Embed Size (px)
Citation preview
ACTIVE MATERIALS AND INTELLIGENT STRUCTURES
PAOLO GAUDENZI
UNIVERSITA DI ROMA LA SAPIENZA
PART 1
INTELLIGENT STRUCTURES: AN INTRODUCTION1. FOREWORD2. TRADITIONAL AND INTELLIGENT STRUCTURES3 ACTIVE MATERIALS3. ACTIVE MATERIALS4. ACTUATION MECHANISMS5. SENSING MECHANISMS6. CONTROL, MANUFACTURING ASPECTS7. APPLICATION IN SPACE8 A CA O S O G G S8. APPLICATIONS IN OTHER ENGINEERING FIELDS9. COMMERCIAL APPLICATIONS10 ONGOING RESEARCH
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
10. ONGOING RESEARCH11. REFERENCES
1. FOREWORD
IN RECENT YEARS MANY EFFORTS HAVE BEEN PRODUCED TOWARDS ANEW TECHNOLOGY WHICH MIGHT INFLUENCE, ALSO IN THE NEXT FUTURE,THE DEVELOPMENTS OF SCIENCE AND THE PROGRESS IN ENGINEERINGPRACTICE.
THE TECHNOLOGY OF ACTIVE MATERIALS AND OF INTELLIGENT (SMART)STRUCTURES AIMS AT INCORPORATING INTELLIGENCE AND LIFEFEATURES INTO THE MICROSTRUCTURE OF THE MATERIAL SYSTEM TOFEATURES INTO THE MICROSTRUCTURE OF THE MATERIAL SYSTEM TOREDUCE MASS AND ENERGY AND PRODUCE ADAPTIVE FUNCTIONALITY.
SUCH ENGINEERING SYSTEMS WHICH SHOULD BE ABLE TO PERFORM ASSUCH ENGINEERING SYSTEMS, WHICH SHOULD BE ABLE TO PERFORM ASTHE BIOLOGICAL SYSTEMS ALREADY PRESENT IN NATURE, SHOULD BEABLE TO OPERATE SEVERAL FUNCTIONS: SENSING, ACTUATION, CONTROL.
OF COURSE THEY ALSO SHOULD BE ABLE TO RESIST EXTERNAL ACTIONSAND KEEP THEIR GEOMETRY IN THE FRAME OF ASSIGNED LIMITS.
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
1. FOREWORD (2)
THE SENSORIAL AND ACTUATION CAPABILITY SHOULD BE PERFORMED BYACTIVE MATERIALS SUCH AS PIEZOCERAMICS, SHAPE MEMORY ALLOYS ORMAGNETOREOLOGICAL FLUIDS.
SUCH MATERIALS ARE ABLE TO ESTABLISH INTERACTIONS BETWEEN THEMECHANICAL FIELD AND ANOTHER FIELD OF THEIR PHYSICAL BEHAVIORMECHANICAL FIELD AND ANOTHER FIELD OF THEIR PHYSICAL BEHAVIOR(AS THE ELECTRIC OR THE MAGNETIC ONE).
BY MEANS OF THIS INTERACTIONS BOTH ACTUATION AND SENSINGBY MEANS OF THIS INTERACTIONS BOTH ACTUATION AND SENSINGCAPABILITIES CAN BE STIMULATED BY MEANS OF EXTERNAL (NOTMECHANICAL) ACTIONS.
THE PRESENT COURSE AIMS AT DESCRIBING AND INVESTIGATING ABOUTTHESE FUNDAMENTAL MECHANISMS AND THEIR POTENTIAL APPLICATIONSIN ENGINEERING PRACTICE BY MEANS OF THE ILLUSTRATION OF EITHERIN ENGINEERING PRACTICE BY MEANS OF THE ILLUSTRATION OF EITHERTHEORETICAL ANALYSES AND EXPERIMENTS PERFORMED ON MATERIALSTHEMSELVES AS WELL AS ON INTELLIGENT STRUCTURES IN WHICH THEMATERIAL PLAYS THE ROLE OF THE ACTIVE PART OF THE SYSTEM
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
MATERIAL PLAYS THE ROLE OF THE ACTIVE PART OF THE SYSTEM.
1. FOREWORD (3)
QUESTIONS TO BE ANSWERED AND PROBLEMS TO BEADDRESSEDADDRESSED:
1. WHAT ARE INTELLIGENT STRUCTURES?
2. WHY ARE THEY IMPORTANT IN ENGINEERING PRACTICE?
3. WHICH ARE THE MAIN CONSTITUENTS (ELEMENTS) OF ANINTELLIGENT STRUCTURE?
4. WHAT ABOUT POSSIBLE APPLICATIONS OF INTELLIGENTSTRUCTURES IN SPACE? HAVE THEY FLOWN YET? (ABOUT ONSTRUCTURES IN SPACE? HAVE THEY FLOWN YET? (ABOUT ONORBIT EXPERIMENTS)
5. WHAT ABOUT APPLICATIONS IN CIVIL, MECHANICAL OR OTHER,FIELDS OF ENGINEERING?
6. ARE THERE COMMERCIAL APPLICATIONS AVAILABLE?
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
2. TRADITIONAL AND INTELLIGENT STRUCTURES
2.1 TRADITIONAL CONCEPT OF ˆSTRUCTURE˜ˆSTRUCTURE˜
CAPABILITY OF RESISTING EXTERNAL ACTIONS AND TRANSFERRINGLOADS WITHOUT ATTAINING THE FAILURE OF THE MATERIAL.
RESPECTING KINEMATIC AND DYNAMIC CONSTRAINTS.
DESIGN, ANALYSIS, CONSTRUCTION, MAINTENANCE AND REPAIR OF ASTRUCTURE ARE USUALLY VIEWED WITHIN THE ABOVE FRAME.
SAFETY AND RELIABILITY, CONSIDERED VERY IMPORTANT, ARE DEALTWITH BY MEANS OF THE FACTOR OF SAFETY CONCEPT.
THE ˆTRADITIONAL˜ STRUCTURE IS USUALLY PASSIVE (SAME CONSTANTCHARACTERISTICS OF RESPONSE) AND HAS NO MEANS OF DETECTING ITSOWN STATE OR THE EXTERNAL ACTION
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
OWN STATE OR THE EXTERNAL ACTION.
2. TRADITIONAL AND INTELLIGENT STRUCTURES (2)
2.2 INTELLIGENT STRUCTURES IN NATURE: AN EXAMPLE
THE MUSCULAR SYSTEM OF THE HUMAN BODY HAS:
ADAPTIVITY: CAPABILITY OF MODIFYING ITS CHARACTERISTICS BY MEANSADAPTIVITY: CAPABILITY OF MODIFYING ITS CHARACTERISTICS BY MEANSOF SOME ACTUATION MECHANISM.THE MUSCLES CAN VARY THE ˆSTIFFNESS˜ THAT THEY OFFER TO ANEXTERNAL ACTION IN FACT THEY CAN BE STIFF OR SOFTEXTERNAL ACTION. IN FACT THEY CAN BE STIFF OR SOFT.
SENSORIALITY: CAPABILITY OF GETTING INFORMATIONS ABOUT THEVALUE OF THE EXTERNAL LOAD AND ITS OWN STATUS AS WELL.THE HUMAN BODY IS INDEED CAPABLE OF ESTIMATING EXTERNAL LOADS.
A RATHER COMPLICATED AND MOSTLY UNKNOWN SYSTEM PROVIDES ALSOTHE POSSIBILITY OF CREATING A CONTROL ACTION BY PUTTINGTOGETHER IN AN OPTIMAL FASHION BOTH ACTUATION AND SENSING.
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
TOGETHER IN AN OPTIMAL FASHION BOTH ACTUATION AND SENSING.
2. TRADITIONAL AND INTELLIGENT STRUCTURES (3)
2.2 INTELLIGENT STRUCTURES IN NATURE: AN EXAMPLE (2)
ALSO AT A FIRST DEGREE OF APPROXIMATION A VERY DETAILED MODELFOR SUCH MECHANISMS THAT ARE PRESENT IN OUR MUSCLES SHOULD BESET UP. THE ROLE OF THE SKELETON AND OF THE NERVOUS SYSTEMSHOULD BE POINTED OUT.
ANYWAY A HIGH LEVEL OF INTEGRATION BETWEEN ALL THE DIFFERENTCITED FUNCTIONS AND THE PART OF THE MUSCLES THAT AREPERFORMING THEM CAN BE OBSERVED.
OF COURSE OUR BODY AS ALL LIVING SYSTEMS TRIES TO PERFORM ITSOF COURSE OUR BODY, AS ALL LIVING SYSTEMS, TRIES TO PERFORM ITSFUNCTIONS KEEPING THE REQUESTED POWER AT THE LOWEST LEVELPOSSIBLE, IN OTHER WORDS MINIMIZING THE ENERGY.
SUCH CONCEPTS LEARNT FROM NATURE COULD GIVE US VERYINTERESTING HINTS FOR MAKING MORE CLEAR THE CONCEPT OFINTELLIGENT STRUCTURE
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
INTELLIGENT STRUCTURE.
2. TRADITIONAL AND INTELLIGENT STRUCTURES (4)
2.3 INTELLIGENT MATERIAL SYSTEMS AND STRUCTURES
ADAPTIVITY INTELLIGENTADAPTIVITYSENSORIALITYCONTROL AND ACTIVITYHIGH INTEGRATION LEVELS
INTELLIGENTSTRUCTURES(WADA, FANSON, CRAWLEY)
HIGH INTEGRATION LEVELSTHEY ARE NO MORE PART OF THE SYSTEM, THEY ARE THE SYSTEMITSELFMAIN FEATURES:AUTONOMOUS INTERACTION WITH THEIR ENVIRONMENTCHANGE OF THEIR SHAPEMONITORING THEIR OWN HEALTHVIBRATION CONTROLBEHAVE LIKE MATERIALS THEY ARE NOTBEHAVE LIKE MATERIALS THEY ARE NOT
MAYBE NO ARTIFICIAL INTELLIGENT STRUCTURE HAS ALREADY BEENCONSTRUCTED. MANY PROFITS CAN HOWEVER BE FIGURED OUT JUST
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
CONSIDERING SOME OF THOSE FEATURES AS APPLIED TO A REALSTRUCTURE.
