Embed Size (px)
Citation preview
IIIT
Hyd
erab
ad
Pose Invariant Palmprint Recognition
Chhaya Methani and Anoop NamboodiriCentre for Visual Information Technology
IIIT, Hyderabad, INDIA
IIIT
Hyd
erab
ad
Palmprint Aquisition
• Controlled pose, scale, and illumination
• High accuracy
• Fixed Scanner/Camera• Restricted Palm
position• Palmprint-Specific• Can we use a generic
camera as the acquisition device?
IIIT
Hyd
erab
ad
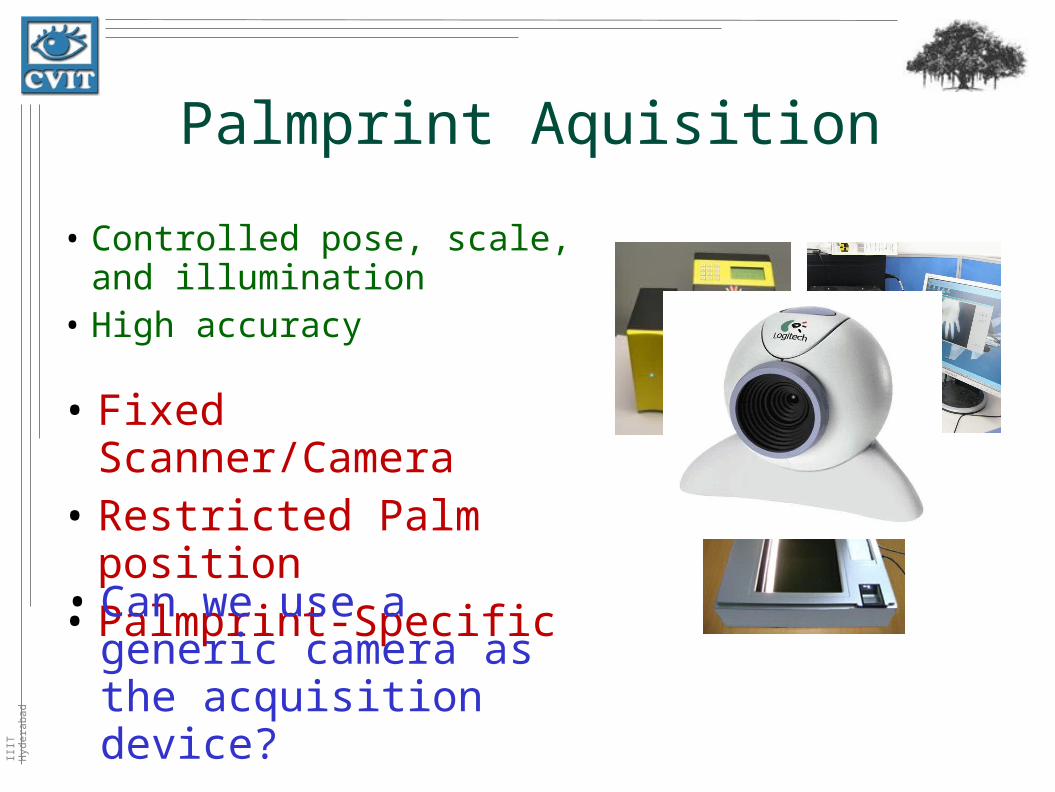
Unrestricted Palmprint Imaging
• Minimal Constraints
• Intuitive, user friendly
• New applications
• Multibiometric sensor
IIIT
Hyd
erab
ad
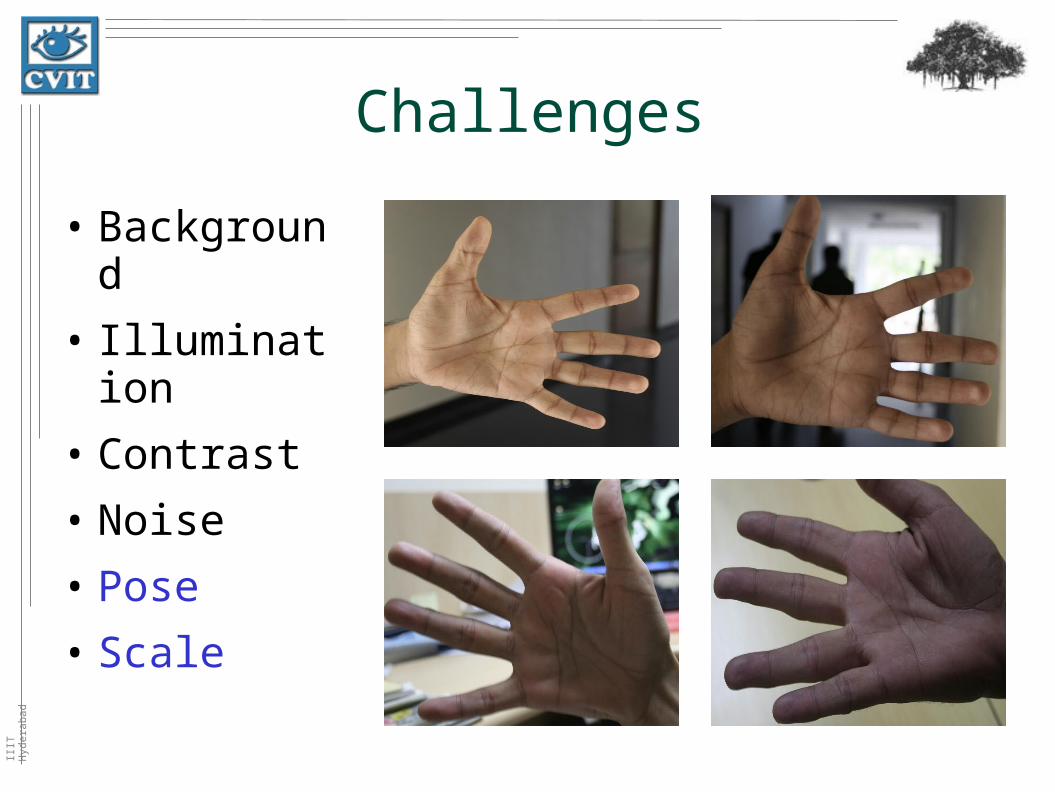
Challenges
• Background
• Illumination
• Contrast
• Noise
• Pose
• Scale
IIIT
Hyd
erab
ad
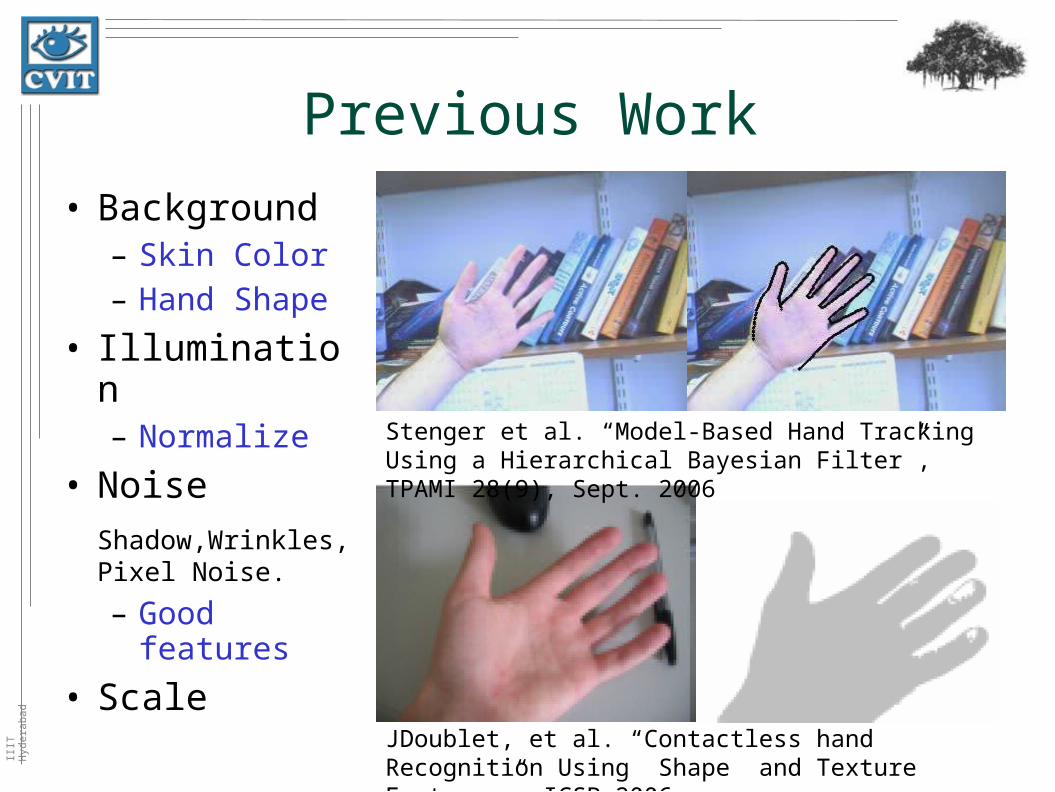
Previous Work• Background
– Skin Color– Hand Shape
• Illumination– Normalize
• NoiseShadow,Wrinkles, Pixel Noise.
