Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/1.jpg)
The State-Dependent Broadcast Channel with
Cooperation
Lior Dikstein
Ben Gurion University of the Negev
Haim H. Permuter
Ben Gurion University of the Negev
Yossef Steinberg
Technion
Abstract—In this paper, we investigate problems of commu-nication over physically-degraded, state-dependent broadcastchannels (BC) with cooperating decoders. Three different setupsare considered and their capacity regions are characterized.First, we study a setting where noncausal state information isavailable to the encoder and the strong decoder. Furthermore,the strong decoder can use a finite capacity link to sendthe weak decoder information regarding the messages or thechannel state. Second, we examine a setting where the encoderand the strong decoder both have access to noncausal stateinformation, while the weak decoder has access to rate-limitedstate information. This scenario can be interpreted as a specialcase, where the strong decoder can only cooperate to send theweak decoder rate-limited information about the state sequence.A third case we consider, is a cooperative setting where stateinformation is available only to the encoder in a causal manner.Finally, we discuss the optimality of using rate-splitting whencoding for cooperative BC. In particular, we prove that rate-splitting is not necessarily optimal when coding for cooperativeBC and solve an example where a multiple-binning codingscheme outperforms rate-splitting.
Index Terms—Binning, broadcast channels, causal coding,channel capacity, cooperative broadcast, degraded broadcastchannel, noncausal coding, partial side information, side infor-mation, state-dependent channels.
I. INTRODUCTION
Classical broadcast channels adequately model a variety
of practical communication scenarios such as cellular sys-
tems, wireless Wi-Fi routers and digital TV broadcasting.
However, the rapid growth of wireless networking motivates
us to expand the study of such channels and to consider
more complex settings which can more accurately describe
a wider range of scenarios. Some of these important ex-
tensions include settings where the broadcast channel is
state-dependent. Wireless channels with fading, jamming or
interference in the transmission are just a few examples
that can be modeled by the state-dependent settings. Other
important extensions include cooperation between different
nodes in the network. Here, the nodes are able to assist
one another in decoding. These settings can, inter alia,
describe sensor networks, in which a large number of nodes
conduct measurements on some ongoing process and wish to
help each other to successfully decode the messages. Some
practical sensor network applications include surveillance,
1This work was supported by the Israel Science Foundation (grant no.684/11).
health monitoring and environmental detection. Therefore,
the results presented in this work help to meet the grow-
ing need to find the fundamental limits of such important
communication scenarios.
State-dependent channels were first introduced by Shan-
non [1] who characterized the capacity for the case where
a single user channel, PY |X,S , is controlled by a random
parameter S, and the state information sequence at time i,si, is known causally at the encoder. The case where the full
realization of the channel states, sn, is known noncausally
at the encoder was studied by Gel’fand and Pinsker in [2],
where they derived the capacity of the channel. Many studies
regarding state-dependent multi-user channels have been per-
formed in recent years. Some examples considering multiple
access channels (MAC) include the works of Lapidoth and
Steinberg [3], [4], Piantanida, Zaidi and Shamai [5], Somekh-
Baruch, Shamai and Verdu [6] and many more. However,
while state-dependent MACs have been widely studied and
capacity regions, upper bounds and achievable rates were
derived for many cases, much less is known regarding
broadcast channels. Steinberg studied the degraded, state-
dependent BC in [7]. Inner and outer bounds where derived
for the case where the state information is known noncausally
at the encoder and the capacity region was found for the case
where the states are known causally at the encoder, or known
noncausally at the encoder as well as the strong decoder.
Our channel setting with cooperation naturally extends this
model, and the capacity results of this paper generalize the
capacity regions found in [7].
Other important settings regarding state-dependent chan-
nels are cases where only rate-limited state information
is available at the encoder or decoder. In many practical
systems, information on the channel is not available freely.
Thus, in order to provide side information on the channel
state to the different users, we must allocate resources such
as time slots, bandwidth and memory. Heegard and El Gamal
[8] presented a model of a state-dependent channel, where
the transmitter is informed of the state information at a
rate-limited to Re and the receiver is informed of the state
information at a rate-limited to Rd. Cover and Chiang [9]
extended the Gel’fand-Pinsker problem to the case where
both the encoder and the decoder are provided with different,
but correlated, partial side information. Steinberg in [10]
derived the capacity for a channel where the state information
1307978-1-4799-3410-2/13/$31.00 ©2013 IEEE
Fifty-first Annual Allerton ConferenceAllerton House, UIUC, Illinois, USAOctober 2 - 3, 2013
![Page 2: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/2.jpg)
is known fully to the encoder in a noncausal manner and
is available rate-limited at the decoder. Coding for such a
channel involves solving a Gel’fand-Pinsker problem as well
as a Wyner-Ziv problem [11] simultaneously. An extension of
this setting to a degraded, state-dependent BC is introduced
in this work.
