Embed Size (px)
Citation preview
![Page 1: [IEEE 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) - Odessa, Ukraine (2014.5.27-2014.5.30)] 2014 IEEE International Black Sea Conference](https://reader036.pdfslide.us/reader036/viewer/2022092701/5750a5d31a28abcf0cb4e13d/html5/thumbnails/1.jpg)
A Spatial Estimation-based Handover Managementfor Challenging Femtocell Deployments
Tugrul M. MutluDepartment of Computer Engineering
Istanbul Technical UniversityAyazaga 34469, Istanbul-Turkey
Email: [email protected]
Berk CanberkDepartment of Computer Engineering
Istanbul Technical UniversityAyazaga 34469, Istanbul-Turkey
Email: [email protected]
Abstract—In next generation cellular systems, femtocell tech-nology has been emerged as one of the leading deploymentstrategies aiming for a better indoor coverage and “5-bar” signalstrength. Although widely studied in the literature, mobilityand handover managements in these networks remain as atechnical challenge in need of effective solutions. Especially inchallenging indoor environments which consist of several wallsand other physical obstacles, unnecessary handovers caused byunpredictable path losses are triggered in many situations. Inorder to manage the misleading handover decisions caused bythese challenging topological infrastructures, a spatial estimationcan be implemented into the handover algorithm. With thismotivation, in this paper, we propose a new handover algorithmbased on path loss measurements. To minimize the number ofunnecessary handovers not only the measured path loss butalso spatially estimated path loss values are considered forhandover decision. Since empirical path loss models estimatepath loss based on the average measurements, these modelsmay not be suitable for challenging femtocell deployments. Inthis paper, instead of using empirical path loss models, Kriginginterpolation methods are used so as to spatially estimate pathloss measurements. The simulation results show that the proposedalgorithm can minimize unnecessary handovers and lower theping-pong handover rate compared with conventional scheme inchallenging indoor environments.
Keywords—Handover, path loss, femtocell, kriging.
I. INTRODUCTION
In order to meet the demands on emerging and futurecellular wireless systems, the recent development of femtocell-based networks is an appropriate way for indoor mobile users.In these types of networks, femto base stations (fBS) whichhave low transmit power are deployed at indoor environments.In most cases, a macro base station (mBS) also covers theseindoor environments which has higher transmit power thanfBSs. In these types of deployments, mobility managementbecomes the major issue to be solved. More specifically,guaranteeing an efficient, seamless and also fast handover isa must in the area of mobility management. To achieve thispurpose, we are interested in studying an efficient handoveralgorithm to be used in the femtocell-based networks forindoor mobile users.
In effect, the handover algorithms may be based on differ-ent types of measurements, e.g., the received signal strength(RSS), the distance from the base station and the bit errorrate. RSS is the most common criteria. In addition to thesemeasurements, path loss could also be used in handover
process in order to diminish the strong mBS signal strengtheffect [1].
There have been several studies for handover algorithmsbased on RSS with hysteresis to reduce unnecessary handovers.In order to determine the hysteresis value, in [2], the authorcombines the RSSs from both mBS and the associated fBS. In[3], the author proposes a handover process using a queuingmodel and a new cell selection method to achieve load balanc-ing among mBS and fBS. The author in [4] proposes a newhandover procedure for UMTS networks using hybrid accesstype fBSs. In [5] the author analyses both mobility and signalstrength in handover procedure in order to reduce unnecessaryhandovers. In femtocell-based networks, mobility predictionmethods are also used to make fast and seamless handover. Theauthor in [6] creates a mobility database depending on the actsof mobile users. Then according to the historical information,the number of unnecessary handovers is minimized. The authorof [7] claims that, because the other mobility predictiontechniques are complex, implementing them to the systemwill also be an issue. Therefore they propose a mobility man-agement technique with simple handover prediction. Howeverthese studies depend on RSS measurements of mobile userwhich are not suitable for femtocell-based networks becauseof high transmit power of mBS or they do not consider indoorenvironments at all.
