Embed Size (px)
DESCRIPTION
Describe el uso de las integrales de mohr para hallar el desplazamiento en vigas o marcos utilizando los principios de trabajo virtual.
Citation preview
Integrales de Mohr
FACULTAD DE INGENIERÍA Temas Selectos de Estructuras

Integrales de Mohr
Temas Selectos de Estructuras
INDICE
1. Principio del trabajo virtual ........................................................................................................ 1
2. Integrales de Mohr ..................................................................................................................... 5
Tabla de Integrales de Mohr (Producto de Diagramas) .................................................................... 8
3. Deflexiones y rotaciones en marcos por el método del trabajo virtual ................................. 10
4. Resolución de marcos por el método de Mohr. ...................................................................... 19
Bibliografía ........................................................................................................................................ 22
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 1 | P á g i n a
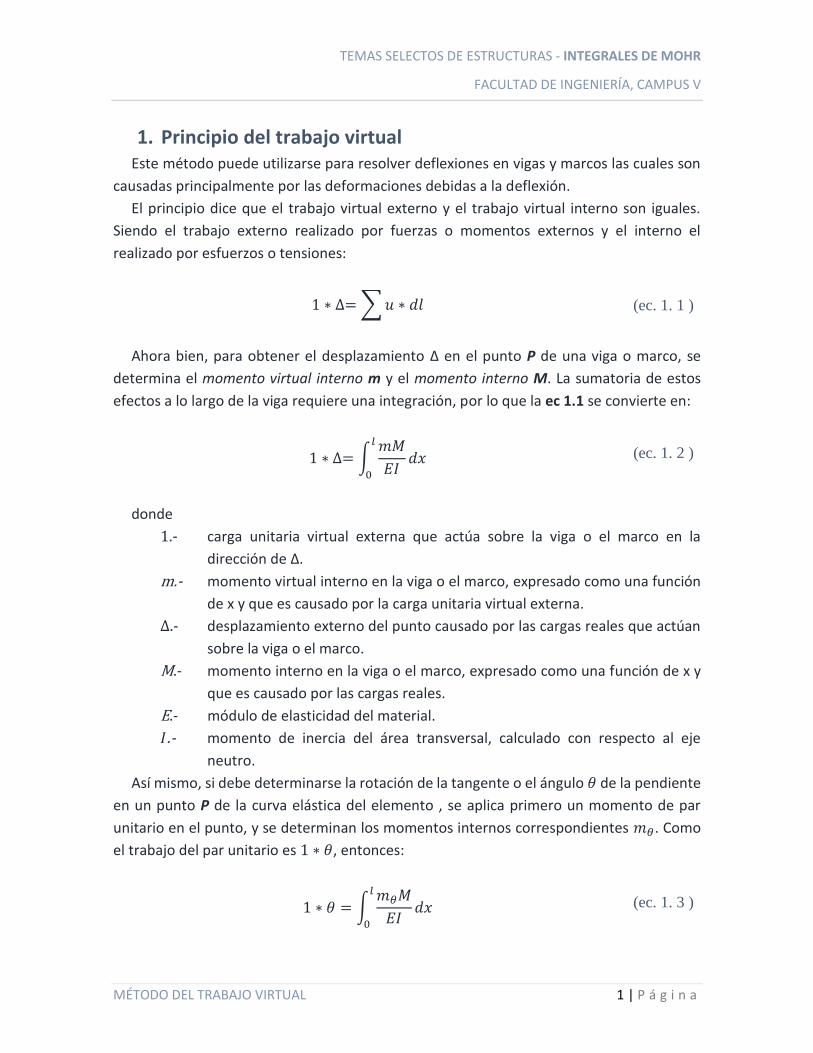
1. Principio del trabajo virtual Este método puede utilizarse para resolver deflexiones en vigas y marcos las cuales son
causadas principalmente por las deformaciones debidas a la deflexión.
El principio dice que el trabajo virtual externo y el trabajo virtual interno son iguales.
Siendo el trabajo externo realizado por fuerzas o momentos externos y el interno el
realizado por esfuerzos o tensiones:
1 ∗ ∆= ∑ 𝑢 ∗ 𝑑𝑙 (ec. 1. 1 )
Ahora bien, para obtener el desplazamiento ∆ en el punto P de una viga o marco, se
determina el momento virtual interno m y el momento interno M. La sumatoria de estos
efectos a lo largo de la viga requiere una integración, por lo que la ec 1.1 se convierte en:
1 ∗ ∆= ∫𝑚𝑀
𝐸𝐼𝑑𝑥
𝑙
0
(ec. 1. 2 )
donde
1.- carga unitaria virtual externa que actúa sobre la viga o el marco en la
dirección de ∆.
m.- momento virtual interno en la viga o el marco, expresado como una función
de x y que es causado por la carga unitaria virtual externa.
∆.- desplazamiento externo del punto causado por las cargas reales que actúan
sobre la viga o el marco.
M.- momento interno en la viga o el marco, expresado como una función de x y
que es causado por las cargas reales.
E.- módulo de elasticidad del material.
𝐼.- momento de inercia del área transversal, calculado con respecto al eje
neutro.
Así mismo, si debe determinarse la rotación de la tangente o el ángulo 𝜃 de la pendiente
en un punto P de la curva elástica del elemento , se aplica primero un momento de par
unitario en el punto, y se determinan los momentos internos correspondientes 𝑚𝜃. Como
el trabajo del par unitario es 1 ∗ 𝜃, entonces:
1 ∗ 𝜃 = ∫𝑚𝜃𝑀
𝐸𝐼𝑑𝑥
𝑙
0
(ec. 1. 3 )
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 2 | P á g i n a
A continuación se presenta un ejemplo en donde se aplica lo descrito.
Ejemplo 1.1a
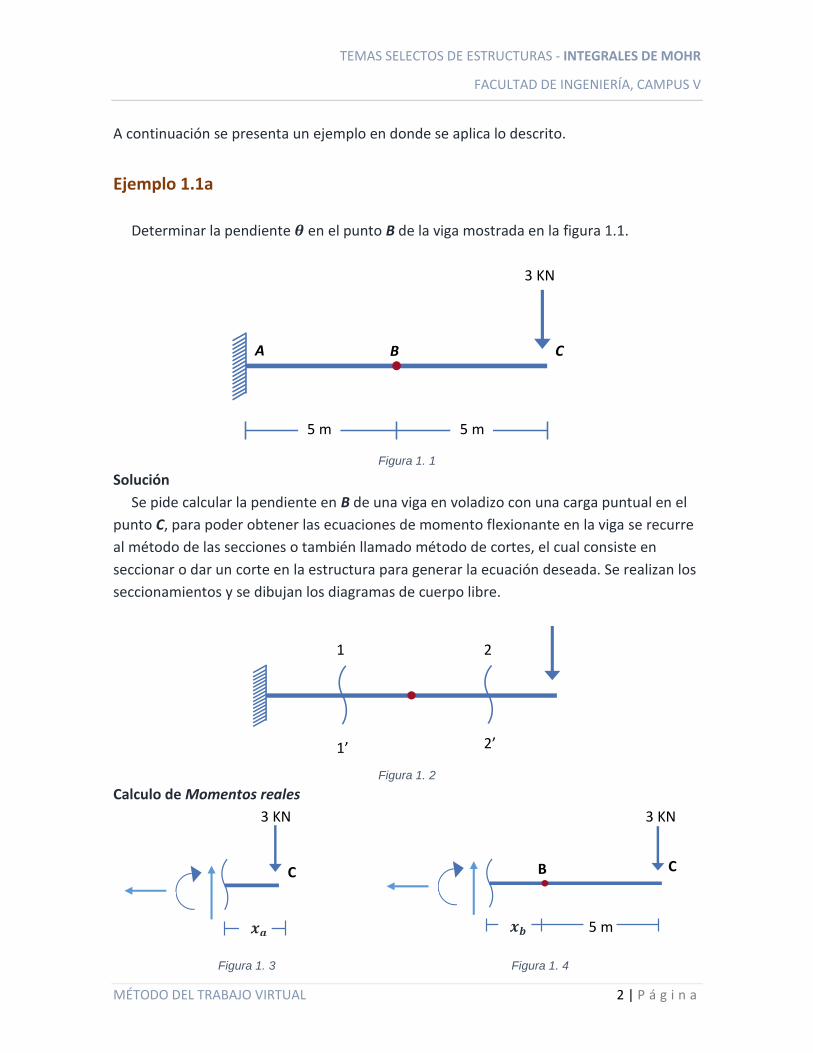
Determinar la pendiente 𝜽 en el punto B de la viga mostrada en la figura 1.1.
Figura 1. 1
Solución
Se pide calcular la pendiente en B de una viga en voladizo con una carga puntual en el
punto C, para poder obtener las ecuaciones de momento flexionante en la viga se recurre
al método de las secciones o también llamado método de cortes, el cual consiste en
seccionar o dar un corte en la estructura para generar la ecuación deseada. Se realizan los
seccionamientos y se dibujan los diagramas de cuerpo libre.
