Embed Size (px)
Citation preview

iii
AN OBSERVER DESIGN FOR ACTIVE SUSPENSION SYSTEM
ADIZUL AHMAD
This project report is submitted in partial of the fulfillment of the
requirement for the award of the Master of Engineering (Electrical - Mechatronics &
Automatic Control)”
Faculty of Electrical Engineering
Universiti Teknologi Malaysia
NOVEMBER, 2005

v
DEDICATION
This thesis is dedicated to my beloved parent, Ahmad Bin Razak and Halimah Binti Haji
Dris, my sisters, Noormadiad and Zuhana,to my brother Azman and not forgotten to all
my friend, thank you for the sacrifice and support.
May Allah bless all of you. Amin!
vi
ACKNOWLEDGEMENT
In the name of ALLAH SWT, the most Gracious, who has given me the strength
and ability to complete this study. All perfect praises belong to ALLAH SWT, lord of
the universe. May His blessing upon the prophet Muhammad SAW and member of his
family and companions.
I gratefully acknowledge the co-operation of Associate Professor Dr. Yahaya
Md. Sam who has provided me with the reference, guidance, encouragement and support
in completing this thesis. All the regular discussion sessions that we had throughout the
period of study have contributed to the completion of this project.
Thank you to my classmate for providing an enjoyable study environment.
Finally, I would like to thank my family for their encouragement, support and patience.

vii
PUBLICATION
The following paper, based on the work described in this thesis, has been
submitted for publishing:
1. Adizul Ahmad, Yahaya Md. Sam and Nor Maniha Abd. Ghani . “An
Observer Design for Active Suspension System” Accepted for oral
presentation in The International Conference on Mechatronics
Technology (ICMT05), Kuala Lumpur, Malaysia, 5-8 December 2005.
viii
ABSTRACT
The purpose of this project is to construct an active suspension control for a
quarter car model subject to excitation from a road profile using an improved sliding
mode control with an observer design. The proportional-integral sliding mode was
chosen as a control strategy, and the road profile is estimated by using an observer
design. The performance of controller will be compared with the LQR controller. There
are three parameters to be observed in this study namely, wheel deflection, the body
acceleration and the suspension travel. The performance of this controller will be
determined by performing computer simulations using the MATLAB and SIMULINK
toolbox.

ix
ABSTRAK
Cadangan untuk projek ini adalah untuk membina model sistem gantungan aktif
yang subjek keatas permukaan jalan dengan menggunakan kawalan ragam gelincir yang
di pertingkatkan keupayaan dengan penggunaan pemerhati. Kawalan ragam gelincir
berkadaran-kamiran di pilih sebangai pengawal dan permukaan jalan di perhati dengan
menggunakan pemerhati. Prestasi pengawal yang di perkenalkan di analisis prestasi
dengan pegawal jenis LQR. Tiga parameter output diperhatikan yang di namai, pantulan
tayar, halaju badan dan pergerakan gantungan. Prestasi pengawal akan di analisis dengan
menggunakan penyelakuan komputer aturcara MATLAB dengan SIMULINK yang
mudah di guna pakai.
