Embed Size (px)
Citation preview
![Page 1: [IEEE 2012 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC) - Shanghai, China (2012.03.27-2012.03.29)] 2012 Asia-Pacific Power and Energy Engineering Conference](https://reader043.pdfslide.us/reader043/viewer/2022020609/575082471a28abf34f985a60/html5/page/1.jpg)
tavtbvtcv
fR fL
fai fbifci
stavstbv
stcvdcv
dci
fd fqi ,i∗fdi
* *d qu ,u
dc ,refv
acvac ,refv
dRdcC
∗fqi
ciRdi
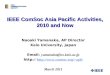
Fig. 1. Circuit diagram and control of the D-STATCOM system.
Design of Decoupling Current Control with Symmetrical Optimum Method for D-STATCOM
Kittaya Somsai and Thanatchai Kulworawanichpong*
School of Electrical Engineering Suranaree University of Technology
Nakhon Ratchasima, Thailand [email protected], [email protected]
* Corresponding author
Nitus Voraphonpiput Department of Power System Planning
Electric Generating Authority of Thailand Bangkok, Thailand [email protected]
Abstract— This paper presents the system modeling and controller design based on symmetrical optimal method for distribution static compensators (D-STATCOMs). The D-STATCOM model and its control are investigated. In this work, the current decoupling control based on the dq reference frame is determined. The symmetrical optimum method is applied to obtain the parameters of PI controllers. The response of the D-STATCOM current with and without the decoupling are compared and discussed.
Keywords; D-STATCOM, modeling, decoupling control, symmetrical optimum, dq reference frame.
I. INTRODUCTION In a power distribution system, controlled reactive power
sources are commonly used for load compensation. Due to their high control bandwidth, D-STATCOMs, based on three-phase pulse width modulation voltage source converters, have been proposed for this application [1] – [3]. For a fast control, the D-STATCOM is usually modeled using the dq axis theory for balanced three-phase systems, which allows definition of instantaneous reactive current and instantaneous magnitude of phase voltages [4]. In addition, the current controller design is developed using a rotating dq frame of reference that offers higher accuracy than the stationary frame techniques [5].
Most literature on the D-STATCOM and STATCOM control concentrates in control of the output current and DC voltage regulation for a given reactive current reference. The current decoupling control based on dq reference frame received considerable attention in [6] – [8]. The authors presented a remarkable advance by letting the d-axis always be coincident with the supply voltage; first prototypal control where active and reactive powers are decoupled was realized. In addition, an alternative approach using a linearized state space model in the D-STATCOM and STATCOM control design was proposed in [9] – [10].
In this paper, a modeling strategy similar base on the rotating dq reference frame is used. This gives a clear representation of instantaneous D-STATCOM current without any restriction on the dynamics. The D-STATCOM current decoupling control based on the dq reference frame is used. The symmetrical optimum design is applied to obtain the proportional gain and integral time of PI controllers. The response of the D-STATCOM current with and without the
decoupling are compared. Performance of the propose model and the controller design were verified using computer simulation performed in SIMULINK/MATLAB.
II. D-STATCOM MODELING The circuit diagram and control of the D-STATCOM
system are shown in Fig. 1. It consists of a three-phase voltage source converter (VSC), interfacing inductors, DC link capacitor, and its control system. In this figure, each switch represents a power semiconductor device and anti-parallel diode combination. The VSC is connected to the network through the transformer and the interfacing inductors which are used to filter high-frequency components of compensating
currents. The inductance describes the leakage inductance of the transformer and the interfacing inductors. The switching losses of a converter and the copper loss of the connecting transformer are represented by . In this paper, the objective is to rapidly regulate the active and reactive D-STATCOM current ( and ) to the reference value ( and ) that is generated by the DC voltage control and load voltage controller, respectively. However, to study the current control, it is noted that the DC voltage is kept constantly. It is assumed that the dynamics of the D-STATCOM are slower when compared to the switching frequency of the converter [11], therefore the D-STATCOM dynamics can be described as:
978-1-4577-0547-2/12/$31.00 ©2012 IEEE
![Page 2: [IEEE 2012 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC) - Shanghai, China (2012.03.27-2012.03.29)] 2012 Asia-Pacific Power and Energy Engineering Conference](https://reader043.pdfslide.us/reader043/viewer/2022020609/575082471a28abf34f985a60/html5/page/2.jpg)
, , , , (1) , , (2)
Here, is the D-STATCOM DC voltage, is the D-STATCOM output ac voltage, is the D-STATCOM output current, is the load voltage, while the subscript “abc” implies vectors consisting of individual phase quantities. Parameters in these equations are- DC link capacitance and
capacitor leakage resistance. Under the assumption that zero sequence components are not presented, (1) – (2) can be transformed to an equivalent two phase system by applying the following transformation:
⁄ ⁄ (3)
where the complex . This is followed by a rotational transformation: (4)
We choose the dq reference frame which is similar to that used for the field-oriented control of three-phase AC machines. Thus, the angle used in (4) is defined by tan ⁄ . This implies 0 0 (5)
After applying the three-phase to two phase transformation given by (3) followed by the rotational transformation of (4), the D-STATCOM dynamics can be rewritten as: (6) (7) (8)
where and it is a function of time. The and are the D-STATCOM output ac voltage in the dq
reference frame, , and represent the state variables of the D-STATCOM, is a constant value depending on the type of converter and transformer ratio, while and are the control inputs.