Figura 1. 2
Calculo de Momentos reales
Figura 1. 3 Figura 1. 4
𝒙𝒂
3 KN
C
5 m
3 KN
C
𝒙𝒃
B
5 m 5 m
3 KN
A B C
1
1’
2
2’
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 3 | P á g i n a
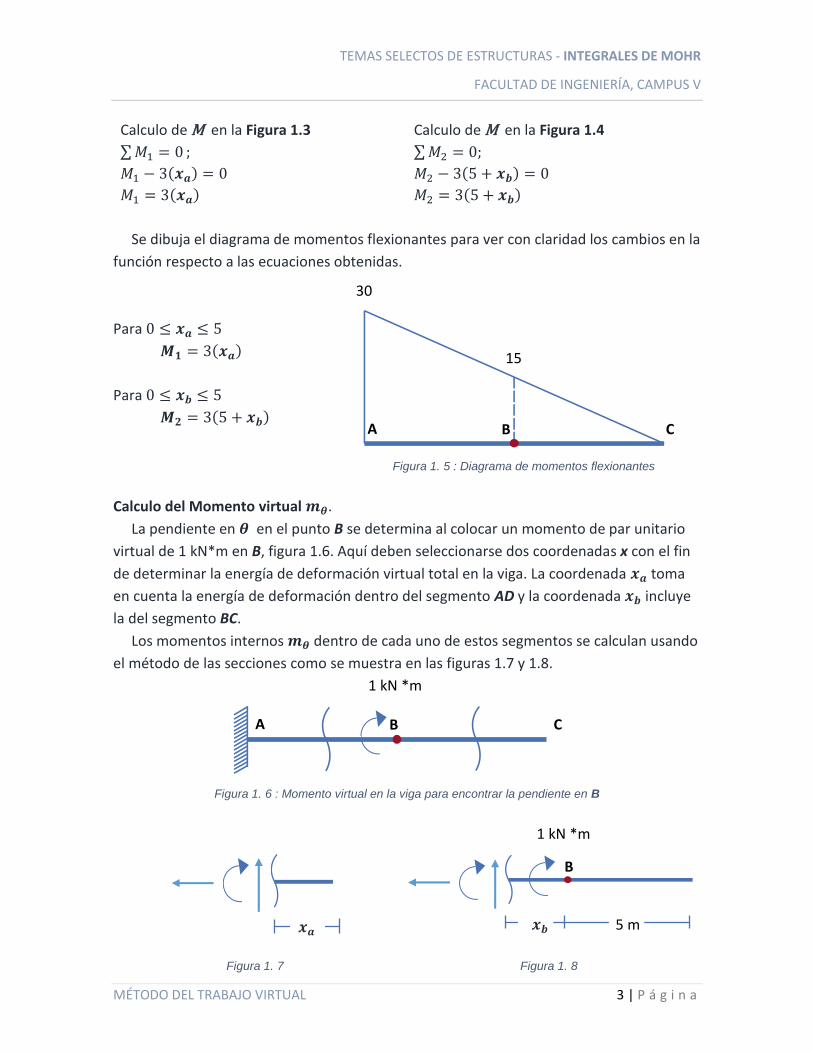
Calculo de M en la Figura 1.3
∑ 𝑀1 = 0 ;
𝑀1 − 3(𝒙𝒂) = 0
𝑀1 = 3(𝒙𝒂)
Calculo de M en la Figura 1.4
∑ 𝑀2 = 0;
𝑀2 − 3(5 + 𝒙𝒃) = 0
𝑀2 = 3(5 + 𝒙𝒃)
Se dibuja el diagrama de momentos flexionantes para ver con claridad los cambios en la
función respecto a las ecuaciones obtenidas.
Para 0 ≤ 𝒙𝒂 ≤ 5
𝑴𝟏 = 3(𝒙𝒂)
Para 0 ≤ 𝒙𝒃 ≤ 5
𝑴𝟐 = 3(5 + 𝒙𝒃)
Calculo del Momento virtual 𝒎𝜽.
La pendiente en 𝜽 en el punto B se determina al colocar un momento de par unitario
virtual de 1 kN*m en B, figura 1.6. Aquí deben seleccionarse dos coordenadas x con el fin
de determinar la energía de deformación virtual total en la viga. La coordenada 𝒙𝒂 toma
en cuenta la energía de deformación dentro del segmento AD y la coordenada 𝒙𝒃 incluye
la del segmento BC.
Los momentos internos 𝒎𝜽 dentro de cada uno de estos segmentos se calculan usando
el método de las secciones como se muestra en las figuras 1.7 y 1.8.
Figura 1. 6 : Momento virtual en la viga para encontrar la pendiente en B
Figura 1. 7 Figura 1. 8
Figura 1. 5 : Diagrama de momentos flexionantes
30
A B C
15
5 m 𝒙𝒃
B
1 kN *m
A B C
1 kN *m
𝒙𝒂

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 4 | P á g i n a
Calculo de 𝒎𝜽 en la Figura 1.7
∑ 𝑚1 = 0 ;
𝑚1 = 0
Calculo de 𝒎𝜽 en la Figura 1.8
∑ 𝑚2 = 0;
𝑚2 = 1
Para 0 ≤ 𝒙𝒂 ≤ 5
𝒎𝟏 = 0
Para 0 ≤ 𝒙𝒃 ≤ 5
𝒎𝟐 = 1
Ecuación del trabajo virtual
Entonces, haciendo uso de la ec 1.3, la pendiente en B resulta como:
1 ∗ 𝜃 = ∫𝑚𝜃𝑀
𝐸𝐼𝑑𝑥
𝑙
0
(ec. 1. 4 )
Página 1 > Tema 1.- Principio del trabajo virtual.
Tramo CB
𝜃1 = ∫3𝑥𝑎(0)
𝐸𝐼𝑑𝑥
5
0
= 0
Tramo BA
𝜃2 = ∫3(5 + 𝑥𝑏)(1)
𝐸𝐼𝑑𝑥
5
0
𝜃2 =1
𝐸𝐼∫ 15 + 3𝑥𝑏 =
1
𝐸𝐼∫ 15𝑥 +
3𝑥𝑏2
2
5
0
5
0
𝜃2 =1
𝐸𝐼[15𝑥 +
3𝑥𝑏2
2]
5
0==
1
𝐸𝐼[15(5) +
3(52)
2]
𝜃2 =1
𝐸𝐼[75 + 37.5] =
𝟏
𝑬𝑰(𝟏𝟏𝟐. 𝟓 𝒌𝑵𝟐𝒎𝟑)
𝜽𝑻𝒐𝒕𝒂𝒍 =1
𝐸𝐼(112.5) =
𝟏𝟏𝟐. 𝟓 𝒌𝑵𝟐𝒎𝟑
𝑬𝑰
Figura 1. 9 : Diagrama de momento virtual interno.
1
A B C
0

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 5 | P á g i n a
2. Integrales de Mohr En el ejemplo 1.1a se pudo observar que aun cuando la estructura está sometida a una
carga relativamente simple, la solución para un desplazamiento por el método virtual
requiere varias integraciones de las funciones de momento flexionantes M y 𝒎𝜽. Para
simplificar el procedimiento de integración podemos recurrir a un método general de
cálculo para los desplazamientos. Este método fue propuesto por el destacado científico
alemán Otto Mohr, la magnífica formula de Mohr (integral de Mohr) que permite
determinar el desplazamiento en cualquier punto de un sistema linealmente deformable.
∫ 𝑚𝑀(𝑑𝑥)𝑙
0
(ec. 1. 5 )
En esta fórmula, el producto que figura dentro de la integral 𝑚𝑀 es positivo si los dos
momentos flectores tienen el mismo signo. Anotando por ∆ cualquier desplazamiento
(lineal o angular) escribamos la formula (integral) de Mohr en la forma siguiente.
∆= ∫ 𝑚𝑀(𝑑𝑥)𝑙
0
(ec. 1. 6 )
En el caso general, la expresión analítica de 𝑚 y 𝑀 puede ser distinta en los distintos
tramos de la viga o, en general, del sistema elástico. Por ello, en lugar de la ecuación 1.6 se
debe emplear otra
∆= ∑ ∫ 𝑚𝑀(𝑑𝑥)
𝑙
0
(ec. 1. 7 )
A diferencia de lo presentado anteriormente, Mohr descubrió que en lugar de calcular
directamente las integrales, se podría recurrir a un método grafico-analítico, denominado
“método de multiplicación de los gráficos”.
Este método se reduce a la representación en unas tablas que permiten obtener aún
más directamente, el resultado de la integración a partir de los diagramas de momentos
que se presentan con más frecuencia en la práctica.
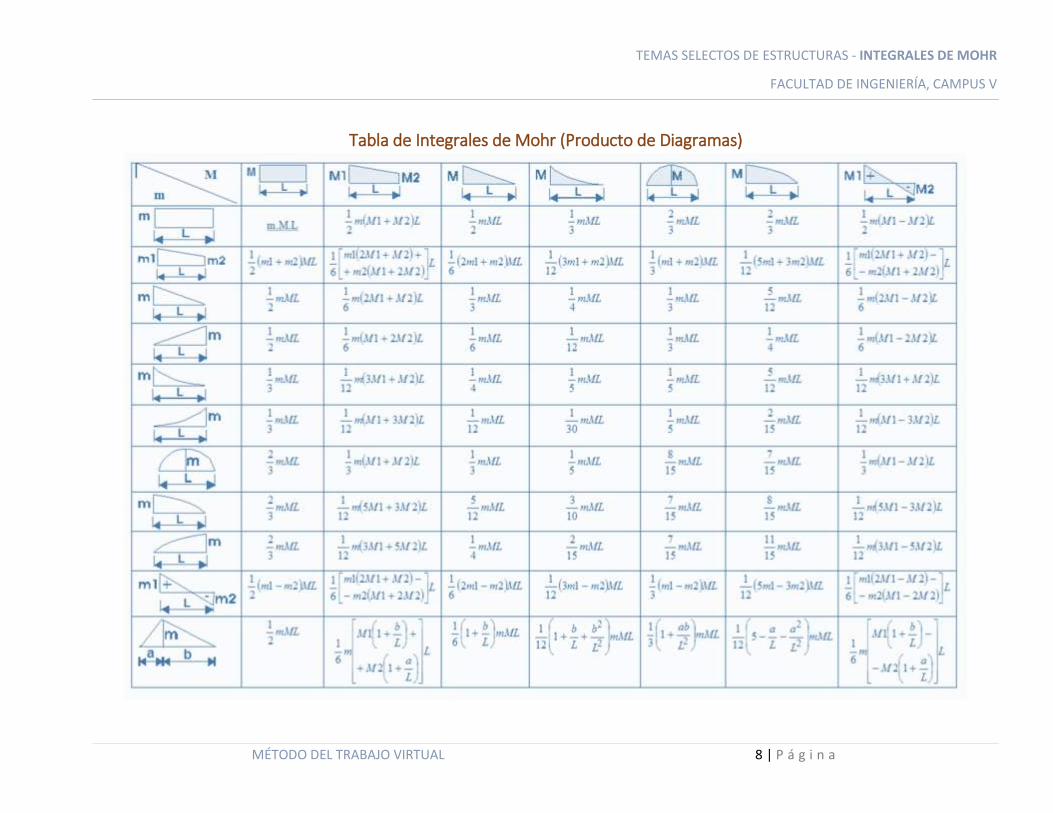
Estas tablas se le conocen con el nombre de tabla de integrales de Mohr en los cuales
una vez determinados los diagramas de momentos M y 𝒎 , y seleccionado el tramo en el
que se va a plantear la ecuación del producto de las dos funciones, se entra a una columna
de esta tabla que corresponda al diagrama de M y a una fila que corresponda al diagrama
de m o viceversa.