x
TABLE OF CONTENTS
CHAPTER TITLE
PAGE
DECLARATION ii
DEDICATION iii
ACKNOWLEDGEMENT iv
PUBLICATION v
ABSTRACT vi
ABSTRAK x
TABLE OF CONTENT viii
LIST OF TABLE xvi
LIST OF FIGURES xvii
1 INTRODUCTION
1.1 Suspension System 1
1.2 Active Suspension System Control Strategies 5
1.3 Objective of Study 5
1.4 Scope of Work 6
1.5 Structure and Layout of Thesis 7
2 SYSTEM MODEL
2.1 Introduction 8
2.2 Car Suspension System 9
xi
2.2.1 Passive Suspension System 9
2.2.2 Active suspension System 12
2.3 Road Profile 16
2.4 Conclusion 17
3 PROPORTIONAL INTEGRAL SLIDING MODE CONTROL
3.1 Introduction 18
3.2 Proportional Integral Sliding Mode Control Design 19
3.2.1 Switching Surface design 20
3.2.2 Stability During Sliding Mode 22
3.2.3 Controller Design 24
3.3 Improve Performance 25
3.4 Conclusion 26
4 OBSERVER DESIGN
4.1 Introduction 27
4.2 Literature Review on Observer Design 27
4.3 Observer design 29
5 SIMULATION
5.1 Simulations 34
5.1.1 Performance of PISMC on Road Handling and Ride
Comfort 36
5.1.2 Effect of the Suspension Performance on Various
Road Profiles 46
5.1.3 Effect of the reaching Mode condition on varying Design
Parameter, ρ 49
5.2 Conclusion 53
xii
6 CONCLUSION AND SUGGESTIONS
6.1 Conclusion 54
6.2 Suggestion For Future Research 55
REFERENCES 56
xiii
LIST OF TABLES
TABLE TITLE
PAGE
2.1 Parameter value for quarter car model 9
xiv
LIST OF FIGURES
FIGURE TITLE
PAGE
1.1 The passive suspension system 2
1.2 The semi-active suspension system 3
1.3 The active suspension system 4
2.1 The passive suspension system 10
2.2 The active suspension for the quarter car model 13
2.3 Road profile represented a 10 cm bump 16
5.1 Road profile that generated to the system 38
5.2 Estimated road profile for the system using PISMC 39
5.3 Estimated road profile for the system using LQR controller 39
5.4 Wheel deflection fro active suspension system 40
5.5 Body acceleration for active suspension system 40
5.6 Suspension travel of active suspension 41
5.7 Sliding surface 41
5.8 Control input ot the active suspension 42
5.9 Wheel deflection between plant observer using LQR controller 43
5.10 Wheel deflection between plant observer using PISMC 43
5.11 Body acceleration between plant observer using LQR controller 44
5.12 Body acceleration between plant observer using PISMC 44
5.13 Suspension travel between plant observer using LQR controller 45
5.14 Suspension travel between plant observer using PISMC 45
5.15 Body acceleration for active suspension system for road profile 1 46
5.16 Suspension travel of active suspension for road profile 1 47
5.17 Wheel deflection of active suspension for road profile 1 47
xv
5.18 Body acceleration for active suspension system for road profile 2 48
5.19 Wheel deflection of active suspension for road profile 2 48
5.20 Suspension travel of active suspension for road profile 2 49
5.21 Body acceleration for varying the parameter
ρ( positive sliding gain) 50
5.22 Body acceleration for varying the parameter
ρ( negative sliding gain) 50
5.23 Suspension travel for varying the parameter
ρ( positive sliding gain) 51
5.24 Suspension travel for varying the parameter
ρ( negative sliding gain) 51
5.25 Wheel deflection for varying the parameter
ρ( positive sliding gain) 52
5.26 Wheel deflection for varying the parameter
ρ( negative sliding gain) 52
1
CHAPTER 1
INTRODUCTION
1.1 Suspension System
Comfort and road-handling performance are the characteristics that have to be
considered in order to achieve a good suspension system. Ideally, the suspension should
isolate the body from road disturbance and inertial disturbances associated with
cornering and braking or acceleration. The suspension must also be able to minimize the
vertical force transmitted to the passengers for their comfort. This objective can be
achieved by minimizing the vertical car body acceleration [1].
Generally, a suspension system for a car is categorized as passive, semi-active
and active suspension system. A passive system is a conventional suspension that
consists of the conventional spring and shock absorber as shown in figure 1.1. The
springs are assumed to have almost linear characteristics; while, most of the shock
absorbers exhibit nonlinear relationship between force and velocity. In passive system,
these elements have fixed characteristics. When the suspension system must operate
over a wide range of conditions, there should be a compromise in choosing the spring
2
stiffness and damping parameters. In other words, it is desirable that the above
parameters could be adjustable to improve the performance of the system.