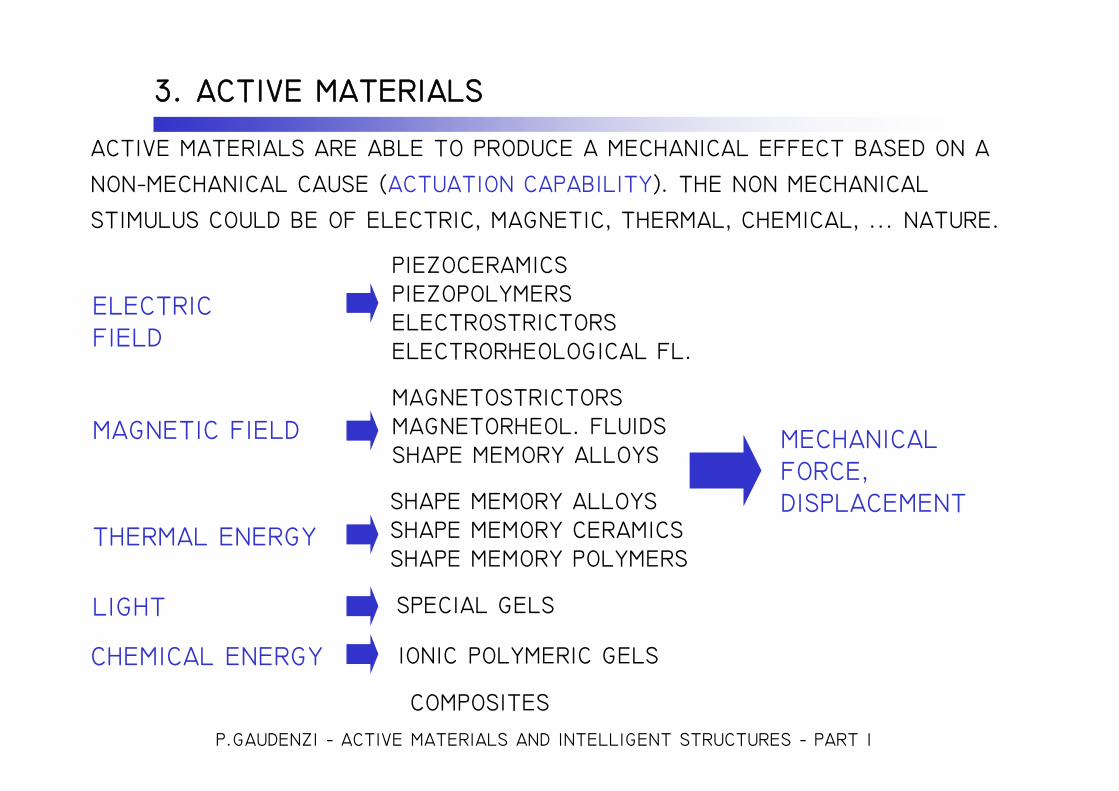
3. ACTIVE MATERIALS
ACTIVE MATERIALS ARE ABLE TO PRODUCE A MECHANICAL EFFECT BASED ON A
NON−MECHANICAL CAUSE (ACTUATION CAPABILITY). THE NON MECHANICAL
STIMULUS COULD BE OF ELECTRIC MAGNETIC THERMAL CHEMICAL NATURESTIMULUS COULD BE OF ELECTRIC, MAGNETIC, THERMAL, CHEMICAL, ... NATURE.
ELECTRIC
PIEZOCERAMICSPIEZOPOLYMERSELECTRIC
FIELDELECTROSTRICTORSELECTRORHEOLOGICAL FL.
MAGNETOSTRICTORS
MAGNETIC FIELDMAGNETOSTRICTORSMAGNETORHEOL. FLUIDSSHAPE MEMORY ALLOYS
MECHANICALFORCE,
THERMAL ENERGY
SHAPE MEMORY ALLOYSSHAPE MEMORY CERAMICSSHAPE MEMORY POLYMERS
DISPLACEMENT
LIGHT
CHEMICAL ENERGY
SPECIAL GELS
IONIC POLYMERIC GELS
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
CHEMICAL ENERGY
COMPOSITES
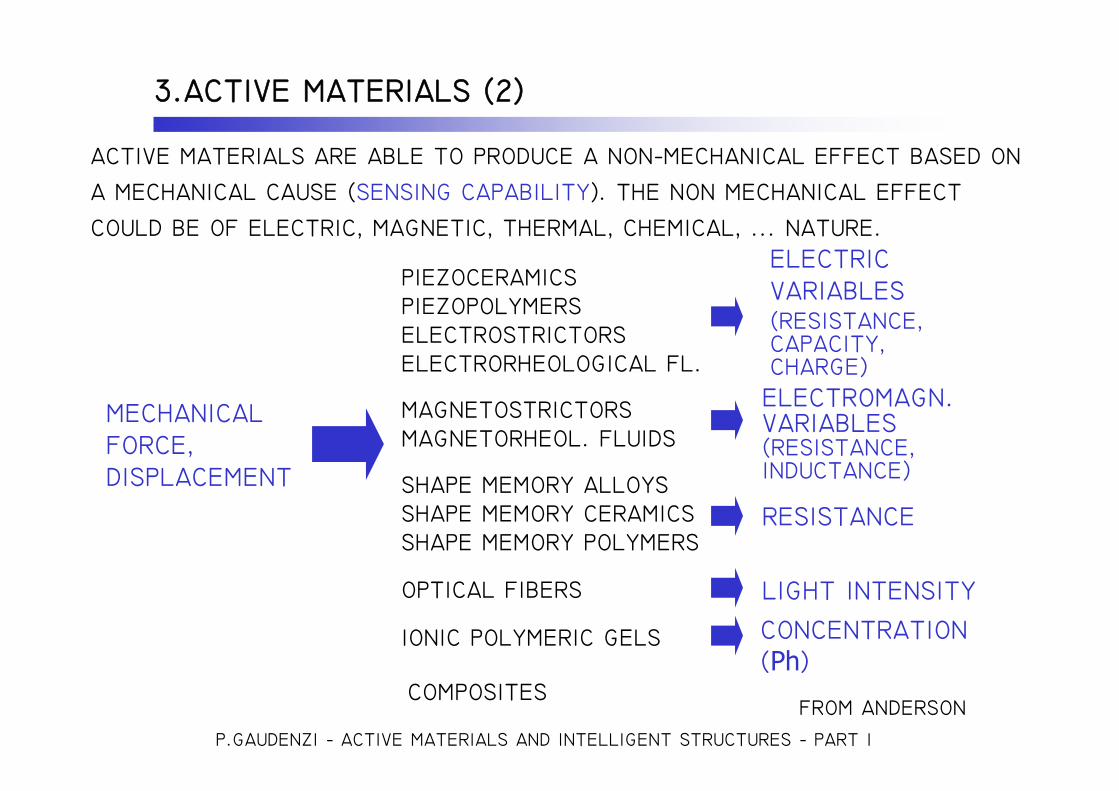
3.ACTIVE MATERIALS (2)
ACTIVE MATERIALS ARE ABLE TO PRODUCE A NON−MECHANICAL EFFECT BASED ON
A MECHANICAL CAUSE (SENSING CAPABILITY). THE NON MECHANICAL EFFECT
COULD BE OF ELECTRIC, MAGNETIC, THERMAL, CHEMICAL, ... NATURE.
PIEZOCERAMICSPIEZOPOLYMERS
ELECTRIC VARIABLES
PIEZOPOLYMERSELECTROSTRICTORSELECTRORHEOLOGICAL FL.
(RESISTANCE,CAPACITY,CHARGE)ELECTROMAGN
MECHANICALFORCE,DISPLACEMENT
MAGNETOSTRICTORSMAGNETORHEOL. FLUIDS
SHAPE MEMORY ALLOYS
ELECTROMAGN. VARIABLES (RESISTANCE, INDUCTANCE)DISPLACEMENT SHAPE MEMORY ALLOYS
SHAPE MEMORY CERAMICSSHAPE MEMORY POLYMERS
RESISTANCE
OPTICAL FIBERS
IONIC POLYMERIC GELS
LIGHT INTENSITY
CONCENTRATION(Ph)
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
COMPOSITES(Ph)
FROM ANDERSON
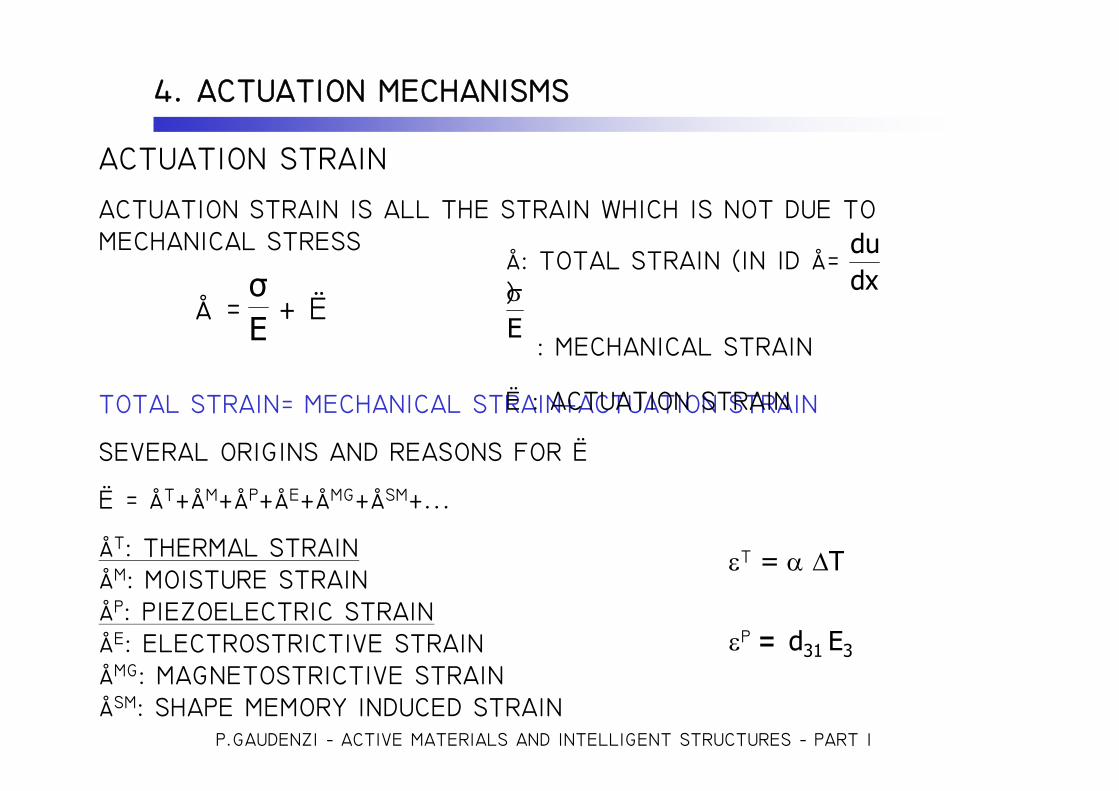
4. ACTUATION MECHANISMS
ACTUATION STRAIN
ACTUATION STRAIN IS ALL THE STRAIN WHICH IS NOT DUE TOACTUATION STRAIN IS ALL THE STRAIN WHICH IS NOT DUE TO MECHANICAL STRESS
å = + Ëdxdu
σ σå: TOTAL STRAIN (IN 1D å= )
å = + Ë
TOTAL STRAIN MECHANICAL STRAIN ACTUATION STRAIN
E E: MECHANICAL STRAIN
Ë ACTUATION STRAINTOTAL STRAIN= MECHANICAL STRAIN+ACTUATION STRAIN
SEVERAL ORIGINS AND REASONS FOR Ë
Ë : ACTUATION STRAIN
Ë = åT+åM+åP+åE+åMG+åSM+...
