Embed Size (px)
Citation preview
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 1
Balancing Power Demand through EV Mobility inVehicle-to-Grid Mobile Energy Networks
Rong Yu, Member, IEEE, Weifeng Zhong, Student Member, IEEE, Shengli Xie, Senior Member, IEEE,Chau Yuen, Senior Member, IEEE, Stein Gjessing, Senior Member, IEEE, Yan Zhang, Senior Member, IEEE
Abstract—Vehicle-to-Grid (V2G) technology enables bidirec-tional energy flow between electric vehicles (EVs) and powergrid, which provides flexible Demand Response Management(DRM) for the reliability of smart grid. EV mobility is a uniqueand inherent feature of the V2G system. However, the inter-relationship between EV mobility and DRM is not obvious.In this paper, we focus on the exploration of EV mobility toimpact DRM in V2G systems in smart grid. We first presenta dynamical complex network model of V2G mobile energynetworks, considering the fact that EVs travel across multipledistricts, and hence EVs can be acting as energy transportersamong different districts. We formulate the districts’ DRMdynamics, which is coupled with each other through EV fleets. Inaddition, a complex network synchronization method is proposedto analyze the dynamic behavior in V2G mobile energy networks.Numerical results show that EVs mobility of symmetrical EV fleetis able to achieve synchronous stability of network and balancethe power demand among different districts. This observation isalso validated by simulation with real world data.
Index Terms—Electric vehicle mobility, vehicle-to-grid, de-mand response management, smart grid, V2G mobile energynetwork.
I. INTRODUCTION
IN traditional power systems, the electricity generation isconfigured to follow the demand of consumers. The day-
ahead schedule of generation will be developed by predictingthe consumers’ load profile [1]. In smart grid, renewable ener-gy sources are well deployed, so that consumers may choosetheir energy sources with more freedom. In addition, mi-crogrids are developed as self-sustaining systems, integratingdistributed generations, energy storages, real-time control and
Manuscript received June 17, 2015; revised September 11, 2015; acceptedOctober 08, 2015.
Copyright (c) 2009 IEEE. Personal use of this material is permitted.However, permission to use this material for any other purposes must beobtained from the IEEE by sending a request to [email protected].
The research is supported in part by programs of NSFC under grant nos.61422201, 61370159, U1201253 and U1301255, Guangdong Province NaturalScience Foundation under grant no. S2011030002886, Special Support Projectof Guangdong Province under grant no. 2014TQ01X100, High EducationExcellent Young Teacher Program of Guangdong Province under grant no.YQ2013057, Science and Technology Program of Guangzhou under grantno. 2014J2200097 (Zhujiang New Star Program), 240079/F20 funded by theResearch Council of Norway, the European Commission FP7 Project CROWNunder grant no. PIRSES-GA-2013-627490 and Energy Innovation ResearchProgramme (EIRP) Singapore under project no. NRF2012EWT-EIRP002-045.
R. Yu, W. Zhong and S. Xie are with School of Automation,Guangdong University of Technology, China (e-mail: [email protected];wf [email protected]; [email protected]).
C.Yuen is with Singapore University of Technology and Design, Singapore.(e-mail: [email protected]).
S. Gjessing and Y. Zhang are with Simula Research Laboratory andUniversity of Oslo, Norway (e-mail: [email protected], [email protected]).
energy transaction [2], [3]. With the renewable and microgrid,predicting consumer demand becomes more difficult. There-fore, in smart grid, the consumer demand is expected to becontrolled so as to coordinate with the electricity generation,which is the main objective of Demand Response Management(DRM). The DRM aims at shaping the load profile forbalancing energy demand and supply [4]. In [5], the DRMis that electricity generation is scheduled according to theengagement plans made by consumers. Moreover, game theoryis employed in DRM [6]–[8], in which the benefits of bothconsumer and utility provider are considered. In residentialgrid, with the help of smart meters, the DRM scheduler is ableto control the energy consumption of household appliances forshaping load profile and reducing electricity cost [9], [10].
Electric vehicles (EVs) are regarded as the vehicles of futurebecause of their high potential economy and environmentalbenefits. The charging demand with large EV population willimpact the power grid significantly. However, EVs actingthe flexible mobile energy storage are considered as theconsiderable resources for smart grid. The Vehicle-to-Grid(V2G) technology enables two-way communications and bidi-rectional energy flow between EVs and grid. Aggregator actsthe agent for the battery management and the charging ofEVs. Dynamic pricing encourages the charging of EVs toconsume the redundant energy from grid. During load peak,EV users perform discharging to feed energy back to grid forenergy arbitrage. The authentication schemes based on EVsguarantee the security of V2G communications [11], [12].With the developments of and Internet of vehicle [13]–[15]and vehicular cloud [16]–[18], the V2G technology enablesEVs to achieve flexible DRM in real time. The V2G systemsprovide DRM services for power grid and at the same timesatisfy the EV charging demand.
In the research of DRM by using EVs, different approacheshave been proposed for EV charging and discharging manage-ment. In [19], the authors analyze the DRM performance whenEVs perform off-peak charging. Dynamic pricing is employedto control the charging and discharging behaviors of EV users[20]. The electricity generation from wind power [21] andphotovoltaic power [22] is dispatched to satisfy EV chargingdemand. The V2G control based on battery State-of-Charge(SOC) is proposed in [23] to achieve frequency regulation forpower grid and EV charging. Furthermore, many factors havebeen considered in literatures to improve the performance ofDRM, including EV user profit [24], various costs of grid [20],[25] and fairness [26].
In the study of V2G systems providing DRM, an EV

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 2
model is very important to have a fundamental understandingof EV demand and EV mobility. Because these two factorswill influence the availability and the capacity of DRM byusing EV batteries. Most existing studies consider that thearrived EVs have random SOC, so that the EVs have randomcharging demands [22], [23]. The EV mobility is modeledas the arrival process, provided by Gaussian distribution [19],Poisson process [27] and Markov chain [24]. As describedabove, the EV models are simplified and the EV mobility islimited within a single geographic area (an isolated node). TheEV mobility across different areas is ignored.
In real scenario, EVs may travel among different areas. EVscan serve as mobile units that transport energy from one placeto another. The authors of [28] explore electricity transmissionand distribution by using EVs. They consider that electricbuses travel among stations regularly and transport energyfrom renewable sources to consumers. In this scenario, theenergy routing problem is analyzed in [29] to reduce the totalhops of energy and the blocking of energy routes. Normally,the trips of EVs among districts are determined by EV users,which are self-motivated and uncontrolled. For example, mostpeople drive EVs and head for work in the morning. It seemsthat, at this time, the business districts with more people mayhave higher power demand than residential districts. However,more energy is transported to the business districts by EVs.This transported energy can be used to satisfy the local highdemand. Hence, EVs not only have the ability to provide DRMin local area, but also have the potential to achieve demandbalance among different areas. Different districts are inter-linked by EV mobility. Therefore, in this paper, we investigatethe DRM with EV mobility by exploring the complex networktheory.
The complex network theory is used to describe systemswith complicated dynamical behaviors [30], including theInternet, social networks and transportation networks. Syn-chronization of complex network shows a particular form ofdynamical behavior in the coupled networks [31], [32]. Eachnode in network is a dynamic subsystem. Then, all nodes,coupled with each other, will behave in the similar fashion.We employ the complex network synchronization to explorethe potential ability of EV mobility to balance power demand.We define the dynamic complex network model of the V2Gmobile energy networks. Nodes are denoted by districts. Eachdistrict is a V2G subsystem. Nodes are linked by EV fleets.EVs act as energy transporters and their mobilities will impactthe DRM among districts.
In this paper, we focus on the fundamental issue on explor-ing EVs mobility to balance power demand among districts inthe smart grid. We start with the analysis of typical scenariosthat leads to the model of V2G mobile energy networks. Eachdistrict has a V2G system to aggregate the local EV batteriesfor DRM. EV fleets travel across different districts, actingas energy transporters to impact the DRM. A set of stateequations is formulated to model the DRM dynamics of eachdistrict. In addition, complex network synchronization methodis proposed to analyze the dynamic behavior in V2G mobileenergy network. Numerical results show that EVs mobility isable to balance the power demand in a smart grid by achieving
EV fleets
Battery pools
District 1
District 2
District 3
District N
Fig. 1. V2G mobile energy network.
synchronous stability of network. This observation is alsovalidated by simulation with real world data. There are threemajor contributions in this paper.
• We propose a new network model of V2G mobile energynetworks to demonstrate the roles of EVs as both flexibleenergy storages and energy transporters.
• The V2G mobile energy network is built to describe theenergy relationship among different districts by applyingthe dynamical complex networks approach. We also studythat EVs have the ability to balance power demand amongdistricts in the smart grid.
• We leverage the synchronization of complex network toanalyze the dynamic behavior of V2G mobile energy net-work. The demand level synchronous stability is analyzedand the condition for synchronous stability is derived.
The rest of this paper is organized as follows. SectionII illustrates the model of V2G mobile energy network andintroduces the EV energy transportation. In Section III, wepresent the formulation of DRM dynamics. In Section IV,the problem analysis of demand balance is provided by usingthe complex network synchronization. In Section V, numericalresults are illustrated to show the EV fleet effect on DRM. Realdata is employed in the simulations. Conclusion and futurework are presented in Section VI.