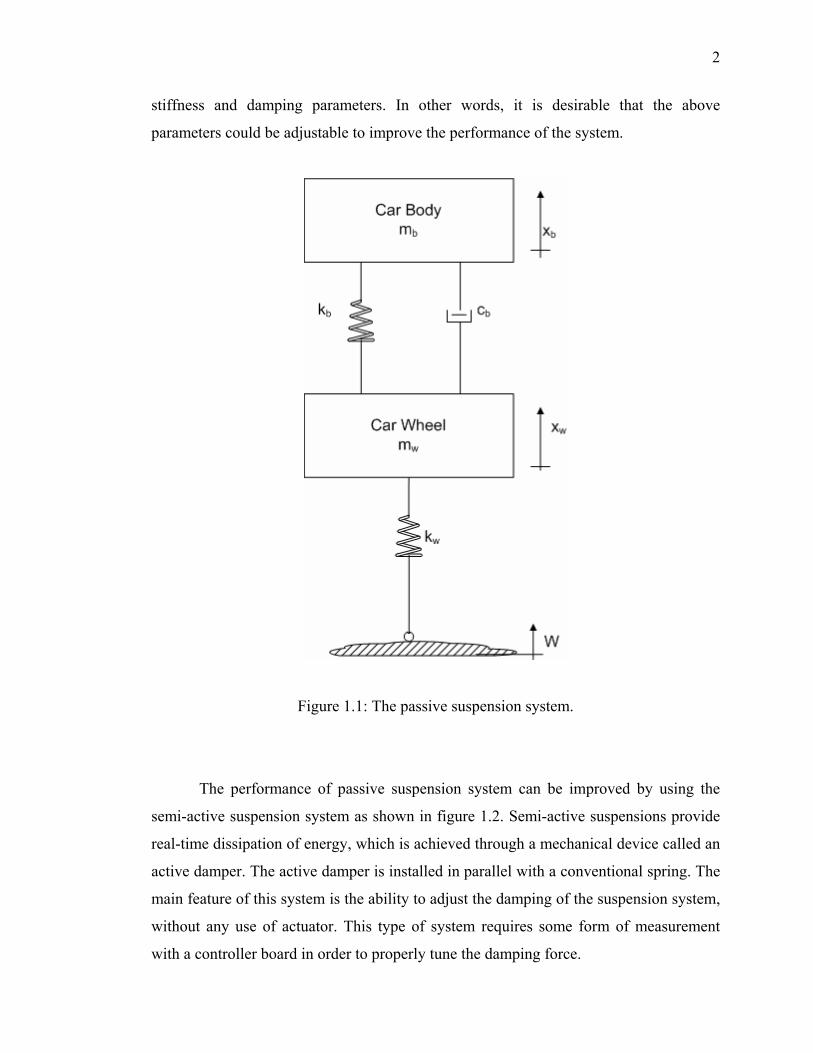
Figure 1.1: The passive suspension system.
The performance of passive suspension system can be improved by using the
semi-active suspension system as shown in figure 1.2. Semi-active suspensions provide
real-time dissipation of energy, which is achieved through a mechanical device called an
active damper. The active damper is installed in parallel with a conventional spring. The
main feature of this system is the ability to adjust the damping of the suspension system,
without any use of actuator. This type of system requires some form of measurement
with a controller board in order to properly tune the damping force.