In this paper, we propose a new path loss-based handoveralgorithm that is suitable for femtocell-based networks. Achallenging indoor environment consisting of several wallsis considered in this paper where estimating the path loss ismore challenging than for outdoors, since the variability in theenvironment is much greater in short distances. For instancein [8], the author showed that the path loss due to a typicaldry wall is about 5.4 dB. Unlike the other algorithms that arebased on RSS measurements for handover decision, path lossmeasurements are used in this paper. Since path loss based cellselection removes the issue of huge difference in fBS and mBStransmit powers which prevent the MS to camp on the lowpowered fBS, path loss is more suitable for handover decisionin indoor environments [9]. The proposed handover algorithmdepends on not only the path loss measurements at MS, butalso the spatially estimated path loss of future locations whichare the locations that the MS will most likely reach in thefuture. This feature gives us the opportunity to increase thestability of MS in its mobility pattern. Although path losscan be estimated using several empirical path loss models
2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom)
978-1-4799-4067-7/14/$31.00 ©2014 IEEE 144
![Page 2: [IEEE 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) - Odessa, Ukraine (2014.5.27-2014.5.30)] 2014 IEEE International Black Sea Conference](https://reader036.pdfslide.us/reader036/viewer/2022092701/5750a5d31a28abcf0cb4e13d/html5/thumbnails/2.jpg)
[10], [11], because empirical models to estimate path loss relyon average path loss measurements in various environments,these models are not suitable for the proposed handoveralgorithm which takes into account the unpredicted topologicalchanges leading unexpected path losses. In this paper, Kriginginterpolation methods are used in order to spatially estimatepath loss measurements. Our results illustrate the effects ofvarious parameters.
The rest of the paper is organized as follows: The systemmodel is presented in Section II and the proposed algorithmis analysed in Section III. Section IV shows performanceevaluation and conclusions are drawn in Section V.
II. SYSTEM MODEL
A. Network Model
As shown in Fig.1, we consider a femtocell-based networkenvironment that consists of a mBS (macro base station) anda fBS (femto base station) with several MS (mobile station)moves from fBS’s coverage area to mBS’s coverage areaand vice versa. Since the transmit power of mBS is higherthan the transmit power of fBS, mBS covers entire networkinclude both indoor and outdoor users. The fBS is located in achallenging indoor environment surrounded with several typesof concrete walls within the coverage region of the mBS.
Under the above framework, for a given time t, the MSmoves from one coverage region to the other, where its pathloss will depend on not only the distance to the base stationbut also the surrounding concrete walls, a handover algorithmis processing to decide whether to handover or not.
B. Spatial Estimation
The proposed handover prediction algorithm uses ordinaryKriging interpolation techniques [12] to spatially estimate pathloss measurements. Assume that i is a location in a topologywhich has a measured path loss value pi and another locationu which has an unknown path loss value pu. In order to findpath loss pu, in ordinary Kriging, a set of neighborhoods oflocation u is defined. Let S (u) = {1, ....., Nu} be the set ofneighborhoods of location u such that the path loss pi is knownfor each location i ϵ S(u). By using the set of locations S(u)and corresponding path loss values, pu could be estimated asfollows:
pu =∑
iϵS(u)
wipi (1)
where∑
iϵS(u) wi = 1. Here wi represents the Kriging weightfor the associated location i. These weights are calculated asfollows:
w1
.
.wNu
λ
=
γ1,1 . γ1,Nu 1. . . .. . . .
γNu,1 . γNu,Nu 11 . 1 0
−1
γ1,u..
γN,u
1
(2)
Fig. 1. Considered Topology
where λ is the Lagrange multiplier and γi,j is the semivar-iogram which represents the correlation between two locationsi and j. There are several kinds of semivariogram models [13]exist in the literature which are suitable for specific kinds ofdata sets. Some of these models are commonly used, such aslinear, exponential, gaussian, and spherical. Choosing the rightsemivariogram model is vital for proper Kriging interpolation.Since the path loss of a base station significantly diminishesat several meters away from its transmitter, the exponentialsemivariogram model is suitable for this paper. The exponentialsemivariogram is calculated as follows:
γi,j =
{0 hi,j = 0
c0 + (c− c0) exp(1− 3hi,j/a) hi,j > 0(3)
where c0 is the nugget , c is the sill and a is the rangeof the semivariogram function. In addition hi,j represents thedistance between locations i and j. In a semivariogram model,the first distance where the semivariogram value becomesconstant is called the range. The semivariogram value at rangedistance is known as the sill and the semivariogram value atdistance zero is called the nugget.
C. Distance Measure
In ordinary Kriging, the correlation between two locationsdepends on the distance between them. Although the Euclideandistance is a good measure in outdoor environments, it maynot be proper for indoor environments. For example, path lossvalues of two different locations may be very different becauseof the concrete wall between them. To take the effect of wallsa recent study [14] proposes a distance measure which will beadopted in this paper, based on the equation given as follows:
hi,j =√(xi − xj)2 + (yi − yj)2 + 10E (4)
where E = (10c)−1∑
rϵWi,jLr. (xi, yi) denote the xy-
coordinates of a point i, Wi,j is the walls locating betweenlocations i and j, c represents the path loss exponent of theenvironment and Lr represents the wall thickness coefficient.