III. DESIGN FOR COMPENSATING CURRENT CONTROLLERS OF D-STATCOM
A. Current Control Strategy The equations in (6) and (7) are used for designing the D-
STATCOM current controller. These equations clearly show that the D-STATCOM output currents are induced by its output voltage modulation. In addition, the ac output voltage and DC voltage of the converter can be separately controlled if the pulse width of the voltage waveform of the VSC can be varied. The DC voltage is regulated at a set value while the
AC output voltage is freely controlled according to the AC voltage command. However, the current control of the converter on the synchronously rotating reference frame (dq-axis) is a two-input two-output system with cross coupling between the active and reactive current. To obtain a decouple-like control for the active and reactive current, (6) and (7) can be modified as: (8) (9)
where the cross coupling terms and are
collected by the actions and , respectively
(10) (11)
Thus, equations (10) and (11) can be rewritten as: (12) (13)
where
Equation (10) shows that an increased active current is induced following the transient in . This is also true for the reactive current in (11). Based on these principles, the control actions and can be expressed as:
(14) (15)
where the proportional-plus-integral (PI) regulators are used to control the D-STATCOM currents in the present work. Once the control actions and are determined, the D-STATCOM output voltage commands and in (14) and (15) can be rearranged as:
(16) (17)
The current control structure for the D-STATCOM and the D-STATCOM output current are detailed in Fig. 2. Since the D-STATCOM control is based on the VSC scheme, the D-STATCOM output voltage commands can be adjusted by using (16) and (17). In addition, the D-STATCOM output AC voltage, , is generated by the VSC with pulse width modulation (PWM) and the D-STATCOM output voltage
![Page 3: [IEEE 2012 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC) - Shanghai, China (2012.03.27-2012.03.29)] 2012 Asia-Pacific Power and Energy Engineering Conference](https://reader043.pdfslide.us/reader043/viewer/2022020609/575082471a28abf34f985a60/html5/page/3.jpg)
commands, and , are the input. The VSC with PWM can be modeled as , where is the dead time.
B. Symmetrical Optimum Design
The PI controllers’ parameters depend on the parameters of the open loop transfer function (i.e., natural frequency ( ), damping coefficient (ζ), and pole value (p)). In general, and ζ characterize the desired system behavior and they are arbitrarily constant, while the location of poles can be chosen. The specific pole locations can be imposed by using supplementary conditions. The conditions for choosing the pole locations refer to the symmetrical optimum method, which simplifies the expressions of the PI parameters. The goal of this scheme is to find the pole locations of the closed-loop transfer function, which satisfy the assumptions given by the symmetrical optimum design around , for the transfer function of open-loop system.
The symmetric optimum method is suitable for an open-loop transfer function having a third-order polynomial in the denominator. Consider the classical control loop, as shown in Fig. 3. The controller is of PI type as described in (18) – (19). The plant model contains an integrator (or may be a large first order delays), and it is characterized by a dominant time constant (Te) and a gain coefficient (k1).