Cooperation between different users in multi-user channels
was first considered for MACs in the work of Willems
[12]. Further studies involving cooperation between encoders
in MACs include papers such as [13], [14] and [15]. A
setting where cooperation between users takes place in a
state-dependent MAC, where the partial state information in
known to each user and full state information is known at
the decoder, was treated by Permuter Shamai and Somekh-
Baruch in [16].
The notion of cooperation between receivers in a BC was
proposed by Dabora and Servetto [17]. In their paper, they
characterize the capacity region for the cooperative degraded
BC. The direct part combines methods of broadcast coding
and code constructions for the degraded relay channel. The
degraded, state-dependent BC setting we present in this
work generalizes Dabora and Servetto’s model. Hence, our
capacity result generalizes the result of [17]. However, we
propose a different coding scheme, which uses triple-binning
and superposition coding techniques. We show that this
coding scheme can also be applied to achieve the capacity
of the cooperative degraded BC setting presented in [17].
In this work, we consider several scenarios of cooperation
between decoders for physically degraded, state-dependent
(PDSD) BCs. First, we consider a setting where there is no
limit on when the cooperation link between the decoders,
C12, should be used. For this setting we characterize the
capacity region for the noncausal case, where noncausal
state information is known at the encoder and the strong
decoder, as well as for the causal case, where causal state
information is available at the encoder. Here, it turns out
that the optimal schemes use the cooperation link between
the decoders, C12, solely for sending additional information
about the messages. I.e., information about the state sequence
is not sent explicitly via C12. The second setting we consider
is a case where the cooperation link C12 can be used only
before the outputs are given. In such a case, the strong
decoder can only use the cooperation link to convey rate
limited state information to the weaker user. This can be
regarded as a broadcast extension of the results in [10]. The
capacity region for this case is derived, using the methods
we developed when solving the first scenario, combined with
Wyner-Ziv coding.
Another interesting result concerns the use of rate-splitting
techniques when coding for cooperative BC. In MACs, rate-
splitting is the preferred coding method and it has been
used to achieve the capacity of most of the settings that
have been solved. Hence, a first guess would be to use
such methods when coding for cooperative BC. However, we
prove that rate-splitting schemes are not necessarily optimal
for this class of channels. Moreover, we show that other
techniques, such as binning, strictly outperform rate-splitting.
An example for which rate-splitting is demonstrated to be
suboptimal is solved for the binary symmetric BC with
cooperation.
The remainder of the paper is organized as follows.
Section II presents the mathematical notation used in this
paper. In Section III, all the main results are stated, which
include the capacity regions of three PDSD BC settings.
Section III-A is devoted to the noncausal PDSD BC and
the discussion of special cases, Section III-B is dedicated
to the causal PDSD BC and Section III-C is dedicated to
the PDSD BC with rate-limited state information. In Section
IV, we discuss the optimality of using rate-splitting methods
when dealing with cooperating BC. Finally, in Section IV-A,
we give an example of a cooperative BC where rate-splitting
is suboptimal.
II. NOTATION AND PROBLEM DEFINITION
A
B
Si
Sn
MZ
MY
EncoderXn
PY,Z|X,S =
PY |X,SPZ|Y
Y n
Zn
Decoder Y
Decoder Z
C12
MY
MZ
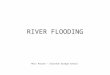
Fig. 1. The physically degraded, state-dependent broadcast channel withcooperating decoders.
In this paper, random variables are denoted with upper
case letters, deterministic realizations or specific values are
denoted with lower case letters and calligraphic letters denote
the alphabets of the random variables. Vectors of n elements,
i.e. xn = (x1, x2, ..., xn) are denoted as xn and xji denotes
the i−j+1-tuple (xi, xi+1, ..., xj) when j ≥ i and an empty
set otherwise. The probability distribution function of X , the
joint distribution function of X and Y and the conditional
distribution of X given Y will be denoted by PX , PX,Y and
PX|Y , respectively.
