Embed Size (px)
Citation preview
Implementation of B-Spline Based Finite Element Analysis
for the Boundary-Value Problem
Andrew J. Marker
A project submitted to the faculty of
Brigham Young University in partial fulfillment of the requirements for the degree of
Master of Science
Michael A. Scott, Chair Richard J. Balling Norman L. Jones
Department of Civil and Environmental Engineering
Brigham Young University
December 2013
Copyright © 2013 Andrew Marker
All Rights Reserved

ABSTRACT
Implementation of B-Spline Based Finite Element Analysis for the Boundary-Value Problem
Andrew J. Marker Department of Civil and Environmental Engineering
Master of Science
This project will examine the use of B-Splines as the basis shaped functions in finite element (FE) analysis. The analysis will be applied to a boundary-value problem. A program will be written to verify that B-Spline finite element (BSFE) analysis accurately represents the boundary-value problem.
Keywords: b-splines, finite element

TABLE OF CONTENTS
LIST OF TABLES ............................................................................................................ vii
LIST OF FIGURES ........................................................................................................... ix
1 Introduction .................................................................................................................. 1
2 Background ................................................................................................................... 2
Finite Element Method .......................................................................................... 2
2.1.1 Basic Concept .................................................................................................. 3
B-Splines ............................................................................................................... 3
2.2.1 Basic Concept .................................................................................................. 4
2.2.2 Basis Functions ............................................................................................... 4
3 Methods ........................................................................................................................ 7
The Boundary Value Problem ............................................................................... 7
3.1.1 The Strong Form ............................................................................................. 7
3.1.2 The Weak Form ............................................................................................... 8
3.1.3 The Galerkin Form .......................................................................................... 8
3.1.4 Matrix Form .................................................................................................... 9
3.1.5 Local Element point of view ........................................................................... 9
MATLAB Program ............................................................................................... 9
3.2.1 Gaussian Quadrature ..................................................................................... 10
3.2.2 Basis Values and Derivatives ........................................................................ 10
v
3.2.3 Mapping from Local to Global...................................................................... 11
3.2.4 Error .............................................................................................................. 12
4 Results and Conclulsions ............................................................................................ 13
Discussion of Results .......................................................................................... 13
Sources of Error .................................................................................................. 17
Conclusions ......................................................................................................... 17
REFERENCES ................................................................................................................. 18
Appendix A. Plots of Solutions ........................................................................................ 19
vi
LIST OF TABLES
Table 4-1: Error for f(x) = 1 .............................................................................................. 15
Table 4-2: Error for f(x) = x .............................................................................................. 15
Table 4-3: Error for f(x) = x2 ............................................................................................ 16
vii

viii
LIST OF FIGURES
Figure 2-1: Bézier and B-Spline Curves ............................................................................. 4
Figure 2-2: Linear B-Spline Basis over Five Elements ..................................................... 5
Figure 2-3: Quadratic B-Spline Basis over Four Elements ................................................ 5
Figure 2-4: Cubic B-Spline Basis over Six Elements ......................................................... 6
Figure 4-1: f(x) = 1, n = 5 ................................................................................................. 13
Figure 4-2: Enlarged picture of f(x) = 1, n=5 ................................................................... 14
Figure 4-3: f(x) = 1, n = 5000 ........................................................................................... 14
Figure 4-4: Error for f(x) = x2 .......................................................................................... 16
ix

x
1 INTRODUCTION
The finite element method (FEM) has been widely used for engineering purposes since its
introduction in the 1940’s and 1950’s. The age of computers accelerated the use and understanding
of FEM. FEM requires the use of basis equations to approximate the function. Often piece-wise
continuous polynomials, LaGrange or Hermite polynomials, have been used as the basis functions
in FEM. B-splines offer an alternative basis that is continuous over the whole model. In interesting
application of B-Spline based FEM is iso-geometric analysis (IGA). B-Splines are used
extensively in computer modeling which allows for B-Splines to be a link between modeling and
analysis.
This project will examine the use of B-Splines as the basis shaped functions in FEM
analysis. The analysis will be applied to the boundary-value problem. A program was developed
to run FEM on the boundary-value problem with first, second, and third-order basis functions. The
error between the actual solution and the FEM results are calculated and compared with FEM
using Lagrange polynomials of the same order. The rate of convergence was also calculated and
used to determine the efficiency of B-Spline based FEM. This paper provides a brief overview of
the finite element method and B-Splines. It discusses the method of the project. The results will
be presented and discussed.
1
2 BACKGROUND
This section provides a brief introduction to the finite element method and b-splines. It is
meant to provide enough information for the reader to understand the project, and is certainly not
exhaustive. For each topic a brief history is given as well as an introduction to the basic idea.
Finite Element Method
The finite method is used today for many engineering applications. Much research has and
continues to be devoted to this topic because of its importance in engineering analysis, although
the finite element method is relatively new. Its origins are in the 1940’s and 1950’s when
mathematicians and engineers were looking to solve high order problems with new numerical
methods. First publications on the subject include R.L. Courant’s Variational Methods for the
Solution of Problems of Equilibrium and Vibration in which he used piece-wise linear
approximations on triangles. The method is more clearly outlined by Argyris and Turner with
others in the 1950’s. The technique was first applied to the discipline of structures but found other
uses including heat conduction and fluids in the 1960’s. The development of computers has
increased the amount of research and application of the FEM. (Pepper, Heinrich, 2006, ). “Along
with the development of high-speed digital computers, the application of the finite element method
also progressed at a very impressive rate” (Rao, 2001). FEM continues to be a highly regarded and
used numerical method in engineering and other disciplines. Research continues in order find new
techniques and applications.
2
2.1.1 Basic Concept
The finite element method (FEM) is a numerical method. Like all numerical methods, the
idea is to find an approximation to a complex problem by replacing it with a simpler one. The idea
behind FEM is to break up a larger geometry into smaller sub-geometries, or elements. Analysis
of the individual elements can be completed based on the governing equations of the problem.
Approximations are made by linear combinations of the basis functions. The results are than
assembled into a global solution which approximates the real solution. The approximation
improves as the mesh is refined, that is as the number of elements increases. Different techniques
or greater computational effort can also be applied to FEM to create closer approximations.
(Huebner 2001, Reddy, 1984)).
B-Splines
Similar to the finite element method, the history of B-splines (basis splines) is relatively
new. . B-splines were first introduced for use in statistical data smoothing by Schoenberg in 1946
who coined the phrase. B-splines were developed for the automotive industry in the 1960’s as an
easy way to model the complex curves as found on automobiles. Two French mathematicians,
Bézier with Renault and De Casteljau’s with Citroën, simultaneously developed B-splines for
geometric design. There are two important mathematical developments in the history of B-splines.
