Embed Size (px)
Citation preview

The Allocation of Future Business Isaiah Andrews and Dan Barron

The Allocation of Future Business: Dynamic RelationalContracts with Multiple Agents
By Isaiah Andrews and Daniel Barron∗
We consider how a firm dynamically allocates business amongseveral suppliers to motivate them in a relational contract. Thefirm chooses one supplier who exerts private effort. Output isnon-contractible, and each supplier observes only his own rela-tionship with the principal. In this setting, allocation decisionsconstrain the transfers that can be promised to suppliers in equi-librium. Consequently, optimal allocation decisions condition onpayoff-irrelevant past performance to make strong incentives cred-ible. We construct a dynamic allocation rule that attains first-bestwhenever any allocation rule does. This allocation rule performsstrictly better than any rule that depends only on payoff-relevantinformation.JEL: C73, D82, L14, L22
Many firms rely on relational contracts to motivate their suppliers. For ex-ample, informal promises are an essential feature of the supply chains used byToyota, Honda, Chrysler, and firms with “just-in-time” suppliers. In these rela-tional contracts, firms promise monetary compensation to reward or punish theirsuppliers. They also promise to allocate business among suppliers to strengthentheir relationships (Dyer, 1996; Krause, Scannell and Calantone, 2000; Liker andChoi, 2004). The firm cannot formally commit to these promises; instead, theyare made credible by the understanding that if the firm betrays a supplier, theirrelationship sours and surplus is lost.
This paper explores how a principal (downstream firm) can dynamically allocatebusiness among her agents (suppliers) to overcome this commitment problem. Inour framework, the principal repeatedly interacts with a group of agents whoseproductivities vary over time. The principal allocates production to a single
∗ Andrews: Harvard Society of Fellows, Harvard Department of Economics, Littauer Center 124,Cambridge, MA 02138 (email: [email protected]). Barron: Northwestern University Kel-logg School of Management, Leverone Hall 631, 2001 Sheridan Road, Evanston, IL 60208 (email: [email protected]). We are tremendously indebted to Bob Gibbons, Juuso Toikka, andGlenn Ellison for advice, insight, and support. Special thanks to Simon Board, Alessandro Bonatti,Gabriel Carroll, Sebastian Di Tella, Sambuddha Ghosh, Marina Halac, Anton Kolotilin, Ruitian Lang,Greg Leiserson, Hongyi Li, James Malcomson, Mike Powell, Luis Rayo, Larry Samuelson, Eric Vanden Steen, Sarah Venables, Xiao Yu Wang, Joel Watson, Nils Wernerfelt, Birger Wernerfelt, Alexan-der Wolitzky, and Luis Zermeno. Thanks to participants in seminars at MIT, LSE, Harvard BusinessSchool, Rochester, Northwestern, UCSD, Washington University St Louis, Notre Dame, Boston Univer-sity, Yale, and Columbia. Andrews gratefully acknowledges NSF Graduate Research Fellowship supportunder Grant No. 1122374. Barron gratefully acknowledges support from the Cowles Foundation at YaleUniversity while writing this paper. Remaining errors are our own. The authors declare that they haveno relevant or material financial interests that relate to the research described in this paper.
1

2 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
agent in each period. The chosen agent exerts a binary effort that determines theprobability that the principal earns a profit. The parties have deep pockets, sothe chosen agent could in principle be motivated using large bonuses and fines.Output is not contractible, however, so players must have the incentive to followthrough on these payments. Compounding this commitment problem, agents donot observe the details of one anothers’ relationships with the principal, and soare unable to jointly punish the principal if she reneges on one of them.
We show that allocation decisions make payments credible and so play a centralrole in optimal relational contracts. The principal motivates an agent by promis-ing him bonuses and high future payments following success and demanding finesand low future payments following failure. If the principal or an agent reneges onthese promises, that player is punished with the breakdown of the correspondingbilateral relationship. Consequently, an agent’s payoff is bounded from belowby his outside option—he would renege on any payments that gave him a lowerpayoff. His payoff is bounded from above by the total surplus he produces in thefuture—the principal would renege on any payment that resulted in a higher pay-off. Importantly, this upper bound depends on the principal’s future allocationdecisions.
The principal would like to promise a large payoff to an agent who performs well,so the upper bound on an agent’s payoff binds when he produces high output.To relax this binding constraint, an optimal relational contract allocates moreproduction to an agent after he performs well. We construct a dynamic allocationrule—the Favored Supplier Allocation (FSA)—that does this, and prove thatit attains first-best whenever any allocation rule does if the set of feasible agentproductivities is not too dispersed. To attain first-best, the FSA must allocateproduction to one of the most productive agents in each period. Among thoseagents, the FSA chooses the one who has produced high output most recently.Therefore, this allocation rule depends both on an agent’s current productivityand on his (payoff-irrelevant) past performance. We show that conditioning onpast performance is important: the FSA attains first-best for a strictly widerrange of discount factors than any allocation rule that depends only on currentproductivities.
The FSA favors past success in that an agent is allocated production morefrequently following good performance. It also tolerates past failures: the mostrecent high performer is allocated business, regardless of how many times he hasfailed since his last success. The probability that an agent is chosen decreases onlyif another agent has higher productivity, is allocated production, and performswell.
These properties of the FSA reflect how payments and allocation decisionsinteract in a relational contract. We can construct transfers so that the principalis indifferent between allocation decisions and so is willing to implement anyallocation rule, including the FSA. An optimal allocation rule is therefore onlyconstrained by the need to give each agent strong incentives that are credible in

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 3
equilibrium. The FSA tolerates past failure because an agent can be punished bylow transfers following low output, regardless of the allocation rule. In particular,an agent might be “favored” by the FSA but nevertheless earn a low payoff.In contrast, an agent’s maximum payoff following high output is constrained byfuture allocation decisions; the FSA favors past successes to relax this constraintwhen it binds.
In many real-world supply chains, a supplier’s past performance plays a pivotalrole in whether it is allocated production. Asanuma (1989) documents that inthe 1980s, Toyota preferentially allocated business to firms that performed wellin the past. Farlow et al. (1996) note that Sun Microsystems uses a similar sys-tem, and Krause, Scannell and Calantone (2000) survey manufacturing firms andconclude that many of them allocate business based on past performance. Theserelationships are also shaped by the possibility of supplier failure. Consistent withour intuition that the FSA “tolerates past failures,” Liker and Choi (2004) arguethat companies like Honda do not immediately withdraw business following poorperformance. Instead, they impose costs on the supplier—intense scrutiny, extrashifts, and expedited delivery—while maintaining the relationship. “Metalcraft,”the pseudonymous company studied by Kulp and Narayanan (2004), is similarlyhesitant to pull business from a supplier who performs poorly.
The extensive case-study literature on allocation decisions in supply chains hasspurred a limited theoretical literature. Board (2011) is among the first to for-mally model allocation dynamics. He argues that dynamics can arise in a repeatedhold-up problem if suppliers are liquidity constrained. In contrast, our model con-siders a fundamentally different contracting friction: limited commitment by theprincipal (due to moral hazard with non-contractible output), rather than liq-uidity constraints. Section III has a detailed comparison. Other contributionsinclude Taylor and Wiggins (1997), who compare competitive and relational sup-ply chains but do not consider dynamics, and Li, Zhang and Fine (2011), whofocus on formal cost-plus contracts.
This paper is part of the growing literature on relational contracting spurredby Bull (1987), MacLeod and Malcomson (1989), and Levin (2003). Malcomson(2012) has an extensive survey. Levin (2002) is among the first to consider re-lational contracts with multiple agents. Calzolari and Spagnolo (2010) analyzehow the number of bidders in a procurement auction affects relational incentives,but do not consider allocation dynamics. In related research, Barron and Powell(2015) expand the tools developed here to consider inefficient policies in relationalcontracts.
Our model has private monitoring because each agent observes only his ownrelationship with the principal; Segal (1999) makes a similar assumption in hisstatic analysis of formal contracts. This assumption implies that agents cannotjointly punish the principal and so plays an essential role in our dynamics. Gameswith private monitoring are difficult to analyze because players condition theiractions on different variables (see Kandori (2002) for an overview). Nevertheless, a

4 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
number of applied papers have investigated settings with private monitoring (e.g.Fuchs (2007), Harrington and Skrzypacz (2011), Ali and Miller (2013), Wolitzky(2013)). In principle, optimal equilibria in our game could be non-recursive andhence very complicated. However, we prove that a relatively simple, recursiveallocation rule—the FSA—attains first-best whenever any equilibrium does. Toprove this result, we develop tools to handle the complexities of private monitoringin our setting.
I. Model and Assumptions
A. Timing
Consider a repeated game with N + 1 players denoted {0, 1, ..., N}. Player 0is the principal (“she”), while players i ∈ {1, ..., N} are agents (“he”). In eachperiod the principal requires a single good that can be supplied by any one ofthe agents. Each agent’s productivity is drawn from a finite set and publiclyobserved. After observing productivities, the principal allocates production toone agent, who either accepts or rejects. If he accepts, that agent exerts binaryeffort that determines the probability of high output, the value of which dependson his productivity. Utility is transferable between the principal and each agent.At the beginning of the game, the principal and each agent can “settle up” bytransferring money to one another. Payments are observed only by the two partiesinvolved.Formally, we consider the infinite repetition t = 1, 2, ... of the following stage
game with common discount factor δ:
1) Productivities vt = (v1,t, ..., vN,t) for agents i ∈ {1, ..., N} are publicly drawnfrom distribution F (v), with each vi,t ∈ {0, v1, ...., vK} ⊂ R+ for K < ∞.
2) The principal publicly chooses agent xt ∈ {1, ..., N} as the supplier.
3) The principal pays each agent i∈ {1, ..., N}, who simultaneously pays theprincipal. Define wi,t ∈ R as the resulting net up-front payment to agent i.Only the principal and agent i observe wi,t.
4) Agent xt rejects or accepts production, dt ∈ {0, 1}. dt is observed only bythe principal and xt. If dt = 0, then et = yt = 0.
5) If dt = 1, agent xt privately chooses effort et ∈ {0, 1} at cost cet, c > 0.
6) Output yt ∈ {0, vxt,t} is realized and observed only by agent xt and theprincipal. Pr{yt = vxt,t|et} = pet with 1 ≥ p1 > p0 ≥ 0.
7) The principal pays each agent i ∈ {1, ..., N}, who simultaneously pays theprincipal. Define τi,t ∈ R as the resulting net bonus to agent i. Only theprincipal and agent i observe τi,t.

