Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mitigating the effect of multipath interference](https://reader036.pdfslide.us/reader036/viewer/2022073113/5750a6141a28abcf0cb6d519/html5/thumbnails/1.jpg)
PROCEEDINGS OF SYMPOL-2013
Mitigating the Effect of Multipath Interference in Shallow
Water Acoustic Channels Ananya Sen Gupta1, Albert Williams2
1 University of Iowa. [email protected] 2 Woods Hole Oceanographic Institution. [email protected]
Abstract—Non-stationary reflections from moving sea surface, along with unpredictable oceanographic phenomena such as surface wave focussing render multipath interference in shallow water acoustics difficult to model or track in real time. Traditional equalization techniques have met limited success in underwater acoustic communications due to these rapid channel fluctuations as well as time-varying sparsity of the multipath delay spread. In this work, we examine these key challenges in the context of shallow water acoustic channel equalization. Results are also presented based on experimental field data collected at 200 meters range, 15 meters depth and moderate to rough sea conditions.
Index Terms—equalization, time-variability, sparse sensing
1. Introduction
Mitigating multipath interference poses a fundamental challenge to high data-rate shallow water acoustic communications. Acoustic transmissions reach the receiving hydrophone via direct path, as well as multiple reflections from the moving sea surface, other reflectors in the ocean, as well as highly diffused reflections from the sea bottom [1-4]. Figure 1 illustrates the multipath arrivals graphically using the ray model of underwater acoustic propagation.
In an ideal situation, the energy of the direct arrival from the transmitter to receiver would be sufficiently strong against the accumulated interference from multipath arrivals. In reality, however, the accumulated energy from non-stationary multipath as well as sparse but high-energy interference such as from surface focusing [5], limit the ability of standard communication receivers to decorrelate the
desired direct signal from inter-symbol interference due to multipath in the shallow water acoustic channel.
Figure 1: Ray model of multi-path arrivals in shallow water acoustic channels.
In this work, we explore the limitations of conventional equalization and related
![Page 2: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mitigating the effect of multipath interference](https://reader036.pdfslide.us/reader036/viewer/2022073113/5750a6141a28abcf0cb6d519/html5/thumbnails/2.jpg)
Sen Gupta, Williams – Mitigating the Effect of Multipath Interference in Shallow Water Acoustic Channels
interference mitigation techniques in the underwater communications literature, and propose novel directions to overcome interference imposed by rapidly fluctuating long delay spreads. We focus on shallow water environments with little or no change in sound velocity so that the ray model of sound propagation may be safely applied.
2. Equalization Challenges in Shallow Water Channels
Inter-symbol interference (ISI) is commonly encountered in most communication systems and a rich literature exists regarding equalization techniques to mitigate multipath interference in wireless communications [6,7]. The primary challenges of applying conventional equalization to shallow water acoustics, as outlined in Section 1, is three-fold: (i) the dynamic non-stationary nature of the channel delay spread, (ii) the length of the channel itself, and (ii) the sparse distribution of significant channel coefficients. Let us examine these issues individually.
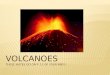
Figure 2 demonstrates the estimated channel delay spread over five seconds using a least squared error (LS) estimator (ref. e.g. [6,7] and references therein). Each column along the y-axis plots the channel impulse response, ie., the delay spread (in milliseconds) for each time instant along the x-axis. We note that the length of the channel delay spread varies between 10 to 15 milliseconds with three conspicuous regions: (i) the direct arrival, which carries the symbol to be decoded, (ii) the primary band of multipath arrivals, due to combinations of single surface reflection and multiple reflections from sea bottom, and (iii) secondary band of multipath arrivals, due to multiple reflections from the moving sea surface along with multiple reflections from the sea bottom.
We note that significant energy bursts due to surface wave focusing [5] occur sparsely across the support of the primary multipath band.
Figure 2: Time-varying channel delay spread over experimental field data collected at 15 meters depth and 200 meters range. (Data courtesy: James Preisig, Woods Hole Oceanographic Institution, SPACE08 experiment)
Additionally, both multipath bands exhibit significant time-variability across the channel delay taps, with typically more attenuation in the secondary multipath band due to larger number of multiple reflections between the ocean surface and bottom.
The challenge to equalization is therefore, mitigate the effect of long channel delay spread that also exhibits sparse high-energy events due to oceanographic focusing phenomena.
3. Combining dynamic sparse sensing with equalization
Recent advances in acoustic communications (ref. e.g. [4]) have demonstrated successful real-time tracking of the dynamic underwater acoustic channel across the different multipath bands using computationally efficient sparse optimization techniques [4,8-10]. The scope of this work is to harness these sparse optimization techniques in combination with equalization techniques in the wireless communications literature for effective real-time ISI mitigation in shallow water acoustic channels.
![Page 3: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mitigating the effect of multipath interference](https://reader036.pdfslide.us/reader036/viewer/2022073113/5750a6141a28abcf0cb6d519/html5/thumbnails/3.jpg)
PROCEEDINGS OF SYMPOL-2013
The key idea behind our proposed equalization technique is to apply the concept of multi-user interference cancellation [11] non-consecutively across the primary interferers at a given time instant.