(18) 1 (19)
The proportional gain and integral time constant of the PI controller can be calculated in the following forms [12] : (20) 4 (21)
C. PI Controller Design of the Current Control To simplify the design, the power converter dead time
( ), the time delay of the feedback filter and the sampling
period ( ), and the digital signal processing delay ( ) can be combined as:
(22)
However, with the switching frequency, , the statistical delay of the PWM converter is . , the feedback delay
(average) is . and the delay of the discrete-time signal
processing is . The sum of the small time constant, , is in
the range of . to [13]. Therefore, the open-loop transfer function (Fig. 2) is given as:
, (23) , (24)
where and are the proportional gain and integral time of PI controllers. The choice of optimal current controller parameters depends on the interfacing inductor time constant
related to the sum of all other small time constants. However, in general the interfacing inductor time constant is four-times greater than . Hence, if the system to be controlled includes the delay whose time constant is larger than 4 , it is allowable for the controller to be designed in accordance with the symmetrical optimum. The symmetrical optimum method to compute the proportional gain, , and integral time, , of PI controllers can be obtained as in (20) and (21) where is the open-loop transfer function gain and the integral controller gain can be expressed as .
IV. SIMULATION RESULTS AND DISCUSSION TABLE I
PARAMETERS OF THE D-STATCOM
The parameters of the D-STATCOM used to validate the proposed models and control approaches are shown in Table I. Given that 0.0001, the PI controller’s parameters of the current control can be obtained as:
.. 500 4 4 0.0001 0.0004
The D-STATCOM parameters The interfacing resistance and inductance ( and )
0.1 Ω and 10 mH
The constant value of converter ( )
0.55
The DC link voltage ( ) 30 kV
The DC link capacitance ( )
200 F
The capacitor leakage resistance ( )
61.273 k Ω
The switching frequency ( )
10 kHz
( )CG s ( )G s( )C s( )R s
Fig. 3. Classical control system.
+ IP
KK
s 1
11sT +
*fdi
fdi
fdidx
fqi
tdv*stdv
+ IP
KK
s
*fqi qx *
stqv
tdVstdv 1
fR
stqv
fLω
fLωfLω
fLωfqi
1
11sT +
1fR
fR
fR
∗du
∗qu
÷
÷
pk dcv
+1p dc
d
k v
sT
+1p dc
d
k v
sT
Fig. 2. Current control structure for the D-STATCOM and the D-
STATCOM output current.
![Page 4: [IEEE 2012 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC) - Shanghai, China (2012.03.27-2012.03.29)] 2012 Asia-Pacific Power and Energy Engineering Conference](https://reader043.pdfslide.us/reader043/viewer/2022020609/575082471a28abf34f985a60/html5/page/4.jpg)
It is now possible to clarify the concept of symmetrical
optimum. Fig. 4 shows the frequency characteristics of the individual system elements in the loop and the resultant open loop frequency responses of the current control loop. This line 4 trace for the modulus of the open loop transfer function shows symmetry of the corner points and with respect to
the gain crossover frequency on the 0 dB line. If the control loop is adjusted in accordance with the symmetrical optimum, the behavior is dependent on the sum of the time constants of the small delays in the control loop.
Performance of the D-STATCOM model and the controllers designed above were verified through computer simulation performed in SIMULINK/MATLAB. The current controllers with and without the decoupling are compared. To study the current control, it is noted that the D-STATCOM DC voltage is kept constant. Fig. 5 compares the response of the current controller with and without the decoupling to step changes in the reference D-STATCOM currents, i.e. active and reactive current from 0 (A) to -400 (A), -400 (A) to 0 (A) and 0 (A) to 400 (A). As can be seen, the current controller with the decoupling gives the best dynamic response. The current controller with the decoupling gives smaller oscillation in the
active current when step changes in the reference reactive current as shown in Fig. 5(a). Similarly, when step changes in the reference active current, the current controller with the decoupling gives smaller oscillation in the reactive current as shown in Fig. 5(b). However, the response of the reactive and active current to step change in its reference have the same response for both controllers, with and without the decoupling.
V. CONCLUSION This paper proposed the system modeling and controller
design of current control of D-STATCOM. The modeling strategy similar to that used for the field oriented control of three-phase ac machines is used. The D-STATCOM current decoupling control based on the dq reference frame is used. The symmetrical optimum method is applied to obtain the proportional and integral gains of the PI controllers. The current controller with and without the decoupling are compared. In comparison, the simulation results show that the decoupling current control with the symmetrical optimum method designed gives a better performance.
