Embed Size (px)
Citation preview

1
PRESS KIT I PARIS I JULY 9, 2018
Field trip to the Laboratory for Analysis and Architecture of Systems (LAAS) of the CNRS July 9, 2018
© Frédéric MALIGNE/LAAS/CNRS Photo library, and Cyril FRESILLON/LAAS/CNRS Photo library
Contact
CNRS Press Officer l Alexiane Agullo l T +33 1 44 96 43 90 l [email protected]
Imagining tomorrow

2
TABLE OF CONTENTS
Visit schedule ................………………………………………………………………………………………….p.3 General presentation of LAAS-CNRS………..………………………………………………………………...p.4 Project files Micro and nanotechnologies for health
MultiFAB..………………………………………………………………………………………………….p.6
SmartCatch® .…………………………………………………………………………………………….p.8
BIAbooster ………...….…………………………………………………………………………………..p.9
Robotics at LAAS-CNRS
Aerial robotics……...........…………………………………………………………………………….. p.11
Humanoid robotics….…........………………………………………………………………………….p.13
Photographic resources ……………………………………………………………………...........................p.14

3
VISIT SCHEDULE
Leave Hôtel du département, 1 boulevard de la Marquette in Toulouse, at 9:00 - arrival at laboratory at 9:30 Micro and nanotechnologies for health 9:35 – 10:00 (group A) / 10:35 – 11:00 (group B): MultiFAB - Laurent Malaquin, Rémi Courson, Julie Foncy 9:35 – 10:00 (group B) / 10:05 – 10:30 (group A): SmartCatch - Aline Cerf 10:05 – 10:30 (group B) / 10:35 – 11:00 (group A): BIAbooster - Aurélien Bancaud Robotics at LAAS-CNRS 11:05 – 11:35 (whole group): Aerial robotics - Antonio Franchi, Marc Tognon, Davide Bicego 11:40 – 12:10 (whole group): Humanoid robotics - Olivier Stasse, Guilhem Saurel, Kevin Giraud-Esclasse 12:15 – 12:25 (whole group): Speech by Antoine Petit, chairman and CEO of the CNRS Return: leave the laboratory at 12:30 – arrive at 1 pm at the Centre Pierre Baudis, 11 esplanade Compans Caffarelli in Toulouse

4
GENERAL PRESENTATION OF LAAS-CNRS
The Laboratory for Analysis and Architecture of Systems/Le Laboratoire d'analyse et d'architecture des systèmes (LAAS-CNRS) is a CNRS research unit under the management of the Institute for Engineering and Systems Sciences (INSIS) and the Institute for Information Sciences and Technologies (INS2I) of the CNRS. Located in Toulouse, it is associated by agreement with the five founding members of l'Université fédérale Toulouse Midi-Pyrénées: l'Université Toulouse III - Paul Sabatier (UPS), l'Institut national des sciences appliquées de Toulouse (INSA), l'Institut national polytechnique de Toulouse (INPT), l'Université Toulouse - Jean Jaurès (UT2J), and l'Université Toulouse I Capitole (UT1).
Research Numerous industrial and societal issues, for instance in the domains of aeronautics, space, health, energy, and communication networks, raise fundamental questions that drive the laboratory’s research projects. The majority of these projects are connected by the laboratory’s strategic axes, which establish the objectives for the research being conducted: - The Alive strategic axis aims to structure and promote a highly interdisciplinary approach within the laboratory, and consists of coupling the different internal engineering sciences with the life sciences and environmental science. - As equipment, software, networks, and robotics continue to greatly evolve, the Ambient intelligence strategic axis seeks to develop these domains in addition to anticipating future synergies, preparing the tools needed to conceive them, and proposing the first experiments pertaining to them. - The objective of the Synergy strategic axis is to make the most of the laboratory’s multidisciplinary skills, in an effort to become a major actor in the energy transition and to meet the challenges associated with it, from components to complex systems and intelligent electrical networks. - The goal of the Space axis is to bring together the multidisciplinary activities of LAAS-CNRS in the domain of space systems, to promote the emergence of ambitious projects, and to help situate them within the regional and international space community.
Partnerships
The research conducted at LAAS-CNRS has been the object of technology transfer in numerous domains: aeronautics, space, embedded systems, communications, transportation, networks, chemistry, health, environment, energy, defense, and services. The laboratory has established strong links with industry, and is engaged in many collaborative projects with regional, national, and international companies of all sizes. Partnership research has often taken the original form of joint research laboratories with industry, for instance with Actia, Airbus, Astrium, Essilor, Innopsys, Lacroix, Orange, and Thalès.

