Embed Size (px)
Citation preview

iCat Research Platformresearch platform for human-robot interactioniCat Research Platformresearch platform for human-robot interaction
June [email protected]
June [email protected]
Customer presentation

2Research
Topics
• Hello iCat!
• iCat Research Platform
• Benchmarking
• Concluding remarks

3Research
iCat – user interface robot• Desktop model user-interface
robot with mechanically rendered face
• Purpose: studying social human-robot interaction
• Our goal: building international research community
• Our expertise:– Robot middleware– Animated robots– Human-robot interactioniCat

4Research
Topics
• Hello iCat!
• iCat Research Platform
• Benchmarking
• Concluding remarks

5Research
What is the iCat Research Platform?
user-interface robot community supportsoftware
6Research
iCat user-interface robot
USB
iCatLaptop/PC

7Research
iCat user-interface robot

8Research
iCat user-interface robot
• 11x RC servos

9Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
10Research
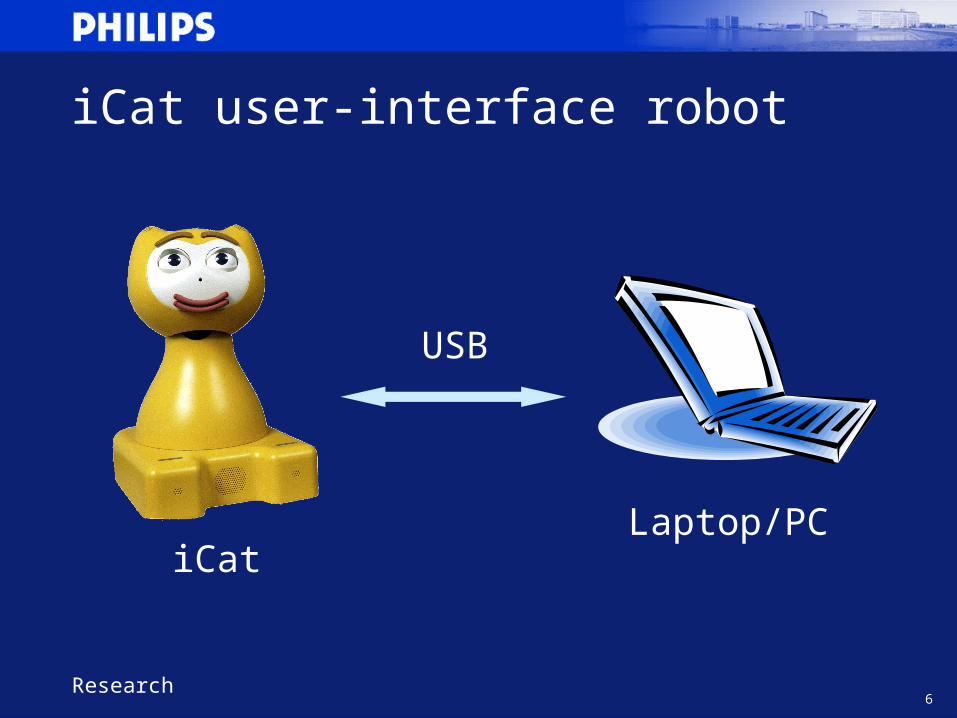
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors

11Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors
• 1x USB webcam

12Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors
• 1x USB webcam
• 1x loudspeaker

13Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors
• 1x USB webcam
• 1x loudspeaker
• 2x microphones

14Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors
• 1x USB webcam
• 1x loudspeaker
• 2x microphones
• 1x USB soundcard

