Embed Size (px)
Citation preview

Julien Laurent-Varin
Interior point algorithm for the optimizationof a space shuttle re-entry trajectory
.
Julien Laurent-Varin, CNES-INRIA-ONERA
Common work with
J. F. Bonnans INRIA, N. Bérend ONERA,
M. Haddou U. Orléans, C. Talbot CNES

Introduction
● Context
● Ultimate aims of this work
● Survey
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 2
Introduction

Introduction
● Context
● Ultimate aims of this work
● Survey
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 3
Context
■ A typical mission
Orbiter et Boosteron ground
Booster separation
Retour booster
Rendez-vous with stationOrbital station
End of mission
■ A challenge for optimal control software

Introduction
● Context
● Ultimate aims of this work
● Survey
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 4
Ultimate aims of this work
■ Efficient method for solving optimal controlproblems with path constraints
■ Compute the ascent trajectory of classical launcher■ Compute reentry trajectory of an orbitor■ Compute the whole trajectory of a future space
launcher (with possible rendez-vous)

Introduction
● Context
● Ultimate aims of this work
● Survey
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 5
Survey
[1] J.T. Betts. Survey of numerical methods fortrajectory optimization. AIAA J. of Guidance,Control and Dynamics, 21:193–207, 1998.
[2] J.T. Betts. Practical methods for optimal controlusing nonlinear programming. Society forIndustrial and Applied Mathematics (SIAM),Philadelphia, PA, 2001.

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 6
Discretization

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 7
Problem descrition (P)
Consider the optimal control problem (P) :
Min Φ(y(T ));
y(t) = f(u(t), y(t)), t ∈ [0, T ];
y(0) = y0.
(P )
Discretize dynamic with Runge-Kutta method

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 8
Discretized Problem (DP)
Min Φ(yN );
yk+1 = yk + hk
∑si=1 bif(uki, yki),
yki = yk + hk
∑sj=1 aijf(ukj , ykj),
y0 = y0.
(DP )
[1] W. Hager. Runge-Kutta methods in optimalcontrol and the transformed adjoint system.Numer. Math., 87(2):247–282, 2000.

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 9
Optimal conditions of (DP)
yk+1 = yk + hk
∑si=1 bif(uki, yki),
yki = yk + hk
∑sj=1 aijf(ukj, ykj),
pk+1 = pk + hk
∑si=1 bify(yki, uki)
T pki,
pki = pk + hk
∑sj=1 aijfy(ykj, ukj)
Tpkj ,
0 = fu(yk, uk)Tpk,
0 = fu(yki, uki)Tpki,
y0 = y0, pN = Φ′(yN ).
(DOC)
Where : b = b and aij =bibj − bjaij
bifor all i, j.
Partitioned RK methods
Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 10
Optimal conditions of (P)
y(t) = f(u(t), y(t)),
p(t) = −fy(u(t), y(t))Tp(t),
p(T ) = Φ′(y(T )), y(0) = y0,
0 = fu(u(t), y(t))Tp(t).
(OC)
Previous scheme = (partitioned) symplectic schemesfor (OC) deeply described in [1]
[1] E. Hairer, C. Lubich, and G. Wanner. Geometricnumerical integration. Springer-Verlag, Berlin,2002.

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 11
Commutative diagram
(P )discretization−−−−−−−−−−→ (DP )
optimality
conditions
y
optimality
conditions
y
(OC)discretization−−−−−−−−−−→ (DOC)
(D)

Introduction
Discretization
● Problem descrition (P)
● Discretized Problem (DP)
● Optimal conditions of (DP)
● Optimal conditions of (P)
● Commutative diagram
● Summary
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 12
Summary
Complete error analysis for :■ unconstrained problems■ with strongly convex Hamiltonians
Existing theory for :■ control constraint■ order one state constraints
(Dontchev, Hager)
Open problems :■ Singular arcs■ high order state constraints

Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 13
Order conditions

Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 14
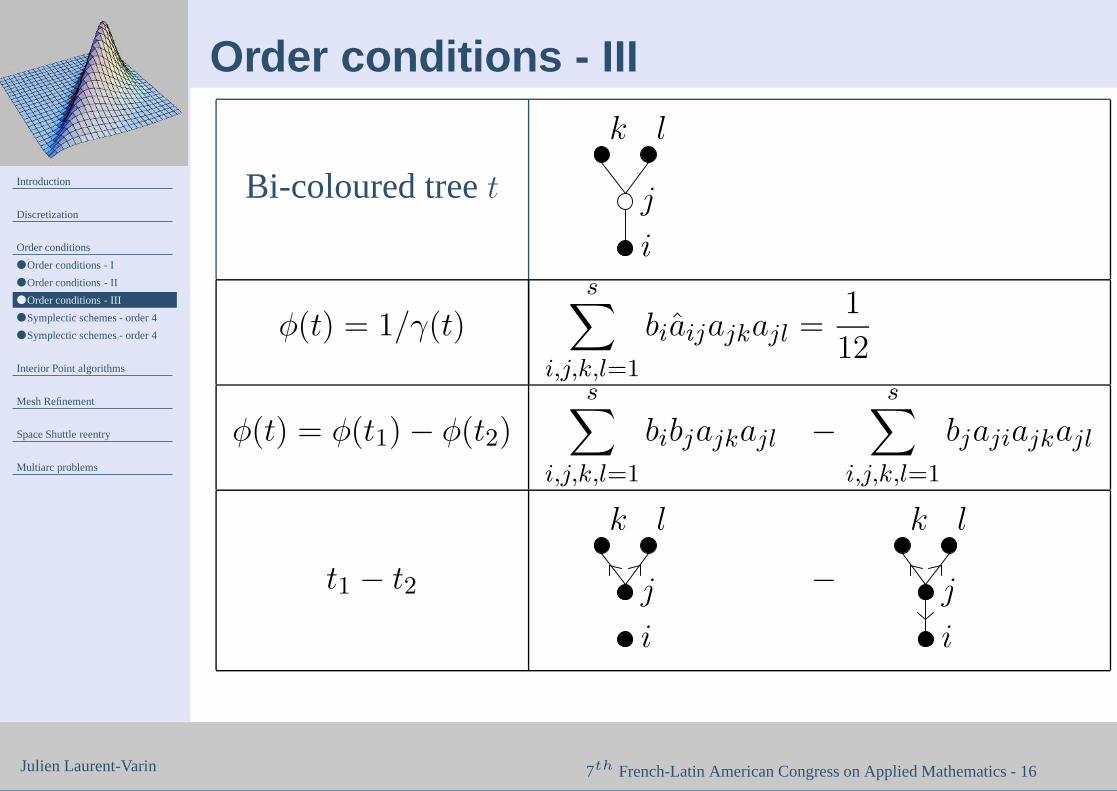
Order conditions - I
For partitionned Runge-Kutta Schemes, we haveorder conditions based on bi-colored rooted tree. Forexample :
Bi-coloured tree t
i
j
k l
φ(t) = 1/γ(t)s
∑
i,j,k,l=1
biaijajkajl =1
12

Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 15
Order conditions - II
But our partitionned schemes is particular and havethe following propertise :
bi = bi ∀i = 1, . . . , s
aij = bj −bjbiaji ∀i = 1, . . . , s ∀j = 1, . . . , s
(1)
This propertise leads to computation that can beinterpreted in term of graph computation.
Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 16
Order conditions - III
Bi-coloured tree t
i
j
k l
φ(t) = 1/γ(t)s
∑
i,j,k,l=1
biaijajkajl =1
12
φ(t) = φ(t1) − φ(t2)
s∑
i,j,k,l=1
bibjajkajl −s
∑
i,j,k,l=1
bjajiajkajl
t1 − t2
i
j
k l
−i
j
k l

Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 17
Symplectic schemes - order 4
Graph Condition Graph Condition∑ 1
bkalkdkdl =
1
8
∑
ajkdjck =1
24
∑ bibkaikcidk =
5
24
∑
biaijcicj =1
8
∑
c2jdj =1
12
∑
bic3i =
1
4
∑ 1
bkckd
2k =
1
12
∑ 1
b2ld3
l =1
4

Introduction
Discretization
Order conditions
● Order conditions - I
● Order conditions - II
● Order conditions - III
● Symplectic schemes - order 4
● Symplectic schemes - order 4
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 18
Symplectic schemes - order 4
In the previous table, we use the usual notations
dj =∑
i
biaij
andci =
∑
j
aij
.