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 5
Let 1i,t be the indicator function for the event that agent i is allocated production,1i,t = 1{xt = i}. Then stage-game payoffs in period t are
ut0 = yt −∑N
i=1(wi,t + τi,t)uti = wi,t + τi,t − 1i,tcet
for the principal and agent i ∈ {1, ..., N}, respectively.1Two features of this model warrant further discussion. First, each agent ob-
serves only his own output and pay and cannot communicate with other agents.2
As a result, the principal can renege on one agent without facing punishmentfrom the other agents. This assumption drives equilibrium dynamics. We exploreit further and compare our results to a game with public monitoring in SectionIII. Second, the principal pays wi,t before the chosen agent accepts or rejectsproduction. This assumption simplifies punishment payoffs by ensuring that anagent can punish the principal if he receives an out-of-equilibrium up-front pay-ment. Adding a further round of transfers after the agent accepts production butbefore he exerts effort would not change any of our results.
B. Histories, Strategies, and Continuation Payoffs
The set of histories at the start of period T isHT0 = {vt, xt, {wi,t}, dt, et, yt, {τi,t}}T−1
t=1 .Define A as the set of all variables observed in a period, and for a ∈ A de-fine HT
a as the set of histories immediately following the realization of a. Forexample, (hT0 ,vT , xT , {wi,T }i, dT , eT , yT ) ∈ HT
y . The set of histories is H =⋃∞T=1
⋃a∈A∪{0}HT
a .
For each agent i ∈ {1, ..., N}, let Ii : H → 2H be agent i’s information partitionover histories. That is, Ii(h
ta) equals the set of histories that agent i cannot
distinguish from hta ∈ Hta.
3 A strategy is a mapping from each player’s beliefs ateach history to feasible actions at that history, and is denoted σ = (σ0, ...., σN ) ∈Σ = Σ0 × ...× ΣN .
DEFINITION 1: For i ∈ {0, ...., N}, player i’s continuation surplus equals Ui,t =∑∞t′=0(1− δ)δt
′ut+t′i . Define i-dyad surplus as the total surplus produced by agent
i:
Si,t =∞∑
t′=0
(1− δ)δt′1i,t+t′(yt+t′ − cet+t′).
Intuitively, i-dyad surplus is agent i’s contribution to total surplus—the sur-plus from those periods in which agent i is allocated production. We will show
1Requiring wi,t = τi,t = 0 for all i �= xt would not change any of our results, though it would alterour discussion of transfers in Section III.
2If agents could directly pay one another, then they could use these payments to communicate. Inthat case, optimal allocation rules would typically be history-independent (see Andrews and Barron(2013) for a proof).
3For example, ∀i ∈ {1, ..., N}, Ii(hT0 ) = {vt, xt, wi,t, 1i,tdt, 1i,tet, 1i,tyt, τi,t}T−1
t=1 .

6 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
that dyad surplus constrains the incentives that can be promised to agent i, andso plays a critical role in our analysis. Note that an agent’s beliefs about hiscontinuation surplus condition on his information, rather than the true history:Eσ
[Ui,t|Ii
(ht)].
A relational contract is a Perfect Bayesian Equilibrium (PBE) of this game, withequilibrium set Σ∗.4 We focus on optimal relational contracts, which maximize ex-ante total surplus among all relational contracts: maxσ∗∈Σ∗
∑Ni=0Eσ∗ [Ui,1]. This
is equivalent to maximizing the principal’s surplus because utility is transferablebetween the principal and each agent.5 An allocation rule is a mapping fromthe histories immediately following the realization of {vi,t}Ni=1, ∪∞
t=1Htv, to the
agent xt who is allocated production at that history. Without loss of generality,we restrict attention to the set of relational contracts in which players do notcondition on past effort choices.6
Let vmax,t = maxj vj,t be the maximum productivity in period t, and define theset of most productive agents as Mt = {i|vi,t = vmax,t}. A first-best relationalcontract is a relational contract that (i) always allocates production to an agent inMt, who (ii) chooses et = 1. Define the resulting first-best total surplus V FB =E[vmax,tp1 − c]. Without loss of generality, assume v1 < v2 < ... < vK . Wemaintain the following three assumptions for the entire analysis.
ASSUMPTION 1: F is exchangeable: for any permutation φ, F (v) = F (φ(v)).
ASSUMPTION 2: If vi,t > 0 then vi,tp1 − c > vi,tp0, with Pr{vmax,t > 0} = 1.
ASSUMPTION 3: Pr{|Mt| > 1} > 0 and Pr{|Mt| = 1} > 0.
Assumption 1 implies that agents are symmetric, greatly simplifying our anal-ysis. By Assumption 2, et = 1 is efficient in each period unless vxt,t = 0, and it isalways efficient for an agent in Mt to exert effort. Assumption 3 has two impli-cations that warrant further discussion: (i) multiple agents sometimes have thesame productivity in one period, and (ii) each agent is the unique most productiveagent with positive probability.Consider implication (i). To attain first-best, an equilibrium must allocate pro-
duction in each period to one of the most productive agents in that period (i.e.one of the agents in Mt). If Mt is always a singleton, then the first-best allo-cation rule is uniquely determined by exogenous productivity draws. Thus, tiesare required for non-trivial allocation dynamics to arise in a first-best relational
4Adapted from Mailath and Samuelson (2006): a Perfect Bayesian Equilibrium is an assessment(σ∗, μ∗) consisting of strategy profile σ∗ and beliefs about the true history μ∗ = {μ∗
i }Ni=0. σ∗i is a best
response given μ∗i , which is updated by Bayes Rule whenever possible. Otherwise, μ∗
i assigns positive
weight only to histories that are consistent with Ii(ht
).
5Proof: for σ∗ ∈ Σ∗, agent i pays Eσ∗ [Ui,1] to the principal at the start of the game, or else ispunished with dt = 0 and wi,t = τi,t = 0 ∀t ≥ 1. The principal’s payoff then equals ex-ante total surplus∑N
i=0 Eσ∗ [Ui,1].6The proof that this is without loss may be found in Andrews and Barron (2013).

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 7
contract. We discuss to what extent our intuition applies in settings without tiesin Section III.The assumption that productivities are sometimes tied seems reasonable in
real-world supply chains. For example, in their study of “Metalcraft,” Kulp andNarayanan (2004) highlight an allocation decision in which at least three suppliershave “comparable” productivities. Two suppliers have similar costs and qualities,while the third has higher cost but higher quality. The case emphasizes that “thecosts associated with managing upstream suppliers [are] hard to quantify objec-tively,” implying that it is difficult to strictly rank suppliers. More generally, asupplier’s “productivity” includes many components—manufacturing costs, qual-ity, and expertise—that are either difficult to measure or naturally discrete (seeLalond and Pohlen (1996) for further discussion). Hence, a firm might naturallyview several of its suppliers as equally efficient when it allocates production.Implication (ii) of Assumption 3 is also crucial for equilibrium dynamics, since
otherwise the principal could attain first-best by allocating business among astrict subset of agents. In practice, the relative productivities of different suppli-ers vary over time with changes in the downstream firm’s needs and suppliers’capabilities. For example, Metalcraft sometimes chooses “non-preferred” suppli-ers because preferred suppliers are unable to efficiently manufacture a given part.Similarly, Toyota asks several suppliers to submit proposals for a component, thenchooses one based on the quality of its proposal (vi,t) and its past performance. Asupplier chosen in one model-cycle might be less productive than other suppliersin the next. As a result, Toyota’s suppliers have product portfolios that varysubstantially over time (Asanuma, 1989).
II. The Favored Supplier Allocation
This section gives conditions under which a simple dynamic allocation rule—theFavored Supplier Allocation—is part of a first-best relational contract wheneverany relational contract attains first-best. The definition of the Favored SupplierAllocation, statement of the result, and intuition are given in Section II.A, witha formal proof in Section II.B. Section II.C explores the incentives of the FavoredSupplier Allocation in more detail. We focus on strategies yielding first-best totalsurplus, so our discussion assumes et = 1 in each period unless otherwise noted.
A. Statement of the Main Result
Suppose the principal could commit to a transfer scheme as a function of output.Then regardless of future allocation decisions, the principal could write a short-term formal contract to hold an agent’s payoff at 0 and motivate him to workhard.7 As a result, an allocation rule that depends only on current productivitiesand ignores past performance would be optimal.
7For instance, the principal could set wxt,t = c− p1c
p1−p0, pay a bonus of c
p1−p0if yt = vxt,t, and
pay no bonus if yt = 0.

8 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
In contrast, allocation dynamics play an important role in the game withoutcommitment. Our main result concerns what we call the Favored Supplier Allo-cation, which allocates production among agents according to a simple history-dependent rule.
DEFINITION 2: For each t ≥ 1, history ht0, and agent i, define Ti(ht0) =
max{t′ < t|xt′ = i, yt′ > 0} as the most recent time agent i produced high out-put. The Favored Supplier Allocation (FSA) allocates production in each pe-riod to the efficient agent who has most recently produced high output: xt ∈argmaxi∈Mt Ti(h
t0). If Ti(h
t0) = −∞ for all agents in Mt, then xt ∈ Mt is
chosen at random.
The Favored Supplier Allocation chooses the agent who has produced highoutput most recently among those agents in Mt. If no agent in Mt has producedhigh output, then the supplier is chosen at random from that set. This allocationrule favors past successes by choosing agents who have performed well over thosewho have not, and choosing more recent high performers over those who performedwell in the distant past. It tolerates past failures by not tracking past low output:the most recent high performer is chosen regardless of his performance in otherperiods.
Consider a first-best relational contract that uses the Favored Supplier Allo-cation. Because et = 1 in each period of this relational contract, an agent’sdyad-surplus at the start of a period depends only on the number of agents whohave produced high output more recently than him. Define SFSA
(j) as the expected
dyad-surplus of the jth most recently productive agent—that is, an agent forwhom (j − 1) other agents have have produced high output more recently. DefineF k(j) as the probability that both vmax,t = vk and the j − 1 most recently produc-
tive agents are unable to produce at time t, F(j) =∑K
k=1 Fk(j), and F(N+1) = 0.
Then it is straightforward to show that
SFSA(j) =
(1− F(j)
)δSFSA
(j) +∑N
k=1
(F k(j) − F k
(j+1)
)(1− δ)(vkp1 − c)+(
F(j) − F(j+1)
)δ(p1S
FSA(1) + (1− p1)S
FSA(j)
)+ F(j+1)δ
(p1S
FSA(j+1) + (1− p1)S
FSA(j)
).
There is one such equation for each j = {1, ..., N}, leading to a linear system of
N equations in the N unknowns(SFSA(1) , ..., SFSA
(N)
). Details for how to solve this
system may be found online in the technical appendix.
Our main result finds the lowest discount factor such that a relational contractusing the FSA attains first-best. If a further parameter condition is satisfied,then no relational contract attains first-best for smaller discount factors, so theFavored Supplier Allocation attains first-best whenever any allocation rule does.