åT: THERMAL STRAINåM MOISTURE STRAIN
εT = α ΔTåM: MOISTURE STRAINåP: PIEZOELECTRIC STRAINåE: ELECTROSTRICTIVE STRAINåMG
εP = d31 E3
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
åMG: MAGNETOSTRICTIVE STRAINåSM: SHAPE MEMORY INDUCED STRAIN
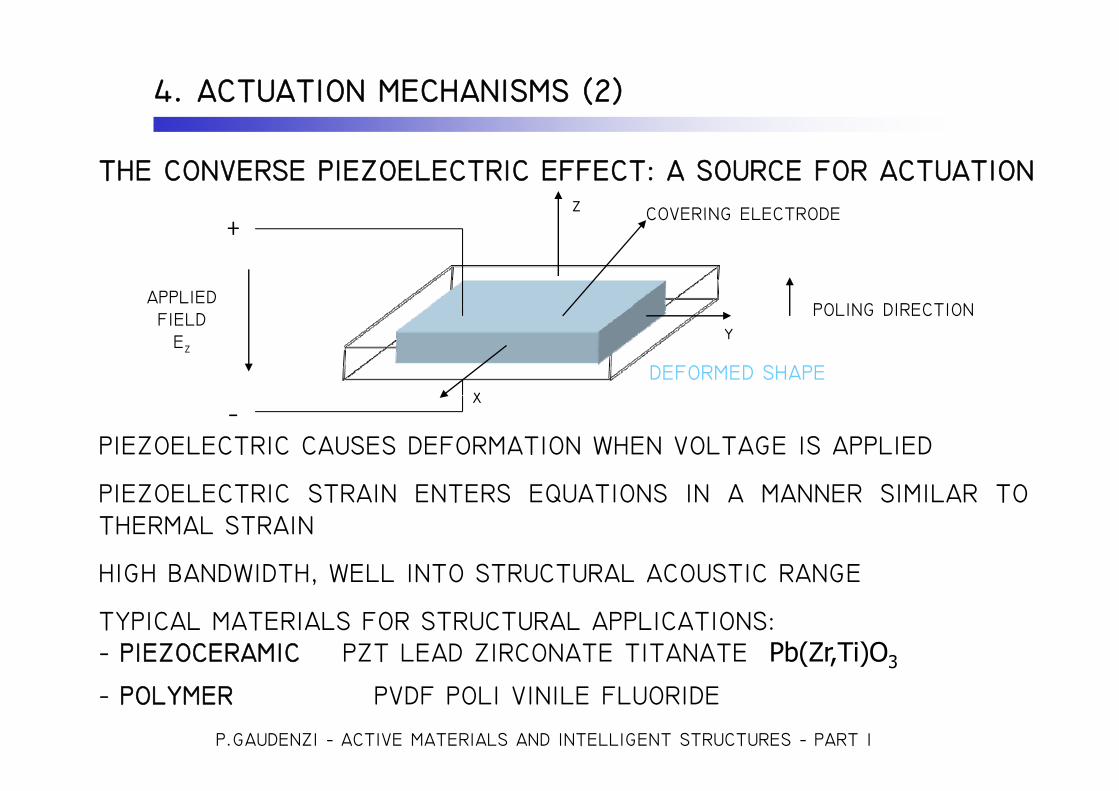
4. ACTUATION MECHANISMS (2)
THE CONVERSE PIEZOELECTRIC EFFECT: A SOURCE FOR ACTUATIONz COVERING ELECTRODE
APPLIED
COVERING ELECTRODE+
POLING DIRECTION
DEFORMED SHAPE
FIELDEz
y
x
POLING DIRECTION
PIEZOELECTRIC CAUSES DEFORMATION WHEN VOLTAGE IS APPLIED
PIEZOELECTRIC STRAIN ENTERS EQUATIONS IN A MANNER SIMILAR TO
x−
PIEZOELECTRIC STRAIN ENTERS EQUATIONS IN A MANNER SIMILAR TOTHERMAL STRAIN
HIGH BANDWIDTH WELL INTO STRUCTURAL ACOUSTIC RANGEHIGH BANDWIDTH, WELL INTO STRUCTURAL ACOUSTIC RANGE
TYPICAL MATERIALS FOR STRUCTURAL APPLICATIONS:− PIEZOCERAMIC PZT LEAD ZIRCONATE TITANATE Pb(Zr,Ti)O3
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
( , ) 3
− POLYMER PVDF POLI VINILE FLUORIDE
4. ACTUATION MECHANISMS (3)
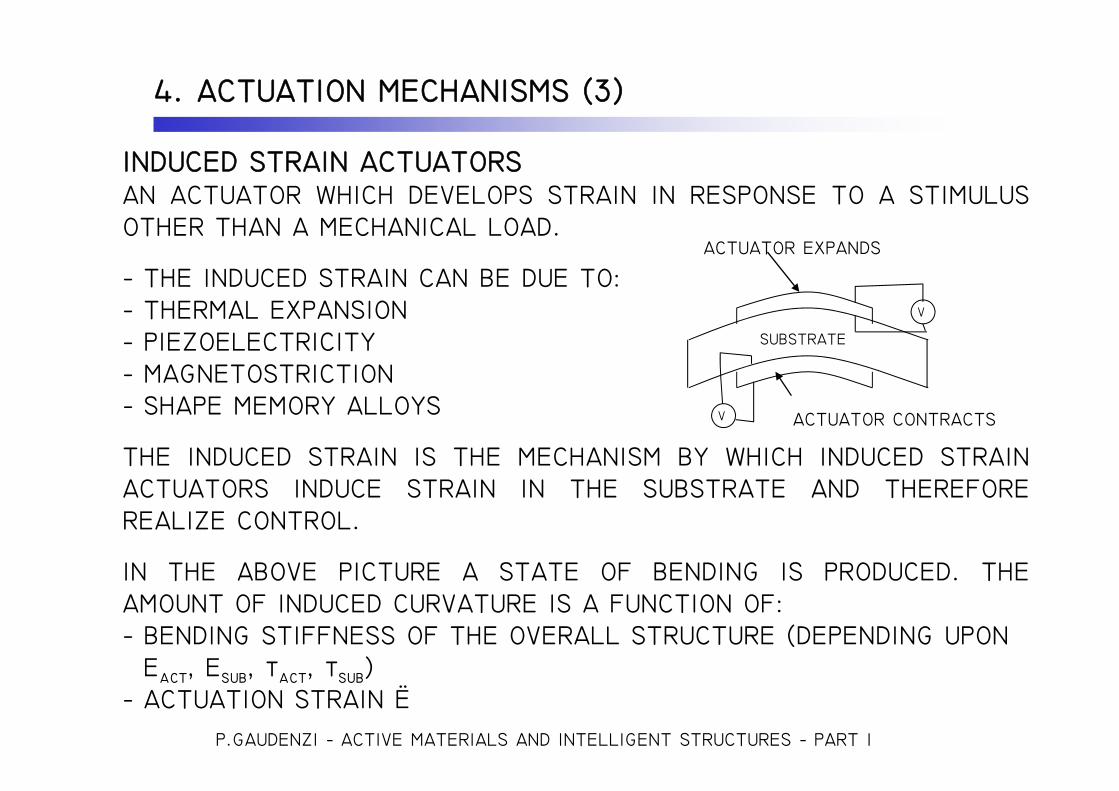
INDUCED STRAIN ACTUATORSAN ACTUATOR WHICH DEVELOPS STRAIN IN RESPONSE TO A STIMULUSOTHER THAN A MECHANICAL LOAD.
− THE INDUCED STRAIN CAN BE DUE TO:THERMAL EXPANSION
ACTUATOR EXPANDS
− THERMAL EXPANSION− PIEZOELECTRICITY− MAGNETOSTRICTION
V
SUBSTRATE
− SHAPE MEMORY ALLOYS
THE INDUCED STRAIN IS THE MECHANISM BY WHICH INDUCED STRAINACTUATORS INDUCE STRAIN IN THE SUBSTRATE AND THEREFORE
ACTUATOR CONTRACTSV
ACTUATORS INDUCE STRAIN IN THE SUBSTRATE AND THEREFOREREALIZE CONTROL.