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 19
Interior Point algorithms

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 20
History
[1] A.V. Fiacco and G.P. McCormick. Nonlinearprogramming. John Wiley and Sons, Inc., NewYork-London-Sydney, 1968.
[2] L. G. Hacijan. A polynomial algorithm in linearprogramming. Dokl. Akad. Nauk SSSR,244(5):1093–1096, 1979.
[3] N. Karmarkar. A new polynomial-time algorithmfor linear programming. Combinatorica,4(4):373–395, 1984.

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 21
Basic idea
Transformation of constrained problem (forgetequality constraints in order to simplify presentation)
Min f(x); g(x) ≥ 0 (P )
Logarithmic penalty
Min f(x) − ε ln g(x) (Pε)
Unconstrained problem solved by Newton steps onoptimality conditions, with basic safeguards

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 22
For our problem
Min
∫ T
0`(u(t), y(t), up, t)dt+ `f (y(T ), up, T );
y(t) = f(u(t), y(t), up, t), t ∈ [0, T ];
yi(0) = y0i ∀i ∈ I0, yi(T ) = yT
i ∀i ∈ IT
a ≤ g(u(t), y(t), up, t) ≤ b, t ∈ [0, T ].
(P )
Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 23
For our problem
Min
∫ T
0`ε(u(t), y(t), up, t)dt+ `f (y(T ), up, T );
y(t) = f(u(t), y(t), up, t), t ∈ [0, T ];
yi(0) = y0i ∀i ∈ I0, yi(T ) = yT
i ∀i ∈ IT .
(Pε)With
`ε(u, y, up, t) := `(u, y, up, t)−εX
i
[log(gi(u, y, up, t) − ai) + log(bi − gi(u, y, up, t))]

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 24
Combination with mesh refinement
We must have ε ↓ 0 (IP parameter) and E ↓ 0
(Integration error)
Good News : Both can be reduced simultaneously :interpolate values at additional points. Our(somewhat arbitrary) choice :For a fixed ε, we refine mesh until
E ≤ cε; c = 1/10 in our tests.

Introduction
Discretization
Order conditions
Interior Point algorithms
● History
● Basic idea
● For our problem
● For our problem
● Combination with mesh
refinement
● Sparsity structure
Mesh Refinement
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 25
Sparsity structure
A B
C D
■ Band matrix: distributed variables, band QRavailable
■ Full pieces: static parameters■ Solve by elimination of distributed variables

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
● Modelisation of error
● Optimal refinement problem
● Maximal gain index
● Resolution of (ORP)
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 26
Mesh Refinement

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
● Modelisation of error
● Optimal refinement problem
● Maximal gain index
● Resolution of (ORP)
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 27
Modelisation of error
■ k : index of time step■ ek = Ckh
p+1k : error model (valid for hk small)
estimated by variable order (symplectic) schemes.Adding (qk − 1) points in kth step ⇒ estimate of errorbecomes :
ekqpk

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
● Modelisation of error
● Optimal refinement problem
● Maximal gain index
● Resolution of (ORP)
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 28
Optimal refinement problem
Reach a specific error estimationMinimise the number of added pointsInteger programming problem with a single nonlinearconstraints
Minq∈NN
N∑
k=1
qk;N
∑
k=1
ekqpk
≤ E (ORP )

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
● Modelisation of error
● Optimal refinement problem
● Maximal gain index
● Resolution of (ORP)
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 29
Maximal gain index
Definition 1. Maximal marginal gain g and maximal gainindex kg for which the maximum error reduction is obtainedby adding only one point :
g(q) := maxk
ek(
1/qpk − 1/(qk + 1)p)
(2)
kg := argmaxk
ek(
1/qpk − 1/(qk + 1)p)
(3)

