-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
1/6
Interaction with virtual environment using verbal/ non-verbal
com municationTomoaki Ozaki*,*Faculty of Computer S cienc e and
System Engineering,Kazuaki Tanaka" & Norihiro Abe*
Kyusyu Institute of TechnologyIizuka-shi, 820-8502
[email protected] Introduction
2 System configurationMany expert systems have been made up to
now. Because thesystem can't detect human's behavior justly, there
is the case thatdialogs with the system fail. It is epoch-making in
the point thata virtual reality system can solve this problem by
leading thehuman being to the space of a computer. In the virtual
realitysystem, human's non-verbal behavior can be input into
thecomputer system using sensors and data gloves.This system is
different from the traditional interface using bothmouse and
keyboard, it is possible to watch the behavior of auser and to
instruct a right method when it is wrong. But thissystem wasn't
able to know the intention of user definitelybecause n o voice
interaction facility is provided with the user.In other words, only
in human non-verbal behavior, System can'tcompletely detect the
human intention and hesitation [2].In communication between human
being, a spoken languagebecomes important element besides
non-verbal behavior. So, inthis research, using speech recognition
technology and adoptingvoice interaction to the virtual reality
system, we propose verbal/non-verbal communication with human being
and a computersystem.The interface that both spoken language and
non-verbal behaviorcan be input at the same time in order to
realize verbal/ non-verbal communication. A virtual reality system
can be broughtclose to a real environment more by using this
interface. Forexample, we can ask or issue an order on an object to
the systemusing a spoken language while pointing at the object with
a dataglove.We selected assembly/ disassembly of a virtual machine
as thefield of application of verbal/ non-verbal communication.
Webuilt the assembly training system which has a user acquire
aright assembly/ disassembly method by allowing a user tosimulate
assembly operation and to issue an inquiry or commandto the system
using data glov e and a spoken language in a virtualreality system
in which three-dimensional object models ofmechanical parts are
arranged.
0-7803-5731-0/99$10.001999 EEE
2.1 Hardware organizationThe system consists of the computer
which builds a virtualreality system, a microphone for a user to
perform voice input,and 3-dimensional position sensors and data
gloves for a user toinput non-verbal behavior. General drawing is
shown in figure 1.
SG I workstation
Figure 1 . Hardware organization2.2 Continuous speech
recognition parser (JULIAN)This research used JULIAN which Prof.
Doshita's researchlaboratory in Kyoto University developed as a
speechrecognition software. JULIAN is a recognition parser
performingcontinuous speech recognition on the basis of a finite
stategrammar (DFA). It begins to look for the most plausible word
listbased on a given DFA for voice input from the
microphone(continuous speech to make a pose with gap) and outputs
it as acharacter string. DFA is made from vocabulary and the
syntaxrule that a user registered.
IV- 170
mailto:[email protected]:[email protected]
-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
2/6
2.3 OpenlnventorTo build a virtual reality system,
three-dimensional surfacemodels are used. A three-dimensional
graphics library,OpenInventor[4] of SG I Company is used.
assembly of a virmalmachine-dehitions of
operadngprocedure-definitions of mecahnical pan-display ofa
vinualmachine-making aresponse to users questions or mmmands
3 Assembly training system3.1 System configurationThis system
consists of 3 parts including an assembly of avirtual machine,
spoken language processing unit, and non-verbal behavior analysis
unit. We summa rize the m ain facilityof each part in Figure 2. We
describe each function in de taillater.
-speech recognition -analysis ofhand position
commandsquesrions non-verbal behavior
Figure 2. System co nfiguration3.2 Verbal/ non-verbal
interfaceIn this system, we used the interface that a user could
inputspoken language and non-verbal behavior
simultaneously.Consequently, a user has only to utter toward a
microphone incase issuing voice input without any keyboard action.
Theoperation method peculiar to this interface is shown in
thefollowing.
