oscillating surface to sustain a similar
periodicorbit. In the inset I we highlight how the branches of
periodicorbits retract as en is increased. In Fig. 10(b) we show a
magnifi-cation of the region II in Fig. 10(a) to highlight that the
stablebranches born at saddle-node bifurcations (SN) undergo
period-doubling bifurcations (PD) for increasing ω, which we also
see inFig. 8(a). Fig. 10(b) also shows how the unstable periodic
orbitsborn at SN bifurcations disappear at grazing bifurcations
(G). Asmention above, these results are qualitatively in agreement
withwhat is presented in [20]. The conclusion of this is that if
the set ofparameters are such that they lie to the left of the
correspondingsaddle-node bifurcation SN in Fig. 10(b) the long-term
motion isstick and if they lie to the right of the period-doubling
bifurcationPD the long-term motion is symmetric period-n ðn41Þ or
sym-metric chaos. If the set of parameters are such that the system
isin-between SN and PD we can expect symmetric period-1 orbits
inthe long term.
5. Discussion
In this paper we introduced a framework for the
numericalsimulation of rigid-body systems with impacts and
friction, spe-cifically using the impact maps first derived in
[28]. We present
f mass q2 varies as the frequency ω is varied. In (a) en ¼
0:9;A¼ 1 and μ¼ 0:05 and ind period-3 orbits are labelled in
(b).
a period-2 solution (see label p2 in Fig. 8(b)) and (c) a
period-1 solution (see label p1¼ 0:8;A¼ 1 and μ¼ 0:05.
-
Fig. 10. Bifurcation diagrams showing how the period-1 solution
labelled p1 in Fig. 8(a) varies with ωen ¼ 0:9;0:7;0:5;0:3 and 0:1.
Solid line represents the stable limit cyclesand the dashed lines
represent unstable limit cycles. In (a) all the branches are shown
along with a magnification in panel I to further detail the
structure. In (b) amagnification of panel II in (a) is shown. It
highlights where the SN, PD and G bifurcations occur.
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324 323
the framework for a general one-point rigid-body collision
andshow how the impact maps derived in [28] can be extended toallow
for an impact between two unconstrained rigid bodies.Further we
implemented the impact maps in a hybrid simulationenvironment in
MATLAB, allowing for simulation of long-termdynamics of a planar
rod where the two end points can impactan oscillating surface. For
this purpose we introduced a frameworkthat includes an ODE solver,
system states and a transition dia-gram. This allowed us to
reliably simulate the system in free flight,through impacts, in
sticking and through complete chatter. Forinstance, the approach
involved switching vector fields when thesystem is transitioning
between stick and free flight motion,where the vector field for
stick was found by calculating the nor-mal force required to
constrain the contact point to the surface.
In Table 1 together with Fig. 4 we presented a summary of what
isneeded to detect an event and what state transition the system
willencounter. One of the shortcomings of our approach, and an area
offuture research, is that we end a complete chattering sequence
whenthe contact point velocity reaches an a priori defined
velocitythreshold Vtol, albeit small. This is in contrast to the
method that wasderived in [31] for impacts without friction, where
at the end of acomplete chatter sequence a jump in space and time
is done tominimise local numerical errors. An improvement here
would be toextrapolate through chatter sequences, using a similar
approach as in[31], until the relative velocity is zero. Another
related issue that is notfully resolved in this paper is in the
limiting case whereby two impactevents accumulate, and in our case
where the rod angle θ approacheszero. In this case we, again,
define a tolerance θcrit a priori for whenthe transition from
asymmetric to symmetric motion should occur.This was necessary to
ensure robustness in the numerical scheme.
As mentioned above, we implemented this framework for themodel
example of a slender rod impacting a periodically forcedsurface.
