Embed Size (px)
Citation preview
![Page 1: [IEEE TENCON'94 - 1994 IEEE Region 10's 9th Annual International Conference on: 'Frontiers of Computer Technology' - Singapore (22-26 Aug. 1994)] Proceedings of TENCON'94 - 1994 IEEE](https://reader042.pdfslide.us/reader042/viewer/2022022412/5750abfd1a28abcf0ce39c96/html5/page/1.jpg)
A Computer-Aided Approach for Optimal Statistical Design
Y. Shen and R. M. M. Chen
Dept. of Electronic Engineering City Polytechnic of Hong Kong
Abstract In this paper, a new approach for design
centering and tolerancing to achieve 100% yield is introduced. The procedure consists of steps solving three optimization problems: first, centering the design point to the viciniiy of the optimum point in the design parameter space, second, solving a fixed tolerance problem, and third, solving a variable tolerance problem, in which parameter tolerances are re-assigned to achieve I OO?? yield and minimum cost. Two numerical examples testing the approach are presented.
1. Introduction
Let cirmit design parameters and their tolerances be represented in the parameter space. It is often requid to find a point with the maximum tolerances in the pa" space that satisfies all design spedications and constraints and achieves 1Wh yield at minimum cost.
A traditional approach for yield estimation is to use Monte Carlo analyses[l]. Several authors have dealt with the problem by solving a geometrical problem of finding an approximation to the region of aaceptability R,. Direaor and Hachtel [2] i n t r o d d simplicial approximation. Quadratic approximations [3][4] have proven to be more s u c c e a than simplicial approximation but requires too many test points and too marry cirmit simulations. Ellipsoidal method [5] is effective, it needs a non-linearly constrained o@uintion method and requires circuit sirmulations to calculate the performance functions and their derivatives with respect to the optimization variables at each iteration. Chen and Lai [6] proposed a method to approximate RA by an ellipsoid using the endpoints, i.e., intersection points, of all axes on the boundary of RA. This method coverts the constrained optimization problem to an unconstrained optimization problem and is a computationally fast for tolerance assignment with 100% yield but has the problem of inaccuracy. Worst-case method [7] may achieve maximum assurance for 1Wh yield but it needs a lot of computations.
We propose a method which utilizes the endpoints of all axes on the boundary of RA to center the design point and then to solve a fixed and a variable tolerance assignment problems.
2. Description of the Method
Suppose that we wish to design a circuit with n design parameters and m constraints. The parameter space is an n-dimensional Euclidean space R". We assume that the set of design specifications has the form
where x is a point in the parameter space and 4 is the m dimensional vector function of circuit Spenfications.
Inquality (1) defines a set of points in the performance space. The region of acceptability RA, is defined as a set of points satisfying (1) in the parameter space R".
Our method is to solve three problems. The first problem is to find a point xo with the maximum distance from the boundary of RA. The problem is solved by an optimization method. Searching along an axis to estimate the boundary of RA and an unconstrained optimization method can be used. The point resulting from this solution is usually close to the optimum point, which will be found later on.
The second problem is a fixed tolerance problem. The worst-case method for tolerance optimization is applied. The parameter tolerances are initially assigned by the problem's initial value. By moving the enter point to the optimum position, yield is improved to a maximum for the given fixed tolerances. Usually it needs a large number of simulations to solve this problem, because the number of vertexes of a tolerance polyhedron is 2". To reduce the simulation number, high order polynomial approximations are wnstructed to replace the actual constraints. The coefficients in the polynomial approximations can be determined using accumulated simulation results.
The third problem is a variable tolerance problem, in which all tolerances are optimized to meet the 100% yield requirement. The problem is solved by repeatedly m-ng the tolerance assignment and
&x) 2 0 (1)
928
n
![Page 2: [IEEE TENCON'94 - 1994 IEEE Region 10's 9th Annual International Conference on: 'Frontiers of Computer Technology' - Singapore (22-26 Aug. 1994)] Proceedings of TENCON'94 - 1994 IEEE](https://reader042.pdfslide.us/reader042/viewer/2022022412/5750abfd1a28abcf0ce39c96/html5/page/2.jpg)
solving the fixed tolerance problem, until maximum tolerances are obtained with no violation occufi.