3
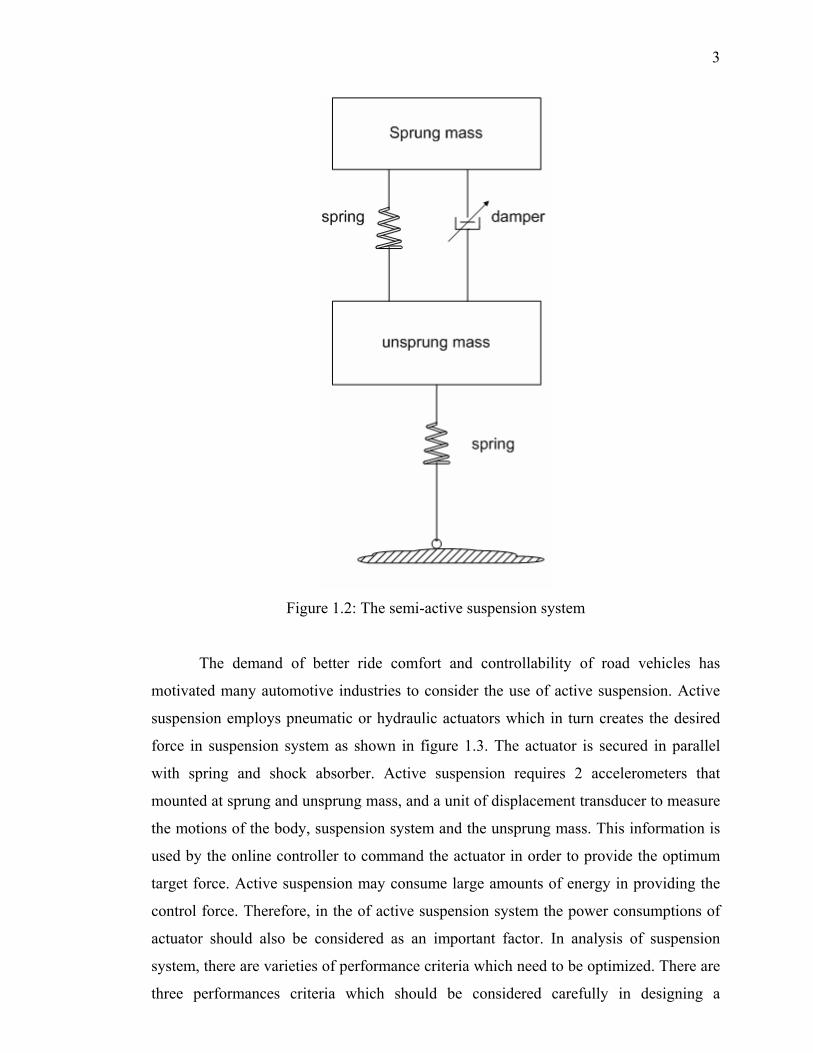
Figure 1.2: The semi-active suspension system
The demand of better ride comfort and controllability of road vehicles has
motivated many automotive industries to consider the use of active suspension. Active
suspension employs pneumatic or hydraulic actuators which in turn creates the desired
force in suspension system as shown in figure 1.3. The actuator is secured in parallel
with spring and shock absorber. Active suspension requires 2 accelerometers that
mounted at sprung and unsprung mass, and a unit of displacement transducer to measure
the motions of the body, suspension system and the unsprung mass. This information is
used by the online controller to command the actuator in order to provide the optimum
target force. Active suspension may consume large amounts of energy in providing the
control force. Therefore, in the of active suspension system the power consumptions of
actuator should also be considered as an important factor. In analysis of suspension
system, there are varieties of performance criteria which need to be optimized. There are
three performances criteria which should be considered carefully in designing a
4
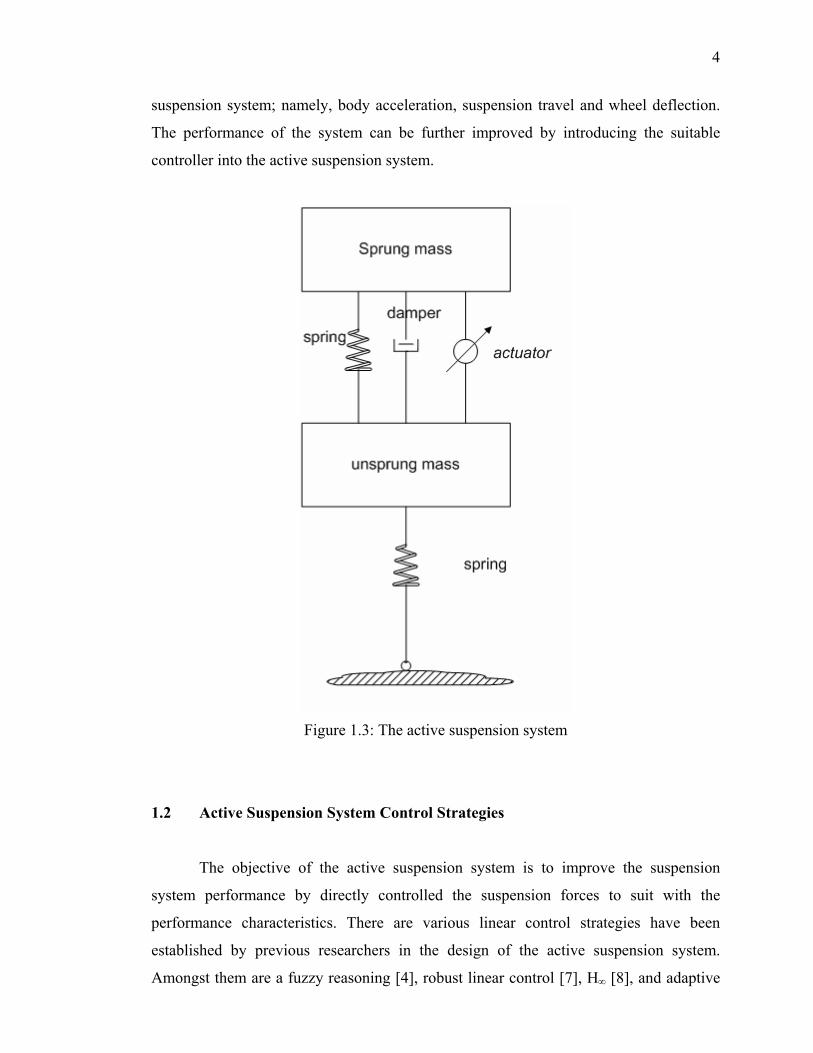
suspension system; namely, body acceleration, suspension travel and wheel deflection.
The performance of the system can be further improved by introducing the suitable
controller into the active suspension system.
Figure 1.3: The active suspension system
1.2 Active Suspension System Control Strategies
The objective of the active suspension system is to improve the suspension
system performance by directly controlled the suspension forces to suit with the
performance characteristics. There are various linear control strategies have been
established by previous researchers in the design of the active suspension system.
Amongst them are a fuzzy reasoning [4], robust linear control [7], H∞ [8], and adaptive
5
observer [9]. The results of the study have demonstrated that active suspension system is
more effective in the vibration isolation of the car body is compared with passive
system.