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 9
PROPOSITION 1: Let δFSA ∈ (0, 1) be the smallest δ such that δ1−δS
FSA(1) ≥
cp1−p0
.8 Then:
1) The FSA is part of a relational contract that attains first-best iff δ ≥ δFSA.
2) If δFSAvK−v1 ≤ (1−δFSA)c p0/p1p1−p0
, then no relational contract attains first-
best if δ < δFSA. So a relational contract using the FSA attains first-bestwhenever any relational contract does.
PROOF: See Section II.B. �The threshold δFSA solves δFSA
1−δFSASFSA(1) = c
p1−p0. A unique solution always
exists because δ1−δS
FSA(1) is continuous and strictly increasing in δ ∈ (0, 1), tends
to infinity as δ tends to one, and tends to zero as δ tends to zero. Note that theparameter constraint in part 2 of the proposition is always satisfied if K = 1,
since in this case vK = v1 and so δFSAvK − v1 < 0 < (1− δFSA)c p0/p1p1−p0
.We focus on developing intuition for Proposition 1 here, deferring the proof to
the next subsection. First, we consider how future allocation decisions constrainan agent’s equilibrium incentives. As in Levin (2003) an agent’s payoff afterhe produces output is constrained by his expected future production. Agent i’spayoff can be no worse than his outside option, 0, since he can always deviate byrejecting future production. Agent i cannot earn more than his expected i-dyadsurplus, since the principal would renege on any larger payoff, forfeit that agent’sfuture output, and continue trading with the other agents. Private monitoringleads to this upper bound: following a deviation observed only by agent i, theprincipal stands to lose only the future surplus produced by that agent. Therefore,the upper bound on an agent’s reward for high output—and hence his incentiveto work hard—depends on his expected dyad surplus following that output.We show that these payoff bounds are the key constraints imposed by the
relational contract. In particular, for any allocation rule, we can construct arelational contract in which (i) an agent earns the lower or upper bounds afterproducing low or high output, respectively, and (ii) the principal earns payoff 0at the start of each period and so is willing to implement the allocation rule.Next, we consider optimal allocation dynamics. In any first-best relational
contract the principal chooses exactly one agent in Mt in each period t. Considera period-t history such that agents 1 and 2 are both in Mt and last producedhigh output in periods T1 and T2, respectively. Assume agent 1 has producedhigh output more recently: T1 > T2. As argued above, agent i can be providedstronger incentives to work hard in period Ti if his expected dyad surplus followinghigh output in that period is large. This i-dyad surplus is larger if the principalallocates business to him in period t, but how much it increases depends on twofactors.
8Note that 11−δ
SFSA(1)
is strictly increasing in δ.

10 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
First, agent i’s dyad surplus increases more if t − Ti is small since, from theperspective of period Ti, surplus in period t is discounted by δt−Ti . Agent i’sexpected dyad surplus also increases more if agent i believes that the period-t history in question is probable, given his information in period Ti. If thisprobability is larger for agent 1, then choosing agent 1 increases expected 1-dyadsurplus in T1 more than choosing agent 2 would increase expected 2-dyad surplusin T2. In that case, an optimal allocation rule should choose the agent in Mt whoproduced high output most recently, which is exactly what the FSA does.9
However, the informal logic outlined above is incomplete. In particular, agent 1in period T1 might assign a lower probability to a given period-t history than agent2 in T2. Agents have different beliefs about the true history because they observedifferent variables. For example, agent 2 might believe a history in period t isprobable given his information in T2, while agent 1 already knew this same historywas impossible when he was chosen in period T1. As a result of this difficulty, wedo not prove Proposition 1 by formalizing the above argument, but instead derivea condition that must be satisfied by any relational contract which attains first-best. This necessary condition is implied by (but weaker than) the combinationof two constraints. First, the principal and each agent must be willing to paytheir equilibrium transfers. Second, given these transfers, each agent’s incentiveconstraint to exert high effort must hold at every on-path history. Crucially, thenecessary condition we derive depends only on agents’ beliefs at the beginning ofthe game and so avoids the complications that arise from differences in beliefs.Under the parameter restriction in part 2 of Proposition 1, we show that relationalcontracts satisfying this necessary condition exist only if δ ≥ δFSA, which provesthat the FSA attains first-best whenever any relational contract does.
B. Proof of Proposition 1
Let σFSA be a strategy profile that uses the Favored Supplier Allocation. De-pendence on strategies σ is suppressed wherever possible without loss of clarity.Our proof consists of four lemmas. Lemma 1 gives necessary and sufficient condi-tions for an allocation rule and effort choices to be part of a relational contract.Lemma 2 then establishes a necessary condition for strategies to be part of afirst-best relational contract. Under a parameter condition, Lemma 3 shows thatthis necessary condition holds for any first-best strategy profile σ only if it holdsfor σFSA. Finally, Lemma 4 shows that the necessary condition established byLemma 2 holds only if a first-best relational contract using the FSA exists. Hencewe establish that, under a parameter condition, no relational contract may attainfirst-best unless one that uses the FSA does so.The first step of the proof is to identify necessary and sufficient conditions for
an allocation rule and sequence of effort choices to be part of a relational contract.
9We thank an anonymous referee for suggesting an intuition along these lines.

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 11
LEMMA 1: 1) Let σ∗ be a PBE in which et = 0 whenever vxt,t = 0. Then
(1) (1− δ) cp1−p0
≤ δEσ∗[Sxt,t+1 | Ixt
(hty)]
,
∀ on-path hty ∈ Hty such that et = 1, yt > 0.
2) Let strategy σ be such that et = 0 if vxt,t = 0, total surplus equals V , and(1) holds. There exists a relational contract σ∗ such that (i) total surplus
equals V , and (ii) the joint distribution over {vt, xt, yt}Tt=1 is identical tothat implied by σ for all T ≥ 1.
PROOF: See online appendix.�Constraint (1) requires that a chosen agent xt expect at least S = 1−δ
δc
p1−p0dyad
surplus whenever he exerts effort (et = 1) and produces high output (yt > 0). Theright-hand side of this constraint equals the largest payoff an agent can receivefollowing high output. Since the lowest payoff an agent can receive following lowoutput equals 0, (1) is a necessary condition for agent xt’s incentive constraintfor high effort to hold.Lemma 1 implies that (i) each agent’s equilibrium incentives can be summarized
by his dyad surplus following high effort and high output, and (ii) we can inducethe principal to follow any allocation rule in equilibrium. To prove this lemma, weconstruct transfers so that each agent i earns E
[Si,t|ht0
]continuation surplus at
the start of each period. Then the principal earns 0 and so is willing to follow theequilibrium allocation rule. Agent xt is willing to pay his expected continuationsurplus as a fine following low output because he would lose that surplus followinga deviation. So agent xt earns δE[Sxt,t+1|Ixt(h
ty)] if yt > 0 and 0 if yt = 0, which
can be plugged into his effort incentive constraint to yield (1). This constructionensures that the principal is willing to pay the equilibrium wxt,t to the agent whois allocated production in each period, while that agent is willing to pay a fine ifhis output is low.Ceteris paribus, an allocation rule and efforts that satisfy (1) at δ also satisfy
(1) for δ′ > δ. Hence, Lemma 1 implies part 1 of Proposition 1.Condition (1) depends on agent beliefs and so is challenging to check for an
arbitrary strategy profile. We handle this complication by finding necessary con-ditions for (1) to be satisfied at each history, which is required in any first-bestrelational contract. To satisfy (1), an allocation rule must ensure that each agentexpects at least δS dyad-suplus whenever that agent produces high output.Let H
(ht)= {i : there exists s < t such that xs = i, ys > 0} denote the set
of agents who have produced high output before period t. For any first-beststrategy σ, define βL
i,s = Prσ{xt = i, i /∈ H(ht)
}as the probability that agent
i is allocated production and has never produced high output in the past, andβHi,s (k) = Prσ
{vmax,t = vk, xt = i, i ∈ H(ht)
}as the probability that vmax,t = vk,
agent i is allocated production, and i has produced high output in the past. LetV FBk = vkp1 − c.

12 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
DEFINITION 3: For any first-best strategy σ, define the expected obligationowed to agent i at time t, Ωi,t, as Ωi,0 = 0 and
(2) Ωi,t ≡ βLi,tp1δS − (1− δ)
K∑k=1
βHi,t (k)V
FBk +
Ωi,t−1
δ.
For each t ≥ 1, one can show that Eσ[Si,t] ≥ Ωi,t in any first-best relationalcontract, where the expectation is taken with respect to beliefs at the start ofthe game. The first term in Ωi,t is a lower bound on the additional expectedi-dyad surplus in equilibrium based on agent i’s output in period t: he produceshigh output for the first time in that period with probability βL
i,tp1, in which case
he must produce δS expected dyad surplus in the continuation game by (1). Insubsequent periods, agent i produces some of this dyad surplus whenever he ischosen as the supplier. The second term captures this fact: the probability thatagent i has both previously produced high output and is allocated production inperiod t with vmax,t = vk is βH
i,t(k), and in this case i produces (1−δ)V FBk surplus.
The final term,Ωi,t−1
δ , captures any expected dyad surplus from previous periodsthat agent i has not yet supplied.
If Ωi,t diverges to ∞, then (1) does not hold in expectation across histories andso must be violated at some history on the equilibrium path. Thus, Ωi,t must bebounded from above in any first-best relational contract.
LEMMA 2: In any first-best relational contract σ, lim supt→∞Ωi,t < ∞ for alli ∈ {1, ..., N}.
PROOF: Let bLi(ht)= 1 {xt = i} 1{i �∈ H
(ht)}
indicate the event that i is allo-cated production in period t and has never previously produced high output. De-fine 1i,t (k) = 1
{xt = i, vmax,t = vk
}, and let bHi
(ht, k
)= 1i,t (k) 1
{i ∈ H
(ht)}
indicate the event that i is allocated production in period t, has previously pro-duced high output, and the maximal productivity is vk.
In a first-best relational contract, (1) must hold the first time an agent producesyt > 0. Multiplying both sides of (1) by bLi
(ht)1 {yt > 0} δt, summing across
s = 1, ..., t, and taking expectations in t = 0 yields(3)t∑
s=1
δsβLi,sp1δS ≤ Eσ
[t∑
s=1
∞∑s′=1
K∑k=1
(1− δ)δs+s′bLi (hs) 1 {ys > 0} bHi(hs+s′ , k
)V FBk
].
We can isolate expectations that depend on events in periods s > t by rewritingthe right-hand side
(4) R(i, t) + Eσ
[t∑
s=1
1 {i ∈ H (hs)}K∑k=1
(1− δ)δsbHi (hs, k)V FBk
],