II. SYSTEM MODEL
A. V2G Mobile Energy Network
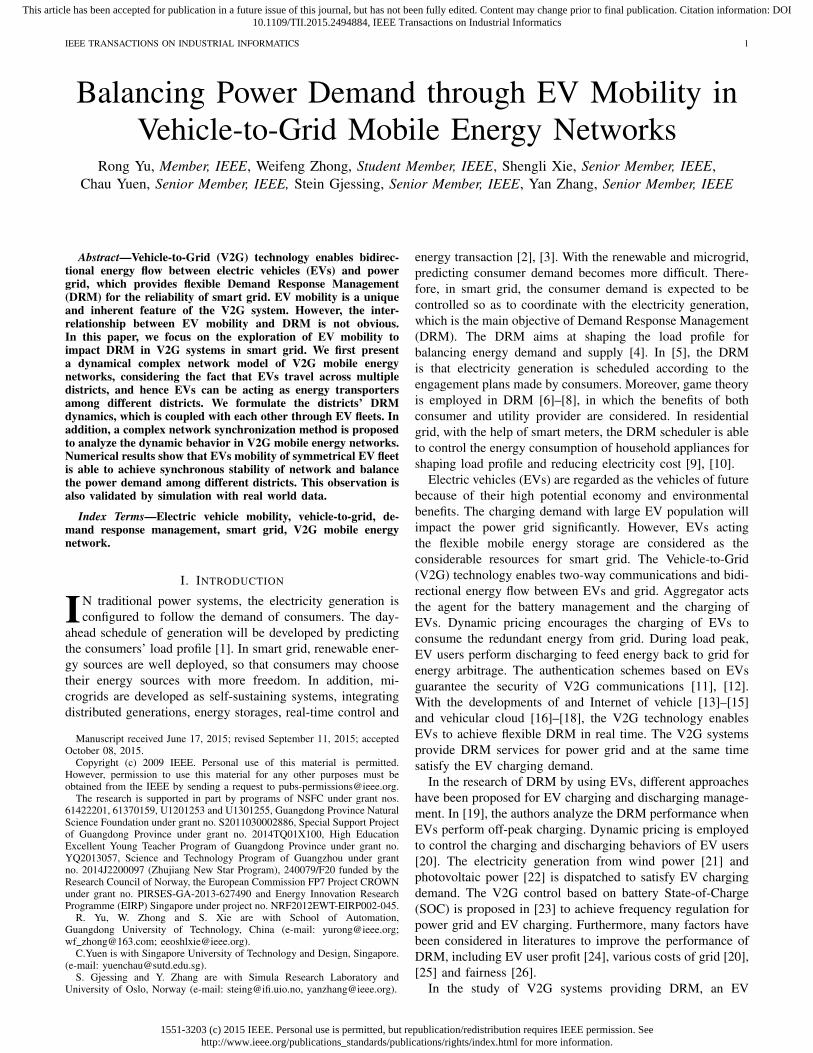
Fig. 1 shows the V2G mobile energy networks consideringEV mobility to impact the DRM in V2G systems. Districtsare denoted by nodes in the network, and the nodes are linkedby the EV fleets.
Different districts have different daily electricity load pro-files [33]. For example, load peak usually occurs in the eveningin residential districts. The load level may stay high in alldaytime in central business districts. This daily load fluctuationin each district can be mitigated by adopting DRM to controlthe charging and discharging of local EVs in V2G system.Each district has a V2G system to enable the bidirectionalenergy flow among EVs and grid. By implementing price
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 3
control in the V2G system, EVs can share their energy witheach other, buy energy from grid, or sell energy to grid. Inone district, all parked EVs are connected to the local V2Gsystem and aggregated as a large energy storage, which iscalled battery pool as shown in Fig. 1. In [34], the conceptof V2G pool is proposed. The V2G pool as a battery energystorage system, consists of a number of available EVs andprovides services to power grid so as to balance the powerfluctuation. The difference between the concepts of batterypool and V2G pool is that the SOC of battery pool changeswith the electricity price while that of V2G pool does not.
The battery pool is the powerful tool for DRM. However,the battery pool’s size and SOC will change dynamically dueto EVs’ activities. In this paper, we consider two differenttypes of activity, (i) local EV activity within one districtand (ii) mobile EV activity due to the EV fleets amongdifferent districts. The EV fleets, equipped with batteries,can be regarded as the energy transporters. Energy can betransmitted by EV fleets from one district to another. In thenext subsection, we present the mechanism on how EVs cantransport energy, and how the energy transportation impactsDRM in V2G systems.
B. Energy Transportation by EVs
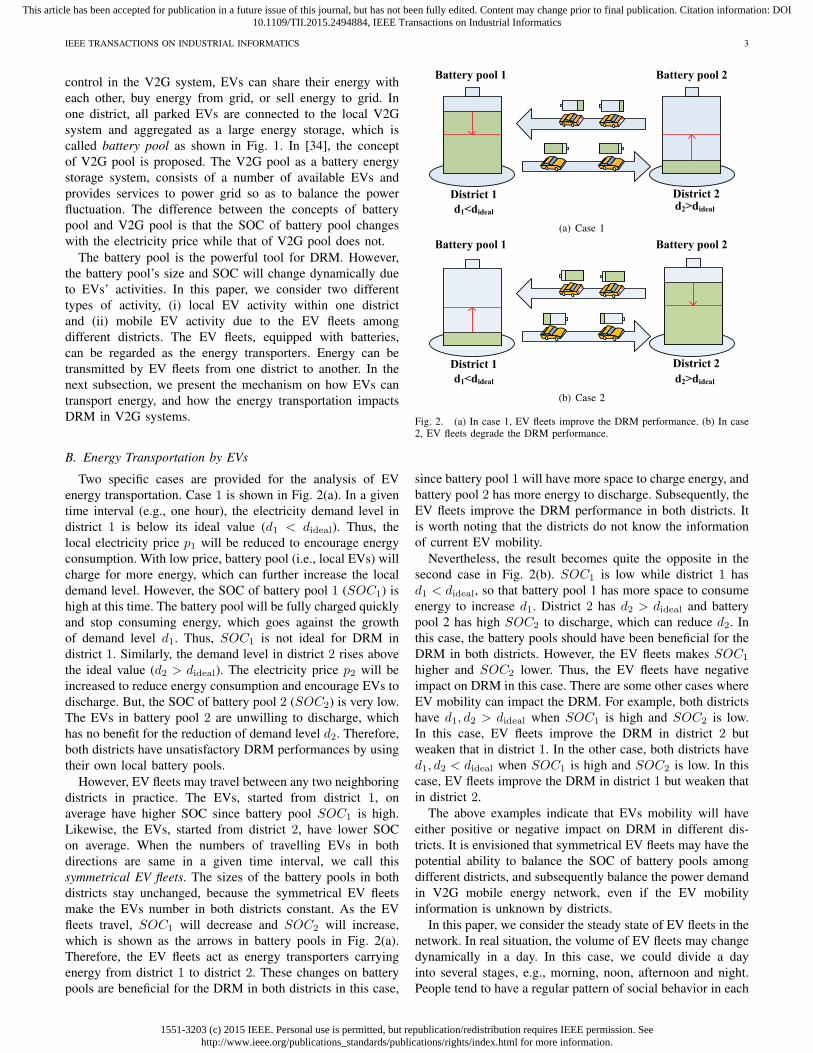
Two specific cases are provided for the analysis of EVenergy transportation. Case 1 is shown in Fig. 2(a). In a giventime interval (e.g., one hour), the electricity demand level indistrict 1 is below its ideal value (d1 < dideal). Thus, thelocal electricity price p1 will be reduced to encourage energyconsumption. With low price, battery pool (i.e., local EVs) willcharge for more energy, which can further increase the localdemand level. However, the SOC of battery pool 1 (SOC1) ishigh at this time. The battery pool will be fully charged quicklyand stop consuming energy, which goes against the growthof demand level d1. Thus, SOC1 is not ideal for DRM indistrict 1. Similarly, the demand level in district 2 rises abovethe ideal value (d2 > dideal). The electricity price p2 will beincreased to reduce energy consumption and encourage EVs todischarge. But, the SOC of battery pool 2 (SOC2) is very low.The EVs in battery pool 2 are unwilling to discharge, whichhas no benefit for the reduction of demand level d2. Therefore,both districts have unsatisfactory DRM performances by usingtheir own local battery pools.
However, EV fleets may travel between any two neighboringdistricts in practice. The EVs, started from district 1, onaverage have higher SOC since battery pool SOC1 is high.Likewise, the EVs, started from district 2, have lower SOCon average. When the numbers of travelling EVs in bothdirections are same in a given time interval, we call thissymmetrical EV fleets. The sizes of the battery pools in bothdistricts stay unchanged, because the symmetrical EV fleetsmake the EVs number in both districts constant. As the EVfleets travel, SOC1 will decrease and SOC2 will increase,which is shown as the arrows in battery pools in Fig. 2(a).Therefore, the EV fleets act as energy transporters carryingenergy from district 1 to district 2. These changes on batterypools are beneficial for the DRM in both districts in this case,
�����������
� ��� ���� � ��� ����
�����������
���� ��� ���� ���
(a) Case 1
�����������
� ��� ���� � ��� ����
�����������
���� ��� ���� ���
(b) Case 2
Fig. 2. (a) In case 1, EV fleets improve the DRM performance. (b) In case2, EV fleets degrade the DRM performance.
since battery pool 1 will have more space to charge energy, andbattery pool 2 has more energy to discharge. Subsequently, theEV fleets improve the DRM performance in both districts. Itis worth noting that the districts do not know the informationof current EV mobility.
Nevertheless, the result becomes quite the opposite in thesecond case in Fig. 2(b). SOC1 is low while district 1 hasd1 < dideal, so that battery pool 1 has more space to consumeenergy to increase d1. District 2 has d2 > dideal and batterypool 2 has high SOC2 to discharge, which can reduce d2. Inthis case, the battery pools should have been beneficial for theDRM in both districts. However, the EV fleets makes SOC1
higher and SOC2 lower. Thus, the EV fleets have negativeimpact on DRM in this case. There are some other cases whereEV mobility can impact the DRM. For example, both districtshave d1, d2 > dideal when SOC1 is high and SOC2 is low.In this case, EV fleets improve the DRM in district 2 butweaken that in district 1. In the other case, both districts haved1, d2 < dideal when SOC1 is high and SOC2 is low. In thiscase, EV fleets improve the DRM in district 1 but weaken thatin district 2.