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 6 | P á g i n a
La intersección de la columna y el renglón seleccionados proporciona el resultado de la
integración del producto, o sea, de ∫ 𝑚𝑀(𝑑𝑥)𝑙
0, donde 𝒍 es la longitud del tramo en que
se efectúa la integración, como se ve en la tabla.
Como el valor de EI que aparece en las ecuaciones suele ser constante, el uso de la tabla
de integrales de Mohr simplifica el uso del método del trabajo virtual.
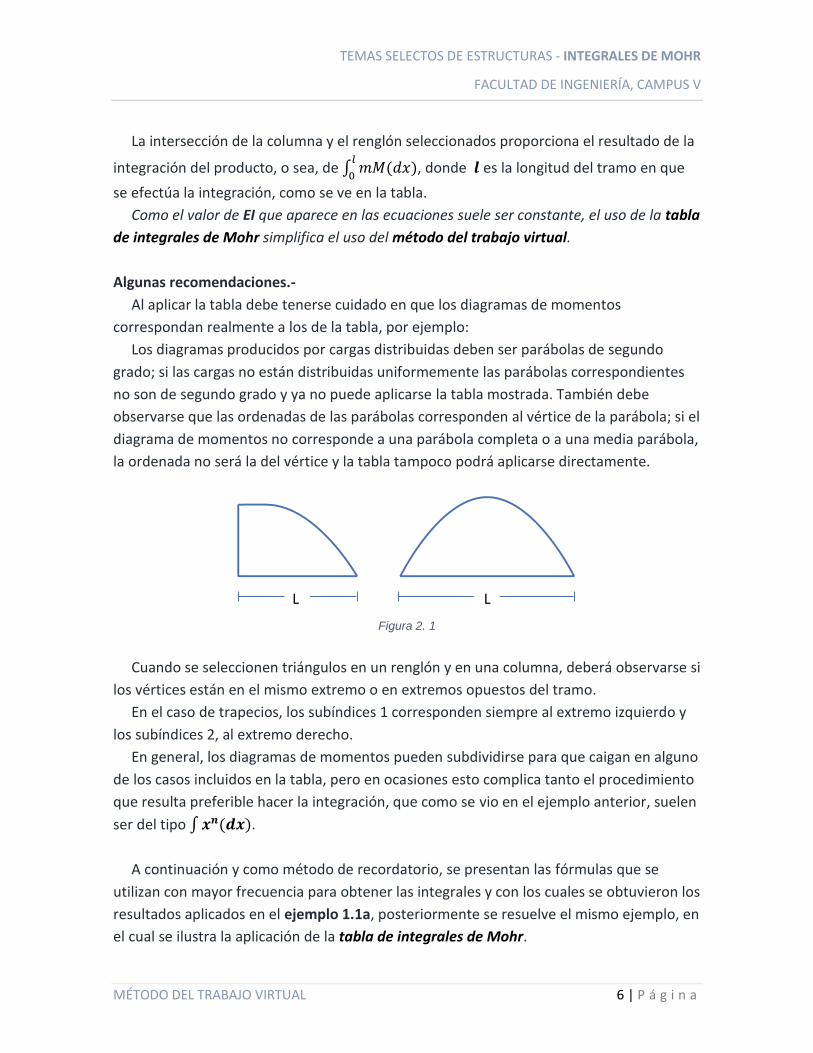
Algunas recomendaciones.-
Al aplicar la tabla debe tenerse cuidado en que los diagramas de momentos
correspondan realmente a los de la tabla, por ejemplo:
Los diagramas producidos por cargas distribuidas deben ser parábolas de segundo
grado; si las cargas no están distribuidas uniformemente las parábolas correspondientes
no son de segundo grado y ya no puede aplicarse la tabla mostrada. También debe
observarse que las ordenadas de las parábolas corresponden al vértice de la parábola; si el
diagrama de momentos no corresponde a una parábola completa o a una media parábola,
la ordenada no será la del vértice y la tabla tampoco podrá aplicarse directamente.
Figura 2. 1
Cuando se seleccionen triángulos en un renglón y en una columna, deberá observarse si
los vértices están en el mismo extremo o en extremos opuestos del tramo.
En el caso de trapecios, los subíndices 1 corresponden siempre al extremo izquierdo y
los subíndices 2, al extremo derecho.
En general, los diagramas de momentos pueden subdividirse para que caigan en alguno
de los casos incluidos en la tabla, pero en ocasiones esto complica tanto el procedimiento
que resulta preferible hacer la integración, que como se vio en el ejemplo anterior, suelen
ser del tipo ∫ 𝒙𝒏(𝒅𝒙).
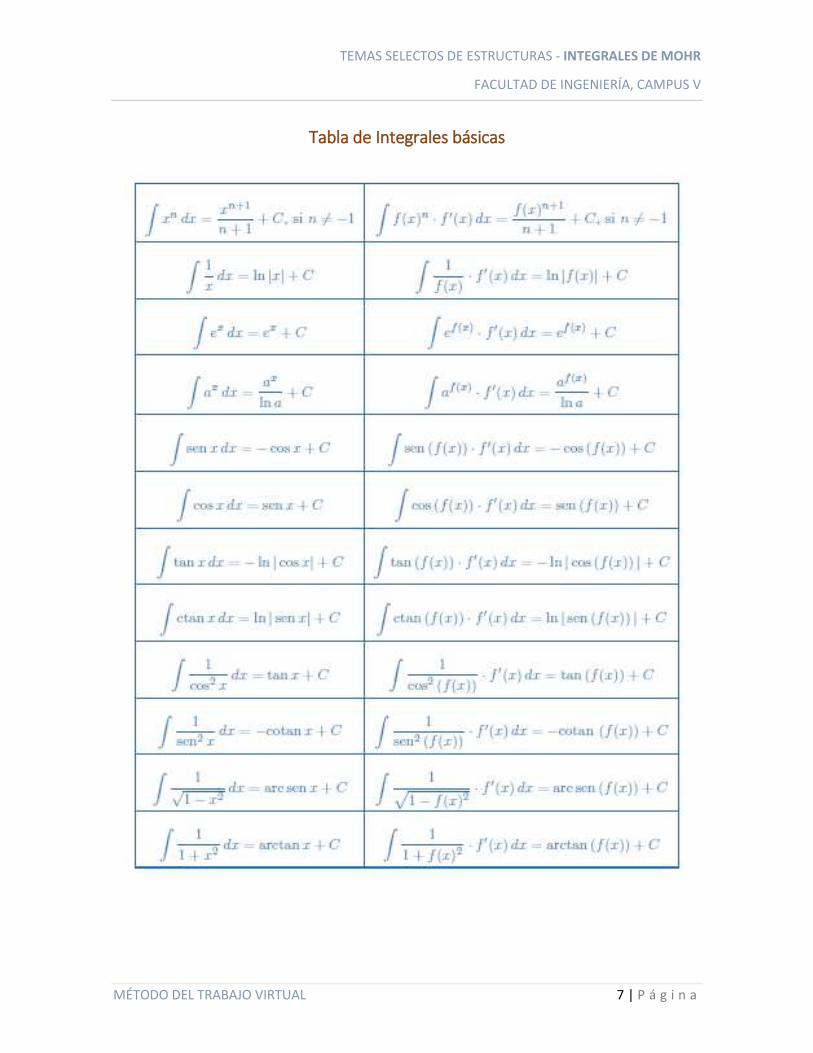
A continuación y como método de recordatorio, se presentan las fórmulas que se
utilizan con mayor frecuencia para obtener las integrales y con los cuales se obtuvieron los
resultados aplicados en el ejemplo 1.1a, posteriormente se resuelve el mismo ejemplo, en
el cual se ilustra la aplicación de la tabla de integrales de Mohr.