In manycases, a product cost is to be "ked. Product cost contributed by the parameter tolerances is inversely proportional to the tolerance assignment, i.e.
where CA is a fixed cost per circuit product; Wi is the cost weighting constant associated with the ith design parameter tolerance assignment. t is defined to be the tolerauce assignment
(3) After the three problems are solved, the resultant
x and t are called the optimum parameter point denotedby
(4)
(5 )
t = [t,,t2, -, t,f, t, > o for i = ~; -p .
x* = [XI*' x;, -, x,']T and the optimum tolerance assignment denoted by
which achieve loOO? yield and minimum cost.
3. The Centering Problem
t* = [t,*, t2*,--, tn>T, t, > o fori = l,-.,n.
This problem is to find the point P = [x,o&20, ..e, .,"I*
which has the maximum distance from the boundary of the region of acceptalnlity. The two endpoints of a point xO along an axis are defined as the points intersecting with the boundary of RA along the axis. The endpoints are denoted by r'+ and x'- (i=1,2, -, n) being on the ~ t h axis in opposite directions around the center point xo .
The distance is r = [r,, rB-, rn]* r, 2 0 for i = l,-,n (6)
where r, is defined as the shorter length from the point 9 to the boundary of RA, along the ith axis, i.e.,
ri = min{(x;+ - x,"), (x," - x;-)) i = I,... ,n The objective function of this optimization
problem is chosen to have the same pattern as the formula (2), that is to solve the following constrained optimization problem:
(7)
subject to the constraints of (l), where 5 = 5 /xp . The optimization variables are the n coordinates
of the center point and the relative distances 4 , & . a . ,F,, . We use the relative distances to reduce the effea of drastic magnitude difference of the panmeter values for various types of electronic components.
The tolerances are then assigned proportional to the relative distances.
Because the boundary is found along an axis direction, the problem is simplified to an one- dimensional problem. The endpoint of each axis on the boundary can be determined from the roots of the m constraint functions, they are
(j(x) = 0 j=l;-,m (8)
929
lr
The root nearest the center point P is taken as the endpoint.
~n iterative uncinstrained optimization can be used to solve this problem. The solution P is an approximation to the optimum point.
4. Fixed Tolerance Problem
This problem is to find a point in the parameter space to achieve largest yield while the parameter tolerances are fixed to a given vector of tolerance denoted by (3). Worst case method or center of gravity method can be used to solve the problem.
The tolerance interval is defined as 4 = 9 I (xp-ti i yi i .;+ti, i = 1, e-, n))
and the worst case objective function is,d&ed as (9)
I
where y = I.Yl,y,,-,~"IT
The fixed tolerance problem is defined as min F ( x o )
X O d l "
In other words, the location x is determined in such a way that the worst case objective function (10) is
A center of gravity method [8] can be b n d y described in the following. Let N be the total number of samplmg points, NI be the number of sampling point a.' such that x' E RA. Then the new estimate of P, denoted by e, is computed as
where 2 2 a 2 1. This is a heuristic extrapolation method. This procedure iterates until the maximum of the estimated yield is reached.
To find the value of the worst case objective function (lo), circuit simulations are performed at the points with the extreme parameter values, namely the vertexes of the tolerance interval q. This method suffers from the dimensionality problem, because the number of vertexes is 2", which increases rapidly with the dimension n.
The center of gravity method also rapires a large number of simulation runs because sample points are produced randomly. To reach a modest accumy, a large number of sample points are needed.
To reduce the number of simulation runs, we use high order polynomials to approximate the constraint functions. The errors of the approximate functions can be limited to a given small value. The data needed to collst~ct the polynomials are directly come from the simulation results of the centering problem. Therefore, the additional number of the simulation runs can be drastically r e d d or even be zero in solving this problem.