The above examples indicate that EVs mobility will haveeither positive or negative impact on DRM in different dis-tricts. It is envisioned that symmetrical EV fleets may have thepotential ability to balance the SOC of battery pools amongdifferent districts, and subsequently balance the power demandin V2G mobile energy network, even if the EV mobilityinformation is unknown by districts.
In this paper, we consider the steady state of EV fleets in thenetwork. In real situation, the volume of EV fleets may changedynamically in a day. In this case, we could divide a dayinto several stages, e.g., morning, noon, afternoon and night.People tend to have a regular pattern of social behavior in each
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 4
0 5 10 1575
80
85
90
95
100
Time
Dem
and
leve
l (%
)
(a)
0 5 10 15
22
24
26
Time
Pric
e
(b)
0 5 10 1560
70
80
90
100
Time
Bat
tery
poo
l SO
C (
%)
(c)
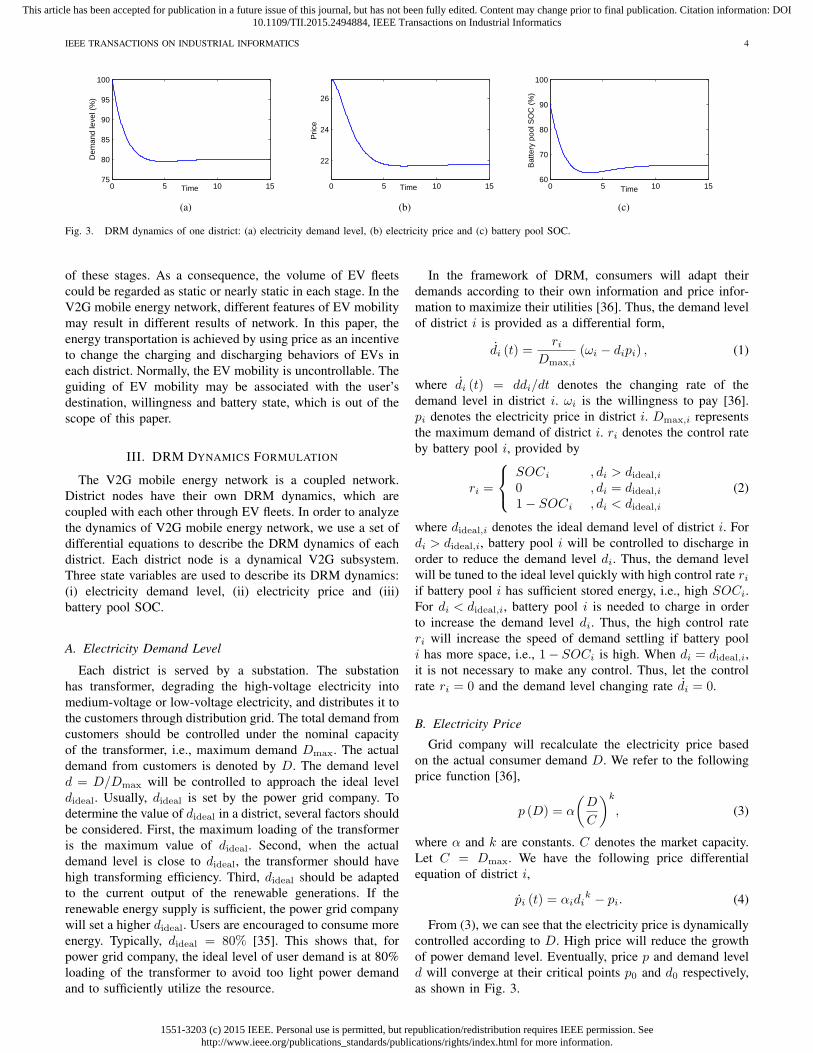
Fig. 3. DRM dynamics of one district: (a) electricity demand level, (b) electricity price and (c) battery pool SOC.
of these stages. As a consequence, the volume of EV fleetscould be regarded as static or nearly static in each stage. In theV2G mobile energy network, different features of EV mobilitymay result in different results of network. In this paper, theenergy transportation is achieved by using price as an incentiveto change the charging and discharging behaviors of EVs ineach district. Normally, the EV mobility is uncontrollable. Theguiding of EV mobility may be associated with the user’sdestination, willingness and battery state, which is out of thescope of this paper.
III. DRM DYNAMICS FORMULATION
The V2G mobile energy network is a coupled network.District nodes have their own DRM dynamics, which arecoupled with each other through EV fleets. In order to analyzethe dynamics of V2G mobile energy network, we use a set ofdifferential equations to describe the DRM dynamics of eachdistrict. Each district node is a dynamical V2G subsystem.Three state variables are used to describe its DRM dynamics:(i) electricity demand level, (ii) electricity price and (iii)battery pool SOC.
A. Electricity Demand Level
Each district is served by a substation. The substationhas transformer, degrading the high-voltage electricity intomedium-voltage or low-voltage electricity, and distributes it tothe customers through distribution grid. The total demand fromcustomers should be controlled under the nominal capacityof the transformer, i.e., maximum demand Dmax. The actualdemand from customers is denoted by D. The demand leveld = D/Dmax will be controlled to approach the ideal leveldideal. Usually, dideal is set by the power grid company. Todetermine the value of dideal in a district, several factors shouldbe considered. First, the maximum loading of the transformeris the maximum value of dideal. Second, when the actualdemand level is close to dideal, the transformer should havehigh transforming efficiency. Third, dideal should be adaptedto the current output of the renewable generations. If therenewable energy supply is sufficient, the power grid companywill set a higher dideal. Users are encouraged to consume moreenergy. Typically, dideal = 80% [35]. This shows that, forpower grid company, the ideal level of user demand is at 80%loading of the transformer to avoid too light power demandand to sufficiently utilize the resource.
In the framework of DRM, consumers will adapt theirdemands according to their own information and price infor-mation to maximize their utilities [36]. Thus, the demand levelof district i is provided as a differential form,
di (t) =ri
Dmax,i(ωi − dipi) , (1)
where di (t) = ddi/dt denotes the changing rate of thedemand level in district i. ωi is the willingness to pay [36].pi denotes the electricity price in district i. Dmax,i representsthe maximum demand of district i. ri denotes the control rateby battery pool i, provided by
ri =
SOCi
01− SOCi
, di > dideal,i, di = dideal,i, di < dideal,i
(2)
where dideal,i denotes the ideal demand level of district i. Fordi > dideal,i, battery pool i will be controlled to discharge inorder to reduce the demand level di. Thus, the demand levelwill be tuned to the ideal level quickly with high control rate riif battery pool i has sufficient stored energy, i.e., high SOCi.For di < dideal,i, battery pool i is needed to charge in orderto increase the demand level di. Thus, the high control rateri will increase the speed of demand settling if battery pooli has more space, i.e., 1− SOCi is high. When di = dideal,i,it is not necessary to make any control. Thus, let the controlrate ri = 0 and the demand level changing rate di = 0.
B. Electricity Price
Grid company will recalculate the electricity price basedon the actual consumer demand D. We refer to the followingprice function [36],
p (D) = α
(D
C
)k
, (3)
where α and k are constants. C denotes the market capacity.Let C = Dmax. We have the following price differentialequation of district i,
pi (t) = αidik − pi. (4)
From (3), we can see that the electricity price is dynamicallycontrolled according to D. High price will reduce the growthof power demand level. Eventually, price p and demand leveld will converge at their critical points p0 and d0 respectively,as shown in Fig. 3.
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 5
C. SOC of Battery Pool
In a given time interval, the symmetrical EV fleets do notchange the sizes of all battery pools. However, their SOCdynamically changes with local EV activity and mobile EVactivity. Let si = SOCi, we have the following equation ofbattery pool SOC in district i,
si (t) = slocal,i + smobile,i
= ai − bipisi + c
N∑j=1
Gijsj ,(5)
where slocal,i denotes the local changing rate of battery poolSOC, which is caused by the usage of EV batteries withinone district. The EV battery consuming and charging modelsare mainly reflected in the definition of the SOC of battery,which is highly related to user’s willingness in charging anddischarging. When an EV has high SOC and the current priceis high, the EV user is willing to discharge energy in EVbattery. Then the EV user will stop discharging after reachingthe critical SOC value s0. On the contrary, if an EV has lowSOC and current price is low, the EV user tends to charge theEV battery. After the SOC reaches critical value s0, the EVuser has sufficient energy for EV usage and stops charging.Therefore, in our model, the value of s0 is tightly connectedto the electricity price. Specifically, in (5),the item slocal,i =ai − bipisi is used to describe the local changing rate of theSOC of battery pool. ai and bi are constant parameters indistrict i. This differential equation will make battery poolSOC converge to a critical point s0 = ai/bip0.
Fig. 3 shows a converged situation of the three state vari-ables of DRM in one district. At the beginning, high demandlevel causes high price, which makes EV users dischargebatteries for profit. Thus, the battery pool SOC is decreasing.Then, price is stable with demand level. Battery pool SOCstops decreasing and stabilizes with price.
In (5), smobile,i denotes the changing rate of battery poolSOC, which is caused by the energy transportation of EVfleets. c denotes the average battery size of one EV. N denotesthe total number of districts. The SOC of EVs started fromdistrict j is averagely equal to the SOC of battery pool j. Thus,we use sj to present the SOC of EVs started from district j.Gij represents the arrival rate of the EV fleets from district jto district i. G is the EV fleet arrival rate matrix, shown by
G =
G11 G12 · · · G1N
G21 G22 · · · G2N
......
. . ....
GN1 GN2 · · · GNN
, (6)
which is a N ×N symmetrical matrix for symmetrical EVfleets, i.e., Gij = Gji, j = i. If there are EV fleets travelingbetween any two districts in both directions, the V2G mobileenergy network is a complete graph. The diagonal elementsare negative and denote the rates of outgoing EV fleets fromdistrict i. We have Gii = −
∑Nj =i Gij = −
∑Nj =i Gji.
