Embed Size (px)
Citation preview

CWP-754
Improving microseismic imaging: role of acquisition,
velocity model, and imaging condition
Jyoti Behura†, Farnoush Forghani‡, & Farhad Bazargani††Center for Wave Phenomena, Colorado School of Mines, Golden, Colorado‡Center for Rock Abuse, Colorado School of Mines, Golden, Colorado; currently MicroSeismic Inc, Denver
ABSTRACT
Surface microseismic data is being increasingly used in monitoring hydraulic-fracturing. Here, we suggest changes in the acquisition as well as processingstages to improve microseismic imaging and source characterization. Improvedmicroseismic hypocenter imaging and reliable source mechanism estimation canbe achieved by illuminating the hypocenter evenly from all directions. We intro-duce methodologies for designing optimized surface arrays for 2D and 3D acqui-sitions. Accurate microseismic imaging also requires the exact Green’s functionbetween the image point and the receivers. An inaccurate Green’s function leadsto poor focusing and numerous spurious microseismic hypocenters. We also in-troduce imaging conditions that can yield accurate source signatures even ifthey are extended in space and time. Such source signatures can yield the timehistory of fracture propagation in space and might be used to infer the time-varying slip along pre-existing fractures. These imaging conditions also reducespurious events in the image. All conclusions are supported with numerical ex-amples.
1 INTRODUCTION
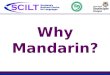
Microseismic monitoring using surface arrays is becom-ing increasingly popular because of its reduced cost andincreased aperture compared to borehole monitoring.Surface microseismic data is commonly acquired usinga star-shaped array (Duncan & Eisner, 2010, Figure 1)or on a regular grid. These receivers can be placed onthe surface or can be buried in the ground to improvethe signal-to-noise ratio. Little attention is paid towardsdesigning the array to optimize imaging using a fixednumber of receivers. Therefore, optimizing a survey de-sign can not only lead to better microseismic charac-terization but also result in cost savings. In fact, it isnowadays routine to perform illumination studies in or-der to design the best acquisition surveys in conven-tional reflection seismology. Here, we discuss how sur-face microseismic arrays can be designed to yield betterhypocenter imaging.
Other important aspects of microseismic imaginginvolve the choice of imaging condition and the knowl-edge of the exact Green’s functions between the im-age point and the receivers. The recorded data areimaged through a Kirchhoff-summation based algo-rithm (Gajewski et al., 2007) or a reverse-time approach(McMechan, 1982; McMechan et al., 1983; Fink et al.,
2000; Lu, 2002) with the primary aim being the loca-tion of microseismic hypocenters. Reverse-time imagingand Kirchhoff-summation based algorithms commonlyuse a smooth velocity model for imaging and thereforemight not yield an accurate Green’s function. We dis-cuss the importance of an accurate subsurface modeland its impact on imaging microseismic data.
Recent developments by Ulrich et al. (2013),Douma et al. (2013) and Bazargani & Snieder (2013)show that better temporal and spatial focusing can beachieved by designing optimal inverse-filters from therecorded data which are then back-propagated througha velocity model. Here, instead of optimizing the focus-ing of the microseismic data, we compute the sourcesignature of the microseismic events. Imaging of mi-croseismic data commonly refers to the reconstructionof the hypocenters of the microseismic sources. There-fore, microseismic images are usually displayed only as afunction of the spatial axes. Microseismic sources, how-ever, are functions of time as well. For example, it ismost likely that the opening of a fracture is not instan-taneous; instead different portions of the fracture likelyopen at different times resulting in a microseismic sourceextended both in space and time. Another example ofsuch sources would be microseismic tremors that occur

78 J. Behura & F. Forghani
Figure 1. Plan-view of star-shaped surface microseismicarray. The blue lines represent the receiver arrays. Source:
Duncan & Eisner (2010).
due to the slow slippage along a fault or fracture plane.Hence, by microseismic imaging we refer to the processof finding the microseismic source signature as a func-tion of both space and time. By computing the sourcesignatures as a function of time and space, we can inferthe time history of fracture propagation in space andthe time-dependent slip along natural fractures. There-fore, we introduce and analyze different imaging condi-tions that look for coherence in time as well as space be-tween the computed Green’s functions and the recordeddata and test their effectiveness in imaging microseismicdata. Our approach is particularly useful for microseis-mic sources that are extended in time and space.