– Good features
• Scale
Stenger et al. “Model-Based Hand Tracking Using a Hierarchical Bayesian Filter”, TPAMI 28(9), Sept. 2006
JDoublet, et al. “Contactless hand Recognition Using Shape and Texture Features”, ICSP 2006
IIIT
Hyd
erab
ad
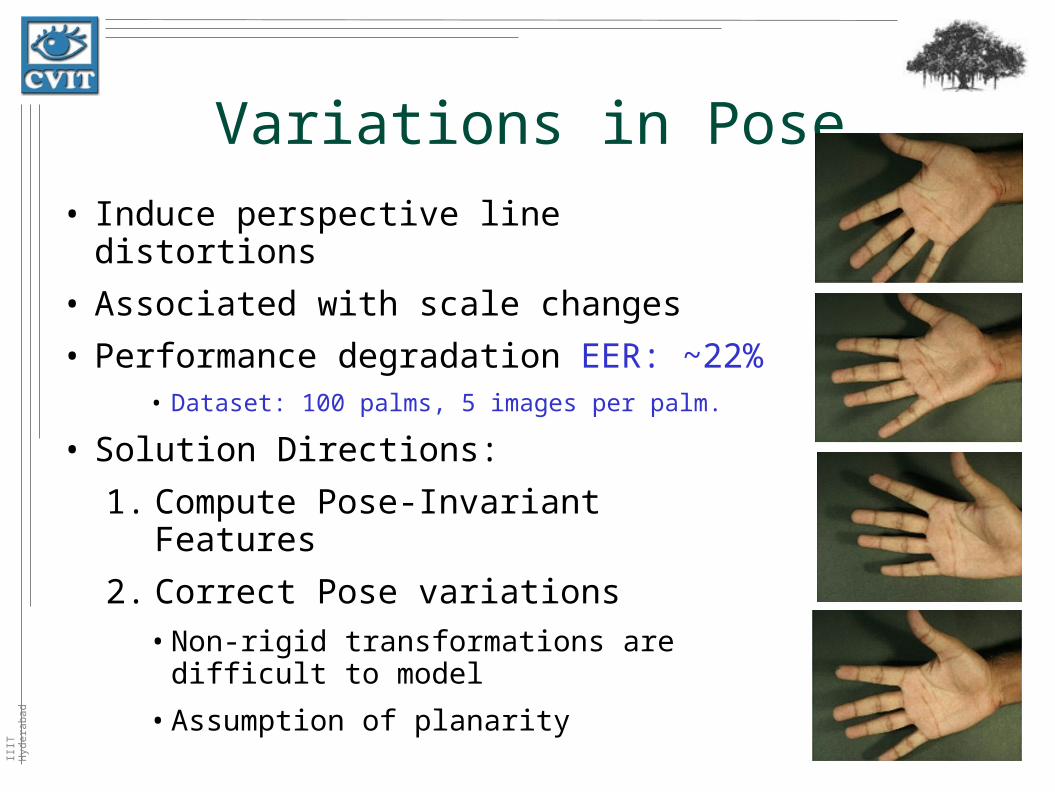
Variations in Pose• Induce perspective line distortions
• Associated with scale changes
• Performance degradation EER: ~22%
• Dataset: 100 palms, 5 images per palm.
• Solution Directions:
1. Compute Pose-Invariant Features
2. Correct Pose variations• Non-rigid transformations are difficult
to model
• Assumption of planarity
IIIT
Hyd
erab
ad
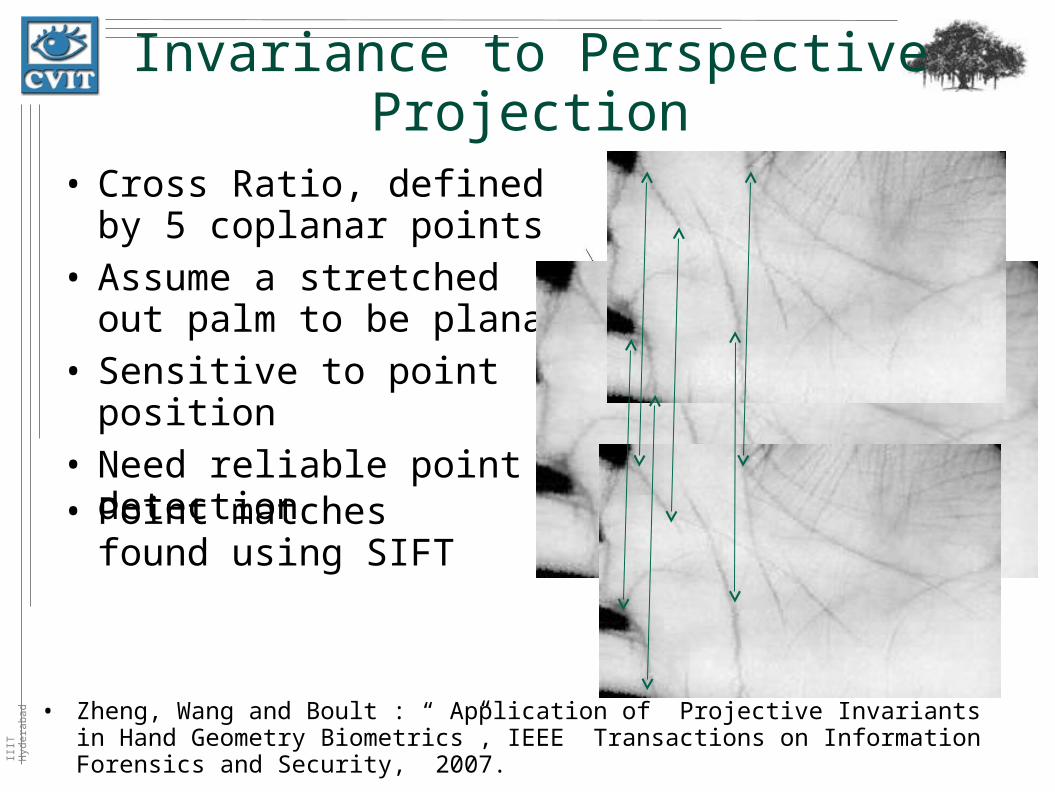
Invariance to Perspective Projection
• Cross Ratio, defined by 5 coplanar points
• Assume a stretched out palm to be planar
• Sensitive to point position
• Need reliable point detection
• Zheng, Wang and Boult : “ Application of Projective Invariants in Hand Geometry Biometrics”, IEEE Transactions on Information Forensics and Security, 2007.
