Embed Size (px)
Citation preview

•AmethodtoanalyzetheabilityofISFtoobtainanarbitrary,user-defined,desiredspatialresponseattheoutputofthefilterwaspresented.•WithperfectknowledgeofthesourceDOAsthedesiredspatialresponsecanbeobtainedattheoutputoftheISF.•ThroughtheanalysisitwasshownthatrobustnessagainstDOAestimationerrorsisimportantandessentialfortheISFframework.
E-Mail:
soumitro.
E-Mail:
soumitro.
5. Simulation Experiment
6. Conclusions
•ULAwithM=5
•SourceBplacedatI=37discretepoints
•Anechoicenvironment
•Source-microphonedistance:1.8m
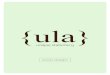
Obtained vs Desired : Known DOAs
Obtained vs Desired : DOA errors + Different passband widths
SDI Obtained vs Desired Array Gain: Source B
•DOAerrorvariance:15O
•Passbandwidths:20Oand30O
•DOAerrorvariance:5Oand10O
•Passbandwidths:20Oand30O
✓̂A(n, k) = ✓A +✓A(n, k),
✓̂B,i(n, k) = ✓B,i +✓B,i(n, k)
DOA estimates with error
σ2DOA = E{✓2}
Simulation Setup
Error variance
[1]O.Thiergart,M.Taseska,andE.A.P.Habets,“Aninformedparametricspatialfilterbasedoninstantaneousdirection-of-arrivalestimates,”IEEETransAcoust.,Speech,SignalProcess.,vol.22,no.12,pp.2182–2196,Dec2014.
Source A
Microphone Array
Source B
positionsI= 9
4. Proposed Analysis Method
Average Directional Array Gain
Ad,i =1
card(Ti)X
(n,k)2Ti
GA(n, k)
GB,i(n, k)
GA(n, k) =|X̃A(n, k)|2
|XA(n, k,d1)|2
•Proposed method can also be used for L =1 or L > 2.
•By varying the input signal-to-interference ratio (iSIR) the proposed method can be used to identify the critical iSIR where the single plane wave signal model is violated.
GB,i(n, k) =|X̃B,i(n, k)|2
|XB,i(n, k,d1)|2
•Assumption:L=2
•SamplecompleteDOArangeatIdiscretepoints.
•SourceAiskeptstaticatbroadside
•SourceBismovedthroughthewholeDOArange,placingitattheIdiscretepoints.
Setup
Ti = {(n, k) : |XA(n, k,d1)| ≥ ✏A ^ |XB,i(n, k,d1)| ≥ ✏B}
0 30 60 90 120 150 180
−40
−30
−20
−10
0
Magnitude[dB]
DOA θ[◦]
•Thespatialresponseisanarbitrary,user-definedfunctionthatcanbepotentiallycomplexvaluedandfrequencydependent.
•Thedesignofthedesiredspatialresponsefunctionisalsodependentontheapplication.
3. Desired Spatial Response
2. Informed Spatial Filter: Review
•Considerauniformlineararray(ULA)ofMmicrophoneslocatedat.Themicrophonesignalsaregivenby
•Assumingsignalcomponentsaremutuallyuncorrelated
•Desiredsignal
•Estimateofthedesiredsignal
•Microphonesignalofl-thplanewave• Soundpressureofl-thplanewave
•m-thelementofsteeringvector
•NoisePSDmatrix
•Directiondependentgain
•Filterweights
•PropagationvectorsofLsources
Definitions
•Formulation:s.t.
•Solution:with
•Thedirectiondependentgaincorrespondstothevalueofanarbitraryspatialresponsefunctiong(✓, k),evaluatedattheDOAofthel-thplanewave.
Informed LCMV filter
d1...M
y(n, k) =
LX
l=1
xl(n, k)
| {z }x(n,k)
+xn(n, k)
y(n, k) = E{y(n, k)yH(n, k)}= x(n, k) +n(n, k)
Z(n, k) =
LX
l=1
G(✓l, k)Xl(n, k,d1)
xl(n, k) = [Xl(n, k,d1) . . . Xl(n, k,dM )]T
xl(n, k) = a(✓l, k)Xl(n, k,d1)
am(✓l, k) = exp{jrm cos ✓l(n, k)}
n(n, k) = n(k) I
G(✓l, k)
w(n, k)
A = [a(✓1, k), . . . ,a(✓L, k)]
w(n, k) = arg minw
wHn(n, k)w wH(n, k)a(✓l, k) = G(✓l, k)
w(n, k) = 1n A
⇥AH1
n A⇤1
g
G(✓l, k)
g = [G(✓1, k), . . . , G(✓L, k)]H
bZ(n, k) = wH(n, k)y(n, k)
1. Introduction
•Proposeamethodtoanalysetheobtainedspatialresponseandcompareittothedesiredresponse.•Gaininsightintotheobtainedspatialresponseattheoutputofthespatialfilter.•AnalysetheeffectofDOAestimationerrorsontheobtainedspatialresponse,andprovideanobjectivemotivationfortheneedofrobustnessagainstDOAestimationerrors.
Aim
A Method to Analyze the Spatial Response of Informed Spatial Filters
Soumitro Chakrabarty, Oliver Thiergart, Emanuël. A. P. Habets
International Audio Laboratories Erlangen
E-Mail: [email protected]
INTERNATIONAL AUDIO LABORATORIES ERLANGENA joint institution of Fraunhofer IIS and Universität Erlangen-Nürnberg
•Informedspatialfilters(ISFs)[1]aredesignedtocapturemultiplesoundsourceswithadesired,arbitraryspatialresponseateachTFinstantwhileattenuatingundesiredsignalcomponents.•Thedesiredspatialresponsefunctionisdifferentfromthedirectivitypatternofthespatialfilter.
•Acomparativeanalysisoftheobtainedandthedesiredspatialresponsehasnotbeenperformedyet.
Motivation