According to (1), (4) and (5), the set of state equations
68 68.2 68.4 68.6 68.8 69 69.2 69.4 69.6
−0.02
0
0.02
0.04
0.06
0.08
γm
Max
imum
Lya
puno
v ex
pone
nt
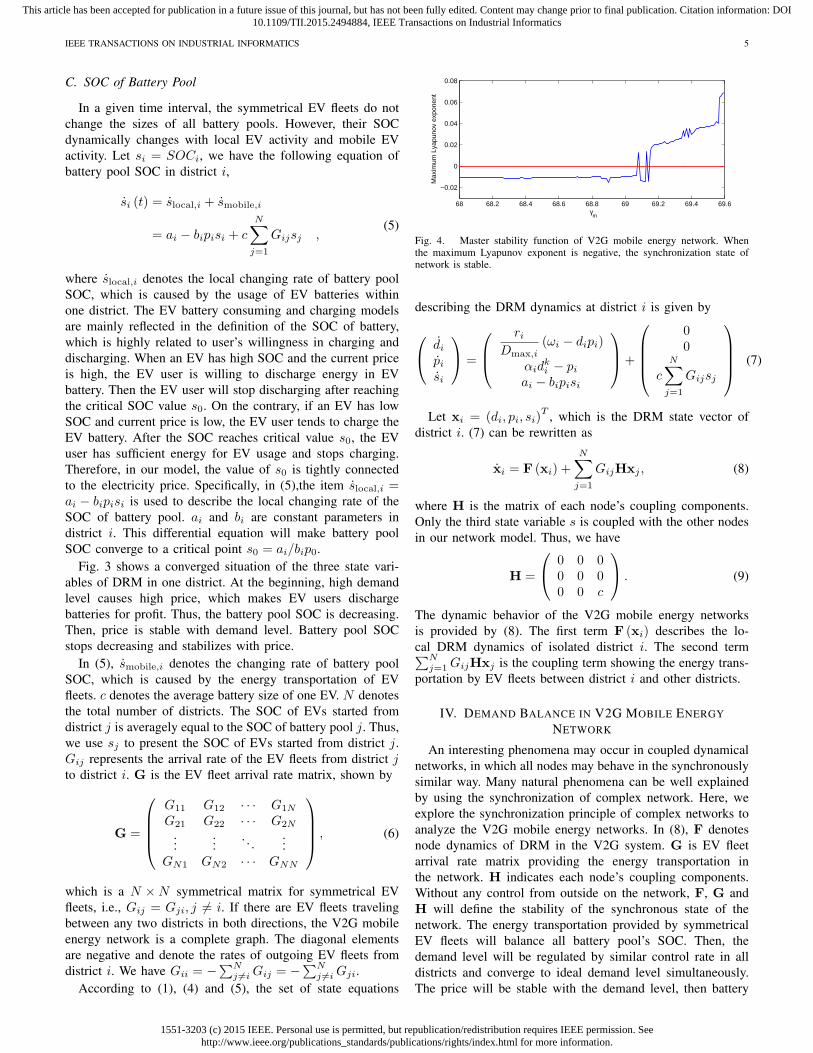
Fig. 4. Master stability function of V2G mobile energy network. Whenthe maximum Lyapunov exponent is negative, the synchronization state ofnetwork is stable.
describing the DRM dynamics at district i is given by
dipisi
=
ri
Dmax,i(ωi − dipi)
αidki − pi
ai − bipisi
+
00
c
N∑j=1
Gijsj
(7)
Let xi = (di, pi, si)T , which is the DRM state vector of
district i. (7) can be rewritten as
xi = F (xi) +N∑j=1
GijHxj , (8)
where H is the matrix of each node’s coupling components.Only the third state variable s is coupled with the other nodesin our network model. Thus, we have
H =
0 0 00 0 00 0 c
. (9)
The dynamic behavior of the V2G mobile energy networksis provided by (8). The first term F (xi) describes the lo-cal DRM dynamics of isolated district i. The second term∑N
j=1 GijHxj is the coupling term showing the energy trans-portation by EV fleets between district i and other districts.
IV. DEMAND BALANCE IN V2G MOBILE ENERGYNETWORK
An interesting phenomena may occur in coupled dynamicalnetworks, in which all nodes may behave in the synchronouslysimilar way. Many natural phenomena can be well explainedby using the synchronization of complex network. Here, weexplore the synchronization principle of complex networks toanalyze the V2G mobile energy networks. In (8), F denotesnode dynamics of DRM in the V2G system. G is EV fleetarrival rate matrix providing the energy transportation inthe network. H indicates each node’s coupling components.Without any control from outside on the network, F, G andH will define the stability of the synchronous state of thenetwork. The energy transportation provided by symmetricalEV fleets will balance all battery pool’s SOC. Then, thedemand level will be regulated by similar control rate in alldistricts and converge to ideal demand level simultaneously.The price will be stable with the demand level, then battery
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 6
0 5 10 1560
65
70
75
80
85
90
95
100
Time
Dem
and
leve
l (%
)
district 1district 2district 3district 4
(a)
0 5 10 1560
65
70
75
80
85
90
95
100
Time
Dem
and
leve
l (%
)
district 1district 2district 3district 4
(b)
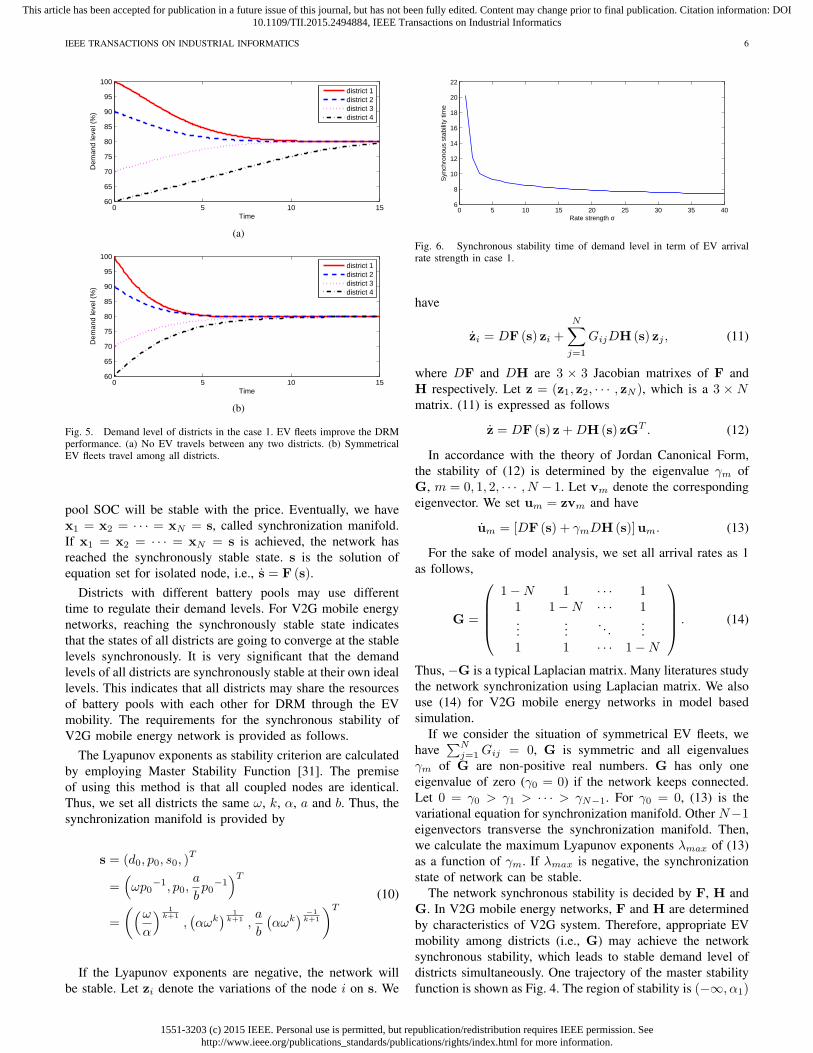
Fig. 5. Demand level of districts in the case 1. EV fleets improve the DRMperformance. (a) No EV travels between any two districts. (b) SymmetricalEV fleets travel among all districts.
pool SOC will be stable with the price. Eventually, we havex1 = x2 = · · · = xN = s, called synchronization manifold.If x1 = x2 = · · · = xN = s is achieved, the network hasreached the synchronously stable state. s is the solution ofequation set for isolated node, i.e., s = F (s).
Districts with different battery pools may use differenttime to regulate their demand levels. For V2G mobile energynetworks, reaching the synchronously stable state indicatesthat the states of all districts are going to converge at the stablelevels synchronously. It is very significant that the demandlevels of all districts are synchronously stable at their own ideallevels. This indicates that all districts may share the resourcesof battery pools with each other for DRM through the EVmobility. The requirements for the synchronous stability ofV2G mobile energy network is provided as follows.
The Lyapunov exponents as stability criterion are calculatedby employing Master Stability Function [31]. The premiseof using this method is that all coupled nodes are identical.Thus, we set all districts the same ω, k, α, a and b. Thus, thesynchronization manifold is provided by
s = (d0, p0, s0, )T
=(ωp0
−1, p0,a
bp0
−1)T
=
((ωα
) 1k+1
,(αωk
) 1k+1 ,
a
b
(αωk
) −1k+1
)T
(10)
If the Lyapunov exponents are negative, the network willbe stable. Let zi denote the variations of the node i on s. We
0 5 10 15 20 25 30 35 406
8
10
12
14
16
18
20
22
Rate strength σ
Syn
chro
nous
sta
bilit
y tim
e
Fig. 6. Synchronous stability time of demand level in term of EV arrivalrate strength in case 1.
have
zi = DF (s) zi +N∑j=1
GijDH (s) zj , (11)
where DF and DH are 3 × 3 Jacobian matrixes of F andH respectively. Let z = (z1, z2, · · · , zN ), which is a 3 × Nmatrix. (11) is expressed as follows
z = DF (s) z+DH (s) zGT . (12)
In accordance with the theory of Jordan Canonical Form,the stability of (12) is determined by the eigenvalue γm ofG, m = 0, 1, 2, · · · , N − 1. Let vm denote the correspondingeigenvector. We set um = zvm and have
um = [DF (s) + γmDH (s)]um. (13)
For the sake of model analysis, we set all arrival rates as 1as follows,
G =
1−N 1 · · · 1
1 1−N · · · 1...