• Point matches found using SIFT
IIIT
Hyd
erab
ad
Finding Pose Transformation Parameters
• Palm considered a planar surface. • Homography defines transformation parameters
between 2 planes given 4 point correspondences are known.–
– Where x'/c and y'/c is the resulting point.
• 4 distinctive point correspondences needed.
IIIT
Hyd
erab
ad
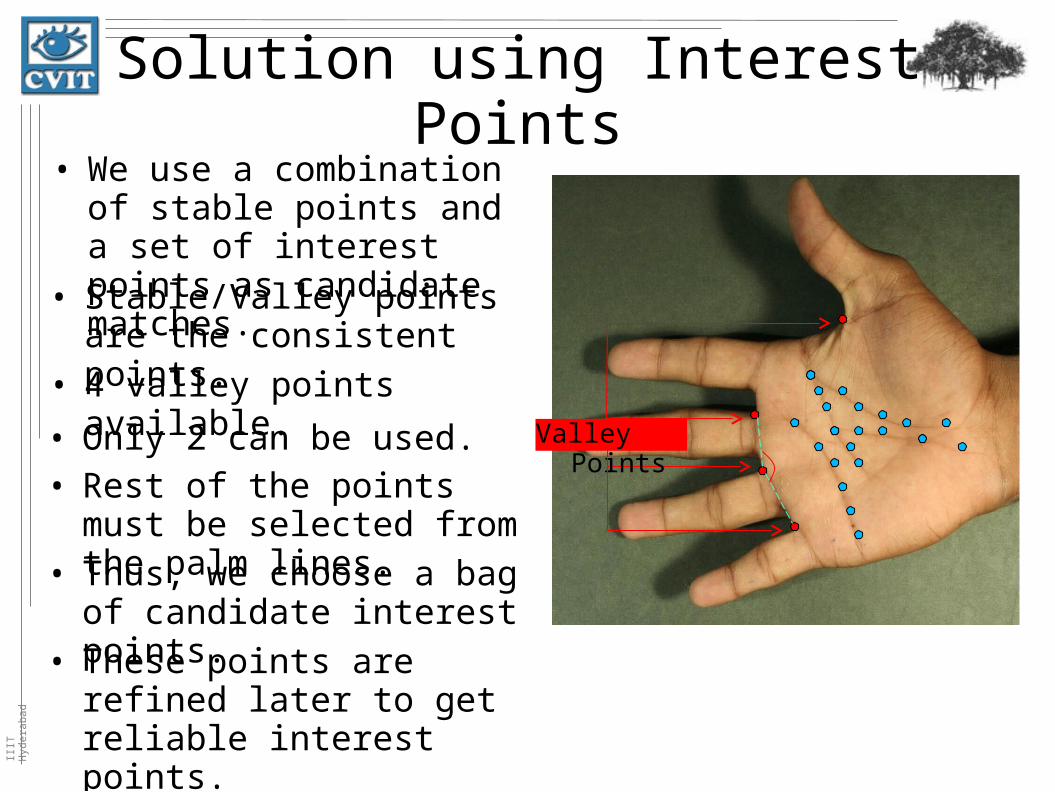
Solution using Interest Points• We use a combination of stable
points and a set of interest points as candidate matches.
• Stable/Valley points are the consistent points.
Valley Points
• 4 valley points available.
• Only 2 can be used. • Rest of the points must be
selected from the palm lines.
• Thus, we choose a bag of candidate interest points.
• These points are refined later to get reliable interest points.
IIIT
Hyd
erab