L L
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 7 | P á g i n a
Tabla de Integrales básicas
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 8 | P á g i n a
Tabla de Integrales de Mohr (Producto de Diagramas)
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 9 | P á g i n a
Ejemplo 1.1b
Solución
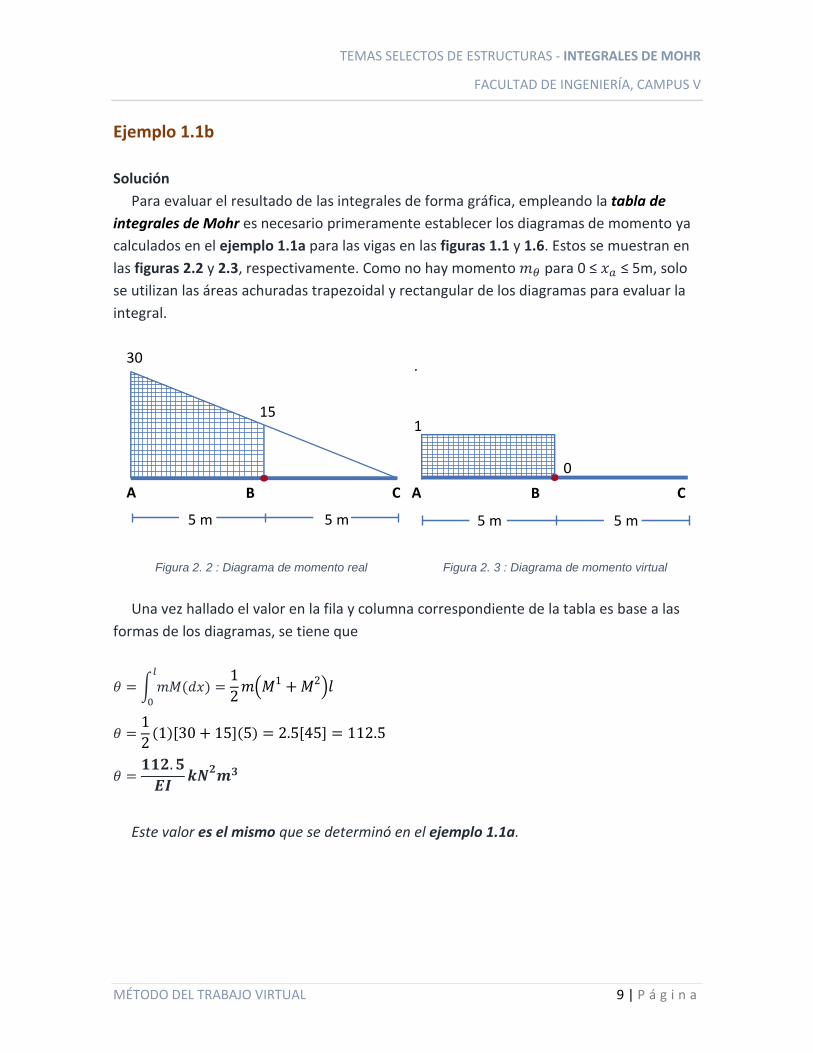
Para evaluar el resultado de las integrales de forma gráfica, empleando la tabla de
integrales de Mohr es necesario primeramente establecer los diagramas de momento ya
calculados en el ejemplo 1.1a para las vigas en las figuras 1.1 y 1.6. Estos se muestran en
las figuras 2.2 y 2.3, respectivamente. Como no hay momento 𝑚𝜃 para 0 ≤ 𝑥𝑎 ≤ 5m, solo
se utilizan las áreas achuradas trapezoidal y rectangular de los diagramas para evaluar la
integral.
Figura 2. 2 : Diagrama de momento real Figura 2. 3 : Diagrama de momento virtual
Una vez hallado el valor en la fila y columna correspondiente de la tabla es base a las
formas de los diagramas, se tiene que
𝜃 = ∫ 𝑚𝑀(𝑑𝑥)𝑙
0
=1
2𝑚(𝑀1 + 𝑀2)𝑙
𝜃 =1
2(1)[30 + 15](5) = 2.5[45] = 112.5
𝜃 =𝟏𝟏𝟐. 𝟓
𝑬𝑰𝒌𝑵𝟐𝒎𝟑
Este valor es el mismo que se determinó en el ejemplo 1.1a.
A B C
30
15
5 m 5 m
A B C
1
0
5 m 5 m
.
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 10 | P á g i n a
3. Deflexiones y rotaciones en marcos por el método del
trabajo virtual El método del trabajo virtual presenta claras ventajas sobre los otros métodos cuando se
trata de calcular las deformaciones en marcos. El procedimiento es igual al utilizado para el
cálculo de deformaciones en vigas, pero la integración planteada en las ec 1.2 y 1.3 se lleva
a cabo a través de todos los miembros que componen el marco.
Desde luego que dentro de cada miembro resulta necesario hacer la integración en
distintos tramos, si las funciones de M o de m no son continuas a lo largo del miembro.
En el siguiente ejemplo se ilustra lo que se acaba de mencionar.
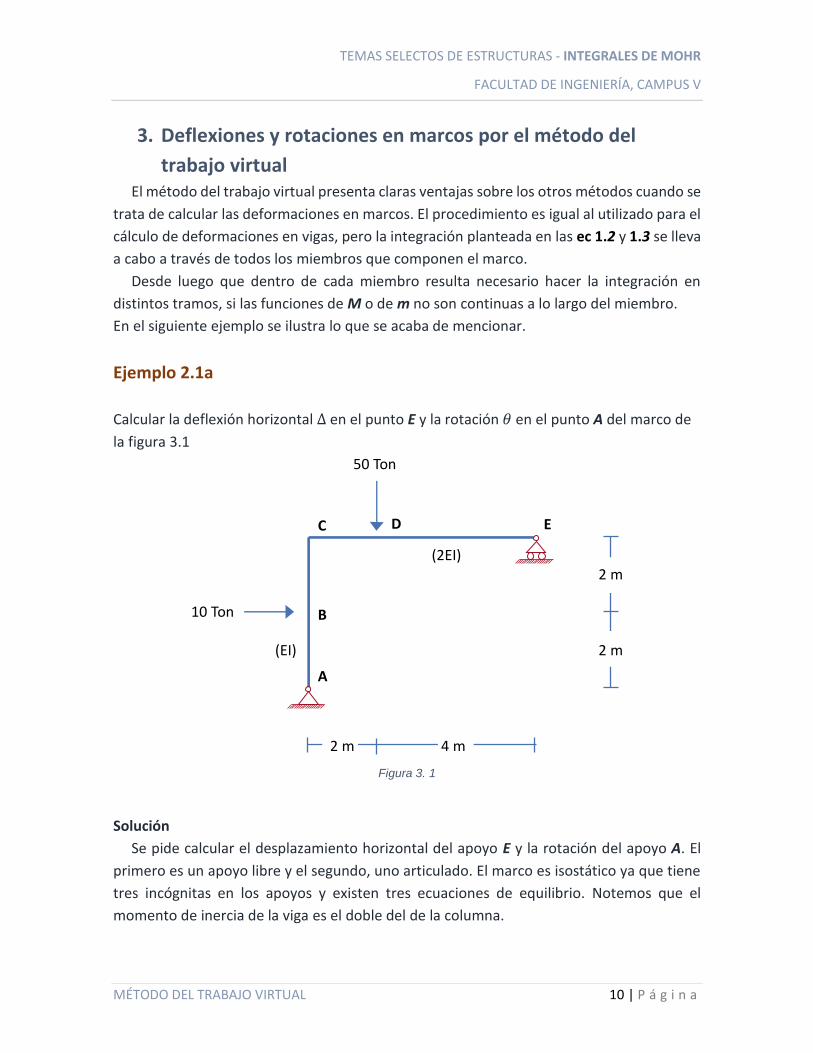
Ejemplo 2.1a
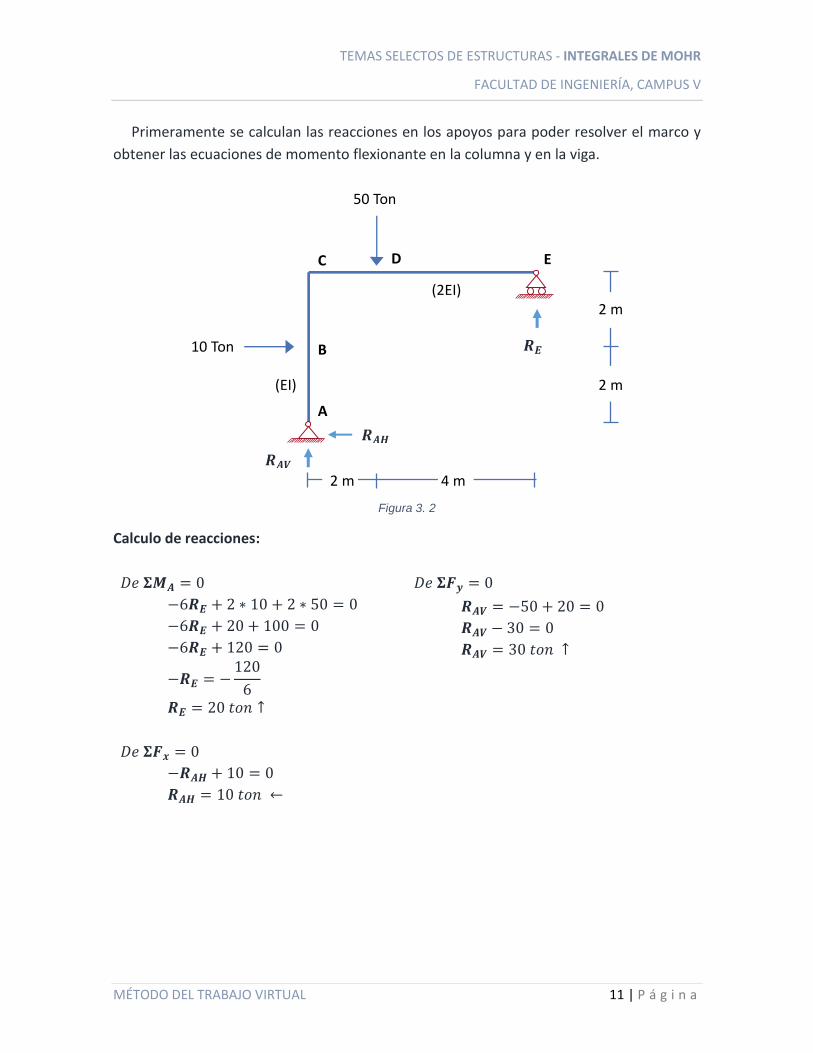
Calcular la deflexión horizontal ∆ en el punto E y la rotación 𝜃 en el punto A del marco de
la figura 3.1
Figura 3. 1
Solución
Se pide calcular el desplazamiento horizontal del apoyo E y la rotación del apoyo A. El
primero es un apoyo libre y el segundo, uno articulado. El marco es isostático ya que tiene
tres incógnitas en los apoyos y existen tres ecuaciones de equilibrio. Notemos que el
momento de inercia de la viga es el doble del de la columna.