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 13
where R(i, t) = (1− δ)Eσ
[1{i ∈ H
(ht+1
)}∑∞s=t+1
∑Kk=1 δ
sV FBk bHi (hs, k)
].
Since Eσ
[bHi (hs, k) 1 {i ∈ H (hs)}] = βH
i,s (k), we can re-arrange (3) to obtain
Ωi,t ≤ δ−tR(i, t). But δ−tR(i, t) ≤ δV FBK , so lim supt→∞Ωi,t ≤ δV FB
K in anyfirst-best relational contract.�The FSA treats agents symmetrically ex-ante, so its implied obligation is sym-
metric as well, ΩFSAi,t = ΩFSA
t . We next show that if ΩFSAt diverges, then under
a parameter restriction obligation must diverge for any first-best strategy.
LEMMA 3: Suppose δV FBK ≤ V FB
1 + p1δS. If lim supt→∞ΩFSAt = ∞, then for
any first-best strategy σ, ∃i ∈ {1, ..., N} such that limt→∞Ωi,t = ∞.
PROOF: Given any strategy σ, define a symmetric strategy profile by randomizingagent identities in t = 1 and then playing as in σ. Obligation diverges in thesymmetric strategy profile only if it diverges for at least one agent in σ. So wecan restrict attention to symmetric strategy profiles.Given a symmetric first-best strategy σ with obligation Ωt, Lemma A.2 proves
that ΩFSAt ≤ Ωt for all t if δV
FBK ≤ V FB
1 +p1δS. The proof constructs a decreasing
sequence of obligations Ωnt such that Ω0
t = Ωt and limn→∞Ωnt = ΩFSA
t . We usethe restriction δV FB
K ≤ V FB1 + p1δS to prove that obligation is minimized by
an allocation rule that chooses agents who have already produced high outputwhenever at least one such agent is in Mt. Then ΩFSA
t ≤ Ωt for any symmetricσ, implying Lemma 3.�Lemma 3 shows that, under a parameter condition, divergent FSA obligation
implies divergent obligation for all first-best strategies. Thus, Lemmas 2 and3 together imply that first-best is attainable only if ΩFSA
t is bounded above ast → ∞. The final step of our proof shows that ΩFSA
t diverges exactly whenthe Favored Supplier Allocation is not part of a relational contract that attainsfirst-best.
LEMMA 4: If δ < δFSA, then lim supt→∞ΩFSAt = ∞.
PROOF: We need only show that lim supt→∞ΩFSAt = ∞ if SFSA
(1) < S, since this
condition is equivalent to δ < δFSA. Using the definition of SFSA(1) and repeating
the derivation of (3)-(4) with SFSA(1) in place of S yields
(5)t∑
s=1
δsβL,FSAs p1δS
FSA(1) −
t∑s=1
δsK∑k=1
βH,FSAs (k)V FB
k = RFSA (t)
where βL,FSAs , βH,FSA
s (k), and RFSA(t) are the analogues for βLi,s, β
Hi,s, and R(i, t)
if σ = σFSA, where we drop the i index because the FSA is symmetric.The argument in Lemma 2 implies that 0 ≤ δ−tRFSA(t) ≤ δV FB
K for all t.
The left-hand side of (5) equals δtΩFSAt if S = SFSA
(1) . It follows that ΩFSAt is

14 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
asymptotically bounded for S = SFSA(1) , from which it is straightforward to see
that it diverges for S > SFSA(1) . �
Finally, we relax the condition δV FBK ≤ V FB
1 + p1δS from Lemma 3. If thiscondition holds at δFSA, then it holds a fortiori for δ < δFSA. So Lemmas 2-4imply that no relational contract attains first-best for δ < δFSA. The parameter
constraint at δFSA may be written δFSAvK − v1 ≤ (1− δFSA)c p0/p1p1−p0
.�
C. Implications of Proposition 1
This section presents two corollaries of Proposition 1 that explore the incentivesprovided by the Favored Supplier Allocation. The first proves that the FSAperforms strictly better than a natural benchmark: an allocation rule that doesnot condition on past performance. The second considers the role of informationin the FSA.A relational contract is stationary if on the equilibrium path, actions in one
period are independent of previous periods and of t. Corollary 1 proves that arelational contract using the Favored Supplier Allocation attains first-best for astrictly wider parameter range than any stationary relational contract.
COROLLARY 1: Let δStat ∈ (0, 1) satisfy 1−δStat
δStatc
p1−p0= 1
N V FB. Then (i) a
stationary relational contract attains first-best if and only if δ ≥ δStat, and (ii)δStat > δFSA.
PROOF: See online appendix. �A stationary allocation rule does not respond to past performance to make large
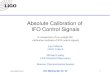
rewards to high performers credible, and so cannot perform as well as a relationalcontract that uses the FSA. To illustrate this point, Figure 1 shows how δFSA andδStat change with the parameters p1 and Pr {|Mt| = 2} in a two-agent example,holding the other parameters constant.Finally, we consider the role of information in the Favored Supplier Allocation.
The constraint (1) must hold only with respect to agent xt’s information, Ixt(hty).
In particular, the allocation rule might satisfy (1) but “conceal information” bysetting δE[Sxt,t+1|hty] < (1 − δ) c
p1−p0for some hty, so that agent xt would be
unwilling to exert effort if he learned the true history. The Favored SupplierAllocation does not conceal information in this way.
COROLLARY 2: In any first-best relational contract σFSA that uses the FavoredSupplier Allocation, (1) holds with respect to the true history:
(6) (1− δ) cp1−p0
≤ δEσFSA
[Sxt,t+1 | hty
],
∀ on-path hty ∈ Hty such that et = 1, yt > 0.
PROOF: EσFSA
[Sxt,t+1|hty
]= SFSA
(1) if yt > 0, so (6) holds for δ ≥ δFSA. �

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 15
Pr{v1,t
=v2,t
=10}
δVarying Pr{v1,t=v2,t=10}, holding p1=0.9
A
B
C
0 0.2 0.4 0.6 0.8 10.55
0.6
0.65
0.7
0.75
0.8
0.85
p1
δ
Varying p1, holding Pr{v1,t=v2,t=10}=0.8
A
BC
0.7 0.75 0.8 0.85 0.9 0.95 10.55
0.6
0.65
0.7
0.75
0.8
0.85
Figure 1. Comparing δFSAand δStat
. Both panels assume N = 2, p0 = 0, c = 5, K = 1, and
v1 = 10. The left panel holds p1 = 0.9 and varies δ and Pr {v1,t = v2,t = 10} = Pr {|Mt| = 2}.The right panel holds Pr {|Mt| = 2} = 0.8 and varies δ and p1. In region A, both stationary
and non-stationary relational contracts can attain first-best. In region B, no stationary
relational contract attains first-best, but one that uses the FSA does. In region C no
first-best relational contract exists.
It can be shown that (6) is a necessary and sufficient condition (in the sense ofLemma 1) for an allocation rule to be part of a belief-free equilibrium.10 Hence,Corollary 2 implies that under the conditions of Proposition 1, a belief-free equi-librium that uses the Favored Supplier Allocation attains first-best whenever anyPerfect Bayesian Equilibrium does.If first-best is not attainable, then optimal equilibria do not necessarily sat-
isfy (6). Andrews and Barron (2013) considers an example in which first-bestis unattainable and constructs a relational contract that strictly dominates anyrelational contract satisfying (6). Hence, when first-best is unattainable, the prin-cipal can use the fact that agents do not observe the true history to induce moreeffort, but (under the conditions of Proposition 1) concealing information cannotexpand the set of discount factors for which first-best can be attained.
III. Discussion
Alternative Transfer Schemes
In the proof of Lemma 1, transfers ensure that each agent’s continuation payoffequals his dyad surplus. Therefore, the principal’s continuation payoff equals 0 in
10See Ely, Horner and Olszewski (2005) for further discussion of belief-free equilibria.

16 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
every period except the very start of the game. This section discusses alternativetransfers schemes that also implement the FSA, including schemes in which theprincipal earns a strictly positive payoff in each period.Consider the following equilibrium. Every agent pays a fixed “participation fee”
to the principal in each period. The principal allocates production as in the FSA,pays the chosen agent a bonus if he produces high output, and otherwise demandsa fine from that agent. Participation fees are bounded below by 0 and boundedabove by the amount an agent currently in the last rank of the FSA would bewilling to pay, δSFSA
(N) . Hence, the principal’s continuation payoff in each period
can be anywhere between 0 and NδSFSA(N) in these relational contracts.
In the online appendix, we show that a relational contract of this form attainsfirst-best whenever δ ≥ δFSA. Each agent is induced to exert effort by a combina-tion of bonuses and fines. The principal’s payoff is independent of the allocationdecision and so she is willing to follow the FSA. Agent i stops paying his par-ticipation fee if he observes a deviation, so the principal has an incentive to paya bonus if an agent produces high output. As a result, the principal can earn astrictly positive continuation payoff in a relational contract that implements theFSA. Furthermore, if δ > δFSA, then we can reduce the participation fees paidby non-suppliers without decreasing the surplus earned by the principal. Indeed,for sufficiently patient players the principal can earn the entire expected surplusin each period and motivate agents through bonuses.In practice, agent participation fees might take the form of “pay-to-play” con-
tracts, in which a supplier makes an explicit monetary payment to secure aspot in the downstream firm’s supply chain. More generally, suppliers mightbe “awarded” a routine contract that gives them negative economic profit ineach period. A supplier accepts this negative-profit contract in the hopes ofbeing allocated more lucrative contracts in the future. In that case, the negative-profit contract serves as a participation fee paid by all suppliers and entails nonon-contractible effort, while the allocation decision determines which supplierreceives a contract that requires non-contractible effort in each period.
The Role of Private Monitoring
In our model, allocation dynamics arise because each agent observes only hisown relationship with the principal. Indeed, it can be shown that a stationaryallocation rule would be optimal under public monitoring. Suppose that all vari-ables except effort et are publicly observed. Agents can still earn no less than 0in equilibrium. However, the agents can now jointly punish the principal if shebetrays any one of them. So the principal is willing to pay the total continuation
surplus produced by every agent, δE[∑N
i=1 Si,t+1|hty], following high output. Ev-
ery agent can be motivated equally well regardless of the allocation rule becausethese bounds are the same for each agent. In particular, a stationary allocationrule would be optimal. See Barron and Powell (2015) for details.