2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom)
145
![Page 3: [IEEE 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) - Odessa, Ukraine (2014.5.27-2014.5.30)] 2014 IEEE International Black Sea Conference](https://reader036.pdfslide.us/reader036/viewer/2022092701/5750a5d31a28abcf0cb4e13d/html5/thumbnails/3.jpg)
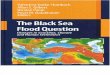
Fig. 2. Proposed Handover Management Mechanism
With using this equation, the distance between two locationsi and j is increased according to the walls between them interms of the Euclidean distance.
III. PROPOSED SCHEME
A. Handover Management Mechanism
Since fBSs are generally located in indoor environments,the time duration of a MS remains camped on a fBS could bevery short because of poor signal quality due to surroundingconcrete walls. This situation may cause unnecessary han-dovers. To minimize the number of unnecessary handovers, wepropose a handover management mechanism as shown in Fig.2. This mechanism should work on both mBS and fBS with asmall difference. In fBS, the Received Path Loss Collectionsshown in Fig. 2, are the reports that are measured by MSswhich camp on fBS. On the other hand, in the mBS, theReceived Path Loss Collections are not the path loss reported tothe mBS, but these are the same path loss measurements whichare reported to fBS. It means that for both mBS and fBS onlypath loss related with fBS is considered for handover decision.This is because, in the proposed scheme, only fBS to mBS andmBS to fBS handover is studied with the assumption that MSwill always move in the coverage region of mBS. Accordingto considered topology all fBSs are within the coverage regionof the mBS. Therefore handover can occur only if the path lossrelated with fBS is less or greater than a predefined thresholdQHO which is related with fBS’s receiver sensitivity. It isassumed that mBS obtains these path loss collections by usingbackhaul network connections like 3GPP LTE X2 interface[15]. The mechanism has four basic operations, two inputs andone output as it can be seen in Fig. 2, which are explained asfollows:
• MSs which are located at n different positions andcamped on fBS measure their path loss and reportthem to the fBS. These collected path losses are notonly stored at the fBS, but also they are shared to mBSvia backhaul network connections. They are given asinputs to the Spatial Estimation block as shown in Fig.2.
• The set of future locations F (u) are the neighborhoodcoordinates of MS which MS will most likely reach
Fig. 3. Handover Estimation Scenario
in the future. In each step of movement of MS, anew F (u) is generated. Only the locations whichare located in the same direction with the currentmovement path of MS are considered as the neighbor-hoods and they are determined according to a distanceparameter d. F (u) is given as a parameter to SpatialEstimation and Handover Prediction blocks. In ourproposed study, the effect of d is also studied.
• The Spatial Estimation uses an ordinary Kriging inter-polation to estimate the path loss pi for all locations iwhere i ϵ F (u). Because the considered topology is anindoor environment, pi could vary in small distancesbecause of the concrete walls. We take into accountpath loss due to walls by using the distance formula in(4). All pi values are given as a parameter to HandoverPrediction block.
• Handover Prediction block considers the distance ofthese future locations and their path losses and triesto estimate handover necessity according to proposedscheme.
B. Handover Prediction
The proposed scheme is designed to make handover deci-sion in order to minimize unnecessary handovers and numberof ping-pong handovers due to challenging environments.A simple movement scenario for a MS is depicted in Fig.3. According to the scenario, in the very first step of themovement, MS is out of fBS’s coverage area. In its next steps,for a small period, MS enters the coverage area of fBS, but thenit passes behind the wall where it is out of fBS’s coverage areaagain. Because conventional approach takes only the currentlocation’s path loss into account, these kinds of situationsmay cause unnecessary handovers. However, in the proposedscheme, a new handover path loss P̃(u,F (u)) is defined as afunction of F (u). Then this value is compared with QHO inorder to decide whether to start a handover procedure or not.P̃(u,F (u)) is defined as follows:
P̃(u,F (u)) =pu +
∑iϵF (u) piwi
1 +∑
iϵF (u) wi(5)
2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom)
146
![Page 4: [IEEE 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) - Odessa, Ukraine (2014.5.27-2014.5.30)] 2014 IEEE International Black Sea Conference](https://reader036.pdfslide.us/reader036/viewer/2022092701/5750a5d31a28abcf0cb4e13d/html5/thumbnails/4.jpg)
TABLE I. SIMULATION PARAMETERS
mBS maximum transmit power 42dB
fBS maximum transmit power 30dB
mBS rx sensitivity −126.5dB
fBS rx sensitivity −104dB
fBS handover threshold (QHO) 134.2dB
Simulation movement count 100000
Path loss factor (Lr) 36, 24
Reference point loss (L0) 40.2dB
Path loss exponent (c) 4.2
Probability of known point (p) 0.15
Ping-pong handover threshold (QPP ) 4steps
where wi is the coefficient for the path loss of point i anddefined as follows:
wi = W di (6)
where W is the coefficient which is a parameter for this paperto study the effect of W on the estimation error. di stands forthe distance between current point and point i. In this paper,the effect of di is also studied. For the scenario depicted in Fig.3, unlike the conventional approach, although the path loss issmaller than QHO at steps 3 and 4, the proposed algorithm donot start handover procedure if P̃(u,F (u)) > QHO.