ad
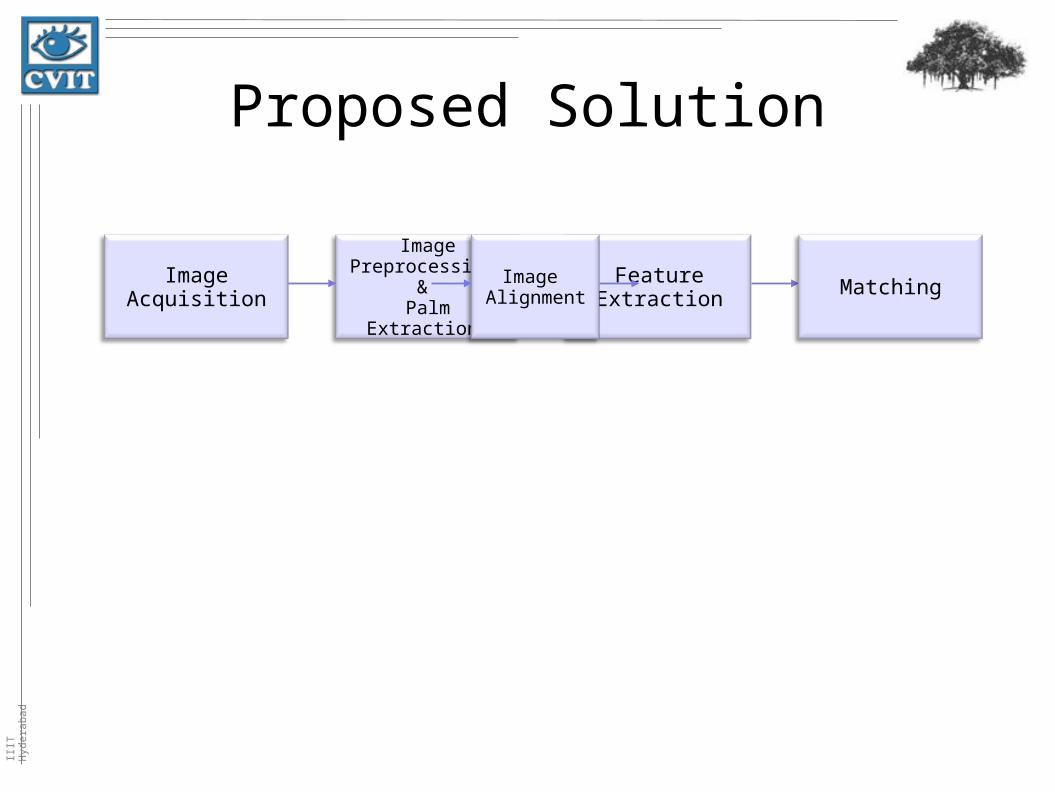
Proposed Solution
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
IIIT
Hyd
erab
ad
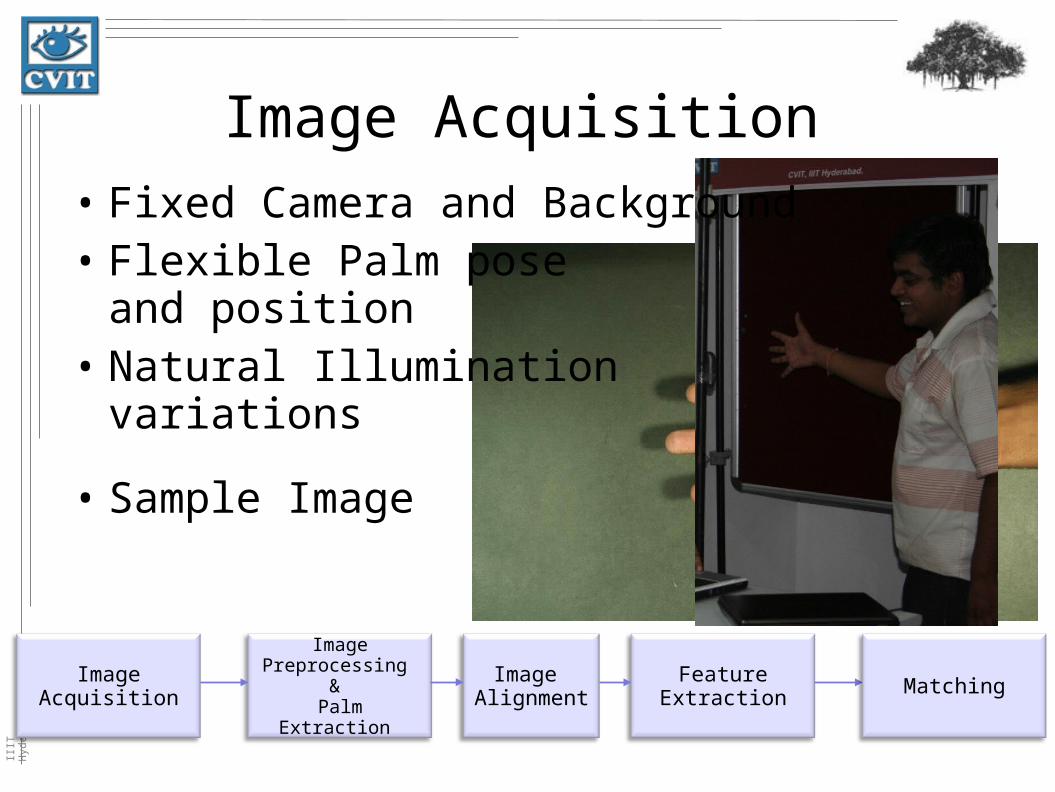
Image Acquisition
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
• Fixed Camera and Background• Flexible Palm pose
and position• Natural Illumination
variations
• Sample Image
IIIT
Hyd
erab
ad
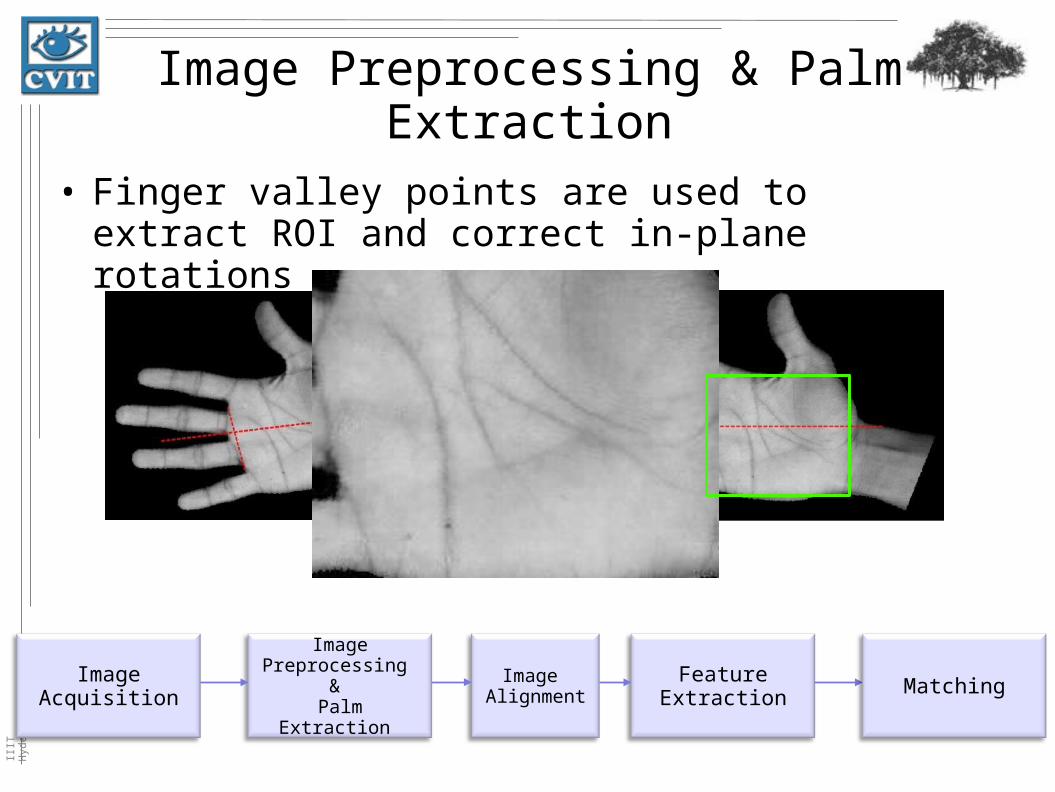
Image Preprocessing & Palm Extraction
• Finger valley points are used to extract ROI and correct in-plane rotations
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
IIIT
Hyd
erab
ad
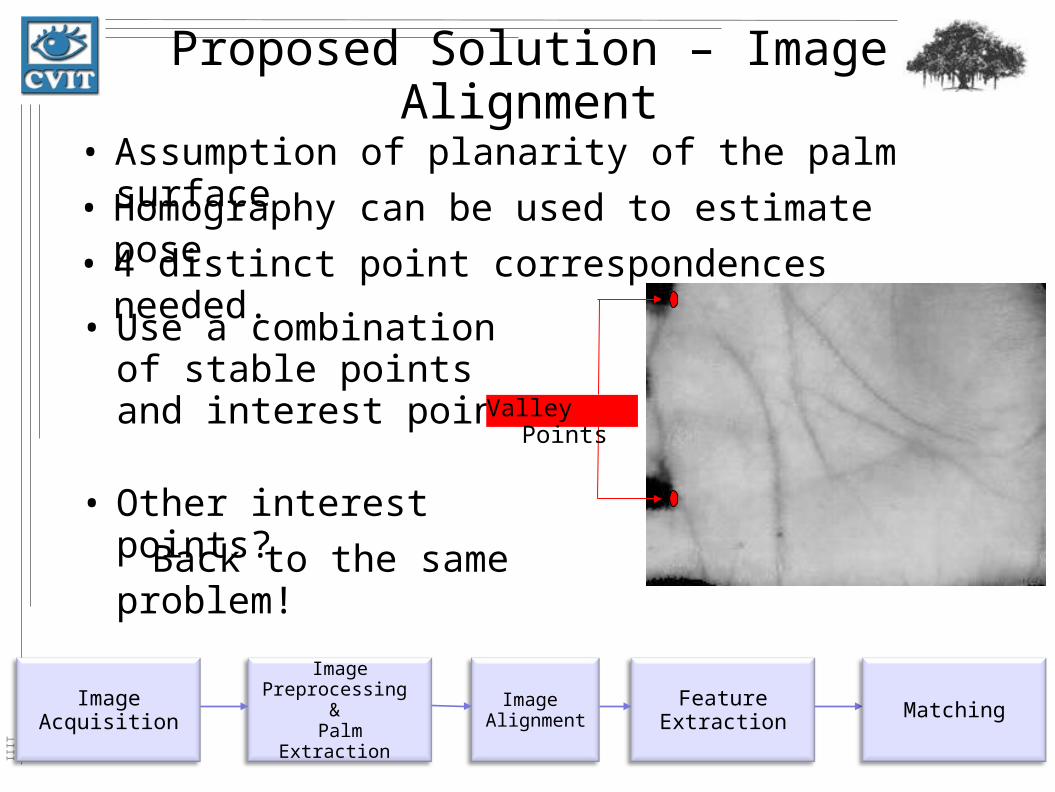
Proposed Solution – Image Alignment
• Assumption of planarity of the palm surface
• Homography can be used to estimate pose
• 4 distinct point correspondences needed.
