Embed Size (px)
Citation preview

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Artificial Muscle based on Artificial Muscle based on Flexinol motor wireFlexinol motor wire
Scott RenkesScott Renkes
Advisor: David NoelleAdvisor: David Noelle

Intelligent Robotics LaboratoryVanderbilt School of Engineering
GoalsGoals
Design an actuator that mimics human Design an actuator that mimics human muscle movements using Flexinol motor muscle movements using Flexinol motor wire arranged in a bundle like structurewire arranged in a bundle like structure
Control the actuator with an artificial neural Control the actuator with an artificial neural network that utilizes the properties of the network that utilizes the properties of the motor wiremotor wire
Design the system to be easy to interface, Design the system to be easy to interface, modular and user-friendlymodular and user-friendly

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Current TechnologyCurrent Technology
ActuatorActuator ProsPros ConsCons
Electric Electric MotorsMotors
Light weightLight weight
Low power Low power consumptionconsumption
Limited torqueLimited torque
Stress on axelStress on axel
HydraulicsHydraulics High forceHigh force HeavyHeavy
Pump requiredPump required
PneumaticsPneumatics Medium forceMedium force
ElasticElastic
Non linearNon linear
Pump requiredPump required

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Why a new actuator?Why a new actuator?
Replicate human movementReplicate human movement Reduce stress on userReduce stress on user Better human interactionBetter human interaction
Refined force and velocity control of deviceRefined force and velocity control of device Utilize the function approximation of controllerUtilize the function approximation of controller
Human like movement allows for better man Human like movement allows for better man machine integrationmachine integration Less training timeLess training time
Humanoid robots can more easily mimic humansHumanoid robots can more easily mimic humans Robot more acceptableRobot more acceptable

Intelligent Robotics LaboratoryVanderbilt School of Engineering
FlexinolFlexinol
DensityDensity
(g/cc)(g/cc)
Energy Energy conversion conversion EfficiencyEfficiency
(%)(%)
Max Max Deformation Deformation
RatioRatio
(%)(%)
Breaking Breaking StrengthStrength
(MPa)(MPa)
MuscleMuscle 1.041.04 2525 33 72527252
FlexinolFlexinol 6.456.45 55 88 1,0001,000
Shape memory alloyShape memory alloy Returns to memorized shape when stimulatedReturns to memorized shape when stimulated Heat stimulusHeat stimulus Only responds to stretchingOnly responds to stretching

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Fibrous Bundled StructureFibrous Bundled Structure
Flexinol motor wire to Flexinol motor wire to replace muscle fibersreplace muscle fibers
Package wires similar Package wires similar to muscleto muscle
Flexinol/muscle fiber Flexinol/muscle fiber proportional elasticityproportional elasticity
Similar force/length Similar force/length curvescurves
Intelligent Robotics LaboratoryVanderbilt School of Engineering
RecruitmentRecruitment
One bundle, one neuronOne bundle, one neuron Weak fast, slow strongWeak fast, slow strong Properties of motor wire Properties of motor wire
allow for variety of activationallow for variety of activation Neural Network ControllerNeural Network Controller Force feedback trainingForce feedback training Inverse Dynamics Inverse Dynamics

Intelligent Robotics LaboratoryVanderbilt School of Engineering
FeedbackFeedback
Force feedbackForce feedback Golgi tendon organGolgi tendon organ Strain gaugeStrain gauge
Length feedbackLength feedback Muscle spindleMuscle spindle Approximation of Approximation of
Flexinol propertiesFlexinol properties
nawrot.psych.ndsu.nodak.edu/ .../Movement/Reflex.html

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Flexinol PropertiesFlexinol Properties
DiameterDiameter
(mm)(mm)Linear Linear ResistanceResistance
/m)/m)
Max Max currentcurrent
(A)(A)
Deformation Deformation WeightWeight
(g)(g)
Recovery Recovery WeightWeight
(g)(g)
Typical Typical RateRate
(cyc/min)(cyc/min)
Max Max
PowerPower
(Watt)(Watt)
3737 860860 0.30.3 44 2020 5555 60.560.5
100100 150150 1.81.8 2828 150150 4343 11.3411.34
250250 3131 6.16.1 110110 930930 1919 4.864.86
375375 88 27.527.5 393393 20002000 55 0.7740.774

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Neural Net RecruitingNeural Net Recruiting
Back Propagation Back Propagation NetworkNetwork
Neural Net Neural Net ImplementationImplementation ComputerComputer IC to Operation Voltage IC to Operation Voltage
AmplifierAmplifier Force ControlledForce Controlled
Force feedbackForce feedback Desired ForceDesired Force Maximize F/t^2Maximize F/t^2
Ensure recruitmentEnsure recruitment