REFERENCES [1] A. Ghosh, and G. Ledwich, Power quality enhancement using custom
power devices. Massachusetts: Kluwer Academic, 2002. [2] P. S. Sensarma, K. R. Padiya, and V. Ramanarayanan, “Analysis and
Performance Evaluation of a Distribution STATCOM for Compensating Voltage Fluctuations,” IEEE Trans. Power Del., vol. 16, no. 2, pp. 259 – 264, 2001.
[3] C. Hochgraf, and R. H. Lasseter, “Statcom controls for operation with unbalanced voltages,” IEEE Trans. Power Del., vol. 13, no. 2, pp. 538 – 544, 1998.
[4] C. Schauder, and H. Mehta, “Vector analysis and control of advanced static VAr compensators,” Proc. Inst. Elect. Eng. C, Gen. Transm. Distrib., Jul 1993, pp. 299 – 306
[5] E. Acha, V. G. Agelidis, O. Anaya-Lara, and T. J. E. Miller, Power Electronic control in Electrical system, Oxford: Reed Educational and Professional, 2002.
[6] C. Schauder, M. Gernhardt, E. Stacey, T. Lemak, L. Gyugyi, T.W. Cease, and A. Edris, “Development of 100 MVAr static condenser for voltage control of transmission systems,” IEEE Trans. Power Deliv., vol . 10, no. 3, pp. 1486 – 1496, 1995.
[7] Woei-Luen Chen, Wei-Gang Liang, and Hrong-Sheng Gau, “Design of a mode decoupling STATCOM for voltage control of wind-driven induction generator systems,” IEEE Trans. Power Deliv., vol. 25, no. 3, pp. 1758 – 1767, 2010.
[8] M. G. Molina, and P. E. Mercado, “Control design and simulation of DSTATCOM with energy storage for power quality improvements,” IEEE/PES Transmission & Distribution Conf. Exposition, Latin America, TDC '06, 15-18 August 2006, pp. 1 – 7.
[9] C. K. Sao, P. W. Lehn, M. R. Iravani, and J. A. Martinez, “A benchmark system for digital time-domain simulation of a pulse-width-modulated D-STATCOM,” IEEE Trans. Power Deliv., vol. 17, no. 4, pp. 1113 – 1120, 2002.
[10] P. W. Lehn, and M. R. Iravani, “Experimental evaluation of STATCOM closed loop dynamics,” IEEE Trans. Power Deliv., vol. 13, no. 4, pp. 1378 – 1384, 1998.
[11] A. Jain, K. Joshi, A. Behal, and N. Mohan, “Voltage regulation with STATCOMs: modeling, control and results,” IEEE Trans. Power Deliv., vol. 21, no. 2, pp. 726 – 735, 2006.
[12] Friedrich Frohr and Fritz Orttenburger, Introduction to electronic control engineering. New Delhi: Second Wiley Eastern Reprint, 1992.
[13] Marian P. Kazmierkowski, R. Krishnan, and Frede Blaabjerg, Control in power electronics selected problems. California: Elsevier Science, 2002.
fqi
fdi
fdi
fqi
fdi
fdi
fqi
fdi
fdi
(a) Step changes in the reference reactive current.
fqi
fqi
fdi
fqi
fqi
fdi
fqi
fqi
fdi
(b) Step changes in the reference active current.
Fig.5. Response of the current controller with and without the decoupling to step changes in the reference D-STATCOM currents.
500dqkp = 61.25 10dqki = ×( 0.0001 )eT s= 1
eT
12 eT
14 eT
1
eT1
2 eT1
4 eT
Fig. 4. Bode diagram of the current control loop.



















![cse.uet.edu.pk...[49] Arshad Farhad,Y.Z,Sajid Farid,Faisal Bashir,"A Traffic Aware Dynamic Superframe Adaptation for the IEEE 802.15.4 Based IEEE Asia Pacific Conference on](https://img.pdfslide.us/doc/110x75/5fc358abafa7b322657e71c9/cseuetedupk-49-arshad-farhadyzsajid-faridfaisal-bashira-traffic.jpg)