Embed Size (px)
Citation preview
![Page 1: [IEEE 2010 IEEE International Conference on Electro/Information Technology (EIT 2010) - Normal, IL, USA (2010.05.20-2010.05.22)] 2010 IEEE International Conference on Electro/Information](https://reader036.pdfslide.us/reader036/viewer/2022081814/57509f9a1a28abbf6b1b264f/html5/thumbnails/1.jpg)
Understanding the Capabilities of a Vehicle Ad-Hoc Network for Highway Systems
Roberto G. Aldunate, Applied Research Associates, Champaign, IL, USA [email protected]
Abstract - Real time situational awareness has the potential to improve the response and management of intelligent transportation system (ITS) components in critical situations. In the event of sudden or potentially dangerous situations, such as hazardous material spills or reckless driving, every second counts to reduce the overall impact of the event. Currently, assessing surface deterioration and identifying unsafe conditions can be costly and timely to a monitoring agency, and often requires traffic control and other delays to the users of a highway system. Utilizing vehicles as probes to sense and collect these data would give traffic and agency planners a continuously updated view of the network. This article introduces a model to analyze the feasibility of achieving near-real-time situational awareness for highway systems by Vehicle Ad-hoc Networks (VANETs). Each vehicle acts as a data collection probe, gathering information such as surface friction and distress, and is enabled with short-range wireless technology, allowing condition awareness broadcasts to be propagated to other vehicles. The analysis suggests it would be possible to provide awareness up to several kilometers away from the location of the issue in a near-real-time manner, provided adequate traffic density. This approach is envisioned to be particularly suitable for critical traffic monitoring, such as in emergency management and homeland security applications related to transportation systems.
I. INTRODUCTION
Near-real-time information regarding the condition of pavement and potentially hazardous situations on highways could significantly impact the safety, usability, and maintenance of highway systems [2]. Early detection of problems like icy roads, traffic obstructions, reckless drivers, and police chases, may substantially benefit both drivers and transportation agencies.
One approach to achieve this goal is to deploy infrastructure components able to sense their physical surroundings, including traffic units. However, such infrastructure components may be too costly for many highway administration agencies.
Figure 1 - VANET comprised of vehicles acting as both probes and communication nodes. This network provides near-real-time situational awareness for both vehicles and agencies
An alternative approach consists of establishing a cooperative vehicle-highway system where vehicles and infrastructure components interact with each other, creating an integrated system [3, 4]. This idea relies on the use of vehicles as data collection probes, thus spreading out the cost among the relevant stakeholders involved in the transportation sector. These actors may include automobile makers, Federal agencies, and the drivers themselves, provided that significant benefits are obtainable. For agencies and drivers, one clear benefit is the precise and opportune near-real-time information about roadway conditions and other issues which may affect both safety and comfort.
The research presented in this article aims to clarify the role that vehicles acting as probes may play in achieving near-real-time monitoring of highway systems. For this purpose, the analysis considers infrastructure components primarily serving in a passive role (i.e., they do not affect the near-real-time awareness process in areas close to the occurrence of an issue on a road). Figure 1 illustrates the functionality under study in this article, a VANET or peer-to-peer system, which is under permanent analysis within the ITS community [5, 6, 7]. The next section describes a simple yet useful discrete model developed to
978-1-4244-6875-1/10/$26.00 ©2010 IEEE
![Page 2: [IEEE 2010 IEEE International Conference on Electro/Information Technology (EIT 2010) - Normal, IL, USA (2010.05.20-2010.05.22)] 2010 IEEE International Conference on Electro/Information](https://reader036.pdfslide.us/reader036/viewer/2022081814/57509f9a1a28abbf6b1b264f/html5/thumbnails/2.jpg)
understand the potential support for real-time operations that this approach may provide.