The purpose of this study is to utilize the concept of proportional integral sliding
mode control in active suspension system [1, 2, 5, 6,] with observer design for road
estimator. Therefore, the estimated road disturbance will be another state for the system.
1.3 Objective of study
The objectives of this research are as follows:
I. To develop the mathematical model of quarter car active suspension system with
an observer.
II. To design an observer that act as a road profile estimator for the active
suspension system.
III. To design a Proportional Integral Sliding Mode Control (PISMC) for the quarter
car active suspension system.
IV. To study the performance of the PISMC with a disturbance observer.
Theoretical verification of the proposed controller and observer on its stability and
reachability will be accomplished by using a Lyapunov’s second method. The
performance of the active suspension system will be observed by using extensive
computer simulation that will be performed using MATLAB software and SIMULINK
Toolbox subjected to various types of road profiles and parameter value.
6
1.4 Scope of work
The scopes of work for this study are as follows:
I. Familiarization of a quarter car active suspension system with Proportional-
Integral Sliding Mode Controller
II. Mathematical derivation of an observer for a quarter car active suspension
system.
III. Design an Observer for a quarter car active suspension system using Sliding
Mode Control technique.
IV. Perform a simulation works by using a MATLAB/Simulink to observe
effectiveness of the observer.
V. Compare the performance of the proposed PISMC with Observer design with
Validate with a Linear Quadratic Regulator (LQR) technique.
1.5 Structure and Layout of Thesis
The necessary components for achieving objective of the study are given in the
succeeding chapters. The mathematical modeling of a quarter car is derived in chapter 2.
The state space representation of the dynamic model of the passive, semi active and
active suspension system are outlined. Finally, various road profiles that represent the
uncertainty in the suspension systems will be represented.