IN THE ABOVE PICTURE A STATE OF BENDING IS PRODUCED THEIN THE ABOVE PICTURE A STATE OF BENDING IS PRODUCED. THEAMOUNT OF INDUCED CURVATURE IS A FUNCTION OF:− BENDING STIFFNESS OF THE OVERALL STRUCTURE (DEPENDING UPON
E E t t )
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
Eact, Esub, tact, tsub)− ACTUATION STRAIN Ë
4. ACTUATION MECHANISMS (4)
EULER BERNOULLI BEAM MODEL x
z
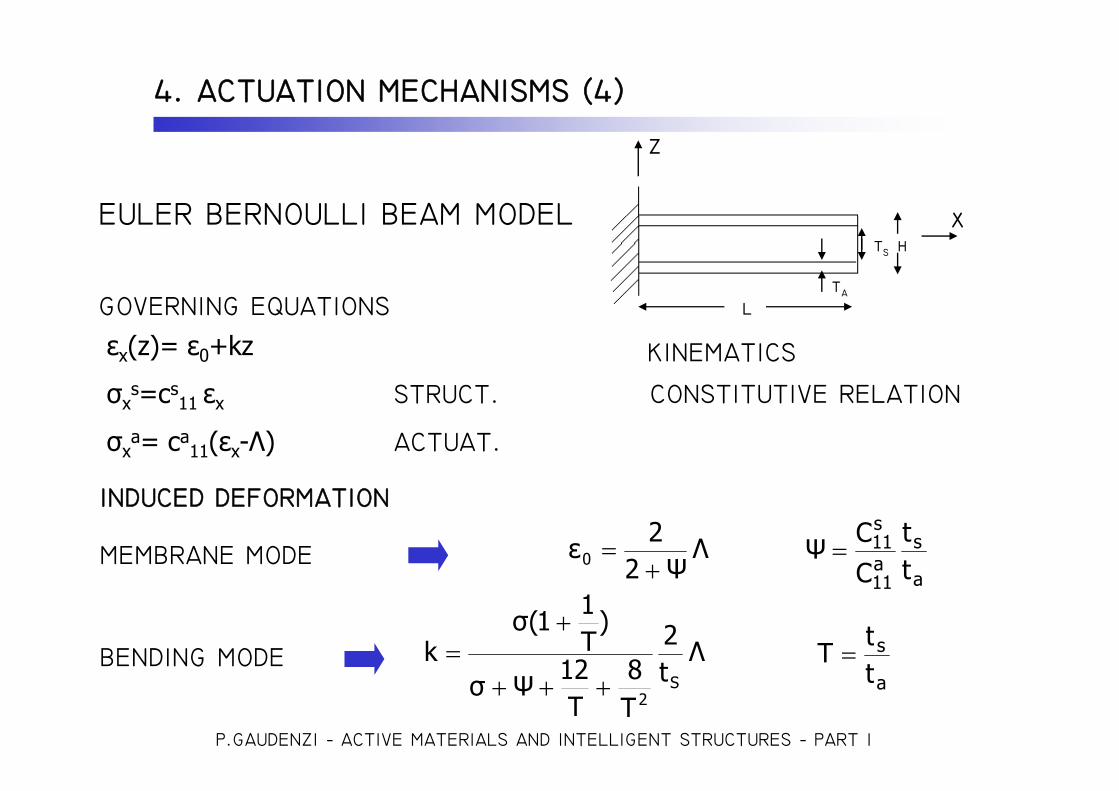
EULER BERNOULLI BEAM MODEL
GOVERNING EQUATIONS
x
l
h
ta
ts
KINEMATICS
CONSTITUTIVE RELATION
εx(z)= ε0+kz
σ s=cs ε STRUCT
GOVERNING EQUATIONS l
CONSTITUTIVE RELATIONσx =c 11 εx STRUCT.
σxa= ca
11(εx-Λ) ACTUAT.
INDUCED DEFORMATION
MEMBRANE MODE ΛΨ2
2ε0 += s
a
s11
tt
CC
Ψ =
BENDING MODE
Ψ2 + a11 tC
Λt2
812
)T1
1(σk
+= s
tt
T =
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
BENDING MODE tT8
T12Ψσ S
2+++ at
4. ACTUATION MECHANISMS (5)
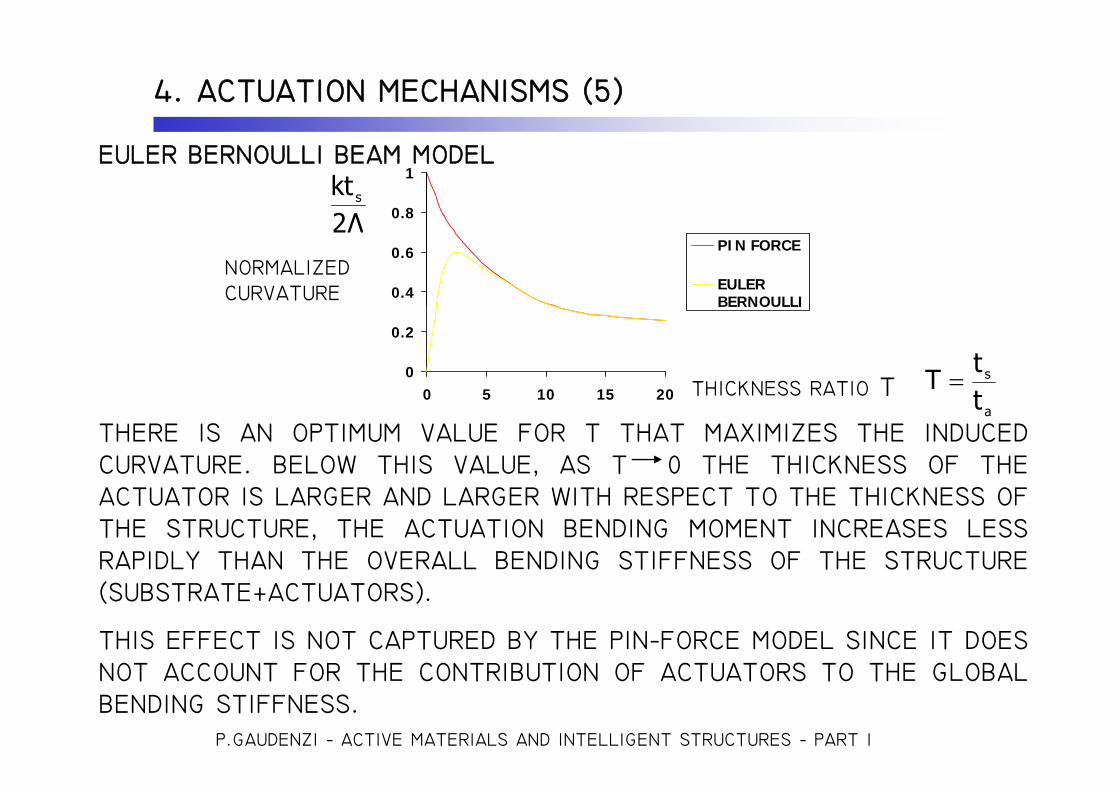
EULER BERNOULLI BEAM MODEL
0.8
1
Λ2kts
NORMALIZED CURVATURE 0.4
0.6
0.8
PIN FORCE
EULERBERNOULLI
Λ2
THICKNESS RATIO T0
0.2
0 5 10 15 20
BERNOULLI
s
tt
T =
THERE IS AN OPTIMUM VALUE FOR T THAT MAXIMIZES THE INDUCEDCURVATURE. BELOW THIS VALUE, AS T 0 THE THICKNESS OF THE
THICKN SS RATIO T0 5 10 15 20at
ACTUATOR IS LARGER AND LARGER WITH RESPECT TO THE THICKNESS OFTHE STRUCTURE, THE ACTUATION BENDING MOMENT INCREASES LESSRAPIDLY THAN THE OVERALL BENDING STIFFNESS OF THE STRUCTURE(SUBSTRATE+ACTUATORS).
THIS EFFECT IS NOT CAPTURED BY THE PIN−FORCE MODEL SINCE IT DOESNOT ACCOUNT FOR THE CONTRIBUTION OF ACTUATORS TO THE GLOBAL
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
NOT ACCOUNT FOR THE CONTRIBUTION OF ACTUATORS TO THE GLOBALBENDING STIFFNESS.
4. ACTUATION MECHANISMS (6)
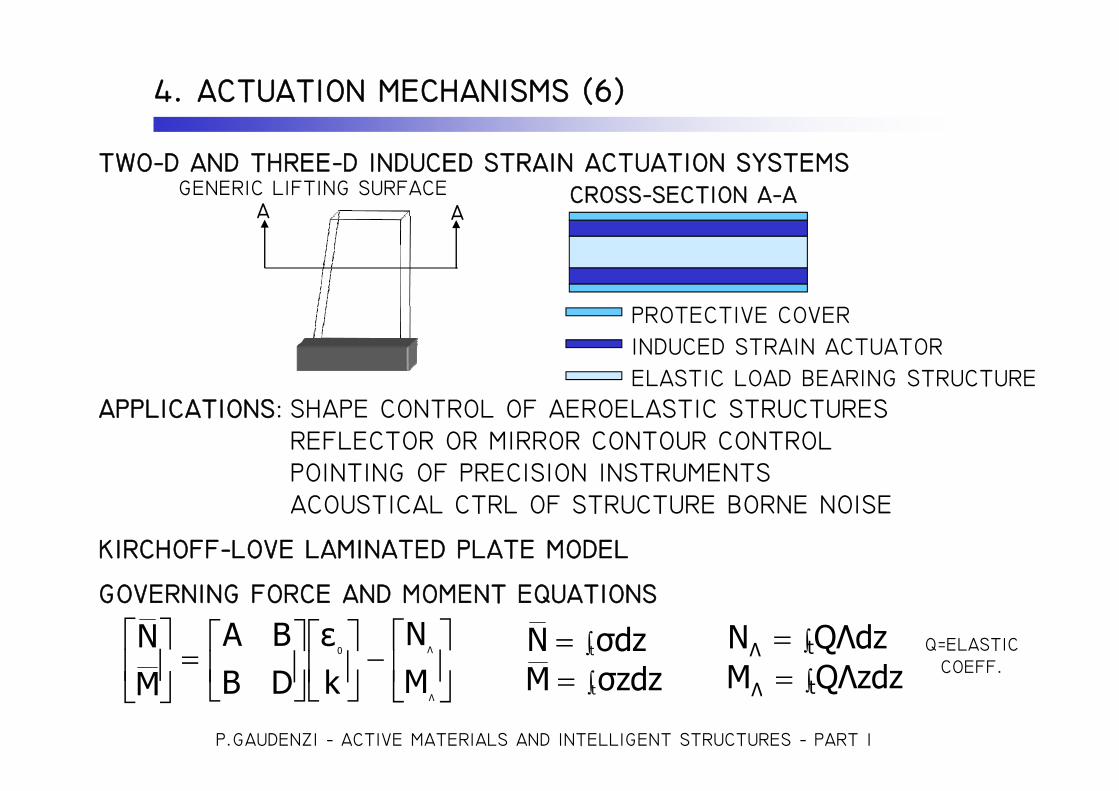
TWO−D AND THREE−D INDUCED STRAIN ACTUATION SYSTEMS GENERIC LIFTING SURFACE
a aCROSS−SECTION A−A
a a
PROTECTIVE COVERINDUCED STRAIN ACTUATORELASTIC LOAD BEARING STRUCTURE
APPLICATIONS: SHAPE CONTROL OF AEROELASTIC STRUCTURESREFLECTOR OR MIRROR CONTOUR CONTROLPOINTING OF PRECISION INSTRUMENTSACOUSTICAL CTRL OF STRUCTURE BORNE NOISE
KIRCHOFF−LOVE LAMINATED PLATE MODEL
GOVERNING FORCE AND MOMENT EQUATIONS
⎥⎤
⎢⎡
−⎥⎤
⎢⎡⎥⎤
⎢⎡
=⎥⎤
⎢⎡
Λ0NεBAN ∫= t dzσN ∫= tΛ dzΛQN
dQQ=ELASTIC
COEFF
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
⎥⎦
⎢⎣
⎥⎦⎢⎣⎥⎦⎢⎣⎥⎦
⎢⎣ Λ
MkDBM ∫= t zdzσM ∫= tΛ zdzΛQM COEFF.