50 Ton
10 Ton
2 m 4 m
2 m
2 m
A
B
C D E
(EI)
(2EI)
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 11 | P á g i n a
Primeramente se calculan las reacciones en los apoyos para poder resolver el marco y
obtener las ecuaciones de momento flexionante en la columna y en la viga.
Figura 3. 2
Calculo de reacciones:
𝐷𝑒 𝚺𝑴𝑨 = 0
−6𝑹𝑬 + 2 ∗ 10 + 2 ∗ 50 = 0
−6𝑹𝑬 + 20 + 100 = 0
−6𝑹𝑬 + 120 = 0
−𝑹𝑬 = −120
6
𝑹𝑬 = 20 𝑡𝑜𝑛 ↑
𝐷𝑒 𝚺𝑭𝒙 = 0
−𝑹𝑨𝑯 + 10 = 0
𝑹𝑨𝑯 = 10 𝑡𝑜𝑛 ←
𝐷𝑒 𝚺𝑭𝒚 = 0
𝑹𝑨𝑽 = −50 + 20 = 0
𝑹𝑨𝑽 − 30 = 0
𝑹𝑨𝑽 = 30 𝑡𝑜𝑛 ↑
50 Ton
10 Ton
2 m 4 m
2 m
2 m
A
B
C D E
(EI)
(2EI)
𝑹𝑨𝑽
𝑹𝑨𝑯
𝑹𝑬
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 12 | P á g i n a
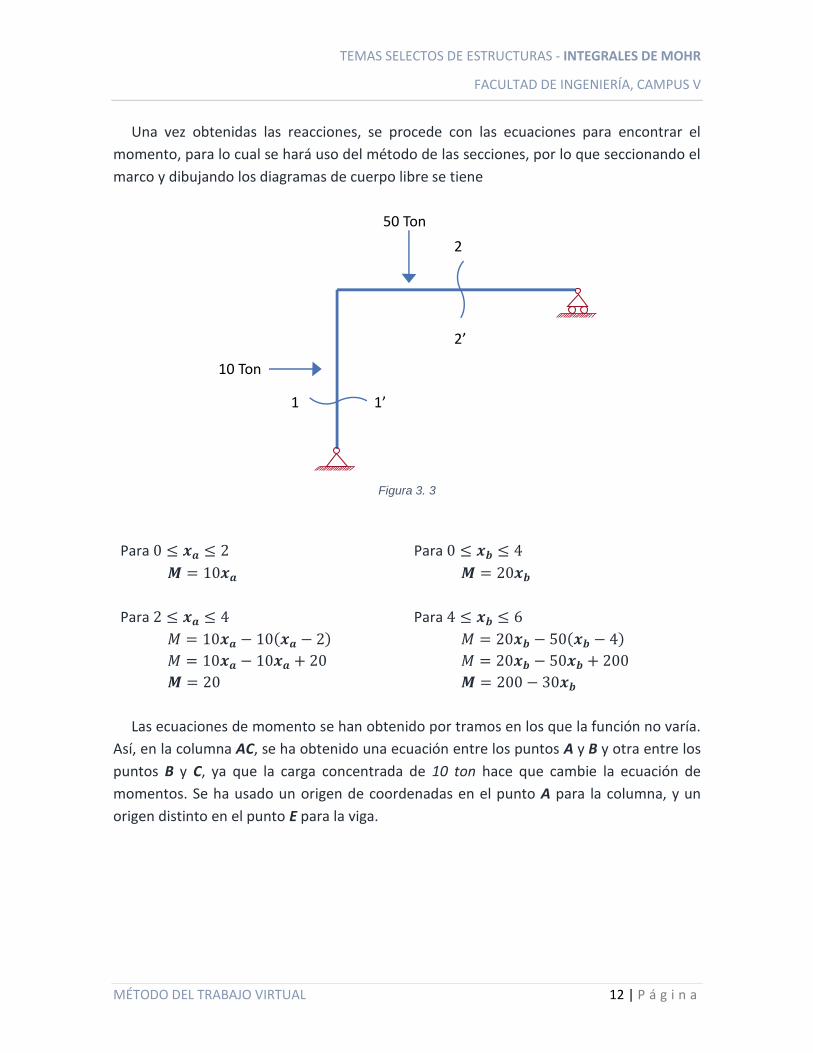
Una vez obtenidas las reacciones, se procede con las ecuaciones para encontrar el
momento, para lo cual se hará uso del método de las secciones, por lo que seccionando el
marco y dibujando los diagramas de cuerpo libre se tiene
Figura 3. 3
Para 0 ≤ 𝒙𝒂 ≤ 2
𝑴 = 10𝒙𝒂
Para 2 ≤ 𝒙𝒂 ≤ 4
𝑀 = 10𝒙𝒂 − 10(𝒙𝒂 − 2)
𝑀 = 10𝒙𝒂 − 10𝒙𝒂 + 20
𝑴 = 20
Para 0 ≤ 𝒙𝒃 ≤ 4
𝑴 = 20𝒙𝒃
Para 4 ≤ 𝒙𝒃 ≤ 6
𝑀 = 20𝒙𝒃 − 50(𝒙𝒃 − 4)
𝑀 = 20𝒙𝒃 − 50𝒙𝒃 + 200
𝑴 = 200 − 30𝒙𝒃
Las ecuaciones de momento se han obtenido por tramos en los que la función no varía.
Así, en la columna AC, se ha obtenido una ecuación entre los puntos A y B y otra entre los
puntos B y C, ya que la carga concentrada de 10 ton hace que cambie la ecuación de
momentos. Se ha usado un origen de coordenadas en el punto A para la columna, y un
origen distinto en el punto E para la viga.
50 Ton
10 Ton
1’ 1
2’
2
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 13 | P á g i n a
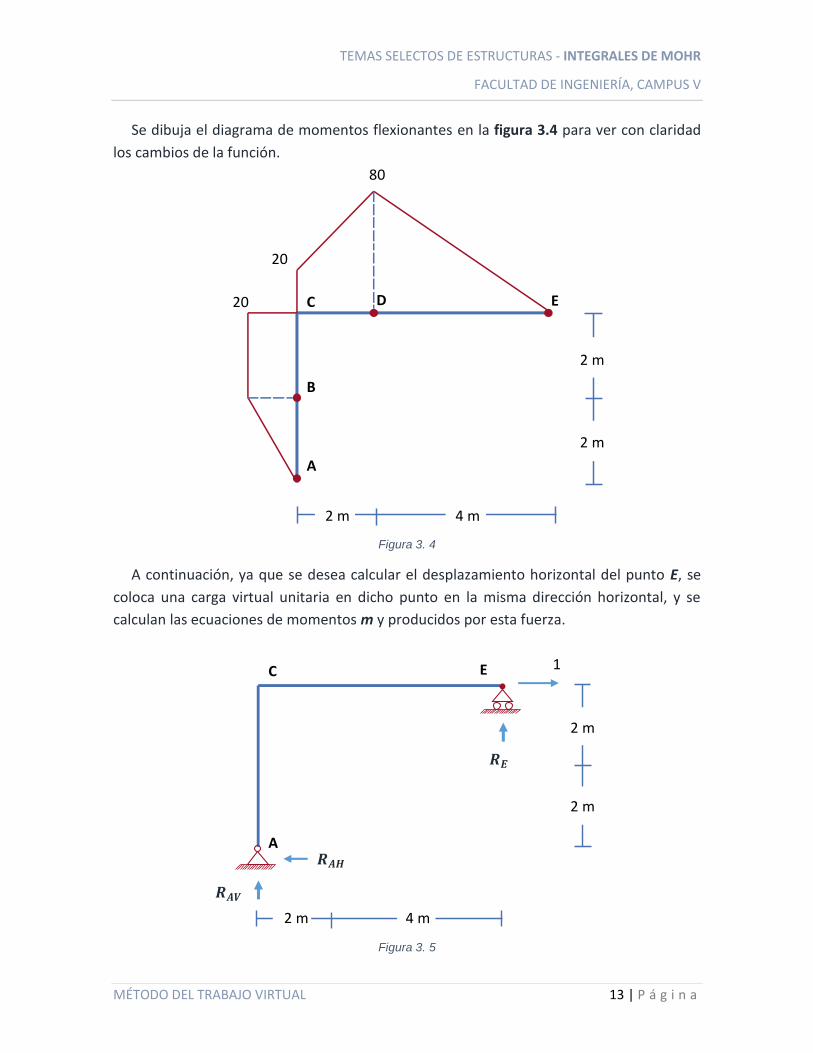
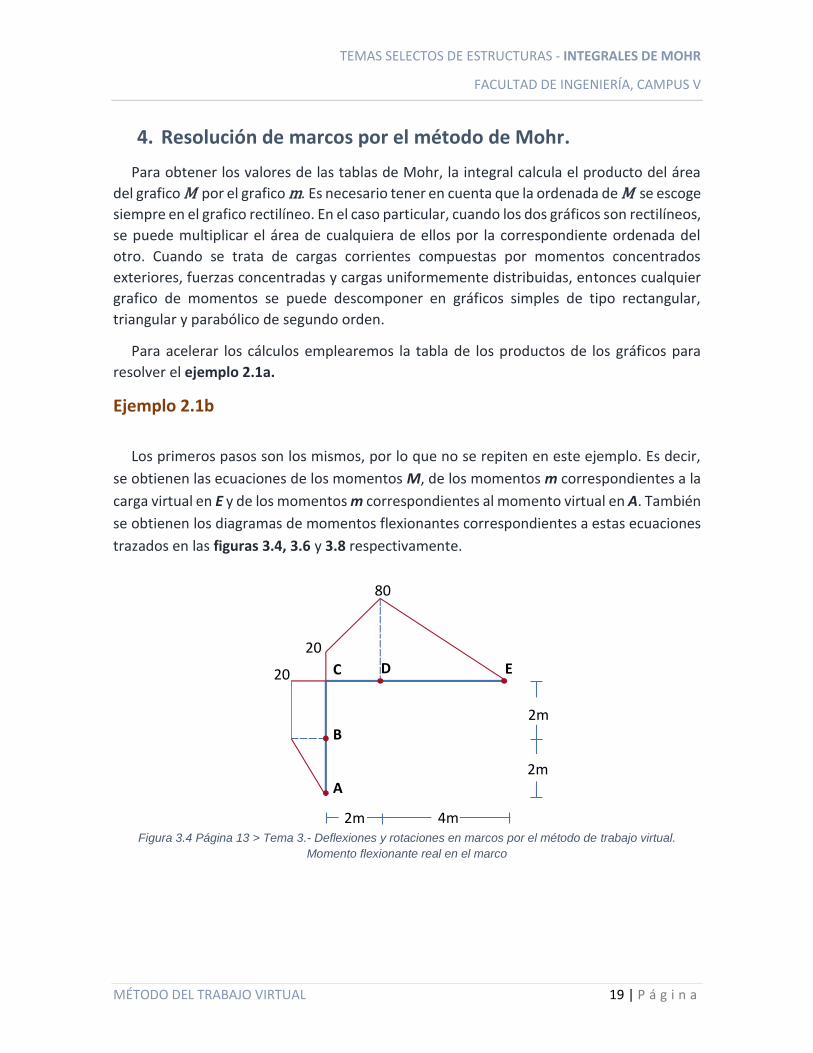
Se dibuja el diagrama de momentos flexionantes en la figura 3.4 para ver con claridad
los cambios de la función.