5
High-performance technological means for research
LAAS-CNRS has always been careful to provide itself with cutting-edge technological means for research. In 1976, it became the first French academic laboratory to invest in a white room for the production of microsystems, and it has also provided itself with a new experimental instrumented building that is energy independent and entirely dedicated to a number of subjects, such as cyberphysical systems and energy. > The micro and nanotechnologies facility The Renatech facility is a white room with 35 million euros worth of equipment for developing, shaping, and processing materials for prototyping microelectronic, optoelectronic, and micro-optomechanical components, as well as micro and nanosystems. These research means are available for use by LAAS-CNRS researchers, as well as for external academic and industrial requests. This structure has been continually evolving for nearly 40 years. > The Georges Giralt building By virtue of its size and sophisticated instrumentation, this building foreshadows what our living spaces could be in coming years, and in particular offers a context that is similar to the real conditions of the laboratory’s research. It concerns rapidly evolving fields such as embedded systems, sensor networks, the Internet of things, machine to machine communication, the interconnection of services, companion robots, respect for privacy, and optimized management of energy. The platform will gradually expand with new robots, sensors, and networks, as well as new equipment connected to energy. > The biology/biochemistry platform It combines over 400 m² the experimental means for studying the characterization of micro and nanosystems dedicated to biology, health, and the environment. These means are essential for research on biosensors, nanobiosystems, lab-on-a-chip, and bioinspired nanotechnologies.
LAAS-CNRS platforms in the service of research
> Renatech micro/nanotechnologies facility measuring over 1,500 m2
> Conception of micro & nanosystems > Characterization rooms: over 1,000 m2, including 400 m2 devoted to biological and chemical analysis > Fleet of a dozen robots > Georges Giralt instrumented building - cyberphysical systems - photovoltaic energy

6
MULTIFAB Additive 3D printing technologies represent a new challenge for rapid prototyping and the production of microsystems in fields of application such as electronics, optics, biomedical analysis, and fundamental biology. MultiFAB is an open platform project led by Laurent Malaquin at LAAS-CNRS and Philippe Tailhade at Cirimat (CNRS/Université Toulouse III – Paul Sabatier/INP Toulouse) in Toulouse. This project, which is financed by funds from the ERDF and Région Occitanie, aims to promote the development, transfer, and dissemination of additive fabrication technologies with academic and industrial partners. This entails validating cutting-edge 3D and bioprinting technologies that can meet the major challenges of high resolution (<10µm) and multimaterial printing. This project also includes the development of new functional materials and biomaterials. The technologies developed within the MultiFAB platform include stereolithography,1 inkjet printing, laser sintering,2 as well as the laboratory’s patented technologies for printing living tissue. This equipment can produce microsystems in a wide range of resolutions from the millimeter scale to micrometer dimensions, in a large variety of materials (metals, polymers, composites, hydrogels, etc.). The MultiFAB project includes eight industrial partners whose sectors of interest include aeronautics, space, microelectronics, optics, and microfluidics. The applications being developed involve microfluidics, the integration of optical sensors, radiofrequency for biomedical and environmental analysis, and the creation of in vitro models of culture for pharmacology.
1 Stereolithography is what is known as a rapid prototyping technique, which can produce solid objects by superimposing thin layers of matter based on a digital model. 2 Sintering is a production process that consists of heating a powder without causing fusion. The grains bond with one another under the effect of the heat.
© Frédéric MALIGNE / LAAS / CNRS Photo library