4. ACTUATION MECHANISMS (7)
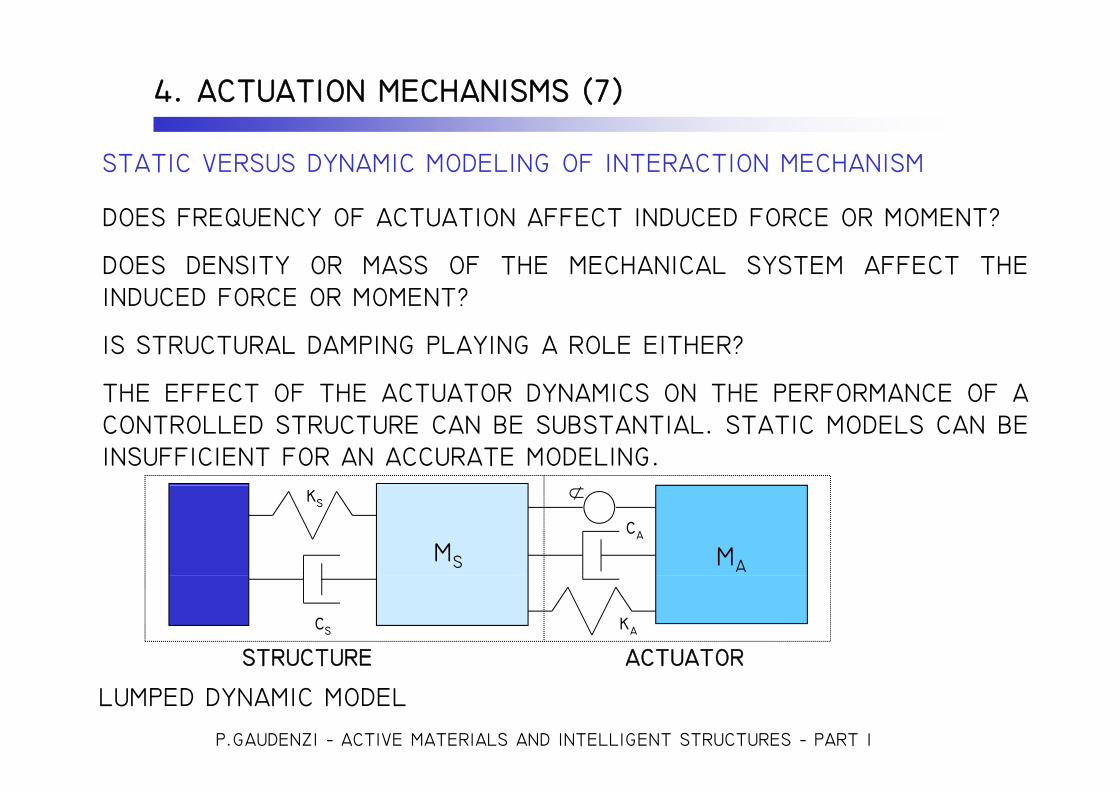
STATIC VERSUS DYNAMIC MODELING OF INTERACTION MECHANISM
DOES FREQUENCY OF ACTUATION AFFECT INDUCED FORCE OR MOMENT?DOES FREQUENCY OF ACTUATION AFFECT INDUCED FORCE OR MOMENT?
DOES DENSITY OR MASS OF THE MECHANICAL SYSTEM AFFECT THEINDUCED FORCE OR MOMENT?INDUCED FORCE OR MOMENT?
IS STRUCTURAL DAMPING PLAYING A ROLE EITHER?
THE EFFECT OF THE ACTUATOR DYNAMICS ON THE PERFORMANCE OF ATHE EFFECT OF THE ACTUATOR DYNAMICS ON THE PERFORMANCE OF ACONTROLLED STRUCTURE CAN BE SUBSTANTIAL. STATIC MODELS CAN BEINSUFFICIENT FOR AN ACCURATE MODELING.
MAMS
ks
ca
⊄
STRUCTURE ACTUATOR
kacs
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
LUMPED DYNAMIC MODEL
STRUCTURE ACTUATOR
5. SENSING MECHANISMS
PIEZO SENSORx3
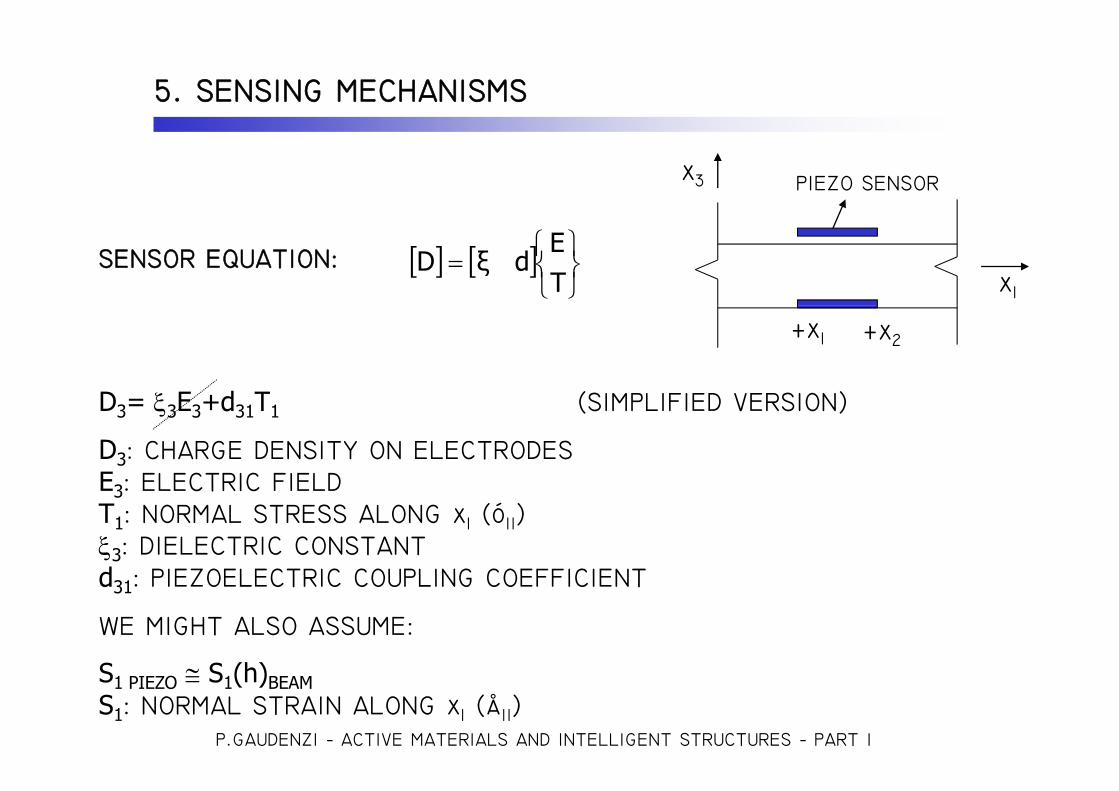
SENSOR EQUATION: [ ] [ ]⎭⎬⎫
⎩⎨⎧
=TE
dξDx1
D ξ E +d T (SIMPLIFIED VERSION)
+x1 +x2
D3= ξ3E3+d31T1 (SIMPLIFIED VERSION)
D3: CHARGE DENSITY ON ELECTRODESE3: ELECTRIC FIELDE3: ELECTRIC FIELDT1: NORMAL STRESS ALONG x1 (ó11)ξ3: DIELECTRIC CONSTANTd : PIEZOELECTRIC COUPLING COEFFICIENTd31: PIEZOELECTRIC COUPLING COEFFICIENT
WE MIGHT ALSO ASSUME:
S S (h)
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
S1 PIEZO ≅ S1(h)BEAMS1: NORMAL STRAIN ALONG x1 (å11)
5. SENSING MECHANISMS (2)
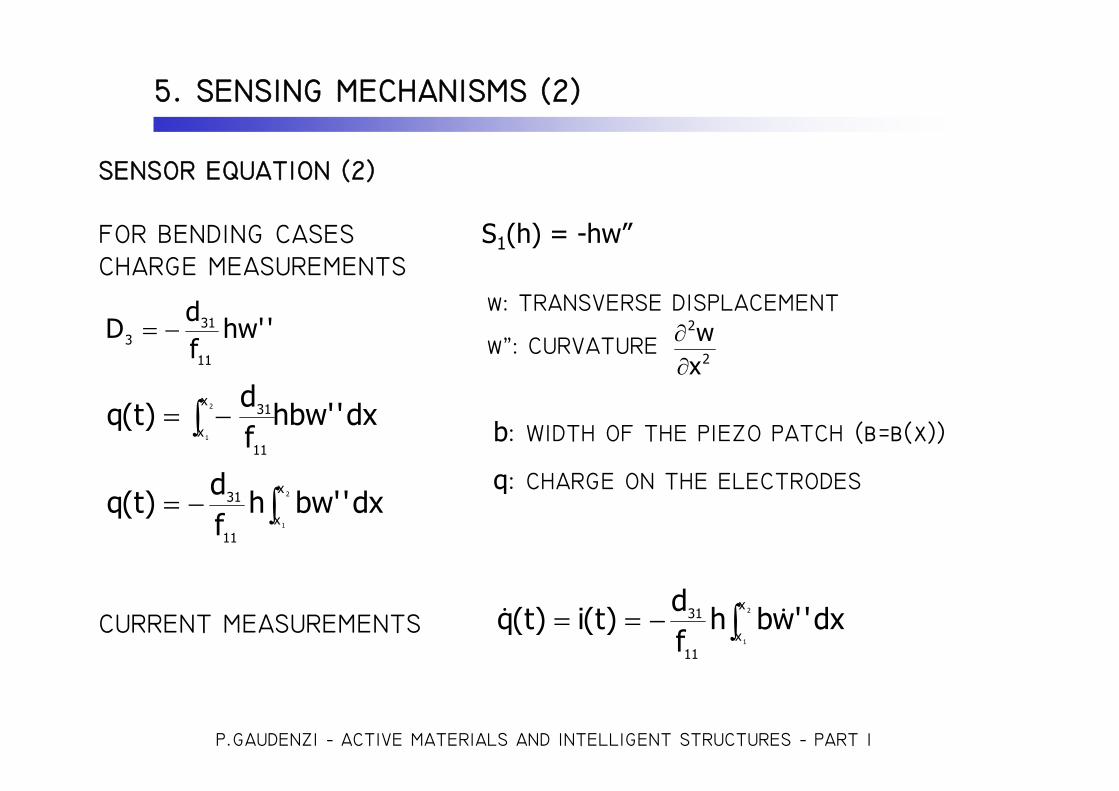
SENSOR EQUATION (2)
FOR BENDING CASES S1(h) = -hw”CHARGE MEASUREMENTS
w: TRANSVERSE DISPLACEMENTd w: TRANSVERSE DISPLACEMENT
w˜: CURVATURE 2
2
xw
∂∂
d
''hwfd
D11
313 −=
dx''hbwfd
)t(q 2
1
x
x11
31∫ −= b: WIDTH OF THE PIEZO PATCH (b=b(x))
q: CHARGE ON THE ELECTRODESd q: CHARGE ON THE ELECTRODES∫−= 2
1
x
x11
31 dx''bwhfd
)t(q
CURRENT MEASUREMENTS ∫−== 2
1
x
x11
31 dx''wbhfd
)t(i)t(q &&
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
6. CONTROL MANUFACTURING ASPECTS
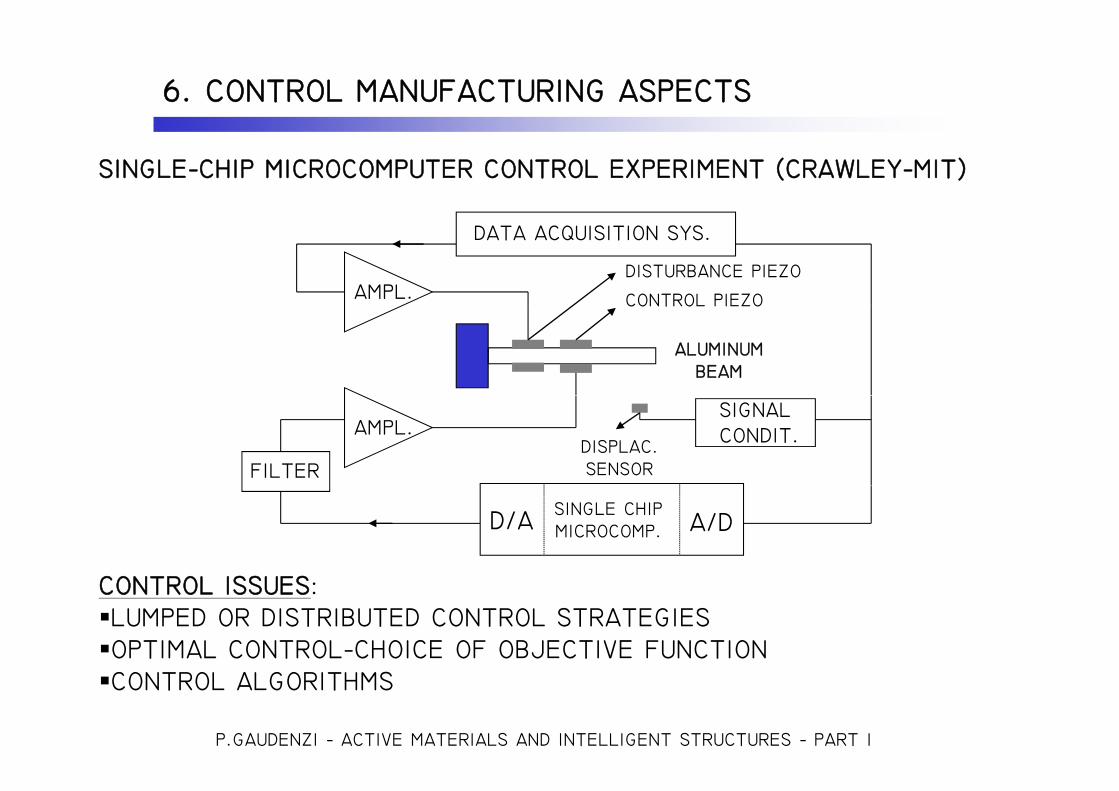
SINGLE−CHIP MICROCOMPUTER CONTROL EXPERIMENT (CRAWLEY−MIT)
AMPL.
DATA ACQUISITION SYS.
DISTURBANCE PIEZO
CONTROL PIEZOCONTROL PIEZO
ALUMINUM BEAM
SIGNAL CONDIT.
FILTER
AMPL.DISPLAC. SENSOR
D/ASINGLE CHIP MICROCOMP. A/D
CONTROL ISSUES:LUMPED OR DISTRIBUTED CONTROL STRATEGIESOPTIMAL CONTROL−CHOICE OF OBJECTIVE FUNCTION