Back to the same problem!
• Use a combination of stable points and interest points
Valley Points
• Other interest points?
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
IIIT
Hyd
erab
ad
Proposed Solution – Image Alignment
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
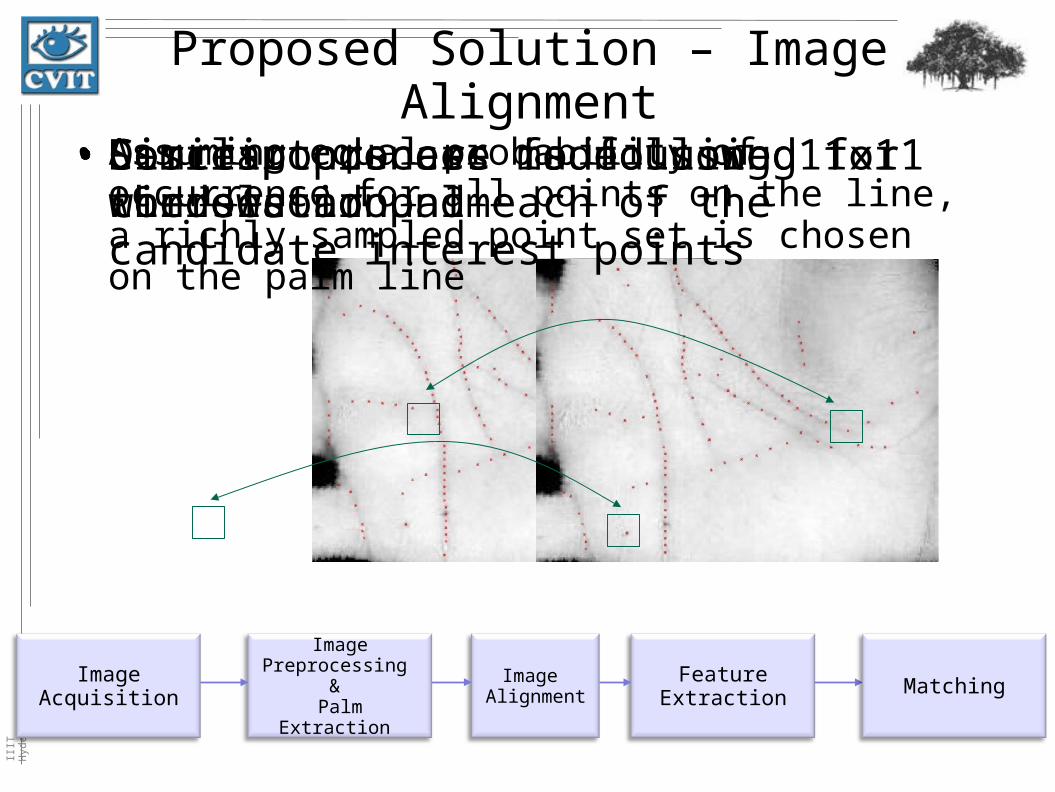
• Descriptors are made using 11x11 windows around each of the candidate interest points
• Correspondences found using correlation• Similar process is followed for the second palm• Assuming equal probability of occurrence for all points on the line, a richly sampled point set is chosen on the palm line
IIIT
Hyd
erab
ad
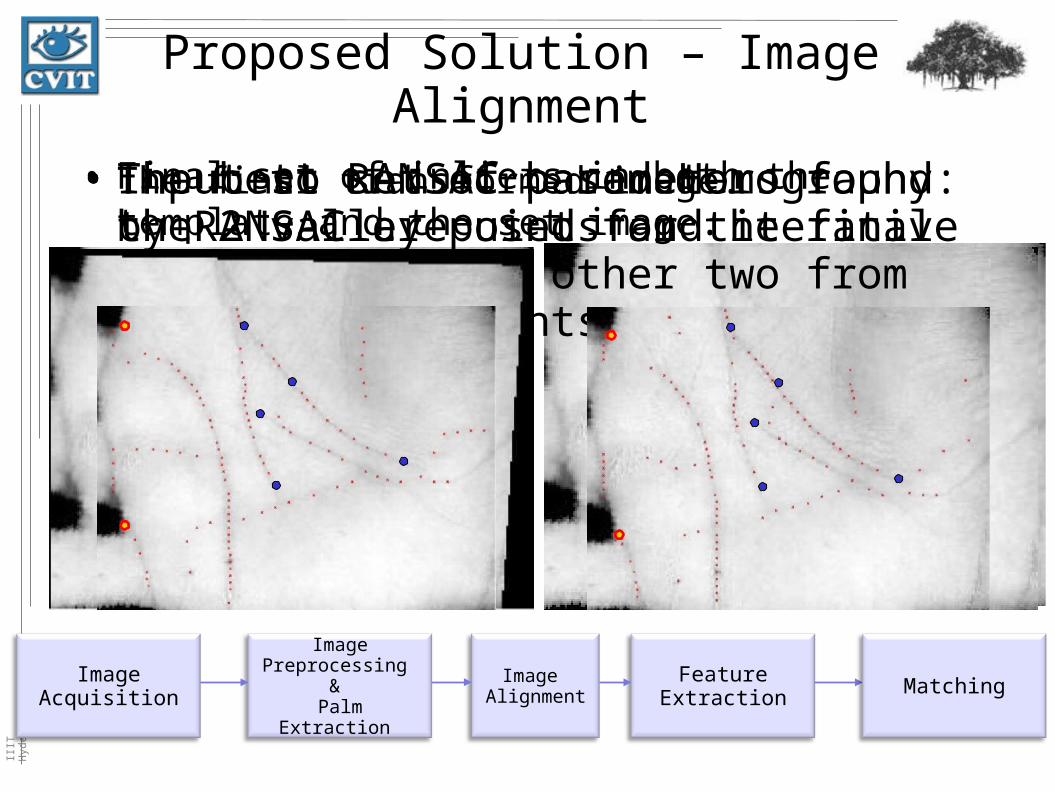
Proposed Solution – Image Alignment
• Input to RANSAC based Homography: the 2 valley points and iterative selection of the other two from the interest points.
• Final set of inliers in both the template and the set image. • The best set of parameters found by RANSAC are used for the final transformation.
• The final transformed image.