7
Contacts: Laurent Malaquin is the holder of a doctorate in nanophysics as well as a CNRS researcher. After
completing a doctorate at l’Université de Toulouse and a postdoctoral fellowship in IBM’s research laboratory in Zurich, from 2007 to 2014 he devoted his research activity at l’Institut Curie to the development of labs-on-a-chip and microfluidic concepts applied to the field of biochemical analysis and biomedical diagnosis, notably in oncology. In 2015, he joined the ELiA (Engineering in Life Sciences) team at LAAS-CNRS to begin new activities in the field of 3D printing and bioprinting, in an effort to produced models of tissues and cellular microenvironments. Applications being considered involve fundamental biology, oncology, and regenerative medicine.
Laurent Malaquin is the leader of the MultiFAB project. [email protected] Julie Foncy is a research engineer at LAAS-CNRS. A biologist by training, she completed a doctorate,
which was jointly supervised by a startup (Dendris), on an interdisciplinary project combining biology, physics, chemistry, and technology. She joined LAAS-CNRS a little over 3 years ago, and is now a research engineer and “bioprinting” project leader within the MultiFAB platform. Her role is to assist scientists from different backgrounds in order to successfully complete ambitious projects on bioprinting.
[email protected] Rémi Courson completed his doctorate in materials science in 2011 (partnership with the company Essilor
Internationale and l’Université de Montpellier 2). From 2007 to 2012, he worked at the Laboratoire Charles Coulomb (CNRS/Université de Montpellier) on the synthesis of hybrid materials (sol-gel process) for microelectronics, ophthalmic optics, and building insulation. From 2012 to 2015, he rejoined LAAS-CNRS to work on the development of 2D and 3D microfluidic devices. From 2015 to 2017, he worked for the company Kloé SA on the development of processes for high-resolution 3D printing equipment. Since 2017, he has served as research engineer at LAAS-CNRS, and is the project leader for “high-resolution 3D printing” in the MultiFAB platform.
T +33 5 61 33 79 41 l [email protected]

8
SMARTCATCH ® During carcinogenesis, a number of very weak circulating tumor cells (CTCs) leave the primitive tumor and migrate into the bloodstream, and are therefore interesting biomarkers for diagnoses and prognoses. However, their very low concentration in the complex environment of blood makes their capture, counting, and analysis especially difficult. This interdisciplinary project brings together researchers from LAAS-CNRS and hospital practitioners from l'Institut universitaire du cancer in Toulouse to move beyond the limitations of current in vitro detection devices, by embedding the detection device in direct contact with the bloodstream for the first time. With this in mind, the team developed a furtive intravascular device in the form of a 3D micro-net that can be attached to a medical perfusion catheter. This device was designed to use the physical particularities of CTCs (size, deformability) in order to act as a net that can selectively capture these cells in the blood. At this stage the prototype has been tested on animal models, and is currently the subject of a first campaign of clinical tests. This technology, which has been transferred to industry, will provide oncologists with the ability to work from actual liquid biopsies, which are available at all stages of the disease’s evolution through a simple and non-traumatic medical gesture, in an effort to monitor and personalize the therapeutic project. Learn more: http://www.cnrs.fr/cnrsinnovation-lalettre/actus.php?numero=445 Contact: Aline Cerf is a physicist by training. She completed her doctorate in nanophysics in 2010 at the l’Institut
national des sciences appliquées in Toulouse, and then completed a two-year postdoctoral fellowship at Cornell University in the United States. She joined the CNRS in 2012 as a researcher. Her research activities at LAAS-CNRS focus on developing new techniques and tools based on microtechnologies for application in the life sciences and health. In September 2016 she teamed with a group of urological surgeons to create the start-up SmartCatch®, which specialized in the development of a medical device to capture tumor cells directly in the blood flow.
T + 33 5 61 33 78 66 / + 33 6 52 77 08 67 l [email protected]