2 SURFACE ACQUISITION
In order to obtain the best possible focus through imag-ing and also decipher the source radiation pattern ac-curately, one needs to sample the hypocenter evenlyfrom all angles. In other words, the hypocenter mustbe evenly illuminated from all directions. If the mi-croseismic source is imaged using plane waves evenlyspaced in angle (Figure 2a), one can obtain an evenlyilluminated image. However, neither a star-shaped sur-face array nor a regular-grid array would illuminate thehypocenter evenly from all directions. Instead, such re-ceiver arrays will lead to the preferential illumination ofcertain angles (Figure 2b) thereby resulting in X-shapedhypocenter images. More importantly, such uneven an-gular sampling of the hypocenter might lead to an in-correct estimation of the source radiation pattern.
(a) (b)
Figure 2. Hypocenter reconstruction using plane waves (a)evenly incident from all directions and (b) incident from re-ceivers evenly spread along a line on the surface.
(a)
(b)
Figure 3. 2D surface array for optimized design (a) andconventional design (b). The optimized array is designed fora hypocentral depth of 1800 m, maximum offset of 6000 mand a constant velocity gradient of ≈1.3 s−1.
2.1 Optimal design
Here, we suggest using a modified surface array de-signed with the aim of illuminating the microseismichypocenters evenly from all directions. To design suchan array one needs an approximate smooth velocitymodel of the subsurface, approximate center of thezone of microseismicity, maximum receiver offset, andthe number of receivers. A practical solution wouldbe to use a constant vertical velocity-gradient of thesubsurface being monitored. Since most unconventionalreservoirs undergoing hydraulic fracturing are fairlylaterally-homogeneous, a well-log could be used to findthe best-fit vertical velocity gradient. The mid-point ofthe hydraulically-fractured zone can be used for the cen-ter of the microseismicity-zone. By knowing the maxi-mum offset and the number of receivers, one can shootrays from the microseismicity-zone-center at equally-spaced (in angle) takeoff angles. The intersection ofthese rays with the surface determine the optimal lo-cations of the surface receivers. For such simple ve-locity models, one can use analytic ray-path formula-tions for determining the location of the surface re-ceivers; for more complicated models, one can use ray-tracing. Such a modified design was also proposed byFoulger & Julian (2011); Miller et al. (1998) with theabove aim in mind (sampling the hypocenter evenlyin angle). Miller et al. (1998) used ray-tracing to op-

Microseismic acquisition & imaging 79
(a)
(b)
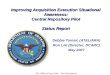
Figure 4. (a) Geodesic grid used in sampling theimaginary sphere surrounding the hypocenter. (b) Icosa-hedron that is divided to construct a geodesic grid.Source: Geodesic polyhedra, Rene K. Muller
timally place receiver stations on the surface to monitora geothermal site.
The computation of these evenly-spaced (in takeoffangle) rays is straightforward in 2D where the polar an-gle at the hypocenter has to be divided into n−1 angularsectors with n being the number of surface receivers. Anexample of an optimal 2D surface receiver array is shownin Figure 3a; a conventional array (equally spaced onthe surface) is also shown in Figure 3b for comparison.For 3D acquisition design, however, the computation ofthe equi-spaced takeoff angles is more involved becausethe whole sphere around the hypocenter needs to beevenly sampled (instead of the circular aperture in 2D).
Figure 5. Plan view of the optimized surface acquisition in3D. The optimized array is designed for a hypocentral depth
of 1800 m, maximum offset of 6000 m and a constant velocity
gradient of ≈1.3 s−1.