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
● Modelisation of error
● Optimal refinement problem
● Maximal gain index
● Resolution of (ORP)
Space Shuttle reentry
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 30
Resolution of (ORP)
Algorithm 1. AORP
For k = 1, . . . , N do qk := 1. End for
While∑N
k=1 ek/qpk > E do
Compute kg, the maximal gain index.qkg
:= qkg+ 1.
End While
This algorithm solves (ORP) inO(((E0/E)p + 1)N logN) operations

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 31
Space Shuttle reentry

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 32
Control variables
µ
γ
α
~V
Bank angle µ Flightpath angle (γ)
Angle of attack (α)

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 33
State variables
z altitude V velocity
λ longitude γ flightpath angle
φ latitude ψ azimuth

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 34
Dynamic I
z = V sin γ
λ =V cos γ sinψ
(z +Re) cosφ
φ =V cos γ cosψ
z +Re

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 35
Dynamic II
V = −Dm
− g sin γ
γ =L cosµ
mV+
(
V 2
z +Re− g
)
cos γ
V
ψ =L sinµ
mV cos γ+
V
z +Recos γ sinψ tanφ

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 36
Cost
Max crossrange (final latitude)
J := φ(T )

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 37
Constraints
Control constraints :{
0◦ ≤ α ≤ 50◦
−90◦ ≤ µ ≤ 0◦
Mixed control-state contraint (Heating flux) :
q(α)√ρV 3.07 ≤ Qmax
withq(α) = c0 + c1α+ c2α
2 + c3α3
Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 38
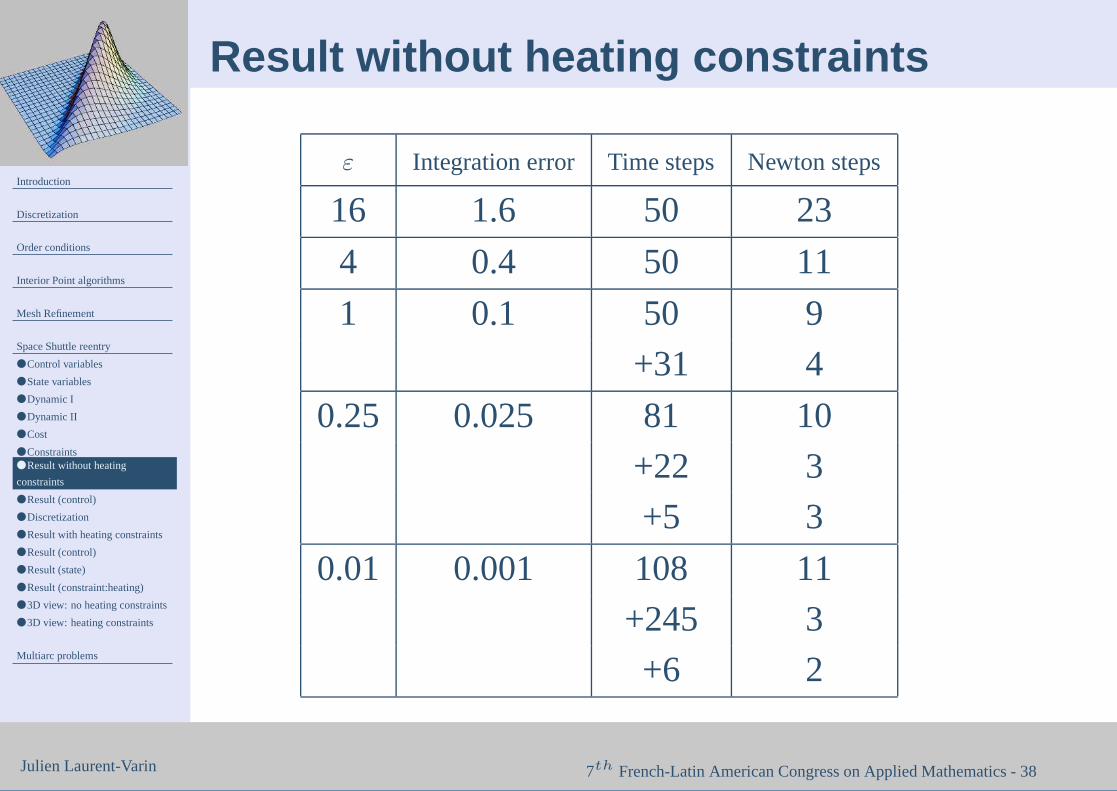
Result without heating constraints
ε Integration error Time steps Newton steps
16 1.6 50 23
4 0.4 50 11
1 0.1 50 9
+31 4
0.25 0.025 81 10
+22 3
+5 3
0.01 0.001 108 11
+245 3
+6 2