9
BIABOOSTER Developed and patented3 in 2012 and 2014 at LAAS-CNRS, and implemented industrially by Picometrics-Technologies, BIABooster technology can characterize DNA with new precision and sensitivity. When used to analyze residual DNA circulating in the blood, it has identified promising signatures for monitoring patients with cancer.4 In the human body, occasional cell death translates into degradation and release of their DNA, which then circulates in the blood before being eliminated. Prior studies have shown that cancer patients had high levels of DNA fragments in their blood. However, factors such as a rich diet or physical effort may also be responsible for this high level of DNA fragments. BIABooster achieves sensitive and fast analysis of DNA molecules, opening new avenues for better characterizing the composition of this residual DNA fraction in the blood, and hence the specification of its origin. To analyze DNA, the BIABooster device operates in two in-line concentration and separation steps.5 First, the DNA is concentrated through a system of capillaries formed from the junction of a small capillary with another that has a larger cross-section. The researchers allow a solution containing the DNA to flow into the large capillary, and then use an electric field with low amplitude to slow migration. The change in flow rate and electric field in the constriction stop the DNA, and concentrate it like a “wafer.” This wafer is then released through the progressive drop in the electric field, which also separates the fragments according to size. The researchers have been using BIABooster since 2016, and have defined a protocol presented in Analytical Chemistry. In about twenty minutes, the tool detects DNA up to a concentration of 10 fg/µL.6 It determines the concentration and size of a sample with, respectively, precisions of 20% and 3%. It has been shown to be particularly suited to tackling the profile of DNA in the bloodstream of healthy volunteers or patients with cancer, both in terms of concentration and size profile. Beyond the technical achievement, the researchers decided to use this device to analyze about one hundred clinical samples of patients with cancer from the Hôpital Européen Georges-Pompidou AP-HP and AP-HM hospitals. Their initial results confirm that the presence of low molecular weight DNA in high quantities may
3 Patents PCT/EP2015/067826 and WO/2014/020271. 4 These signatures, presented in the March 20, 2018 issue of Analytical Chemistry, could be confirmed by a larger study led by teams at the Université Paris Descartes, INSERM, AP-HM and AP-HP (Hôpital Européen Georges-Pompidou). 5 In usual molecular biology methods, the samples are processed in several steps, often using several machines. This is the case for DNA concentration, which is generally achieved via ethanol precipitation followed by analysis on electrophoresis gel. Here the technology developed works in-line, i.e. with only a single instrument and without the intervention of an operator. 6 i.e. 10 femtogram (unit of measure for mass in the International System of 10−15 gram) per microliter (10−6 liter). This is 1 million times more sensitive than the typical concentration for an analysis on agarose gel.
© Frédéric MALIGNE / LAAS / CNRS Photothèque

10
be relevant clinical information for patient monitoring. This has to be confirmed by a larger study led by teams at the Université Paris Descartes, INSERM, AP-HM, and AP-HP (Hôpital Européen Georges-Pompidou). Contact: Aurélien Bancaud completed his doctorate in 2004 at l’Unité de physico-chimie Curie (CNRS/Sorbonne
Université/Institut Curie), as well as a postdoctoral fellowship at Heidelberg University (Germany) from 2005 to 2006. He has been a CNRS researcher at LAAS-CNRS since 2006. His research is situated at the intersection of physics, technology, and biology. He is seeking to develop new approaches based on microsystems and optics for the study of chromatin (the structure of DNA inside the nuclei of eukaryotic cells) and for replication within a chromatin context.
T +33 5 61 33 62 46 / + 33 6 03 55 39 38 l [email protected]