3.1 System Model and Notation Let the received signal at time t for a
channel with K delay taps be modeled as:
where at any given time step the channel h(t) may be decomposed into significant and non-significant channel components hΠ(t) and h
Πc (t) based on the energy in the individual delay taps. Mathematically, this may be expressed as:
The channel components hΠ(t) and hΠc (t) may
not constitute contiguous delay taps and vary from one time step to the next due to the dynamic and sparse nature of the channel. Accordingly, the data stream is denoted as dΠ(t) and d
Πc (t) respectively. We employ standard linear equalizers such as the linear minimum mean squared error (LMMSE) [12] and sparse channel estimators [4,10] to arrive at soft decisions based on the received signal and last channel estimate. Then we employ channel shortening using a local maximum likelihood (LML) decoder [13] to reach improved estimates on the data symbols corresponding to significant channel delay taps hΠ(t) , as shown in Figure 3. The final decision is made merging the improved estimates on ˆ d Π(t) with preliminary estimates (“soft decisions”) on data symbols d
Πc (t) at the output of the LMMSE buffer. We note that the LMMSE needs to pursue preliminary estimates using the whole channel h(t) because by design, the memory buffer storing the estimates is not cognizant of
non-contiguous symbols which belong to different categories of delay taps.
Figure 3: Block diagram of proposed equalizer.
4. Results
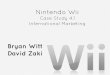
As preliminary results we present the performance of an equalizer (ref. Figure 4), which essentially employs the above scheme, classifying the most significant tap as the direct arrival, and the rest of the delay taps as h
Πc (t) . The channel estimator used compares YALL1 [10] and NCMNS [4] mixed norm sparse optimization algorithm. The bit-error-rate is plotted as a function of the sparsity factor λ, the regulation parameter used to balance between the extremes of very sparse and not-sparse in mixed norm optimization algorithms [4,8-10]. The higher values of the sparsity factor indicate less sparse solutions for the channel. Detailed discussion of how the channel estimate performance depends on the sparsity factor is covered in [4] and beyond the scope of this work.
y(t) = hi(t)d(t − i +1)i=1
K
, (1)
h(t) = [h1(t),L ,hK (t)]
= [hΠ(t),hΠc (t)]. (2)
![Page 4: [IEEE 2013 International Symposium on Ocean Electronics (SYMPOL) - Kochi, India (2013.10.23-2013.10.25)] 2013 Ocean Electronics (SYMPOL) - Mitigating the effect of multipath interference](https://reader036.pdfslide.us/reader036/viewer/2022073113/5750a6141a28abcf0cb6d519/html5/thumbnails/4.jpg)
Sen Gupta, Williams – Mitigating the Effect of Multipath Interference in Shallow Water Acoustic Channels
Figure 4: Performance of a CE-DFE equalizer over experimental field data collected at 15 meters depth and 200 meters range. (Data courtesy: James Preisig, WHOI, Sept. 2008)
The soft residual error, defined as the residual between predicted value of received signal with last estimated bit values and actual observed y(t) is plotted alongside and we observe relative parity between the two types of errors as is to be expected. We note that the two algorithms have different performance over different values of λ, with NCMNS exhibiting significant robustness with respect to changes in the sparsity factor and overall performance. Current research efforts are focused on employing higher complexity LML decoders to include most of the significant delay taps to capture higher cardinality of hΠ(t) .
ACKNOWLEDGMENTS The authors would like to thank Dr. James
Preisig, Woods Hole Oceanographic Institution, for providing experimental field data collected at the SPACE08 experiment. The SPACE08 experiment was conducted by Dr. James Preisig, Woods Hole Oceanographic Institution, and was supported by ONR Grants N000140710738, N000140510085, N000140710184, and N000140710523.
References
[1] P. Bello, “Characterization of randomly time-variant linear channels”, IEEE Trans. Commun. Sys. CS-11, 360–393 (1963). [2] P. Bello, “Joint estimation of delay, Doppler, and Doppler rate”, IRE Trans. Info. Th. 6, 330–341 (1960). [3] W. Li and J. C. Preisig, “Estimation of rapidly time-varying sparse channels”, IEEE J. Ocean. Eng. 32, 927 – 939 (2007). [4] A. Sen Gupta and J. Preisig, “A geometric mixed norm approach to shallow water acoustic channel estimation and tracking”, Elsevier J. in Phy. Comm., Spl. Iss. Compressive Sensing in Comm. 5, 119–128 (2012). [5] J. Preisig and G. Deane, “Surface wave focusing and acoustic communications in the surf zone”, J. Acoust. Soc. Am. 116, 2067–2080 (2004). [6] J.K. Nelson, “Mitigating the effects of intersymbol interference: Algorithms and Anal- ysis,” Ph.D. dissertation, Univ. of Illinois at Urbana-Champaign, Oct. 2005. [7] S. Benedetto and E. Biglieri, Principles of Digital Transmission with Wireless Applications. Boston, Massachussetts: Kluwer Academic/Plenum Publishers, 1999. [8] D. Donoho, “Compressed sensing”, IEEE Trans. Info.Th. 52, 1289 – 1306 (2006). [9] E. Candes and T. Tao, “Decoding by linear programming”, IEEE Trans. Inform. Theory 51, 4203–4215(2005). [10] J. Yang, Y. Zhang, Alternating direction algorithms for L1-problems in compressive sensing, Technical Report, Dept. of Math., Nanjing Univ., Nanjing, China, 2009. [11] A. Duel-Hallen, J. Holtzman, and Z. Zvonar, “Multiuser detection for CDMA systems,” IEEE Trans.Comm., vol. 43, no. 2/3/4, p. 4658, Apr. 1995. [12] U. Madhow and M. L. Honig, “MMSE interference suppression for direct-sequence spread spectrum CDMA,” IEEE Trans. Comm., vol. 42, pp. 3178–3188, Dec. 1994. [13] Y. Sun, “Local maximum likelihood multiuser detection,” Proc. CISS 2001, Baltimore, pp. 7–12.