.... . .
...1 1 · · · 1−N
. (14)
Thus, −G is a typical Laplacian matrix. Many literatures studythe network synchronization using Laplacian matrix. We alsouse (14) for V2G mobile energy networks in model basedsimulation.
If we consider the situation of symmetrical EV fleets, wehave
∑Nj=1 Gij = 0, G is symmetric and all eigenvalues
γm of G are non-positive real numbers. G has only oneeigenvalue of zero (γ0 = 0) if the network keeps connected.Let 0 = γ0 > γ1 > · · · > γN−1. For γ0 = 0, (13) is thevariational equation for synchronization manifold. Other N−1eigenvectors transverse the synchronization manifold. Then,we calculate the maximum Lyapunov exponents λmax of (13)as a function of γm. If λmax is negative, the synchronizationstate of network can be stable.
The network synchronous stability is decided by F, H andG. In V2G mobile energy networks, F and H are determinedby characteristics of V2G system. Therefore, appropriate EVmobility among districts (i.e., G) may achieve the networksynchronous stability, which leads to stable demand level ofdistricts simultaneously. One trajectory of the master stabilityfunction is shown as Fig. 4. The region of stability is (−∞, α1)
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 7
0 5 10 1560
65
70
75
80
85
90
95
100
Time
Dem
and
leve
l (%
)
district 1district 2district 3district 4
(a)
0 5 10 1560
65
70
75
80
85
90
95
100
Time
Dem
and
leve
l (%
)
district 1district 2district 3district 4
(b)
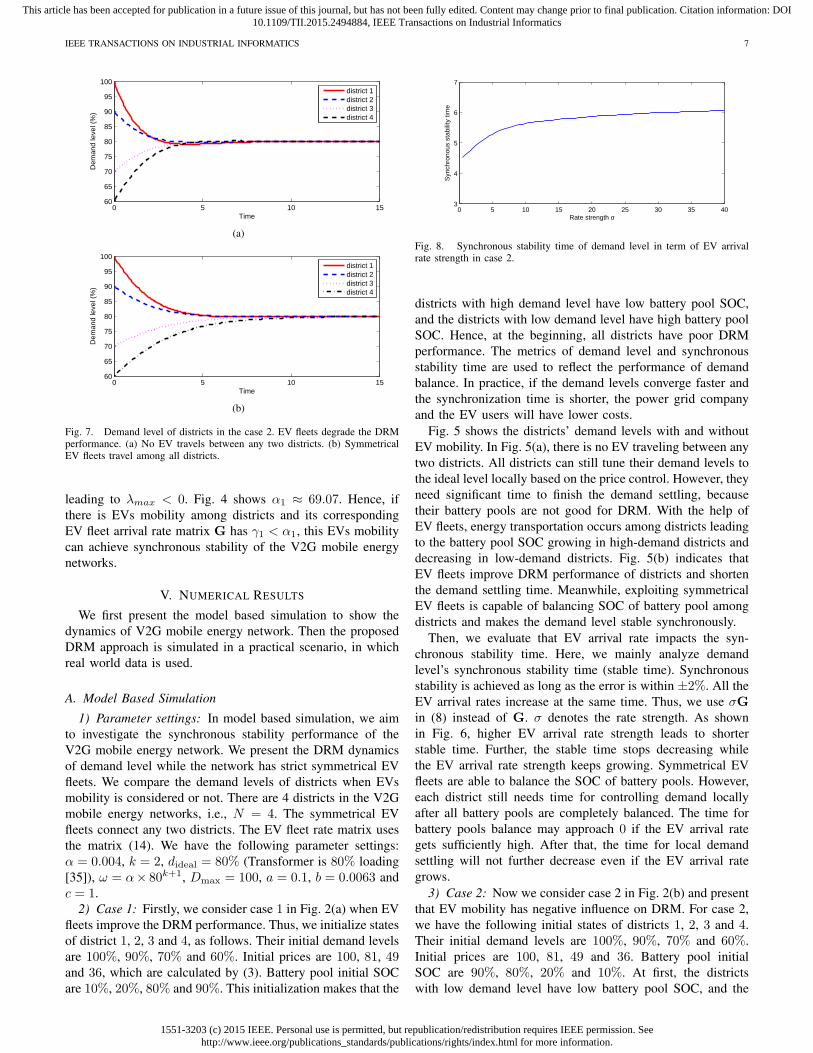
Fig. 7. Demand level of districts in the case 2. EV fleets degrade the DRMperformance. (a) No EV travels between any two districts. (b) SymmetricalEV fleets travel among all districts.
leading to λmax < 0. Fig. 4 shows α1 ≈ 69.07. Hence, ifthere is EVs mobility among districts and its correspondingEV fleet arrival rate matrix G has γ1 < α1, this EVs mobilitycan achieve synchronous stability of the V2G mobile energynetworks.
V. NUMERICAL RESULTS
We first present the model based simulation to show thedynamics of V2G mobile energy network. Then the proposedDRM approach is simulated in a practical scenario, in whichreal world data is used.
A. Model Based Simulation
1) Parameter settings: In model based simulation, we aimto investigate the synchronous stability performance of theV2G mobile energy network. We present the DRM dynamicsof demand level while the network has strict symmetrical EVfleets. We compare the demand levels of districts when EVsmobility is considered or not. There are 4 districts in the V2Gmobile energy networks, i.e., N = 4. The symmetrical EVfleets connect any two districts. The EV fleet rate matrix usesthe matrix (14). We have the following parameter settings:α = 0.004, k = 2, dideal = 80% (Transformer is 80% loading[35]), ω = α× 80k+1, Dmax = 100, a = 0.1, b = 0.0063 andc = 1.
2) Case 1: Firstly, we consider case 1 in Fig. 2(a) when EVfleets improve the DRM performance. Thus, we initialize statesof district 1, 2, 3 and 4, as follows. Their initial demand levelsare 100%, 90%, 70% and 60%. Initial prices are 100, 81, 49and 36, which are calculated by (3). Battery pool initial SOCare 10%, 20%, 80% and 90%. This initialization makes that the
0 5 10 15 20 25 30 35 403
4
5
6
7
Rate strength σ
Syn
chro
nous
sta
bilit
y tim
e
Fig. 8. Synchronous stability time of demand level in term of EV arrivalrate strength in case 2.
districts with high demand level have low battery pool SOC,and the districts with low demand level have high battery poolSOC. Hence, at the beginning, all districts have poor DRMperformance. The metrics of demand level and synchronousstability time are used to reflect the performance of demandbalance. In practice, if the demand levels converge faster andthe synchronization time is shorter, the power grid companyand the EV users will have lower costs.
Fig. 5 shows the districts’ demand levels with and withoutEV mobility. In Fig. 5(a), there is no EV traveling between anytwo districts. All districts can still tune their demand levels tothe ideal level locally based on the price control. However, theyneed significant time to finish the demand settling, becausetheir battery pools are not good for DRM. With the help ofEV fleets, energy transportation occurs among districts leadingto the battery pool SOC growing in high-demand districts anddecreasing in low-demand districts. Fig. 5(b) indicates thatEV fleets improve DRM performance of districts and shortenthe demand settling time. Meanwhile, exploiting symmetricalEV fleets is capable of balancing SOC of battery pool amongdistricts and makes the demand level stable synchronously.
Then, we evaluate that EV arrival rate impacts the syn-chronous stability time. Here, we mainly analyze demandlevel’s synchronous stability time (stable time). Synchronousstability is achieved as long as the error is within ±2%. All theEV arrival rates increase at the same time. Thus, we use σGin (8) instead of G. σ denotes the rate strength. As shownin Fig. 6, higher EV arrival rate strength leads to shorterstable time. Further, the stable time stops decreasing whilethe EV arrival rate strength keeps growing. Symmetrical EVfleets are able to balance the SOC of battery pools. However,each district still needs time for controlling demand locallyafter all battery pools are completely balanced. The time forbattery pools balance may approach 0 if the EV arrival rategets sufficiently high. After that, the time for local demandsettling will not further decrease even if the EV arrival rategrows.