This example highlighted some of the phenomena present inimpacting
systems with friction, and in particular symmetric systems.The
model example can, in some sense, be likened to the problem
ofmachine rattle, whereby a machine element becomes detached andis
free to undergo unconstrained mechanical vibration. For the
rodsystem we examined the dynamics under variation of the
frequencyof surface oscillation ω. We showed that for high values
of the res-titution coefficient and low frequencies multiple
periodic solutionscoexist, however they do not survive an increase
in ω, but insteadchaotic regimes take over. Another aspect that was
highlighted forlow frequencies ω is how friction removes rotational
energy so thatmainly symmetric motions (impacts of both end points
of the rod atthe same time) persists. One of the main limitations
of the symmetricrod system is that once it is in symmetric motion
it cannot get back toasymmetric motion. If an external torque was
included or if the bar
was not completely uniform then such a transition could occur
andmost likely make the system even more unpredictable.
Althoughboth generalisations would be possible to implement, they
have notbeen considered for this work since the main goal was to
introduce aframework for simulating long-term dynamics for a
rigid-body sys-tem with impacts and friction and to highlight some
interestingfeatures that can be observed through long-term
simulations.
The model example we chose to illustrate our techniques, albeit
asimple geometry, was entirely unconstrained. Incorporating a
morecomplex geometry, with more contact points, but with one or
moreconstraints, would lead to a less complicated transition
diagram thanthe one presented in Fig. 4. The advantage of the
techniques presentedin this paper is that they can be easily
extended to and implementedfor other mechanical systems, with
relatively few contact points,where impacts and stick motions can
occur. The implementation ofour method would become increasingly
difficult for an unconstrainedsystem with more than two contact
points, and it then may benecessary to consider a time-stepping
scheme. However, it wouldthen not be possible to perform the
careful stability analysis techni-ques illustrated in this paper.
Further, the numerical scheme does notneed to handle large number
of events at one time and it is possible todeal with complete
chatter sequences. The algorithm described herecan also be exported
directly to methods that locate periodic orbitsand determine their
stability using a shooting method, which is theonly useful method
to date that can be used for periodic orbits withincomplete or
complete chatter.
This paper has opened up new research questions
regardingnumerical methods, as mentioned above, but also the exact
role frictionhas in dissipating rotational energy in general
rattling objects. It may bepossible to find a relationship between
the energy removed due tofriction and the energy introduced into
the system through the peri-odic forcing. Such analysis may be a
useful predictive tool for engineersworking with unconstrained
impacting systems with friction.
Acknowledgements
S.B. wishes to acknowledge the economic support from theNational
University of Ireland, Galway (NUI Galway) through a PhDscholarship
in applied mathematics.
References
[1] V. Acary, B. Brogliato, Numerical Methods for Nonsmooth
Dynamical Systems:Applications in Mechanics and Electronics, vol.
35, Springer-Verlag, London,UK, 2007.
http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref114http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref114http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref114
-
S.J. Burns, P.T. Piiroinen / International Journal of Non-Linear
Mechanics 77 (2015) 312–324324
[2] J. Adolfsson, H. Dankowicz, A. Nordmark, 3D passive walkers:
finding periodicgaits in the presence of discontinuities, Nonlinear
Dyn. 24 (2001) 205–229.
[3] R. Alzate, M. di Bernardo, U. Montanaro, S. Santini,
Experimental andnumerical verification of bifurcations in
cam-follower systems, J. NonlinearDyn. 50 (2007) 409–429.
[4] R. Alzate, P.T. Piiroinen, M. di Bernardo, From complete to
incomplete chat-tering: a novel route to chaos in impacting
cam-follower systems, Int. J. Bifurc.Chaos 22 (5) (2012)
409–429.
[5] E. Barthel, Adhesive elastic contacts: JKR and more, J.
Phys. D: Appl. Phys. 41(2008) 1–20.
[6] R.M. Brach, Classical planar impact theory and the tip
impact of a slender rod,Int. J. Impact Eng. 13 (1) (1993)
21–33.
[7] R.M. Brach, Mechanical Impact Dynamics, Rigid Body
Collisions, John Wiley &Sons, New York, 2007.