15Research
iCat user-interface robot
• 11x RC servos
• 2x DC motors
• 4x RGB LEDs
• 4x capacitive touch sensors
• 1x USB webcam
• 1x loudspeaker
• 2x microphones
• 1x USB soundcard
• 1x IR proximity sensor
16Research
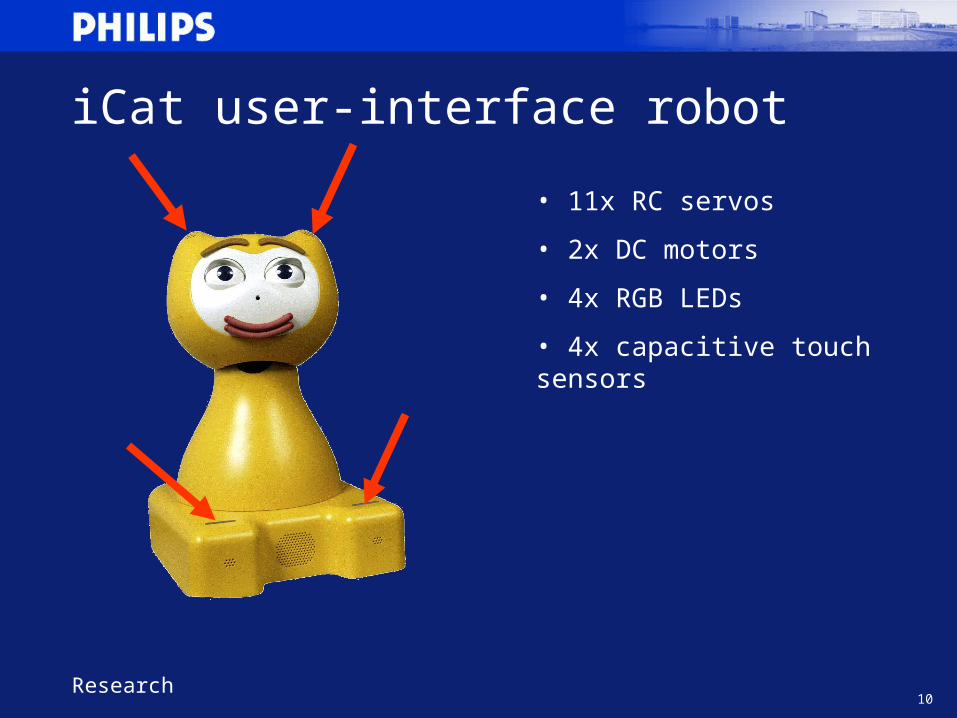
Open Platform for Personal Robotics
Open Platform forPersonal Robotics
Connectivity Intelligence
AnimationArchitecture
Application

17Research
Open Platform for Personal Robotics
Architecture
Dynamic Module Library (DML)• Share software components• Easy integration• Easy distribution

18Research
Open Platform for Personal Robotics
Animation
• Animation Editor• Animation Engine

19Research
Open Platform for Personal Robotics
Intelligence
• Scripting Engine
-- creates DML module port
DML:CreatePort ('Input', 'inputportbufferedstring', 1, -1, 'push', 'NewData()');
-- callback function for inputport
function NewData()
-- read data from input port
data = Input:Receive ()
-- loop until buffer of port is empty
while data ~= nil do
print (data)
data = Input:Receive ()
end
end

20Research
Open Platform for Personal Robotics
Connectivity
• Sockets• Email• RS232

21Research
International research community• Open environment for research & innovation
• Community includes members from international universities and research laboratories
• Research topics include– robot middleware and services– human-robot interaction & collaboration– smart sensors and actuators
• Community infrastructure– website– organize events

22Research
Topics
• Hello iCat!
• iCat Research Platform
• Benchmarking
• Concluding remarks

23Research
Benchmarking
AIBO - Sony PaPeRo - NEC Emiew - Hitachi
Ifbot - BDL Miro - Fujitsu Asimo - Honda

24Research
Benchmarking
iCat - Philips

25Research
Topics
• iCat – user interface robot
• iCat Research Platform
• Benchmarking
• Concluding remarks

26Research
Concluding remarks
• Limited edition will be made available in 2005
• iCat is the only available research platform capable of mechanically rendering facial expressions
• Shipping starts in Q3 2005
• Place orders at [email protected]
http://www.research.philips.com/robotics