First is the development of the recursive relation for defining and evaluating B-splines basis
functions. This is often credited to de Boor et al. The second is the creation of the polar form by
Ramshaw which allows for quick understanding and manipulating of B-splines. Today B-splines
3
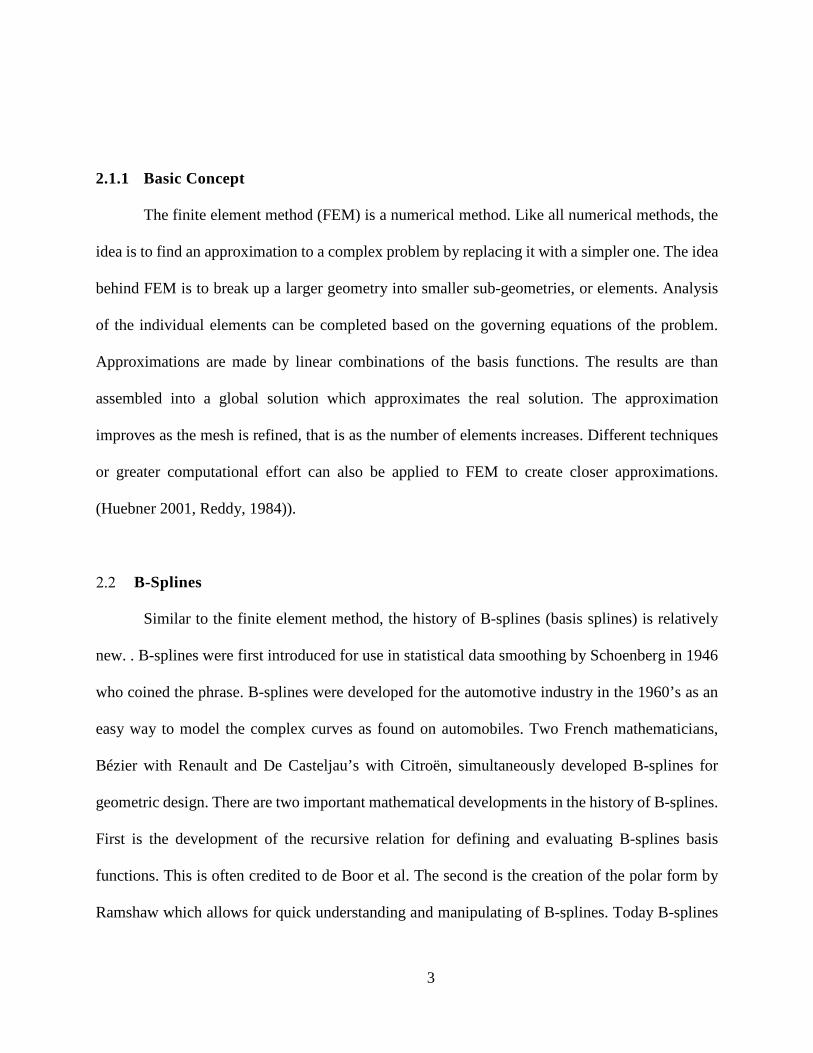
P(1, 1, 1)
P(1, 1, 2)
P(1, 2, 3)
P(2, 3, 3)
P(3, 3, 3) Knot Vector (1 1 1 2 3 3 3 )
b) B-Spline a) Bézier Curve Figure 2-1: Bézier and B-Spline Curves
are used in the fields of statistics, computer aided design (CAD), computer aided geometric design,
animation, graphic design, and finite element analysis. Even the fonts and curves on a word
processor are B-splines.
2.2.1 Basic Concept
B-splines are a sequence of Bezier curves constructed in a way to create Cn-1 continuity,
where C is the order. B-splines are defined by the control points, P, associated with weights, and
the knot vector which controls the parameterization of the spline. The polar form of B-spline
mentioned above makes it easy to find intermediate values between control points Figure 1 shows
a single Bézier curve and a B-spline consisting of three Bézier curves (Sederberg, 2012).
2.2.2 Basis Functions
An important aspect of FEM is choosing a basis function, or a linear combination by which
functions can be approximated. B-spline basis functions do this and also guarantee Cn-1 continuity
which becomes convenient for higher order problems. Using the knot vector and recursive relation
B-spline basis functions are inexpensive to evaluate as are the derivatives. AS with any linear
combination, the sum of the values at any point is one, and the sum of the derivatives at any point
4
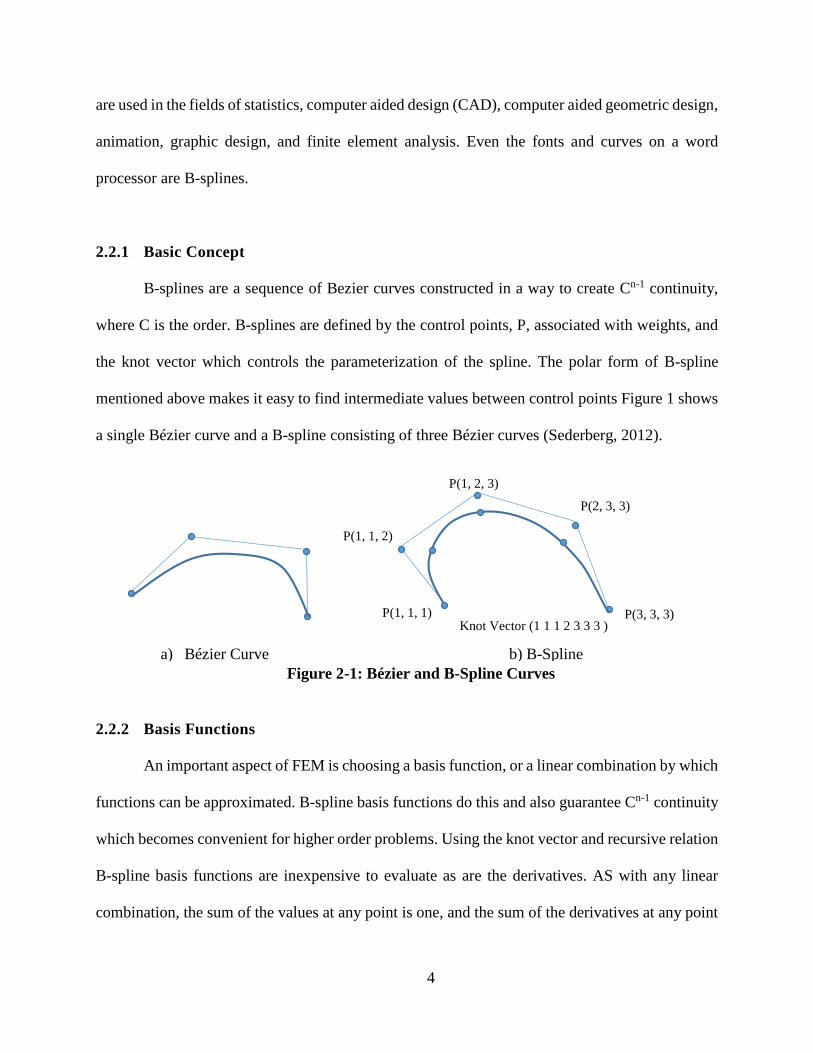
is zero. Another innovative reason for using B-spline basis functions with FEM is for the use in
iso-geometric analysis, which tries to close the gap between the graphical model and the model
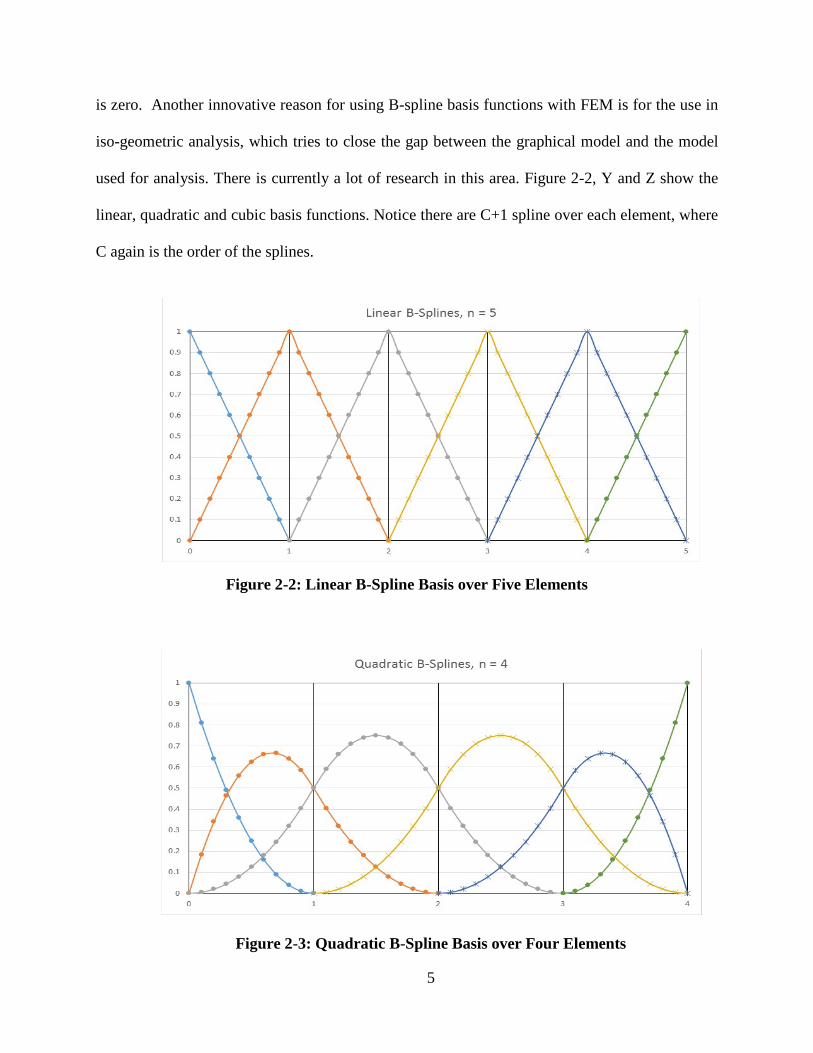
used for analysis. There is currently a lot of research in this area. Figure 2-2, Y and Z show the
linear, quadratic and cubic basis functions. Notice there are C+1 spline over each element, where
C again is the order of the splines.