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
IIIT
Hyd
erab
ad
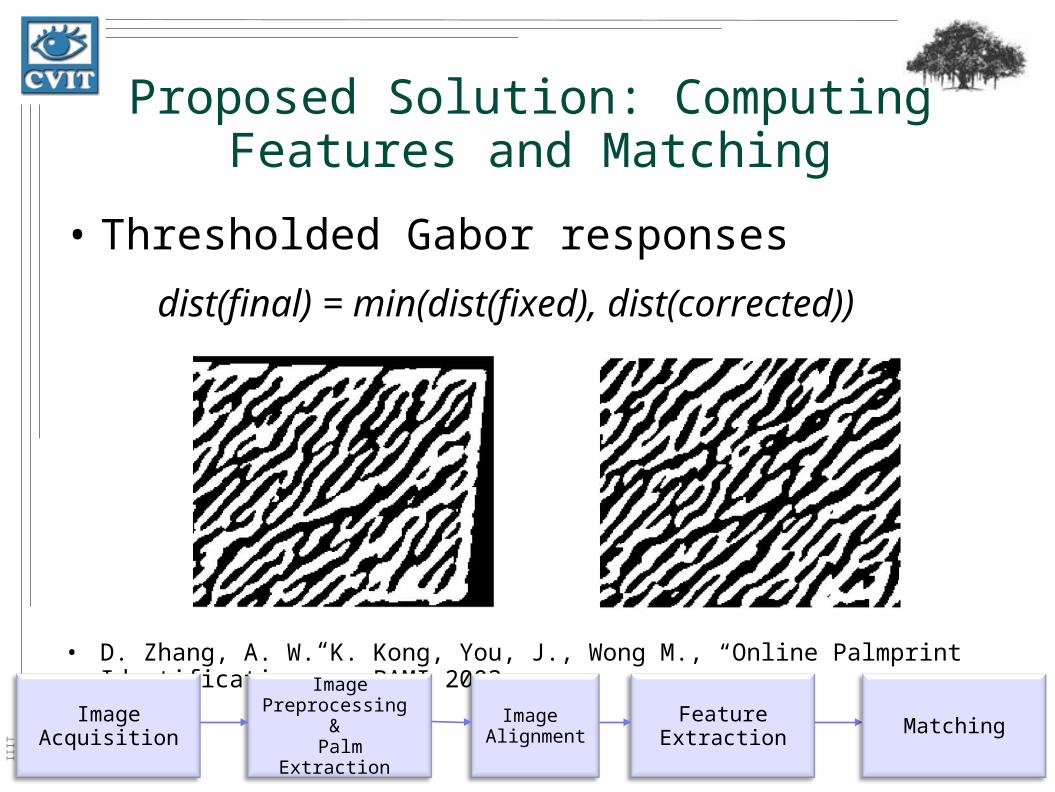
Proposed Solution: Computing Features and Matching
• Thresholded Gabor responses
• D. Zhang, A. W. K. Kong, You, J., Wong M., “Online Palmprint Identification” , PAMI 2003.
Image Preprocessing
& Palm Extraction
Image Acquisition
Feature Extraction MatchingImage
Alignment
dist(final) = min(dist(fixed), dist(corrected))
IIIT
Hyd
erab
ad
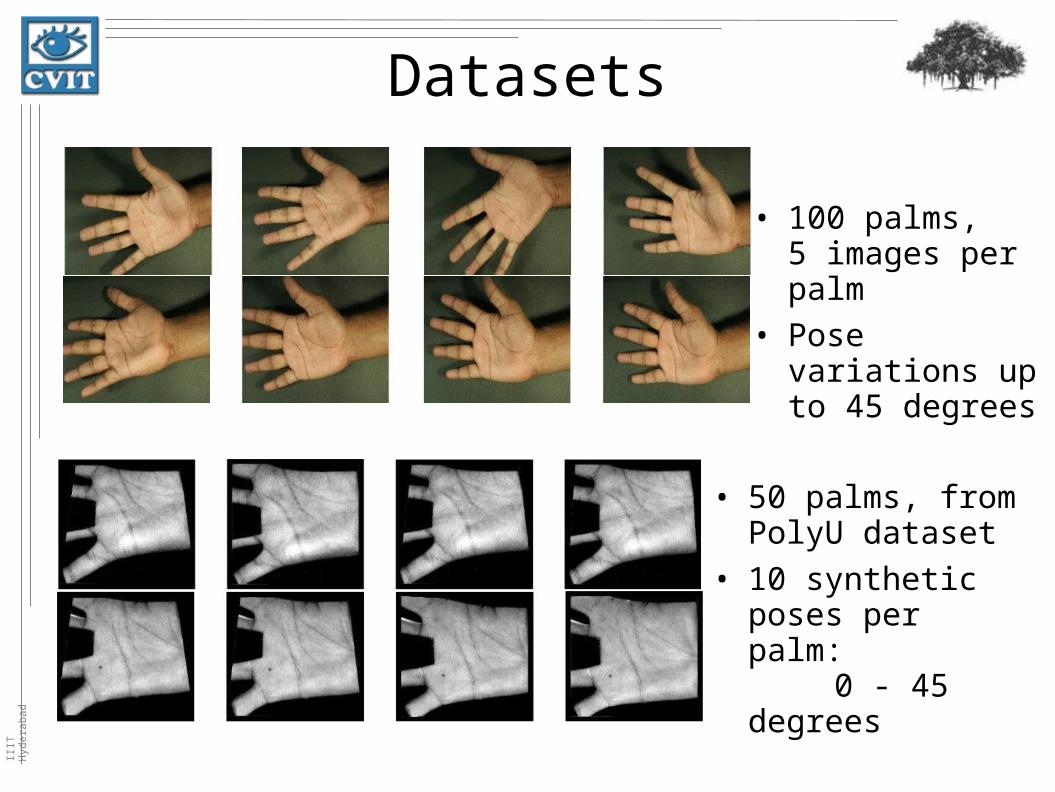
Datasets
• 100 palms, 5 images per palm
• Pose variations up to 45 degrees
• 50 palms, from PolyU dataset
• 10 synthetic poses per palm:
0 - 45 degrees
IIIT
Hyd
erab
ad
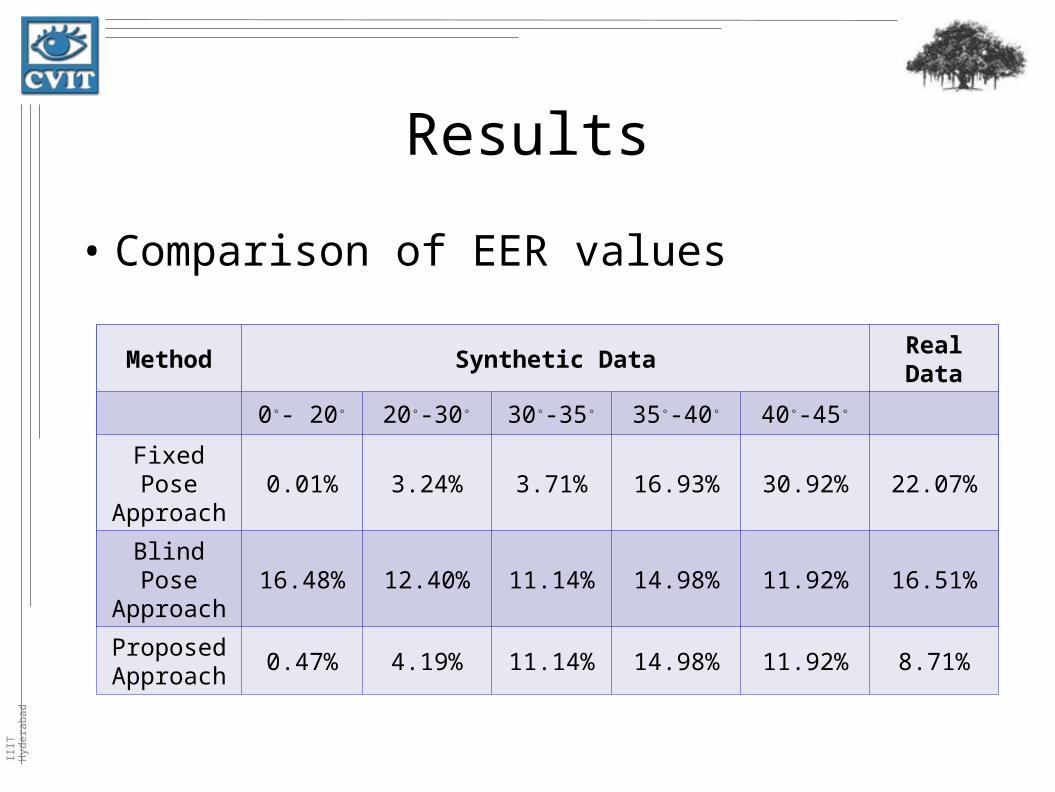
Results
• Comparison of EER values
Method Synthetic Data Real Data
0◦- 20◦ 20◦-30◦ 30◦-35◦ 35◦-40◦ 40◦-45◦
Fixed Pose Approach
0.01% 3.24% 3.71% 16.93% 30.92% 22.07%
Method Synthetic Data Real Data
0◦- 20◦ 20◦-30◦ 30◦-35◦ 35◦-40◦ 40◦-45◦