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 39
Result (control)
0 400 800 1200 1600 2000 240016
18
20
22
24
26
28Angle of attack (deg)
0 400 800 1200 1600 2000 2400-80
-70
-60
-50
-40
-30
-20
-10
0Bank angle (deg)

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 40
Discretization
0 200 400 600 800 1000 1200 1400 1600 1800 20000.0000
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008
0.0009

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 41
Result with heating constraints
We add the constraint of heating and we compare theresults

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 42
Result (control)
0 400 800 1200 1600 2000 240016
18
20
22
24
26
28
30Angle of attack (deg)
0 400 800 1200 1600 2000 2400-80
-70
-60
-50
-40
-30
-20
-10
0Bank angle (deg)
Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 43
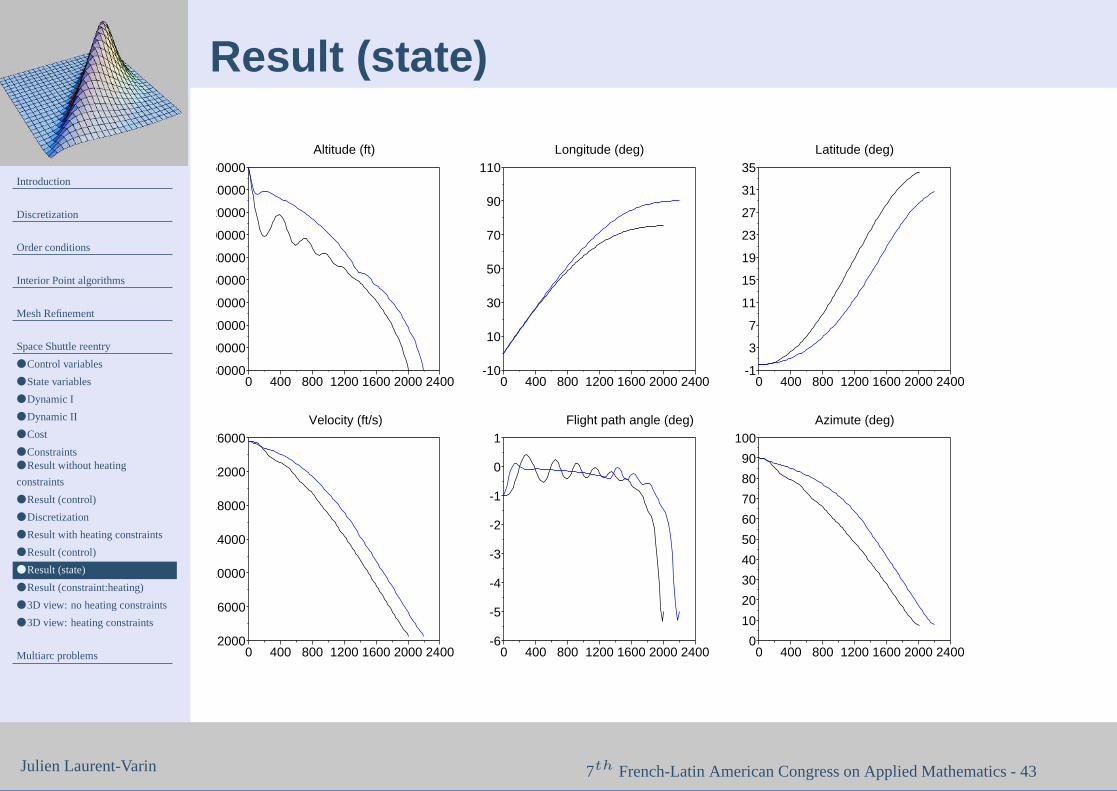
Result (state)
0 400 800 1200 1600 2000 240080000
100000
120000
140000
160000
180000
200000
220000
240000
260000Altitude (ft)
0 400 800 1200 1600 2000 2400-10
10
30
50
70
90
110Longitude (deg)
0 400 800 1200 1600 2000 2400-1
3
7
11
15
19
23
27
31
35Latitude (deg)
0 400 800 1200 1600 2000 24002000
6000
10000
14000
18000
22000
26000Velocity (ft/s)
0 400 800 1200 1600 2000 2400-6
-5
-4
-3
-2
-1
0
1Flight path angle (deg)
0 400 800 1200 1600 2000 24000
10
20
30
40
50
60
70
80
90
100Azimute (deg)