Figura 3. 4
A continuación, ya que se desea calcular el desplazamiento horizontal del punto E, se
coloca una carga virtual unitaria en dicho punto en la misma dirección horizontal, y se
calculan las ecuaciones de momentos m y producidos por esta fuerza.
Figura 3. 5
80
2 m 4 m
2 m
2 m
20
20
A
B
C D E
2 m 4 m
2 m
2 m
A
C E
𝑹𝑨𝑽
𝑹𝑨𝑯
𝑹𝑬
1
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 14 | P á g i n a
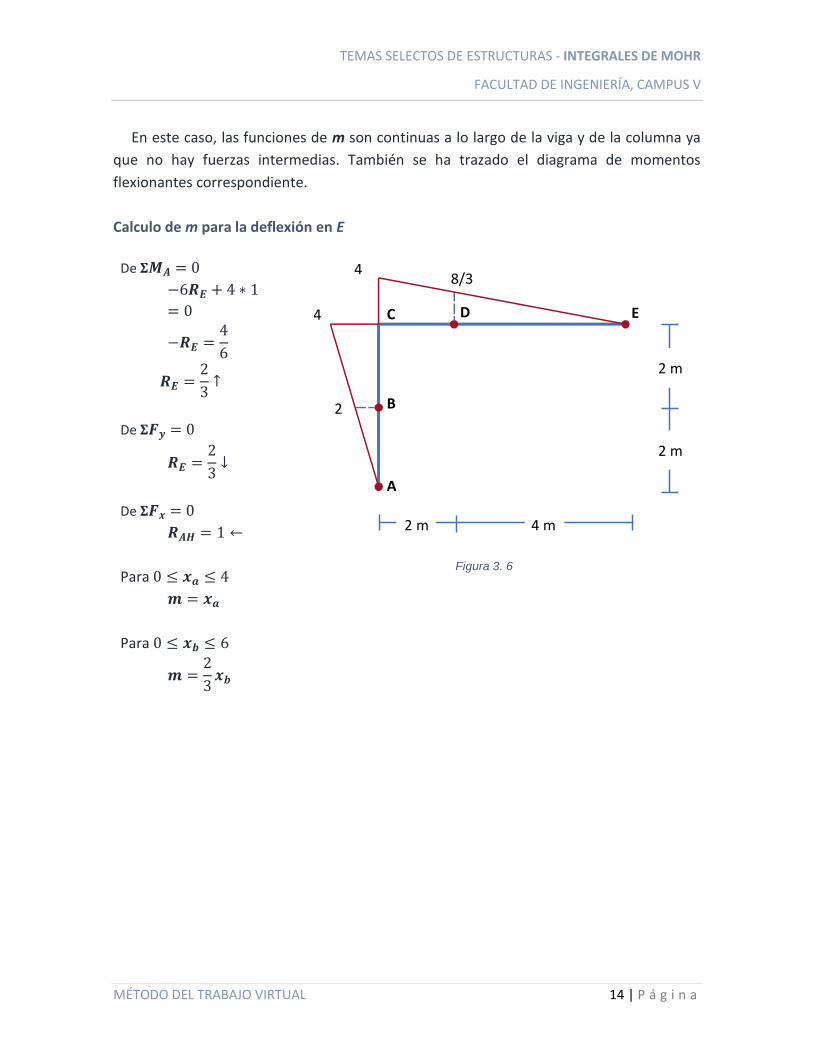
En este caso, las funciones de m son continuas a lo largo de la viga y de la columna ya
que no hay fuerzas intermedias. También se ha trazado el diagrama de momentos
flexionantes correspondiente.
Calculo de m para la deflexión en E
De 𝚺𝑴𝑨 = 0
−6𝑹𝑬 + 4 ∗ 1
= 0
−𝑹𝑬 =4
6
𝑹𝑬 =2
3↑
De 𝚺𝑭𝒚 = 0
𝑹𝑬 =2
3↓
De 𝚺𝑭𝒙 = 0
𝑹𝑨𝑯 = 1 ←
Para 0 ≤ 𝒙𝒂 ≤ 4
𝒎 = 𝒙𝒂
Para 0 ≤ 𝒙𝒃 ≤ 6
𝒎 =2
3𝒙𝒃
Figura 3. 6
8/3
2 m 4 m
2 m
2 m
4
4
A
B
C D E
2
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 15 | P á g i n a
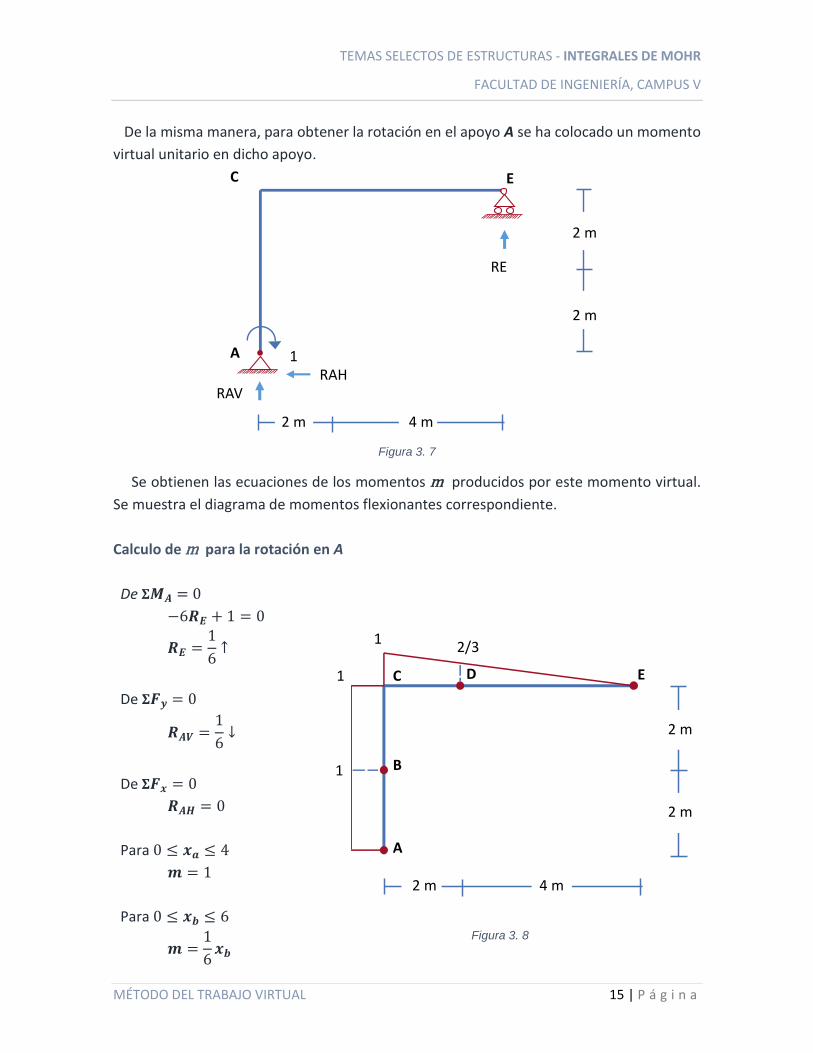
De la misma manera, para obtener la rotación en el apoyo A se ha colocado un momento
virtual unitario en dicho apoyo.
Figura 3. 7
Se obtienen las ecuaciones de los momentos m producidos por este momento virtual.
Se muestra el diagrama de momentos flexionantes correspondiente.