Miller et al. (1998) and Foulger & Julian (2011) use theintersection points of the latitudes with the longitudes ofa sphere to determine the azimuth and take-off angle ofeach ray. Their approach, however, will not sample thesphere evenly; it will lead to finer sampling of pointsnear the poles and sparse-sampling of points close tothe equator. Here, we use a geodesic grid (Figure 4a) todetermine the azimuth and takeoff angles of the rays be-cause the sphere surrounding the hypocenter is sampledevenly on a geodesic grid. Depending on the number ofreceivers, an icosahedron (Figure 4b) is divided evenlyto yield a geodesic grid. The vertices of the geodesic gridyield the azimuth and takeoff angles of the rays. As de-scribed above, intersection of these rays (shot from thehypocenter at the computed azimuth and takeoff an-gles) with the surface determines the optimal locationsof the receivers. An example of such an optimal 3D mi-croseismic survey is shown in Figure 5. Note the markeddifference in the optimal receiver pattern from that of astar-shaped array and a regular-grid array.
The instrumentation of borehole receiver stringsprevents me from suggesting the above optimized re-ceiver spacing for borehole acquisition. However, if mul-tiple strings are used in monitoring microseismicity, onecould still use the above optimization scheme to design aborehole acquisition geometry that illuminates the zoneof microseismicity evenly from all directions.

80 J. Behura & F. Forghani
(a) (b)
(c) (d)
Figure 6. (a,b) Hypocenter images obtained using the optimized (Figure 3a) and the conventional (Figure 3b) 21-receiverarray, respectively. (c,d) Images obtained from increased number of receivers (161).
2.2 Imaging
An acquisition design optimized to illuminate thehypocenter evenly from all directions should yield bet-ter images of the microseismic source. Images in Fig-ures 6a and 6b are obtained using reverse-time imagingof the microseismic data acquired on an optimized ar-ray (Figure 3a) and a conventional array (Figure 3b),respectively. Note that the event focusing is better inFigure 6a than in Figure 6b. The individual plane wavesforming the focus at the hypocenter are also visible. Asexpected, the plane waves in Figure 6a are evenly spacedin angle while in Figure 6b, they are unevenly spacedand concentrated at specific angles. Increasing the num-ber of receivers increases the image quality (Figures 6cand 6d) for both acquisitions; however, the uneven illu-mination of the conventional acquisition still leads to anX-shaped image in Figure 6d. Note the similarity of Fig-ures 6c and 6d to the plane-wave schematic in Figure 2aand 2b, respectively.
3 IMPORTANCE OF THE SUBSURFACE
MODEL
Reverse-time imaging (McMechan, 1982;McMechan et al., 1983; Lu, 2002) of microseismicdata involves time-reversal of the data and theirre-injection into a smooth velocity model. Followingback-propagation, an imaging condition is appliedwhich is usually some snapshot of the back-propagatedwavefield at some time that is thought to be theinitiation time of the microseismic source. Reverse-timeimaging can, therefore, be written as
I(ω;xs) =
[
∑
xr
d∗(ω;xr)Gs(ω;xs,xr)
]∗
=
[
∑
xr
S∗(ω;xs)G
∗(ω;xr,xs)Gs(ω;xs,xr)
]∗
= S(ω;xs)
[
∑
xr
G∗(ω;xr,xs)Gs(ω;xs,xr)
]∗
(1)

Microseismic acquisition & imaging 81
(a)
X (km)
Z (
km)
0 2 4 6 8 10 12
0
1
2
km/s
3
4
5
6
7
(b)
X (km)
Z (
km)
0 2 4 6 8 10 12
0
1
2
km/s
3
4
5
6
7
Figure 7. (a) The layer-cake velocity model used in generating borehole microseismic data. The pentagram represents thehypocenter of the microseismic source and the red triangles represent the borehole receivers. The borehole receivers are emplacedas two vertical receiver arrays. Each array comprises of 11 receivers evenly spaced at 20 m intervals. (b) Smoothed version of
(a).
where I(ω;xs) is the image at image point xs, xr repre-sent the receiver coordinates, ω is the frequency, ∗ repre-sents complex conjugation, d is the microseismic data, Gis the true Green’s function, Gs is the Green’s functioncomputed during back-propagation in a smooth back-ground velocity, and S is the source signature at imagepoint xs.