A PDSD BC, (S, PS(s),X ,Y,Z, PY,Z|X,S(y, z|x, s)), il-
lustrated in Fig. 1, is a channel with input alphabet X ,
output alphabet Y × Z and a state space S. In addition,
the channel probability function can be decomposed as
PY,Z|X,S = PY |X,SPZ|Y , i.e Z−Y −(X,S) form a Markov
chain.
Definition 1:
1) A C12 conference between Decoder Y and Decoder
Z is defined by a conference message set M12 ={1, 2, ..., 2nR12} and a mapping function
h12 : Yn × Sn → M12 (1)
1308
![Page 3: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/3.jpg)
which maps the received output Y n and the channel
state, Sn, known at the decoder, to a message M12 ∈{1, 2, ..., 2nR12}, which is transmitted to Decoder Z.
2) A C12-admissible conference is a conference that sat-
isfies R12 ≤ C12.
Definition 2: A ((2nRZ , 2nRY ), 2nC12 , n) code for the
PDSD broadcast channel consists of two sets of integers,
MZ = {1, 2, ..., 2nRZ} and MY = {1, 2, ..., 2nRY }, called
message sets. An index is chosen uniformly and indepen-
dently by the senders out of the message sets. The encoder
selects a channel input sequence, Xn = Xn(MZ ,MY , Sn).
The outputs of the channel at Decoder Y and Decoder Z
are denoted Y n and Zn, respectively. The channel is char-
acterized by the conditional probability p(yi, zi|xi, si) and is
assumed to be memoryless. Therefore, both probabilities do
not depend on the index i, i.e.
p(yi, zi, si+1|xi, si) = p(yi|xi, si)p(zi|yi)p(si+1). (2)
The code for the noncausal case (where switch A is closed)
is defined by the encoding function
f : MZ ×MY × Sn → Xn, (3)
a C12-admissible conference
h12 : Yn × Sn → M12, (4)
and two decoding functions
gy : Yn × Sn → MY (5)
gz : Zn ×M12 → MZ . (6)
For the causal case (where switch A is open and switch Bis closed) the encoding function f is replaced by
f : MZ ×MY × Si → Xn, (7)
and Decoder Y’s decoding function is replaced by
gy : Yn → MY . (8)
In definition 2 there is no restriction on when the link
C12 can be used. However, if we restrict the link to be used
before the sequence Y n is given to the strong decoder, then
only information on the state sequence, Sn, can be sent there.
This is the subject of the next definition.
Definition 3: A ((2nRZ , 2nRY ), 2nRd , n) code for the
PDSD broadcast channel with rate-limited side informa-
tion at the weak decoder, illustrated in Fig. 2, consists
of three sets of integers, MZ = {1, 2, ..., 2nRZ} and
MY = {1, 2, ..., 2nRY }, called message sets, and index
T = {1, 2, ..., 2nRd}. The code is defined by two encoding
functions: a channel encoding function
f : MZ ×MY × Sn → Xn, (9)
and a state encoding function
fs : Sn → T , (10)
and two decoding functions
gy : Yn × Sn → MY (11)
gz : Zn × T → MZ . (12)
Definition 4: We define the average probability of error
for a ((2nRZ , 2nRY ), 2nC12 , n) code as follows:
P (n)e = Pr
(
(MY 6= MY ) ∪ (MZ 6= MZ))
. (13)
The average probability of error at each receiver is defined
as
P (n)e,y = Pr(MY 6= MY ) (14)
P (n)e,z = Pr(MZ 6= MZ). (15)
As is commonly held when discussing broadcast channels,
the average probability P(n)e goes to zero as n approaches
infinity, iff P(n)e,y and P
(n)e,z both go to zero as n approaches
infinity.
Definition 5: A pair rate (RZ , RY ) is achievable if there
exists a sequence of codes ((2nRZ , 2nRY ), 2nC12 , n) such
that P(n)e → 0 as n → ∞.
Definition 6: The capacity region is the closure of all
achievable rates.