Figure 2-2: Linear B-Spline Basis over Five Elements
Figure 2-3: Quadratic B-Spline Basis over Four Elements
5
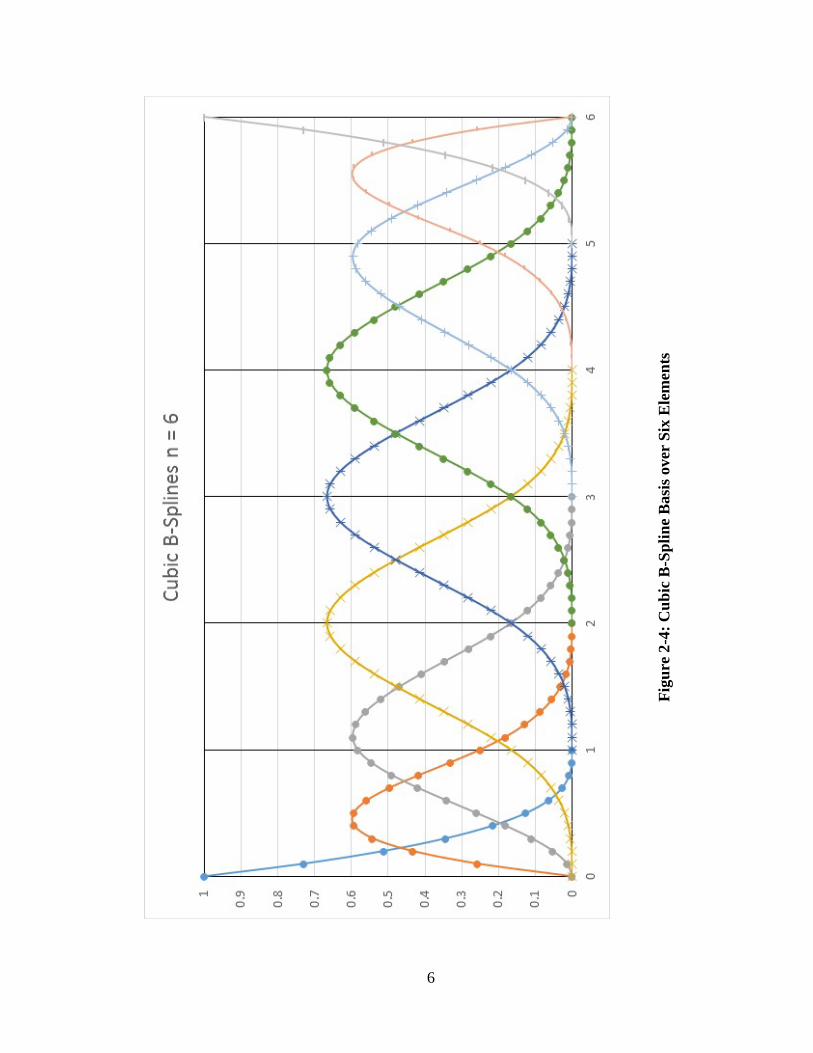
Figu
re 2
-4: C
ubic
B-S
plin
e B
asis
ove
r Si
x E
lem
ents
6

3 METHODS
The purpose of this project was to implement a B-splines basis finite element program to
solve the boundary value problem. The main portion of the project consisted of defining the
problem, and solving the problem with a program in MATLAB. Also an Excel spreadsheet was
created and programmed to generate values for the basis function for a given order and number of
elements.
The Boundary Value Problem
The boundary value problem (BVP) has been widely studied as an introduction to finite
element method. It is a simple one dimensional first-order problem. It is introduced here briefly as
in Hughes (87) and can be studied in greater detail by referring to that book. The goal of the
following derivation is to get to a matrix form of the equation which is familiar and easy to solve.
3.1.1 The Strong Form
The strong or classical form of the BVP in terms of u on Ω = [0,1] is
(𝑆𝑆)
⎩⎨
⎧Given 𝑓𝑓 ∶ Ω → ℝ and constants 𝑔𝑔 and ℎ, find 𝑢𝑢 ∶ Ω → ℝ , 𝑠𝑠𝑢𝑢𝑠𝑠ℎ 𝑡𝑡ℎ𝑎𝑎𝑡𝑡
𝑢𝑢,𝑥𝑥𝑥𝑥+ 𝑓𝑓 = 0 𝑜𝑜𝑜𝑜 Ω𝑢𝑢(1) = 𝑔𝑔
−𝑢𝑢,𝑥𝑥 (0) = ℎ
3.1
where a comma represent differentiation and f is a function defined on Ω. The second and third
equations represent the boundary conditions. Both g and h are 0 for this project.
7

3.1.2 The Weak Form
To get the weak form of the BVP equation we first define the trial solution space, δ, and
weighting function space, υ, as the following
𝛿𝛿 = 𝑢𝑢 | 𝑢𝑢 ∈ 𝐻𝐻1,𝑢𝑢(1) = 𝑔𝑔 3.2
Υ = 𝑤𝑤 | 𝑤𝑤 ∈ 𝐻𝐻1,𝑤𝑤(1) = 0 3.3
where H1 are functions who satisfy the following equation.
(𝑢𝑢,𝑥𝑥 )2𝑑𝑑𝑑𝑑 < ∞ 3.41
0
Then the weak form can be written as
(𝑊𝑊) = Given 𝑓𝑓,𝑔𝑔, and ℎ, as before. Find 𝑢𝑢 ∈ 𝛿𝛿 such that for all 𝑤𝑤 ∈ Υ
∫ 𝑤𝑤,𝑥𝑥10 𝑢𝑢,𝑥𝑥 𝑑𝑑𝑑𝑑 = ∫ 𝑤𝑤𝑓𝑓 𝑑𝑑𝑑𝑑 + 𝑤𝑤(0)ℎ1
0 3.5
Let
𝑎𝑎(𝑤𝑤, 𝑢𝑢) = 𝑤𝑤,𝑥𝑥
1
0
𝑢𝑢,𝑥𝑥 𝑑𝑑𝑑𝑑 3.6
(𝑤𝑤,𝑓𝑓) = 𝑤𝑤𝑓𝑓 𝑑𝑑𝑑𝑑1
0
3.7
Then the weak form can be written as
𝑎𝑎(𝑤𝑤, 𝑢𝑢) = (𝑤𝑤,𝑓𝑓) + 𝑤𝑤(0)ℎ 3.8
3.1.3 The Galerkin Form
Discretizing using Galerkin’s approximation we create subsets of the trial and waiting
spaces such that 𝛿𝛿ℎ ∈ 𝛿𝛿 𝑎𝑎𝑜𝑜𝑑𝑑 Υℎ ∈ Υ. Then uh is constructed such that uh = υh + gh generating the
Galerkin form:
(𝐺𝐺)Given 𝑓𝑓, 𝑔𝑔, 𝑎𝑎nd ℎ, as before, find 𝑢𝑢ℎ = 𝜐𝜐ℎ + 𝑔𝑔ℎ 𝑤𝑤ℎ𝑒𝑒𝑒𝑒𝑒𝑒 𝜐𝜐ℎ ∈ Υℎ,
such that for all 𝑤𝑤ℎ ∈ Υℎ𝑎𝑎(𝑤𝑤ℎ, 𝜐𝜐ℎ) = (𝑤𝑤ℎ,𝑓𝑓) + 𝑤𝑤ℎ(0)ℎ − 𝑎𝑎(𝑤𝑤ℎ,𝑔𝑔ℎ)
3.9
8

3.1.4 Matrix Form
The Galerkin form results in a system of linear equations which can be interpolated with
the basis functions and written in a matrix form familiar to engineers, Kd = F, where
𝑲𝑲 = [𝑲𝑲𝑨𝑨𝑨𝑨], where 𝑲𝑲𝑨𝑨𝑨𝑨 = 𝑎𝑎(𝑁𝑁𝐴𝐴,𝑁𝑁𝐵𝐵) 3.10
𝑭𝑭 = 𝑭𝑭𝑨𝑨, where 𝑭𝑭𝑨𝑨 = (𝑁𝑁𝐴𝐴,𝑓𝑓) + 𝑁𝑁𝐴𝐴(0)ℎ − 𝑎𝑎(𝑁𝑁𝐴𝐴,𝑁𝑁𝑛𝑛+1)𝑔𝑔 3.11
Note that NA represents the basis functions, or in this case the B-spline basis functions.