Ideally we would like equation 1 to yield the truesource signature at location xs i.e. I(ω;xs) = S(ω;xs).This means that in order to get the best possible im-age, Gs should be equal to G. This can be achievedby using the exact velocity (and density) model forback-propagation of the recorded data. For example, thewell-log derived velocity (and density) could be usedfor back-propagation in laterally-homogeneous media.If a smooth model is used instead, the image (Fig-ure 8a) could be substantially different from the trueimage (Figure 8b). In the absence of a detailed and ac-curate velocity model, an alternate approach suggestedby Behura & Snieder (2013) could be used. It is note-worthy that even if the true Green’s function is used
in equation 1, reverse-time imaging will yield a sourcesignature that is scaled by
∑
xr
|G|2; therefore, the image
obtained using reverse-time imaging will not be accu-rate unless the subsurface velocity and density are ac-tually slowly varying such that |G|2 = δ, where δ is theKronecker delta.
4 IMAGING CONDITIONS
In order to obtain accurate source signatures of micro-seismic sources, we need to modify the imaging condi-tion used in reverse-time imaging (equation 1). The mi-croseismic data recorded at receiver xr due to a sourceat some location xs is given by
d(ω;xr,xs) = S(ω;xs)G(ω;xr,xs), (2)
where ω is the frequency, d(ω;xr,xs) is the data at re-ceiver xr, S(ω;xs) is the source signature at xs, and G
is the Green’s function between the source location xs
and the receiver location xr. Note that equation 2 is de-

82 J. Behura & F. Forghani
(a)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
(b)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
Figure 8. Reverse-time images of the microseismic source in Figure 7a using (a) the smoothed model (Figure 7b) and (b) thecorrect velocity model (Figure 7a).
fined only for a single microseismic source for simplicity;use of multiple sources will introduce undesirable cross-talk in the images. The source signature can then becomputed from equation 2 using
S(ω;xs) =d(ω;xr,xs)
G(ω;xr,xs). (3)
S(ω;xs) in equation 3 is the source signature estimateusing data from only a single receiver. In the case ofmultiple receivers, one can sum over the estimates fromall the receivers:
S(ω;xs) =∑
xr
d(ω;xr,xs)
G(ω;xr,xs). (4)
Equation 4 is a deconvolution operation followed by asummation over all the receivers. One needs to performa stabilized deconvolution in equation 4 such as thewater-level deconvolution (Aster et al., 2012). Examplesof the image resulting from the imaging condition 4 ap-plied to the data in Figure 7a are shown in Figure 9a.Note that the above methodology is different from thatof Ulrich et al. (2013) and Douma et al. (2013) who de-sign inverse-fiters using deconvolution that improve thefocusing of the time-reversed data in time and space.
To avoid the deconvolution operation, equation 4can be modified to
S(ω;xs) =∑
xr
d(ω;xr,xs)G∗(ω;xr,xs), (5)
where ∗ represents complex conjugation. Equation 5represents a cross-correlation operation between d andG. Note that |G|2 has been omitted going from equa-tion 4 to equation 5 for stabilization purposes. Omissionof |G|2 will incorporate inaccuracies in the amplitude
spectrum of the source signature; therefore, althoughimaging condition 5 might yield the correct phase ofthe microseismic source, its amplitude will be inaccu-rate unless |G|2 = δ. If a smooth velocity model is usedfor back-propagation, equation 5 becomes the cross-correlation imaging condition 1 used in reverse-timeimaging. Figure 9b shows the image resulting from thecross-correlation imaging condition 5.
In the presence of multiple microseismic sources ex-tended in space, imaging conditions 4 and 5 will re-sult in cross-talk between the various sources and mightyield degraded images. Also, in the above two imag-ing conditions (equation 4 and 5), the source signa-tures are computed for each receiver independently andthen stacked. In other words, imaging conditions 4 and5 use only the temporal coherence between the datarecorded at a receiver with the computed Green’s func-tion. It might be possible to reduce cross-talk and im-prove imaging by exploiting spatial coherence in ad-dition to temporal coherence. Hence, we modify equa-tions 4 and 5 by performing a Fourier transform on thespatial receiver axis to obtain
S(ω;xs) =∑
kr
d(ω; kr,xs)
G(ω; kr,xs), (6)
and
S(ω;xs) =∑
kr
d(ω; kr,xs)G∗(ω; kr,xs), (7)
respectively; kr is the wavenumber computed over thereceiver coordinates. Images resulting from imaging con-ditions 6 and 7 are shown in Figures 9c and 9d, respec-tively.