II. AWARENESS MODEL
Let us consider a route R of length L units with two lanes, though our model starts considering only the lane in which the detector is moving. Each unit of this road corresponds to the space usually occupied by a car (~ 7.5m), and input and output flows from R equal so that a constant traffic density � and a constant total number of vehicles are considered (see Figure 2). At time t=0 at unit L/2 in the route, an issue is detected by a vehicle. Let us call that vehicle the detector. Each vehicle is equipped with short-range radio frequency (RF) capability so that the vehicle can directly communicate with any of its 1-hop neighbors. These 1-hop neighbor vehicles are at a distance less than or equal to the wireless communication range, C. Initially, no other vehicles are aware of the issue detected by the detector. The detector’s 1-hop neighbors receive the message and forward it to their own 1-hop neighbors. In this manner, the message is propagated through the upstream and downstream traffic flow. It is assumed that the detected issue does not affect the traffic characteristics (i.e., density, flow, and speed).
Figure 2 - Schematic example for situational awareness in a
highway.
Let xt be the fraction of vehicles aware of the detected issue, at time step t, and yt the fraction of the vehicles that are not aware of the issue at time step t. L is considered long enough so that [ ]1,0, ∈tt yx , and
1=+ tt yx t∀ (1)
In this model, a time step is considered as the time elapsed since a short-range RF enabled device receives a message and forwards it to its 1-hop neighbors, plus the
RF traveling time. As this time is significantly less (~1 - 10ms) than the time required for a vehicle to move 1 meter (~30ms, at 75 mph), the position of the vehicles during the awareness process is modeled as stationary.
The stochastic system described above can be written as a Markov process, represented by the following coupled iterative maps [1]:
xytyxttt pxpyxx −+=+1 (2)
yxtxyttt pypxyy −+=+1 (3)
Where, pxy and pyx represent the transition probabilities (per time step) between the two states.
Then, using (1) in (2) and (3) we obtain:
xytyxttt pxpxxx −−+=+ )1(1 (4)
yxtxyttt pypyyy −−+=+ )1(1 (5)
At the steady-state we have tt xx =+1 and tt yy =+1 that when used in (4) and (5) gives us:
xyyx
yx
ppp
x+
= , xyyx
xy
ppp
y+
= (6)
To understand the possible solutions for this system, we need to elaborate on the transition probabilities.
A. Transition probabilities
Considering the layout described in Figure 2, the probability for a vehicle in position k to become aware of a particular issue after t time steps is modeled as:
RIkyx pptp *)( = (7)
With: kIp = the conditional probability that enough time has
passed at time step t for a vehicle at position k to be informed of the issue at L/2:
��
��� >>=
otherwiseCkt
CL
pkI
02
1 (8)
kRp = the probability that the message sent by the
detector, through the mobile ad hoc network, reached the vehicle at position k without interruption caused by a large vehicle gap:
L
}1 unit = 7.5m
kth position from L/2
Issue at L/2
: :
:
Wireless Communication Range (C)
:
: :
:
![Page 3: [IEEE 2010 IEEE International Conference on Electro/Information Technology (EIT 2010) - Normal, IL, USA (2010.05.20-2010.05.22)] 2010 IEEE International Conference on Electro/Information](https://reader036.pdfslide.us/reader036/viewer/2022081814/57509f9a1a28abbf6b1b264f/html5/thumbnails/3.jpg)
1+=
CCp k
R ρρ
C
Cp kR ρ
ρ 1−= (9)
Where, � is the traffic density (vehicles/length).
To model kIp , it is first considered that there is perfect
connectivity (i.e. no vehicle gaps greater than C) from the detector to the vehicle at position k. As that message propagates through the mobile ad hoc network, it will advance C units every time step. Therefore, if enough time steps have elapsed to reach vehicle k, then that vehicle will be aware of the issue ( k
Ip = 1), otherwise it
will not ( kIp = 0).
Next, kRp was considered proportional to the relationship
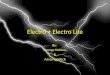
between the average distance among vehicles and the communication range (C). Specifically, the smaller the average distance between two consecutive vehicles (i.e., 1/�) compared to C, the smaller the chances a gap of larger than C will be found. Any such gap larger than the communication range will stop the message propagation through the network. Figure 3 illustrates how message propagation becomes more vulnerable as the communication range decreases.