Recall that g and h are both zero for this project simplifying the equation for FA to FA = (NA, f).
Once F and K are assembled d can be solved for which is our solution u.
3.1.5 Local Element point of view
In FEM each element is analyzed and then element components are assembled into the
global problem. For each element the ke matrix and fe vector is calculated with the following
equations. However the local limits of integration are now -1 to 1 which requires some adjustment
when assembling K.
𝒌𝒌𝑎𝑎𝑎𝑎𝒆𝒆 = 𝑎𝑎(𝑁𝑁𝑎𝑎,𝑁𝑁𝑁𝑁) 3.12
𝒇𝒇𝑎𝑎𝒆𝒆 = (𝑓𝑓,𝑁𝑁𝑎𝑎) 3.13
MATLAB Program
Key portions of the program most pertinent to the results will be highlighted here.
Appendix A contains an outline view of the entire program as well as the code. The code was
modified from previous code which used Lagrange polynomials as the basis. The code the
Lagrange basis was kept for comparison.
9

3.2.1 Gaussian Quadrature
Gaussian quadrature was used to evaluate the integrals in the analysis and in finding the
error. Gaussian quadrature works by taking a weighted sum of values at f at key integrations points.
𝑓𝑓(𝑑𝑑) ≈ 𝑓𝑓(𝜉𝜉𝑙𝑙) ∗ 𝑊𝑊𝑙𝑙
𝑛𝑛𝑖𝑖𝑖𝑖𝑖𝑖
𝑙𝑙=1
1
−1
3.14
It is an effective way to evaluate complicated integrals. Hughes reports that “accuracy of
order 2nint is gained by nint points of integration” (Hughes, 1987). A nint of 3 was used for this
project requiring that
𝜉𝜉1 = −3/5, 𝜉𝜉2 = 0, 𝜉𝜉3 = 3/5
W1 = W3 = 5/9, W2 = 8/9.
3.2.2 Basis Values and Derivatives
A large portion of the new code was to evaluate the new basis. Because Gaussian