With a traditional interface, the unique name must be usedin
order to distinguish the object from others. But whenthere are many
same objects like mechanical parts, It isdifficult to designate one
of them using the name. This is,however, easily realized simply by
pointing or grasping theobject. A user can speak to the system by
inputting the sp okenlanguage such as Install this part on that.
while pointing at
the two objects with a data glove.
* A user will need not me morize the identifier of object
partsby admitting the use of the directive. A user is able to
orderthe system to do assembly operation. If we should want
tointerrupt the operation while the system is executing anassembly
operation, we could have the system suspend theoperation by issuing
a phrase or sentence that means thesuspension of the op
eration.
3.3 Model of mechanical partThe model of mechanical part at the
initial state of assemblyis shown in Figure 3.
support lineFigure 3. Initial status of assembly
3.4 Definitions of operating procedureIn this system, the
operating procedure (AND/OR procedure)is defined with an AND/OR
graph as shown in figure 4.Hereafter, we call the part a mvobject
which has a componentto be moved after a user has selected it with
a data glove orvoice input, and the partner part a basic part into
which themvobject is installed. Each node in the AND/OR graph
shownin Figure 4, for examples START, END and points from 1 to
8,express an assembly status of the give assembly.Assembly
operation along an arc of the graph (operation) isnecessary in
order to change the state of the assembly. Inoperation, operating
instruction and the object parts (mvo bject,basic part) are
described.Al l nodes of the AND/OR procedure shown in Figure
4consists of OR nodes. In other words, a user has only
tosequentially follow the graph from the upper part toward the
IV- 17 1
-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
3/6
lower part. For example, assembly procedure such as [START- 1-5
- END], [START - 3-8 - END] shows one procedure.
Figure 4. Operating procedure based on AND/OR graph
3.5 Definitions of mechanical partIn this system mechanical
parts are defined with a SceneGraph [4] as shown in figure 5.A
MyParts is data node. Apart name and a part number are described in
the MyParts. Apart name corresponds w ith the voice input from a
user. A partnumber is used for describing the object part in the
AND/ORprocedure.
MyPartsDataNodes:name key shaft:number 2
@ @ 9paratorTransform Material,
Coodinate FaceSetMyParts :definition of a part name and a part
numberTransform : definition o f a part positionCoordinate, FaceSet
: definition of a part shape
Figure 5. Definition of mechanical part3.5 Selection/ operation
of partsIn selection of parts, the system is provided with the
methodto orally input a part name, or the method to grasp or point
tothe object with a data glove in a virtual reality system.
On teaching of the assembly , it is important to get a
usersimula te the assembly operation using data glove.But if the
system shows the user how to move the specifiedobject from the
initial state to the completion status of theassembly operation, we
think it to be helpful enough for theuser to realize the same
operation. So we prepare a method toallow a user to have the system
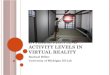
operate the specified object.3.6 Selection of parts with data
glove- When a data glove takes an attitude of pointing at an
objectas shown in the Figure 6, the system decides the part has
beenselected that is nearest to the hand and is included in
theneighborhood of a linear line extended from the forefinger,and
changes the color.
When the palm of the data glove is going to be closed tograsp
the part as shown in the Figure 7, if the bound box ofthe
forefinger and the bound box of the parts interfere eachother, the
system decides that the user has grasped the partand changes the
color again.
Figure 6. Selection of part by pointing action
boundine box ofa data glove
interference ofbouding boxesFigure 7. Selection of parts by
grasping ope ration
Iv- 172
-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
4/6
4. Spoken language process4.1 Natural language processingA
spoken language input from a user (Japanese) is convertedinto a
character string by JULIAN. Next, a natural languageprocessing
program will analyze the character string throughthe speech
recognition and the semantics of the voice isextracted. A user must
register into JULLIAN the words andsyntax used in the speech
recognition as had described with2.2. The dictionary made at that
time is also available to thelanguage processing.We show an example
of the word dictionary anddictionary in Figure 8an d Figure 9.