Microseismic acquisition & imaging 83
Equation 2 can also be written as a linear systemof algebraic equations
d = GS. (8)
The least-squares solution (Aster et al., 2012) for S
from the equation 8 is given by
SL2= (GTG)−1
GTd, (9)
where GT represents the conjugate transpose of G.Equation 9 is solved for each frequency independently toobtain S(ω) at every image point of interest. [Note thatthe above inversion approach in equation 9 is differentfrom that of Bazargani & Snieder (2013) who design in-jection sources (to be injected at the receiver locations)that optimally focus the microseismic event at a prede-fined time and space.] The image obtained from imagingcondition 9 is shown in Figure 9e.
Note that the above imaging conditions result inimages that are extended in time; images extended inspace can be obtained by varying the image point xs.This is different from conventional imaging conditionswhere a zero-time imaging condition is applied to theback-propagated wavefield. Such an imaging conditionassumes that we know the initiation time of the micro-seismic source and that the source is compact in time.However, as discussed above, microseismic sources canbe extended both in space and time (for example, mi-croseismic tremors); therefore, the imaging conditionsintroduced above should lead to a better characteriza-tion of microseismicity.
We also demonstrate the above imaging conditionson the Sigsbee model (Figure 10a). The microseismicsurvey comprises of 367 receivers spread on the surfaceat an equal spacing of 75 ft. Two microseismic sources(Figure 10a) are used for generating the data; the initi-ation times of the left- and the right-source are 0.096 sand 3.36 s, respectively. Also, the left source has a higheramplitude than the right source. For imaging, we usethe smoothed velocity model shown in Figure 10b. Theexact Green’s functions necessary for imaging are gen-erated using the algorithm of Behura & Snieder (2013).The resulting images obtained from the above five imag-ing conditions are shown in Figure 11. The images corre-spond to a depth of 5700 ft. All five imaging conditionsreconstruct the source accurately at their correct timesand spatial location. However, imaging condition 7 con-tains the least artifacts (Figure 11d). Overall, Figures 9and 11 show that imaging conditions 6, 7, and 9 yieldthe best images while minimizing false positives.
5 DISCUSSION AND CONCLUSIONS
Microseismic imaging can be improved by evenly illumi-nating the hypocenters from all directions. The modi-fied surface acquisition suggested here results in uniformsampling of microseismic hypocenters and better imagesas corroborated by synthetic examples.
The optimized surface acquisition design intro-duced has to be designed with a specific imaging zone inmind. Subsequently, microseismic hypocenters locatedfar away from this imaging zone might not be opti-mally illuminated using the modified design. Still, mostof the microseismicity is confined to the vicinity of thehydraulically-fractured zone which makes the optimizeddesign useful.
The time-space imaging conditions discussed hereyield good images and minimize spurious events on theimage at the same time. These time-space imaging con-ditions exploit the similarity of the acquired data withthe computed Green’s function in both time and space.An accurate and detailed velocity model is also ex-tremely important in imaging and reducing false pos-itives in microseismic analysis.
ACKNOWLEDGMENTS
Mark Willis and Julie Shemeta were very helpful in clar-ifying many of our questions. Support for this work wasprovided by the Consortium Project on Seismic InverseMethods for Complex Structures at Center for WavePhenomena and by the sponsors of the Center for RockAbuse.
References
Aster, R. C., Borchers, B., & Thurber, C. H. 2012.Parameter Estimation and Inverse Problems. 2 edn.Academic Press.
Bazargani, F., & Snieder, R. 2013. Optimal wave fo-cusing. CWP Project Review, 769, 249–258.