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Force Length ComparisonForce Length Comparison
Muscle Force LengthMuscle Force Length See figureSee figure
Flexinol Force LengthFlexinol Force Length Steeper slopes Steeper slopes
Nature of Force Nature of Force Length RelationshipLength Relationship TensionTension stretchstretch
Intelligent Robotics LaboratoryVanderbilt School of Engineering
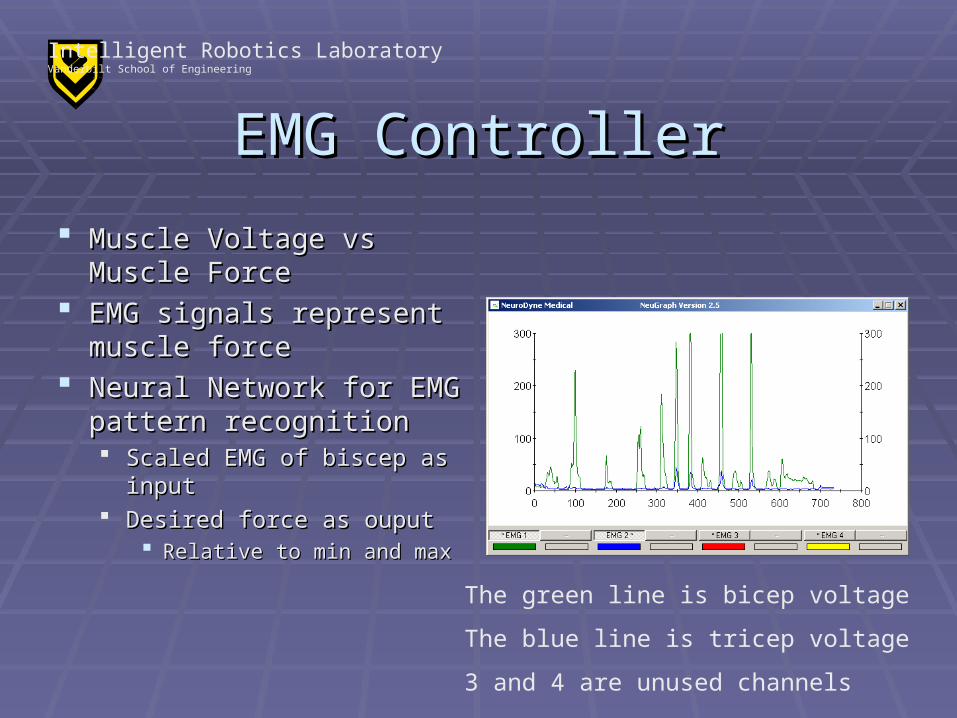
EMG ControllerEMG Controller
Muscle Voltage vs Muscle Voltage vs Muscle ForceMuscle Force
EMG signals represent EMG signals represent muscle forcemuscle force
Neural Network for EMG Neural Network for EMG pattern recognitionpattern recognition Scaled EMG of biscep as Scaled EMG of biscep as
inputinput Desired force as ouputDesired force as ouput
Relative to min and maxRelative to min and max The green line is bicep voltage
The blue line is tricep voltage
3 and 4 are unused channels

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Circuit DiagramCircuit Diagram

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Artificial Muscle ImplementationArtificial Muscle Implementation
LoadBundle
Insertion Point
Strain Gauge+ -
CrimpTendon TendonCrimp

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Sneak Preview Mk1Sneak Preview Mk1

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Sneak Preview Mk2Sneak Preview Mk2

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Mass productionMass production
Actuator is single wireActuator is single wire n loop n loop coil tension equalizedcoil tension equalized each end crimped to wireeach end crimped to wire
Epoxy to attach “tendon”Epoxy to attach “tendon” Coated for biological applicationsCoated for biological applications Portable battery and controllersPortable battery and controllers

Intelligent Robotics LaboratoryVanderbilt School of Engineering
CostCost
1 meter each1 meter each Flexinol HT 375Flexinol HT 375 Flexinol HT 200Flexinol HT 200 Flexinol HT 100Flexinol HT 100 Flexinol HT 037Flexinol HT 037
Microprocessor X 2Microprocessor X 2 MultiplexerMultiplexer Voltage AmplifierVoltage Amplifier WiringWiring EpoxyEpoxy CableCable
TotalTotal
$22.95$22.95 $19.95$19.95 $17.95$17.95 $16.95$16.95
$50.00$50.00 $8.00$8.00 $10.00$10.00 $10.00$10.00 $8.00$8.00 $8.00$8.00
$171.80$171.80

Intelligent Robotics LaboratoryVanderbilt School of Engineering
Project StatusProject Status
Completed workCompleted work Study properties of motor wireStudy properties of motor wire Calculate efficiency of passive coolingCalculate efficiency of passive cooling Develop Structure and Control for the deviceDevelop Structure and Control for the device Design test bedDesign test bed Build actuatorBuild actuator
Current WorkCurrent Work Finish neural network controllerFinish neural network controller
Intelligent Robotics LaboratoryVanderbilt School of Engineering
Future WorkFuture Work
Examine biocompatibilityExamine biocompatibility Calculate mass production costsCalculate mass production costs Evaluate production and market feasibilityEvaluate production and market feasibility
Intelligent Robotics LaboratoryVanderbilt School of Engineering
Questions?Questions?