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
CONTROL ALGORITHMS
6. CONTROL, MANUFACTURING ASPECTS
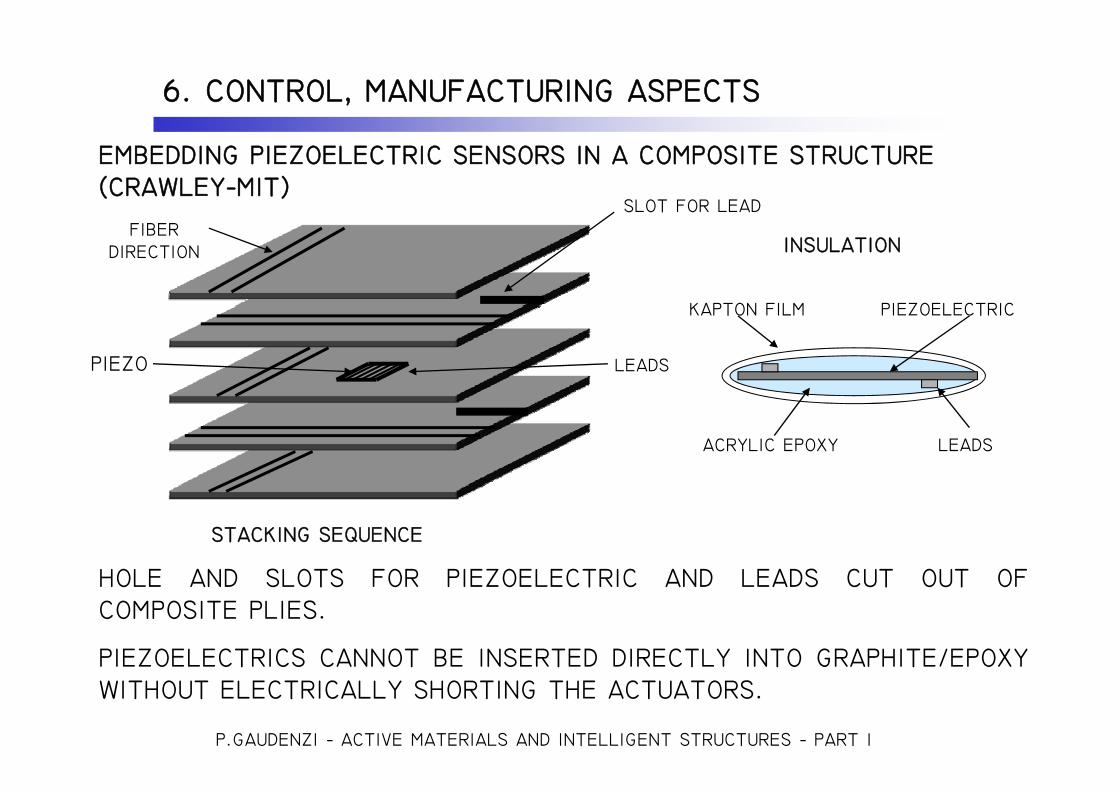
EMBEDDING PIEZOELECTRIC SENSORS IN A COMPOSITE STRUCTURE(CRAWLEY−MIT)
SLOT FOR LEAD
KAPTON FILM PIEZOELECTRIC
INSULATIONFIBER
DIRECTION
KAPTON FILM PIEZOELECTRIC
PIEZO LEADS
ACRYLIC EPOXY LEADS
HOLE AND SLOTS FOR PIEZOELECTRIC AND LEADS CUT OUT OF
STACKING SEQUENCE
HOLE AND SLOTS FOR PIEZOELECTRIC AND LEADS CUT OUT OFCOMPOSITE PLIES.
PIEZOELECTRICS CANNOT BE INSERTED DIRECTLY INTO GRAPHITE/EPOXY
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
PIEZOELECTRICS CANNOT BE INSERTED DIRECTLY INTO GRAPHITE/EPOXYWITHOUT ELECTRICALLY SHORTING THE ACTUATORS.
7. APPLICATION IN SPACE
ADAPTIVE STRUCTURES FOR SPACE WERE DEVELOPED TO CONTROLLARGE PRECISION STRUCTURES, THEY PROVIDE POTENTIAL SOLUTIONS TOMANY OTHER CHALLANGES OF FUTURE LARGE PRECISION AND SMALLINEXPENSIVE SPACE STRUCTURES
1 ROBUST DESIGN1. ROBUST DESIGNRELAX THE CRITICALITY OF CONTROLLING AN OVERWHELMING NUMBEROF PARAMETERS BY PROVIDING A DESIGN ADJUSTABLE DURING THEMISSION TO MEET THE MISSION REQUIREMENTS
2. GROUND TESTINGSS S SALLEVIATE THE NECESSITY OF PRECISELY MEASURING THE ACCURACY OF
THE STRUCTURE IN SPACE THROUGH GROUND TESTING BY PROVIDING THECAPABILITY TO ADJUST THE STRUCTURE TO ITS REQUIREMENTS DURINGITS OPERATION IN SPACE
3. DEVELOPMENT AND SPACE CONSTRUCTION
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
USE ACTIVE MEMBERS TO INCREASE DEPLOYMENT RELIABILITY
7. APPLICATION IN SPACE (2)
4. SYSTEM IDENTIFICATIONRELAX THE CRITICALITY OF CONTROLLING AN OVERWHELMING NUMBEROF PARAMETERS BY PROVIDING A DESIGN ADJUSTABLE DURING THEMISSION TO MEET THE MISSION REQUIREMENTS
5 STATIC ADJUSTMENT5. STATIC ADJUSTMENTOPTIMAL STATIC CORRECTION OF SURFACE ERRORS; OPTIMAL LOCATIONOF ACTIVE MEMBERS TO CORRECT ANTICIPATED STRUCTURALDEFORMATION. THE STRUCTURE CAN LEARN THE CHANGES WITH TIMEAND ADJUST USING FEEDFORWARD APPROACHES
6. VIBRATION ATTENUATION, ISOLATION, SUPPRESION, STEERING ANDPOINTING (VISSP)PROVIDE A VERY QUIET ENVIRONMENT AND STEER OR POINTPROVIDE A VERY QUIET ENVIRONMENT AND STEER OR POINTINSTRUMENTS MOUNTED ON A ˆNOISY AND IMPRECISELY CONTROLLED˜SPACE PLATFORM OR SPACECRAFT.