quadrature was used to approximate the integrals, so the basis had to be evaluated at three points
in each element. With Lagrange polynomials the functions are the same over each element, so only
three points had to be evaluated. With the B-splines, three points for each element needed to be
calculated.
Using a uniform knot interval k:[0 0 0 1…n-1 n n n] for n elements, and the recursive
relation, the equations for the basis functions, and their derivatives can easily be evaluated at any
point. For example the quadratic formulas are
10
∈−−
−
∈
−
−−+
−−−
−
∈−−
−
=
++
++++
+
++
++
++
+
+
++
+
++
elsewhere
xxxxxxx
xx
xxxxx
xxxxxx
xxxxxx
xxxxxxx
xx
xB
iiiiii
i
iiii
ii
ii
ii
ii
iiiiii
i
i
,0
),[,))((
)(
),[,))(())((1
),[,))((
)(
)(
322313
23
2113
31
2
2
12
121
2
2 3.15
Where xi represent the knots. Functions were created that returned values and derivatives for each
of the basis equations.
3.2.3 Mapping from Local to Global
The element space is different than the global space due to the way the local element is
defined on [-1 1] and the global element is defined on [a b] where b –a = 1. To handle this apply a
change of variables to the local equations which result in a derivative term in the integral. In one
dimension this is related to the first derivative. Prior to integrating, the derivative term at each
quadrature point is determined as
𝑠𝑠𝑎𝑎𝑁𝑁𝑎𝑎(𝜉𝜉)𝐶𝐶+1
𝑎𝑎=1
3.16
Where ca are the control points of the B-Splines. For convenience the control point were chosen at
the greville abscissae so the geometric space and parametric space are equivalent.
11
3.2.4 Error