IV. PERFORMANCE EVALUATION
Once the theoretical concepts of femtocell-based networks,ordinary Kriging and the proposed algorithm have been ex-plained, the next step is to obtain results in order to under-stand how proposed approach could be useful for handoverscenarios. We perform several experiments to evaluate theperformance of proposed handover algorithm with spatialestimation of path loss using ordinary Kriging approach. Thescenario is similar to the one depicted in Fig. 1, with one mBSand one fBS with several MS. In the experiments, proposedalgorithm is compared with conventional approach. The mainidea of the conventional handover algorithm is to compare themeasured path loss pu at location u with a predefined thresholdQHO to decide whether to start handover procedure or not.The simulation parameters used in the experiments are shownin Table I.
A. Simulation Models
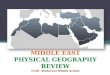
The path loss distribution map of the considered topologyis depicted in Fig. 4. The fBS network is located within thecoverage region of the mBS. Therefore only the path lossdistribution map of fBS is displayed. The topology is builtover an area of 50x50 m2 with several types of walls. In orderto simulate all movements of a MS, then the area is dividedinto 200x200 grid where each small square is 0.25x0.25 m2.Then for each location in the grid, path loss value is calculatedaccording to the general empirical path loss model which isalso adopted in [14]. The path loss model is defined as follows:
P (d) = P0 + 10c log10(d) (7)
where P0 is the initial path loss of a location and measuredat one meter (m) distance away from the base station, c is
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
−100
−90
−80
−70
−60
−50
−40
−30
−20
−10
Fig. 4. Path Loss Distribution of fBS
the path loss exponent that determines how the environmentaffects path loss and d is the distance in meter from the basestation. After calculating the path loss of the entire locations in200x200 grid, some of these locations assumed to be knownlocations with a probability p and the remaining locationsassumed to be unknown locations. By the help of ordinaryKriging, the path loss of these unknown locations will beestimated from the path loss of known locations. We used asimple mobility model for simulating MS movements whichis based on random waypoint model.
B. Simulation Results
There are two parameters which are analysed in this paper.These are the total number of handovers and the rate ofping-pong handovers. Ping-pong handovers are determinedaccording to a predefined threshold QPP . If the connectionduration of a MS after a handover is less than QPP anda handover occurs, then this handover is called a ping-ponghandover. In order to increase the performance of femtocell-based networks, both of these parameters should be minimized.
The simulation results are depicted in Fig. 5 and Fig. 6which are the normalized values in the range [0, 100]. Asfor the number of handovers, in Fig. 5, it is shown that theproposed technique was about 3.5% better than conventionalhandover method. For the conventional handover scheme,because it is not considering future points, the number ofhandovers does not change with distance. As it is expected,when coefficient W gets smaller, the distance value that thenumber of handovers becomes constant gets smaller. The rateof ping-pong handovers, in Fig. 6, shows similar but betterresults. It is because in indoor environments, our proposedtechnique is able to catch ping-pong handovers like the sit-uation depicted in Fig. 3 with considering future points onits movement paths. The proposed technique shows lower rateof ping-pong handover conditions which was about 9% betterthan conventional handover technique.
V. CONCLUSION
This paper presents a path loss-based handover predic-tion algorithm to make handover decision by using pathloss measurement reports from mobile stations. The proposedmechanism includes a spatial estimation of path loss step thatdepends on ordinary Kriging using Semivariogram Analysis.
2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom)
147
![Page 5: [IEEE 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) - Odessa, Ukraine (2014.5.27-2014.5.30)] 2014 IEEE International Black Sea Conference](https://reader036.pdfslide.us/reader036/viewer/2022092701/5750a5d31a28abcf0cb4e13d/html5/thumbnails/5.jpg)
0 1 2 3 4 5 6 7 8 9 1096
96,5
97
97,5
98
98,5
99
99,5
100
Distance
Th
e N
um
ber
of
Han
do
vers
Conv.