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
7. APPLICATION IN SPACE (3)
ˆWITHIN THE PAST FEW YEARS, ADVANCEMENTS IN ADAPTIVESTRUCTURES ARE RESULTING IN FLIGHT EXPERIMENTS ANDAPPLICATIONS. IN ALMOST ALL ACTIVITIES, THE ADAPTIVE STRUCTURESASPECTS OF THE FLIGHT EXPERIMENTS ARE VERY SUCCESSFUL.˜
HAVE THEY FLOWN YET? YES! ON ORBIT EXPERIMENTSHAVE THEY FLOWN YET? YES! ON ORBIT EXPERIMENTS:
1.(LAWRENCE, 1990) ADDING DAMPINGDAMPING WAS INCREASED IN THE DYNAMICS OF A 12 MT LONG TRUSSDAMPING WAS INCREASED IN THE DYNAMICS OF A 12 MT LONG TRUSSSTRUCTURE DURING 15−20 SECS OF ˆZERO˜ GRAVITY (NEAR ZERO) AS AKC−135 AIRCRAFT PERFORMS MULTIPLE PARABOLIC TRAJECTORIES.
2.(FANSON, 1993) HUBBLE SPACE TELESCOPEREPLACEMENT OF THE WIDE FIELD PLANETARY CAMERA (WFPC−2): TOASSURE THE PROPER ANGLE OF THE ARTICULATING FOLD MIRROR (AFM)ASSURE THE PROPER ANGLE OF THE ARTICULATING FOLD MIRROR (AFM)THE CAPABILITY OF ACTIVELY ADJUSTING THE TILT POSITION OF THEAFM IN SPACE WAS ADDED. ELECTROSTRICTIVE ACTUATORS ARE THE
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
PRIME MOVERS OF THE AFM.
7. APPLICATION IN SPACE (4)
3.(MILLER, 1996) MIT/NASA MACEFLEW IN THE SPACE SHUTTLE IN MARCH 1995 THE OBJECTIVE IS TOFLEW IN THE SPACE SHUTTLE IN MARCH 1995. THE OBJECTIVE IS TODEMONSTRATE HIGH AUTHORITY ACTIVE STRUCTURAL CONTROL OFFLEXIBLE STRUCTURES IN ZERO GRAVITY CONDITIONS BASED ONANALYSIS GROUND TESTING AND ON ORBIT CONTROL RE DESIGNANALYSIS, GROUND TESTING AND ON−ORBIT CONTROL RE−DESIGN.
4.(BOUSQUET, 1995) CNES/MIRTHE ˆCHARACTERIZATION OF STRUCTURES IN ORBIT˜ (CASTOR) MET ITSOBJECTIVES OF ADDING DAMPING TO TRUSS STRUCTURES USING AXIALACTIVE MEMBERS. THE EXPERIMENT WAS CONDUCTED ON THE MIRSTATION IN THE LATER HALF OF 1996.
FROM WADA
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
8. APPLICATION IN OTHER ENGINEERING FIELDS
1. CIVIL ENGINEERING : SEISMIC ISOLATION, HEALTHMONITORED STRUCTURES (E G BRIDGES)MONITORED STRUCTURES (E.G. BRIDGES)
2. MECHANICAL ENGINEERING: VIBRATION REDUCTION INGENERAL ROBOTICS AUTOMOTIVE APPLICATIONS PUMPSGENERAL, ROBOTICS, AUTOMOTIVE APPLICATIONS, PUMPS
3. NAVAL ENGINEERING: ACOUSTIC REDUCTION (E.G. FORSUBMARINES)SUBMARINES)
4. TELECOMUNICATIONS: SMART SKIN ANTENNAS
5. ELECTRONICS: SMART ELECTRONICS AND MEMS
6 AERONAUTICS: SMART WINGS AND BLADES (AIRPLANES6. AERONAUTICS: SMART WINGS AND BLADES (AIRPLANESAND HELICOPTERS)
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
9. COMMERCIAL APPLICATIONS (1)
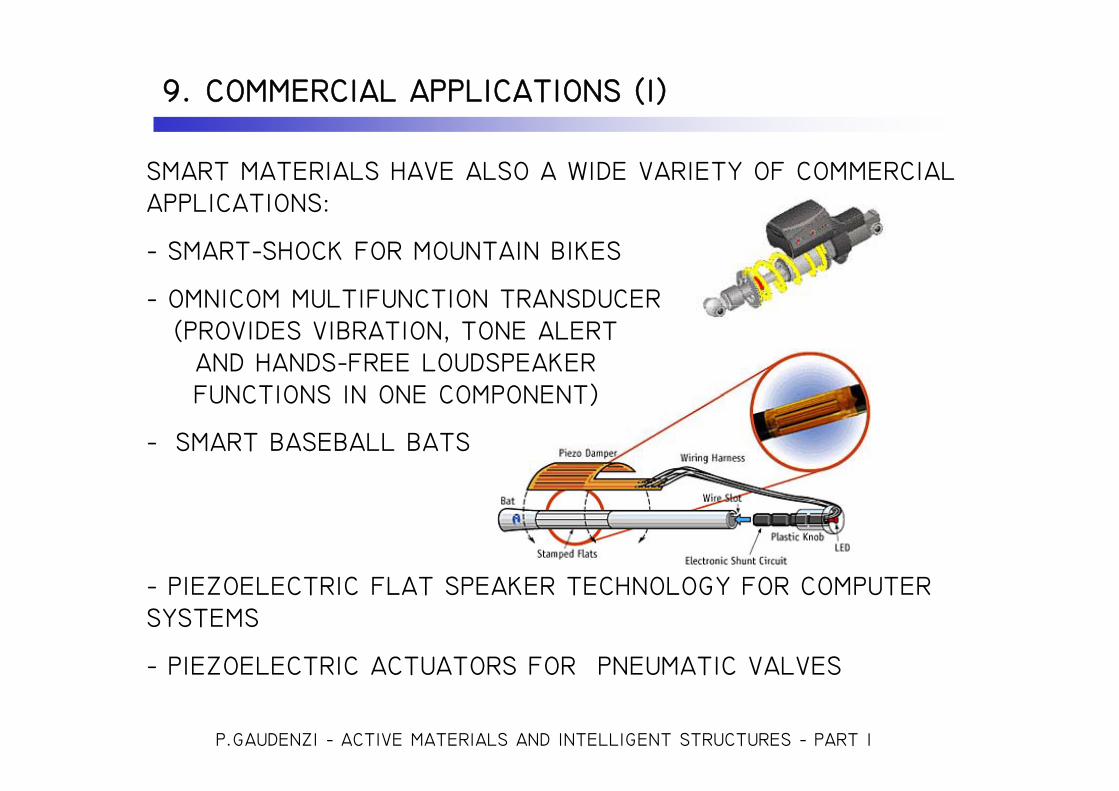
SMART MATERIALS HAVE ALSO A WIDE VARIETY OF COMMERCIAL APPLICATIONS:
− SMART−SHOCK FOR MOUNTAIN BIKES
− OMNICOM MULTIFUNCTION TRANSDUCEROMNICOM MULTIFUNCTION TRANSDUCER(PROVIDES VIBRATION, TONE ALERT
AND HANDS−FREE LOUDSPEAKER FUNCTIONS IN ONE COMPONENT)
− SMART BASEBALL BATS
FUNCTIONS IN ONE COMPONENT)
− PIEZOELECTRIC FLAT SPEAKER TECHNOLOGY FOR COMPUTER SYSTEMS
PIEZOELECTRIC ACTUATORS FOR PNEUMATIC VALVES
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
− PIEZOELECTRIC ACTUATORS FOR PNEUMATIC VALVES
COMMERCIAL APPLICATIONS (2)
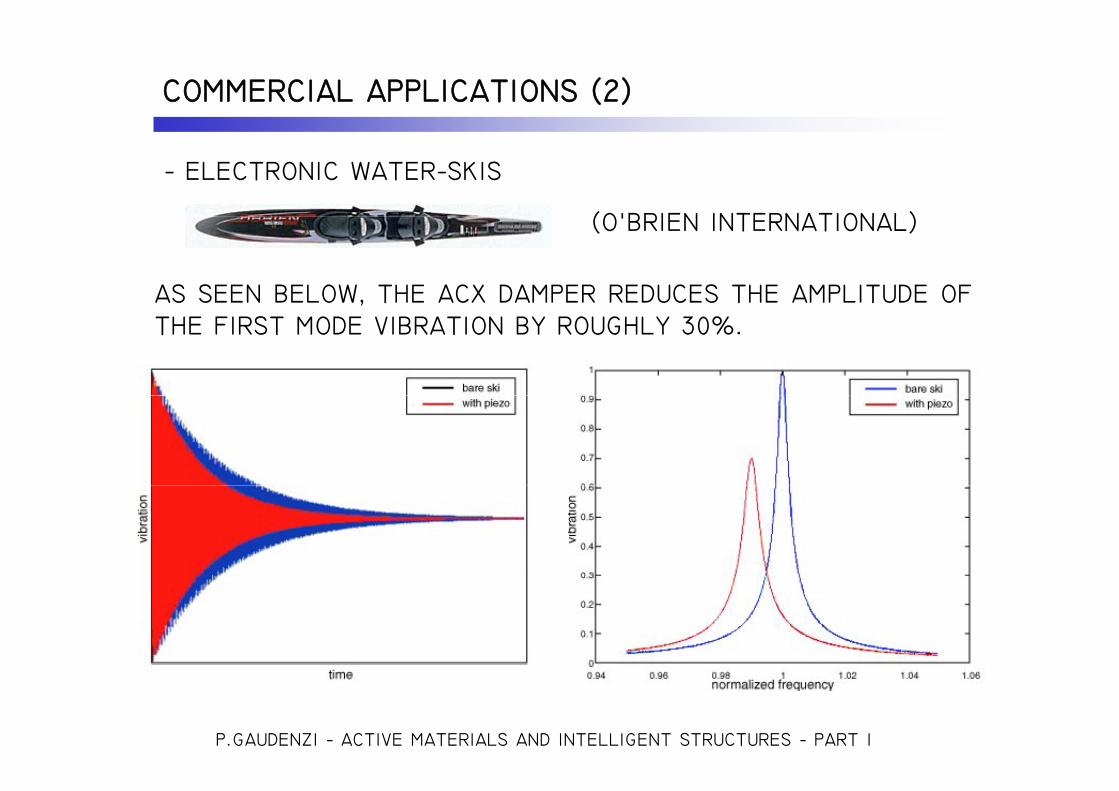
− ELECTRONIC WATER−SKIS
(O’BRIEN INTERNATIONAL)(O’BRIEN INTERNATIONAL)
AS SEEN BELOW, THE ACX DAMPER REDUCES THE AMPLITUDE OFTHE FIRST MODE VIBRATION BY ROUGHLY 30%.