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 17
Relationship to Board (2011)
In Board (2011), the principal chooses to invest in a single agent in each periodat a cost that varies across agents. The chosen agent earns a payoff from whichhe can choose to repay the principal. In a principal-optimal equilibrium, theprincipal promises future rent to an agent to induce him to repay today. Theserents serve as “switching costs” that encourage the principal to bias trade towardsa group of “insider” agents.Our paper differs from Board’s analysis in two crucial ways. First, the allocation
rule matters for fundamentally different reasons in the two papers. In Board,suppliers are liquidity-constrained. As a result, the principal must promise heragents rents to solve the hold-up problem. The principal then prefers to trade withagents who have already been promised rents, since she would have to promiseadditional rents to trade with an agent who has not already been chosen. Boardshows that these biases arise if the principal can commit to an allocation scheme,then proves that identical biases are optimal without commitment if players arepatient. In contrast, our allocation dynamics arise precisely because the principalcannot commit. We do not have liquidity constraints, so the principal need notpromise her agents rents to motivate them; indeed, our equilibrium constructionin Proposition 1 requires the agents to pay the principal. In our setting, theallocation rule induces the principal not to renege on her promised compensationto the agents.Second, we consider a setting with moral hazard. As noted in the introduction,
occasional failures are an inescapable feature of many business relationships. Thisfocus leads to new equilibrium dynamics. Our results apply to the setting withoutmoral hazard by setting p1 = 1 and p0 = 0. While Proposition 1 applies in thiscase, the FSA would make no distinction between past allocation decisions andpast performance on the equilibrium path because high output would occur withprobability one. The fact that the FSA tracks the past successes of each agent,but ignores the past failures, is a potentially surprising result of allowing moralhazard.
Conclusion
The Favored Supplier Allocation entails meaningful dynamics only if the set ofmost productive agents, Mt, contains multiple agents with positive probabilityin each period. If productivities {vi,t}i were instead drawn from a continuousdistribution, then Mt would be a singleton in each period and hence every first-best allocation rule would be stationary.However, non-stationary allocation rules can still be optimal if first-best is
unattainable. A suitable analogue of Lemma 1 continues to hold in this setting,so non-stationarity arises from a straightforward generalization of (1). Dynamicsmight be required for the principal to credibly promise sufficiently strong incen-tives to motivate high effort, even though they would imply that less productive

18 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
agents are sometimes allocated production. However, constructing optimal equi-libria if first-best is unattainable is intractable with a continuum of productivities.Andrews and Barron (2013) analyze optimal relational contracts if first-best isunattainable using an example with two feasible productivities, but a full char-acterization is difficult even in this simple setting.While we have focused on supplier relationships, allocation rules matter in many
settings. Managers allocate tasks and promotions among their employees. CEOsallocate scarce time and attention among their divisions. Our analysis suggeststhat these policies may be fundamentally shaped by commitment problems inlong-term relationships.
REFERENCES
Ali, Nageeb, and David Miller. 2013. “Enforcing Cooperation in NetworkedSocieties.” Unpublished Manuscript.
Andrews, Isaiah, and Daniel Barron. 2013. “The Allocation of FutureBusiness: Dynamic Relational Contracts with Multiple Agents.” Available at:https://sites.google.com/site/danielbarronecon/.
Asanuma, Banri. 1989. “Manufacturer-Supplier Relationships in Japan and theConcept of Relation-Specific Skill.” Journal of the Japanese and InternationalEconomics, 3(1): 1–30.
Barron, Daniel, and Michael Powell. 2015. “Policies in Re-lational Contracts.” Unpublished Manuscript. Available at:https://sites.google.com/site/danielbarronecon/.
Board, Simon. 2011. “Relational Contracts and the Value of Loyalty.” AmericanEconomic Review, 101(7): 3349–3367.
Bull, Clive. 1987. “The Existence of Self-Enforcing Implicit Contracts.” TheQuarterly Journal of Economics, 102(1): 147–159.
Calzolari, Giacomo, and Giancarlo Spagnolo. 2010. “Relational Contractsand Competitive Screening.” Unpublished Manuscript.
Dyer, Jeffrey. 1996. “How Chrysler Created an American Keiretsu.” HarvardBusiness Review, 74: 42–56.
Ely, Jeffrey, Johannes Horner, and Wojciech Olszewski. 2005. “Belief-FreeEquilibria in Repeated Games.” Econometrica, 73(2): 377–415.
Farlow, David, Charles A. Holloway, Glen Schmidt, and Andy Tsay.1996. “Supplier Management at Sun Microsystems (A).” Stanford UniversityGSB, Case Study OIT-16 A.

VOL. VOL NO. ISSUE THE ALLOCATION OF FUTURE BUSINESS 19
Fuchs, William. 2007. “Contracting with Repeated Moral Hazard and PrivateEvaluations.” The American Economic Review, 97(4): 1432–1448.
Harrington, Joseph, and Andrzej Skrzypacz. 2011. “Private Monitoringand Communication in Cartels: Explaining Recent Collusive Practices.” TheAmerican Economic Review, 101(3): 1–25.
Kandori, Michihiro. 2002. “Introduction to Repeated Games with PrivateMonitoring.” Journal of Economic Theory, 102(1): 1–15.
Krause, Daniel, Thomas Scannell, and Roger Calantone. 2000. “A Struc-tural Analysis of the Effectiveness of Buying Firms’ Strategies to Improve Sup-plier Performance.” Decision Sciences, 29(1): 33–55.
Kulp, Susan, and V.G. Narayanan. 2004. “Metalcraft Supplier Scorecard.”Harvard Business School, Case Study 9-102-047.
Lalond, Bernard, and Terrance Pohlen. 1996. “Issues in Supply Chain Cost-ing.” The International Journal of Logistics Management, 7(1): 1–12.
Levin, Jonathan. 2002. “Multilateral Contracting and the Employment Rela-tionship.” The Quarterly Journal of Economics, 117(3): 1075–1103.
Levin, Jonathan. 2003. “Relational Incentive Contracts.” The American Eco-nomic Review, 93(3): 835–857.
Li, Hongmin, Hao Zhang, and Charles Fine. 2011. “Dynamic Performance-Based Business Share Allocation in a Supply Chain with Substitutable Suppli-ers.” Unpublished Manuscript.
Liker, Jeffrey K., and Thomas Y. Choi. 2004. “Building Deep SupplierRelationships.” Harvard Business Review, 82(12): 104–113.
MacLeod, Bentley, and James Malcomson. 1989. “Implicit Contracts,Incentive Compatibility, and Involuntary Unemployement.” Econometrica,57(2): 447–480.
Mailath, George, and Larry Samuelson. 2006. Repeated Games and Repu-tations: Long Run Relationships. New York, NY:Oxford University Press.
Malcomson, James. 2012. “Relational Incentive Contracts.” In Handbook ofOrganizational Economics. , ed. Robert Gibbons and John Roberts, 1014–1065.
Segal, Ilya. 1999. “Contracting with Externalities.” The Quarterly Journal ofEconomics, 114(2): 337–388.
Taylor, Curtis, and Steven Wiggins. 1997. “Competition or Compensa-tion: Supplier Incentives Under the American and Japanese SubcontractingSystems.” The American Economic Review, 87(4): 598–618.

20 THE AMERICAN ECONOMIC REVIEW MONTH YEAR
Wolitzky, Alexander. 2013. “Cooperation with Network Monitoring.” The Re-view of Economic Studies, 80(1): 395–427.

������ ������� �� � ���������� �� ���������������� ����� ������� ��� ������ ��������
������� ���
����� �� �����
�� ����� ��� ��� ���� � ����� ���� ����� ���� ������ �������� ����
��� ������
����� ���
��� ���������� �������� σ∗ ��� ������ ������ ht� ������� ht+1, ht+1 ∈ Ht+10
��� ���� ht+1 ∈ �{σ∗|ht} ��� ht+1 /∈ �{σ∗|ht}� �� ht+1 ∈ �{σ∗|ht}��� ���� � ht+1 ����������� �� ht ����� σ∗� ���� Ij(h
t+1) = Ij(ht+1)
∀j /∈ {0, i}� ����
Eσ∗[Ui,t+1|Ii(ht+1)
]≥ 0 ��
Eσ∗[U0,t+1|ht+1
]≥ Eσ∗
[∑j �=i
∞∑t′=t+1
δt′−t−1(1− δ)(!j,t′yt′ − wj,t′ − τj,t′)|ht+1
].
�"
�� � ����� ���
# �� ���� ��� ���$��� ���� ����� i ����� ��$����� ��%���� �� ����� ��
���� �� ��� ������� dt = 0�
# �" � ��� ���$��� ���� �� ����� ��� ������� �� � ��$����� ��%������
�� ht+1� &������ ��� �������� ������%������$��� ��%������ �������� ht+1�
��� ��� ht+t′ � t′ ≥ 1� ��� ������� ��� σ∗0(h
t+t′)� �'��� �� �� �� ���� ��
�� ����� i� (�� ht+t′+1 �� ��� ����%�� ������ �� ��� ��������� � t + t′ + 1�
��� ������� ����� ht+t′+1 ��������� �� ��� ����������� � ������ t+ t′ + 1
���� �������� ����� �� � ��������� �� ��� ���������� � ��� ���� �� � ���� ���������
����� ���� � ��������� � ��������� �� ��� ���������� � ��� � � ���� ���� �� ���
���������� � ����
)"