Calculo de m para la rotación en A
De 𝚺𝑴𝑨 = 0
−6𝑹𝑬 + 1 = 0
𝑹𝑬 =1
6↑
De 𝚺𝑭𝒚 = 0
𝑹𝑨𝑽 =1
6↓
De 𝚺𝑭𝒙 = 0
𝑹𝑨𝑯 = 0
Para 0 ≤ 𝒙𝒂 ≤ 4
𝒎 = 1
Para 0 ≤ 𝒙𝒃 ≤ 6
𝒎 =1
6𝒙𝒃
Figura 3. 8
2 m 4 m
2 m
2 m
1 A
C E
RAV
RAH
RE
2 m 4 m
2 m
2 m
2/3 1
1
A
B
C D E
1

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 16 | P á g i n a
Después se han sustituido las ecuaciones de M y de m (correspondiente a la fuerza virtual
horizontal) en la ec 1.2 para obtener la deflexión en E. Nótese que la sustitución se ha hecho
por tramos en los que no cambia ninguna de las dos funciones. Así, en la columna AC ha
sido necesario considerar dos tramos, el AB y AC, ya que la función de M no es continua en
toda la columna, aunque lo sea la de m.
1 ∗ ∆= ∫𝑚𝑀
𝐸𝐼𝑑𝑥
𝑙
0
(ec. 1. 2 )
Página 1 > Tema 1.- Principio del trabajo virtual.
Calculo de la deflexión en E
Tramo AB
∆1= ∫(10𝒙𝒂)(𝒙𝒂)
𝐸𝐼𝑑𝑥
2
0
∆1=1
𝐸𝐼∫ (10𝒙𝒂
2)𝑑𝑥2
0
∆1=1
𝐸𝐼[10
3𝒙𝒂
3]2
0
∆1=1
𝐸𝐼[10
3(23)] =
𝟏
𝑬𝑰(𝟐𝟔. 𝟔𝟕)
Tramo BC
∆2= ∫(20𝒙𝒂)𝑑𝑥
𝐸𝐼
4
2
∆2=1
𝐸𝐼∫ (20𝒙𝒂)𝑑𝑥
4
2
∆2=1
𝐸𝐼∫
20
2𝒙𝒂
24
2
∆2𝑙=1
𝐸𝐼[20
2(42)] =
160
𝐸𝐼
∆20=1
𝐸𝐼[20
2(22)] =
40
𝐸𝐼
∆2(𝑙−0)=160
𝐸𝐼−
40
𝐸𝐼=
𝟏
𝑬𝑰(𝟏𝟐𝟎)

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 17 | P á g i n a
Tramo ED
∆3= ∫(20𝒙𝒃)(
23 𝒙𝒃)
2𝐸𝐼𝑑𝑥
4
0
∆3=1
2𝐸𝐼∫ (
40
3𝒙𝒃
2) 𝑑𝑥4
0
∆3=20
3𝐸𝐼[1
3𝒙𝒃
3]4
0
∆3=20
3𝐸𝐼[1
3(43)] =
𝟏
𝑬𝑰(𝟏𝟒𝟐. 𝟐𝟐)
Tramo DC
∆4= ∫(−30𝒙𝒃 + 200)(
23 𝒙𝒃)
2𝐸𝐼𝑑𝑥
6
4
∆4=1
2𝐸𝐼∫ (−20𝒙𝒃
2 + 133.33𝒙𝒃)𝑑𝑥6
4
∆4=1
2𝐸𝐼∫
−20𝒙𝒃3
3
6
4
+133.33𝒙𝒃
2
2
∆4=1
2𝐸𝐼[−6.67𝒙𝒃
3 + 66.67𝒙𝒃2]
6
4
∆4𝑙=1
2𝐸𝐼[−6.67(63) + 66.67(62)]
=𝟏
𝟐𝑬𝑰(𝟗𝟓𝟗. 𝟗𝟒)
∆40=1
2𝐸𝐼[−6.67(43) + 66.67(42)]
=𝟏
𝟐𝑬𝑰(𝟔𝟑𝟗. 𝟗𝟑)
∆4(𝑙−0)=959.94
2𝐸𝐼−
639.93
2𝐸𝐼=
𝟏
𝑬𝑰(𝟏𝟓𝟗. 𝟕𝟖)
∆𝑻𝒐𝒕𝒂𝒍=1
𝐸𝐼(26.67 + 120 + 142.22 + 159.78) =
𝟒𝟒𝟖. 𝟔𝟕
𝑬𝑰→
En total, fue necesario hacer la integración en cuatro tramos. La deflexión total viene
siendo la suma de las cuatro integraciones. Obsérvese que en la columna se usa un
momento de inercia I, mientras que en la viga se usó 2I.
En forma semejante se calcula la rotación en A sustituyendo las funciones de M y de m
(correspondiente al momento virtual unitario) en la ec 1.3.
1 ∗ 𝜃 = ∫𝑚𝜃𝑀
𝐸𝐼𝑑𝑥
𝑙
0
(ec. 1. 3 )
Página 1 > Tema 1.- Principio del trabajo virtual.

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 18 | P á g i n a
Calculo de la rotación en A
Tramo AB
𝜃1 = ∫(10𝒙𝒂)(1)
𝐸𝐼𝑑𝑥
2
0
𝜃1 =1
𝐸𝐼∫ (10𝒙𝒂)𝑑𝑥
2
0
==1
𝐸𝐼∫
10𝒙𝒂2
2
2
0
𝜃1𝜃1 =1
𝐸𝐼[5𝒙𝒂
2]2
0
𝜃1 =1
𝐸𝐼[5(22)] =
𝟏
𝑬𝑰(𝟐𝟎)
Tramo BC
𝜃2 = ∫20 ∗ 1
𝐸𝐼𝑑𝑥
4
2
𝜃2 =1
𝐸𝐼∫ 20𝑥
4
2
=1
𝐸𝐼[20𝑥]
4
2
𝜃2𝑙 =1
𝐸𝐼[20(4)] =
𝟏
𝑬𝑰(𝟖𝟎)
𝜃20 =1
𝐸𝐼[20(2)] =
𝟏
𝑬𝑰(𝟒𝟎)
𝜃2(𝑙−0) =80
𝐸𝐼−
40
𝐸𝐼=
𝟏
𝑬𝑰(𝟒𝟎)
Tramo ED
𝜃3 = ∫(20𝒙𝒃)(
16 𝒙𝒃)
2𝐸𝐼𝑑𝑥
4
0
𝜃3 =1
2𝐸𝐼∫ (
20
6𝒙𝒃
2) 𝑑𝑥4
0
𝜃3
1
2𝐸𝐼=
1
2𝐸𝐼∫ (
10
3𝒙𝒃
2) 𝑑𝑥4
0
𝜃3 =1
2𝐸𝐼∫ (3.33𝒙𝒃
2)𝑑𝑥4
0
𝜃3 =1
2𝐸𝐼∫
3.33𝒙𝒃3
3
4
0
𝜃3 =1
2𝐸𝐼[3.33𝒙𝒃
3
3]
4
0
𝜃3 =1
2𝐸𝐼[3.33(43)
3] =
𝟏
𝑬𝑰(𝟑𝟓. 𝟓𝟐)
Tramo DC
𝜃4 = ∫(−30𝒙𝒃 + 200)(
16 𝒙𝒃)
2𝐸𝐼𝑑𝑥
6
4
𝜃4 =1
2𝐸𝐼∫ (−5𝒙𝒃
2 + 33.33𝒙𝒃)𝑑𝑥6
4
𝜃4 =1
2𝐸𝐼[−
5
3𝒙𝒃
3 +33.33 𝒙𝒃
2
2]
6
4
𝜃4𝑙 =1
2𝐸𝐼[−
5
3(63) +
33.33
2(62)]
𝜃4𝑙 =𝟏
𝟐𝑬𝑰(𝟐𝟑𝟗. 𝟗𝟒)
𝜃40 =1
2𝐸𝐼[−
5
3(43) +
33.33
2(42)]
𝜃40 =𝟏
𝟐𝑬𝑰(𝟏𝟔𝟎)
𝜃4(𝑙−0) =239.94
2𝐸𝐼−
160
2𝐸𝐼=
𝟏
𝑬𝑰(𝟒𝟎. 𝟎𝟑)
𝜽𝑻𝒐𝒕𝒂𝒍 =1
𝐸𝐼(20 + 40 + 35.55 + 40.03) =
𝟏𝟑𝟓. 𝟓𝟖
𝑬𝑰
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 19 | P á g i n a
4. Resolución de marcos por el método de Mohr.
Para obtener los valores de las tablas de Mohr, la integral calcula el producto del área
del grafico M por el grafico m. Es necesario tener en cuenta que la ordenada de M se escoge
siempre en el grafico rectilíneo. En el caso particular, cuando los dos gráficos son rectilíneos,
se puede multiplicar el área de cualquiera de ellos por la correspondiente ordenada del
otro. Cuando se trata de cargas corrientes compuestas por momentos concentrados
exteriores, fuerzas concentradas y cargas uniformemente distribuidas, entonces cualquier
grafico de momentos se puede descomponer en gráficos simples de tipo rectangular,
triangular y parabólico de segundo orden.
Para acelerar los cálculos emplearemos la tabla de los productos de los gráficos para
resolver el ejemplo 2.1a.
Ejemplo 2.1b
Los primeros pasos son los mismos, por lo que no se repiten en este ejemplo. Es decir,
se obtienen las ecuaciones de los momentos M, de los momentos m correspondientes a la
carga virtual en E y de los momentos m correspondientes al momento virtual en A. También
se obtienen los diagramas de momentos flexionantes correspondientes a estas ecuaciones
trazados en las figuras 3.4, 3.6 y 3.8 respectivamente.
Figura 3.4 Página 13 > Tema 3.- Deflexiones y rotaciones en marcos por el método de trabajo virtual.