Error was calculated using a least squared approach. Again quadrature was applied for the
following integral. The rate of convergence, change in error per change in the number of elements
is a good indicator of how well a FEM is working.
𝐸𝐸 = (𝑢𝑢𝑎𝑎𝑎𝑎𝑡𝑡𝑡𝑡𝑎𝑎𝑙𝑙 − 𝑢𝑢𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑥𝑥 𝑑𝑑𝑢𝑢)1
0
1/2
3.17
12
4 RESULTS AND CONCLULSIONS
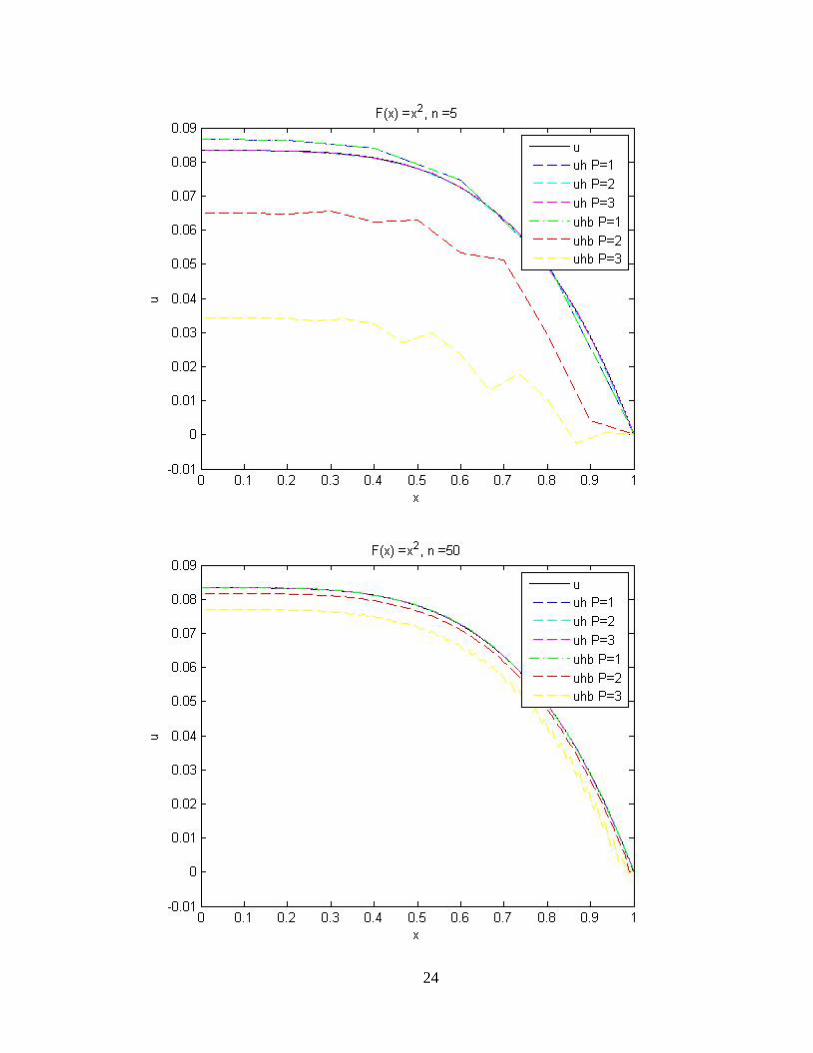
Discussion of Results
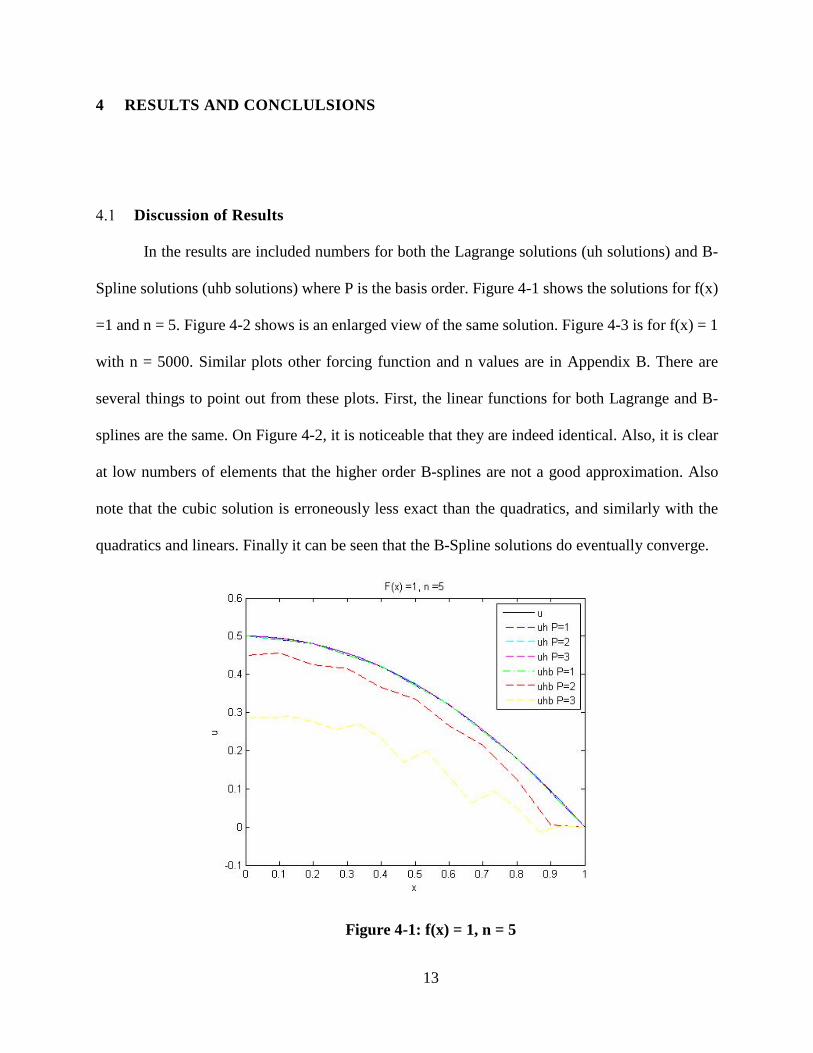
In the results are included numbers for both the Lagrange solutions (uh solutions) and B-
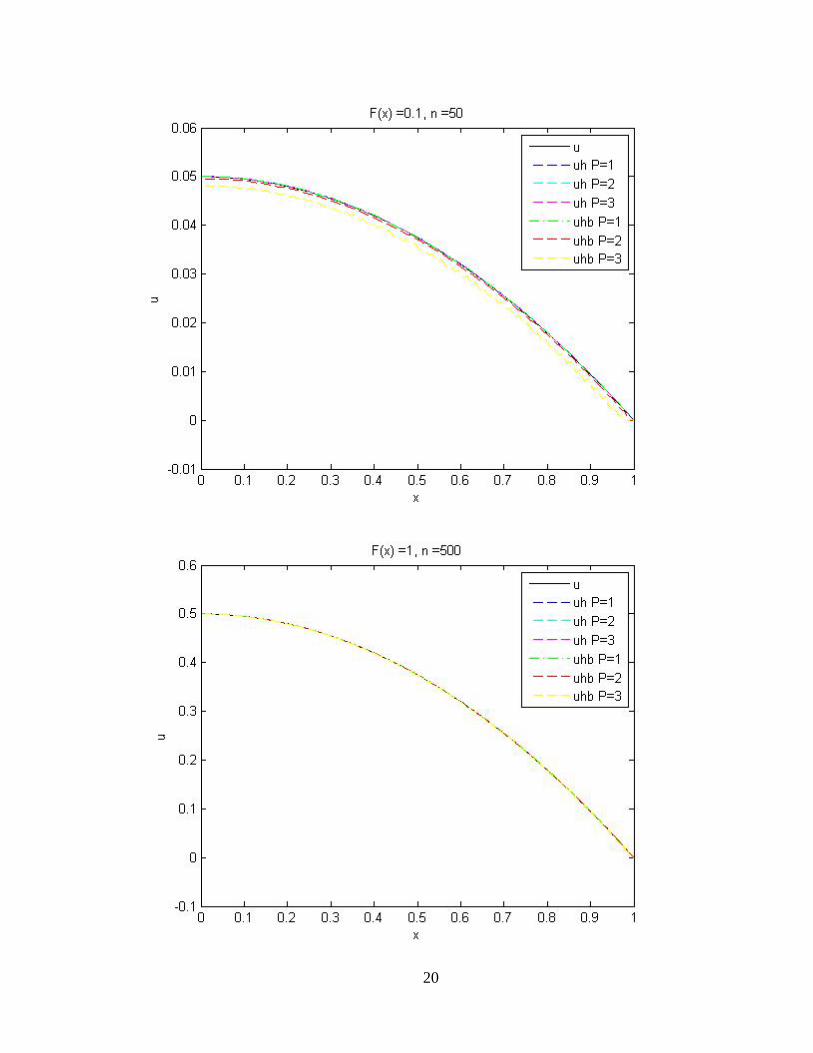
Spline solutions (uhb solutions) where P is the basis order. Figure 4-1 shows the solutions for f(x)
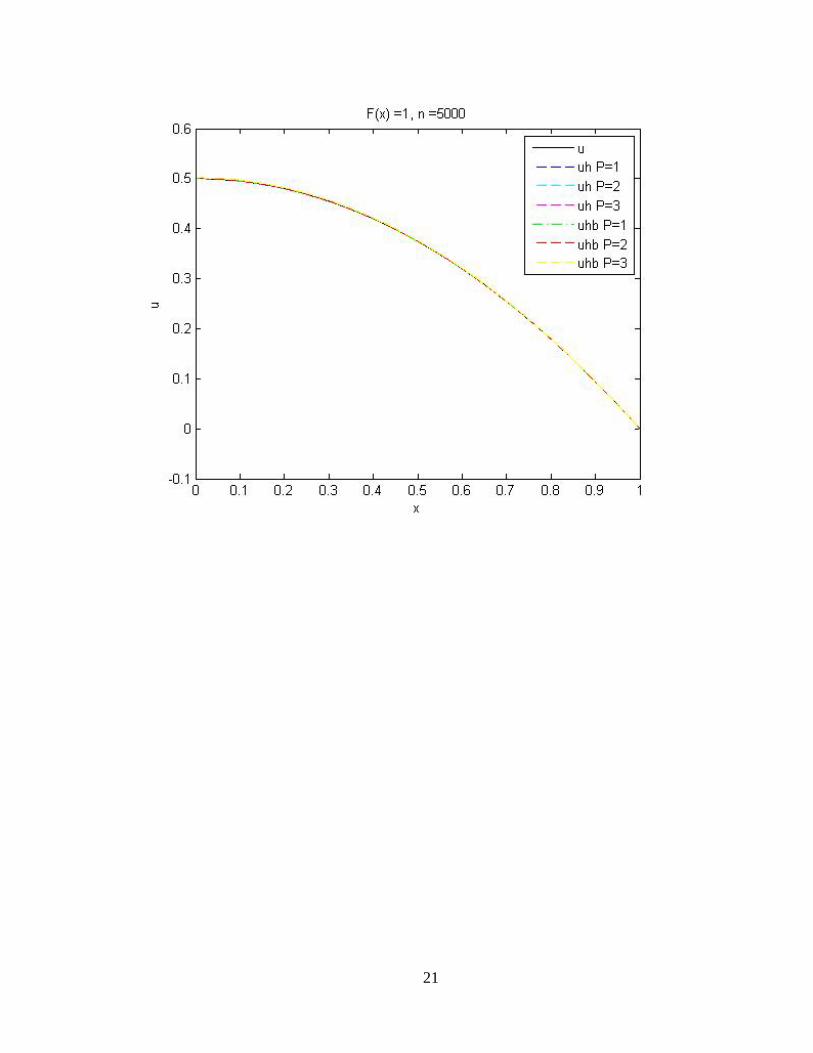
=1 and n = 5. Figure 4-2 shows is an enlarged view of the same solution. Figure 4-3 is for f(x) = 1
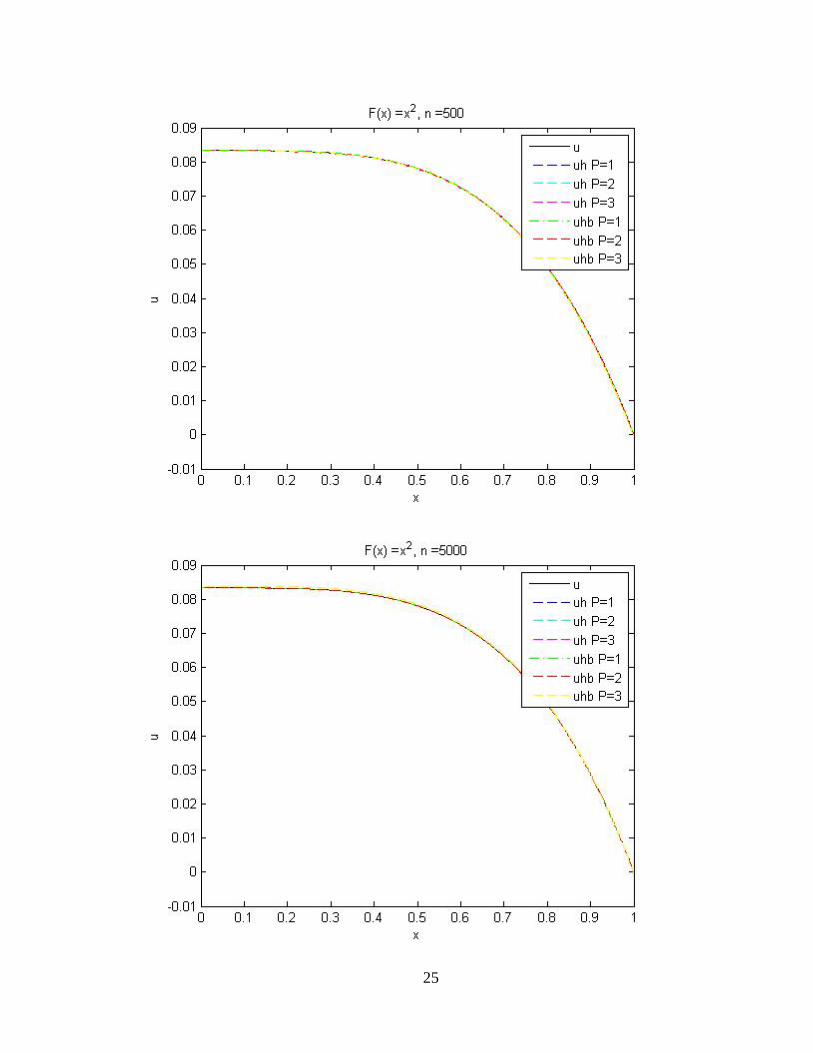
with n = 5000. Similar plots other forcing function and n values are in Appendix B. There are
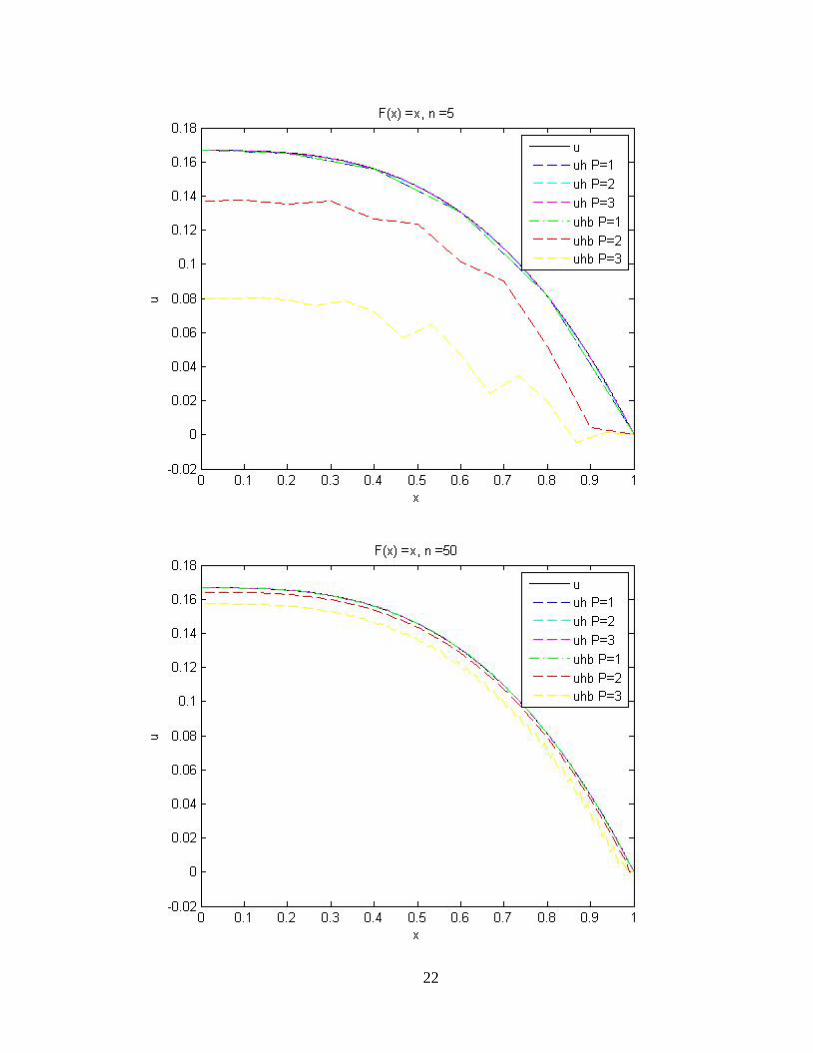
several things to point out from these plots. First, the linear functions for both Lagrange and B-
splines are the same. On Figure 4-2, it is noticeable that they are indeed identical. Also, it is clear
at low numbers of elements that the higher order B-splines are not a good approximation. Also
note that the cubic solution is erroneously less exact than the quadratics, and similarly with the
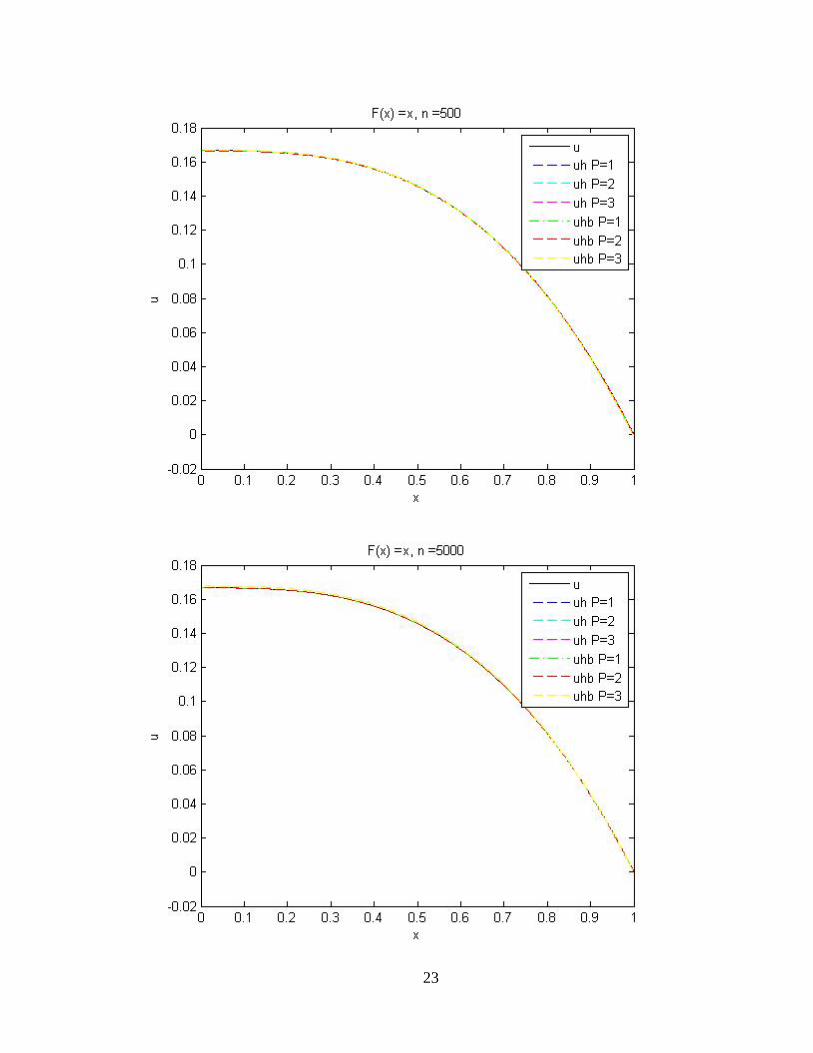
quadratics and linears. Finally it can be seen that the B-Spline solutions do eventually converge.