Figure 3 - Probability a message propagates to all vehicles in a highway segment, depending on the wireless technology used and traffic density. Dedicated Short Range Communication
(DSRC), providing an approximate C of 1,000m, will make the system less vulnerable than WiFi, which provides an approx. C
of 100m.
Next, Using kIp and k
Rp , the transition probability from y to x can be calculated as the average probability for 0 < k < L:
�=
���
�
�+
=2/
112 L
k
kyxyx p
CC
Lp
ρρ
(10)
Replacing (8) in (10) we obtain the final expression for pyx (see Figure 4):
)1(2 2
+=
CLtCpyx ρ
ρ (11)
Figure 4 - Probabilities (average) for vehicles, located upstream
and downstream from a point in the road where an issue has been detected, to become aware of it, depending on density �.
Now, let us take a look at how the transition probability from x to y can be modeled in a simpler manner. As was previously mentioned, the simplest model corresponds to the one where no vehicle goes from the aware state to the unaware state for a particular issue (i.e., pxy = 0). In this model, it is considered that the memory of vehicles is finite, and that the relevance of an issue for a vehicle and its neighbors may fade away as the vehicle moves away from the point where an issue was detected in the road. For simplicity, in this draft it is considered that the probability pxy is constant. In a real system, this probability is:
λ=xyp (12)
B. Convergence
The attractor in (6) states that if pyx is greater than pxy, the system will be able to converge to a state where there will be more vehicles aware of the issue than vehicles unaware of it. In particular, if pxy = 0, meaning that once vehicles become aware of an issue they do not “forget” it, the system will eventually converge to a state where all the vehicles are aware of the issue. Nevertheless, it could
00.10.20.30.40.50.60.70.80.9
1
00.
080.
16
0.24
0.32 0.
40.
48
0.56
0.64
0.72 0.
8
0.88
0.96
Traffic density
Prob
.
1-Lane C=1,000m1-Lane C=100m2-Lane C=100m
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Time step
Pyx
0.001
0.01
0.1
0.8
![Page 4: [IEEE 2010 IEEE International Conference on Electro/Information Technology (EIT 2010) - Normal, IL, USA (2010.05.20-2010.05.22)] 2010 IEEE International Conference on Electro/Information](https://reader036.pdfslide.us/reader036/viewer/2022081814/57509f9a1a28abbf6b1b264f/html5/thumbnails/4.jpg)
be reasonable to design a system where some of the vehicles moving away from the issue point may forget it, that is to say, the issue fades away with distance.
Figure 5 - Impact of traffic density on the time steps required to
achieve full awareness. Time steps to convergence increase non-linearly as traffic densities decrease.
To evaluate the speed of convergence towards a state where all the vehicles in the route segment of length L are aware of the issue, we analyze when (11) equals 1. The graph shown in Figure 5 illustrates the impact of � on the number of time steps required to reach full awareness in a route segment of length L = 15km, about an issue detected by a vehicle at L/2, and considering RF communication ranges of 500m and 1,000m (Bishop, 2005). It is observed in this graph that the larger the wireless communication range, the lower the number of time steps required for complete awareness of an issue. Specifically, for � > 0.1, an awareness message would be completely spread through the whole route segment. Such full awareness status would be reached in a number of time steps equivalent to the number of segments of length C within the whole segment L. Nevertheless, if � < 0.1, the time steps required for achieving full awareness will increase non-linearly; eventually, for very low values of �, no awareness will be reached, almost independently of the value of C.
So far, the analysis has only considered one lane of the road. A second lane has a net effect on k
Rp . As � remains constant, and assuming the distribution of vehicles on the road segment is homogeneous, the average distance between vehicles reduces to half the average distance existing for the one lane case, 1/(2�). This means that (9) can be written as:
1+=
CNCN
pl
lkR ρ
ρ (13)
Where Nl is the number of lanes present in the highway segment. The impact of this factor can be appreciated in Figure 3; it increases the chances of propagating messages through the ad hoc wireless network. From the perspective of message propagation, the result of adding a second lane to the system is equivalent to doubling the communication range (i.e., considering a curve tagged “2-lane C=100m”, the results are identical to the curve tagged “1-Lane C=200m”).