Sn
MZ
MY
EncoderXn
PY,Z|X,S =
PY |X,SPZ|Y
Y n
Zn
Decoder Y
Decoder Z
Rate ≤ Rd
MY
MZ
State
Encoder
Sn
Fig. 2. The physically degraded, state-dependent broadcast channel withfull state information at the encoder and one decoder together with rate-limited state information at the other decoder. This model describes thecase where the cooperation between the decoders is confined to take placeprior to the decoding of the messages. Therefore, the only information thatthe strong decoder, Decoder Y, can send to the weaker decoder, DecoderZ, is about the state sequence. However, the state is only partially availableat Decoder Z, since it is sent rate-limited due to the limited capacity of thelink between the decoders.
III. MAIN RESULTS AND INSIGHTS
A. Capacity Region of the PDSD Broadcast Channel with
Cooperating Decoders
We begin by stating the capacity region for the PDSD BC
illustrated in Fig. 1 (switch A is closed) in the following
theorem.
Theorem 1: The capacity region of the PDSD BC,
(X,S)− Y −Z , with noncausal state information known at
the encoder and at Decoder Y and with cooperating decoders
1309
![Page 4: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/4.jpg)
is the closure of the set that contains all the rates (RZ , RY )that satisfy
RZ ≤ I(U ;Z)− I(U ;S) + C12 (16a)
RY ≤ I(X ;Y |U, S) (16b)
RZ +RY ≤ I(X ;Y |S), (16c)
for some joint probability distribution of the form
PS,U,X,Z,Y = PSPU|SPX|S,UPY,Z|X,S . (17)
The achievability of Theorem 1 is proved using techniques
that include triple-binning and superposition coding. The
main idea is to identify how to best use the capacity link
between the decoders. In particular, we want to maximize
the potential use of the capacity link and simultaneously
successfully balance the allocation of rate resources between
both messages. The allocation of resources between the
message intended for Decoder Y, MY , and the message
intended for Decoder Z, MZ , is possible due to the fact
that we use superposition coding. Using this coding method,
Decoder Y, which is the strong decoder, also decodes the
message intended for Decoder Z. This allows us to shift
resources and thus increase the rate resources of MZ at the
expense of the message MY . Decoder Y can then send its
additional information about MZ to Decoder Z using the
capacity link between them.
This additional information sent from Decoder Y to De-
coder Z comes into play by the use of binning. We can divide
the messages MZ amongst superbins in ascending order.
Next, we use a Gel’fand Pinsker code for each superbin.
Now, we can redirect some of the rate resources of the
message MY to send the superbin which contains MZ .
Decoder Y decodes both messages MY and MZ and sends
the superbin that contains MZ to Decoder Z through the
capacity link between the decoders. By fully utilizing this
capacity link, we can increase the rate to Decoder Z that
was achieved using the Gel’fand Pinsker coding scheme.
Nevertheless, if the capacity link between the decoders is
better then the channel itself, there is still a restriction on the
amount of information we can send. This emerges through
the bound on the rate sum, RZ + RY ≤ I(X ;Y |S). This
bound indicates that we cannot send more information about
(MY ,MZ) with this setting than the information we could
have sent about (MY ,MZ) through a state-dependent point-
to-point channel, where the state information is known at
both the encoder and decoder. Moreover, notice that
RZ +RY ≤ I(X ;Y |S) = I(U,X ;Y |S) (18)
= I(U ;Y |S) + I(X ;Y |U, S).
That is, if we have a large capacity link between the
decoders, we have a tradeoff between sending information
about MZ and MY . If we choose to send information about
MY at the maximal rate possible, I(X ;Y |U, S), then the
maximal rate we can send MZ is I(U ;Y |S). On the other
hand, we can increase the rate of MZ (up to the minimum
between I(U ;Z) − I(U ;S) + C12 or I(X ;Y |S)) at the
expense of reducing the rate of MY . This is reflected, for
example, if we have an infinite capacity link between the
decoders. In this case, we can consolidate the two decoders
into one decoder that wants to decode both messages. This is
exactly the case of a state-dependent point-to-point channel
with state information available at both the decoder and
encoder.
Another interesting insight is revealed when comparing the
result presented in Theorem 1 to the result of the physically
degraded broadcast channel with cooperating receivers pre-
sented in [17]. Let us consider a special case of our theorem
where S = ∅. For this case, the region (16) reduces to
RZ ≤ I(U ;Z) + C12 (19a)
RY ≤ I(X ;Y |U) (19b)
RZ +RY ≤ I(X ;Y ), (19c)
for some
PU,X,Z,Y = PX,UPY,Z|X .