W=0.9
W=0.7
W=0.5
W=0.3
Fig. 5. The Number of Handovers
0 1 2 3 4 5 6 7 8 9 1090
91
92
93
94
95
96
97
98
99
100
Distance
Pin
g−
Pong H
andover
Conv.
W=0.9
W=0.7
W=0.5
W=0.3
Fig. 6. The Rate of Ping-pong Handovers
This method is composed of two parts: first calculate mobilestation’s newly defined path loss and then compare this valuewith the predefined threshold to make a handover decision. Thenewly defined path loss is calculated by considering the pathloss of future locations which are the locations that the mobilestation will most likely reach in the future. Numerical resultsdemonstrate that the proposed handover scheme is superior toconventional handover scheme from the viewpoints of bothunnecessary handover number and ping-pong handover rate.
REFERENCES
[1] P. Tarasak, K. Adachi and S. Sun, “Cell Selection for TDD Two-TierCellular Networks Based on Uplink-Downlink Capacity,” in WirelessCommunications and Networking Conference, pp. 2016-2021, April2013.
[2] J. Moon, D. Cho, “Efficient Handoff Algorithm for Inbound Mobility inHierarchical Macro/Femto Cell Networks,” in IEEE Comm. Lett., Vol.13, Iss. 10, pp. 755-757, 2009.
[3] Y. J. Kwon, D. H. Cho, “Load Based Cell Selection Algorithm forFaulted Handover in Indoor Femtocell Network,” in IEEE 73rd VehicularTechnology Conference (VTC-Spring), 2011, pp. 1-5.
[4] J. S. Kim., T. J. Lee, “Handover in UMTS networks with hybrid accessfemtocells,” in International Conference on Advanced CommunicationTechnology (ICACT), 12th, Feb. 2010, pp. 904-908.
[5] S. Wu, X. Zhang, et al., “Handover Study Concerning Mobility in theTwo Hierarchy Network,” in Vehicular Technology Conference, 2009.VTC Spring 2009. IEEE 69th, 2009, pp. 1-5.
[6] H. Ge, X. Wen, W. Zheng, Z. Lu, B. Wong, “A History-Based HandoverPrediction for LTE Systems” in Computer Network and MultimediaTechnology, 2009. International Symposium on, CNMT, 2009, pp. 1-4.
[7] T. Hyong, Q. Yang, J. Lee, S. Park, Y. Shin, “A Mobility ManagementTechnique with simple Handover Prediction for 3G LTE Systems,” inVehicular Technology Conference, IEEE 66th, 2007, pp 259-263.
[8] C. R. Anderson, T. S. Rappaport, “ In-building wideband partition lossmeasurements at 2.5 and 60 GHz,” in Wireless Communications, IEEETransactions, vol. 3, pp 922-928, May. 2004.
[9] R. Madan et al, “ Cell association and interference coordination inheterogeneous LTE-A cellular networks,” in IEEE Journal on SelectedAreas in Communications, vol. 28, no. 9, pp. 14791489, Dec. 2010.
[10] K. Kitao, S. Ichitsubo, et al., “Path Loss Prediction Formula forUrban and Suburban Areas for 4G Systems,” in Vehicular TechnologyConference, 2006. VTC 2006-Spring. IEEE 63rd, vol. 6, pp. 2911-2915,May. 2006.
[11] S. Phaiboon, et al., “An Empirically Based Path Loss Model forIndoor Wireless Channels in Laboratory Building Supachai Phaiboon,”in TENCON ’02. Proceedings. 2002 IEEE Region 10 Conference onComputers, Communications, Control and Power Engineering, vol. 2,pp. 1020-1023, Oct. 2002.
[12] A. Konak, et al., “A kriging approach to predicting coverage in wirelessnetworks,” in International Journal of Mobile Network Design andInnovation, vol. 3, pp. 65-71, Jan. 2009.
[13] I. Clark, et al., “Practical Geostatistics (1979),” in Online Available:”http://www.kriging.com/PG1979/ .
[14] A. Konak, et al., “Estimating Path Loss in Wireless Local AreaNetworks Using Ordinary Kriging,” in Simulation Conference (WSC),Proceedings of the 2010 Winter, pp. 2888-2896, Dec. 2010.
[15] 3GPP, TS36.420, “X2 general aspects and principles,” Dec. 2008.
2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom)
148