��������� ���� � σ∗(ht+t′)� ���������� �� �� ����� Ij(ht+t′+1) = Ij(h
t+t′+1)
∀j �= i ����� ��� ��������� ������ j �= i ������ ���������� ht+t′ ��� ht+t′ ���
��� t′ ≥ 1� �� �� �������� ����� �� ���� �� �������� ���� �� ��� �
����� �� ����� ������� �
��� ��� �������� htH , h
tL ∈ Ht
y ���� ��� ��������� �� ��� yt = vxt,t �� htH ���
yt = 0 �� htL ����� Ri(j) = Eσ∗
[(1− δ)τi,t + δUi,t+1|ht
j
]��� j ∈ {L,H} �
�� �!���"���# ���� ����� i ������ et = 1 ��� ��
p1Ri(H) + (1− p1)Ri(L)− (1− δ)c ≥ p0Ri(H) + (1− p0)Ri(L). �$�
%� &�##� ' (� τi,t �� ���� �� ht ∈ Ht
y �� �!���"���# ��� ��
(1− δ)Eσ∗ [τi,t|ht] ≤ δEσ
[∑∞t′=t+1 δ
t′−t−1(1− δ)(i,t′(yt′ − cet′)|ht]
−(1− δ)Eσ∗ [τi,t|Ii(ht)] ≤ δEσ∗ [Ui,t+1|Ii(ht)]
.
�������� ����� �� �������� �� ����� i ���� ������� "� ��� ������ τi,t
)������ ���� ����������� ���� �$� ����� �(� �
����� �� ����� ������� � �
*� ��������� �������� �������� σ∗ ����� � �������� σ ��� �������� �(� ���
��� �������� ����� σ� ����� H(σ) ⊆ H �� �� ��� �� ������ �������� ���
��� �� ��������� ��� � �� �� ��#��� �� H×H *� �� ������ ��������������������� �� σ �� σ∗ "� ht
a �� ht,∗a � �����������
�� ������� � ����������� ����������� *� ���������� ��������� � ����
������ �!���"���# σ∗ +� ������������ "����� ��� �� ���#����� ������
���������� �� ��� �������� �� �� ����� �� �� ��#�� (h10, h
1,∗0 )� ���� h1
0 = h1,∗0
( ��� ��� t′ ≥ t� �� (ht0, h
t,∗0 ) ∈ HAug ��� ht
0, ht,∗0 ∈ Ht
0
, ��� ��� ht,∗v ∈ Ht
v �� �� ������� �� σ∗|ht,∗
0 � �� htv "� �� �������������
��������� �� ht0 ��� �� ��#� ������������ ����-������ +� ��������
,$

������� �� hte ������� �� σ|ht
v ��� ������� ������� x∗t �� � ht
e� ��
���� w∗i,t = 0 ∀i �= x∗
t � ���
w∗xt,t =
[(1− et)vxt,tp0 + et
(vxt,tp1 + (1− p1)
δ
1− δEσ
[Si,t+1|Ii(ht
e), yt = 0])]
.
����
� ����� x∗t ������� d∗t = 1 � w∗
xt,t ≥ vxt,tp0 �� e∗t = 1 � w∗xt,t ≥ vxt,tp1
� �� et = 1 �� yt = 0� ���� τ ∗xt,t = −w∗xt,t
−vxt,tp1
1−p1 ��������� τ ∗xt,t = 0 ���
��� ������ i �= x∗t � τ
∗i,t = 0
!�� ht+1,∗0 ∈ Ht+1
0 "� ��� ����#� ������ ����� �������� ����� ����� !��
hty ∈ Ht
y "� ��� �$������� �� hte ��� ��� ��%� y∗t �� � ht+1,∗
0 ���
������� ������� ht+10 ∈ Ht+1
0 ������� �� ��� �������� ���"$���
σ|hty &����� ��� ��� ��� ������� (ht+1
0 , ht+1,∗0 )
' �� � �(���� ���$�� � ��� (���"�� �)���� et� ��� ������� ����������
������� xt = 1 �� ���� �� ��������� ������ ��� �"���(� � �(����
������ dt = et = 0 �� ��� �� ���������
����� ������ �� �� σ � � σ∗� *� ���% ���� σ �� σ∗ �������� ��� ��%�
���"$��� �(�� {vs, xs, ys}ts=1� ∀t ≥ 1 +� �$����, ��� ���$�� � %%����
��� t = 1 �� � ���� ��� t� ��� (ht0, h
t,∗0 ) "� ��� �$�%���� ������ �� ��� �����
�� ���� t + 1 � ��� ���$��(� ������$���� F � �)�����$� -������� ��
vt� ��� p0 > 0 ������ (x∗t , d
∗t , e
∗t ) ��� ���� �� � σ|ht
v� ���� ��� p0 = 0 ���
�������$� �����%��� ���� ��� (x∗t , d
∗t e
∗t ) �� ����� ����� ��� ���"$��� �(��
�$��$� � ��� ��%� � σ �� σ∗ ������� ��� �$�%���� ������ (ht+10 , ht+1,∗
0 )
� ���� ���% ��� ���"$��� σ|hty �(�� ht+1
0 .� ��� �������� ���"$���
�(�� "� σ∗|(ht0, h
t,∗0 ) �(�� ���� t+ 1 �$�%���� ������� � ��� ��%� �� ���
�������� ���"$��� σ|ht0 �(�� Ht+1
0 ��� ���"$��� �(�� (x∗t , d
∗t , e
∗t ) �
���� ������ � σ �� σ∗� ���� ���(�� ��� ���%
*� %%������ �����$� ���� ��� ��� (ht0, h
t,∗0 ) � ��� ������$����� σ|ht
0
�� σ∗|ht0 ��(� ��� ��%� �)����� ����� �����$���� �$���$�
��

��� ������� �� �� ��� ��� ��������� ����� σ∗� ��� ���� �����
0 � ���� ����� �� ���� t� ��� ���� ��� � ������ ���� σ∗ � x∗t �
{w∗i,t}Ni=1� �� {τ ∗i,t}Ni=1� �� ���� ��� �������� ��� ���� ����� 0 � �
������ ������ ���� τ ∗i,t ≤ 0� ��� ���� ��� �� ������ � ������� �
{τ ∗i,t}Ni=1� � ������� ���� w∗i,t = 0 ��� i �= xt ��� � �� �� �� � �������� ��
�� ���� � ������� � w∗xt,t� ��� ���� ����� yt − wxt,t − τxt,t� �� wxt,t <
vxt,tp0� ���� d∗t = 0 ��� ��� ���� �� ���� � �� � 0� �� wxt,t = vxt,tp0� ����
����� ����� xt ������� � ������� !yt = τxt,t = 0"� �� �� ������� ��� �������
d∗t = 1� e∗t = 0� �� ����� ����� ��� ���� �� ���� � ���# � �������� ��
wxt,t ������� !$%" ��� � ��� �������� �� � �������� ���� ����� xt �������
d∗t = e∗t = 1 ��� ��� τ ∗xt,t� �� ��� ���� ����� 0� ��� ����� wxt,t � ��������
�� � ������� ��� �� � �������� �� ���� ��� ���� ��� ����� ���� ����
���� 0 ��� ��� � ������ ������� ��� ��� �� ������ � ������� ���� x∗t � ��
��� ���� ��� �� ������ � ��������
��� ���� �� �� ��� ��� ��������� &� ���� ���� ���� �� �����
������ ������ � ������ ���� d∗t , e∗t � ��� τ ∗i,t < 0�
�� � ���� ���� ����� (ht, ht,∗) ��� (ht, ht,∗) ��� ��� ��������� �������
���� ��� ������������ ����� Ii(ht) = Ii(h
t)� '��� �� � �� Ii(ht,∗) =
Ii(ht,∗)� ��� t = 1 ��� ���� � ���� � �� ��� ����� � �� �� ��� � �������
�� ����� t − 1� ��� ����� ������� ����������� ���� Ii(ht,∗) �= Ii(h
t,∗0 )�
'��� ����� �(��� ���� ����� � � ���� t − 1 ���� ����� ������� ht,∗ ���
ht,∗ ��� � �������� �� ����� i� � ���)�������� ����� �� ��� ��� ���� � ht,∗
��� ht,∗ ������� ���� ��� ��� ���� � ht ��� ht� '������� τ ∗i,t ������ �� �
�� w∗i,t� ��� w∗
i,t ������ �� � �� ���)�������� ����� �� ��� Ii(ht−1e )� �����
Ii(ht−1e ) = Ii(h
t−1e ) �� ��������� '��������� Ii(h
t,∗) = Ii(ht,∗) �� �������
*��� ����� ��� ����� ������� ���� τ ∗i,t� �� τ∗i,t = 0� ���� ���� � �������
������ �� ������ �� ����� τ ∗i,t < 0� +� ��� ���� ���� σ ��� σ∗ ��� ����
� ��� ����
Eσ
[Si,t+1|ht+1
0
]= Eσ∗
[ ∞∑t′=t+1
δt′−t−1(1− δ)$i,t′(yt′ − cet′)|(ht+1
0 , ht+1,∗0 )
]
,$

��� �� ������ (ht+10 , ht+1,∗
0 ) ���� � ����� ��� �� σ∗� ��� � ����� ���
���� 0 �� � � ����� �� σ∗�
Eσ∗
[ ∞∑t′=t+1
δt′−t−1(1− δ)ut′
i |(ht+10 , ht+1,∗
0 )
]= Eσ
[Si,t+1|ht+1
0
]. ����
������� � ������ ht,∗y �� � �� τ ∗i,t < 0 ��� e∗t = 1 ��� y∗t = 0�� ���
Eσ∗[Ui,t+1|Ii(ht,∗
y )]= Eσ∗
[Si,t+1|(ht
y, ht,∗y ) ��� Ii(h
t,∗y ) = Ii(h
t,∗y )]=
Eσ∗[Eσ
[Si,t+1|Ii(ht
y)]|(ht
y, ht,∗y ) ��� Ii(h
t,∗y ) = Ii(h
t,∗y )]= Eσ
[Si,t+1|Ii(ht
y)] .
�� ��� �� �� ������� ����� �� ����� �� � ��� ������ ����� ��� ��
������� ��� σ∗ ���� � � ����� ������� � � ��� ���������� �� ��� σ
�� � �� ���� ������� ��� ��� �� ����� ���� � ���������� ���� �
�� σ∗ � � (ht, ht,∗) �� � ��� �� � ���������� ���� � �� σ � � ht��� ��
���� ������ ����� � ��� �� Ii(ht,∗y ) = Ii(h
t,∗y )� �� w∗
i,t = w∗i,t �� �� ��
�������� !� �� Eσ [Si,t+1|Ii(hte), yt = 0] = Eσ
[Si,t+1|Ii(ht
e), yt = 0]�� �
������� �� w∗i,t�
"�������� � � ������ Ui,t+1 = 0� ������� ��� i ��� �� �������
� ����� ��
−(1− δ)τ ∗i,t ≤ δEσ
[Si,t+1|Ii(ht
e), yt = 0],
��� � ����� ���� ������� �� ����� ����
"������� � ���� �� ��� i ��� �� ������� � ����� ���� d∗t �� e∗t � #�
d∗t = 0 �� e∗t = 0� � ���� ������� ��������� $�� i ��� �� �������
� ����� ���� e∗t = 1 �� ��� #� ������� �%� ������ &� � τ ∗i,t� ��� �������
��� � ����
δEσ∗[Ui,t+1|Ii(ht,∗
e ), y∗t > 0] ≥ (1− δ)
c
p1 − p0.
!� Eσ∗ [Ui,t+1|Ii(ht,∗e ), yt > 0] = Eσ [Si,t+1|Ii(ht
e), yt > 0] �� � ������ ��� �
������ ���� ���� ������ ht σ ���������� �� � � ��� �������� � ���� (ht, ht,∗) ��� �������� ��
'(