This special case was considered in [17, Theorem 1], where it
was referred to as the physically degraded broadcast channel
with cooperating receivers (i.e., the broadcast channel model
where the channel is not state-dependent). In their paper, a
different expression for the capacity region was found:
RZ ≤ min{I(U ;Z) + C12 , I(U ;Y )} (20a)
RY ≤ I(X ;Y |U) (20b)
for some
PU,X,Z,Y = PX,UPY,Z|X .
Therefore we can infer that the two regions, (19) and
(20), are equivalent. It is easy to see that (19) contains (20),
since every pair (RZ , RY ) from (20) has to also satisfy (19).
The other side of the equality, proving (20) contains (19),
is not straightforward. We need to show that for every pair
(RZ , RY ) in (19) there exists a U such that (RZ , RY ) satisfy
(20). However, since the two regions have been proven to be
the capacity regions for the same setting, we can conclude
that they are, indeed, equivalent.
B. Causal Side Information
Consider the case where the state is known to the encoder
in a causal manner, i.e. at each time index, i, the encoder
has access to the sequence si. This setting is illustrated in
Fig. 1 where we take switch A to be open and switch Bto be closed. In this scenario, the encoder is the only user
informed of the state sequence, in contrary to the noncausal
case, where the strong decoder is also informed of the state
sequence. The capacity region for this setting is characterized
in the following theorem.
Theorem 2: The capacity region for the PDSD BC with
cooperating decoders and causal side information known at
the encoder is the closure of the set that contains all the rates
1310
![Page 5: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/5.jpg)
(RZ , RY ) that satisfy
RZ ≤ I(U ;Z) + C12 (21a)
RY ≤ I(V ;Y |U) (21b)
RZ +RY ≤ I(V, U ;Y ), (21c)
for some joint probability distribution of the form
PS,U,V,X,Z,Y = PSPU,V PX|S,U,V PY,Z|X,S . (22)
The proof of Theorem 2 follows closely the proof
of the noncausal case. We generate satellite codewords
vn(mY ,mZ) (instead of xn(mY ,mZ)) around each cloud
center un(mZ), where the codewords un are divided among
2nC12 superbins. To send (mY ,mZ), the encoder trans-
mits x(ui(mz), vi(mZ ,mY ), si) at time i ∈ {1, 2, ..., n}.
For decoding, the strong decoder, Decoder Y, decodes
the satellite codeword vn (and hence also the cloud
center un), i.e. it looks for an (mY , mZ) such that
(un(mZ), vn(mZ , mY ), y
n) ∈ T(n)ǫ (U, V, Y ). Decoder Y
then uses the link between the decoders to send Decoder
Z the number of the superbin which contains un. Decoder
Z now looks in this specific superbin for a unique mZ such
that (un(mZ), zn) ∈ T
(n)ǫ (U,Z).
C. Capacity Region of the PDSD BC with Rate-Limited State
Information at the Weak Decoder
We state the capacity region in the following theorem
Theorem 3: The capacity region of the PDSD BC,
(X,S) − Y − Z , with rate-limited state information at the
weak decoder, illustrated in Fig. 2, is the closure of the set
that contains all the rates (RZ , RY ) that satisfy
RZ ≤ I(U ;Z, Sd)− I(U ;S, Sd) (23)
RY ≤ I(X ;Y |U, S, Sd) (24)
for some joint probability distribution of the form
PS,U,X,Z,Y = PSPSd,U,X|SPY,Z|X,S (25)
such that
Rd ≥ I(S;Sd)− I(Z;Sd). (26)
Remark 1: As was noted in [10], we can replace the rate
bound on RZ in (23) with the bound:
RZ ≤ I(U ;Z|Sd)− I(U ;S|Sd). (27)
This can easily be seen by applying the chain rule on the
expressions on the righthand side of (23) as follows
I(U ;Z, Sd)− I(U ;S, Sd)
= I(U ;Sd) + I(U ;Z|Sd)− I(U ;Sd)− I(U ;S|Sd)
= I(U ;Z|Sd)− I(U ;S|Sd).