![Page 3: [IEEE TENCON'94 - 1994 IEEE Region 10's 9th Annual International Conference on: 'Frontiers of Computer Technology' - Singapore (22-26 Aug. 1994)] Proceedings of TENCON'94 - 1994 IEEE](https://reader042.pdfslide.us/reader042/viewer/2022022412/5750abfd1a28abcf0ce39c96/html5/page/3.jpg)
ment less than a geven
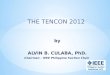
& Fig. 1. Flowchart of Variable Tolerance Problem
5. The Variable Tolerance Problem
This problem is to re-assign tolerances to achieve 100% yield and minimum cost. This is done by repeatedly solving the fixed tolerance problem with Merent t until the minimum cost is reached and no violation occur^ in 4. This is a double-iterative procedure, as shown in Fig. 1, the inner iteration is the fixed tolerance problem, which modifies iteratively the position of the center point to find the maximum yield. The outer iteration is the variable tolerance problem, which changes the tolerance assignment such that the minimum cost can be reached and no violation occurs to the constraints.
The objective of this problem is
*wO x .t ,t)) (13)
subject to the constraint yield = 1000/0.
The maximum tolerance assignment and the center of the tolerance interval can be obtained simultaneously from the solution of this problem.
6. The Overall procedure
The procedure starts with the centering step to solve the centering problem. This step serves two purposes: first, moving the center point xO to the neighborhood of the optimum point x*, and second, storing the simulation results obtained in this step and preparing to construct a set of high order polynomials to approximate the constraint functions.
The next step is to construct the polynomials by determining the coefficients.
After the polynomials are constructed, the fixed and variable tolerance problem can be solved by the double-iterative procedure described before. In this procedure, the errors of polynomials are monitored in case any error exceeds a given limit. If the error ex& the limit, the polynomials are re-wnstructed using new center point and new simulation results.
7. Numerical Examples
Two examples are presented in this section to demonstrate the effectiveness of the design centering and tolerance assignment procedure using the procedure described above.
Example I. Highpass LC ladder filter Consider the highpass LC ladder filter shown in
Fig. 2. This filter has been used quite often in the circuit design literature [9] [ 101 [ 1 11. The specifications are shown in Fig. 3. The gain function is defined as follows:
the constraints were set and expressed as Gv) = 20 log (IVd2M / Vd2n990)()
41 = G(170) - (-45) S 0 k = G(350) - (-49) S 0 h = G(440) - (-42) S 0 44=-4-G(63O) SO
Fig. 2. LC high-pass filter Fig. 3. Nominal response and specifications
930
![Page 4: [IEEE TENCON'94 - 1994 IEEE Region 10's 9th Annual International Conference on: 'Frontiers of Computer Technology' - Singapore (22-26 Aug. 1994)] Proceedings of TENCON'94 - 1994 IEEE](https://reader042.pdfslide.us/reader042/viewer/2022022412/5750abfd1a28abcf0ce39c96/html5/page/4.jpg)
Gaussian Distribution
Element Initial Value Result of Result of Fixed Result of Variable fi I t (%) Centering Step Tol. Problem Tol. problem
11.1 nF I20 13.390 nF I 20 13.913 nF I20 14.254 nF I 12.24 10.47 nF I 20 10.096 nF I20 10.281 nF / 20 10.633 nF 16.49 12.9 nF 120 14.145 nF I 20 13.744 nF I20 14.936 nF 18.65 34.3 nF I20 34.670 nF I20 35.134 nF I20 35.697 nF I 5.30 97.3 nF 120 100.32 nF 120 100.47 nF I20 101.82 nF 17.70 3.988 H 120 3.9681 H I20 3.9349 H 120 3.8600 HI 8.74 2.685 H 120 2.6615 H I20 2.6281 H I20 2.5399 H I9.58
28.4% 58.1% 60.8% 100%
$ I t (%) $ I t ( % ) $ I t ( % ) Cl c2 c3 c4 CS
2 Yield &st 3.61
45 = G(630) - 0.05 S 0 6 = -1.75 - GV) S 0
&=GV)-0.05 S O for j = 6, 8, 10, -, 18
fork = 7, 9, 11, -, 19, where (6i and & are the lower and upper constraint respectively for frequency f = (650, 720, 740, 760, 940,1040, 1800) Hz and G is the response magnitude referenced to the magnitude of each sample filter at 990 Hz. There are 7 designable parameters denoted by
In the first step the nominal points used in [9] were selected as our initial values. The center of gravity method [SI is used to solve the fixed tolerance problem. The results are shown in Table I. The yield was verified using lo00 sample Monte Carlo analysis. The random variables have a Gaussian distribution
[CI,C,,C3,C,,C,L6LL,1.
uniform Distribution
Result of Var. Tol. hob.