[8] B. Brogliato, Nonsmooth Mechanics, Springer-Verlag, London,
UK, 2007.[9] C.J. Budd, F. Dux, Chattering and related behaviour in
impact oscillators, Philos.
Trans. R. Soc. Lond. A 347 (1994) 365–389.[10] C.J. Budd, P.T.
Piiroinen, Corner bifurcations in non-smoothly forced impact
oscillators, Physica D 220 (2006) 127–145.[11] S.J. Burns, P.T.
Piiroinen, The complexity of a basic impact mapping for rigid
bodies with impact and friction, J. Regul. Chaot. Dyn. 19 (1)
(2014) 20–36.[12] D. Chillingworth, Discontinuity geometry for an
impact oscillator, Dyn. Syst. 17
(2002) 380–420.[13] H. Dankowicz, P.T. Piiroinen, Exploiting
discontinuities for stabilization of
recurrent motions, Dyn. Syst. 17 (2002) 317–342.[14] M. di
Bernardo, C.J. Budd, A.R. Champneys, P. Kowalcyzk, Bifurcation and
Chaos
in Piecewise Smooth Dynamical Systems – Theory and Applications,
Springer-Verlag, London, UK, 2007.
[15] M. di Bernardo, C.J. Budd, A.R. Champneys, P. Kowalczyk,
Piecewise SmoothDynamical Systems – Theory and Applications,
Springer-Verlag, London, UK,2008.
[16] M. Fredriksson, A. Nordmark, Oblique frictional impact of a
bar: analysis andcomparison of different impact laws, Nonlinear
Dyn. 41 (2005) 361–383.
[17] F. Génot, B. Brogliato, New results on painlevé paradoxes,
Eur. J. Mech. A/Solids18 (1999) 653–677.
[18] M. Ghajari, U. Galvanetto, L. Iannucci, R. Willinger,
Influence of the body on theresponse of the helmeted head during
impact, Int. J. Crashworthiness 16 (3)(2011) 285–295.
[19] W. Goldsmith, Impact: The Theory and Physical Behaviour of
Colliding Solids,Dover Publications, London, UK, 2001.
[20] P.J. Holmes, The dynamics of repeated impacts with a
sinusoidally vibratingtable, J. Sound Vib. 84 (2) (1982)
173–189.
[21] A.P. Ivanov, Energetics of a collision with friction, J.
Appl. Math. Mech. 56(1992) 527–534.
[22] P.S. Keogh, M.O.T. Cole, Rotor vibration with auxiliary
bearing contact inmagnetic bearing systems part 1: synchronous
dynamics, J. Mech. Eng. Sci. 217(4) (2003) 377–392.
[23] R.I. Leine, B. Brogliato, H. Nijmeijer, Periodic motion and
bifurcations inducedby the painlevé paradox, Eur. J. Mech. A/Solids
21 (2002) 869–896.
[24] R.I. Leine, H. Nijmeijer, Dynamics and Bifurcations of
Non-smooth MechanicalSystems, Lecture Notes in Applied And
Computational Mechanics, vol. 18,2004.
[25] R.I. Leine, D.H. van Campen, C.H. Glocker, Nonlinear
dynamics and modellingof various wooden toys with impact and
friction, J. Vib. Control 9 (2003) 1–2.
[26] J. Mason, M. Homer, R.E. Wilson, Mathematical models of
gear rattle in rootsblower vacuum pumps, J. Sound Vib. 308 (2007)
431–440.
[27] A. Nordmark, Existence of periodic orbits in grazing
bifurcations of impactingmechanical oscillators, Nonlinearity 14
(2001) 1517–1542.
[28] A. Nordmark, H. Dankowicz, A. Champneys,
Discontinuity-induced bifurcationin systems with impacts and
friction: discontinuities in the impact law, Int. J.Non-Linear
Mech. 44 (2009) 1011–1023.
[29] A. Nordmark, H. Dankowicz, A. Champneys, Friction-induced
reverse chatterin rigid-body mechanisms with impacts, IMA J. Appl.