Due to lack of space, a full proof of the theorem is
not given. However, we will shortly describe the guide-
lines which combine similar methods as in the proof of
Theorem 1 and as developed in [10]. For the direct part,
the coding scheme that achieves the capacity region (23)-
(24) uses techniques that include Wyner-Ziv compression,
superposition coding and Gel’fand-Pinsker coding. The main
idea is based on a Gel’fand-Pinsker code, but with several
extensions. First, since the Channel Encoder and the strong
decoder, Decoder Y, know the state sequence sn and the
State Encoder’s strategy, they also know snd , the compressed
codeword that the State Encoder sends Decoder Z. The
encoder uses this knowledge to find a codeword un that is
jointly typical not only with sn, as in the original Gel’fand
Pinsker scheme, but also with snd . Each codeword un is the
center of 2nRY bins, one bin for each message mY . Once a
codeword un is chosen, we look in its satellite bin mY for
a codeword xn such that it is jointly typical with that un,
the state sequence sn and with snd . Upon transmission, the
State Encoder chooses a codeword snd , the Channel Encoder
chooses a codeword un and a corresponding xn, where xn
is transmitted through the channel. Consequently, identifying
xn at the decoder leads to the identification of un.
At the decoder’s end, the State Encoder sends Decoder
Z a compressed version of sn using the codewords sndin a Wyner-Ziv scheme. The side information available at
Decoder Z is the channel output zn. However, the joint
typicality of zn and snd is not due to a Markov Sd − S −Z ,
as in the Wyner-Ziv theorem, but as a result of the channel
Markov Z−Y −(X,S)−Sd and the fact that the codewords
xn are generated ∼∏n
i=1 p(xi|ui, sd,i). Finally, snd is used
as side information to identify the codeword un. As for
the strong decoder, Decoder Y looks for codewords un and
xn that are jointly typical with the received yn, the state
sequence sn and the codeword snd .
For the converse, the rate Rd is bounded similarly
to the Wyner-Ziv theorem where we identify Sd,i as
(T, Sni+1, Z
i−1). The upper bound on RZ proven in a similar
way to the converse presented in [10, Theorem 1], where we
identify Ui to be equal to MZ . Finally, the bound on RY is
proven similarly to Theorem 1, with some modifications.
IV. IS RATE-SPLITTING OPTIMAL FOR COOPERATION?
When dealing with cooperation settings, the most common
approach that comes to mind is the use of rate-splitting.
Many coding schemes based on rate-splitting have been
known to achieve the capacity of channels involving coop-
eration. For example, rate-splitting is the preferred coding
method when coding for cooperative MACs, and it has
been shown to be optimal. However, when dealing with
cooperative BC, we prove that rate-splitting schemes are
not necessarily optimal. Moreover, other techniques, such as
binning, strictly outperform rate-splitting.
The main idea of the rate-splitting scheme is to split
the message intended for the weaker decoder, MZ , into
two messages, MZ = (MZ1,MZ2
). Next, we reorganize
the messages. We concatenate part of the message intended
for the weak decoder, MZ2, to the message intended for
the strong decoder, MY . This lets us define new message
sets, M ′Z = MZ1
and M ′Y = (MY ,MZ2
), where we
1311
![Page 6: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/6.jpg)
choose MZ2to be of size ≤ C12. Now that we have a
new message set (M ′Z ,M
′Y ), send the messages using a
Gelfand-Pinsker superposition coding scheme, such as the
one described in [7]. Once the strong decoder decodes both
messages, (M ′Z ,M
′Y ) (which, in fact, equal (MZ ,MY )),
it uses the capacity link between the decoders, C12, to send
the message MZ2to the weak decoder. This scheme ends
up with the strong decoder decoding both messages and the
weak decoder decoding the original message MZ .
Using the achievability result of the capacity region found
in [7, Theorem 3] for the PDSD BC with state information
known at the encoder and decoder, as well as the fact that the
rate RZ2cannot be negative or greater then C12, we derive
the following bounds:
RZ2≤ C12 (28a)
RZ2≥ 0 (28b)
RZ1≤ I(U ;Z)− I(U ;S) (28c)
RY +RZ2≤ I(X ;Y |U, S) (28d)
RZ1+RZ2
+RY ≤ I(X ;Y |S). (28e)
Recalling that RZ = RZ1+RZ2
, we substitute RZ1with
RZ −RZ2in the bounds (28c) and (28e). Next, by using the
Fourier-Motzkin elimination, we eliminate the bounds that
contain RZ2, (28a), (28b) and (28d). The resulting region is
the following bounds on RZ and RY
RZ ≤ I(U ;Z)− I(U ;S) + C12 (29a)
RY ≤ I(X ;Y |U, S) (29b)
RZ +RY ≤ I(U ;Z)− I(U ;S) + I(X ;Y |U, S).(29c)
This region, (29), is the achievable region as a result of rate-
splitting.