11
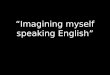
AERIAL ROBOTICS The RIS team at LAAS-CNRS conducts research in the domain of aerial robotics, with a special focus on the design, building, and control of aerial vehicles with physical interaction capabilities, which are typically called aerial (or “flying”) robots. Such robots will be used in the future in dangerous and complex tasks for civil applications. Operations being considered are those that require physical interaction with an environment that is inaccessible from the ground, and include several tasks such as inserting, pushing, sliding, and manipulating objects. Such tasks require aerial robots to use several tools including sensorial mechanisms, grippers, and articulated robotic arms. Thanks to these capabilities, aerial robots will relieve humans from difficult or dangerous operations, such as the inspection and maintenance of industrial sites, or the decommissioning of structures after natural disasters. The main challenges to be faced in these scenarios are air turbulence,
the intrinsic instability of flying platforms, and limited capabilities in terms of power, energy, structural rigidity, and sensing. Within the RIS team, researchers design and build aerial robot prototypes from scratch, developing and integrating different methodologies: - hardware design, which ensures the employment of the best hardware with respect to the particular aerial physical interaction task; - modeling, which enables the description of the physical system (mechanics and aerodynamics) using mathematical equations; - planning, which finds feasible trajectories for the robots, while avoiding unwanted collisions and respecting the constraints of the task; - control, which ensures the stability and proper behavior of robots when in contact with the environment, and - perception, which estimates the so-called “state” of both the robots (i.e., robot position, orientation, velocity, etc.) and the surrounding environment (i.e., obstacle shape, position, velocity, etc.).
Some of the aerial robots developed in the RIS team are shown in the figure. Such robots can execute operations that aerial vehicles were previously unable
to carry out, namely landing on sloped surfaces, exerting multidirectional forces, inspecting pipes by sliding, and manipulating long objects.
© LAAS-CNRS
© LAAS-CNRS

12
Contacts: Antonio Franchi has been a CNRS Tenured Researcher at LAAS-CNRS in the RIS team since 2014. From
2010 to 2013 he was a Scientist at the Max Planck Institute for Biological Cybernetics in Germany, and scientific leader of the group “Autonomous Robotics and Human-Machine Systems.” He completed his Ph.D. in Control and System Theory at Sapienza University in Rome, Italy. In 2009 he was a visiting scholar at the University of California at Santa Barbara. His main areas of expertise are aerial robotics and multi-robot systems. He has published more than 110 papers in international journals and conferences, and in 2010 was awarded with the “IEEE RAS ICYA Best Paper Award” for one of his works on Multi-robot Exploration. He is an IEEE Senior Member, and associate editor of the IEEE
Transactions on Robotics. He was AE of the IEEE RAM and the IEEE AESM. He is the coordinator of the MuRoPhen ANR JCJC project and the LAAS-CNRS PI of the EU H2020 AEROARMS project. He is co-chair of the IEEE RAS Technical Committee on Multi-Robot systems, which he co-founded in 2014, and for which he received the 2018 “IEEE RAS Most Active Technical Committee Award.” [email protected] Marco Tognon is a Ph.D. student at LAAS-CNRS in the RIS team, under the supervision of Antonio Franchi
and Juan Cortés. He received an M.Sc. degree in automation engineering from the University of Padua in Padua, Italy, in 2014, and completed a master’s thesis on aerial robotics at the Max Planck Institute for Biological Cybernetics in Tübingen, Germany. His main research focus is aerial robots for physical interaction.
[email protected] Davide Bicego is a Ph.D. student at LAAS-CNRS in the RIS team, under the supervision of Antonio Franchi.
He received an M.Sc. degree in automation engineering from the University of Padua in Padua, Italy, in 2016, and completed a master’s thesis on aerial robotics at LAAS-CNRS. His main research focus is the design and control of fully-actuated aerial robots for aerial manipulation.