Finally, from the agency perspective, it is important to know how close two consecutive (1-hop) receivers need to be. We may determine this from the following:
dd CtLCLt 2~
2~ (14)
For example, if C=1,000m and td = 50 time steps (~0.5 s, 10ms each time step), then L ~ 100km. To cover the segment of the I-57 interstate connecting Champaign, Illinois, with Chicago, Illinois (approximately 250 km apart, there would need to be three infrastructure wireless enabled receivers if a delay of 0.5 s is accepted.
III. DISCUSSION
The system described in this article considers wireless enabled infrastructure components having a passive role, not an active role. In this context, active role means the component will not only receive messages, but will send messages to 1-hop neighbor vehicles. Passive role means only receiving of messages is performed by the component. Infrastructure components having a passive role (i.e., components located at various points on a highway collecting data spread through the wireless medium and transferring them to agency monitors) would not change the dynamics of the described system. The model presented in this article would allow agencies to determine appropriate distances between sensing infrastructure components depending on the delay time they are able to accept in their near-real-time monitoring efforts. Here, real time does not necessarily refer to the time an issue is occurring, but rather to the time it is first detected.
On the other hand, if active wireless enabled infrastructure components are utilized for near-real-time purposes, the number of time steps required to reach a point distant from the point a road issue has been detected could be reduced significantly. Once an active
05
10152025303540
0.01
0.05 0.09 0.13
0.17
0.21
0.25 0.29 0.33
0.37
0.41
0.45
Traffic density
Tim
e st
ep
C=1,000m
C=500m
![Page 5: [IEEE 2010 IEEE International Conference on Electro/Information Technology (EIT 2010) - Normal, IL, USA (2010.05.20-2010.05.22)] 2010 IEEE International Conference on Electro/Information](https://reader036.pdfslide.us/reader036/viewer/2022081814/57509f9a1a28abbf6b1b264f/html5/thumbnails/5.jpg)
infrastructure component receives a message, this message could be brought to any other part of the route with minimum delays. This approach is envisioned to be suitable for critical monitoring like in homeland security applications related to transportation systems.
IV. CONCLUSION
A simple discrete traffic model for near-real-time situational awareness has been introduced in this article. One of the outcomes obtained in this research effort is that, given the current state of transportation-related technology, the propagation of messages can be delayed or not achieved at all only for very small values of traffic densities. Nevertheless, for larger values of traffic density (� > 0.2), one could expect the time taken to propagate a message to be linear with respect to the distance it will reach.
Another important result obtained is the effect of considering multiple lanes in the system, provided they are permanently occupied (as occurs in some high-speed interstate highways and tollways); the probability for message propagation increases almost linearly with the number of lanes. In other words, highways with more lanes (given their higher demand) would allow us to treat the wireless cooperative network comprised of limited-range wireless enabled vehicles as a permanent infrastructure communication means.
REFERENCES [1] Bar-Yam, Y. (1997) Dynamics of Complex Systems. Addison-Wesley, Boston, MA.
[2] Bishop, R. (2005) Intelligent Vehicle Technology and Trends. Artech House, Norwood, MA.
[3] Underwood, S.E., Gehring, S.G. (1994) “Framework for Evaluating Intelligent Vehicle-Highway Systems,” Transportation Research Record, TRB.
[4] Manasseh, C. and Sengupta, R. (2008) “Middleware for Cooperative Vehicle-Infrastructure Systems,” Research Reports, PATH, Institute of Transportation Studies, UC Berkeley.
[5] Herrtwich, R., (2004) “DaimlerChrysler: Vehicle-Oriented Short-Range Communications,” ITS World Congress, Nagoya, Japan, October.
[6] Maihofer, C. (2004) “Car-to-Car Communication for Safety Applications,” ADASE 2, AIDER, CarTALK Final Workshop, July 14. [7] Calefato, C. Cardillo, D. Tango, F. (2009) “Vehicle towards vehicle: Current status and beyond on research about adaptive
and cooperative vehicles and their smart behaviors,” Human System Interactions, 2009, HIS ’09 2nd Conference on. pp. 588-595.