Fixed Pose Approach
0.01% 3.24% 3.71% 16.93% 30.92% 22.07%
Blind Pose Approach
16.48% 12.40% 11.14% 14.98% 11.92% 16.51%
Method Synthetic Data Real Data
0◦- 20◦ 20◦-30◦ 30◦-35◦ 35◦-40◦ 40◦-45◦
Fixed Pose Approach
0.01% 3.24% 3.71% 16.93% 30.92% 22.07%
Blind Pose Approach
16.48% 12.40% 11.14% 14.98% 11.92% 16.51%
Proposed Approach
0.47% 4.19% 11.14% 14.98% 11.92% 8.71%
IIIT
Hyd
erab
ad
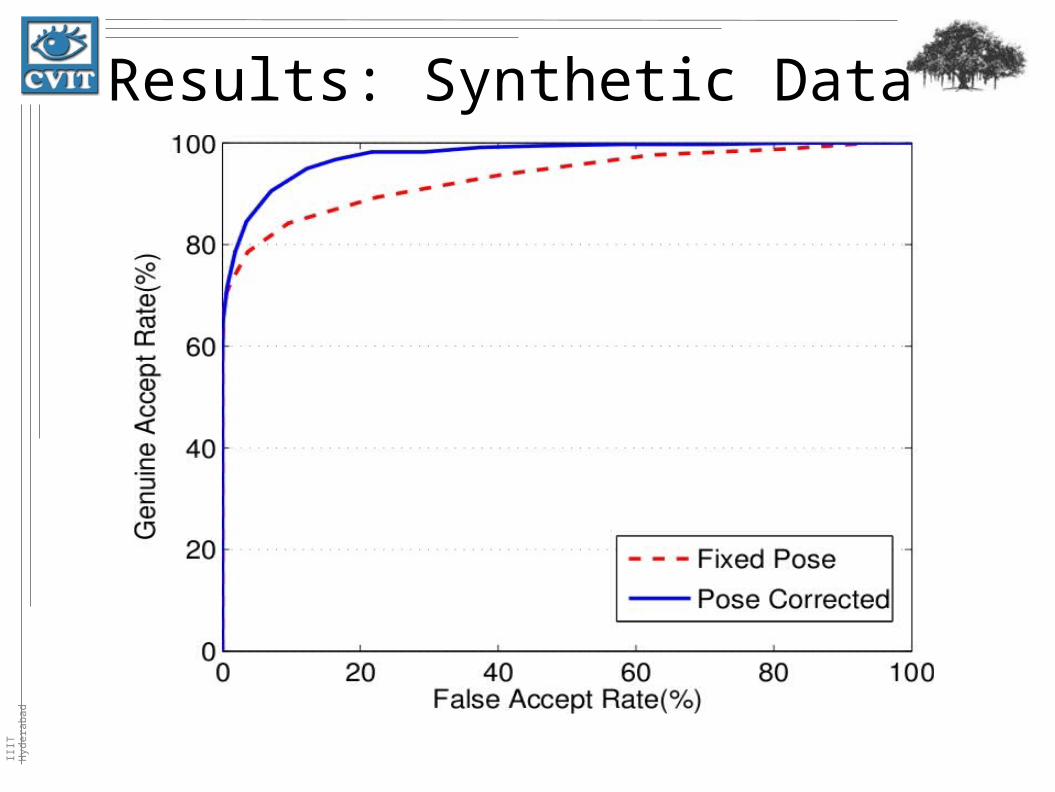
Results: Synthetic Data
IIIT
Hyd
erab
ad
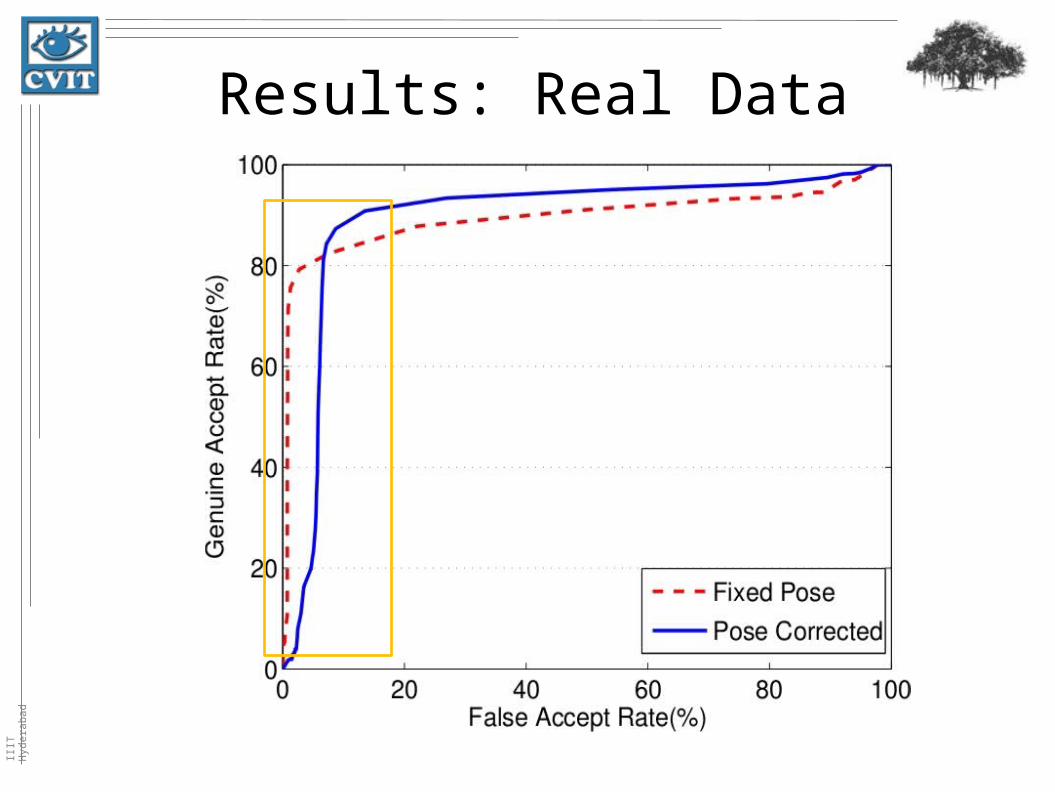
Results: Real Data
IIIT
Hyd
erab
ad
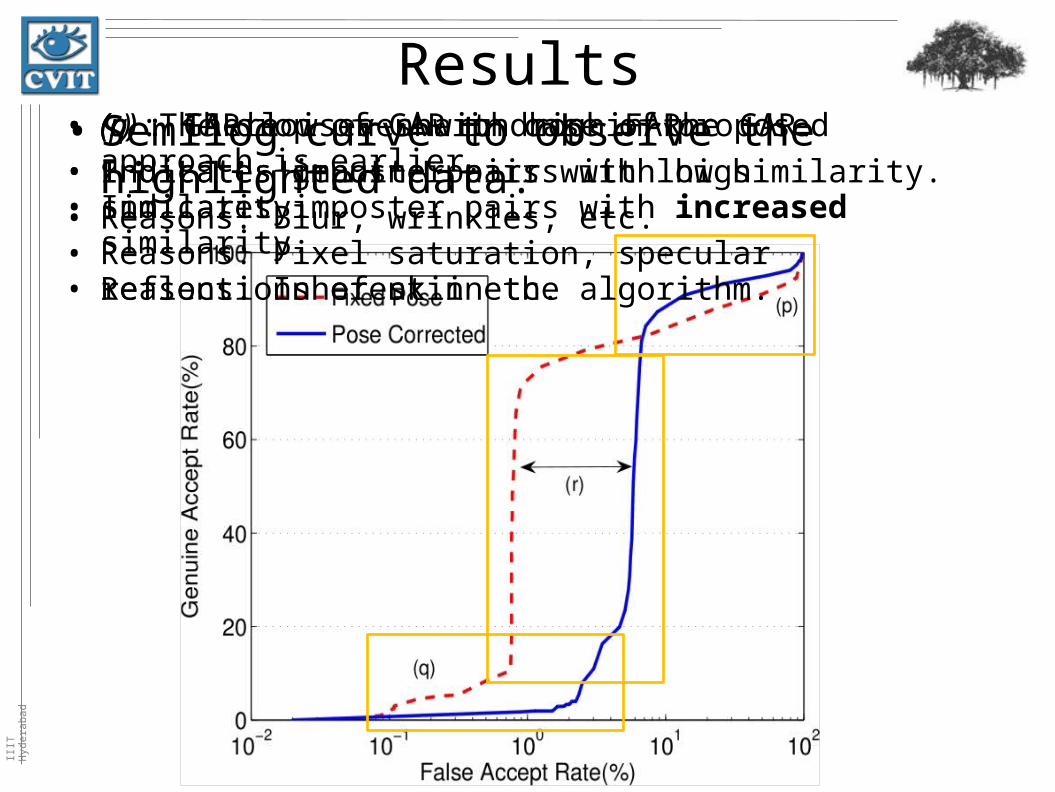
Results• Semilog curve to observe the highlighted data.• (p) : GAR low even with high FAR.
• Indicates genuine pairs with low similarity.
• Reasons: Blur, wrinkles, etc.
• (q) : There is a sharp drop in the GAR.
• Indicates imposter pairs with high similarity.
• Reasons: Pixel saturation, specular reflections of skin etc.
• (r) :The drop of GAR in case of proposed approach is earlier.