In chapter 3, the proposed controller, proportional integral sliding mode control
with disturbance observer is presented. By using a Lyapunov’s stability theory, it will be
shown that for the system with mismatched uncertain, the system is bounded stable. In
chapter 4 discussion on an observer design is performed. The literature review and
mathematical model will discuss in this chapter.
7
Chapter 5 represents the computer simulation for the proposed observer and
controller. In this chapter, the performance of road handling and ride comfort will be
compared with the LQR controller. To assure the robustness of the proposed observer,
various road profiles will be applied in the system. The chattering and boundary layer
effect of the controller will be presented by varying the parameter in the continuous
switching gain.
The summary of the result and future research based on this study will be
presented in chapter 6.
54
REFERENCES
[1] Yahaya Md Sam. (2004).“Modeling and Control of Active Suspension System Using
PI Sliding Mode control”, Universiti Teknologi Malaysia, PhD Thesis.
[2] Yahaya Md Sam, Johari Halim Shah Osman., and Mohd Ruddin Abd Ghani. ( 2003),
“A Class of Proportional Integral Sliding Mode Control with Application to Active
Suspension System”, System and Control Letter,pp.217-223
[3] Yahaya Md Sam, Johari Halim Shah Osman., and Mohd Ruddin Abd Ghani. (2002),
“A Class Of Sliding Mode Control for Mismatched Uncertain Systems”, Student
Conference On Research and Development Proceedings (SCOReD 2002), Shah Alam,
Malaysia, pp.31-4.
[4] T. Yoshimura, A. Nakminami, M. Kurimoto And J. Hino. (1999), “Active
Suspension of Passenger Cars Using Linear and Fuzzy logic Control”, Control
Engineering Practice, pp 41-47
[5] T. Yoshimura, A. Kume, M. Kurimoto And J. Hino. (2001), “Construction of an
Active Suspension System of a Quarter Car Model Using the Concept of Sliding Mode
Control”, Journal of Sound and Vibration, pp 187-199
55
[6] T. Yoshimura, S. Matumura, M. Kurimoto and J. Hino. (2002), “Active Suspension
System of One-Wheel Car Models Using The Sliding Mode Control with VSS
Observer”, International Journal of Vehicle Autonomous Systems, Vol 1, No 1.
[7] Christophe Lauwerys, Jan Swever, Paul Sas, “Robust Linear Control of an Active
Suspension System on a Quarter Car Test-rig”, Control Engineering Practice.
[8] S. Ohsaku, T. Nakayama, I. Kamimura, Y. Motozono. (1999), “Nonlinear H∞ Con
trol For Semi-active”, JSAE Review 20, pp. 447-452
[9] Rajesh Rajamani, and J. Karl Hedrick. (1995), “Adaptive Observer for Active
Automotive Suspension: Theory and Experiment” IEEE Transactions on Control System
Technology, Vol. 3, No 1 March
[10] Christopher Edwards and Sarah K. Spurgeon. (1998), “Sliding Mode Control:
Theory and Applications”, London: Taylor & Francis Group Ltd.
[11] Vadim Utkin, Jurgen Guldner, Jingxin Shi. (1999), “Sliding Mode Control in
Electromechanical Systems”, Taylor & Francis Group Ltd.
[12] H.D. Taghirad, E. Esmailzadeh. (1995), “ Passenger Ride Comfort Through
Observer Based Control” ASME Conference on Mechanical Vibaration and Noise
[13] Fan Yu, Wei Ping Sha, S. El-Demerdash, “ Estimation Accuracy and Robustness
Analysis of a State Observer for an Active Vehicle Suspension”
























![jak-stik.ac.idjak-stik.ac.id/staff/desy/files/penelitian-dan-penulisan[9].pdfdengan Visual Basic 6.0. Di Internet mernang banyak sekali situs-situs yang ... SQL Editor, Kontrol Flex](https://img.pdfslide.us/doc/110x75/5c7ace5709d3f264308b6bfb/jak-stikacidjak-stikacidstaffdesyfilespenelitian-dan-penulisan9pdfdengan.jpg)