14.144 nF 17.97 10.574 nF 14.24 14.893 nF I 5.65 37.539 nF 13.46 100.27 I@ / 5.03 3.7061 H 15.71 2.6237 H 16.26
1oOOh 4.19
$ I t ( % )
with 2013 percent standard deviation. When the tolerances are fixed to 20% at the
initial point, yield is 28.4%. After the step solving the centering problem, the yield is improved to 58.1%. By solving the fixed tolerance problem with all tolerances fixed to 20%, the yield is further improved to 6O.80/0.
To achieve 100% yield, the tolerances are re- assigned in the variable tolerance problem. After the optimization, optimum tolerances are found as shown in Table I. Let CA=2.5; Wi = 1, for i = 1,2;-,5; and Wj = 2, for i = 6,7, the associated cost is 3.61.
In order to compare the results with [ll], uniformly distributed random variables are used. The results are shown in Table I. The cost is 4.19, which is better than the result in [Ill.
Example 2. An 11th order low-pass filter is shown in Fig. 4, the values of the elements are gmn in Table II.
Fig. 4. LC low-pass filter
TABLE I1 NOMINAL POINTS, TOLERANCES AND YIELDS FOR EXAMPLE 2
I Element I Initial Value I Result of Centerine 1 Result of Fixed Tol. I Result of Variable Tol. I
Ll L2 L3 L4 L5
c7 CS c9 ClO C, ,
' 6
Yield
$ I t ( % ) 0.2251 11.5 0.2494 I 1.5 0.2523 I 1.5 0.2494 11.5 0.2251 11.5 0.2149 I 1.5 0.3636 I 1.5 0.3761 11.5 0.3761 I 1.5 0.3636 I 1.5 0.2149 I 1.5
, 49.4%
- $ I t ( % )
0.2275 I 1.5 0.2506 / 1.5 0.2512 11.5 0.2489 I 1.5 0.22301 1.5 0.2203 11.5 0.3581 11.5 0.3755 11.5 0.3764 I 1.5 0.3646 I 1.5 0.2194 I 1.5
61.4%
$ I t ( % ) 0.2197 I 1.5 0.2490 I 1.5 0.2507 I 1.5 0.2434 I 1.5 0.2195 11.5 0.2295 I 1.5 0.3692 I 1.5 0.3776 / 1.5 0.3782 I 1.5 0.3745 11.5
93 1
r
* 65.4%
$ I t % 0.2197 10.5000 0.2490 10.4943 0.2507 10.3689
0,2195 10.4967 0.2295 I 0.9337 0.3692 10.4600 0.3776 10.4642 0.3782 10.4629 0.3745 10.4611 0.2267 10.9509
0.2434 1 o.so2i 4 100%
![Page 5: [IEEE TENCON'94 - 1994 IEEE Region 10's 9th Annual International Conference on: 'Frontiers of Computer Technology' - Singapore (22-26 Aug. 1994)] Proceedings of TENCON'94 - 1994 IEEE](https://reader042.pdfslide.us/reader042/viewer/2022022412/5750abfd1a28abcf0ce39c96/html5/page/5.jpg)
cu, = 20 log I V,u, / VJO) I The design speafications are given as
m2-0.32 for Osfsl S -52.0 for 1.3 <f
The lower and upper speafications on the filter gain are -0.32 dE3 at (0.02, 0.04, .-, 1) Hz and -52 dB at 1.3 IIZ respectively.