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 44
Result (constraint:heating)
0 400 800 1200 1600 2000 24000
20
40
60
80
100
120
140
160
180
Heating

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 45
3D view: no heating constraints
8
11
14
17
20
23
26
h/10^4
-10
0
10
20
30
40
50
60
70
80
phi-1 3 7 11 15 19 23 27 31 35theta

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
● Control variables
● State variables
● Dynamic I
● Dynamic II
● Cost
● Constraints● Result without heating
constraints
● Result (control)
● Discretization
● Result with heating constraints
● Result (control)
● Result (state)
● Result (constraint:heating)
● 3D view: no heating constraints
● 3D view: heating constraints
Multiarc problems
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 46
3D view: heating constraints
8
11
14
17
20
23
26
h/10^4
0
10
20
30
40
50
60
70
80
90
100
phi-1 3 7 11 15 19 23 27 31theta

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 47
Multiarc problems

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 48
Scenario graph
1
42
5
3
6
■ V set of vertices■ E set of edges■ Edges: Distributed in time cost and constraints■ Vertices: Junction conditions, cost and constraints

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 49
Edges: variables
■ Edge E 3 e = (i, j)
■ y(t) ∈ IRne: state■ u(t) ∈ IRme: control■ π ∈ IRre: “static” optimization parameters

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 50
A view after discretization
Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 51
Edges: cost and constraints
■ `e(t, y(t), u(t), π): Distributed cost■ y(t) = fe(t, y(t), u(t), π): Dynamics■ ge(t, y(t), u(t), π) ≤ 0: Distributed
constraints
■ The value function over arc = integral of costfunction.
■ Feasibility = dynamics are satisfied and distributedconstraints hold.

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 52
Vertices: variables
■ Vertice j ∈ V
■ Variables zj ∈ IRnj
■ Includes copy of boundary (initial of final) state yBeand parameters πe of connected edges
■ Possibility of other variables

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 53
Vertices: cost and constraints
■ `i(z): Cost■ yB
e = ze: Copy constraints■ gi(z)) = 0: Equality constraints■ gi(z)) ≤ 0: Inequality constraints

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 54
Cost of factorization and solve
■ Arcs: O(n2NT )
- n number of state variables- NT average number of time steps per arc
■ Vertices (junctions): O(n) size linear systems- Recursive elimination, starting from leaves- O(n3) operations for each (elimination of) vertex
■ Total number of operations:
n2O(|E|NT + n|V |)
Seems to be the least possible number !

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 55
Perspectives
■ Implementation of multi-arc methodology■ Test on various examples■ Analysis of convergence (difficult)
- Vanishing parameter ε- Mesh refinement

Introduction
Discretization
Order conditions
Interior Point algorithms
Mesh Refinement
Space Shuttle reentry
Multiarc problems
● Scenario graph
● Edges: variables
● A view after discretization
● Edges: cost and constraints
● Vertices: variables
● Vertices: cost and constraints
● Cost of factorization and solve
● Perspectives
● Some references
Julien Laurent-Varin 7th French-Latin American Congress on Applied Mathematics - 56
Some references
[1] J. Laurent-Varin, N. Bérend, F. Bonnans,M. Haddou, and C. Talbot. On the refinement ofdiscretization for optimal control problems. 16th
IFAC SYMPOSIUM Automatic Control inAerospace, 14-18 june, St. Petersburg, Russia.
[2] J Laurent-Varin and F Bonnans. Computation oforder conditions for symplectic partitionedRunge-Kutta schemes with application to optimalcontrol. Technical Report RR 5398, INRIA,2004.

56-1