Momento flexionante real en el marco
80
2m 4m
2m
2m
20
20
A
B
C D E
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 20 | P á g i n a
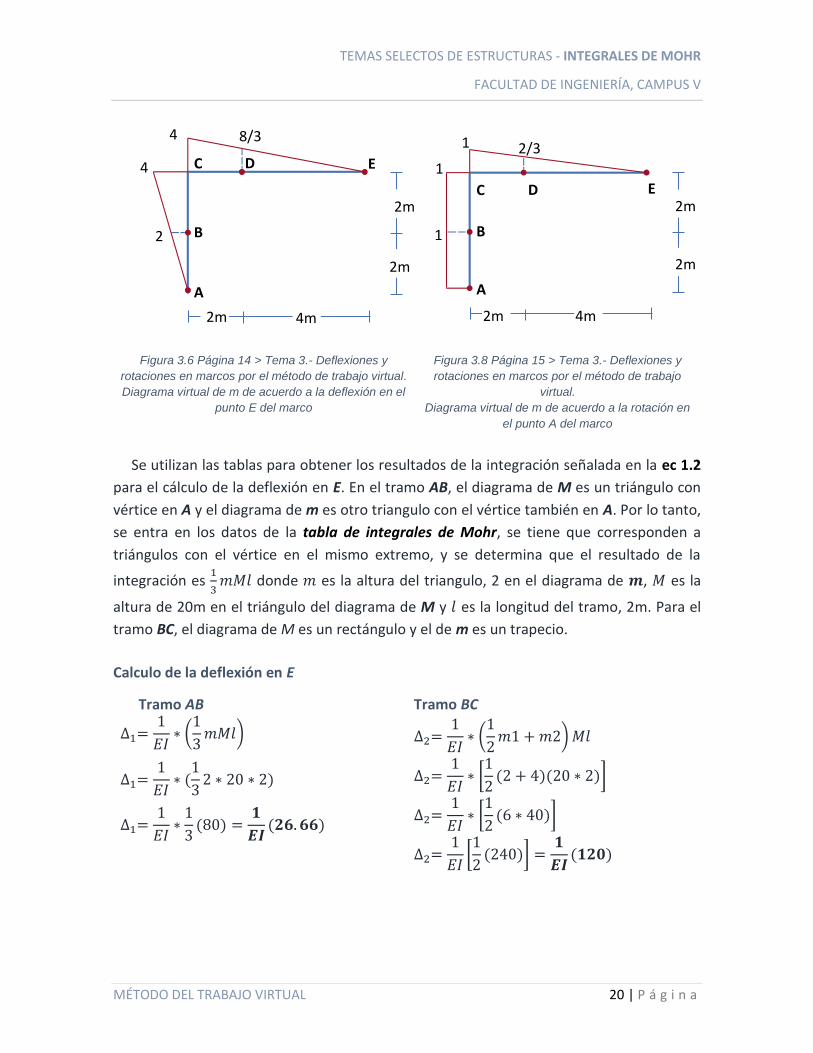
Figura 3.6 Página 14 > Tema 3.- Deflexiones y
rotaciones en marcos por el método de trabajo virtual.
Diagrama virtual de m de acuerdo a la deflexión en el
punto E del marco
Figura 3.8 Página 15 > Tema 3.- Deflexiones y
rotaciones en marcos por el método de trabajo
virtual.
Diagrama virtual de m de acuerdo a la rotación en
el punto A del marco
Se utilizan las tablas para obtener los resultados de la integración señalada en la ec 1.2
para el cálculo de la deflexión en E. En el tramo AB, el diagrama de M es un triángulo con
vértice en A y el diagrama de m es otro triangulo con el vértice también en A. Por lo tanto,
se entra en los datos de la tabla de integrales de Mohr, se tiene que corresponden a
triángulos con el vértice en el mismo extremo, y se determina que el resultado de la
integración es 1
3𝑚𝑀𝑙 donde 𝑚 es la altura del triangulo, 2 en el diagrama de 𝒎, 𝑀 es la
altura de 20m en el triángulo del diagrama de M y 𝑙 es la longitud del tramo, 2m. Para el
tramo BC, el diagrama de M es un rectángulo y el de m es un trapecio.
Calculo de la deflexión en E
Tramo AB
∆1=1
𝐸𝐼∗ (
1
3𝑚𝑀𝑙)
∆1=1
𝐸𝐼∗ (
1
32 ∗ 20 ∗ 2)
∆1=1
𝐸𝐼∗
1
3(80) =
𝟏
𝑬𝑰(𝟐𝟔. 𝟔𝟔)
Tramo BC
∆2=1
𝐸𝐼∗ (
1
2𝑚1 + 𝑚2) 𝑀𝑙
∆2=1
𝐸𝐼∗ [
1
2(2 + 4)(20 ∗ 2)]
∆2=1
𝐸𝐼∗ [
1
2(6 ∗ 40)]
∆2=1
𝐸𝐼[1
2(240)] =
𝟏
𝑬𝑰(𝟏𝟐𝟎)
8/3
2m 4m
2m
2m
4
4
A
B
C D E
2
2m 4m
2m
2m
2/3 1
1
A
B
C D E
1

TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 21 | P á g i n a
De manera similar, para el tramo ED hay que combinar dos triángulos con el vértice en
el mismo extremo, y para el tramo DC, dos trapecios.
Tramo ED
∆3=1
2𝐸𝐼∗
1
3𝑚𝑀𝑙
∆3=1
2𝐸𝐼∗
1
3(4 ∗ 80 ∗
8
3)
∆3=1
2𝐸𝐼[1
3(853.33]
∆3=𝟏
𝑬𝑰(𝟏𝟒𝟐. 𝟐𝟐)
Tramo DC
∆4=1
2𝐸𝐼∗
1
6[𝑚1(2𝑀1 + 𝑀2) + 𝑚2(𝑀1 + 2𝑀2)]𝑙
∆4=1
2𝐸𝐼∗
1
6[2(20 ∗ 4) + 20 ∗
2
3+ 80 ∗ 4 + 2(80 ∗
8
3)] 2
∆4=1
2𝐸𝐼∗
1
6[2(80) + 53.33 + 320 + 426.66]2
∆4=1
2𝐸𝐼∗
1
6(960) =
𝟏
𝑬𝑰(𝟏𝟔𝟎)
Con el mismo procedimiento se ha calculado la rotación en A, combinando por tramos
los diagramas de M y de m para momento virtual unitario en A.
Calculo de la rotación en A
Tramo AB
𝜃1 =1
𝐸𝐼∗
1
2𝑚𝑀𝑙
𝜃1 ==𝟏
𝑬𝑰(𝟐𝟎)
Tramo BC
𝜃2 =1
𝐸𝐼∗ 𝑚𝑀𝑙
𝜃2 =1
𝐸𝐼∗ (1 ∗ 20 ∗ 2) =
𝟏
𝑬𝑰(𝟒𝟎)
Tramo ED
𝜃3 =1
2𝐸𝐼∗
1
3𝑚𝑀𝑙
𝜃3 =1
2𝐸𝐼∗
1
3(4 ∗
2
3∗ 80)
𝜃3 =𝟏
𝑬𝑰(𝟑𝟓. 𝟓𝟓)
Tramo DC
𝜃4 =1
2𝐸𝐼∗
1
6[𝑚1(2𝑀1 + 𝑀2) + 𝑚2(𝑀1 + 2𝑀2)]𝑙
𝜃4 =1
2𝐸𝐼∗
1
6[1(2 ∗ 20 + 80) +
2
3(20 + 2 ∗ 80)2]
𝜃4 =1
2𝐸𝐼∗
1
6[120 + 2/3(80)]2 =
𝟏
𝑬𝑰(𝟒𝟎)
Tanto para la deflexión como para la rotación, los valores calculados son iguales a los del
ejemplo 2.1a, excepto por los ajustes en los decimales.
∆𝑻𝒐𝒕𝒂𝒍=1
𝐸𝐼(26.67 + 120 + 142.22 + 159.78) =
𝟒𝟒𝟖. 𝟔𝟕
𝑬𝑰→
𝜽𝑻𝒐𝒕𝒂𝒍 =1
𝐸𝐼(20 + 40 + 35.55 + 40.03) =
𝟏𝟑𝟓. 𝟓𝟖
𝑬𝑰
TEMAS SELECTOS DE ESTRUCTURAS - INTEGRALES DE MOHR
FACULTAD DE INGENIERÍA, CAMPUS V
MÉTODO DEL TRABAJO VIRTUAL 22 | P á g i n a
Bibliografía
1. Nelson James – McCormac Jack. Análisis de estructuras. Editorial Alfaomega. 3ra
edición. ISBN 970-15-1118-2. México, 2006. – 582p.
2. Gonzalez Cuevas Oscar M. Análisis estructural Grupo Editorial Limusa. 2da Edición.
ISBN 958-7240-13-0. México, 2002. – 580p.
3. Hibbeler R. Analisis Estructural. Editorial Pearson. 8va Edición. ISBN 978-60732-
1062. Mexico, 2012. –720p.
4. Pytel Andrew – Singer Ferdinand. Resistencia de materiales. Editorial Oxford. 4ta
edición. ISBN 970-15-1056-9. México, 2006. – 584p.
5. Villarreal Castro Genner. Análisis estructural. 1ra Edición. ISBN 978-9972-33-657-7.
Lima, 2008. – 335p.
6. Villarreal Castro Genner. Resistencia de materiales. 1ra Edición. 978-9972-33-910-
0. Lima, 2006. – 331p.
7. Apuntes de Análisis Estructural I
8. Miguel Cervera Ruiz – Elena Blanco Díaz. Mecánica de estructuras. Método de
análisis. Edición IPC. ISBN 84-8301-623-0. CPET, 2002. – 342p.
9. Ricardo Herrara M. CI4202: Análisis Estructural.
10. Escuela Politécnica de Mieres. Apuntes de Cálculo de Estructuras.





