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
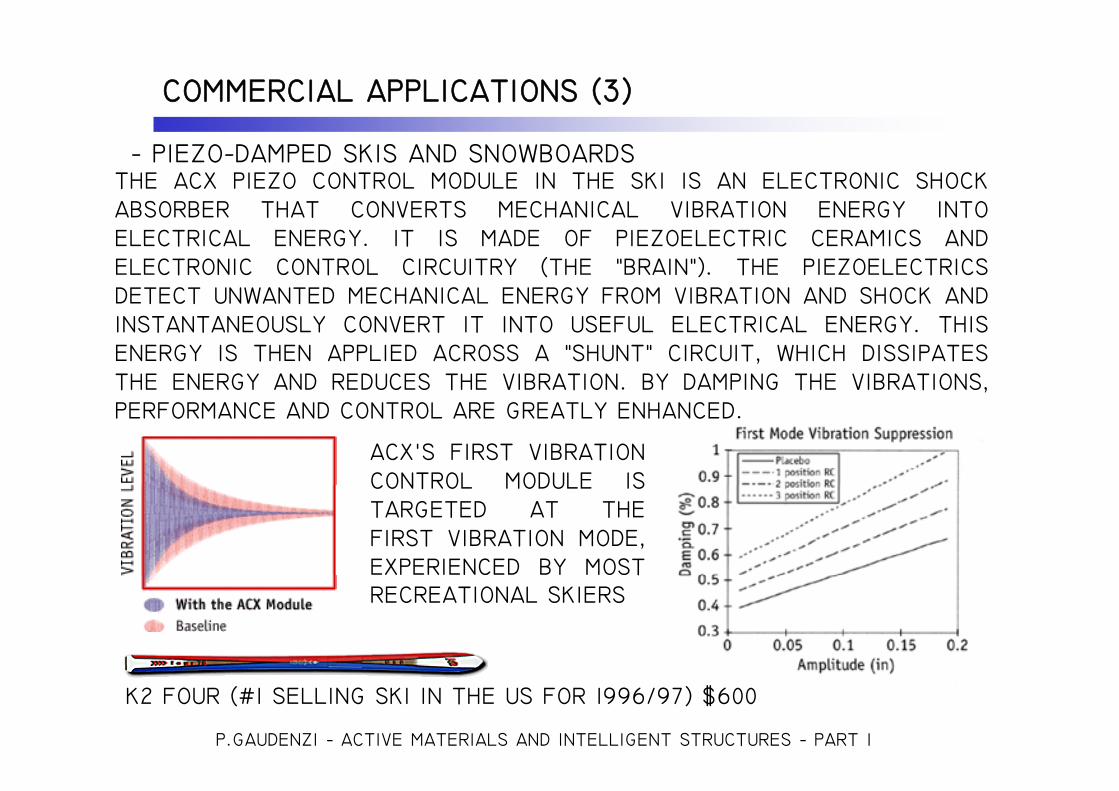
COMMERCIAL APPLICATIONS (3)
− PIEZO−DAMPED SKIS AND SNOWBOARDSTHE ACX PIEZO CONTROL MODULE IN THE SKI IS AN ELECTRONIC SHOCKABSORBER THAT CONVERTS MECHANICAL VIBRATION ENERGY INTOABSORBER THAT CONVERTS MECHANICAL VIBRATION ENERGY INTOELECTRICAL ENERGY. IT IS MADE OF PIEZOELECTRIC CERAMICS ANDELECTRONIC CONTROL CIRCUITRY (THE "BRAIN"). THE PIEZOELECTRICSDETECT UNWANTED MECHANICAL ENERGY FROM VIBRATION AND SHOCK ANDINSTANTANEOUSLY CONVERT IT INTO USEFUL ELECTRICAL ENERGY. THISENERGY IS THEN APPLIED ACROSS A "SHUNT" CIRCUIT, WHICH DISSIPATESTHE ENERGY AND REDUCES THE VIBRATION. BY DAMPING THE VIBRATIONS,PERFORMANCE AND CONTROL ARE GREATLY ENHANCED.
ACX’S FIRST VIBRATIONCONTROL MODULE ISCONTROL MODULE ISTARGETED AT THEFIRST VIBRATION MODE,EXPERIENCED BY MOSTTRECREATIONAL SKIERS
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
K2 FOUR (#1 SELLING SKI IN THE US FOR 1996/97) $600
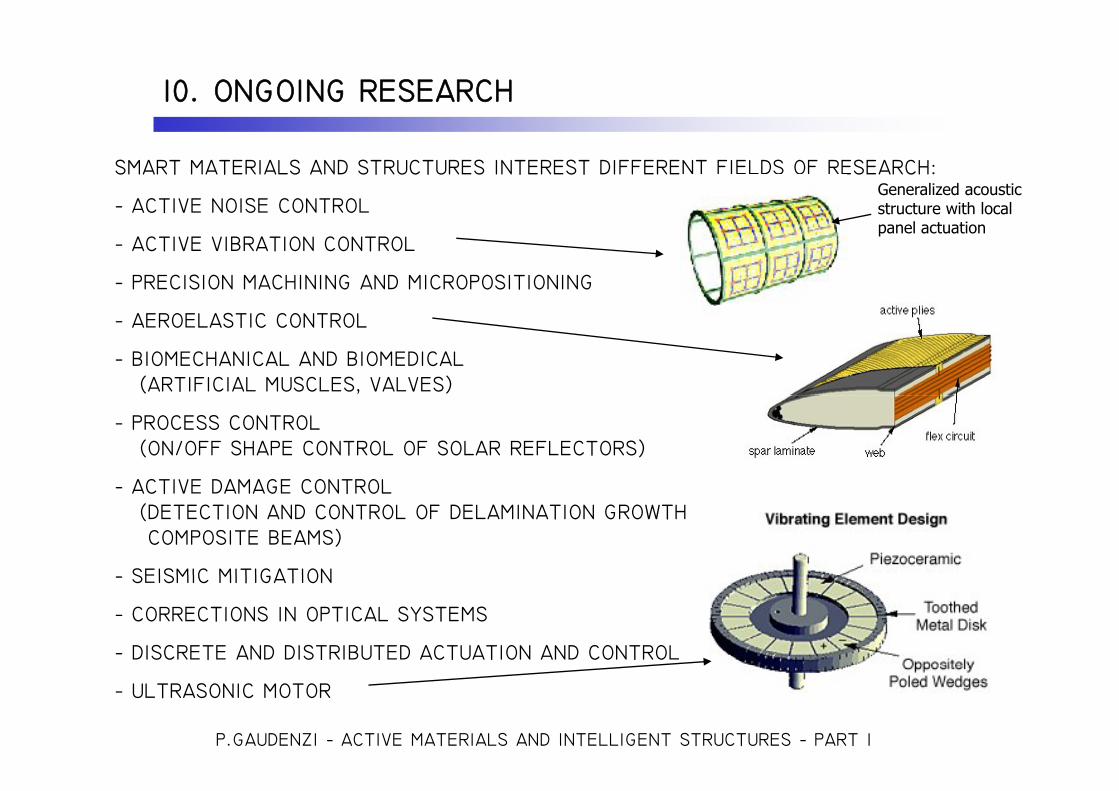
10. ONGOING RESEARCH
SMART MATERIALS AND STRUCTURES INTEREST DIFFERENT FIELDS OF RESEARCH:
− ACTIVE NOISE CONTROLGeneralized acoustic structure with local
− ACTIVE VIBRATION CONTROL
− PRECISION MACHINING AND MICROPOSITIONING
panel actuation
− AEROELASTIC CONTROL
− BIOMECHANICAL AND BIOMEDICAL (ARTIFICIAL MUSCLES, VALVES)
− PROCESS CONTROL(ON/OFF SHAPE CONTROL OF SOLAR REFLECTORS)
ACTIVE DAMAGE CONTROL− ACTIVE DAMAGE CONTROL(DETECTION AND CONTROL OF DELAMINATION GROWTH INCOMPOSITE BEAMS)
SEISMIC MITIGATION− SEISMIC MITIGATION
− CORRECTIONS IN OPTICAL SYSTEMS
− DISCRETE AND DISTRIBUTED ACTUATION AND CONTROL
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1
− ULTRASONIC MOTOR
11. REFERENCES OF PART I
1. B.K.WADA, J.L.FANSON, E.F.CRAWLEY, ˆADAPTIVE STRUCTURES˜,ADAPTIVE STRUCTURES ASME AD VOL 15 WINTER ANNUAL MEETING SANADAPTIVE STRUCTURES, ASME AD, VOL.15, WINTER ANNUAL MEETING, SANFRANCISCO, CA, 1989
2 B K WADA ˆOVERVIEW OF ADAPTIVE STRUCTURES FOR SPACE˜ ICAST2. B. K. WADA, ˆOVERVIEW OF ADAPTIVE STRUCTURES FOR SPACE˜, ICAST97, WAKIYAMA, JAPAN, OCT.29−31, 1997, PP.16−26
3. E.F.CRAWLEY, J.DE LOUIS, ˆUSE OF PIEZOELECTRIC ACTUATORS ASELEMENT OF INTELLIGENT STRUCTURES˜, AIAA, VOL.25(10), PP.1373−1385,1987
P.GAUDENZI − ACTIVE MATERIALS AND INTELLIGENT STRUCTURES − PART 1





