3) Case 2: Now we consider case 2 in Fig. 2(b) and presentthat EV mobility has negative influence on DRM. For case 2,we have the following initial states of districts 1, 2, 3 and 4.Their initial demand levels are 100%, 90%, 70% and 60%.Initial prices are 100, 81, 49 and 36. Battery pool initialSOC are 90%, 80%, 20% and 10%. At first, the districtswith low demand level have low battery pool SOC, and the
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 8
11 22
4433 55
66 77 88
99
1010 1111 1212
1313 1414
S2S2 S3S3S1S1Main
grid
Main
grid
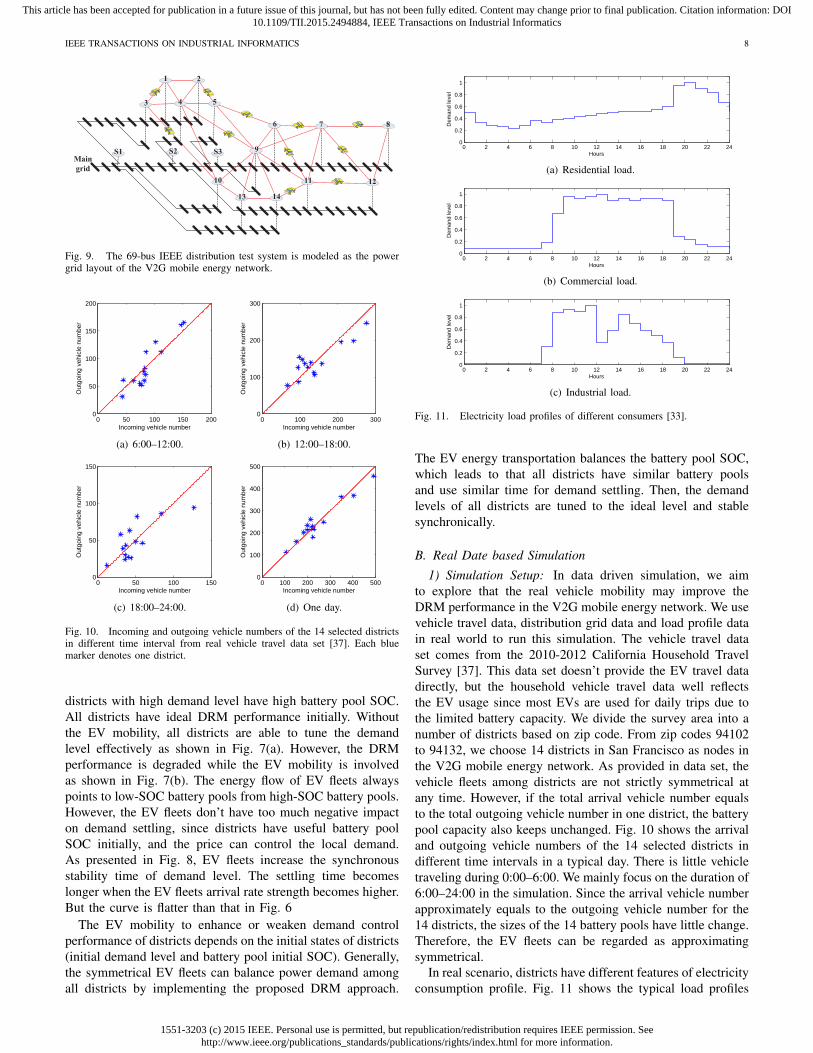
Fig. 9. The 69-bus IEEE distribution test system is modeled as the powergrid layout of the V2G mobile energy network.
0 50 100 150 2000
50
100
150
200
Incoming vehicle number
Out
goin
g ve
hicl
e nu
mbe
r
(a) 6:00–12:00.
0 100 200 3000
100
200
300
Incoming vehicle number
Out
goin
g ve
hicl
e nu
mbe
r
(b) 12:00–18:00.
0 50 100 1500
50
100
150
Incoming vehicle number
Out
goin
g ve
hicl
e nu
mbe
r
(c) 18:00–24:00.
0 100 200 300 400 5000
100
200
300
400
500
Incoming vehicle number
Out
goin
g ve
hicl
e nu
mbe
r
(d) One day.
Fig. 10. Incoming and outgoing vehicle numbers of the 14 selected districtsin different time interval from real vehicle travel data set [37]. Each bluemarker denotes one district.
districts with high demand level have high battery pool SOC.All districts have ideal DRM performance initially. Withoutthe EV mobility, all districts are able to tune the demandlevel effectively as shown in Fig. 7(a). However, the DRMperformance is degraded while the EV mobility is involvedas shown in Fig. 7(b). The energy flow of EV fleets alwayspoints to low-SOC battery pools from high-SOC battery pools.However, the EV fleets don’t have too much negative impacton demand settling, since districts have useful battery poolSOC initially, and the price can control the local demand.As presented in Fig. 8, EV fleets increase the synchronousstability time of demand level. The settling time becomeslonger when the EV fleets arrival rate strength becomes higher.But the curve is flatter than that in Fig. 6
The EV mobility to enhance or weaken demand controlperformance of districts depends on the initial states of districts(initial demand level and battery pool initial SOC). Generally,the symmetrical EV fleets can balance power demand amongall districts by implementing the proposed DRM approach.
0 2 4 6 8 10 12 14 16 18 20 22 240
0.2
0.4
0.6
0.8
1
Hours
Dem
and
leve
l
(a) Residential load.
0 2 4 6 8 10 12 14 16 18 20 22 240
0.2
0.4
0.6
0.8
1
Hours
Dem
and
leve
l
(b) Commercial load.
0 2 4 6 8 10 12 14 16 18 20 22 240
0.2
0.4
0.6
0.8
1
Hours
Dem
and
leve
l
(c) Industrial load.
Fig. 11. Electricity load profiles of different consumers [33].
The EV energy transportation balances the battery pool SOC,which leads to that all districts have similar battery poolsand use similar time for demand settling. Then, the demandlevels of all districts are tuned to the ideal level and stablesynchronically.
B. Real Date based Simulation
1) Simulation Setup: In data driven simulation, we aimto explore that the real vehicle mobility may improve theDRM performance in the V2G mobile energy network. We usevehicle travel data, distribution grid data and load profile datain real world to run this simulation. The vehicle travel dataset comes from the 2010-2012 California Household TravelSurvey [37]. This data set doesn’t provide the EV travel datadirectly, but the household vehicle travel data well reflectsthe EV usage since most EVs are used for daily trips due tothe limited battery capacity. We divide the survey area into anumber of districts based on zip code. From zip codes 94102to 94132, we choose 14 districts in San Francisco as nodes inthe V2G mobile energy network. As provided in data set, thevehicle fleets among districts are not strictly symmetrical atany time. However, if the total arrival vehicle number equalsto the total outgoing vehicle number in one district, the batterypool capacity also keeps unchanged. Fig. 10 shows the arrivaland outgoing vehicle numbers of the 14 selected districts indifferent time intervals in a typical day. There is little vehicletraveling during 0:00–6:00. We mainly focus on the duration of6:00–24:00 in the simulation. Since the arrival vehicle numberapproximately equals to the outgoing vehicle number for the14 districts, the sizes of the 14 battery pools have little change.Therefore, the EV fleets can be regarded as approximatingsymmetrical.
In real scenario, districts have different features of electricityconsumption profile. Fig. 11 shows the typical load profiles
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 9
1 2 3 4 5 6 7 8 9 10 11 12 13 14 S3 S2 S10
2
4
6
8
10
12
14
Node numbers
Dem
and
settl
ing
time
without EV fleetwith EV fleets
(a) Demand settling time of the selected network nodes.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 S3 S2 S10
20
40
60
80
100
Node numbers
Grid
ope
ratio
n co
st
without EV fleetwith EV fleets
(b) Grid operation cost of the selected network nodes.
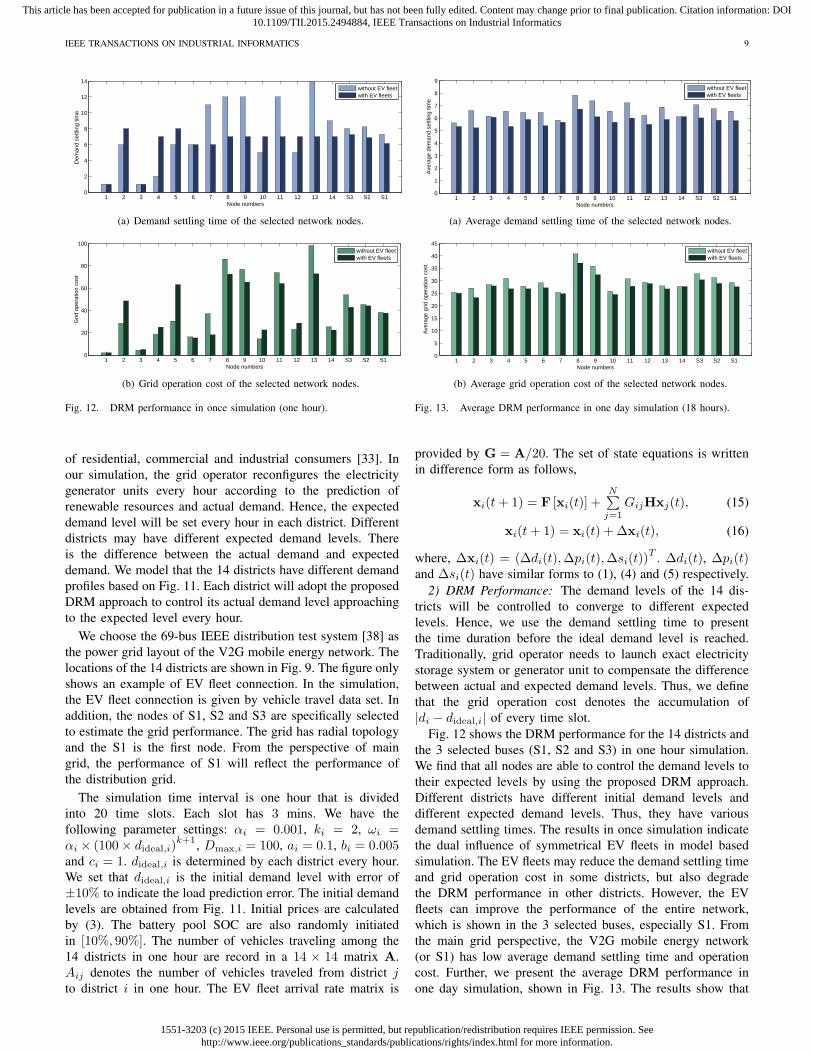
Fig. 12. DRM performance in once simulation (one hour).
of residential, commercial and industrial consumers [33]. Inour simulation, the grid operator reconfigures the electricitygenerator units every hour according to the prediction ofrenewable resources and actual demand. Hence, the expecteddemand level will be set every hour in each district. Differentdistricts may have different expected demand levels. Thereis the difference between the actual demand and expecteddemand. We model that the 14 districts have different demandprofiles based on Fig. 11. Each district will adopt the proposedDRM approach to control its actual demand level approachingto the expected level every hour.