• Indicates imposter pairs with increased similarity.
• Reasons: Inherent in the algorithm.
IIIT
Hyd
erab
ad
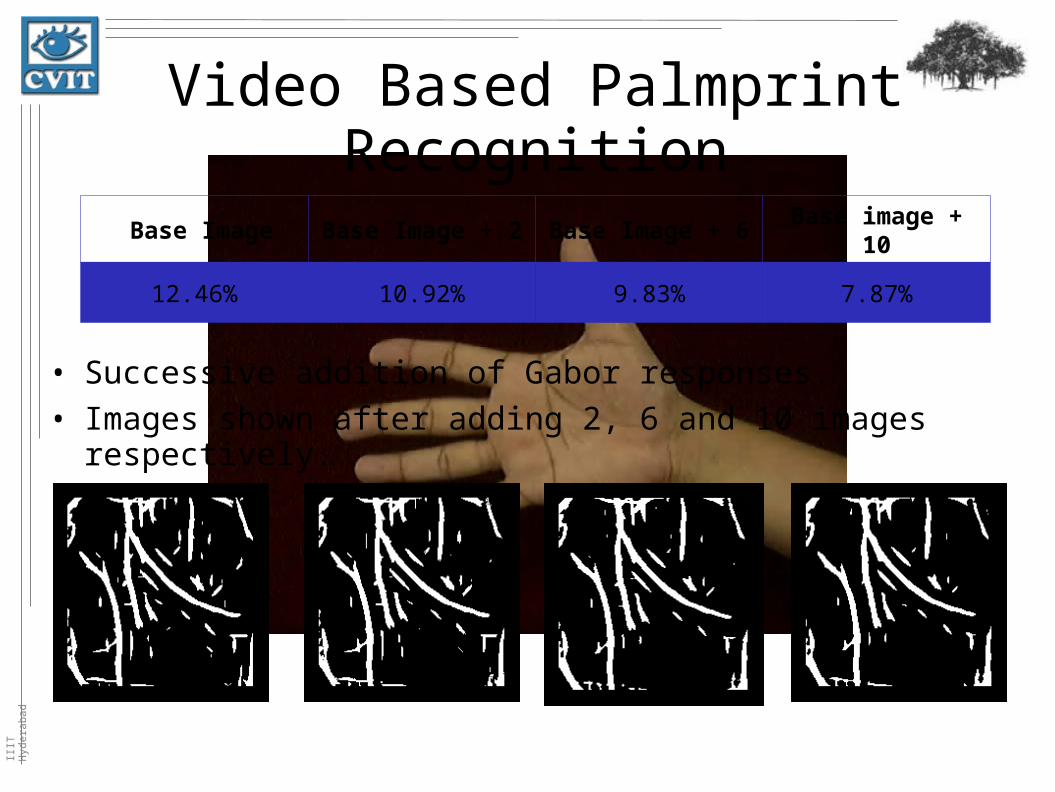
Video Based Palmprint Recognition
Base ImageBase Image +
2Base Image +
6Base image +
10
12.46% 10.92% 9.83% 7.87%
• Successive addition of Gabor responses.
• Images shown after adding 2, 6 and 10 images respectively.
IIIT
Hyd
erab
ad
Conclusion/Observation• Proposed view invariant recognition system for Palmprint.• Very difficult to find point correspondences for palm.• Solution using point correspondence of stable and interest
points.• RANSAC based Homography used to choose from approximate
point correspondences.• Major role played by illumination variations and noise.• Video based palmprint recognition is a possible solution.• Future Work: To study the effects of video based palmprint
recognition in further in more detail.
IIIT
Hyd
erab
ad
Thank You