##An o bje ct of o p e r a t i o h S e m a n t i c s of
category%OBJ . category name
bf ---------+The word to be reco gn ized& R $ % F-
##Method of operation (- ab)%OPV-Ai%?+GT@!lHbf
##The end of a verb (imperative)%AUX-A57 . 2 l
##Particle (e)%W O-32
Intax
Figure 8.A part of dictionaryThe syntax rule is registered
assuming the categoriesregistered in the dictionary to be
non-terminal sym bols.
OBJ WO OPV-A AUX-AOPV-A AUX-A OBJ WO
Figure 9. A part of syntax d ictionarySemantic analysis is done
in top-down fashion. When asentence Assemble the hexagon head bolt.
( ,ffi$lb F-&?+GT . is input, the input sentence is matched to
the
syntax OBJ W O OPV-A AUX-A in the syntaxdictionary, and a
category shown in the Figure 10 is obtained.Because a category is
registered corresponding to a functionof a word, semantics of the
word becom es possible.At this time whether the content of the
sentence can behandled with the system or not is judged. To
increase anumber of sentences to be understood, you have only to
addwords belonging to a category or categories and syntax
rules.Inversion expression and more than one expression can bealso
accepted. The second rule in syntax rules shown in theFigure 9 is
the inversion form of the first syntax rule. Theflow of the process
is shown in Figure 10.
Recognition Syntax rule
*HPV-ASematics ofcategory
Method of operation (- $y)I The end of a verb(imperative) I
Figure 10. A result of language processing
4.2 Constructing the contents of dialogAn analysis result
provided with the natural languageprocessing exploits the knowledge
of assembly, and is storedin a list called a contents list. When
Assembled hexagonhead bolt.(&@!$& b %%f145T3. is a
recognizedcharacter string, a contents list as shown in the Figure
11 ismade.
I order 1 operation I
Figure 11. Contents list
Key words corresponding to the contents of the sentencestored in
the first line of the contents list. The systemdistinguishes the
contents of the utterance with the key words.If some assembly
operation is necessary, a method realizingthe operation is put in
the second line, and the object isentered in the 3rd and the 4th
line. Because two parts aremainly selected as objects of one
operation, the 3rd and the
IV--173
-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
5/6
4th line are prepared.4.3 Estimationof a contents listThe system
makes an appropriate response by matching acontents list with
information about the assembly at hand. Asthis process depends on
the contents of the utterance, we willexplain it in detail while
showing typical examples in the 5thsection.4.4. Flow of process.We
describe the flow of process of spoken language in thefollowing. At
first, a user issues an inquiry or command to thesystem using a
spoken language. Making natural languageprocessing on the spoken
language next, If the system is ableto accept the contents, a
contents list is made. Otherwise, theuser must repeat the voice
input. W hen a contents list is made,the system matches the
contents with the information aboutthe current assembly and makes a
response.
5 Examplesof interactionTwo interaction examples are shown.
These examples showverbal/ non-verbal communication with human
being and acomputer system typically.5.1 The Example a user asks
the system about a part nameA user can ask the system about a part
name pointing at a partwith data glove. If a part is selected with
a data glove, thesystem gets the MyParts (Figure 5 ) of the
selected part. Thenthe system teaches the user the part name
described in theMyParts.Typical interaction examples are shown i n
the following.A user points at a bearing (holder) with a data glove
whilesaying, What is t h i s ? ( Z ; h k k ~ T ~ d ~ . .As a result
aresponse This is a holder. is generated.Figure 12 shows an
interaction contents list made then.Figure 13 shows the
circumstance the holder is pointed atwith a data glove.