We choose the 69-bus IEEE distribution test system [38] asthe power grid layout of the V2G mobile energy network. Thelocations of the 14 districts are shown in Fig. 9. The figure onlyshows an example of EV fleet connection. In the simulation,the EV fleet connection is given by vehicle travel data set. Inaddition, the nodes of S1, S2 and S3 are specifically selectedto estimate the grid performance. The grid has radial topologyand the S1 is the first node. From the perspective of maingrid, the performance of S1 will reflect the performance ofthe distribution grid.
The simulation time interval is one hour that is dividedinto 20 time slots. Each slot has 3 mins. We have thefollowing parameter settings: αi = 0.001, ki = 2, ωi =αi × (100× dideal,i)
k+1, Dmax,i = 100, ai = 0.1, bi = 0.005and ci = 1. dideal,i is determined by each district every hour.We set that dideal,i is the initial demand level with error of±10% to indicate the load prediction error. The initial demandlevels are obtained from Fig. 11. Initial prices are calculatedby (3). The battery pool SOC are also randomly initiatedin [10%, 90%]. The number of vehicles traveling among the14 districts in one hour are record in a 14 × 14 matrix A.Aij denotes the number of vehicles traveled from district jto district i in one hour. The EV fleet arrival rate matrix is
1 2 3 4 5 6 7 8 9 10 11 12 13 14 S3 S2 S10
1
2
3
4
5
6
7
8
9
Node numbers
Ave
rage
dem
and
settl
ing
time
without EV fleetwith EV fleets
(a) Average demand settling time of the selected network nodes.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 S3 S2 S10
5
10
15
20
25
30
35
40
45
Node numbers
Ave
rage
grid
ope
ratio
n co
st
without EV fleetwith EV fleets
(b) Average grid operation cost of the selected network nodes.
Fig. 13. Average DRM performance in one day simulation (18 hours).
provided by G = A/20. The set of state equations is writtenin difference form as follows,
xi(t+ 1) = F [xi(t)] +N∑j=1
GijHxj(t), (15)
xi(t+ 1) = xi(t) + ∆xi(t), (16)
where, ∆xi(t) = (∆di(t),∆pi(t),∆si(t))T . ∆di(t), ∆pi(t)
and ∆si(t) have similar forms to (1), (4) and (5) respectively.2) DRM Performance: The demand levels of the 14 dis-
tricts will be controlled to converge to different expectedlevels. Hence, we use the demand settling time to presentthe time duration before the ideal demand level is reached.Traditionally, grid operator needs to launch exact electricitystorage system or generator unit to compensate the differencebetween actual and expected demand levels. Thus, we definethat the grid operation cost denotes the accumulation of|di − dideal,i| of every time slot.
Fig. 12 shows the DRM performance for the 14 districts andthe 3 selected buses (S1, S2 and S3) in one hour simulation.We find that all nodes are able to control the demand levels totheir expected levels by using the proposed DRM approach.Different districts have different initial demand levels anddifferent expected demand levels. Thus, they have variousdemand settling times. The results in once simulation indicatethe dual influence of symmetrical EV fleets in model basedsimulation. The EV fleets may reduce the demand settling timeand grid operation cost in some districts, but also degradethe DRM performance in other districts. However, the EVfleets can improve the performance of the entire network,which is shown in the 3 selected buses, especially S1. Fromthe main grid perspective, the V2G mobile energy network(or S1) has low average demand settling time and operationcost. Further, we present the average DRM performance inone day simulation, shown in Fig. 13. The results show that

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 10
the EV fleets generally reduce the demand settling time andgrid operation cost for all selected nodes, which indicates thatthe EV fleets are capable to improve the long-term DRMperformance in the network by using the proposed DRMapproach. It’s worth noting that the good performance in S1 iscontributed by the approximating symmetrical EV fleets. TheEV fleets have the potential to balance power demand in thenetwork, which mitigates the diversity of DRM in differentdistricts and enhances the convergence of demand control inthe network.
VI. CONCLUSION AND FUTURE WORK
In this paper, we propose a new network model of V2Gmobile energy network to describe the DRM in V2G systemwith EV mobility across different districts. The DRM andenergy transport problems are investigated from the networkperspective. The DRM dynamics of districts is coupled witheach other through the EV fleets. A state equation set isformulated to provide the DRM dynamics in each district. Thesynchronization of complex network is employed to analyzethe dynamic behaviour of V2G mobile energy network. Modelbased simulation results show that the symmetrical EV fleets isable to achieve synchronous stability of network, which leadsto synchronous stability of demand levels in different districtsby implementing the proposed DRM approach. In addition, Weemploy the real world data in our data driven simulation. Theresults show that the real EV mobility can balance the powerdemand among districts and improve the DRM performancein V2G mobile energy networks.
This paper mainly focuses on the situations of symmetricalEV fleets. The real vehicle travel data indicates that the actualEV fleets may be approximately symmetrical. Therefore, inthis case, simple pricing scheme used in DRM can achievesynchronous stability of the V2G mobile energy network,even if the pricing scheme in each district has no clue ofEV mobility. In case of asymmetrical EV fleets, we need toimplement advanced scheme of pricing in each district. TheEV mobility in the network should be known by each district.The advanced pricing scheme can stimulate appropriate energytransportation among different districts according to the EVmobility to maintain the stability of network. These will beexplored in our future work.
REFERENCES
[1] A. Brooks, E. Lu, D. Reicher, C. Spirakis, and B. Weihl, “Demanddispatch,” Power and Energy Magazine, IEEE, vol. 8, no. 3, pp. 20–29,2010.
[2] Y. Liu, C. Yuen, N. Ul Hassan, S. Huang, R. Yu, and S. Xie, “Electricitycost minimization for a microgrid with distributed energy resource underdifferent information availability,” IEEE Trans. on Industrial Electronics,vol. 62, no. 4, pp. 2571–2583, 2014.
[3] G. Graditi, M. L. Di Silvestre, R. Gallea, and E. Riva Sanseverino,“Heuristic-based shiftable loads optimal management in smart micro-grids,” IEEE Trans. on Industrial Informatics, vol. 11, no. 1, pp. 271–280, 2014.
[4] R. Deng, Z. Yang, M.-Y. Chow, and J. Chen, “A survey on demandresponse in smart grids: Mathematical models and approaches,” IEEETrans. on Industrial Informatics, vol. 11, no. 3, pp. 570–582, 2015.
[5] N. U. Hassan, Y. Khalid, C. Yuen, and W. Tushar, “Customer engage-ment plans for peak load reduction in residential smart grids,” IEEETrans. on Smart Grid, vol. PP, no. 99, pp. 1–1, 2015.
[6] W. Tushar, B. Chai, C. Yuen, D. Smith, K. Wood, Z. Yang, and V. Poor,“Three-party energy management with distributed energy resources insmart grid,” IEEE Trans. on Industrial Electronics, vol. 62, no. 4, pp.2487–2498, 2014.
[7] S. Maharjan, Q. Zhu, Y. Zhang, S. Gjessing, and T. Basar, “Dependabledemand response management in the smart grid: A stackelberg gameapproach,” IEEE Trans. on Smart Grid, vol. 4, no. 1, pp. 120–132,2013.
[8] O. Kilkki, A. Alahaivala, and I. Seilonen, “Optimized control of price-based demand response with electric storage space heating,” IEEE Trans.on Industrial Informatics, vol. 11, no. 1, pp. 281–288, 2014.
[9] Y. Liu, C. Yuen, S. Huang, N. Ul Hassan, X. Wang, and S. Xie, “Peak-to-average ratio constrained demand-side management with consumerspreference in residential smart grid,” IEEE Journal of Selected Topicsin Signal Processing, vol. 8, no. 6, pp. 1084–1097, 2014.
[10] Y. Liu, C. Yuen, R. Yu, Y. Zhang, and S. Xie, “Queuing-based energyconsumption management for heterogeneous residential demands insmart grid,” IEEE Trans. on Smart Grid, vol. PP, no. 99, pp. 1–1, 2015.
[11] P. Guo, J. Wang, B. Li, and S. Lee, “A variable threshold-valueauthentication architecture for wireless mesh networks,” Journal ofInternet Technology, vol. 15, no. 6, pp. 929–936, 2014.
[12] H. Liu, H. Ning, Y. Zhang, Q. Xiong, and L. T. Yang, “Role-dependentprivacy preservation for secure v2g networks in the smart grid,” IEEETrans. on Information Forensics and Security, vol. 9, no. 2, pp. 208–220,2014.
[13] T. Ma, J. Zhou, M. Tang, Y. Tian, A. Al-Dhelaan, M. Al-Rodhaan, andS. Lee, “Social network and tag sources based augmenting collaborativerecommender system,” IEICE TRANSACTIONS on Information andSystems, vol. 98, no. 4, pp. 902–910, 2015.
[14] S. Xie and Y. Wang, “Construction of tree network with limited deliverylatency in homogeneous wireless sensor networks,” Wireless personalcommunications, vol. 78, no. 1, pp. 231–246, 2014.
[15] F. Xia, L. T. Yang, L. Wang, and A. Vinel, “Internet of things,”International Journal of Communication Systems, vol. 25, no. 9, p. 1101,2012.
[16] Z. Xia, X. Wang, X. Sun, and Q. Wang, “A secure and dynamic multi-keyword ranked search scheme over encrypted cloud data,” IEEE Trans.on Parallel and Distributed Systems, vol. PP, no. 99, p. 1, 2015.
[17] Z. Fu, X. Sun, Q. Liu, L. Zhou, and J. Shu, “Achieving efficient cloudsearch services: Multi-keyword ranked search over encrypted cloud datasupporting parallel computing,” IEICE Transactions on Communication-s, vol. 98, no. 1, pp. 190–200, 2015.