Figure 4-1: f(x) = 1, n = 5
13
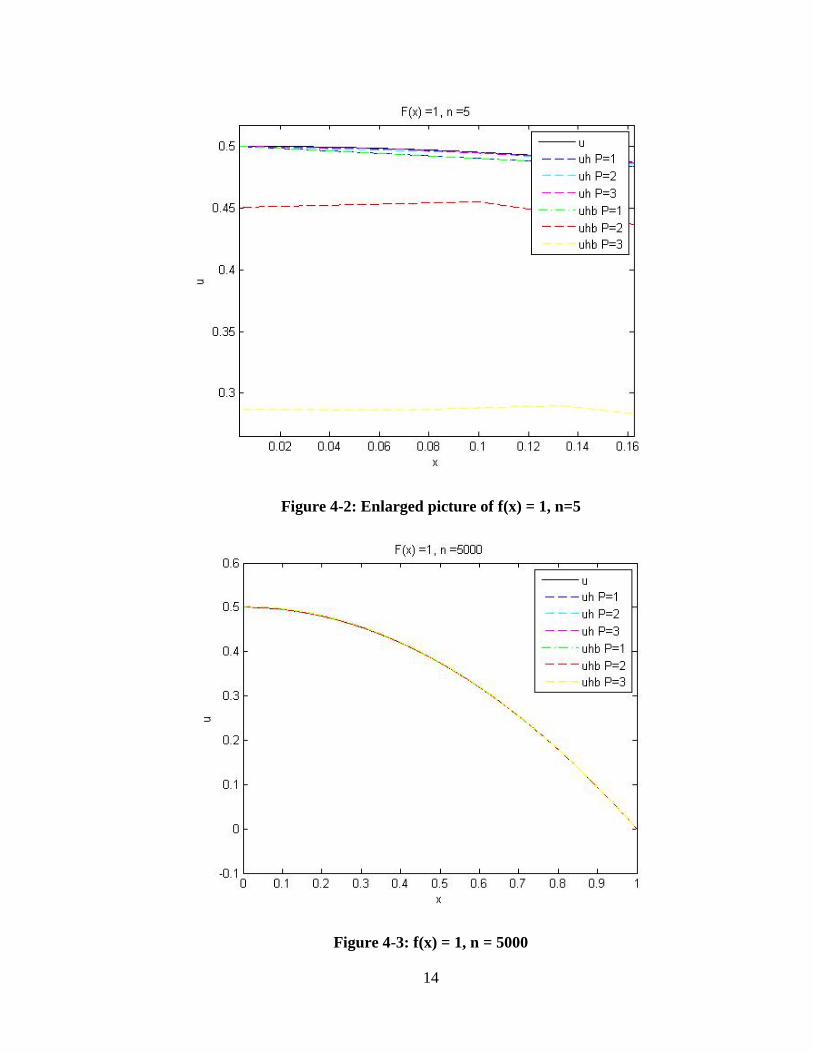
Figure 4-2: Enlarged picture of f(x) = 1, n=5
Figure 4-3: f(x) = 1, n = 5000
14
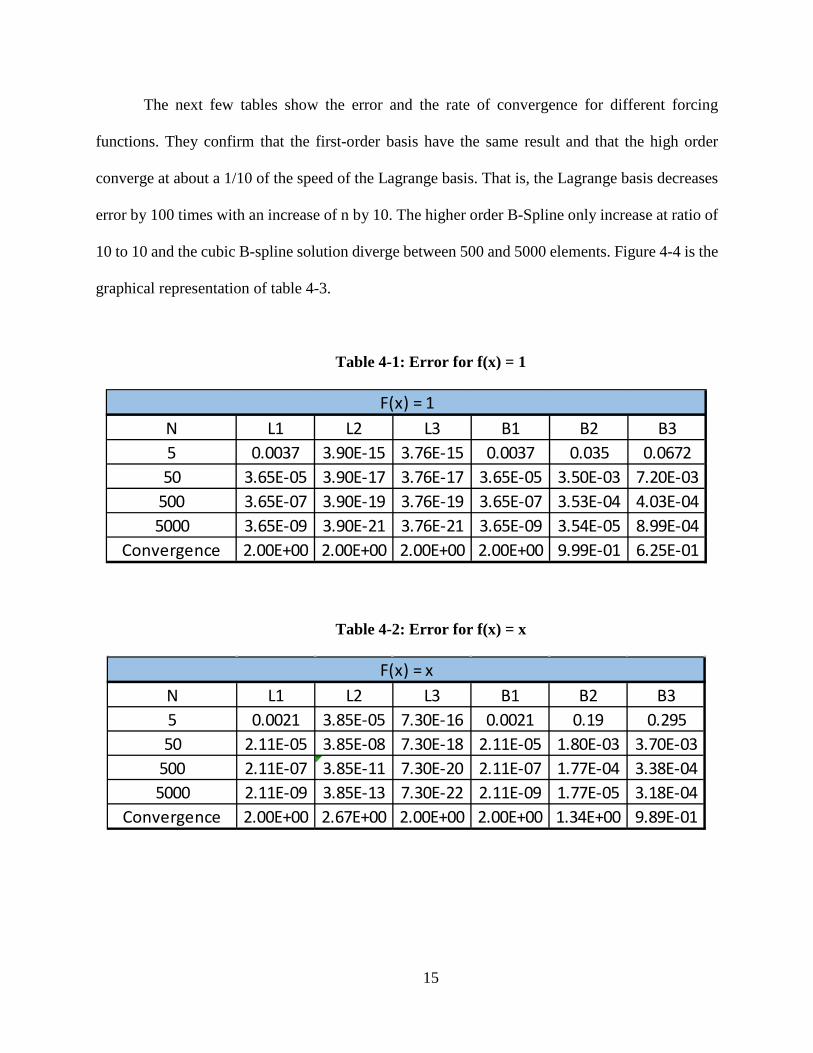
The next few tables show the error and the rate of convergence for different forcing
functions. They confirm that the first-order basis have the same result and that the high order
converge at about a 1/10 of the speed of the Lagrange basis. That is, the Lagrange basis decreases
error by 100 times with an increase of n by 10. The higher order B-Spline only increase at ratio of
10 to 10 and the cubic B-spline solution diverge between 500 and 5000 elements. Figure 4-4 is the
graphical representation of table 4-3.