When the tolerances are fixed at 1.50/4 the yield is 49.4% at the initial point, calculated by lo00 sample Monte Carlo analysis with unformly distributed random values. At the end of Centering Step, the yield is improved to 61%. Worstcase method is used to solve the fixed tolerance problem. After solving the bed tolerance problem, the yield
After the completion of the procedure, the tolerances are re-assigned to achieve 1Wh yield. The results are shown in Table II. Let all Wi = 1. The associated cost is 21.51.
in- to 65.4%.
8. Summary
The computer-aided approach for optimal statistical design was presented. The whole procedure includes solving three optimization problems. Our main idea is to emphasize either the speed or the accuracy in different stages. In the beginning of the Optimization, ,how to quickly approach the optimal point is important, so the centering step is used. In the fixed and variable tolerance problem, accuracy is important for the tolerance re-assignment. Therefore accurate high order polynomials are constmad to replace. real simulation IUS. At the end of computation, maximum tolerances are obtained to achieve 100% yield.
If only vertex values of tolerance region are evaluated in solving the fixed tolerance problem, the region of acceptability is l i t e d to be convex. Otherwise, the final results of the tolerance assignment may not guarantee a yield of 100%. In this case, the tolerances are further reduced till 100% yield is achieved.
One of the advantages of the employment of accurate approximate functions, such as high order polynomials, is that non convex region of acceptability maybe deal with by using methods such as the Design Centering algorithm [ 121.
Acknowledgment
The authors would like to acknowledge the Suppoa provided by the City Polytechnic of Hong Kong and the research grant from the University and Polytechnic Grants Committee of Hong Kong.
References
[l] Malvin H. Kalos and Paula A. Whitlock, Monte Carlo Methods, John Wiley & Sons, Inc. 1986.
[2] S. W. Director and G. D. Hachtel, "The simplicial approximation approach to design centering," IEEE Trans. on Circuits and Syst.,
[3] J. W. Bandler and H. L. -1-Malek, "Optimal centering, tolerancing, and yield determination via approximations and cuts," IEEE Trans. on Circuits and sysl., vol. CAS-25, pp. 853-871, 1978.
[4] R M. Biernacki, J. W. Bandler, J. Song, and Q. J. Zhang, "Efficient quadratic approximation for statistical design," IEEE Trans. on Circuits and
[5] 1. M. Wojciechowski and Jiri Vlach, "Ellipsoidal methcd for design centering and yield estimation," IEEE Trans. on Circuits and Syst., vol. 12, pp. 1570-1579, 1993.
[6] Richard. M. M. Chen and Y. M. Lai, "An efficient algorithm for optimum assignment of circuit component tolerances", Proc. China 1991 International Conference on Circuits and Systems, pp. 757-760, 1991.
[7] H. Schjaer-Jacobsen and K. Madsen,"Algorithms for worst-case tolerance optimization," IEEE Trans. on Circuits and Syst.., vol. CAS-26, pp.
[8] M. A. Slyblinski, "Problems of yield gmhent estimation for truncated probability density functions", IEEE Trans. on Computer-Aided Design, vol. CAD-5, No 1. pp. 30-38, 1986.
[9] S. W. Director, G. D. Hachtel, and L. M. Vidigal, "Computationally efficient yield estimation procedures based on simplicial approximation," IEEE Trans. on Circuits and
[lo] D. E. Hocevar, M. R. Lightner, and T. N. Trick, "An extrapolated yield approximation technique for use in yield maximization," IEEE Trans. on Computer-Aided Design, vol. CAD-3, pp. 279- 287, 1984.
[ l l ] R. M. M. Chen and W. W. Chan, "An efficient tolerance design procedure for yield maximization using optimization techniques and neural network", Proc. 1993 IEEE International Symposium on Circuits and Systems, Chicago,
[12] L. M. Vidig and S. W. Director, "A design centering algorithm for nonconvex region of acceptability", IEEE Trans. on Computer-Aided Design of Integrated Circuits and Systems, vol.
vol. CAS-24, pp. 363-372, 1977.
SySt., vol. 36, pp. 1449-1454, 1989.
775-783, 1979.
SySt., vol. CAS-25, pp. 121-130, 1978.
USA, pp.1793- 1796, 1993.
CAD-1, NO 1. pp. 13-24, 1982.
932