[18] Y. Ren, J. Shen, J. Wang, J. Han, and S. Lee, “Mutual verifiable provabledata auditing in public cloud storage,” Journal of Internet Technology,vol. 16, no. 2, pp. 317–323, 2015.
[19] S. Deilami, A. S. Masoum, P. S. Moses, and M. A. Masoum, “Real-time coordination of plug-in electric vehicle charging in smart grids tominimize power losses and improve voltage profile,” IEEE Trans. onSmart Grid, vol. 2, no. 3, pp. 456–467, 2011.
[20] C. Chen and S. Duan, “Optimal integration of plug-in hybrid electricvehicles in microgrids,” IEEE Trans. on Industrial Informatics, vol. 10,no. 3, pp. 1917–1926, 2014.
[21] J. Zhao, F. Wen, Z. Y. Dong, Y. Xue, and K. P. Wong, “Optimal dispatchof electric vehicles and wind power using enhanced particle swarmoptimization,” IEEE Trans. on Industrial Informatics, vol. 8, no. 4, pp.889–899, 2012.
[22] W. Tushar, C. Yuen, S. Huang, D. B. Smith, and H. V. Poor, “Costminimization of charging stations with photovoltaics: An approach withev classification,” IEEE Trans. on Intelligent Transportation Systems,vol. PP, no. 99, pp. 1–14, 2015.
[23] H. Liu, Z. Hu, Y. Song, and J. Lin, “Decentralized vehicle-to-grid controlfor primary frequency regulation considering charging demands,” IEEETrans. on Power Systems, vol. 28, no. 3, pp. 3480–3489, 2013.
[24] H. Liang, B. J. Choi, W. Zhuang, and X. Shen, “Optimizing the energydelivery via v2g systems based on stochastic inventory theory,” IEEETrans. on Smart Grid, vol. 4, no. 4, pp. 2230–2243, 2013.
[25] M.-A. Rostami, A. Kavousi-Fard, and T. Niknam, “Expected costminimization of smart grids with plug-in hybrid electric vehicles usingoptimal distribution feeder reconfiguration,” IEEE Trans. on IndustrialInformatics, vol. 11, no. 2, pp. 388–397, 2015.
[26] J. J. Escudero-Garzas, A. Garcıa-Armada, and G. Seco-Granados, “Fairdesign of plug-in electric vehicles aggregator for v2g regulation,” IEEETrans. on Vehicular Technology, vol. 61, no. 8, pp. 3406–3419, 2012.
[27] Z. Darabi and M. Ferdowsi, “An event-based simulation framework toexamine the response of power grid to the charging demand of plug-inhybrid electric vehicles,” IEEE Trans. on Industrial Informatics, vol. 10,no. 1, pp. 313–322, 2014.
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TII.2015.2494884, IEEE Transactions on Industrial Informatics
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS 11
[28] P. Yi, T. Zhu, B. Jiang, B. Wang, and D. Towsley, “An energy trans-mission and distribution network using electric vehicles,” in Communi-cations (ICC), 2012 IEEE International Conference on. IEEE, 2012,pp. 3335–3339.
[29] P. Yi, T. Zhu, G. Lin, and Q. Zhang, “Routing renewable energy usingelectric vehicles in mobile electrical grid,” in Mobile Ad-Hoc and SensorSystems (MASS), 2013 IEEE 10th International Conference on. IEEE,2013, pp. 19–27.
[30] S. Boccaletti, V. Latora, Y. Moreno, M. Chavez, and D.-U. Hwang,“Complex networks: Structure and dynamics,” Physics reports, vol. 424,no. 4, pp. 175–308, 2006.
[31] L. M. Pecora and T. L. Carroll, “Master stability functions for synchro-nized coupled systems,” Physical Review Letters, vol. 80, no. 10, p.2109, 1998.
[32] A. Arenas, A. Dıaz-Guilera, J. Kurths, Y. Moreno, and C. Zhou,“Synchronization in complex networks,” Physics Reports, vol. 469,no. 3, pp. 93–153, 2008.
[33] J. A. Jardini, C. Tahan, M. Gouvea, S. U. Ahn, and F. Figueiredo, “Dailyload profiles for residential, commercial and industrial low voltageconsumers,” IEEE Trans. on Power Delivery, vol. 15, no. 1, pp. 375–380,2000.
[34] K. Liyanage, A. Yokoyama, Y. Ota, T. Nakajima, and H. Taniguchi, “Im-pacts of communication delay on the performance of a control scheme tominimize power fluctuations introduced by renewable generation undervarying v2g vehicle pool size,” in Smart Grid Communications (Smart-GridComm), 2010 First IEEE International Conference on. IEEE, 2010,pp. 85–90.
[35] J. Medina, N. Muller, and I. Roytelman, “Demand response and distri-bution grid operations: Opportunities and challenges,” IEEE Trans. onSmart Grid, vol. 1, no. 2, pp. 193–198, 2010.
[36] Z. Fan, “A distributed demand response algorithm and its application tophev charging in smart grids,” IEEE Trans. on Smart Grid, vol. 3, no. 3,pp. 1280–1290, 2012.
[37] National Renewable Energy Laboratory, 2010-2012 California House-hold Travel Survey, [Online]. Available: http://www.nrel.gov/tsdc, 2014.
[38] A. Kavousi-Fard, M. A. Rostami, and T. Niknam, “Reliability-orientedreconfiguration of vehicle-to-grid networks,” IEEE Trans. on IndustrialInformatics, vol. 11, no. 3, pp. 682–291, 2015.
Rong Yu (S’05-M’08) received the Ph.D. degreefrom Tsinghua University, Beijing, China, in 2007.After that, he worked in the School of Electronicand Information Engineering at South China Uni-versity of Technology, Guangzhou, China. In 2010,he joined the Institute of Intelligent InformationProcessing at Guangdong University of Technol-ogy, Guangdong, China, where he is now a fullprofessor. His research interest mainly focuses onwireless communications and networking, includingcognitive radio, wireless sensor networks, and home
networking. He is the co-inventor of over 10 patents and author or co-author ofover 70 international journal and conference papers. He is currently serving asthe deputy secretary general of the Internet of Things (IoT) Industry Alliance,Guangdong, and the deputy head of the IoT Engineering Center, Guangdong.He is the member of home networking standard committee in China, wherehe leads the standardization work of three standards. He is a member of theIEEE.
Weifeng Zhong (S’13) received the B.Eng. degreein automation from Guangdong University of Tech-nology (GDUT), Guangzhou, China in 2013, andis currently working toward the Ph.D. degree incontrol science and engineering in GDUT. He is amember of the Institute of Intelligent InformationProcessing at GDUT. His research interest includesvehicle mobility, demand response, V2G networksand communications networks in the smart grid.
Shengli Xie (M’01-SM’02) received the M.S. de-gree in mathematics from Central China NormalUniversity, Wuhan, China, in 1992, and the Ph.D.degree in control theory and applications from SouthChina University of Technology, Guangzhou, Chi-na, in 1997. He is presently a full professor andthe head of the Institute of Intelligent InformationProcessing at Guangdong University of Technology,Guangzhou, China. His research interests includewireless networks, automatic control and blind sig-nal processing. He is the author or co-author of
two books and more than 150 scientific papers in journals and conferenceproceedings. He received the second prize in Chinas State Natural ScienceAward in 2009 for his work on blind source separation and identification. Heis a senior member of the IEEE.
Chau Yuen (SM’13) received the B.Eng. and Ph.D.degrees from Nanyang Technological University,Singapore, in 2000 and 2004, respectively. He was aPost Doc Fellow at Lucent Technologies Bell Labs(Murray Hill) during 2005, and a Visiting AssistantProfessor of Hong Kong Polytechnic University in2008. From 2006-2010, he worked at the Institutefor Infocomm Research (Singapore) as a Senior Re-search Engineer. He has published over 150 researchpapers in international journals or conferences. Hispresent research interests include green communica-
tions, massive MIMO, Internet-of-thing, machine-to-machine, network coding,and distributed storage. He joined Singapore University of Technology andDesign as an assistant professor in June 2010. He also serves as an AssociateEditor for the IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY.
Stein Gjessing (M’90) is an adjunct researcherat Simula Research Laboratory and a professor ofcomputer science in Department of Informatics, U-niversity of Oslo. He received his Ph.D. degree fromthe University of Oslo in 1985. Gjessing acted ashead of the Department of Informatics for 4 yearsfrom 1987. From February 1996 to October 2001, hewas the chairman of the national research program”Distributed IT-System” founded by the ResearchCouncil of Norway. His current research interests arerouting, transport protocols and wireless networks,
including cognitive radio and smart grid applications.
Yan Zhang (M’05-SM’10) is currently Head ofDepartment, Department of Networks at Simula Re-search Laboratory, Norway; and an Associate Pro-fessor (part-time) at the Department of Informatics,University of Oslo, Norway. He received a Ph.D. de-gree in School of Electrical & Electronics Engineer-ing, Nanyang Technological University, Singapore.He is an associate editor or on the editorial board ofa number of well-established scientific internationaljournals, e.g., Wiley Wireless Communications andMobile Computing (WCMC). He also serves as the
guest editor for IEEE Transactions on Industrial Informatics, IEEE Commu-nications Magazine, IEEE Wireless Communications, and IEEE Transactionson Dependable and Secure Computing. He serves as chair positions in anumber of conferences, including IEEE PIMRC 2016, IEEE CCNC 2016,WICON 2016, IEEE SmartGridComm 2015, and IEEE CloudCom 2015. Heserves as TPC member for numerous international conference including IEEEINFOCOM, IEEE ICC, IEEE GLOBECOM, and IEEE WCNC. His currentresearch interest includes: wireless networks and reliable and secure cyber-physical systems (e.g., healthcare, transport, smart grid). He has received 7Best Paper Awards. He is a senior member of IEEE, IEEE ComSoc, and IEEEVT society.





