I order I operation II oqeration 1 ~ ; h Iobectl nothinobject2
nothingFigure 12.The co ntents list of dialog
Figure 13. The circumstance the key shaft is pointed at5.2 The
example a user has the system to operate a partIf operating
instruction and an object are given to the system,it performs
assembly.When an operation command is given from a user, the
systemmatches the operation described in the AND/OR procedureshown
in 3.4 to the contents list of the given utterance, and arespon se
is made. If the operation comm and fits the operationin the AND /OR
graph, the operation is performed. When theoperating instruction is
wrong, a response T he givenoperation is wrong because it is
impossible to cany it out. isgenerated.When an operating
instruction is right but a part to beoperated is w rong, a
response, The part to be operated iswrong. is generated. If there
are several parts with the sam ename as the object designated with
voice input, the systemexecutes the given instruction on finding an
instance of th eoperational part.
Typical interaction examples are shown in the following.In the
assembly shown in the Figure 15, let assume that theuser grasps a
bearing (holder) with a data glove while saying
Install this part . (L$l??~c?($kf3. ) As a result thesystem
replied as follows.Figure 14 shows an interaction contents list
made then.Figure 15 shows the circumstance the bearing is grasped
witha data glove.Figure16 shows the situation the bearing has been
completelyinstalled.
N - 17 4
-
8/3/2019 Interaction With Virtual Environment Using Verbal
Non-Verbal Communication
6/6
orderoperationobject1objec 2
Figure 15. Grasp of a part with a data g love
operationfx0 ($tj-rtLnothing
Figure 16. A situation the bearing is p erfectly installed.As a
given operation command fits the operation described inthe AND/OR
procedure, the system performed th e installationoperation of the
bearing.6 ConclusionIn this research, verball non-verbal
communication betweenhuman and a computer system in virtual space
is proposed. Asa concrete example, we have applied it to the field
of themechanical assembly domain.The system accepts questions/
command from a user in aspoken language and is successful in the
correct interpretationof the users intention and maintenance of the
com municationbetween the user and the system. Using the
non-verbaloperation such as a pointing action, a user was able to
point
out an object simply.Because there is no depth feeling in the
virtual space used inthe system, it is often difficult for a user
to grasp or point toan object using a data glove.The way a user
instructs a system to assemble a virtualmachine has be en mainly
reported in this paper.We have already reported the way a system
watches a usersbehavior while he/she is assembling a virtual
machine. But asystem simply points at the part erroneously
operated, anyinstruction was not given to the user. An avatar
shouldperform this instruction along with the explanation in
voicewith manipulating mechanical parts.In the same way, for
questions from a user, the avatar mustanswer with a gesture and a
spoken language.If the bi-directional verbal/ non-verbal
communication c an berealized, a user has only to imitate the
avatars action.This means that mutual comprehension w ill be
promoted.
6 References
[l ] Norihiro Abe and Saburo Tsuji A consulting systemwhich
detects and undoes erroneous operations by novicesProc. of SPIE,
pp.352-358, (10 1986)[2] Norihiro Abe, Tomohiro Amano, Kazuaki
Tanaka,J.Y.Zheng, Shoujie He, and Hirokazu Taki A TrainingSystem
for Detecting Novices Erroneous Operation inRepairing Virtual
Machines International Conference onVirtual Reality and
Tele-Existence(ICAT), pp.224-229,( 1997)[3] Norihiro Abe,
J.Y.Zheng, Kazuaki Tanaka and HirokazuTaki A training System using
Virtual Machines forTeaching Assembling/ Disassembling Operations
to NovicesInternational Conference on System, Man
andCybemetics,pp.2096-2101 (1996)[4] J,WerneckePublishing Company
(1994)
The Inventor Mentor, Addison Wesley
[5] Norihiro Abe, Atsushi W ada, Kazuaki Tanaka, J.Y.Zheng,Shou
jie He and Hirokazu Taki Verification ofAssembability of Mechanical
Parts and Visualization ofMachinery of Assembly in Virtual Space
InternationalConference on Virtual Reality and Tele-Existence
(ICAT),pp.208-215, (1997)
Iv-175