Behura, J., & Snieder, R. 2013. Imaging direct- as wellas scattered-events in microseismic data using inversescattering theory. CWP Project Review, 755, 87–94.
Douma, J., Snieder, R., Fish, A., & Sava, P. 2013. Lo-cating a microseismic event using deconvolution. sub-mitted to Geophysical Research Letters.
Duncan, P., & Eisner, L. 2010. Reservoir character-ization using surface microseismic monitoring. Geo-
physics, 75(5), 75A139–75A146.Fink, M., Cassereau, D., Derode, A., Prada, C., Roux,P., Tanter, M., J.-L.Thomas, & Wu, F. 2000. Time-reversed acoustics. Reports on Progress in Physics,63(12), 1933.
Foulger, G., & Julian, B. 2011. Earthquakes and er-rors: Methods for industrial applications. Geophysics,76(6), WC5–WC15.
Gajewski, D., Anikiev, D., Kashtan, B., Tessmer, E.,& Vanelle, C. 2007. Localization of seismic eventsby diffraction stacking. SEG Technical Program Ex-
panded Abstracts, 1287–1291.Lu, R. 2002. Time reversed acoustics and applications
to earthquake location and salt dome ank imaging.Ph.D. thesis, Massachusets Institute of Technology.

84 J. Behura & F. Forghani
(a)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
(b)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
(c)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
(d)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
(e)
X (km)
Z (
km)
2 3 4 5 6 7 81.5
2
Figure 9. Images of the microseismic source in Figure 7a obtained using imaging condition 4 (a), 5 (b), 6 (c), 7 (d), and 9 (e).
McMechan, G. A. 1982. Determination of sourceparameters by wavefield extrapolation. Geophysical
Journal of the Royal Astronomical Society, 71, 613–628.
McMechan, G. A., Luetgert, J. H., & Mooney, W. D.1983. Imaging of earthquake sources in Long ValleyCaldera, California. Bulletin of the Seismological So-
ciety of America, 75, 1005–1020.

Microseismic acquisition & imaging 85
(a)
X (kft)
Z (
kft)
0 5 10 15 20 250
5
10
kft/s
6
8
10
12
14
(b)
X (kft)
Z (
kft)
0 5 10 15 20 250
5
10
kft/s
6
8
10
12
14
Figure 10. (a) The Sigsbee velocity model used in generating the microseismic data and the reflection seismic data. The twopentagrams represent the microseismic hypocenters and the red triangles represent the receivers. The initiation time of the twosources is There are a total of 367 receivers spread on the surface at an equal spacing of 75 ft. (b) The smooth model used in
imaging.
Miller, A D, Julian, B R, & Foulger, G R. 1998.Three-dimensional seismic structure and moment ten-sors of non-double-couple earthquakes at the Hengill-Grensdalur volcanic complex, Iceland. Geophysical
Journal International, 133(2), 309–325.Ulrich, T. J., Douma, J., Anderson, B. E., & Snieder,R. 2013. Improving time reversal focusing and sourcereconstruction through deconvolution. submitted to
the Journal of Applied Physics.

86 J. Behura & F. Forghani
(a)
X (kft)
t (s)
10 12 14 16 18 20 22 240
0.5
1
1.5
2
2.5
3
3.5
4
(b)
X (kft)
t (s)
10 12 14 16 18 20 22 240
0.5
1
1.5
2
2.5
3
3.5
4
(c)
X (kft)
t (s)
10 12 14 16 18 20 22 240
0.5
1
1.5
2
2.5
3
3.5
4
(d)
X (kft)
t (s)
10 12 14 16 18 20 22 240
0.5
1
1.5
2
2.5
3
3.5
4
(e)
X (kft)
t (s)
10 12 14 16 18 20 22 240
0.5
1
1.5
2
2.5
3
3.5
4
(f)
x
z
t
Figure 11. Images of the microseismic source in Figure 10a obtained using imaging condition 4 (a), 5 (b), 6 (c), 7 (d), and 9(e). The images correspond to a depth of 5700 ft. (f) Depiction of the image slices displayed in (a)-(e).