Math. 76 (2011) 85–119.
[30] A.B. Nordmark, Non-periodic motion caused by grazing
incidence in impactoscillators, J. Sound Vib. 2 (1991) 279–297.
[31] A.B. Nordmark, P.T. Piiroinen, Simulation and stability
analysis of impactingsystems with complete chattering, Nonlinear
Dyn. 58 (2009) 85–106.
[32] G. Osorio, M. di Bernardo, S. Santini, Chattering and
complex behaviour of acam-follower system. Proc. of ENOC 2005
European Conference on NonlinearDynamics; August 2005.
[33] F. Pfeiffer, C. Glocker, Multibody Dynamics with Unilateral
Contacts, WILEY-VCH, Weinheim, Germany, 2004.
[34] P.T. Piiroinen, H.J. Dankowicz, Low-cost control of
repetitive gait in passivebipedal walkers, Int. J. Bifurc. Chaos 15
(6) (2005) 1959–1973.
[35] P.T. Piiroinen, H.J. Dankowicz, A.B. Nordmark, Breaking
symmetries and con-straints: transitions from 2D to 3D in passive
walkers, Multibody Syst. Dyn. 10(2003) 147–176.
[36] P.T. Piiroinen, Y.A. Kuznetsov, An event-driven method to
simulate Filippovsystems with accurate computing of sliding
motions, ACM Trans. Math. Softw.34 (2008) 3.
[37] W.J. Stronge, Rigid body collisions with friction, Math.
Phys. Sci. 431 (1881)(1990) 169–181.
[38] W.J. Stronge, Impact Mechanics, Cambridge University Press,
Cambridge, UK,2000.
[39] Y. Wang, M.T. Mason, Two-dimensional rigid-body collisions
with friction, J.Appl. Mech. 59 (1992) 635–642.
[40] Z. Zhao, C. Liu, B. Brogliato, Planar dynamics of a rigid
body system withfrictional impacts, II. Qualitative analysis and
numerical simulations, Proc. R.Soc. A 465 (2009) 2267–2292.
http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref2http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref2http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref2http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref3http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref3http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref3http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref3http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref4http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref4http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref4http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref4http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref5http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref5http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref5http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref6http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref6http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref6http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref7http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref7http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref8http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref9http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref9http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref9http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref10http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref10http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref10http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref11http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref11http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref11http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref12http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref12http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref12http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref13http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref13http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref13http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref14http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref14http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref14http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref15http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref15http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref15http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref16http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref16http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref16http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref17http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref17http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref17http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref18http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref18http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref18http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref18http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref124http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref124http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref20http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref20http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref20http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref21http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref21http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref21http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref22http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref22http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref22http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref22http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref23http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref23http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref23http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref25http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref25http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref25http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref26http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref26http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref26http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref27http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref27http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref27http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref28http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref28http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref28http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref28http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref29http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref29http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref29http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref30http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref30http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref30http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref31http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref31http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref31http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref134http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref134http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref34http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref34http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref34http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref35http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref35http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref35http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref35http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref36http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref36http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref36http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref37http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref37http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref37http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref38http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref38http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref39http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref39http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref39http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref40http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref40http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref40http://refhub.elsevier.com/S0020-7462(15)00175-4/sbref40
A hybrid scheme for simulation of planar rigid bodies with
impacts and friction using impact mappingsIntroductionPlanar
rigid-body impacts with frictionEquations of motionFree
flightContact
Energetic impact lawDynamics
Numerical methodsSystem statesBifurcation diagrams and stability
analysis
Dynamics of a slender rod impacting a periodically oscillating
surfaceThe model, system states and vector fieldsState transitions
and impact mappingsResults
DiscussionAcknowledgementsReferences