�� ���� ������� ����� � ����
�� ������� ���� σ∗ �� � ���������� �������� ���� �������� ��� ���������� ��
����� �� �
����� ���
��������� �� ���� ��
��� ΩFSAt ��� Ωt �� ������ �� ��� ����� �� ����� �� ΩFSA
t ≤ Ωt ��� ��� t�
���� �� ���� ��
����� bLi (ht, k) = 1i,t (k) 1 {i /∈ H (ht)}� ��� ��� βL
i,t (k) = Eσ
[bLi (h
t, k)]. ���
�� ������ !���� ���� ������� ����"���� ����� ��� ������ � ���� � ����"
������ ����� �� �#"���� ���������$��� ��!�$��� βLt (k) + βH
t (k) ≡ 1NF k ���
F k = Pr{vmax,t = vk
}�!���� !� � ��� �� � ����� �� ���� ��� i ����������
%�� !� ��� ��� ��"!���� ���� ����� ��
Ωt =t∑
s=1
δs−t
K∑k=1
βLs (k)
(p1δS + (1− δ)V FB
k
)− (1− δ)
t∑s=1
δs−t
K∑k=1
1
NF kV FB
k .
&��� ���� ���� �#�� ����� ����������� ���� ����� �� ������� ����������
� ��� ������{{
βLt (k)
}Kk=1
}∞
t=1� !���� !� !��� ������ � B� ������ B
��� BFSA �� ��� ������� ������� � σ ��� σFSA� !��� �������� βLt (k) ���
βL,FSAt (k) ��������$�� �� ��� ��� � ����� �� ���� ��� i ���������� !�
���$� ��� ����� � ���������� Bn ��� n = 0, 1, 2, ... ��� ���� B1 = B ���
Ωnt � ��� ���� ����� ������� � Bn, �� ��������� �� n !��� limn→∞ Ωn
t = ΩFSAt .
%� ������� ����� Bn� ��� ���� n ≥ 1 ��� βL,nt (k) = βL,FSA
t (k) ��� t < n� ���
βL,nt (k) = βL
t (k) ��� t > n� ��� t = n� ������ βL,nn (k) ��� ����
βL,nn (k) ≥ max
{βL,FSAn (k) , βL
n (k)}
��� ��� k
���∞∑t=1
K∑k=1
βL,nt (k) ≡ 1
p1. ��'�
��

����� ��� ������ �� � ��� ��������� ��� ������ �������� � � ��������
���� �� � ���������� �������� �� � ��������� ����������� ��� ��� ���
� �� � ��� �� ����� B �������� � � ������ ���!�� σ �������� !�����
������� ���������� σ ��� σFB� ��� ������ �� ��������� "��� ���#��� �
��� ��� � �� ��������� �� � �� �� �� ������ B � �� ��� � ��������
� !����� ������ ���!��� � �� �� �� �� �� ���� �� Bn� �� � ���� �� ��
������� � � ���� � Bn ����������� � ��� ������ ���!��� ��� �� ���
���� �������� � ������� ���������
$� ���� � � �� � ��� ��� n� t ����� Ωnt ≥ Ωn+1
t � "�� � βL,ns (k) =
βL,n+1s (k) ��� s < n, ��� βL,n
n (k) ≥ βL,n+1n (k) � ����������� �� ����� Ωt ��
���������� �� βLs (k) ��� ��� s ��� k � ����� �� �������� ��� t ≤ n� %����� �
������� ���� � ������� � ���� �� t > n� &� �� ����� ��� � βL,ns (k) ���
βL,n+1s (k) ���� �������� ��� ��� s /∈ {n, n+ 1}� �� � ��'������ �� ���������
��
Ωnt − Ωn+1
t
= δn−t
(K∑k=1
(p1δS + (1− δ)V FB
k
)(βL,nn (k)− βL,n+1
n (k) + δβL,nn+1 (k)− δβL,n+1
n+1 (k)))
.
$� (��� � ���������� �� Bn �
βL,nn (k)− βL,n+1
n (k) = βL,nn (k)− βL,FSA
n (k) ≥ 0
� ���
βL,nn+1 (k)− βL,n+1
n+1 (k) = βLn+1 (k)− βL,n+1
n+1 (k) ≤ 0
��� � ���� ��� � ��� � βL,ns (k) ��� βL,n+1
s (k) �������� ��� s /∈ {n, n+ 1}K∑k=1
(βL,nn (k)− βL,n+1
n (k))= −
K∑k=1
(βL,nn+1 (k)− βL,n+1
n+1 (k))= Δn
��� ���� #���� Δn ≥ 0� � ��� �� ��� ���� Ωnt −Ωn+1
t ���� ���� � ��������
� βL,nn (1) − βL,n+1
n (1) = Δn� βL,nn+1 (K) − βL,n+1
n+1 (K) = −Δn� ��� ��� � ��
�)

���������� �� ��� � ����� ���� ������
Ωnt − Ωn+1
t ≥ δn−t((
p1δS + (1− δ)V FB1
)Δn −Δnδ
(p1δS + (1− δ)V FB
K
))
����� �� ��� �� �� ���� �� �� ���� �� δV FBK ≤ V FB
1 +p1δS� ����� �� ���������
�� ����� ��� ������ �� �� � ���� �� ���� ���
����� �� ����� �
��������� �� ���� ��
��� �� n� �� �� ����� Bn ���� � βL,nt (k) = βL,FSA
t (k) ��� t < n� βL,nt (k) =
βLt (k) ��� t > n, βL,n
n (k) ≥ max{βL,FSAn (k) , βL
n (k)}, ��
∑∞t=1
∑Kk=1 β
L,nt (k) =
1p1.
���� �� ���� ��
�� � �
βL,nn (k) ≥ max
{βL,FSAn (k) , βL
n (k)}
�� �� ���� ��
βL,nn (k)− βL
n (k) ≥ max{βL,FSAn (k)− βL
n (k) , 0}.
����� ��� ������ �� βL,nn (k) �� ��� ��� �� ���� �� �� ����� �� ���� ��� !"#$�
�� �� ��� � ������ ���� βL,nn (k) ��� �� k �� �� ���� �� �� �� ������ �
K∑k=1
(βL,nn (k)− βL
n (k))≥
K∑k=1
max{βL,FSAt (k)− βL
t (k) , 0}. !"�$
����� βL,nt (k) �� βL
t (k) �������� ��� t > n, !"#$ �� � � ���� ���� ��� B����� �
n∑t=1
K∑k=1
(βL,nt (k)− βL
t (k))= 0
�%

����� ����� βL,nt (k) �� βL,FSA
t (k) ������ �� t < n ������� ����
K∑k=1
(βL,nn (k)− βL
n (k))=
n−1∑t=1
K∑k=1
(βLt (k)− βL,FSA
t (k)).
���� �� ��� �������� ���� ��
n−1∑t=1
K∑k=1
(βLt (k)− βL,FSA
t (k))≥
K∑k=1
max{βLn (k)− βL
n (k) , 0}.
���� ��������� ��� �� �� ��� ��
p1
n−1∑t=1
K∑k=1
(βLt (k)− βL,FSA
t (k))+ p1
K∑k=1
min{βLn (k)− βL,FSA
n (k) , 0}≥ 0.
����
��� ����
p1βLt (k) = Prσ
{����� i ������ ���� ����� �� ���
���� ���� �� ��� t �� ��� ����� ���� �� vk
},
����� ��� ������ ����� ��� ���������� ��� �� ��� �� �!����� t ��"� k#
���� �� K ��� ������ � {1, ..., K} ��
C (n,K) =
{����� i ������ ���� ����� �� ���� n− 1 ����
� ������ ���� ����� vk �� k∈ K �� ��� n
}
�� ���� ����
PrσFSA {C (n,K)} = p1
n−1∑t=1
K∑k=1
βL,FSAt (k) + p1
∑k∈K
βL,FSAn (k) .
��� ������ ����
p1∑k
min{βLn (k)− βL,FSA
n (k) , 0}= min
K⊆{1,...,K}p1∑k∈K
(βLn (k)− βL,FSA
n (k)).
�$

����� ��� � ��� ����� ��
PrσFSA {C (n,K)} ≤ Prσ {C (n,K)} ��� ��� K ⊆ {1, ..., K}
��� � ������ �� ���� ���� σFSA ������ Prσ {C (n,K)} � �� ��������� σ.
�� ���������� ��� �������� �������� ������ σ ����� γt (m) = Prσ {|H(ht)| = m}�� � ��� ��� � ��� ���� �!����� m ������ �� � �������� ��� ������ �����
����� t ����� σ� ��� ���
ψt (m, k) = Prσ{xt ∈ H
(ht), vmax,t = vk||H(ht)| = m
}�� � ��� ��� � ��� ���� ��� ������� ������� �� ����� ��� ��� �������
�������� ��� ������ ��������� �� ��� � ���� ���������� � ������� ��
����" ����� ��� � ���� �� � � ����� ��������� �� βLt ����� σ#
βLt =
1
N
N−1∑m=0
γt (m)K∑k=1
(F k − ψt (m, k)
).
$���� � ������� ���� ��� ��� �������� ������ ������ ����% ��� ��������
ψt (m, k) ≤ Prσ{Mt ∩H
(ht) �= ∅, vmax,t = vk||H (ht
) | = m},
���� �������� σ ���� �������� ��������� �� ������� ������ ��� ���� �
��� � ���"�� &������ ���� ���� �� ��� ����� γt (m) ������ ��� � ����� ��
ψt (m, k)� ���� γt (0) = (1− p1) γt−1 (0)� ���� ��� m ≥ 1
γt (m) =K∑k=1
(ψt−1 (m, k) γt−1 (m) + (F k − ψt−1 (m, k))(1− p1)γt−1 (m)
+(F k − ψt−1 (m− 1, k))p1γt−1 (m− 1)
).
'��� ����� ��� ��������� ���� ����
Prσ {C (n,K)} = 1N
∑Nm=0 mγn (m) + p1
∑k∈K βL
i,n (k)
= 1N
∑Nm=0 mγn (m) + p1
N
∑k∈K∑N−1
m=0 γn (m)(F k − ψn (m, k)
).
��(
������������ ���� �� � � � �� ���� �� γt (m) = 0 ��� �� ���� ���� ψt (m, k) ��� � �����
� ������� � ��� �� �� �� ��� �����������
)*