13
HUMANOID ROBOTICS The research activity of the of the Gepetto team at LAAS-CNRS is centered on analysis and motion generation for anthropomorphic systems. Created in 2006, it rapidly became a leading worldwide team in humanoid robotics, unanimously recognized for its expertise in motion generation. The difficulty of controlling anthropomorphic systems resides in the complexity of their tree structure, which makes them redundant with regard to most position tasks, along with the natural instability of their biped posture and the sub-actuation of their movement through space. LAAS-CNRS researchers are studying this problem through an interdisciplinary approach focusing on three research subjects: humanoid robots, digital models, and humans. In 2017, the laboratory welcomed a new recruit named PYRENE,7 a humanoid robot designed to better interact with its environment and to complete tasks requiring a certain amount of physical strength. Its impressive capacities for calculation, action, and perception should enable it to complete a whole series of tasks that could not be carried out by the preceding generation of humanoid robots. Produced by the Spanish company PAL Robotics for LAAS-CNRS, this new robot is equipped with powerful electronics and force sensors located in its joints. For the last ten years, the algorithms developed by the Gepetto team at LAAS-CNRS have demonstrated the locomotive capacities of humanoid robots. The challenge today is to generate more dynamic and powerful movements in order to better interact with the environment. As technologies evolved, it became vital to work on a new platform that can open a new chapter in humanoid robotics, as was the case with the HRP-2 robot in its time. The PYRENE platform aims to eventually complete complex tasks such as locomotion on both flat and uneven ground, along with fully secure interaction with human beings. Tasks requiring physical strength, such as carrying heavy loads with their arms, should be possible, something that existing platforms are currently unable to do. Learn more: https://news.cnrs.fr/articles/pyrene-a-new-humanoid-robot
7 The name PYRENE was inspired by mythology, and refers to the mountain chain separating France and Spain. It received financing from a number of sources, such as the “FP7 Koroibot” European project, the “Actanthrope” ERC Advanced Grant, and the “Entracte” ANR project.
© Cyril FRÉSILLON / LAAS / CNRS Photo library

14
Contacts: Olivier Stasse has been a CNRS researcher at LAAS-CNRS in the Gepetto team since 2011. He completed
a doctorate in intelligent systems at l’UPMC in 2000 that was supervised by P. Coiffet, and an HDR (habilitation à diriger des recherches, authorization to supervise research) in robotics in 2013 at l’Université de Toulouse III – Paul Sabatier. From 2000 to 2003, he served as Assistant Professor at l’université Paris 13. From 2003 to 2011, he was one of the founding members of the Joint French-Japanese Robotics Laboratory (JRL) between the CNRS and AIST in Tsukuba, Japan.
T +33 5 61 33 64 54 l [email protected] Kevin Giraud-Esclasse is a doctoral student in the Gepetto team at LAAS-CNRS. His thesis explores
reactive vision-based generalized locomotion. He initially worked for two years within the Gepetto team as a research engineer, after completing his degrees in mechatronic engineering and computer vision in 2014.
T + 33 5 61 33 79 89 l [email protected] Guilhem Saurel is a research engineer in the Gepetto team at LAAS-CNRS, where he had earlier served
as a doctoral fellow on motion generation in mobile and humanoid robotics, which he completed in 2017 under the supervision of Jean-Paul Laumond. This thesis followed an engineering degree from l’INP-ENSEEIHT in electronics completed in 2014, during which he began his research on motion generation for art with Céleste Boursier-Mougenot.

15
PHOTOGRAPHIC RESOURCES To download the pictures, please visit: http://k6.re/r-UqH MULTIFAB
© Frédéric MALIGNE / LAAS / CNRS Photo library

16
SMARTCATCH ®
© Frédéric MALIGNE / LAAS / CNRS Photo library

17
BIABOOSTER
© Frédéric MALIGNE / LAAS / CNRS Photo library

18
AERIAL ROBOTICS
© LAAS-CNRS

19
HUMANOID ROBOTICS
© Cyril FRÉSILLON / LAAS / CNRS Photo library