We note that in the process we derive an additional bound
on the rate sum RZ + RY ≤ I(X ;Y |S). However, we can
see that this bound is satisfied automatically by satisfying
(29c) since
I(X ;Y |S) = I(U,X ;Y |S)
= I(U ;Y |S) + I(X ;Y |U, S)
= I(U ;Y, S)− I(U, S) + I(X ;Y |U, S)
≥ I(U ;Z)− I(U ;S) + I(X ;Y |U, S), (30)
where the last inequality is due to the degradedness prop-
erties of the channel. Moreover, we also omit the bound
C12 ≥ 0, which is trivial from the problem setting.
Examining the region (29), we notice that it has a different
form from the capacity region of this channel, (16). There-
fore, an interesting question arises; Are rate-splitting coding
schemes optimal for BCs with cooperating decoders? We
answer this question in the following lemma.
Lemma 4: Using a rate-splitting method for BCs with
cooperating decoders is not necessarily optimal.
Proof: We would like to show that the rate-splitting
coding scheme that derives the region (29) does not achieve
the capacity of the channel given by (16) in Theorem 1. In
order to do so, we need to show that the region (16) is strictly
larger then the region achievable by rate-splitting, (29). The
region (16) is shown to be achievable using triple-binning.
Hence, by showing that (16) is strictly larger then (29), we
can conclude that the rate-splitting method is not optimal.
Firstly, it is easy to see that the region (16) contains (29),
since the bounds on RZ and RY are the same, yet the bound
on the rate sum (16c) is greater than or equal to (29c), as
shown in (30).
However, to show that (16) is strictly larger than (29), we
need to show that for all distributions of the form (17):{
∃(RZ , RY ) ∈ (16) : (RZ , RY ) /∈ (29)}
. (31)
This is not an easy task. If we look at the regions in their
general form, we need to find a pair (RZ , RY ) ∈ (16)and show that for every random variable U we choose,
(RZ , RY ) /∈ (29). Nevertheless, we can show that (16) is
strictly larger then (29) by considering a specific channel
and showing that for this channel (29) ⊂ (16).
A. Rate-Splitting Achievable Region is not Optimal for the
Binary Symmetric Broadcast Channel
Consider the physically degraded binary symmetric BC,
[18, Section 5.3], illustrated in Fig. 4. Here, for some p1 <p2 < 1
2 , we have Y = X ⊕ W1, Z = Y ⊕ W2, where
W1 ∼Ber(p1), W2 ∼Ber( p2−p1
1−2p2
). This channel is a special
case of our setting, where the channel is not state-dependent
(hence, we take the state as a constant).
X
Y
Z
W1 ∼Ber(p1) W2 ∼Ber( p2−p1
1−2p2
)
Fig. 3. On the left hand side we have the binary symmetric broadcastchannel. On the right hand side we have the equivalent physically degradedversion.
Following closely the arguments given in [18, Section
5.4.2] we can upper bound the region (29) by considering
all the set of rate pairs (RZ , RY ) such that
RZ ≤ 1−H(α ∗ p2) + C12 (32a)
RY ≤ H(α ∗ p1)−H(p1) (32b)
RZ +RY ≤ 1−H(α ∗ p2) +H(α ∗ p1)−H(p1).(32c)
for some α ∈ [0, 12 ]. On the other hand, we can show that
by taking X = U ⊕ V , where U ∼Ber( 12 ) and V ∼Ber(α)
and calculating the corresponding expressions of (16), the
following region of rate pairs (RZ , RY ) such that
RZ ≤ 1−H(α ∗ p2) + C12 (33a)
RY ≤ H(α ∗ p1)−H(p1) (33b)
RZ +RY ≤ 1−H(p1). (33c)
is achievable via the binning scheme.