���� ������� ���∑N
l=0 γn (l) ≡ 1 � �� �������� � ��∑N
l=0∂γn(l)
∂ψs(m,k)= 0, �����
��� s ≤ n,
∂γn (l)
∂ψs (m, k)=
⎧⎪⎪⎪⎨⎪⎪⎪⎩0 �� l < m
> 0 �� l = m
< 0 �� l > m
.
�� �� 0 ≤∑k
(F k − ψt (m, k)
) ≤ 1 ��� ��m � ��� ���� � m+p1∑
k
(F k − ψt (m, k)
)�� � ����� � � m� ���� ��� ������ ��� ���� �� ����� ������� � � ψs (m, k)
��� �� s� �� �� σFSA ������� ψs (m, k) � ���� � ������� ���� ������ ���
������
����� �� ���������
� ����� �� ����!��� �"�������� ���� ������ xt ∈ Mt � ��� ������
t ≥ 1� �� �� �� ���������� �� � � ����� �� �"�������� ����� �#����
���� �� � i ���� ���
$�{i ∈ Mt, xt = i}E[vmax,t|i ∈ Mt, xt = i] ≤ 1
NE[vmax,t],
∀t ≥ 1� %�� ��� ������� ��� ����!��� �� ��� �� � ����� �� �"����!
���� � �� ��S ≤ 1N(E[vmax,t]p1 − c) , ����� ������� ��� δ ≥ δStat �� �������
�� ����� � &� �� ��'��� � ����� ��� ������� ���� ��� ������� xt ∈ Mt � �!
������ � � ��� � �(���� et = 1� ∀t� ������� ��� ��� � δ ≥ δStat�
�� �� ��� �� �� �� ���� � δ� �� ����� δFSA < δStat �� ��'��� �� ���� ���
��� ����� ���� ������ � �"����� ��� σFSA � δ = δStat� )� �������� � � �
*� SFSA(j) �� �������� ������� � � j� )�� ��� SFSA
(1) > 1NE[vmax,tp1 − c] �����∑N
j=1 SFSA(j) = E[vmax,tp1 − c] = V FB� %��� δFSA < δStat � ��� ���� ��
δStat��
*+

��� ������ ���� ����� ��������� � ������
���������� ������� ������
��������� � � �������� ������� �������
��� ��������� �� � ������ ��� ��� � �� ���� �������� �� ���� ��� � t� ���
�������� �� ��� xt �� �� ���� ��� �� ��� ����� ����� ext,t = 1� ��� � �� ����
������� �� �����
�� wxt,t ������
wxt,t = (vxt,tp1 − E[τxt,t|et = 1])− δSFSA(N) ,
���� τxt,t �� ������ ��� �� � �� ���� wxt,t � ��� �� ����� � ���� �
������ � !���� �" ����� ��� �������� ����� xt#�
$� %��� ����� i �= xt ��"�
wi,t = −δSFSA(N) .
&� � ������ i �= xt� τi,t = 0� ����� xt ����� �� �� �"��'������ ��
E[Sxt,t+1|Ixt(ht+10 )] � �� ���� � � ������ ����
τxt,t =
⎧⎨⎩
δ1−δ
δSFSA(N) �� yt = vxt,t
− δ1−δ
(E[Sxt,t+1|Ixt(ht+10 )]− δSFSA
(N) ) �� yt = 0.
� �� ���� ��" �� ���� � ���� �� ��� �� �" ��� �������� ��� ����� i� �����
i �������� �� ��� dt = et = 0 ��� wi,t = τi,t = 0� ��� �������� � �������
� ��� ���� � ����� � �� �� ��� ���� (� ����� i �� ��� ����� � ����� � ����
�� ��� ��� �� � �� ���� �� ���� �� �� ������ �� �� �� � ����� yt > 0 ����
� �������" p1 ��� �� ������� ������ �� �� yt = 0�
�������� � ���� �
���� �� ���� ���� �)���� � *+% ���� ������� ���'���� ��� ���� ��� � ����� ��
� * � ���� � �� *�� $ � ��� ���� ��� ��������� �������� �� � �� � *+%
&,

���� ������� ��������
�����
� ����������� �� �� ������ �� ���� ���� ��� ���������� �������� ���� ��� �
� � �������� ��� ��� ���� ��������� �� �������� �� ��� ����� �� � � �� ��
���� �� ��� � ���� �������� ��� ��������! ����� � �"�� ������������ ����
���# ���� ����� $�%��! �� 0 �� ��� ����� ��� ������� � ��������� ��� δSFSA(N)
���������&� ������!��� �� ��� �!!������� �������� �� ���� �������� '�� �!!���
���� �������� �!�� �����#���� ���� �����(� �!���� ���� ����� ������� ���)�����
*������� ����� �!���� ���� �"���!� � ������� � ���� �� ��� ���� ��� ������
��� ���� ����� ��� �� ���� �� � ��� �� ��� ��������!(� ���� � �� ��� ��������!
�� ���� ����� ������ �!! �!!������� ��������� ��� ����� �� ��!!��� �� ��!!�� ���
��� �!!������� ��!��
�� ����� ��� �� ��� �!!������ ���������� ����� �� !��� ���� SFSA(N) −δSFSA
(N)
�� ������������ ����!�� �� ���� ������ ������ SFSA(k) ≥ SFSA
(N) ��� �!! k ∈{1, ..., N}� �� ����� ����� 0 ��!!����� � ���������� �� ����� i �= xt �� ��!!���
�� ��� wi,t ��
−(1− δ)wi,t ≤ δ(1− δ)SFSA(N)
����� ��!�� � ������������� +� wxt,t < 0� ���� � �������� ��������� ��� �����
xt �� � ��!!��� �� ��� wxt,t ��
−(1− δ)(vxt,tp1 − c− δSN) ≤ δ(1− δ)SFSA(N) ,
����� ��!�� ������ vxt,tp1−c ≥ 0� '�� ��������! ����� (N−1)δSFSA(N) ��!!�����
� ��������� ������� � ����� i� �� ��� ��������! �� ��!!��� �� ��� wxt,t > 0 ��
(1− δ) (vxt,tp1 − wxt,t − E[τxt,t|et = 1]) + δ2SFSA(N) ≥ 0.
�!������ �� wxt,t ���!�� δSFSA(N) ≥ 0� ����� �!���� ��!��� �� ����� ��� ��
������!� ���������� �� �����
'�� ����� ����� 0 ������������ ����!�� ��!!����� !�� ������ ��� δSFSA(1)
,-

������� ������� ��� �� �� � �� � ���� � ���� ���� �
c
p1 − p0≤ δ
1− δSFSA(1) .
��� � ���� �� �� ��� � ������ � ��
��� ������ � ���� � ��� τxt,t > 0 ������� ��� ���� δSFSA(N) ���� ���
xt ���� ����� t+ 1 �� ��
(1− δ)τxt,t = (1− δ)δ
1− δδSFSA
(N) ≤ δ2SFSA(N)
�� ��� ��� �� ��� xt ������� �� �� �� � ������� � E[Sxt,t+1|Ixt(ht+10 )]−
δSFSA(N) � yt = 0� �� �� � ���� � ��� τxt,t < 0 �������
−(1−δ)τxt,t = δ(E[Sxt+1|Ixt(ht+10 )]−δSFSA
(N) ) ≤ δ(E[Sxt,t+1|Ixt(ht+10 )]−δSFSA
(N) ).
����� �� � �� ��� � � �������� �� � �� ��� ��� ������� !"�
� �� ��� ��� �
!������ � ���� � �� � �������� ��� �� ��� i� �� ������ ����
(N − 1)δSFSA(N) ���������� �� �� ������ � ���� �� �� � ���� � ������
�� �������� ������ �� ��� ������#� ���� ���� � � ��� � j �= i �
�������� �� ���� � � ���� ���� ���� � ���� ���� ������ $ ��
���� ���� � � ��� i� wi,t = τi,t = 0 �� dt = et = 0 ������� xt = i ���
����� ��� ��������� � ����� ������ ������ � �� ����� �� ��� � ���
�������� � ���� �� "� ���� � � ���� ���� ���� � �% �� ��������
�� ���
��� ������� � SFSA(k)
�� "�� � $$��� �� F k(j) �� �� ������� � �� vmax,t = vk �� �� ��
j − 1 ��� ���� �� ������ �� ��� � ��� � Mt � �� t&
F k(j) = Pr
{{1, ..., j − 1} ∩Mt = ∅, vmax,t = vk}
'�

��� ���
F(j) =∑k
F k(j) = Pr {{1, ..., j − 1} ∩Mt = ∅} .
�� ����� ����� � ��� � SFSA(j) �� ������ �� ������� ��
SFSA(j) =(
1− F(j)
)δSFSA
(j) +∑N
k=1
(F k(j) − F k
(j+1)
)(1− δ)(vkp1 − c)+(
F(j) − F(j+1)
)δ(p1S
FSA(1) + (1− p1)S
FSA(j)
)+ F(j+1)δ
(p1S
FSA(j+1) + (1− p1)S
FSA(j)
)����
����� �� ����� F(N+1) = 0 ��� ���� ��� ��� ��� ����
Pr{{1, ..., j − 1} ∩Mt = ∅, j ∈ Mt, vmax,t = vk
}=(1− F k
(j+1)
)−(1− F k
(j)
)= F k
(j) − F k(j+1).
������� ����� �� ������� �� �� �����
⎛⎜⎜⎜⎜⎜⎜⎜⎝
SFSA(1)
SFSA(2)
SFSA(3)
SFSA(N)
⎞⎟⎟⎟⎟⎟⎟⎟⎠
= A
⎛⎜⎜⎜⎜⎜⎜⎜⎝
v1p1 − c
v2p1 − c
v3p1 − c
vKp1 − c
⎞⎟⎟⎟⎟⎟⎟⎟⎠
+B
⎛⎜⎜⎜⎜⎜⎜⎜⎝
SFSA(1)
SFSA(2)
SFSA(3)
SFSA(N)
⎞⎟⎟⎟⎟⎟⎟⎟⎠
�� !��� �!������
SFSA = A (vp1 − ιKc) +BSFSA
��� N ×K ��� N × N !������ A ��� B ���� ����� ��� ��"����� ���!
����� ��� ιK � K × 1 ����� �� ���� ������� ��� SFSA ������ ������
SFSA = (IN −B)−1 A (vp1 − ιKc)
���� ������ � �� ������ �� ���� �� � ��� � ��� ��� ����!���� ��� ��
#$