Embed Size (px)
Citation preview

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Image Formation and Camera Models
Allen Y. Yang
Berkeley EE 225b
Feb 28th, 2007
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
1 Images and Projection ModelsIntroductionPerspective ProjectionOrthographic Projection
2 Camera ModelsImaging through a Pinhole
3 Camera Intrinsic ParametersLense DistortionsModeling Camera Parameters
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Representation of Images
I : Σ ⊂ R2 → R+; (x , y) 7→ I (x , y).
This Lecture
1 How are images captured from 3-D world to 2-D?
2 Camera projection model?
3 Image formation?
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Perspective Projection
A modern camera projects 3-D world into 2-D image plane through perspective projection:
Properties of perspective projection:Foreshortening: Distance objects are smaller.
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Perspective Projection
Horizon line:
Vanishing points: Parallel lines in 3-D intersect at a point in the image plane.
How many vanishing points in these images?
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Correct perspective projections are visible in paintings.
(a) 1st Century B.C., Pompeii (b) “School of Athens”, Raphael, 1518
More reading: “Perspective” in wikipedia.com.
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Perspective Projection and Illusions
(c) Necker cube (d) Escher waterfall (e) Ames room
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Orthographic Projection Model
Orthographic projection:
The difference between perspective and orthographic was illustrated in Christian artwork:
(f) Perugino Fresco, Vatican (g) Birth of theVirgin, Ukraine
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
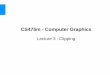
Pinhole camera model (Camera Obscura)
Mo-Zi (5th century BC) −→ Aristotle (300 BC) −→ Da Vinci (1490) −→ Kepler (17th century)
Figure: Pinhole camera model.
Let p = [X , Y , Z ]T ∈ R3, and its image x = [x , y ]T ∈ R2:
x : X = y : Y = −f : Z
Hence, x = −f XZ
, y = −f YZ
.
Question: What is the projection model for orthographic projection?
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Frontal Camera Model
The pinhole camera model is inconvenience that the focal length f is negative.
Figure: Frontal pinhole camera model.
x =[ x
y
]=
f
Z
[XY
].
In homogeneous coordinates:
Z
xy1
=
f 0 0 00 f 0 00 0 1 0
XYZ1
.
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Distortions from Physical Lenses
Pinhole camera model assumes
1 Perfect pinhole camera lenses.
2 Image x = I (p) ∈ R2 be measured in infinite accuracy.
3 Principal point is at the center of the image.
Physical camera lenses give us
1 Distorted imaging projections.
(a) Fish-eye
(b) Nor-mal/Portrait
(c) Tele-photo
2 Finite resolutions defined by the sensing devices in digital cameras.
3 Offset between image center and optical center.
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
Camera Intrinsic Parameters
Figure: Transformation from image coordinates to pixel coordinates.
Modeling the camera distortion
1 Transform from image coordinates (e.g., in metric units) to pixel coordinates.[ xsys
]=
[sx 00 sy
] [ xy
].
2 Translate the image origin.x ′ = xs + ox ; y ′ = ys + oy .
Allen Y. Yang Image Formation and Camera Models

Outline Images and Projection Models Camera Models Camera Intrinsic Parameters
In homogeneous coordinates:
x′ =
x ′
y ′
1
=
sx 0 ox
0 sy oy
0 0 1
xy1
.
Camera Intrinsic Matrix:
K.=
sx 0 ox
0 sy oy
0 0 1
.
Complete transformation from 3-D to 2-D pixel coordinates:
Z
x ′
y ′
1
=
sx 0 ox
0 sy oy
0 0 1
f 0 0 00 f 0 00 0 1 0
XYZ1
=
fsx 0 ox
0 fsy oy
0 0 1
1 0 0 00 1 0 00 0 1 0
XYZ1
.
In short hand,λx′ = KΠ0X.
K is called calibration matrix, Π0 is called (perspective) projection matrix.
Allen Y. Yang Image Formation and Camera Models