1312
![Page 7: [IEEE 2013 51st Annual Allerton Conference on Communication, Control, and Computing (Allerton) - Monticello, IL (2013.10.2-2013.10.4)] 2013 51st Annual Allerton Conference on Communication,](https://reader037.pdfslide.us/reader037/viewer/2022092715/5750a6c51a28abcf0cbc0e27/html5/thumbnails/7.jpg)
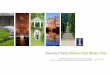
0 0.05 0.1 0.15 0.2 0.25 0.3 0.350
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
RY
RZ
Rate Region for C12
=0.03
Binning
Rate−splitting
Fig. 4. The upper bound on the region (29) which is calculated in (32)is plotted by the solid line and corresponds to the smaller region. Theachievable region for (16) given by the expressions in (33) is plotted by thedashed line and corresponds to the bigger region. Both regions are plottedfor values of p1 = 0.2, p2 = 0.3, and C12 = 0.3.
Consequently, we can observe that the region (33) is
strictly larger then the region (32). For example take p1 =0.2, p2 = 0.3 and C12 = 0.03. Looking at both regions, we
can see that taking RY to be zero, the point (RZ , RY ) =(0.1487, 0) is achievable in the binning region (33) (the
dashed line) for α = 0. However, it is not achievable in
the rate-splitting region (32) (the solid line) for any value of
α ∈ [0, 12 ].Hence, we have shown that when considering the binary
symmetric BC, an achievable region derived from the binning
coding scheme region by a specific choice of U is strictly
larger then an upper bound for the region (29). Therefore, we
can conclude that (16) is strictly larger then (29) and that the
rate-splitting coding scheme is not necessarily optimal when
dealing with BC.
REFERENCES
[1] C. E. Shannon. Channels with side information at the transmitter. IBM
J. Res. Devel., 2:289–293, 1958.[2] S. I. Gel’fand and M. S. Pinsker. Coding for channel with random
parameters. Probl. Contr. and Inf. Theory, 9(1):19–31, 1980.
[3] A. Lapidoth and Y. Steinberg. The multiple access channel with causaland strictly causal side information at the encoders. 2010.
[4] A. Lapidoth and Y. Steinberg. The multiple-access channel with causalside information: Common state. IEEE Trans. Inf. Theory, 59(1):32–50, 2013.
[5] P. Piantanida A. Zaidi and S. Shamai. Multiple access channel withstates known noncausally at one encoder and only strictly causally atthe other encoder. In CoRR, 2011. abs/1105.5975,.
[6] S. Shamai A. Somekh-Baruch and S. Verdu. Cooperative multiple-access encoding with states availavle at one transmitter. IEEE Trans
Inf. Theory, IT-54:4448–4469, Oct. 2008.
[7] Y. Steinberg. Coding for the degraded broadcast channel with randomparameters, with causal and noncausal side information. IEEE Trans
Inf. Theory, 51(8):2867–2877, August 2005.
[8] C. Heegard and A. A. El Gamal. On the capacity of computer memorywith defects. IEEE Trans. Inf. Theory, 29(5):731–739, 1983.
[9] T. M. Cover and M. Chiang. Duality between channel capasity and ratedistortion with two-sided state information. IEEE Trans. Inf. Theory,48(6):1629–1638, June 2002.
[10] Y. Steinberg. Coding for channels with rate-limited side informationat the decoder, with applications. IEEE Trans. Inf. Theory, 54:4283–4295, 2008.
[11] A. D. Wyner and J. Ziv. The rate-distortion function for source codingwith side information at the decoder. IEEE Trans. Inf. Theory, 22(1):1–10, January 1976.
[12] F. M. J. Willems. The discrete memoryless multiple channel withpartially cooperating encoders. IEEE Trans. Inf. Theory, 29(6):441–445, 1983.
[13] F. M. J Willems. Information-theoretical results for the discrete
memoryless multiple access channel. PhD thesis, 1982. Ph.D. Thesis.[14] H. V. Poor A. J. Goldsmith O. Simeone, D. Gunduz and S. Shamai.
Compound multiple-access channels with partial cooperation. IEEE
Trans. Inf. Theory, 55(6):2425–2441, 2009.[15] E. Amir and Y. Steinberg. Joint source-channel coding for cribbing
models. In Int. Symp. Information Theory (ISIT-12), pages 1952–1956,2012.
[16] S. Shamai H. Permuter and A. Somekh-Baruch. Message and statecooperation in multiple access channels. IEEE Trans Inf. Theory,57(10):6379–6396, 2011.
[17] R. Dabora and S. Servetto. Broadcast channels with cooperatingdecoders. IEEE Trans Inf. Theory, 52(12):5438–5454, December 2006.
[18] A.E. Gamal and Y.H. Kim. Network Information Theory. CambridgeUniversity Press, 2011.
1313