Table 4-1: Error for f(x) = 1
Table 4-2: Error for f(x) = x
N L1 L2 L3 B1 B2 B35 0.0037 3.90E-15 3.76E-15 0.0037 0.035 0.067250 3.65E-05 3.90E-17 3.76E-17 3.65E-05 3.50E-03 7.20E-03
500 3.65E-07 3.90E-19 3.76E-19 3.65E-07 3.53E-04 4.03E-045000 3.65E-09 3.90E-21 3.76E-21 3.65E-09 3.54E-05 8.99E-04
Convergence 2.00E+00 2.00E+00 2.00E+00 2.00E+00 9.99E-01 6.25E-01
F(x) = 1
N L1 L2 L3 B1 B2 B35 0.0021 3.85E-05 7.30E-16 0.0021 0.19 0.29550 2.11E-05 3.85E-08 7.30E-18 2.11E-05 1.80E-03 3.70E-03
500 2.11E-07 3.85E-11 7.30E-20 2.11E-07 1.77E-04 3.38E-045000 2.11E-09 3.85E-13 7.30E-22 2.11E-09 1.77E-05 3.18E-04
Convergence 2.00E+00 2.67E+00 2.00E+00 2.00E+00 1.34E+00 9.89E-01
F(x) = x
15
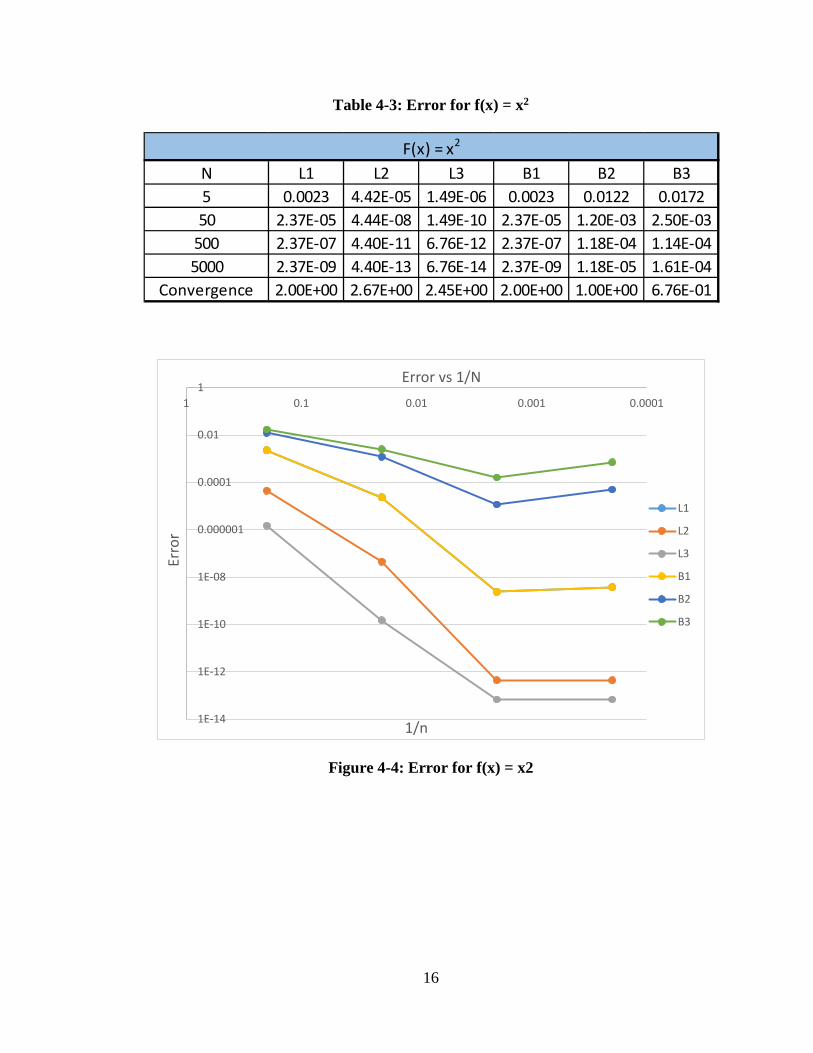
Table 4-3: Error for f(x) = x2
Figure 4-4: Error for f(x) = x2
N L1 L2 L3 B1 B2 B35 0.0023 4.42E-05 1.49E-06 0.0023 0.0122 0.017250 2.37E-05 4.44E-08 1.49E-10 2.37E-05 1.20E-03 2.50E-03
500 2.37E-07 4.40E-11 6.76E-12 2.37E-07 1.18E-04 1.14E-045000 2.37E-09 4.40E-13 6.76E-14 2.37E-09 1.18E-05 1.61E-04
Convergence 2.00E+00 2.67E+00 2.45E+00 2.00E+00 1.00E+00 6.76E-01
F(x) = x2
1E-14
1E-12
1E-10
1E-08
0.000001
0.0001
0.01
10.00010.0010.010.11
Erro
r
1/n
Error vs 1/N
L1
L2
L3
B1
B2
B3
16
Sources of Error
While there are small errors that come from the approximations of the FEM, it is clear that
the results acquired here has more error than it should. It was briefly mentioned that there is a
difference between the local and global spaces. It is most likely that this large error is due to the
fact that the code does not properly account for mapping between the two spaces. The derivative
factor used to get the local into global get being incorrect or this mapping could be otherwise
missed in a different area.
Conclusions
The program written to implement a B-spline basis FEM was successful in the fact that it
created solutions that converged to the answer with mesh refinement (as the number of elements
increased). It was not successful as there is a large source of error, probably due to an issue
mapping between the two spaces, and because it converges too slowly. The program did not
successfully implement the B-spline basis. In order to make the program a success, the source of
error would need to be identified. Once the program worked for the boundary value problem, it
could than similarly be applied to higher order problems.
17

REFERENCES
Huebner, Kenneth H. 2001. The Finite Element Method for Engineers. 4th ed. New York: Wiley. Hughes, Thomas J.R. 1987. The Finite Element Method: Linear Static and Dynamic Finite
Element Analysis. Mineola, NY: Dover Publications. Pepper, Darrell W., and Juan C. Heinrich. 2006. The Finite Element Method: Basic Concepts and
Applications. 2nd ed. New York: Taylor & Francis. Rao, Singiresu S., 2011. The Finite Element Method in Engineering. 5th ed. Burlington, MA:
Butterworth-Heinemann. Reddy, J. N. 1984. An Introduction to the Finite Element Method. New York: McGraw-Hill. Sederberg, Thomas W. 2012. Computer Aided Geometric Design.
18
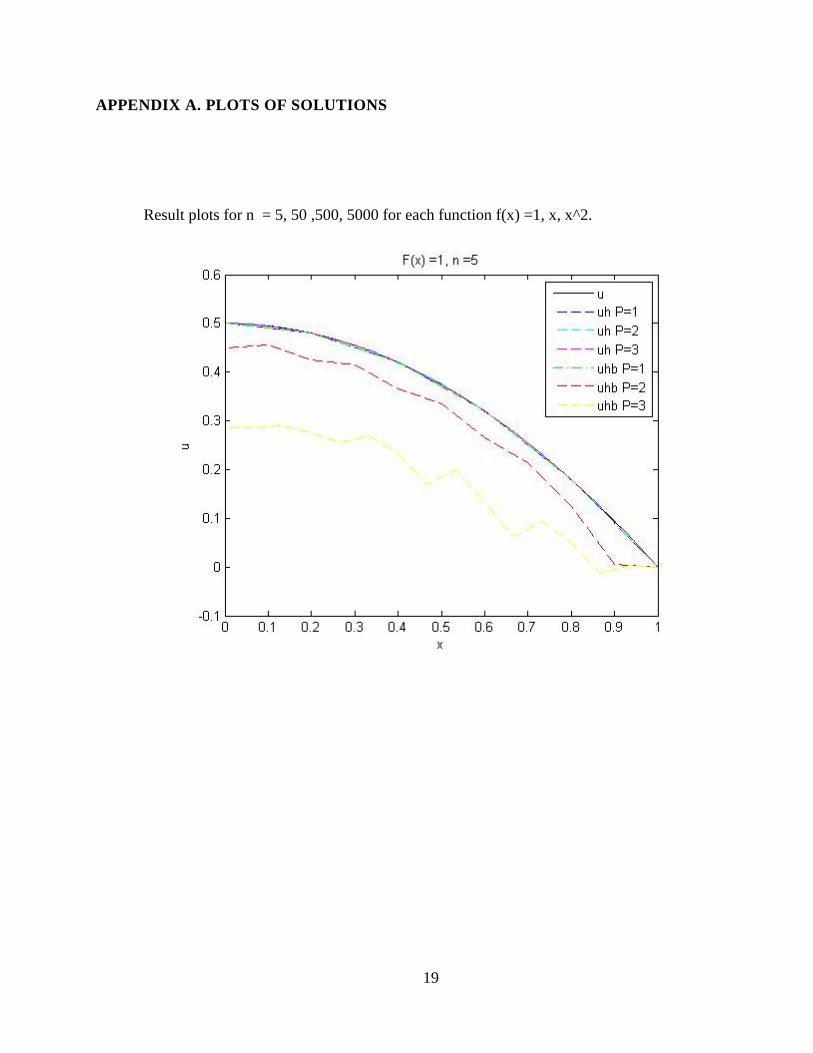
APPENDIX A. PLOTS OF SOLUTIONS
Result plots for n = 5, 50 ,500, 5000 for each function f(x) =1, x, x^2.
19
20
21
22
23
24
25





























